
Accuracy of Photogrammetric UAV-Based Point Clouds under Conditions of Partially-Open Forest Canopy


Abstract
:1. Introduction
2. Materials and Methods
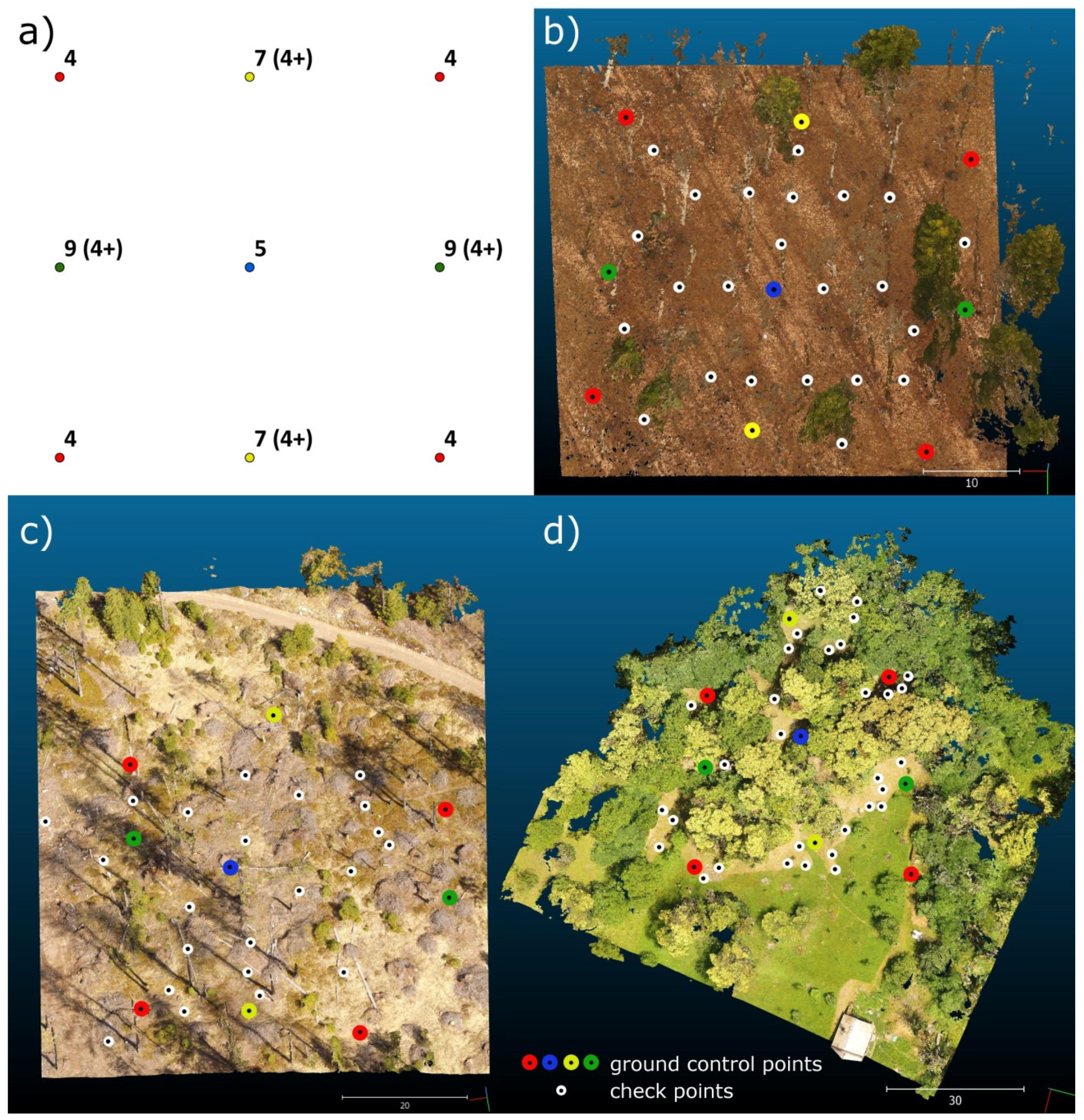
2.1. Study Sites and Reference Measurements
2.2. UAV Imagery Acquisition and Processing
2.3. Statistical and Spatial Analysis
3. Results
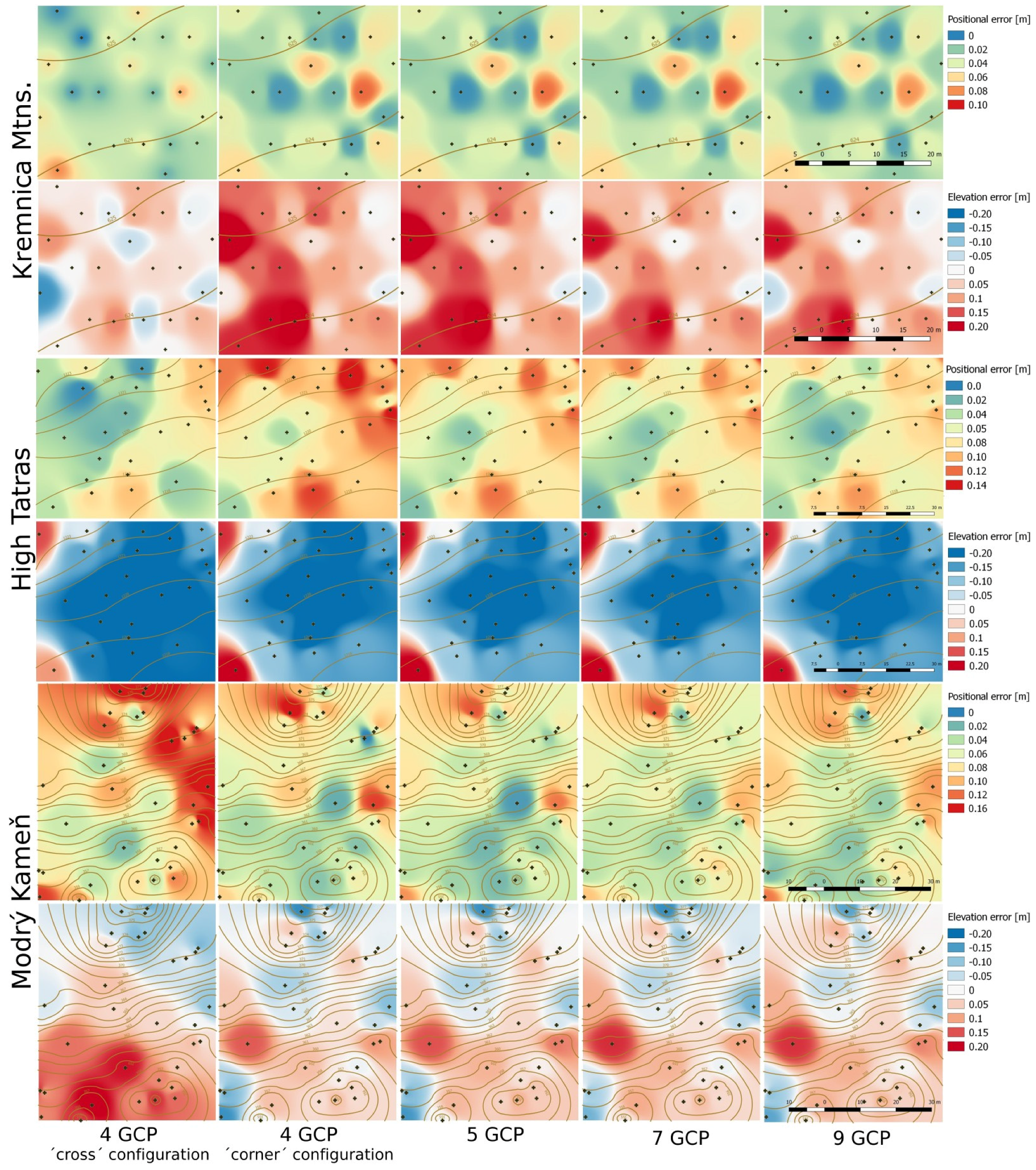
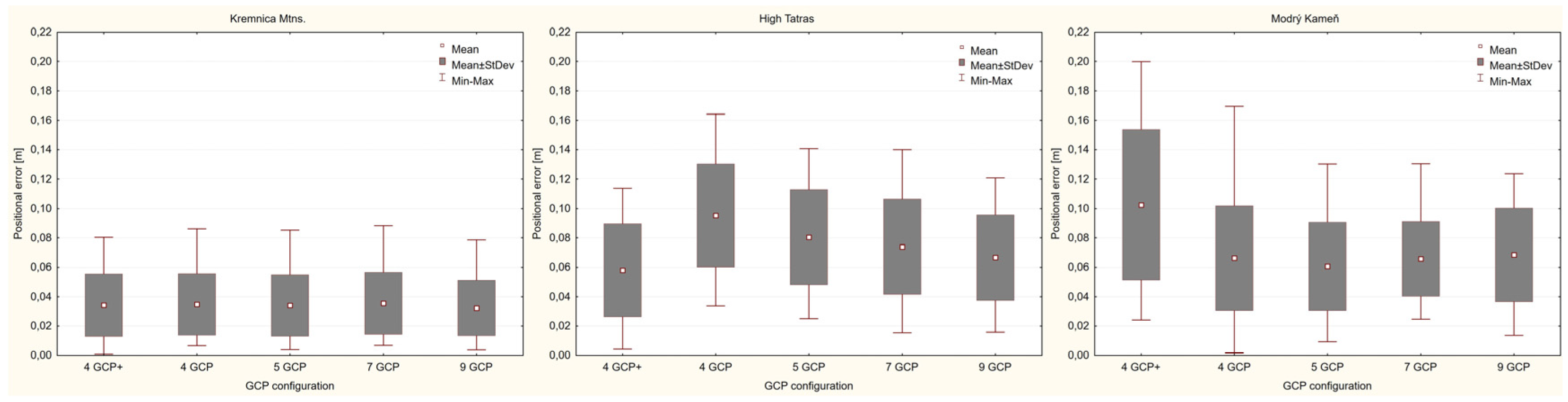
3.1. Horizontal Accuracy
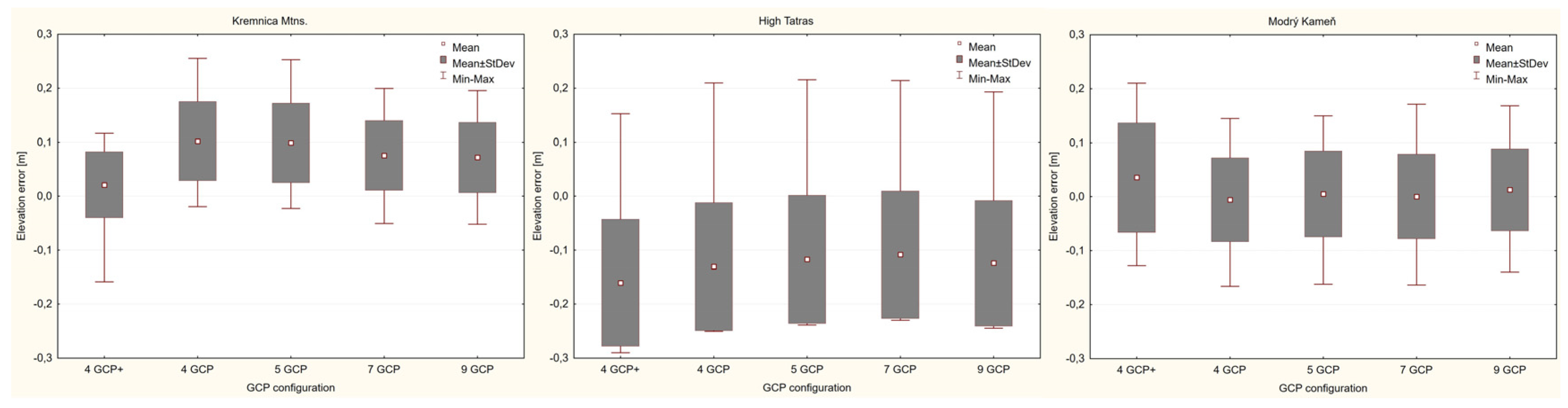
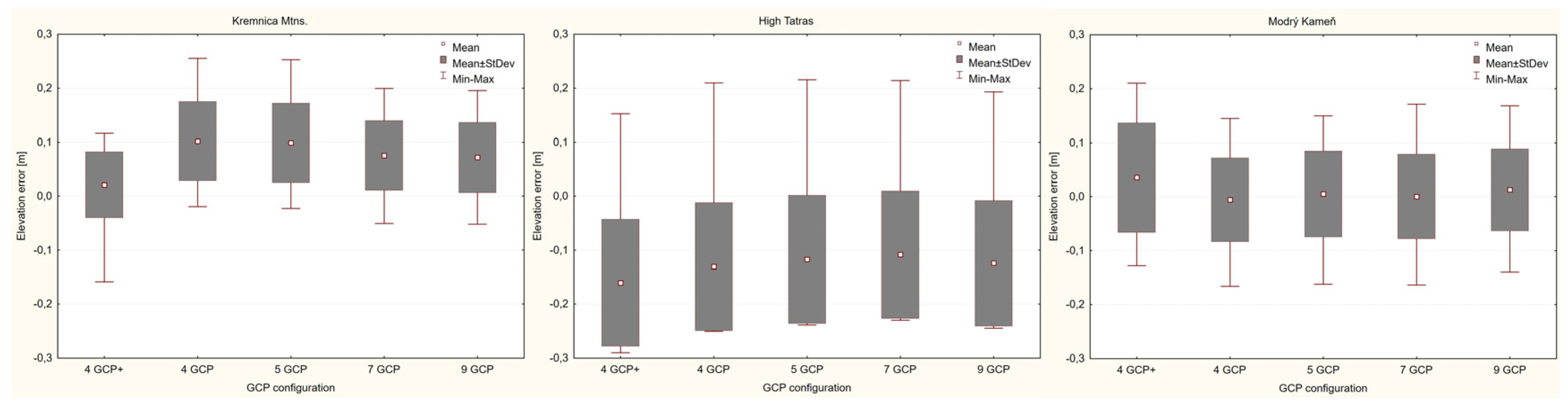
3.2. Vertical Accuracy
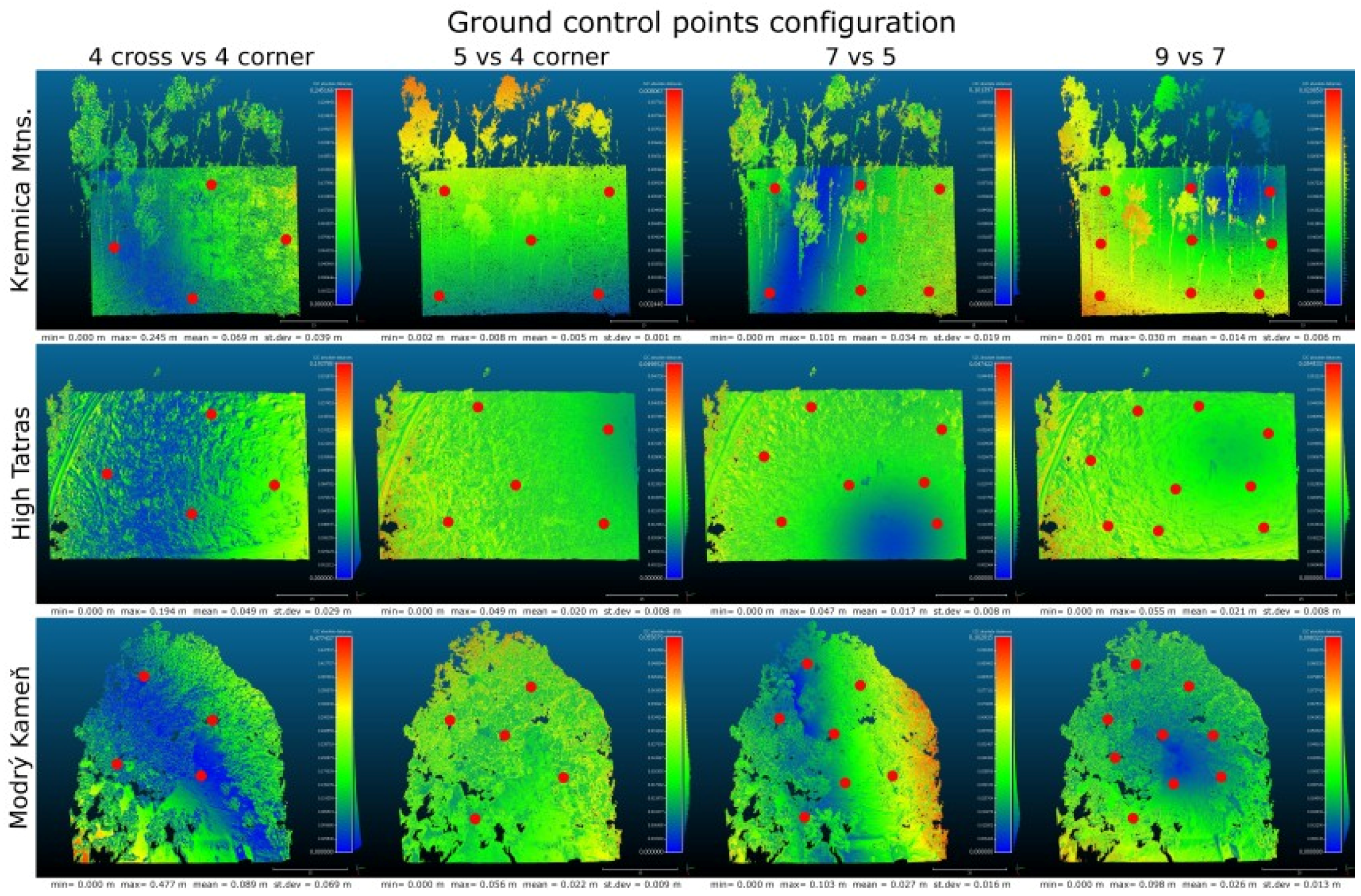
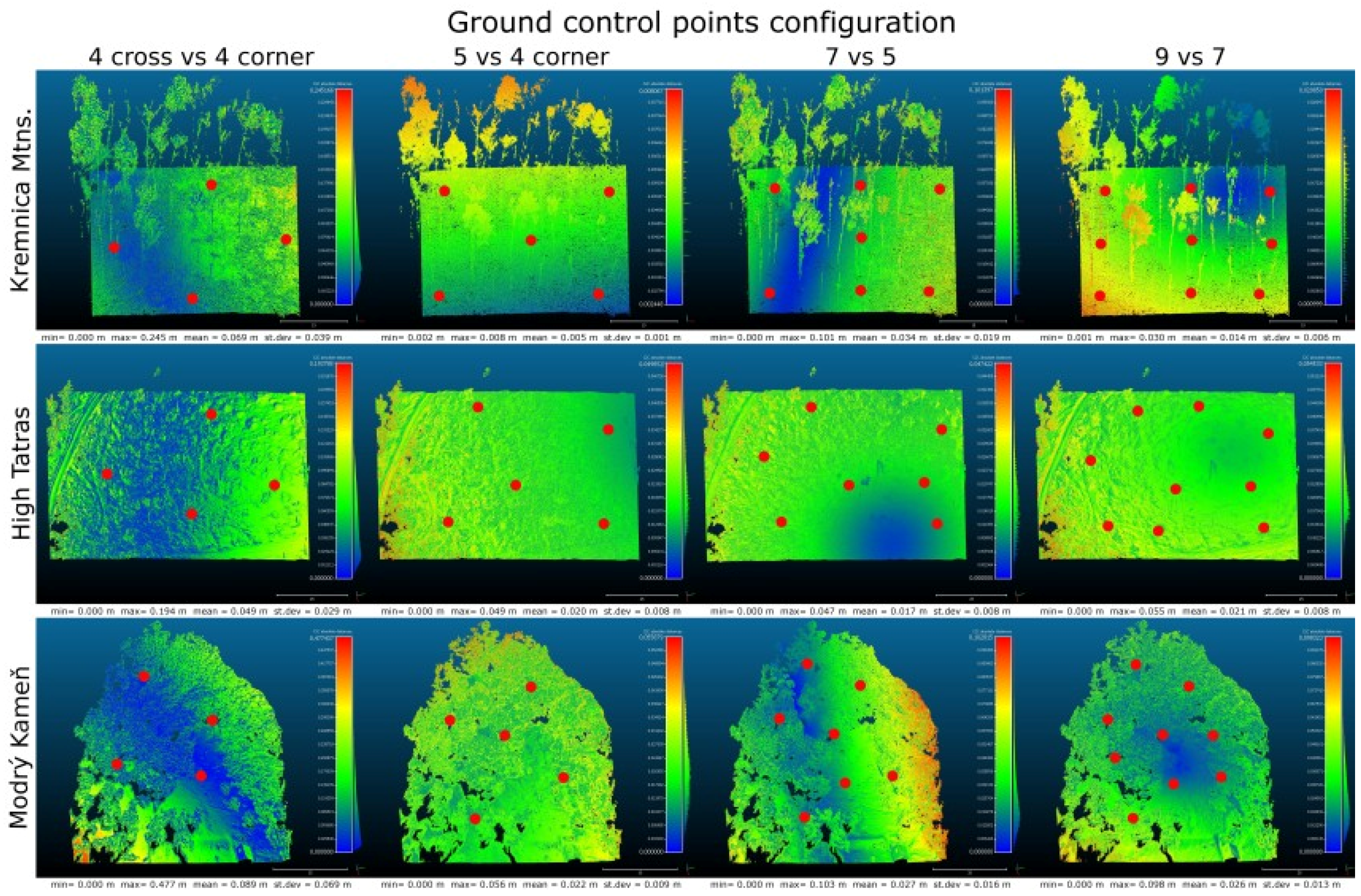
3.3. Overall Changes of Point Clouds
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Torresan, C.; Berton, A.; Carotenuto, F.; Di, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2016, 38, 2427–2447. [Google Scholar]
- Mikita, T.; Janata, P.; Surový, P. Forest stand inventory based on combined aerial and terrestrial close-range photogrammetry. Forests 2016, 7, 165. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, J.; Lian, J.; Fan, Z.; Ouyang, X.; Ye, W. Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biol. Conserv. 2016, 198, 60–69. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Sarmento, A.; Silva, J.; Nunes, A.; Correia, A.C.; Fontes, L.; Tomé, M.; Díaz-Varela, R. Using high resolution UAV imagery to estimate tree variables in Pinus pinea plantation in Portugal. For. Syst. 2016, 25, eSC09. [Google Scholar] [CrossRef]
- Puliti, S.; Olerka, H.; Gobakken, T.; Næsset, E. Inventory of Small Forest Areas Using an Unmanned Aerial System. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef]
- Wang, C.; Du, H.; Xu, X.; Han, N.; Zhou, G.; Sun, S.; Gao, G. Multi-scale crown closure retrieval for moso bamboo forest using multi-source remotely sensed imagery based on geometric-optical and Erf-BP neural network models. Int. J. Remote Sens. 2015, 36, 5384–5402. [Google Scholar] [CrossRef]
- Tuominen, S.; Balazs, A.; Saari, H.; Pölönen, I.; Sarkeala, J.; Viitala, R. Unmanned aerial system imagery and photogrammetric canopy height data in area-based estimation of forest variables. Silva Fenn. 2015, 49, 1348. [Google Scholar] [CrossRef]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using unmanned aerial vehicles (UAV) to quantify spatial gap patterns in forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef]
- Wallace, L.; Musk, R.; Lucieer, A. An assessment of the repeatability of automatic forest inventory metrics derived from UAV-borne laser scanning data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7160–7169. [Google Scholar] [CrossRef]
- Fritz, A.; Kattenborn, T.; Koch, B. UAV-Based Photogrammetric Point Clouds—Tree Stem Mapping in Open Stands in Comparison to Terrestrial Laser Scanner Point Clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 141–146. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Aicardi, I.; Garbarino, M.; Lingua, A.; Lingua, E.; Marzano, R.; Piras, M. Monitoring Post-Fire Forest Recovery Using Multi-Temporal Digital Surface Models Generated From. EARSeL eProceedings 2016, 15, 1–8. [Google Scholar]
- Merino, L.; Caballero, F.; Martínez-De-Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot. Syst. Theory Appl. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- De Dios, J.R.M.; Merino, L.; Caballero, F.; Ollero, A. Automatic forest-fire measuring using ground stations and unmanned aerial systems. Sensors 2011, 11, 6328–6353. [Google Scholar] [CrossRef] [PubMed]
- Lehmann, J.; Nieberding, F.; Prinz, T.; Knoth, C. Analysis of Unmanned Aerial System-Based CIR Images in Forestry—A New Perspective to Monitor Pest Infestation Levels. Forests 2015, 6, 594–612. [Google Scholar] [CrossRef]
- Smigaj, M.; Gaulton, R.; Barr, S.L.; Suárez, J.C. Uav-Borne Thermal Imaging for Forest Health Monitoring: Detection of Disease-Induced Canopy Temperature Increase. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-3/W3, 349–354. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based Photogrammetry and Hyperspectral Imaging for Mapping Bark Beetle Damage at Tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Lisein, J.; Michez, A.; Claessens, H.; Lejeune, P. Discrimination of Deciduous Tree Species from Time Series of Unmanned Aerial System Imagery. PLoS ONE 2015, 10, e0141006. [Google Scholar] [CrossRef] [PubMed]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR ata. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Gini, R.; Passoni, D.; Pinto, L.; Sona, G. Use of unmanned aerial systems for multispectral survey and tree classification: A test in a park area of northern Italy. Eur. J. Remote Sens. 2014, 47, 251–269. [Google Scholar] [CrossRef]
- Pierzchała, M.; Talbot, B.; Astrup, R. Estimating soil displacement from timber extraction trails in steep terrain: Application of an unmanned aircraft for 3D modelling. Forests 2014, 5, 1212–1223. [Google Scholar] [CrossRef]
- Gómez-Candón, D.; De Castro, A.I.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst. Eng. 2011, 108, 174–190. [Google Scholar] [CrossRef]
- Mader, D.; Blaskow, R.; Westfeld, P.; Maas, H.G. UAV-Based acquisition of 3D point cloud—A comparison of a low-cost laser scanner and SFM-tools. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 335–341. [Google Scholar] [CrossRef]
- Hrůza, P.; Mikita, T.; Janata, P. Monitoring of forest hauling roads wearing course damage using unmanned aerial systems. Acta Univ. Agric. Silvic. Mendel. Brun. 2016, 64, 1537–1546. [Google Scholar] [CrossRef]
- Ruggles, S.; Clark, J.; Franke, K.W.; Wolfe, D.; Reimschiissel, B.; Martin, R.A.; Okeson, T.J.; Hedengren, J.D. Comparison of SfM Computer Vision Point Clouds of a Landslide Derived from Multiple Small UAV Platforms and Sensors to a TLS based Model. J. Unmanned Veh. Syst. 2016, 4, 246–265. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Boon, M.A.; Greenfield, R.; Tesfamichael, S. Unmanned Aerial Vehicle (UAV) Photogrammetry Produces Accurate High-Resolution Orthophotos, Point Clouds and Surface Models for Mapping Wetlands. S. Afr. J. Geomat. 2016, 5, 186–200. [Google Scholar] [CrossRef]
- Sauerbier, M.; Eisenbeiss, H. Uavs for the Documentation of Archaeological Excavations. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 526–531. [Google Scholar]
- Bird, D.M. Unmanned Vehicle Systems and Wildlife Management in the 21st Century. Presentation. 2014. Available online: https://www.exeter.ac.uk/media/universityofexeter/esi/documents/uavmeetingpapers/D._Bird,_RSPB,_July_2014.pdf (accessed on 10 October 2016).
- Laliberte, A.S.; Herrick, J.E.; Rango, A.; Winters, C. Acquisition, Orthorectification, and Object-based Classification of Unmanned Aerial Vehicle (UAV) Imagery for Rangeland Monitoring. Photogramm. Eng. Remote Sens. 2010, 76, 661–672. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Hůlek, D.; Němec, V.; Szabo, S.; Sodomka, J. Current State of the Small RPAS Maintenance in the Czech Republic. Perner’s Contacts 2016, 11, 25–30. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Erenoglu, R.C. Generating a Digital Elevation Model using Unmanned Aerial System. Austrian J. For. Sci. 2016, 133, 47–61. [Google Scholar]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H.; Trémelo, M.-L. Potential and constraints of Unmanned Aerial Vehicle technology for the characterization of Mediterranean riparian forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Haala, N.; Cramer, M.; Rothermel, M. Quality of 3D Point Clouds from Highly Overlapping UAV Imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 4–6. [Google Scholar] [CrossRef]
- Tahar, K.; Ahmad, A. An Evaluation on Fixed Wing and Multi-Rotor UAV Images using Photogrammetric Image Processing. Waset Org. 2013, 73, 391–396. [Google Scholar]
- AgiSoft PhotoScan Professional. Software. Version 1.2.6. 2016. Available online: http://www.agisoft.com/downloads/installer/ (accessed on 10 October 2016).
- Šmelko, Š. Dendrometry; Technical University in Zvolen: Zvolen, Slovakia, 2007; p. 400. [Google Scholar]
- StatSoft, Inc. STATISTICA (Data Analysis Software System). Version 10. 2011. Available online: www.statsoft.com (accessed on 10 October 2016).
- QGIS Development Team. QGIS Geographic Information System. Open Source Geospatial Foundation Project. 2016. Available online: http://www.qgis.org/ (accessed on 10 October 2016).
- CloudCompare. GPL Software. Version 2.9 Alpha. 2016. Available online: http://www.cloudcompare.org/ (accessed on 10 October 2016).
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- James, L.A.; Watson, D.G.; Hansen, W.F. Using LiDAR data to map gullies and headwater streams under forest canopy: South Carolina, USA. Catena 2007, 71, 132–144. [Google Scholar] [CrossRef]
- Chisholm, R.A.; Cui, J.; Lum, S.K.Y.; Chen, B.M. UAV LiDAR for below-canopy forest surveys. J. Unmanned Veh. Syst. 2013, 1, 61–68. [Google Scholar] [CrossRef]
- Smreček, R.; Danihelová, Z. Forest stand height determination from low point density airborne laser scanning data in Rožňava Forest enterprise zone (Slovakia). IForest 2013, 6, 48–54. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A.; Osborn, J. The impact of the calibration method on the accuracy of point clouds derived using unmanned aerial vehicle multi-view stereopsis. Remote Sens. 2015, 7, 11933–11953. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovskỳ, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Goldstein, E.B.; Oliver, A.R.; DeVries, E.; Moore, L.J.; Jass, T. Ground control point requirements for structure-from-motion derived topography in low-slope coastal environments. PeerJ 2015. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117, F03107. [Google Scholar] [CrossRef]
- Tahar, K.N. An evaluation of different number of ground control points in unmanned aerial vehicle photogrammetric block. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-2/W2, 27–29. [Google Scholar] [CrossRef]
- Trajkovski, K.K.; Sterle, O.; Stopar, B. Sturdy positioning with high sensitivity GPS sensors under adverse conditions. Sensors 2010, 10, 8332–8347. [Google Scholar] [CrossRef] [PubMed]
- Ucar, Z.; Bettinger, P.; Weaver, S.; Merry, K.L.; Faw, K. Dynamic accuracy of recreation-grade GPS receivers in oak-hickory forests. Forestry 2014, 87, 504–511. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Site | Tree Cover 1 | Dominant Tree Species | Age | Height (m) | Slope (mean ± SD) | Vegetation Period | AMSL 2 (m) |
|---|---|---|---|---|---|---|---|
| Kremnica Mountains | 18% | Fagus sylvatica | 65 | 21 | 7 ± 2% | Non | 623–626 |
| High Tatras | 7% | Larix decidua | 75 | 26 | 13 ± 5% | Veg. | 1217–1224 |
| Modrý Kameň | 63% | Castanea sativa | 6–100 | 18 | 39 ± 14% | Veg. | 355–377 |
| Test Site | Flight Parameters | Point-Cloud Parameters | |||||
|---|---|---|---|---|---|---|---|
| No. of Photos | No. of Strips | No. of Flights 1 | Flight Duration 1 | Area | Number of Points | Average Points/m2 | |
| Kremnica Mountains | 241 | 4 | 2 | 25 min | 46 m × 44 m | 1,904,395 | 941 |
| High Tatras | 161 | 6 | 2 | 18 min | 71 m × 92 m | 9,659,176 | 1479 |
| Modrý Kameň | 333 | 5 | 3 | 28 min | 103 m × 113 m | 33,841,298 | 2908 |
| Test Site | GCP Configuration | ||||
|---|---|---|---|---|---|
| 4+ | 4 | 5 | 7 | 9 | |
| Kremnica Mountains | 0.040 | 0.040 | 0.040 | 0.041 | 0.037 |
| High Tatras | 0.066 | 0.101 | 0.086 | 0.080 | 0.072 |
| Modrý Kameň | 0.114 | 0.075 | 0.067 | 0.070 | 0.075 |
| Test Site | GCP Configuration | ||||
|---|---|---|---|---|---|
| 4+ | 4 | 5 | 7 | 9 | |
| Kremnica Mountains | 0.064 | 0.125 | 0.122 | 0.098 | 0.096 |
| High Tatras | 0.198 | 0.175 | 0.165 | 0.158 | 0.169 |
| Modrý Kameň | 0.106 | 0.077 | 0.078 | 0.077 | 0.076 |
| Test Site | Error | GCP Configuration | ||||
|---|---|---|---|---|---|---|
| 4+ | 4 | 5 | 7 | 9 | ||
| Kremnica Mtns | XY | 0.031 | 0.022 | 0.021 | 0.033 | 0.031 |
| Z | 0.049 | 0.018 | 0.053 | 0.045 | 0.058 | |
| High Tatras | XY | 0.043 | 0.091 | 0.089 | 0.080 | 0.079 |
| Z | 0.084 | 0.016 | 0.078 | 0.069 | 0.076 | |
| Modrý Kameň | XY | 0.049 | 0.061 | 0.074 | 0.072 | 0.075 |
| Z | 0.057 | 0.023 | 0.030 | 0.060 | 0.062 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomaštík, J.; Mokroš, M.; Saloň, Š.; Chudý, F.; Tunák, D. Accuracy of Photogrammetric UAV-Based Point Clouds under Conditions of Partially-Open Forest Canopy. Forests 2017, 8, 151. https://doi.org/10.3390/f8050151
Tomaštík J, Mokroš M, Saloň Š, Chudý F, Tunák D. Accuracy of Photogrammetric UAV-Based Point Clouds under Conditions of Partially-Open Forest Canopy. Forests. 2017; 8(5):151. https://doi.org/10.3390/f8050151
Chicago/Turabian StyleTomaštík, Julián, Martin Mokroš, Šimon Saloň, František Chudý, and Daniel Tunák. 2017. "Accuracy of Photogrammetric UAV-Based Point Clouds under Conditions of Partially-Open Forest Canopy" Forests 8, no. 5: 151. https://doi.org/10.3390/f8050151