
Smart Grid Cost-Emission Unit Commitment via Co-Evolutionary Agents



Abstract
:1. Introduction
2. Stochastic Cost-Emission Reduction Model
2.1. Multi-Scenario Selection
2.2. Cost-Emission Reduction Model under Uncertainties
- PHEVs are considered as loads or sources. Power supplied from distributed generations must satisfy the load demand:
- All registered PHEVs take part in smart grid operations during a scheduling period:where is the total registered PHEVs, and is number of vehicles connected to the grid at hour .
- Number of charging/discharging PHEVs limit
- Generation limit constraints
- Ramp rate limits for unit generation changes
- Minimum up and down time constraintswhere is number of hours that the unit has been on(positive) or off (negative), and are minimum down and up time of unit , in hours, and are ramp-up and ramp-down rate limit of unit , and is the minim output limit of unit .
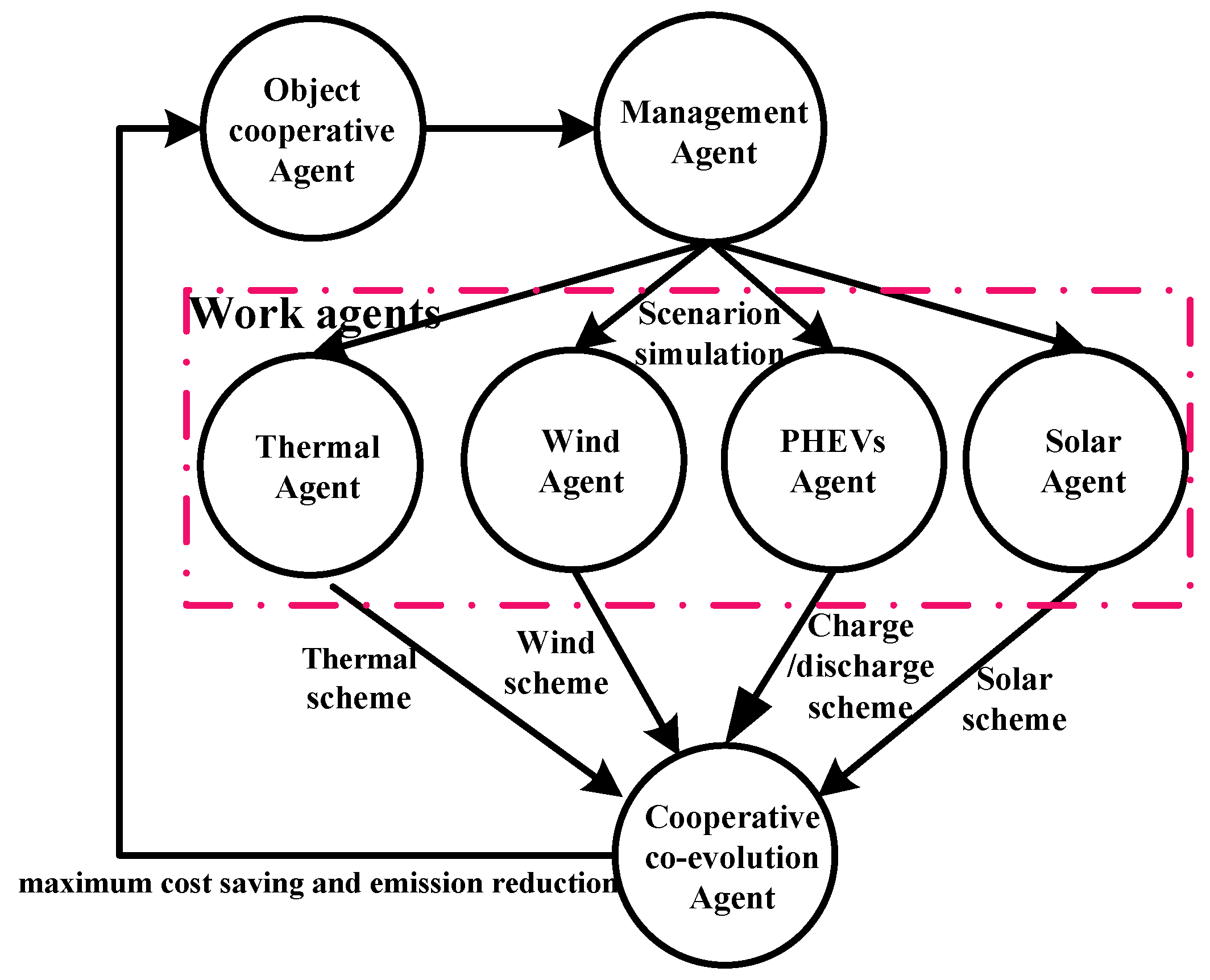
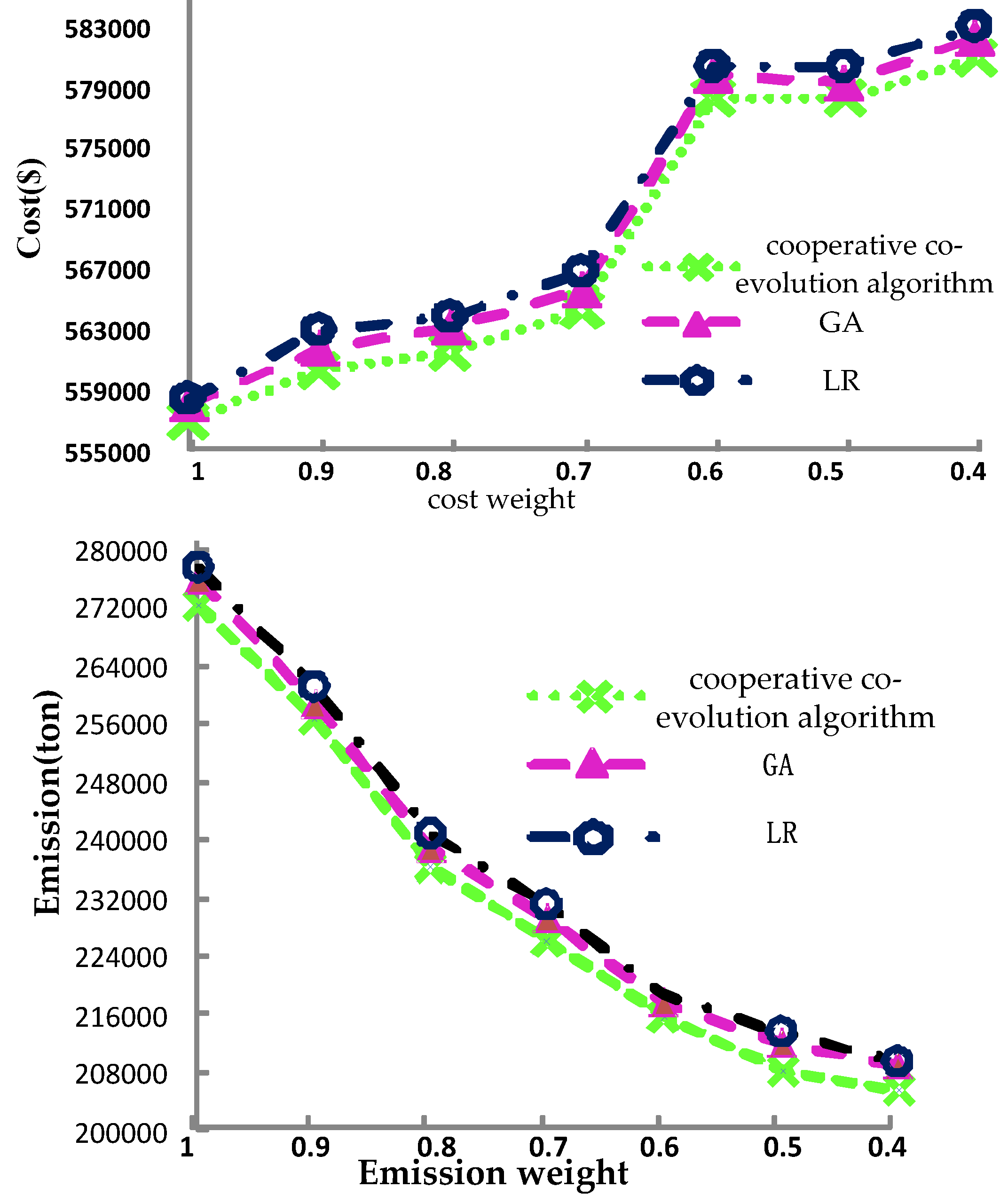
3. The Cooperative Co-Evolution Algorithm
3.1. Multi-Agent System
3.2. The Adaptive Updating of Multipliers
4. Numerical Example
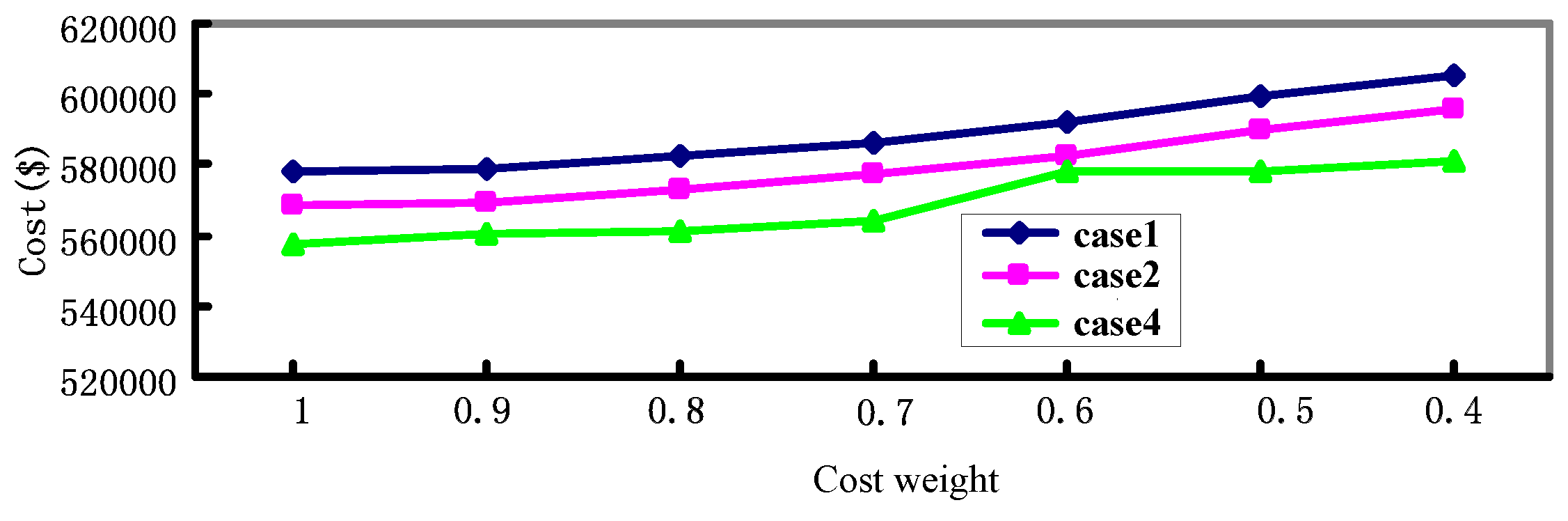
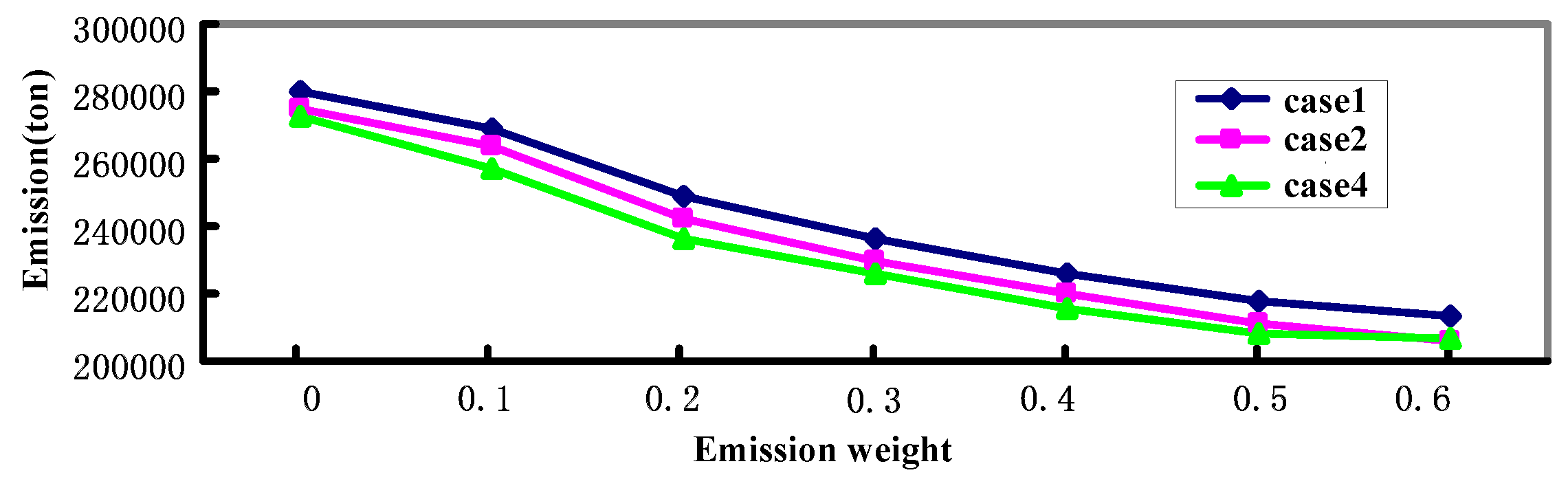
- Case 1
- the 10-unit system with standard input data of power plants, emission coefficients and load demand, considering only PHEVs.
- Case 2
- the 10-unit system with standard input data of power plants, emission coefficients and load demand, with wind power and PHEVs.
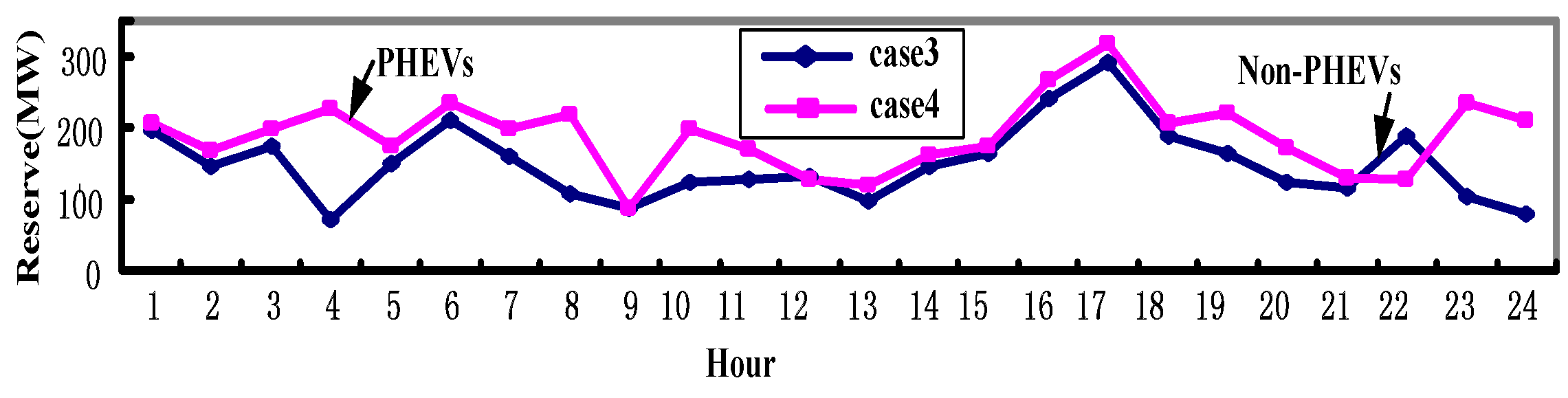
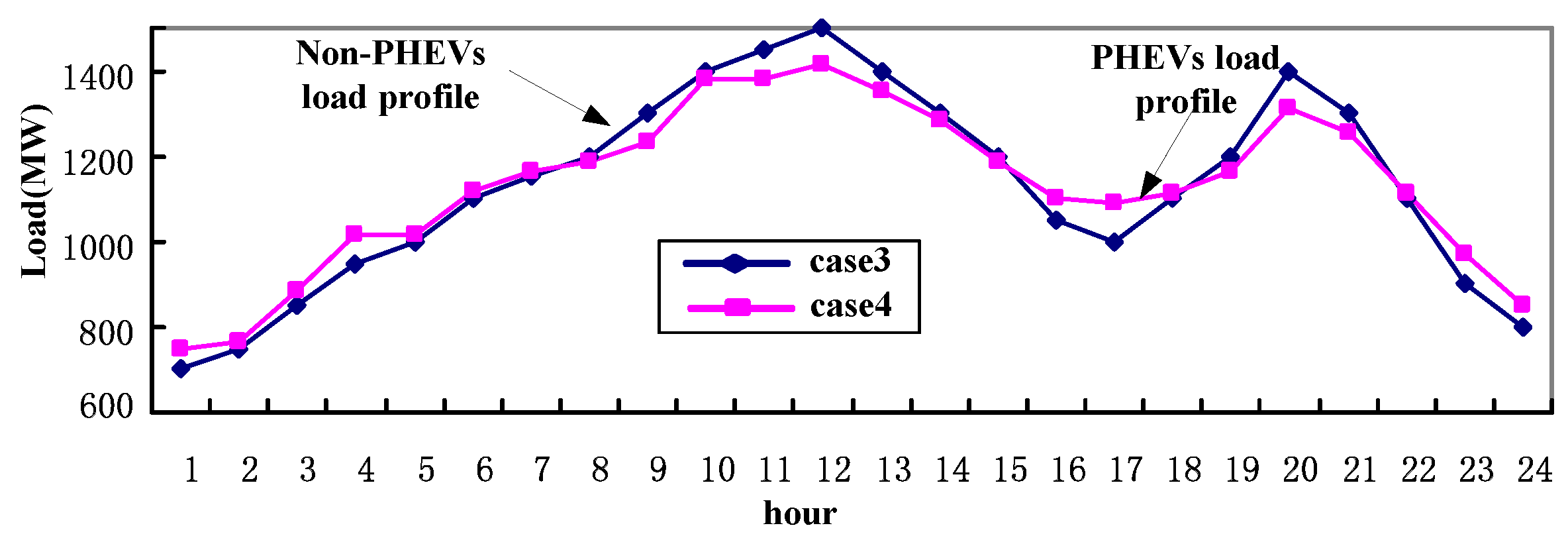
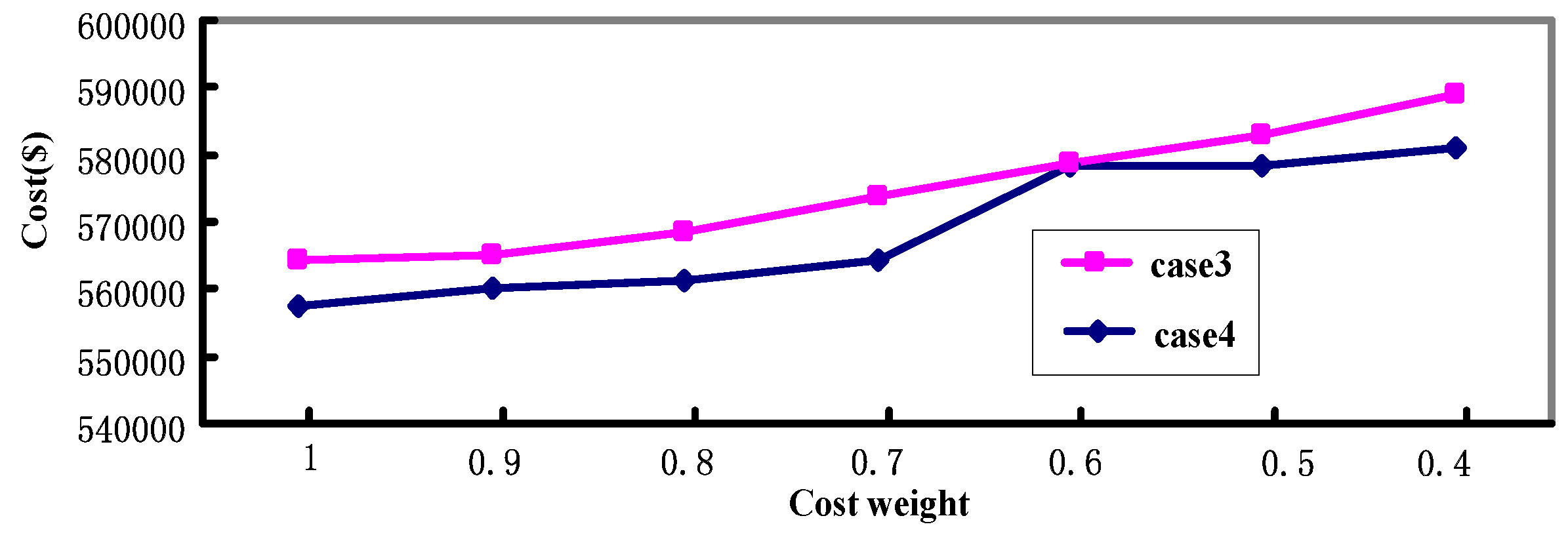
- Case 3
- the 10-unit system with standard input data of power plants, emission coefficients and load demand, with wind and solar power.
- Case 4
- the 10-unit system with standard input data of power plants, emission coefficients and load demand, considering PHEVs, wind and solar power.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Moreno, J.; Ortzar, M.E.; Dixon, J.W. Energy-management system for a hybrid electric vehicle, using ultra capacitors and neural networks. IEEE Trans. Ind. Electron. 2006, 53, 614–623. [Google Scholar] [CrossRef]
- Saber, A.Y.; Venayagamoorthy, G.K. Intelligent unit commitment with vehicle-to-grid-A cost-emission optimization. J. Power Sources 2010, 195, 898–911. [Google Scholar] [CrossRef]
- Hadley, S.W.; Tsvetkova, A. Potential Impacts of Plug-in Hybrid Electric Vehicles on Regional Power Generation; Oak Ridge National Laboratory: Oak Ridge, TN, USA, January 2008. [Google Scholar]
- Sioshansi, R.; Fagiani, R.; Marano, V. Cost and emissions impacts of plug-in hybrid vehicles on the Ohio power system. Energy Policy 2010, 38, 6703–6712. [Google Scholar] [CrossRef]
- Huber, M.; Trippe, A.; Kuhn, P.; Hamacher, T. Effects of large scale EV and PV integration on power supply systems. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference Europe, European, Berlin, Germany, 14–17 October 2012; pp. 1–8.
- Wang, J.; Liu, C.; Ton, D.; Zhou, Y.; Kim, J.; Vyas, A. Impact of plug in hybrid electric vehicles on power systems with demand response and wind power. Energy Policy 2011, 39, 1–6. [Google Scholar] [CrossRef]
- Haque, A.; Mandal, P.; Meng, J.; Negnevitsky, M. Wind speed forecast model for wind farm based on a hybrid machine learning algorithm. Int. J. Sustain. Energy 2015, 34, 38–51. [Google Scholar] [CrossRef]
- Mandal, P.; Zareipour, H.; Rosehart, W.D. Forecasting aggregated wind power production of multiple wind farms using hybrid wavelet-PSO-NNs. Int. J. Energy Res. 2014, 38, 1654–1666. [Google Scholar] [CrossRef]
- Haque, A.; Mandal, P.; Nehrir, M.H. A hybrid intelligent model for deterministic and quantile regression approach for probabilistic wind power forecasting. IEEE Trans. Power Syst. 2014, 29, 1663–1672. [Google Scholar] [CrossRef]
- Haque, A.; Mandal, P.; Meng, J.; Tseng, T.-L.; Senjyu, T. A novel hybrid approach based on wavelet transform and fuzzy ARTMAP network for predicting wind farm power production. IEEE Trans. Ind. Appl. 2013, 49, 2253–2261. [Google Scholar] [CrossRef]
- AlHakeem, D.; Mandal, P.; Haque, A.; Yona, A.; Senjyu, T.; Tseng, T.-L. A new strategy to quantify uncertainties of Wavelet-GRNN-PSO based solar PV power forecasts using bootstrap confidence intervals. In Proceedings of the IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015.
- Wang, J.; Shahidehpour, M.; Li, Z. Security constrained unit commitment with volatile wind power generation. IEEE Trans. Power Syst. 2008, 23, 1319–1327. [Google Scholar] [CrossRef]
- Swider, D.J.; Weber, C. The costs of wind intermittency in Germany: Application of a stochastic electricity market model. Eur. Trans. Electr. Power 2007, 17, 151–172. [Google Scholar] [CrossRef]
- Hargreaves, J.J.; Hobbs, B.F. Commitment and dispatch with uncertain wind generation by dynamic programming. IEEE Trans. Sustain. Energy 2012, 3, 724–734. [Google Scholar] [CrossRef]
- Chakraborty, S.; Ito, T.; Senjyu, T.; Saber, A.Y. Intelligent economic operation of smart-grid facilitating fuzzy advanced quantum evolutionary method. IEEE Trans. Sustain. Energy 2013, 4, 905–916. [Google Scholar] [CrossRef]
- Tuohy, A.; Meibom, P.; Denny, E.; O’Malley, M. Unit commitment for systems with significant wind penetration. IEEE Trans. Power Syst. 2009, 24, 592–601. [Google Scholar] [CrossRef] [Green Version]
- Wind Power Integration in Liberalised Electricity Markets (Wilmar) Project. Available online: http://www.wilmar.risoe.dk (accessed on 1 December 2003).
- Ahmed, Y.S.; Venayagamoorthy, G.K. Resource scheduling under uncertainty in a smart grid with renewables and plug-in vehicles. IEEE Syst. J. 2012, 6, 103–109. [Google Scholar]
- Sheble, G.B. Solution of the unit commitment problem by the method of unit periods. IEEE Trans. Power Syst. 1990, 5, 257–260. [Google Scholar] [CrossRef]
- Ouyang, Z.; Shahidehpour, S.M. An intelligent dynamic programming for unit commitment application. IEEE Trans. Power Syst. 1991, 6, 1203–1209. [Google Scholar] [CrossRef]
- Snyder, W.L., Jr.; Powell, H.D., Jr.; Rayburn, J.C. Dynamic programming approach to unit commitment. IEEE Trans. Power Appl. Syst. 1987, 2, 339–348. [Google Scholar] [CrossRef]
- Simoglou, C.K.; Biskas, P.N.; Bakirtzis, A.G. Optimal self-scheduling of a thermal producer in short-term electricity markets by MILP. IEEE Trans. Power Syst. 2010, 25, 1965–1977. [Google Scholar] [CrossRef]
- Cohen, A.I.; Yoshimura, M. A branch-and-bound algorithm for unit commitment. IEEE Trans. Power Appl. Syst. 1983, 2, 444–451. [Google Scholar] [CrossRef]
- Dang, C.Y.; Li, M.Q. Floating-point genetic algorithm for solving the unit commitment problem. Eur. J. Oper. Res. 2007, 181, 1370–1395. [Google Scholar] [CrossRef]
- Swarup, K.S.; Yamashiro, S. Unit commitment solution methodology using genetic algorithm. IEEE Trans. Power Syst. 2002, 17, 87–91. [Google Scholar] [CrossRef]
- Ouyang, Z.; Shahidehpour, S.M. A hybrid artificial neural network-dynamic programming approach to unit commitment. IEEE Trans Power Syst. 1992, 7, 236–242. [Google Scholar] [CrossRef]
- Logenthiran, T.; Srinivasan, D. Multi-agent system for managing a power distribution system with plug-in hybrid electrical vehicles in smart grid. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Kerala, India, 1–3 December 2011; pp. 346–351.
- Gallehdari, Z.; Meskin, N.; Khorasani, K. Cost performance based control reconfiguration in multi-agent systems. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 509–516.
- Goh, C.K.; Tan, K.C. A competitive-cooperative coevolutionary paradigm for dynamic multiobjective optimization. IEEE Trans. Evolut. Comput. 2009, 13, 103–127. [Google Scholar]
- Shao, S.; Pipattanasomporn, M.; Rahman, S. Challenges of phev penetration to the residential distribution network. In Proceedings of the IEEE PES General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–8.
- Ongsaku, W.; Petcharaks, N. Unit commitment by enhanced adaptive lagrangian relaxation. IEEE Trans. Power Syst. 2004, 19, 620–628. [Google Scholar] [CrossRef]
- Sun, L.Y.; Zhang, Y.; Jiang, C.W. A matrix real-coded genetic algorithm to the unit commitment problem. Electr. Power Syst. Res. 2006, 76, 716–728. [Google Scholar] [CrossRef]
- Kazarlis, S.A.; Bakirtzis, A.G.; Petridis, V. A genetic algorithm solution to the unit commitment problem. IEEE Trans. Power Syst. 1996, 11, 83–92. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit Output (MW) | U-1 | U-2 | U-3 | U-4 | U-5 | U-6 | U-7 | U-8 | U-9 | U-10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Case 4 (MW) | 10,920 | 8034.3 | 2600 | 2860 | 2222.7 | 410.5 | 100 | 20 | 10 | 0 |
| Case 3 (MW) | 10,920 | 8130.3 | 2340 | 2730 | 2275.5 | 544.6 | 125 | 62.1 | 30 | 20 |
| PHEVs Effect (MW) | 0 | −96 | 260 | 130 | −52.8 | −134.1 | −25 | −42.1 | −20 | −20 |
| Cooperative Multiplier Updating Methods | Subgradient | Adaptive |
|---|---|---|
| Cost ($) | 567,255.4 | 561,436.6 |
| Emissions (t) | 239,786.5 | 236,585.4 |
| Operation time (s) | 250 | 132 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Xie, J.; Zhu, Z.; Zheng, J.; Qiang, H.; Rong, H. Smart Grid Cost-Emission Unit Commitment via Co-Evolutionary Agents. Energies 2016, 9, 834. https://doi.org/10.3390/en9100834
Zhang X, Xie J, Zhu Z, Zheng J, Qiang H, Rong H. Smart Grid Cost-Emission Unit Commitment via Co-Evolutionary Agents. Energies. 2016; 9(10):834. https://doi.org/10.3390/en9100834
Chicago/Turabian StyleZhang, Xiaohua, Jun Xie, Zhengwei Zhu, Jianfeng Zheng, Hao Qiang, and Hailong Rong. 2016. "Smart Grid Cost-Emission Unit Commitment via Co-Evolutionary Agents" Energies 9, no. 10: 834. https://doi.org/10.3390/en9100834
APA StyleZhang, X., Xie, J., Zhu, Z., Zheng, J., Qiang, H., & Rong, H. (2016). Smart Grid Cost-Emission Unit Commitment via Co-Evolutionary Agents. Energies, 9(10), 834. https://doi.org/10.3390/en9100834