A Bio-Hygromorph Fabricated with Fish Swim Bladder Hydrogel and Wood Flour-Filled Polylactic Acid Scaffold by 3D Printing



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
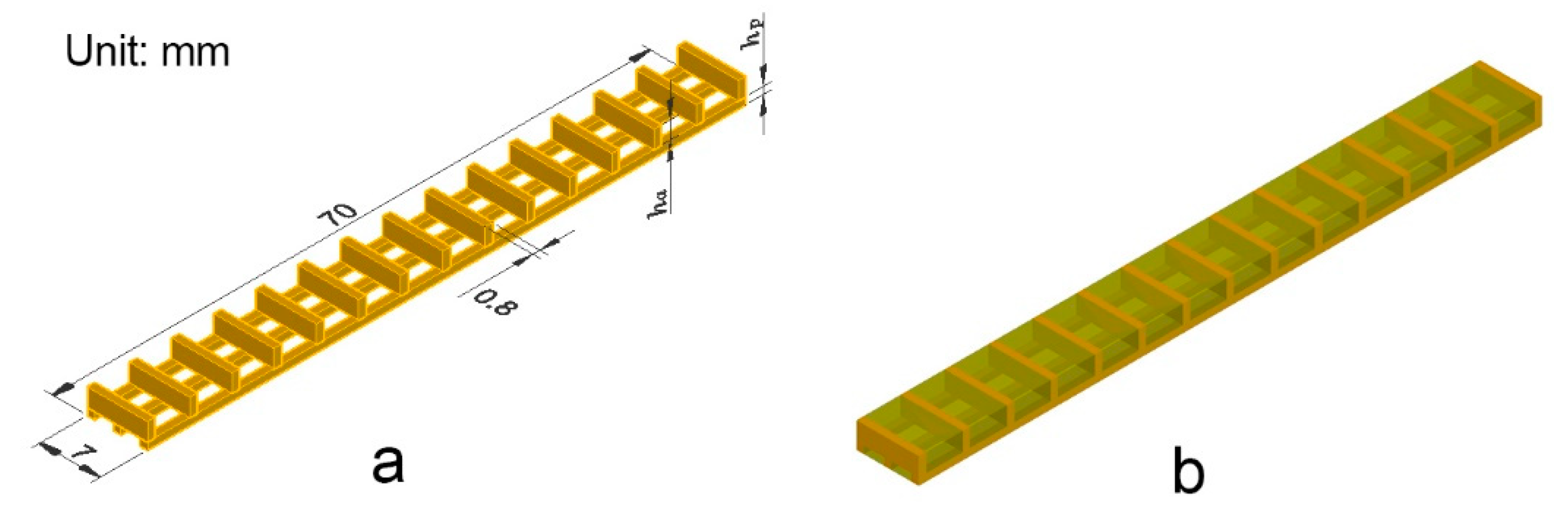
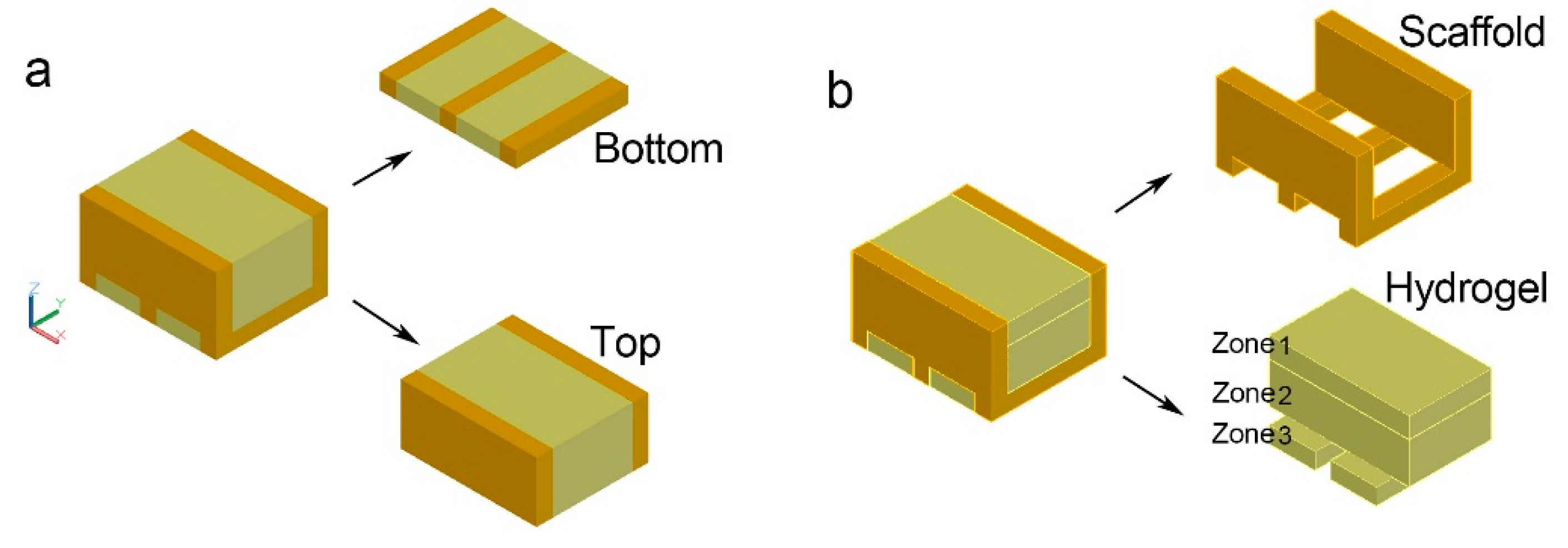
2.1. Composite Structure Design of A Bio-Hygromorph
2.2. Preparation of Fish Swim Bladder Hydrolysates
2.3. Preparation of 3D Printed Scaffold
2.4. Fabrication of Bio-Hygromorph
2.5. Self-Shaping Test Induced by Moisture Content Changing
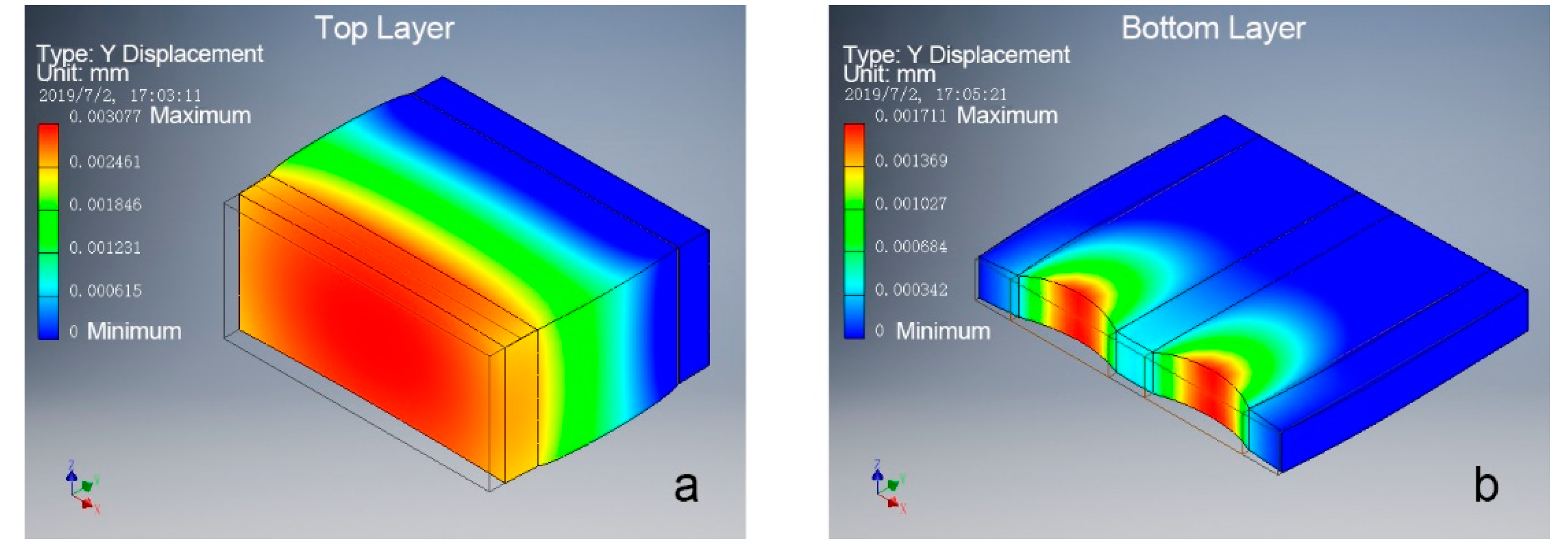
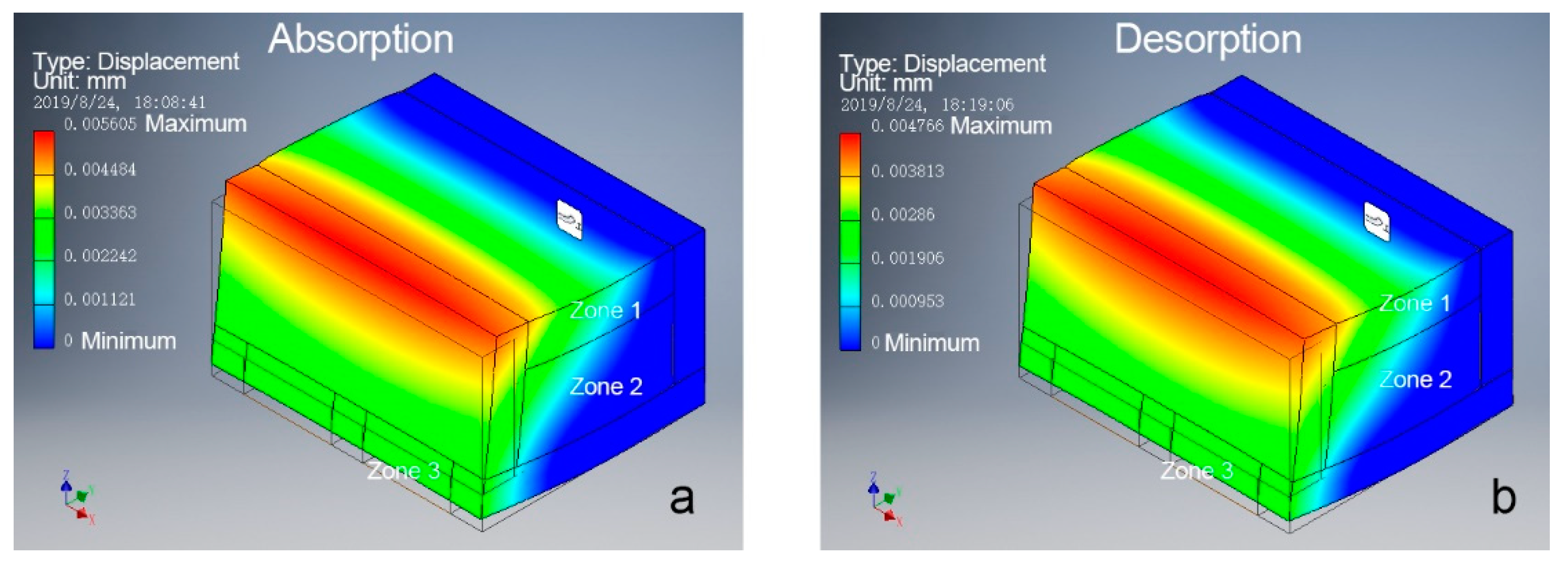
2.6. Finite Element Analysis of Bio-Hygromorph Segment
3. Results and Discussion
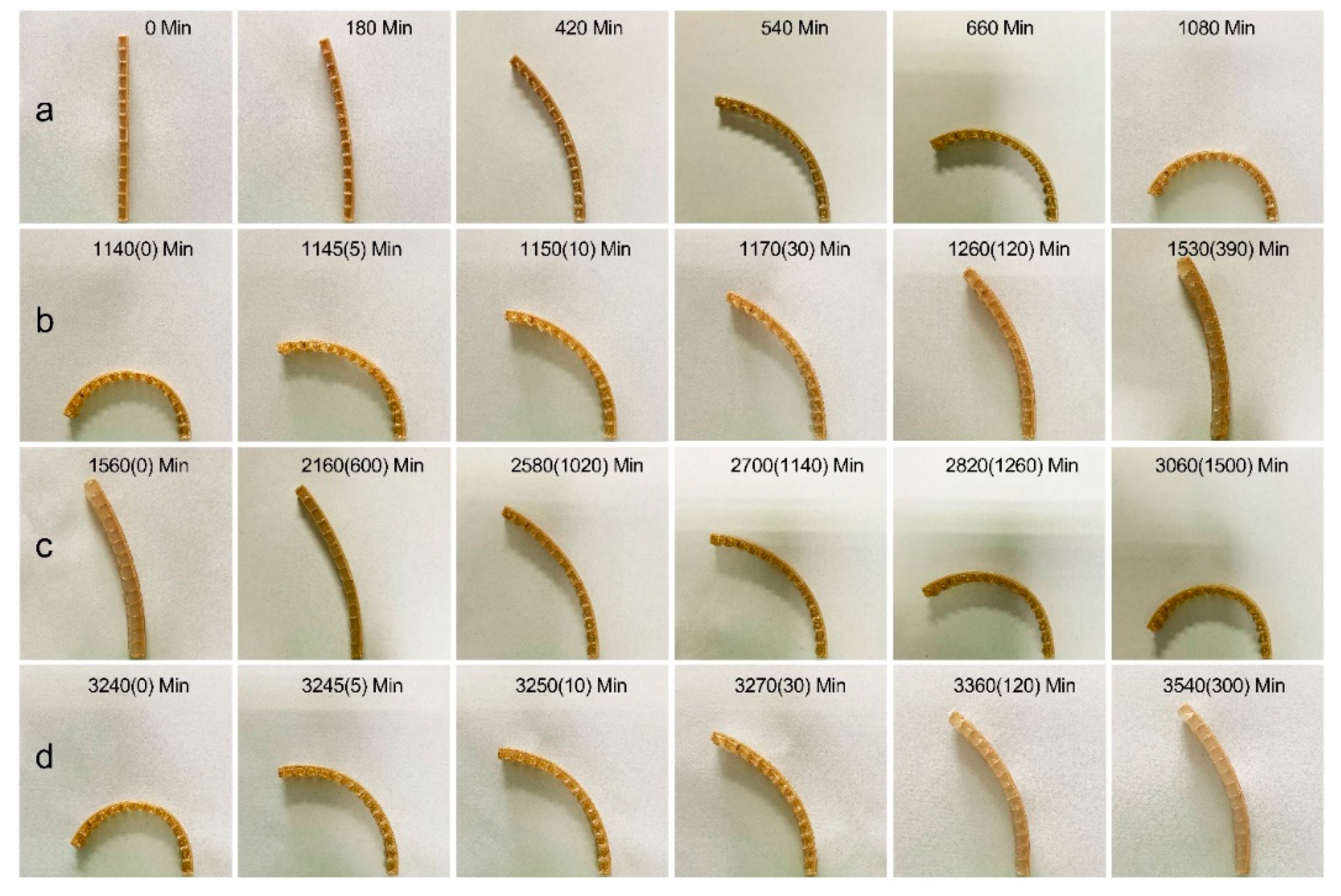
3.1. Shape Changing of Bio-Hygromorph Responds to Moisture Content
3.2. Moisture Content Driven Bending Principles of Bio-Hygromorph
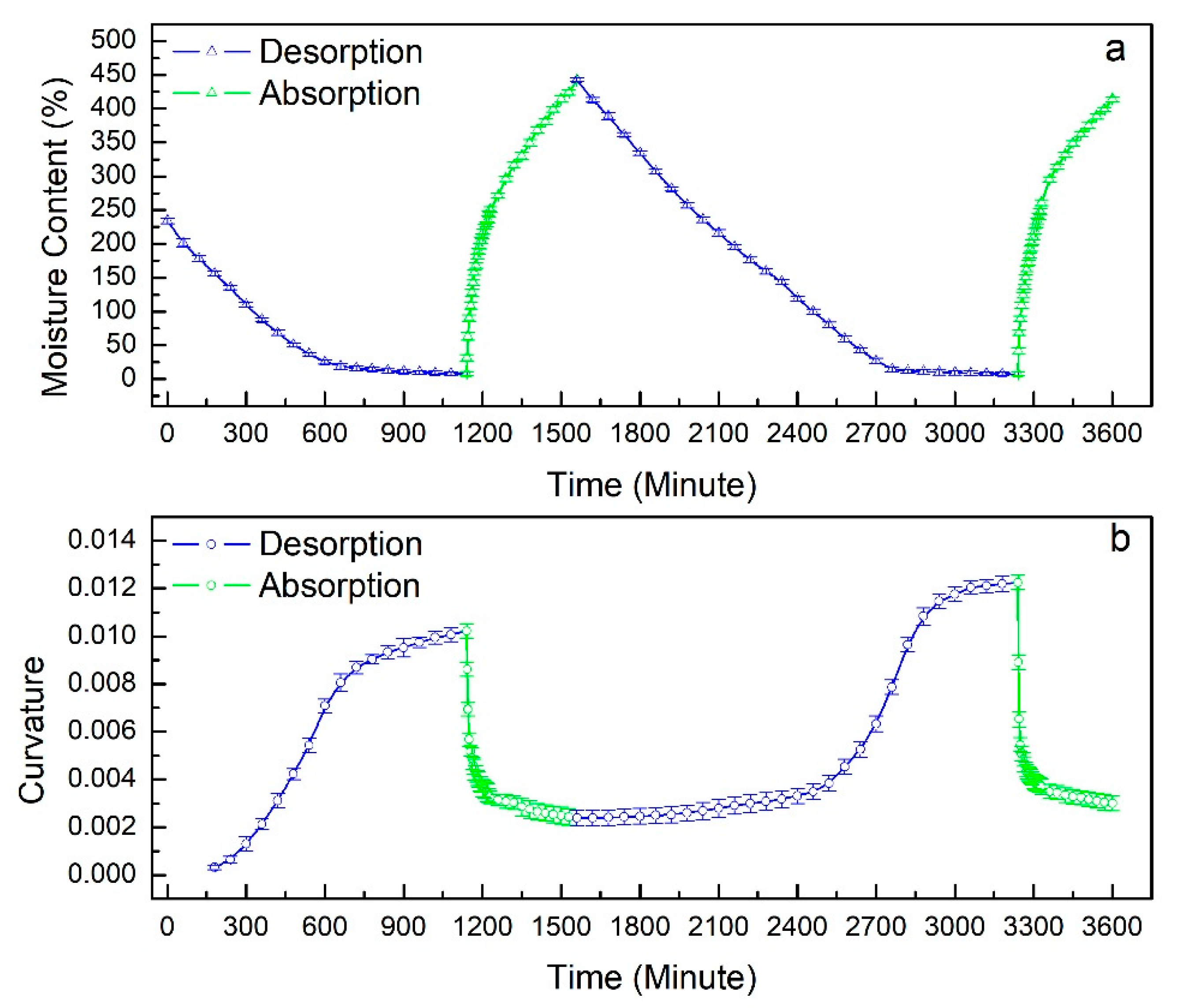
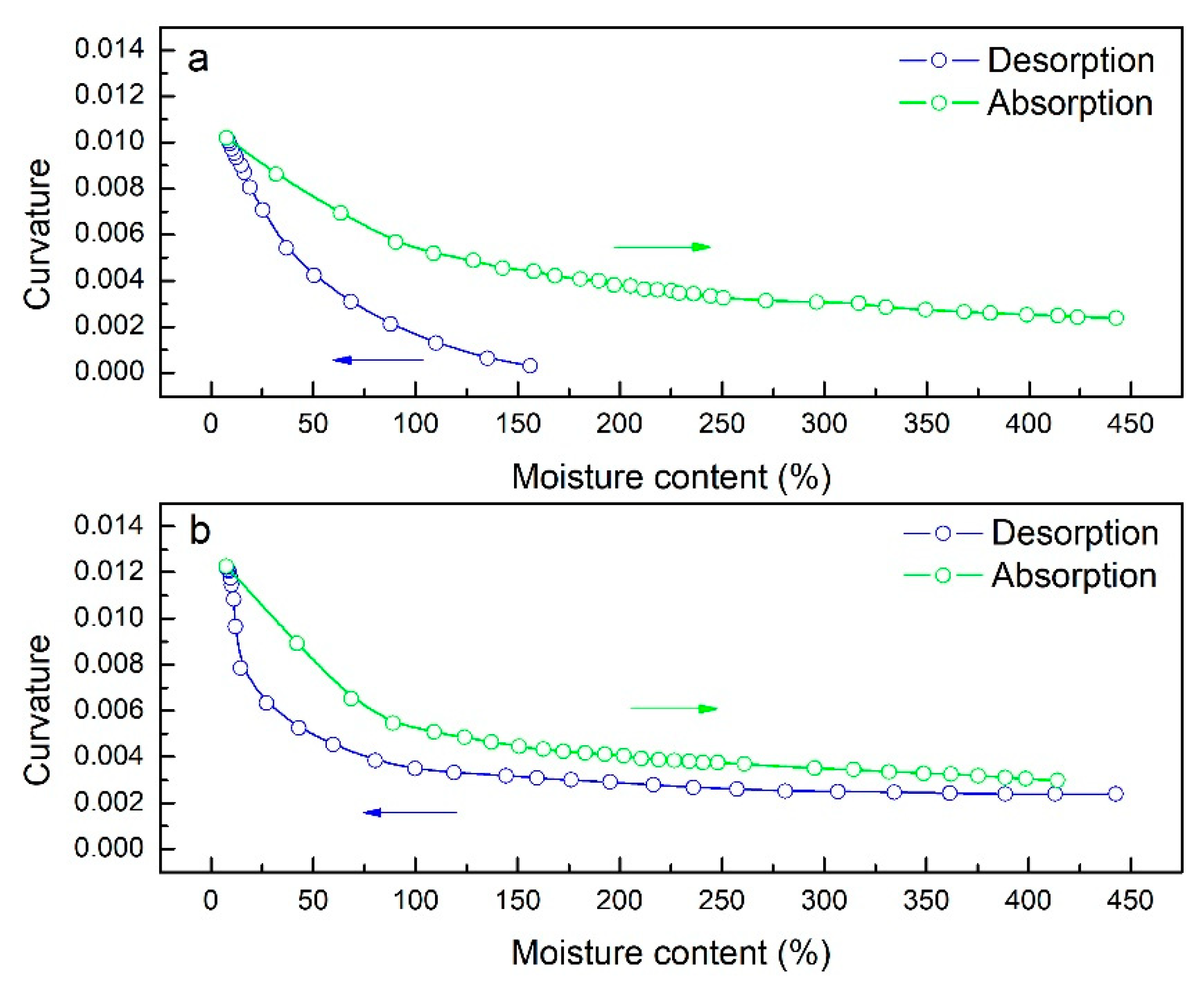
3.3. Relationship between Moisture Content and Curvature of Bio-Hygromorph
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Reyssat, E.; Mahadevan, L. Hygromorphs: From pine cones to biomimetic bilayers. J. R. Soc. Interface 2009, 6, 951–957. [Google Scholar] [CrossRef]
- Li, S.; Wang, K.W. Plant-inspired adaptive structures and materials for morphing and actuation: A review. Bioinspir. Biomim. 2016, 12, 11001. [Google Scholar] [CrossRef] [PubMed]
- Rüggeberg, M.; Burgert, I. Bio-inspired wooden actuators for large scale applications. PLoS ONE 2015, 10, e120718. [Google Scholar] [CrossRef] [PubMed]
- Reichert, S.; Menges, A.; Correa, D. Meteorosensitive architecture: Biomimetic building skins based on materially embedded and hygroscopically enabled responsiveness. Comput. Aided Design 2015, 60, 50–69. [Google Scholar] [CrossRef]
- Vailati, C.; Bachtiar, E.; Hass, P.; Burgert, I.; Rüggeberg, M. An autonomous shading system based on coupled wood bilayer elements. Energ. Buildings 2018, 158, 1013–1022. [Google Scholar] [CrossRef]
- Wang, Z.J.; Zhu, C.N.; Hong, W.; Wu, Z.L.; Zheng, Q. Programmed planar-to-helical shape transformations of composite hydrogels with bioinspired layered fibrous structures. J. Mater. Chem. B. 2016, 4, 7075–7079. [Google Scholar] [CrossRef]
- Zhao, C.; Ren, L.; Song, Z.; Deng, L.; Liu, Q. Structure-driven biomimetic self-morphing composites fabricated by multi-process 3D printing. Compos. Appl. Sci. Manuf. 2019, 123, 1–9. [Google Scholar] [CrossRef]
- Dawson, C.; Vincent, J.F.V.; Rocca, A. How pine cones open. Nature 1997, 390, 668. [Google Scholar] [CrossRef]
- Burgert, I.; Fratzl, P. Actuation systems in plants as prototypes for bioinspired devices. Philos. Trans. A Math. Phys. Eng. Sci. 2009, 367, 1541–1557. [Google Scholar] [CrossRef]
- Burgert, I.; Fratzl, P. Plants control the properties and actuation of their organs through the orientation of cellulose fibrils in their cell walls. Integr. Comp. Biol. 2009, 49, 69–79. [Google Scholar] [CrossRef]
- Elbaum, R.; Zaltzman, L.; Burgert, I.; Fratzl, P. The role of wheat awns in the seed dispersal unit. Science 2007, 316, 884–886. [Google Scholar] [CrossRef] [PubMed]
- Armon, S.; Efrati, E.; Kupferman, R.; Sharon, E. Geometry and mechanics in the opening of chiral seed pods. Science 2011, 333, 1726–1730. [Google Scholar] [CrossRef] [PubMed]
- Le Duigou, A.; Castro, M. Moisture-induced self-shaping flax-reinforced polypropylene biocomposite actuator. Ind. Crop. Prod. 2015, 71, 1–6. [Google Scholar] [CrossRef]
- Erb, R.M.; Sander, J.S.; Grisch, R.; Studart, A.R. Self-shaping composites with programmable bioinspired microstructures. Nat. Commun. 2013, 4, 1712. [Google Scholar] [CrossRef] [PubMed]
- Duan, R.; Zhang, J.; Du, X.; Yao, X.; Konno, K. Properties of collagen from skin, scale and bone of carp (cyprinus carpio). Food Chem. 2009, 112, 702–706. [Google Scholar] [CrossRef]
- Tao, Y.; Pan, L.; Liu, D.; Li, P. A case study: mechanical modeling optimization of cellular structure fabricated using wood flour-filled polylactic acid composites with fused deposition modeling. Compos. Struct. 2019, 216, 360–365. [Google Scholar] [CrossRef]
- Tao, Y.; Wang, H.; Li, Z.; Li, P.; Shi, S.Q. Development and application of wood flour-filled polylactic acid composite filament for 3D printing. Materials 2017, 10, 339. [Google Scholar] [CrossRef]
- Boydston, A.J.; Cao, B.; Nelson, A.; Ono, R.J.; Saha, A.; Schwartz, J.J.; Thrasher, C.J. Additive manufacturing with stimuli-responsive materials. J. Mater. Chem. A 2018, 6, 20621–20645. [Google Scholar] [CrossRef]
- Shafranek, R.T.; Millik, S.C.; Smith, P.T.; Lee, C.; Boydston, A.J.; Nelson, A. Stimuli-responsive materials in additive manufacturing. Prog. Polym. Sci. 2019, 93, 36–67. [Google Scholar] [CrossRef]
- Pan, L.; Li, P.; Tao, Y.; Guo, H. Antimicrobial Agent Effectiveness of Fish Glue Prepared by Heat Treatment and Enzymatic Hydrolysis of Swim Bladders. Bioresources 2018, 13, 3275–3283. [Google Scholar] [CrossRef]
- Timoshenko, S. Analysis of Bi-Metal Thermostats. J. Opt. Soc. Am. 1925, 11, 233–255. [Google Scholar] [CrossRef]
- Le Duigou, A.; Keryvin, V.; Beaugrand, J.; Pernes, M.; Scarpa, F.; Castro, M. Humidity responsive actuation of bioinspired hygromorph biocomposites (HBC) for adaptive structures. Compos. Appl. Sci. Manuf. 2019, 116, 36–45. [Google Scholar] [CrossRef]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Pan, L.; Liu, D.; Tao, Y.; Shi, S.Q. A Bio-Hygromorph Fabricated with Fish Swim Bladder Hydrogel and Wood Flour-Filled Polylactic Acid Scaffold by 3D Printing. Materials 2019, 12, 2896. https://doi.org/10.3390/ma12182896
Li P, Pan L, Liu D, Tao Y, Shi SQ. A Bio-Hygromorph Fabricated with Fish Swim Bladder Hydrogel and Wood Flour-Filled Polylactic Acid Scaffold by 3D Printing. Materials. 2019; 12(18):2896. https://doi.org/10.3390/ma12182896
Chicago/Turabian StyleLi, Peng, Ling Pan, Dexi Liu, Yubo Tao, and Sheldon Q. Shi. 2019. "A Bio-Hygromorph Fabricated with Fish Swim Bladder Hydrogel and Wood Flour-Filled Polylactic Acid Scaffold by 3D Printing" Materials 12, no. 18: 2896. https://doi.org/10.3390/ma12182896
APA StyleLi, P., Pan, L., Liu, D., Tao, Y., & Shi, S. Q. (2019). A Bio-Hygromorph Fabricated with Fish Swim Bladder Hydrogel and Wood Flour-Filled Polylactic Acid Scaffold by 3D Printing. Materials, 12(18), 2896. https://doi.org/10.3390/ma12182896