Optimization Design by Genetic Algorithm Controller for Trajectory Control of a 3-RRR Parallel Robot

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Model of the Planar 3-RRR Parallel Robot
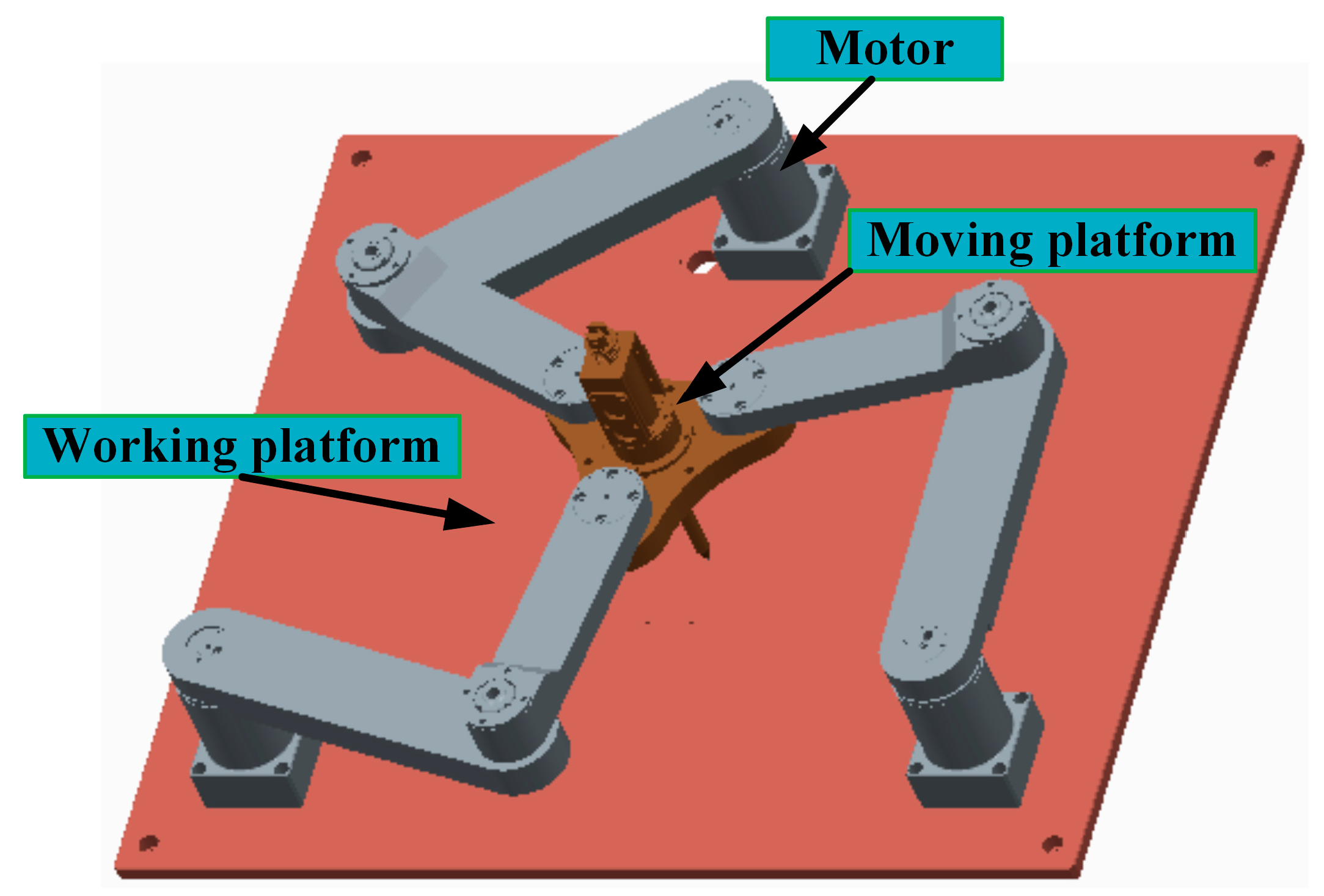
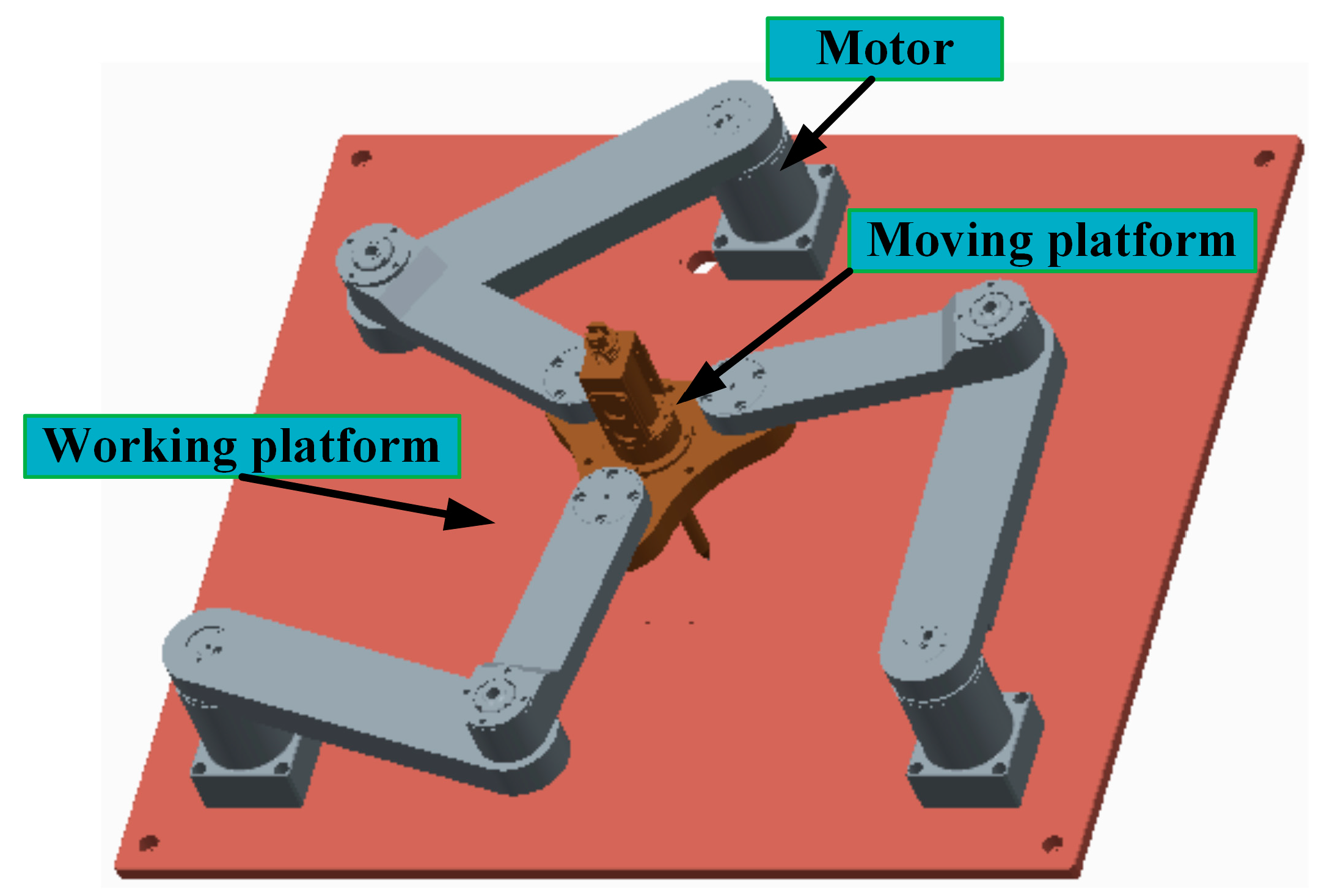
2.1. The Structure of the 3-RRR Planar Parallel Robot
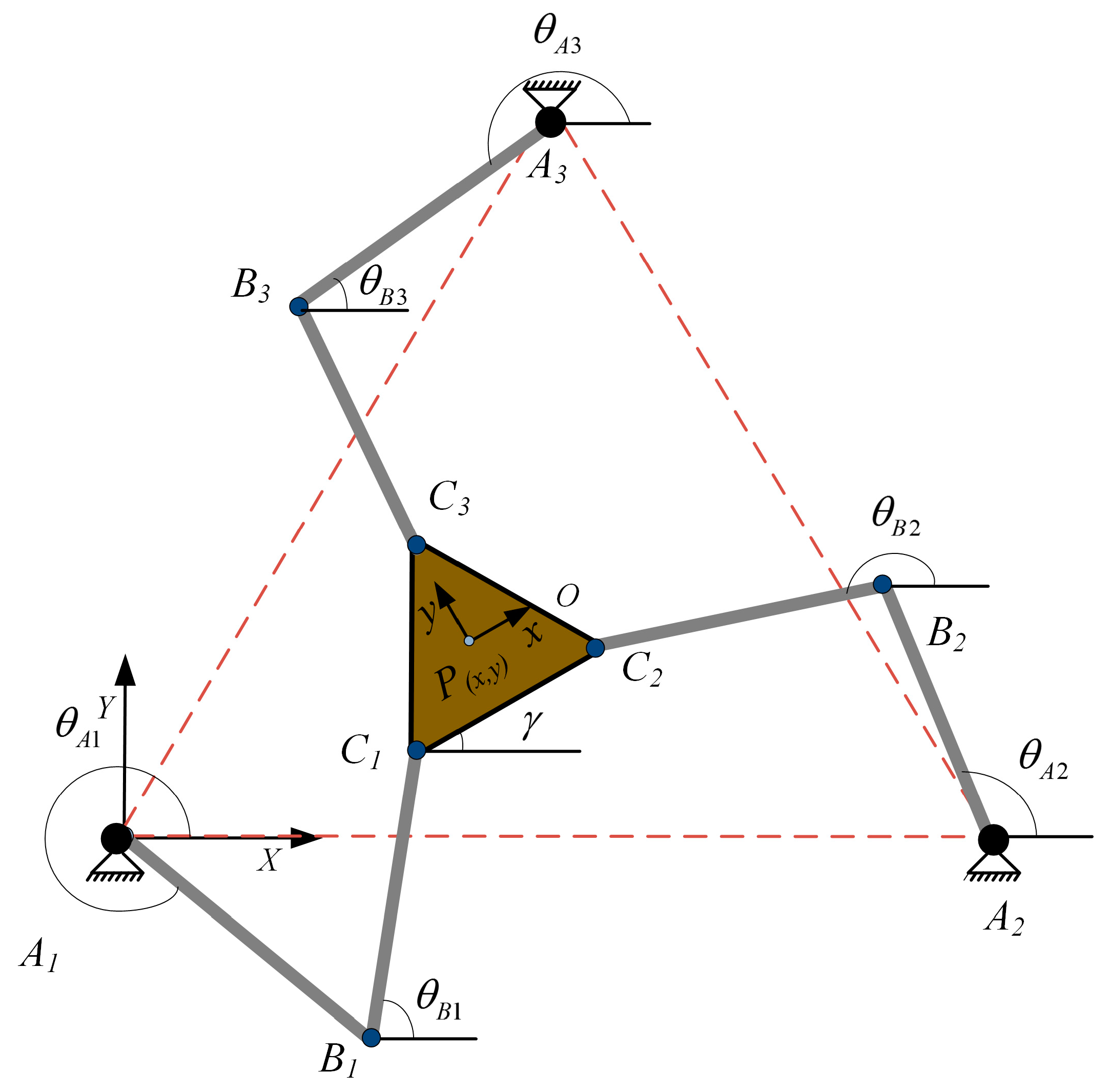
2.2. The Kinematic Model of the 3-RRR Planar Parallel Robot
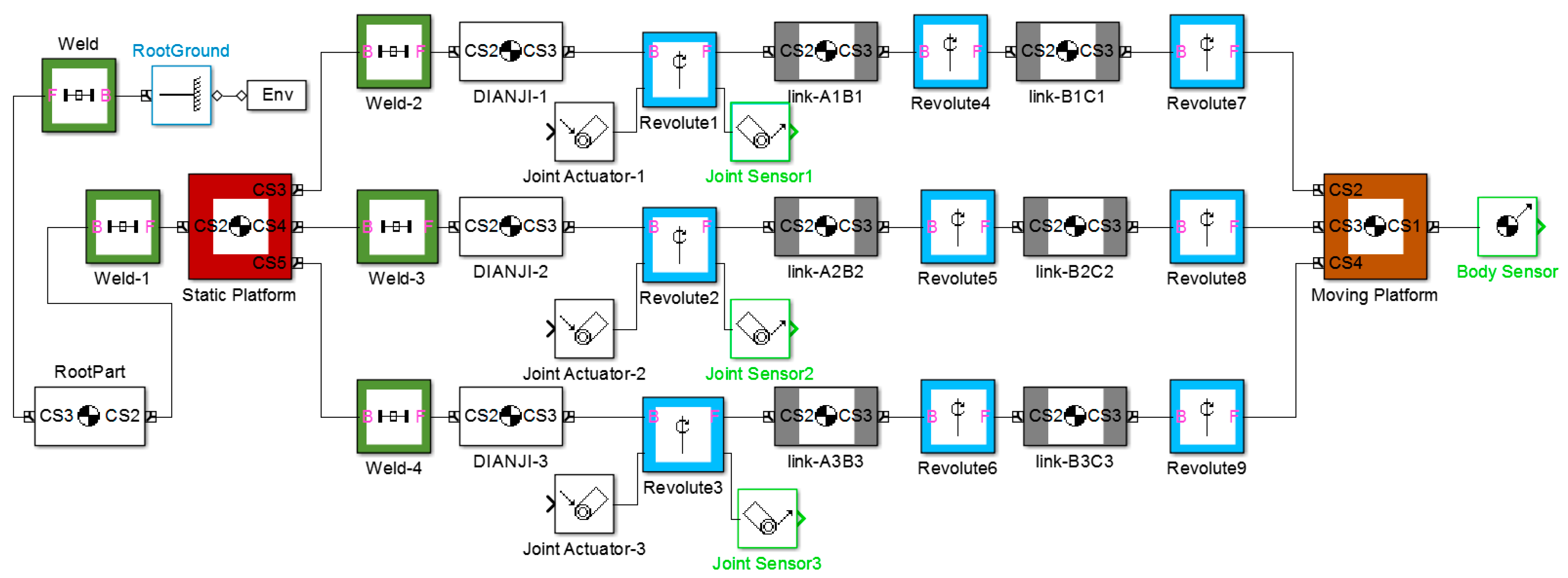
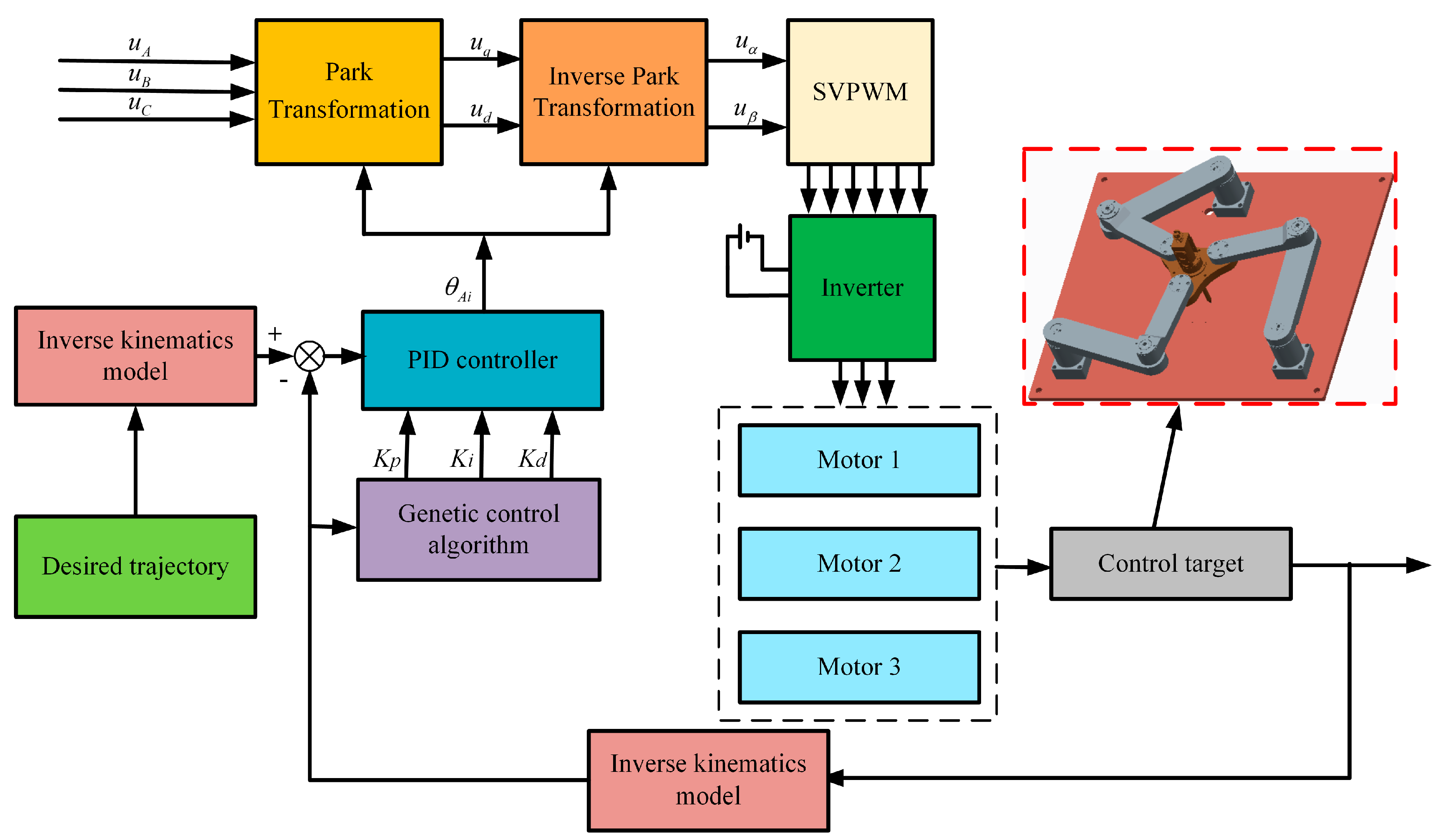
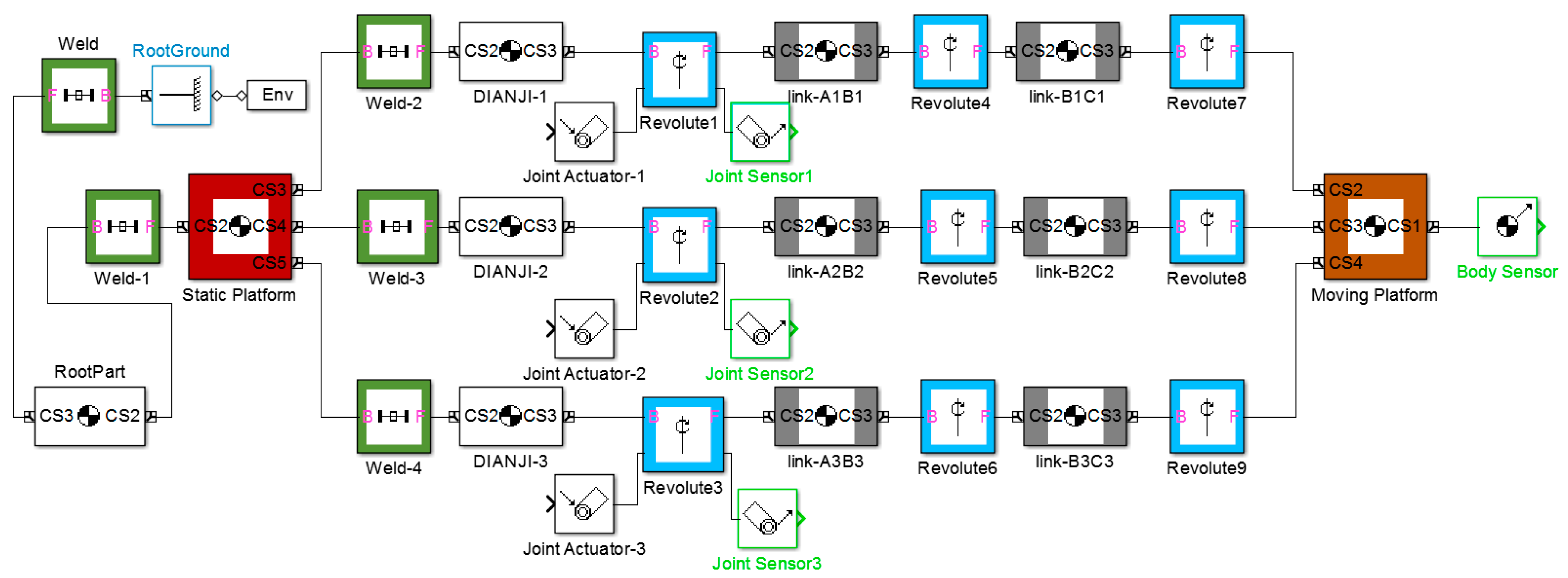
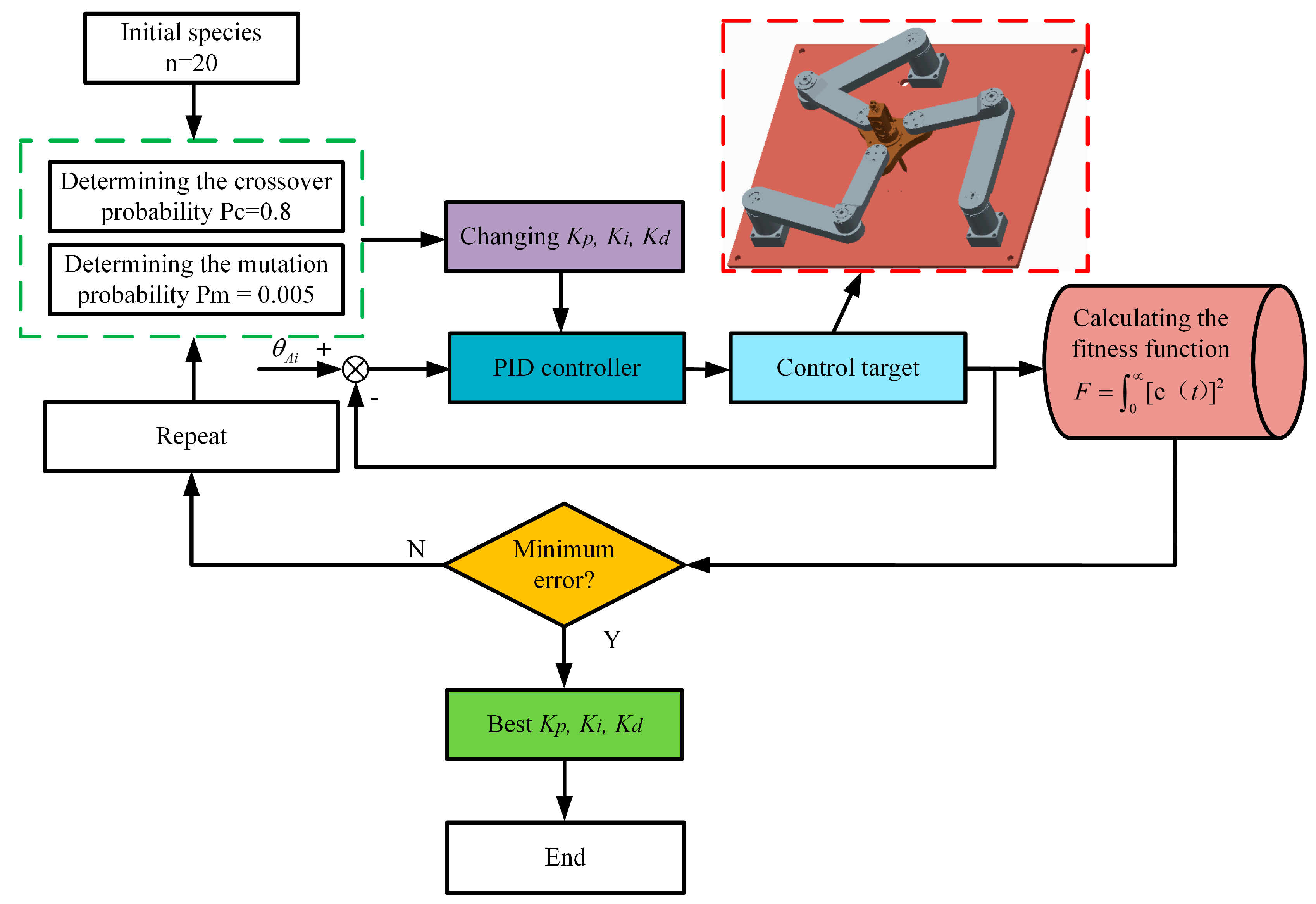
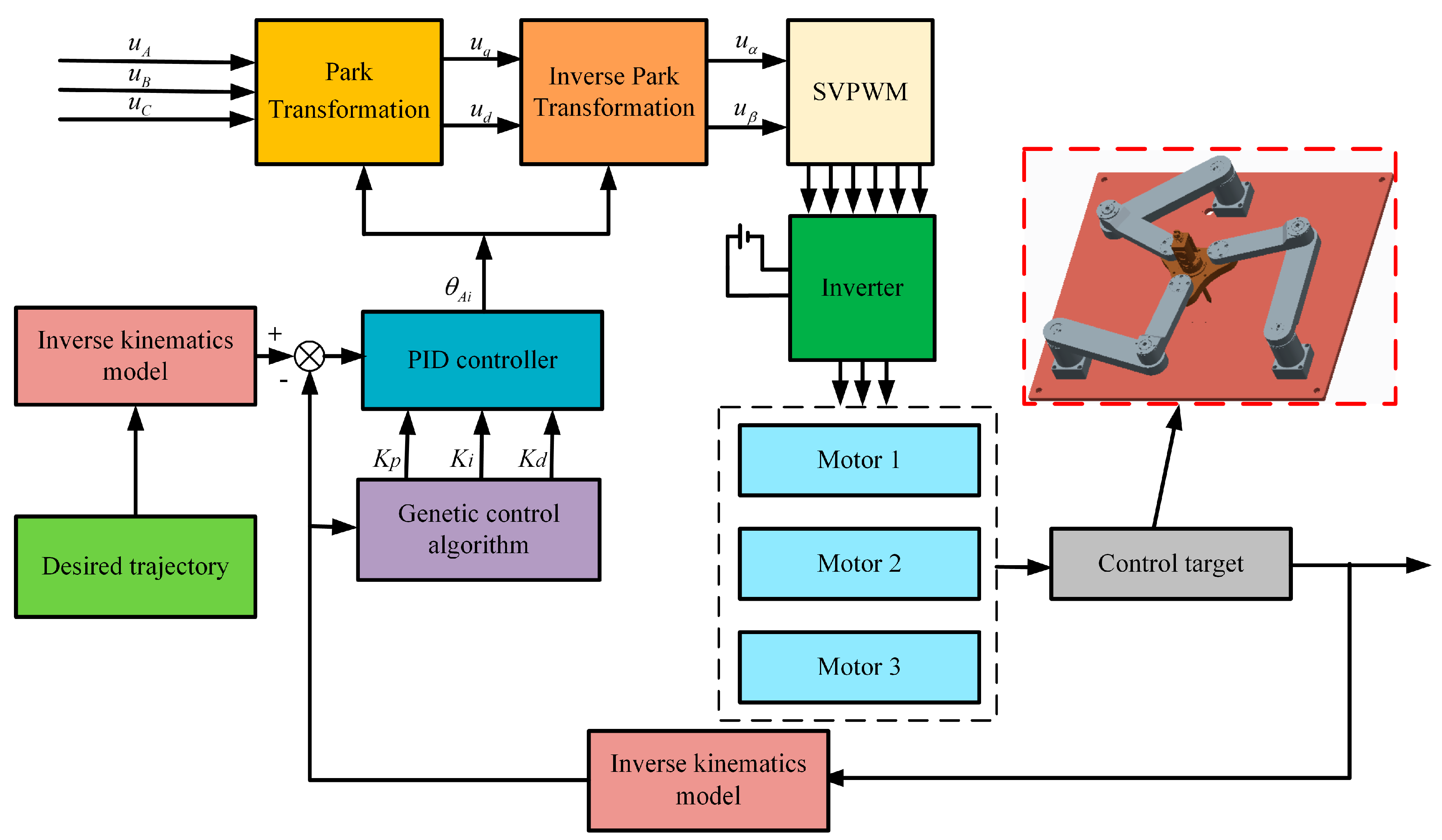
3. Virtual Bench Setup and Genetic Algorithm Controller
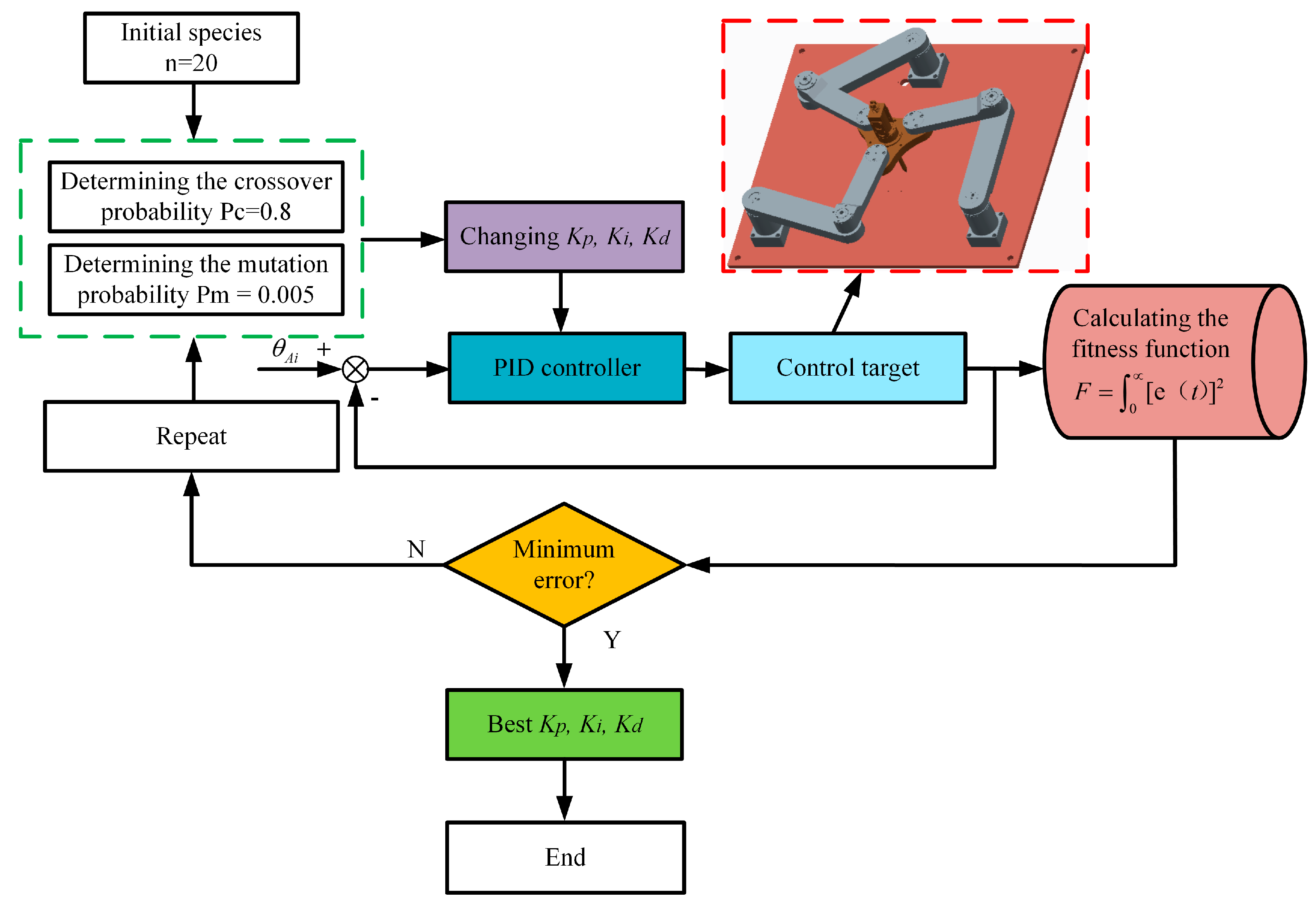
- Step 1:
- Parameter encoding: Due to the need-tuning parameters in the real domain, the simple binary encoding and encoder, six sub-strings can be used as the six parameters influencing each other. They then formed a chromosome. The precision of the PID solution parameters is set to 4 digits after the decimal point, and the solution space of the PID parameters can be divided into (1000 − 0) × (104) = 10,000,000 points. Because 223 < 10,000,000 < 224, 24-bit binary numbers are needed to represent these solutions. In other words, a solution code is a 24-bit binary string. Initially, these binary strings are randomly generated. One such binary string represents a chromosome string where the length of the chromosome string is 24.
- Step 2:
- The fitness function is the basis for evaluating the selection, where the error integral can be used as the performance of the system, such as Integrator Error (IE), Integrator Absolute Error (IAE), Integral Square Error (ISE), Integration Time and Absolute Error (ITAE), etc. Each formula has its own focus. This paper wants to achieve a smaller dynamic error, so the integral square error is used as the fitness function:
- Step 3:
- Genetic algorithm parameters: Group size n = 20, Crossover probability Pc = 0.8, Mutation probability Pm = 0.005.
- Step 4:
- If the error is minimum, then running is stopped, as the output has reached the optimal parameters. Otherwise, Steps 1 to 3 are repeated.
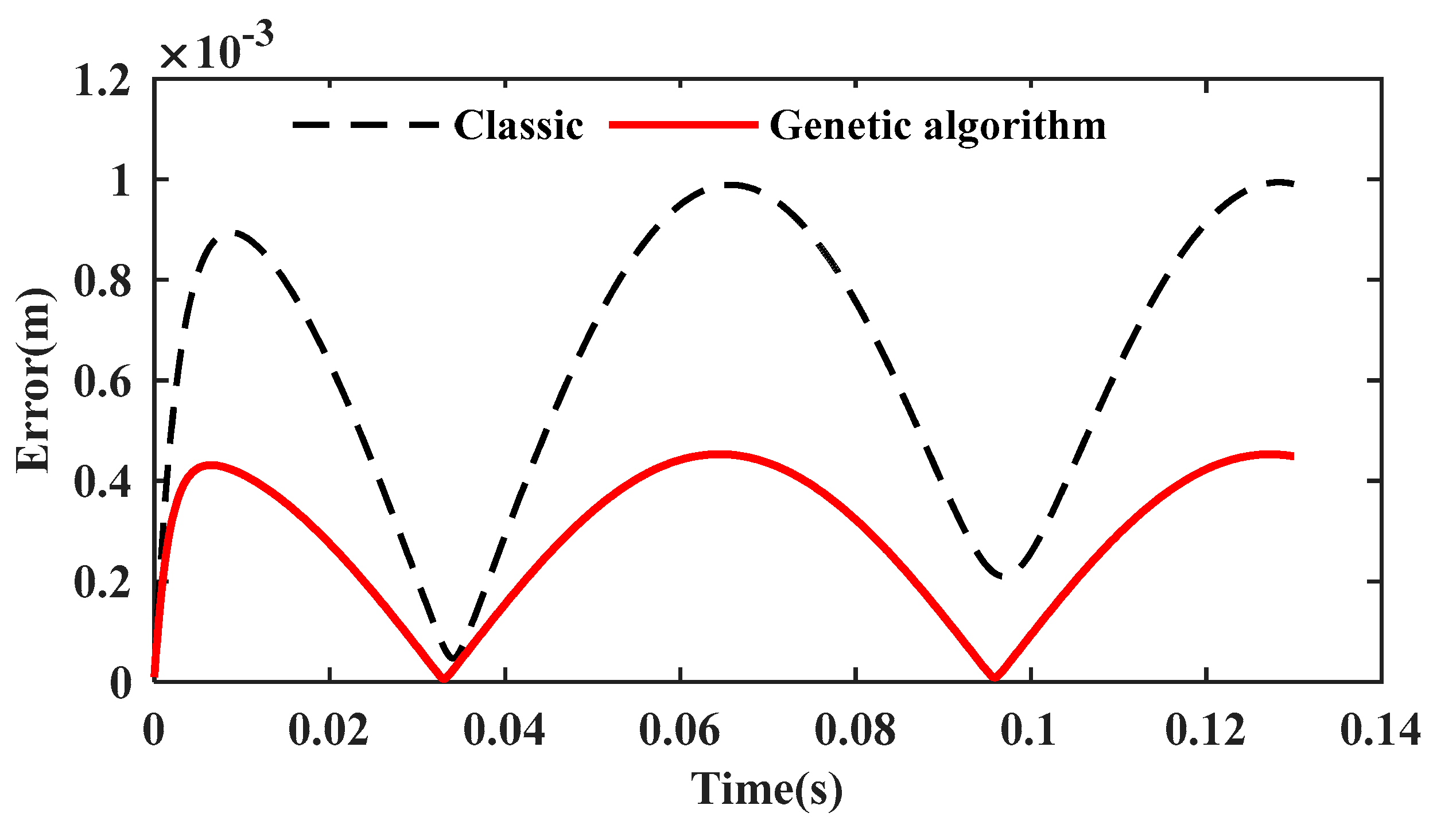
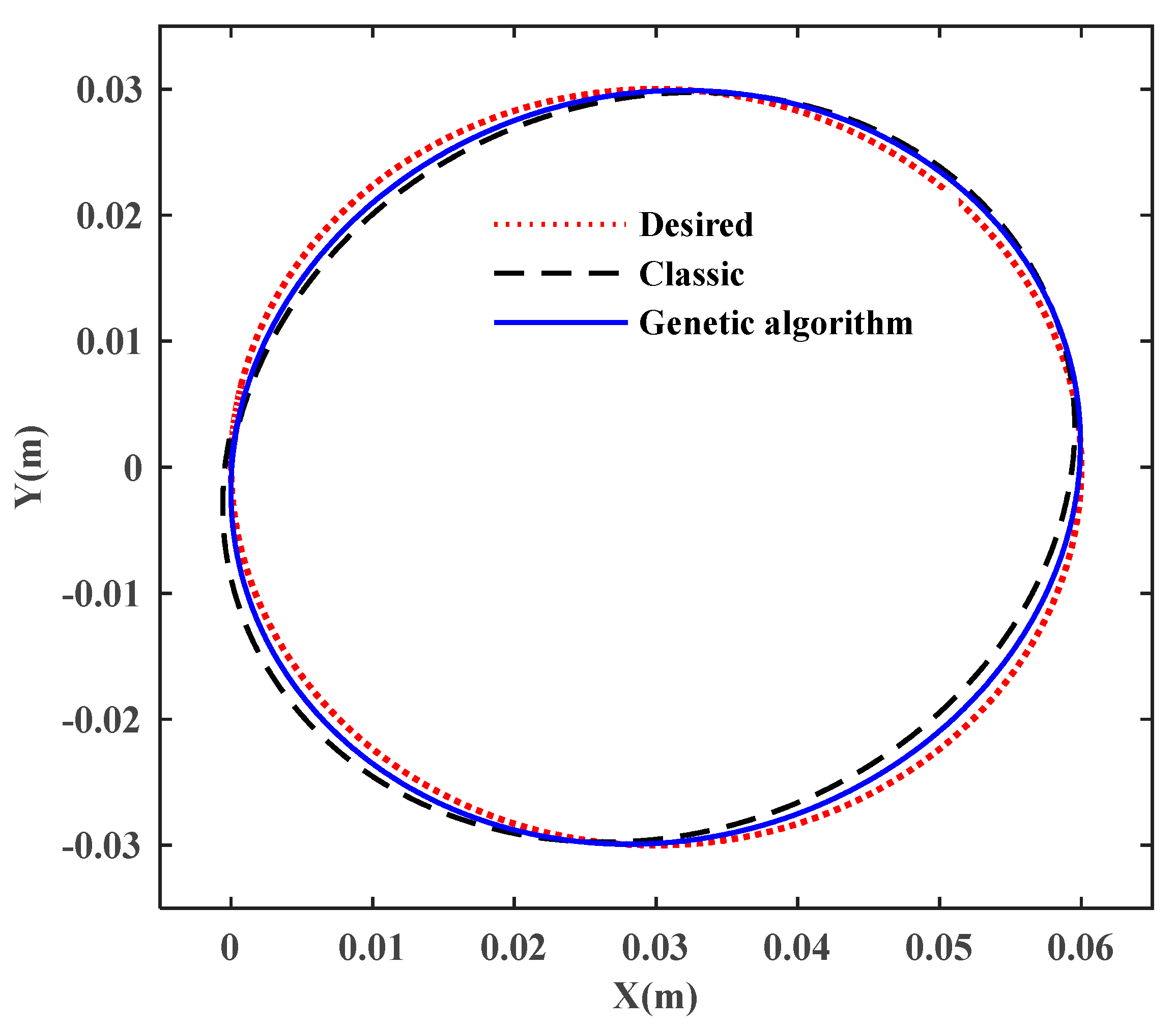
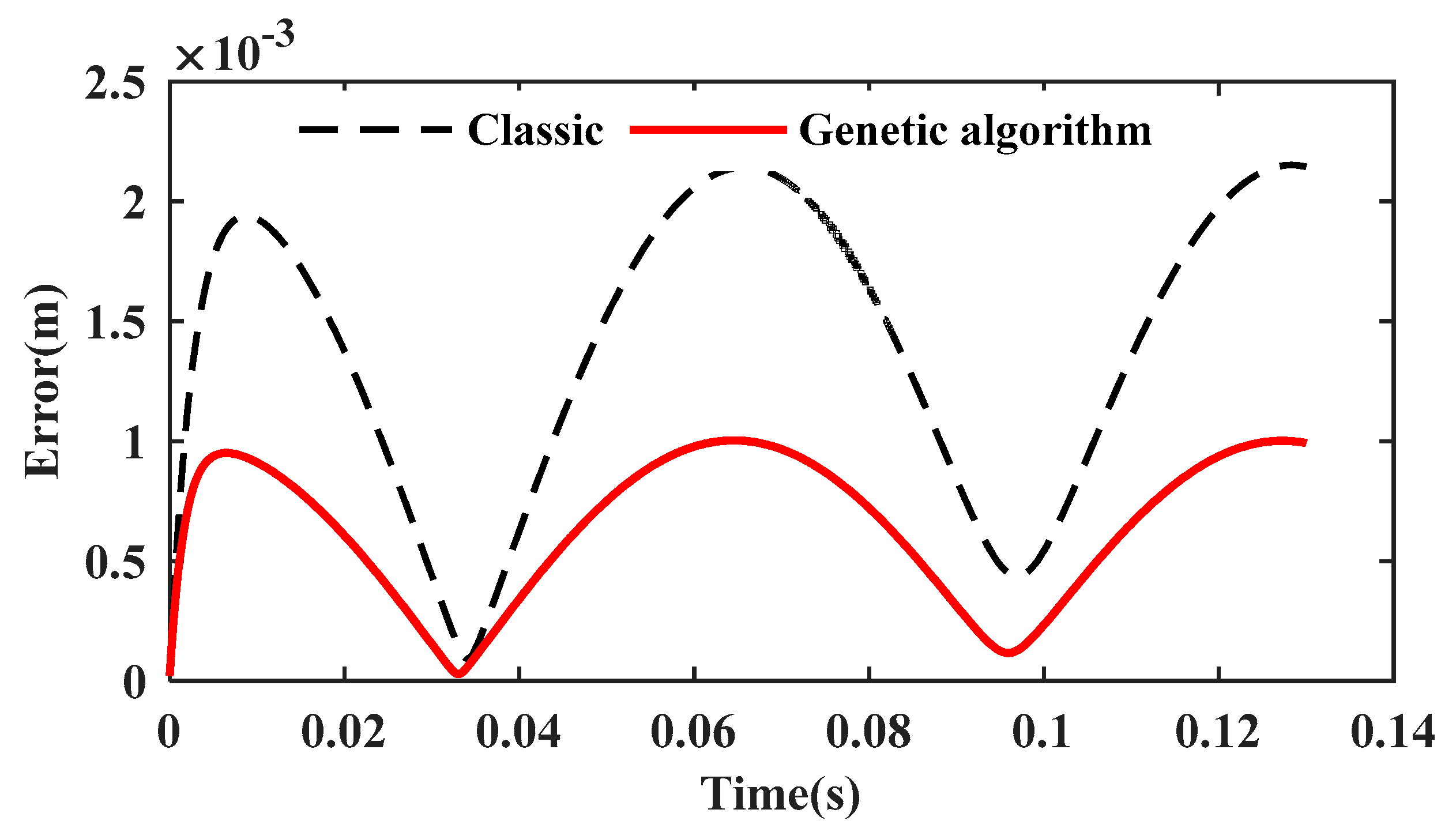
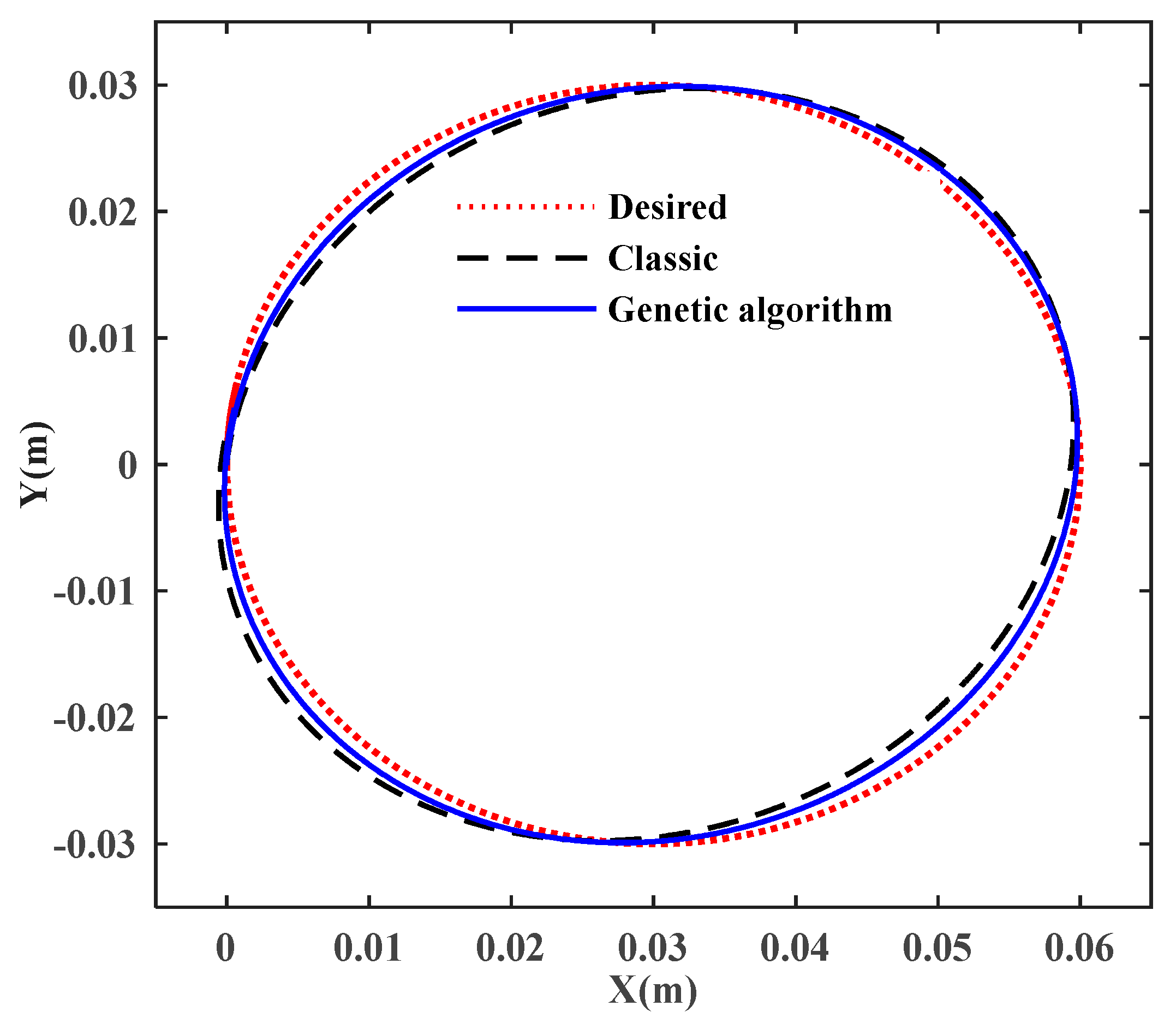
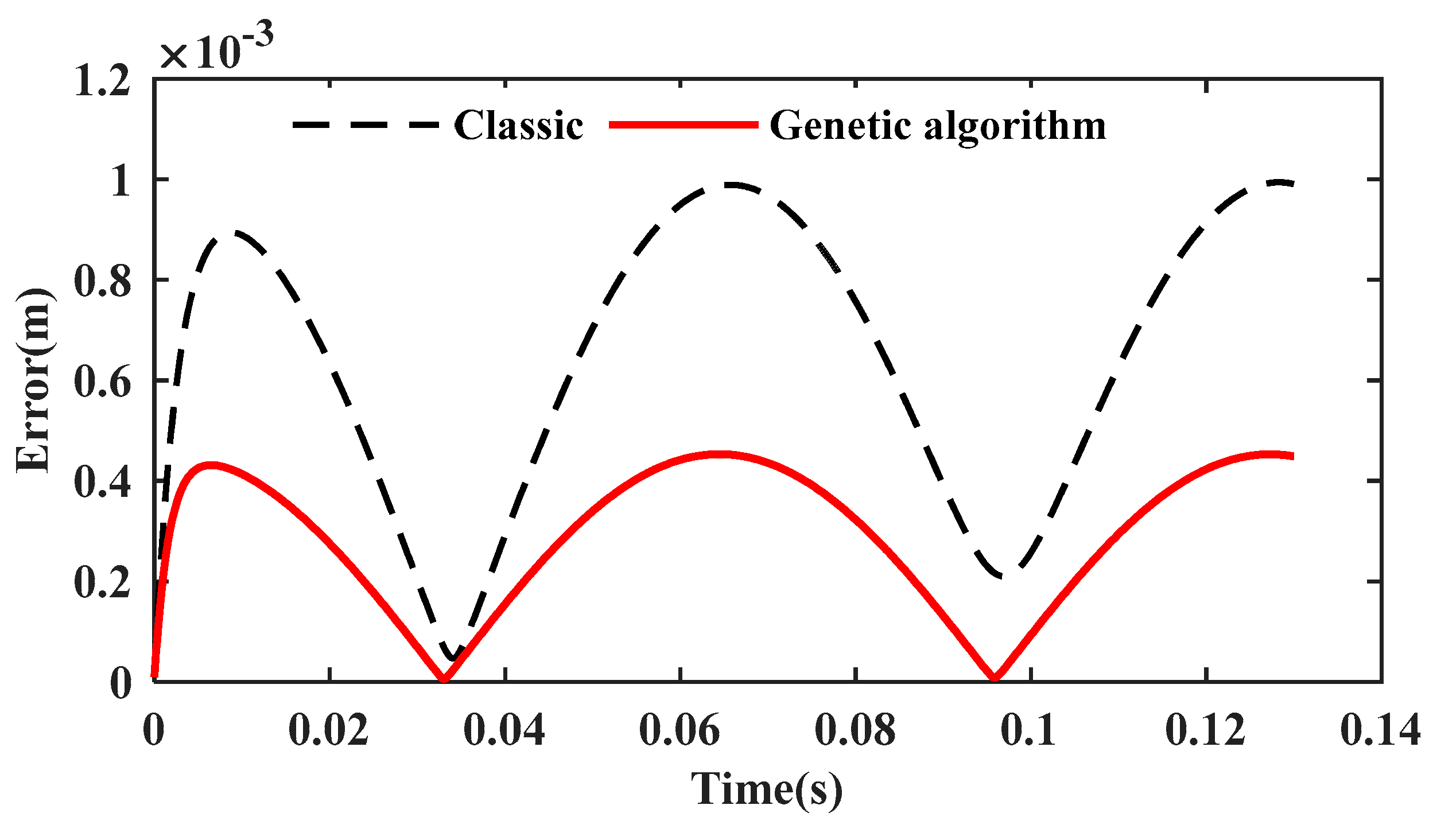
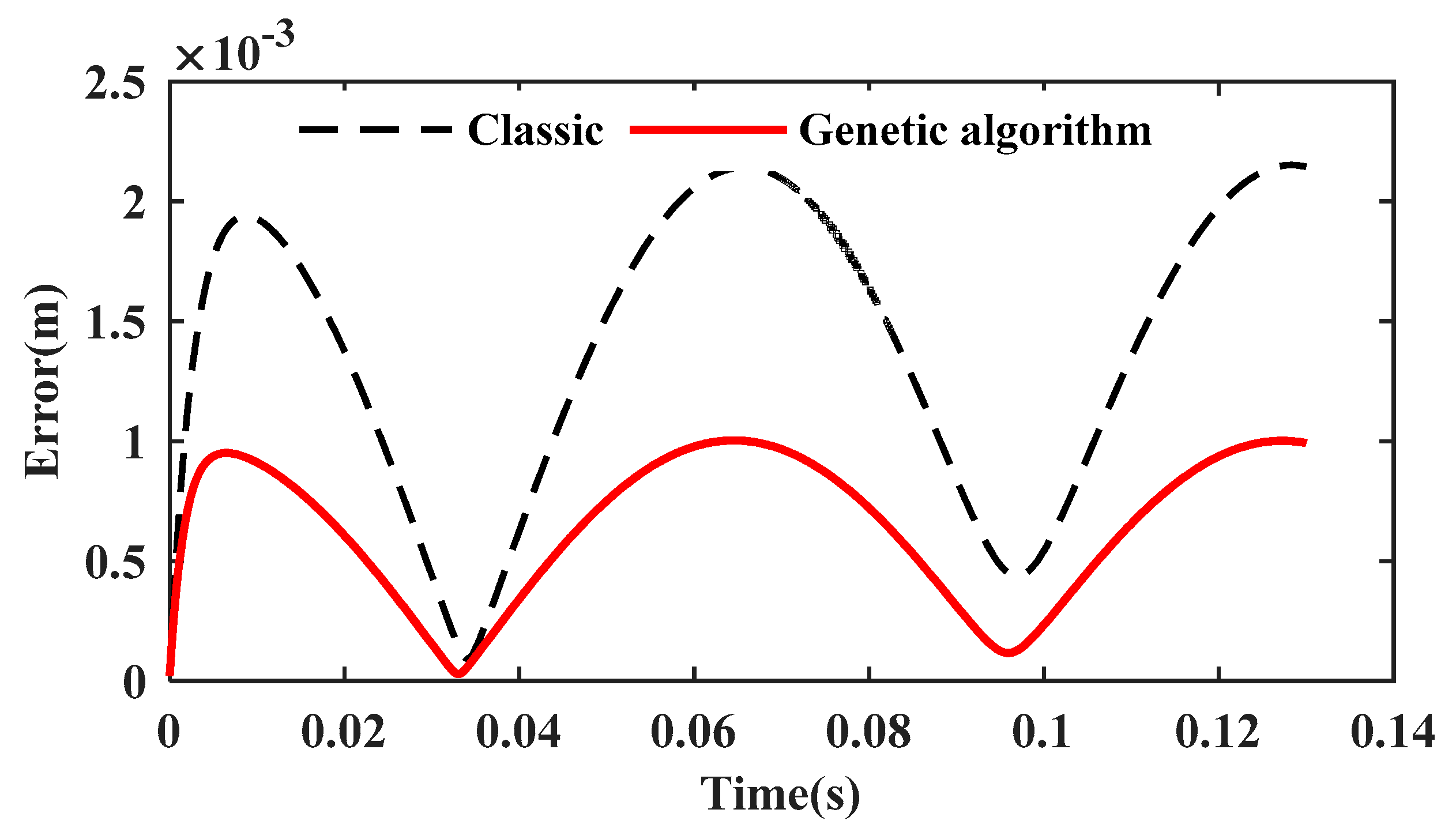
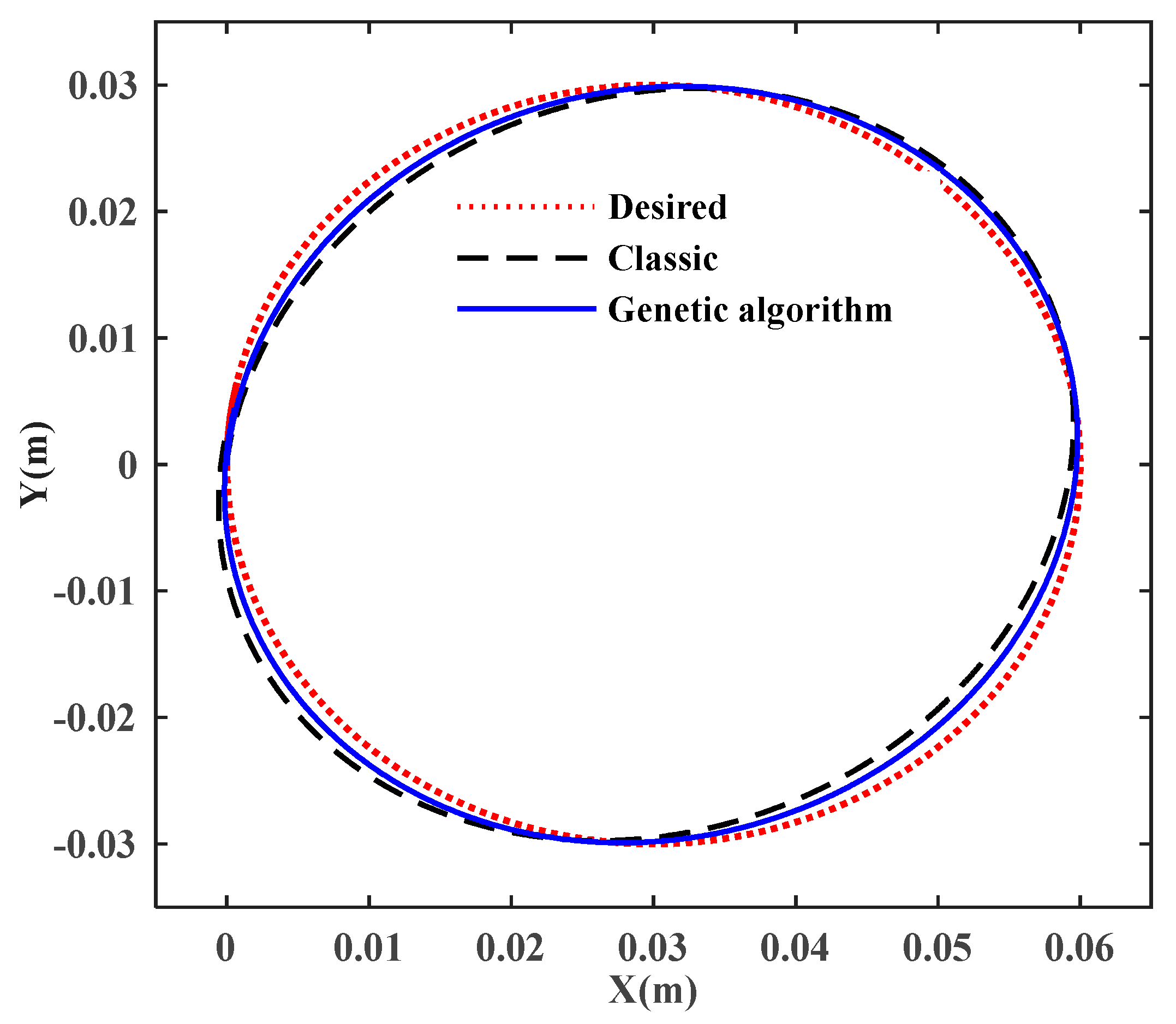
4. Simulation and Results Discussion
- xd is the x coordinate of the desired trajectory.
- yd is the y coordinate of the desired trajectory.
- xp is the x coordinate of the trajectory obtained by the classic PID controller.
- yp is the y coordinate of the trajectory obtained by the classic PID controller.
- xg is the x coordinate of the trajectory obtained by the PID controller optimized by a genetic algorithm.
- yg is the y coordinate of the trajectory obtained by the PID controller optimized by a genetic algorithm.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Merlet, J.P. Parallel Robots; Kluwer Academic Publishers: Norwell, MA, USA, 2000. [Google Scholar]
- Salas, F.G.; Santibáñez, V.; Llama, M.A. Fuzzy-Tuned PD Tracking Control of a 3-RRR Parallel Manipulator: Stability Analysis and Simulations. Intell. Autom. Soft Comput. 2014, 20, 159–182. [Google Scholar] [CrossRef]
- Fichter, E.F. A Stewart Platform-Based Manipulator: General Theory and Practical Construction. Int. J. Robot Res. 1986, 5, 157–182. [Google Scholar] [CrossRef]
- Lee, K.M.; Yien, C. Design and control of a prototype platform manipulator for work holding and work handling applications. J. Mech. Work. Technol. 1989, 20, 305–314. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, X. Parameters optimization and experiment of a planar parallel 3-dof nanopositioning system. IEEE Trans. Ind. Electron. 2017, 99, 2388–2396. [Google Scholar] [CrossRef]
- Gutierrez, M.N.C. Dimensional synthesis of 3rrr planar parallel robots for well-conditioned workspace. IEEE Lat. Am. Trans. 2015, 13, 409–415. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. The optimum kinematic design of a planar three-degree-of-freedom parallel manipulator. J. Mech. Trans. Autom. Design 1988, 110, 35–41. [Google Scholar] [CrossRef]
- Kucuk, S. Energy minimization for 3-rrr fully planar parallel manipulator using particle swarm optimization. Mech. Mach. Theory 2013, 62, 129–149. [Google Scholar] [CrossRef]
- Varedi-Koulaei, S.M.; Daniali, H.M.; Farajtabar, M.; Fathi, B.; Shafiee-Ashtiani, M. Reducing the undesirable effects of joints clearance on the behavior of the planar 3-rrr parallel manipulators. Nonlinear Dyn. 2016, 86, 1–16. [Google Scholar] [CrossRef]
- Firmani, F.; Podhorodeski, R.P. Singularity analysis of planar parallel manipulators based on forward kinematic solutions. Mech. Mach. Theory 2009, 44, 1386–1399. [Google Scholar] [CrossRef]
- Kroger, R.; Binder, S. Accuracy analysis of 3-dof planar parallel robots. Mech. Mach. Theory 2008, 43, 445–458. [Google Scholar]
- Gao, M.W. Design, Analysis and Control on the Planar Parallel Robot. Master’s Thesis, South China University of Technology, Guangzhou, China, 2012. [Google Scholar]
- Zhang, Q.; Fan, X.; Zhang, X. Dynamic analysis of planar 3-rrr flexible parallel robots with dynamic stiffening. Shock Vib. 2014, 1, 154–159. [Google Scholar] [CrossRef]
- Yu, Y.Q.; Du, Z.C.; Yang, J.X.; Li, Y. An experimental study on the dynamics of a 3-rrr flexible parallel robot. IEEE Trans. Robot. 2011, 27, 992–997. [Google Scholar] [CrossRef]
- Moezi, S.A.; Rafeeyan, M.; Zakeri, E.; Zare, A. Simulation and experimental control of a 3-rpr parallel robot using optimal fuzzy controller and fast on/off solenoid valves based on the pwm wave. ISA Trans. 2016, 61, 265. [Google Scholar] [CrossRef] [PubMed]
- Shang, C.; Tao, G.; Meng, D. Adaptive robust trajectory tracking control of a parallel manipulator driven by pneumatic cylinders. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef]
- Abu-Dakka, F.J.; Assad, I.F.; Alkhdour, R.M.; Abderahim, M. Statistical evaluation of an evolutionary algorithm for minimum time trajectory planning problem for industrial robots. Int. J. Adv. Manuf. Technol. 2017, 89, 389–406. [Google Scholar] [CrossRef]
- Stan, S.D.; Gogu, G.; Manic, M.; Balan, R.; Rad, C. Fuzzy Control of a 3 Degree of Freedom Parallel Robot. In Technological Developments in Education and Automation; Springer: Dordrecht, The Netherlands, 2010; pp. 437–442. [Google Scholar]
- Noshadi, A.; Mailah, M.; Zolfagharian, A. Active force control of 3-RRR planar parallel manipulator. In Proceedings of the IEEE International Conference on Mechanical and Electrical Technology, Singapore, 10–12 September 2010; pp. 77–81. [Google Scholar]
- Noshadi, A.; Mailah, M.; Zolfagharian, A. Intelligent active force control of a 3-rrr parallel manipulator incorporating fuzzy resolved acceleration control. Appl. Math. Model. 2012, 36, 2370–2383. [Google Scholar] [CrossRef]
- Pham, C.V.; Wang, Y.N. Robust adaptive trajectory tracking sliding mode control based on neural networks for cleaning and detecting robot manipulators. J. Intell. Robot. Syst. 2015, 79, 101–114. [Google Scholar] [CrossRef]
- Kuo, Y.L.; Lin, T.P.; Wu, C.Y. Experimental and numerical study on the semi-closed loop control of a planar parallel robot manipulator. Math. Probl. Eng. 2014, 5, 1–9. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Sheng, L. A new genetic algorithm approach to smooth path planning for mobile robots. Assem. Autom. 2016, 36, 138–145. [Google Scholar] [CrossRef]
- Wang, X.; Shi, Y.; Ding, D.; Gu, X. Double global optimum genetic algorithm–particle swarm optimization-based welding robot path planning. Eng. Optim. 2016, 48, 299–316. [Google Scholar] [CrossRef]
- Lu, X.; Liu, M. Optimal design and tuning of pid-type interval type-2 fuzzy logic controllers for delta parallel robots. Int. J. Adv. Robot Syst. 2016, 13, 96. [Google Scholar] [CrossRef]
- Lu, X.G.; Liu, M.; Liu, J.X. Design and optimization of interval type-2 fuzzy logic controller for delta parallel robot trajectory control. Int. J. Fuzzy Syst. 2017, 19, 190–206. [Google Scholar] [CrossRef]
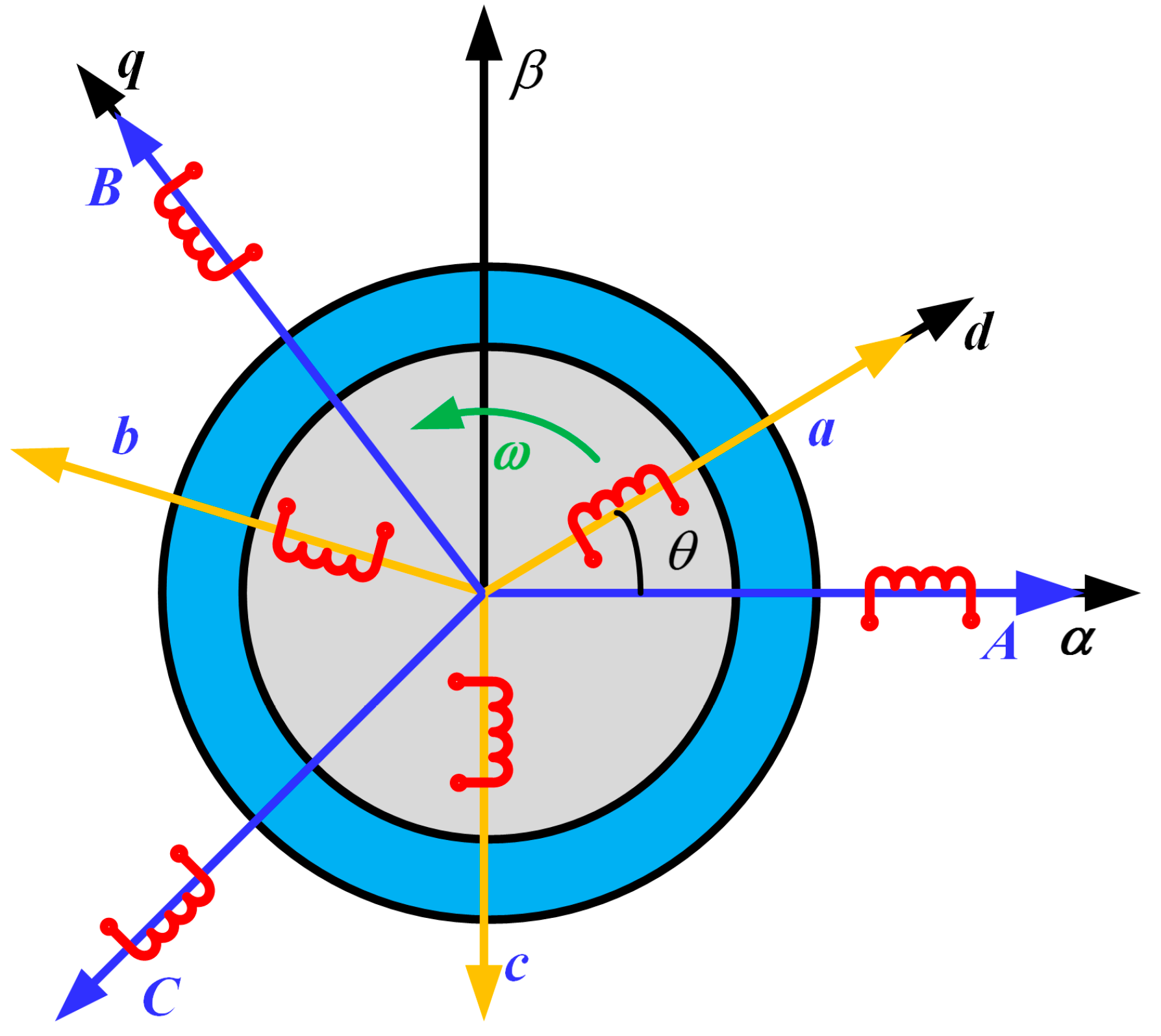
- Yuan, L. Modern Permanent Magnet Synchronous Motor Control Theory and MATLAB Simulation; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2016. [Google Scholar]


© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheng, L.; Li, W. Optimization Design by Genetic Algorithm Controller for Trajectory Control of a 3-RRR Parallel Robot. Algorithms 2018, 11, 7. https://doi.org/10.3390/a11010007
Sheng L, Li W. Optimization Design by Genetic Algorithm Controller for Trajectory Control of a 3-RRR Parallel Robot. Algorithms. 2018; 11(1):7. https://doi.org/10.3390/a11010007
Chicago/Turabian StyleSheng, Lianchao, and Wei Li. 2018. "Optimization Design by Genetic Algorithm Controller for Trajectory Control of a 3-RRR Parallel Robot" Algorithms 11, no. 1: 7. https://doi.org/10.3390/a11010007
APA StyleSheng, L., & Li, W. (2018). Optimization Design by Genetic Algorithm Controller for Trajectory Control of a 3-RRR Parallel Robot. Algorithms, 11(1), 7. https://doi.org/10.3390/a11010007