
A Collision Avoidance Strategy Based on Entropy-Increasing Risk Perception in a Vehicle–Pedestrian-Integrated Reaction Space

Abstract
:1. Introduction
- (1)
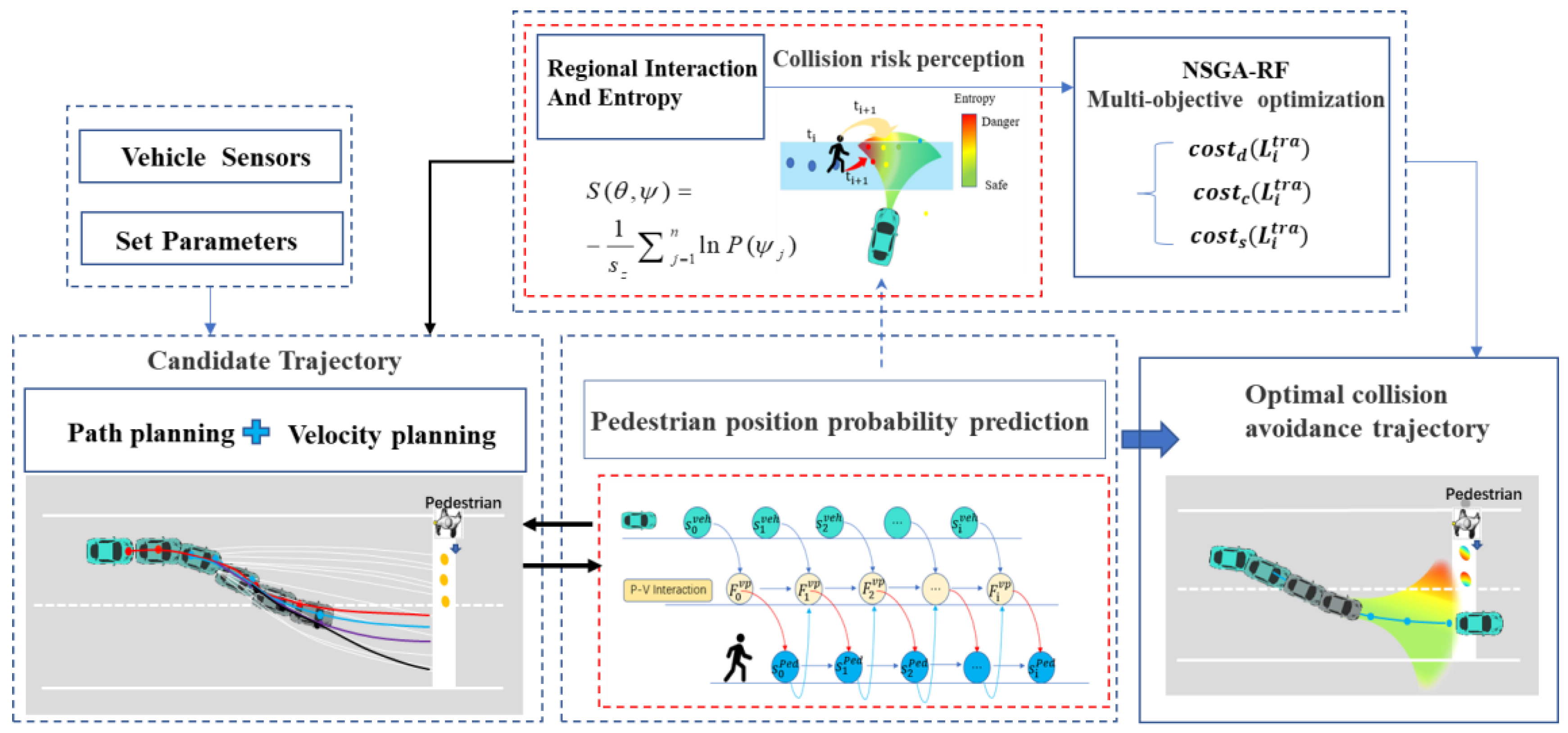
- A collision avoidance strategy based on reaction-space regions with entropy-increasing risk perception is proposed.
- (2)
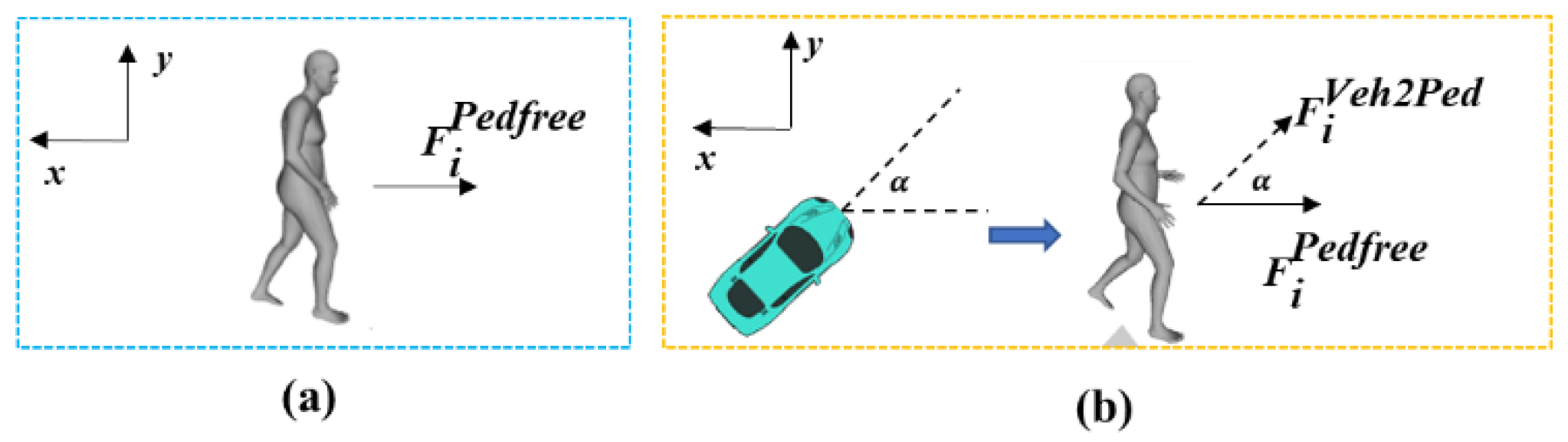
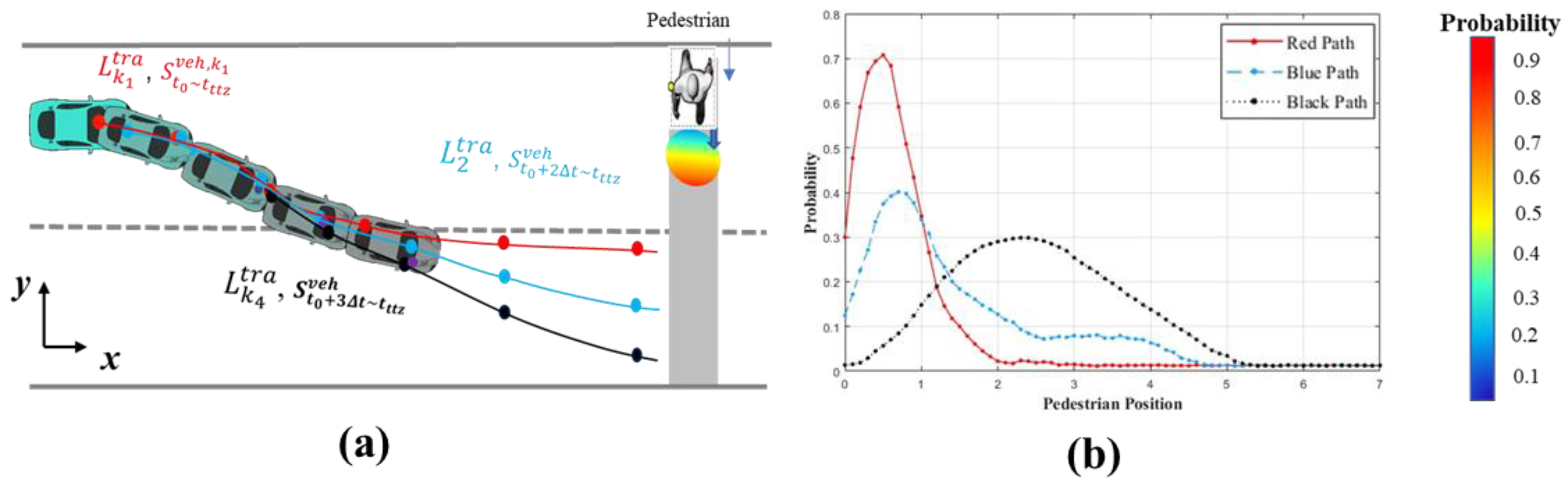
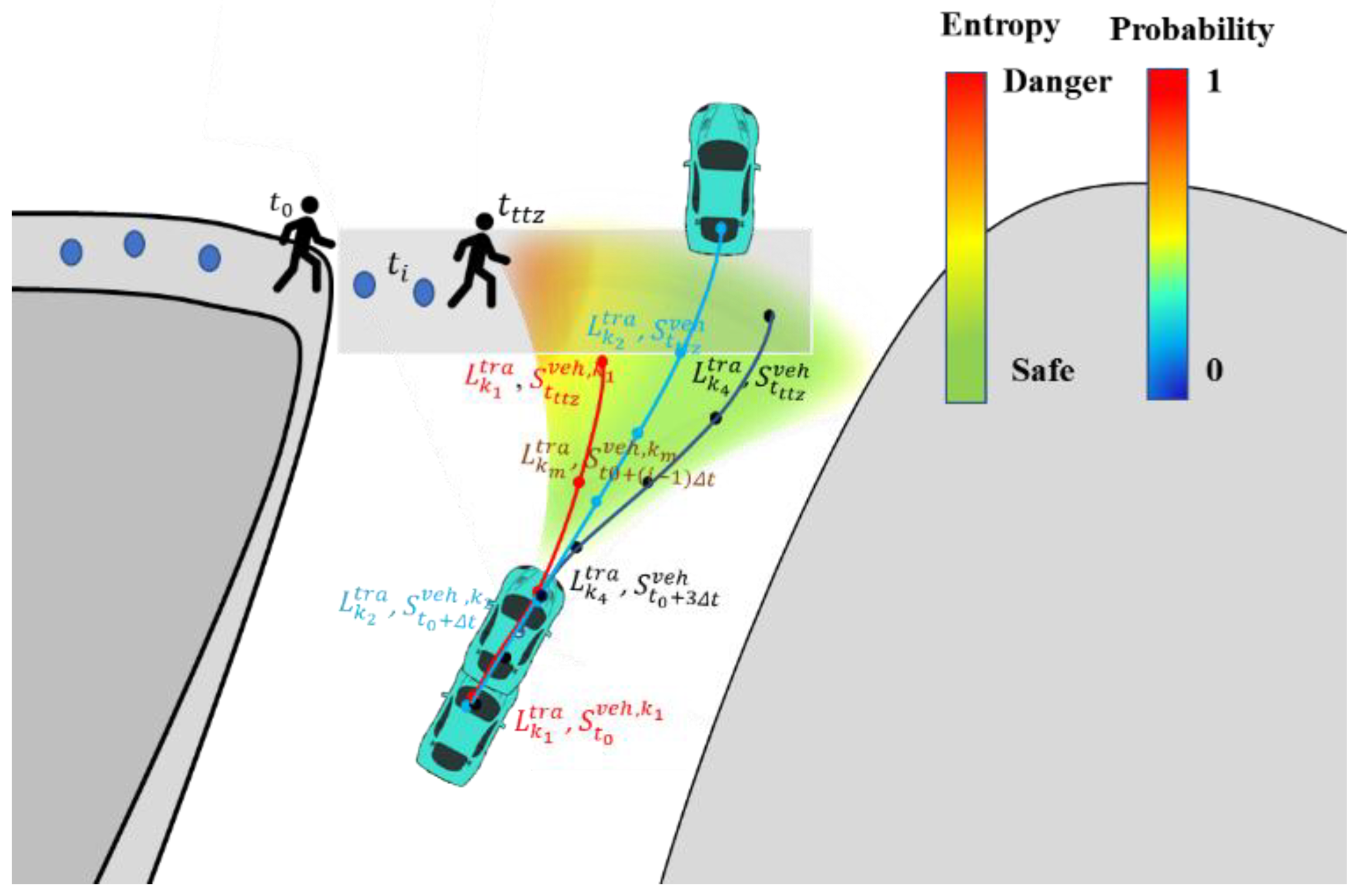
- Path and speed sequences are adopted to generate candidate trajectories while predicting the uncertain states of pedestrians based on the social force model and the Markov model.
- (3)
- Response-space entropy is used as a new cost function to measure the collision risk and to optimize multi-target trajectories while considering factors of entropy, safety, and stability.
2. Related Work
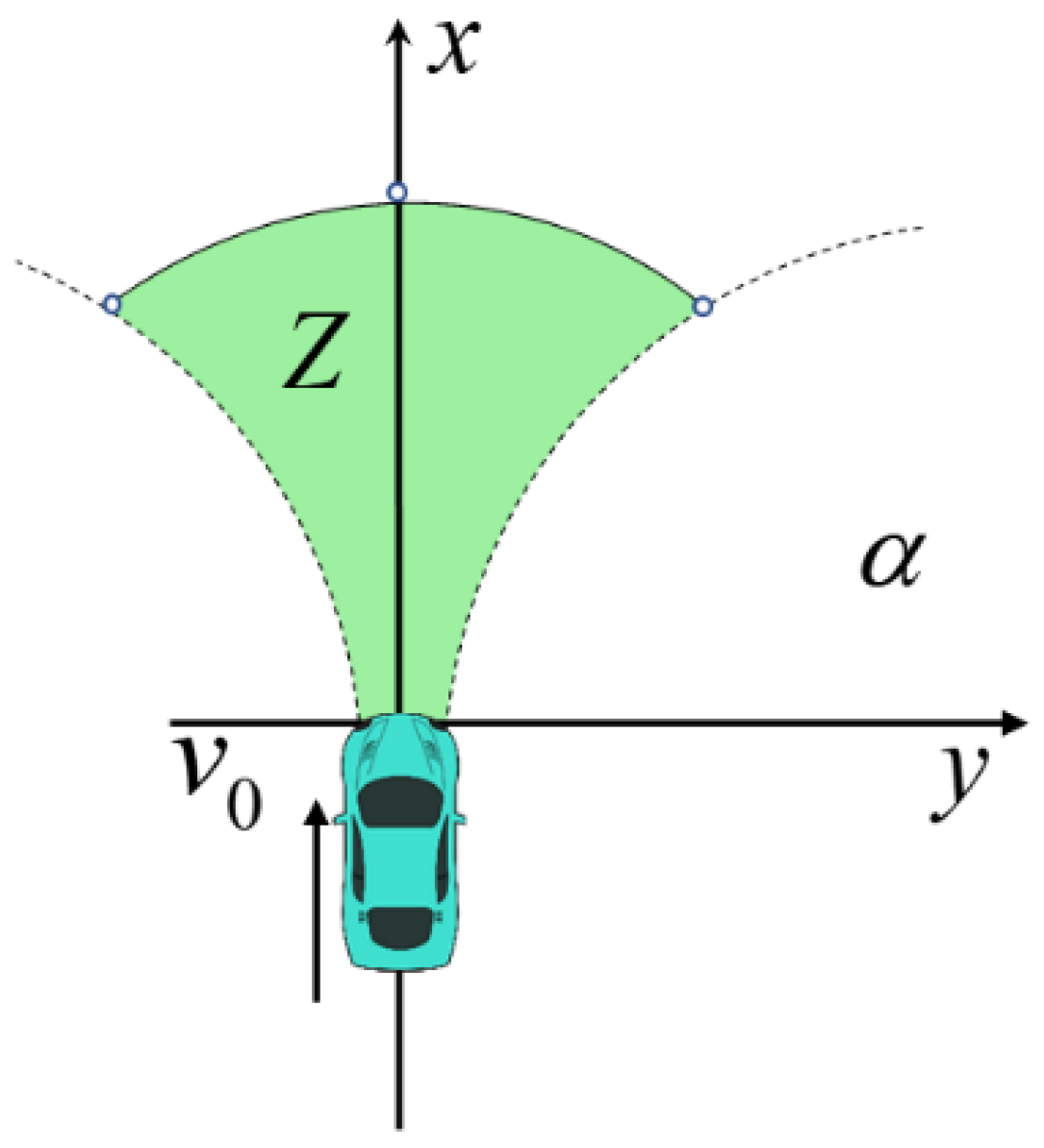
2.1. Reaction Space Constraints
2.2. Entropy Quantification and Collision Risk Perception
- (1)
- is a vector representing the existence of the entity in the constrained reaction-space area.
- (2)
- is the probability of the existence of the ith entity, referring to the ith pedestrian involved in the vehicle reaction space.
- (3)
- is defined as the unique interaction vector between the ith entity (pedestrian) and the vehicle.
- (4)
- is the probability of each vector interaction, which is considered as the probability of collision of the pedestrian interacting with the vehicle at different positions in the reaction space.
3. Generation of Candidate Trajectories
3.1. Path Planning
3.2. Velocity Planning
4. Construction of a Vehicle–Pedestrian Response-Space Entropy Interaction Model
4.1. Pedestrian Position Probability Prediction
4.2. Collision Hazard Perception Based on the Reaction-Space Entropy
5. Objective Evaluation of Candidate Trajectories
5.1. Cost Functions for the Perceived Risk
5.2. Optimal Trajectory Search Based on the NSGA-RF Algorithm
6. Simulations and Results Analysis
6.1. Simulation and Parameter Selection
6.2. Results Analysis
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Liniger, A.; Borrelli, F. Optimization-Based Collision Avoidance. IEEE Trans. Control Syst. Technol. 2021, 29, 972–983. [Google Scholar] [CrossRef]
- Li, H.; Zheng, T.; Xia, F.; Gao, L.; Ye, Q.; Guo, Z. Emergency collision avoidance strategy for autonomous vehicles based on steering and differential braking. Sci. Rep. 2022, 12, 22647. [Google Scholar] [CrossRef] [PubMed]
- Cheng, S.; Li, L.; Guo, H.-Q.; Chen, Z.-G.; Song, P. Longitudinal Collision Avoidance and Lateral Stability Adaptive Control System Based on MPC of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2376–2385. [Google Scholar] [CrossRef]
- Lee, D.N. A theory of visual control of braking based on information about time-to-collision. Perception 1976, 5, 437–459. [Google Scholar] [CrossRef] [PubMed]
- Keller, C.G.; Dang, T.; Fritz, H.; Joos, A.; Rabe, C.; Gavrila, D.M. Active Pedestrian Safety by Automatic Braking and Evasive Steering. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1292–1304. [Google Scholar] [CrossRef]
- Greene, D.; Liu, J.; Reich, J.; Hirokawa, Y.; Shinagawa, A.; Ito, H.; Mikami, T. An Efficient Computational Architecture for a Collision Early-Warning System for Vehicles, Pedestrians, and Bicyclists. IEEE Trans. Intell. Transp. Syst. 2011, 12, 942–953. [Google Scholar] [CrossRef]
- Kaempchen, N.; Schiele, B.; Dietmayer, K. Situation Assessment of an Autonomous Emergency Brake for Arbitrary Vehicle-to-Vehicle Collision Scenarios. IEEE Trans. Intell. Transp. Syst. 2009, 10, 678–687. [Google Scholar] [CrossRef]
- Joerer, S.; Segata, M.; Bloessl, B.; Cigno, R.L.; Sommer, C.; Dressler, F. To crash or not to crash: Estimating its likelihood and potentials of beacon-based IVC systems. In Proceedings of the 2012 IEEE Vehicular Networking Conference (VNC), Seoul, Republic of Korea, 14–16 November 2012; pp. 25–32. [Google Scholar]
- Schreier, M.; Willert, V.; Adamy, J. An Integrated Approach to Maneuver-Based Trajectory Prediction and Criticality Assessment in Arbitrary Road Environments. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2751–2766. [Google Scholar] [CrossRef]
- Howard, T.M.; Green, C.J.; Kelly, A. State Space Sampling of Feasible Motions for High Performance Mobile Robot Navigation in Highly Constrained Environments. In Proceedings of the 6th International Conference on Field and Service Robotics-FSR 2007, Chamonix, France, 9–12 July 2007. [Google Scholar]
- Boroujeni, Z.; Goehring, D.; Ulbrich, F.; Neumann, D.; Rojas, R. Flexible unit A-star trajectory planning for autonomous vehicles on structured road maps. In Proceedings of the 2017 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Vienna, Austria, 27–28 June 2017; pp. 7–12. [Google Scholar]
- Chen, Y.; Peng, H.; Grizzle, J.W. Fast Trajectory Planning and Robust Trajectory Tracking for Pedestrian Avoidance. IEEE Access 2017, 5, 9304–9317. [Google Scholar] [CrossRef]
- Yoshida, H.; Shinohara, S.; Nagai, M. Lane change steering manoeuvre using model predictive control theory. Veh. Syst. Dyn. 2008, 46, 669–681. [Google Scholar] [CrossRef]
- Berglund, T.; Brodnik, A.; Jonsson, H.; Staffanson, M.; Soderkvist, I. Planning Smooth and Obstacle-Avoiding B-Spline Paths for Autonomous Mining Vehicles. IEEE Trans. Autom. Sci. Eng. 2010, 7, 167–172. [Google Scholar] [CrossRef]
- Colorni, A.; Dorigo, M.; Maniezzo, V. An Investigation of some Properties of an “Ant Algorithm”. In Parallel Problem Solving from Nature 2, Proceedings of the Second Conference on Parallel Problem Solving from Nature, Brussels, Belgium, 28–30 September 1992; Elsevier Science Inc.: New York, NY, USA, 1992. [Google Scholar]
- Ho, P.; Chen, J. WiSafe: Wi-Fi Pedestrian Collision Avoidance System. IEEE Trans. Veh. Technol. 2017, 66, 4564–4578. [Google Scholar] [CrossRef]
- Bila, C.; Sivrikaya, F.; Khan, M.A.; Albayrak, S. Vehicles of the Future: A Survey of Research on Safety Issues. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1046–1065. [Google Scholar] [CrossRef]
- Rothenbücher, D.; Li, J.; Sirkin, D.; Mok, B.; Ju, W. Ghost driver: A field study investigating the interaction between pedestrians and driverless vehicles. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 795–802. [Google Scholar]
- Rasouli, A.; Kotseruba, I.; Tsotsos, J.K. Understanding Pedestrian Behavior in Complex Traffic Scenes. IEEE Trans. Intell. Veh. 2018, 3, 61–70. [Google Scholar] [CrossRef]
- Rasouli, A.; Tsotsos, J.K. Autonomous Vehicles That Interact With Pedestrians: A Survey of Theory and Practice. IEEE Trans. Intell. Transp. Syst. 2020, 21, 900–918. [Google Scholar] [CrossRef]
- Muzahid, A.J.M.; Kamarulzaman, S.F.; Rahman, M.A.; Murad, S.A.; Kamal, M.A.S.; Alenezi, A.H. Multiple vehicle cooperation and collision avoidance in automated vehicles: Survey and an AI-enabled conceptual framework. Sci. Rep. 2023, 13, 603. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Y.; Tasik, R.; Adhatarao, S.S.; Yuan, Y.; Liu, Z.; Fu, X. RACE: Reinforced Cooperative Autonomous Vehicle Collision Avoidance. IEEE Trans. Veh. Technol. 2020, 69, 9279–9291. [Google Scholar] [CrossRef]
- Nasernejad, P.; Sayed, T.; Alsaleh, R. Modeling Pedestrian Behavior in Pedestrian-Vehicle near Misses: A Continuous Gaussian Process Inverse Reinforcement Learning (Gp-Irl) Approach. Accid. Anal. Prev. 2021, 161, 106355. [Google Scholar] [CrossRef] [PubMed]
- Xue, H.; Huynh, D.Q.; Reynolds, M. A Location-Velocity-Temporal Attention LSTM Model for Pedestrian Trajectory Prediction. IEEE Access 2020, 8, 44576–44589. [Google Scholar] [CrossRef]
- Zhu, Y.; Qian, D.; Ren, D.; Xia, H. StarNet: Pedestrian Trajectory Prediction using Deep Neural Network in Star Topology. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 8075–8080. [Google Scholar]
- Rudenko, A.; Palmieri, L.; Herman, M.; Kitani, K.M.; Gavrila, D.M.; Arras, K.O. Human motion trajectory prediction: A survey. Int. J. Robot. Res. 2020, 39, 895–935. [Google Scholar] [CrossRef]
- Manglik, A.; Weng, X.; Ohn-Bar, E.; Kitani, K.M. Future Near-Collision Prediction from Monocular Video: Feasibility, Dataset, and Challenges. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019. [Google Scholar]
- Li, J.; Yao, L.; Xu, X.; Cheng, B.; Ren, J. Deep Reinforcement Learning for Pedestrian Collision Avoidance and Human-Machine Cooperative Driving. Inf. Sci. 2020, 532, 110–124. [Google Scholar] [CrossRef]
- Chen, Y.F.; Everett, M.; Liu, M.; How, J.P. Socially aware motion planning with deep reinforcement learning. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1343–1350. [Google Scholar]
- Dubey, V.; Kasad, R.; Agrawal, K. Autonomous Braking and Throttle System: A Deep Reinforcement Learning Approach for Naturalistic Driving. In Proceedings of the 13th International Conference on Agents and Artificial Intelligence, Online, 4–6 February 2021. [Google Scholar]
- Long, P.; Fan, T.; Liao, X.; Liu, W.; Zhang, H.; Pan, J. Towards Optimally Decentralized Multi-Robot Collision Avoidance via Deep Reinforcement Learning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6252–6259. [Google Scholar]
- Camara, F.; Bellotto, N.; Cosar, S.; Weber, F.; Nathanael, D.; Althoff, M.; Wu, J.; Ruenz, J.; Dietrich, A.; Markkula, G.; et al. Pedestrian Models for Autonomous Driving Part II: High-Level Models of Human Behavior. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5453–5472. [Google Scholar] [CrossRef]
- Koschi, M.; Althoff, M. Set-Based Prediction of Traffic Participants Considering Occlusions and Traffic Rules. IEEE Trans. Intell. Veh. 2021, 6, 249–265. [Google Scholar] [CrossRef]
- Manzinger, S.; Pek, C.; Althoff, M. Using Reachable Sets for Trajectory Planning of Automated Vehicles. IEEE Trans. Intell. Veh. 2021, 6, 232–248. [Google Scholar] [CrossRef]
- Jirovsky, V. Entropy in Reaction Space—Upgrade of Time-to-Collision Quantity. In Proceedings of the Wcx™ 17: Sae World Congress Experience, Detroit, MI, USA, 4–6 April 2017. [Google Scholar]
- Qu, P.; Xue, J.; Ma, L.; Ma, C. A constrained VFH algorithm for motion planning of autonomous vehicles. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 700–705. [Google Scholar]
- Ben-Naim, A. Entropy and Time. Entropy 2020, 22, 430. [Google Scholar] [CrossRef] [PubMed]
- Přibyl, O. Transportation, intelligent or smart? On the usage of entropy as an objective function. In Proceedings of the 2015 Smart Cities Symposium Prague (SCSP), Prague, Czech Republic, 24–25 June 2015; pp. 1–5. [Google Scholar]
- Zhang, Z.; Zhang, L.; Deng, J.; Wang, M.; Wang, Z.; Cao, D. An Enabling Trajectory Planning Scheme for Lane Change Collision Avoidance on Highways. IEEE Trans. Intell. Veh. 2023, 8, 147–158. [Google Scholar] [CrossRef]
- Gu, T.; Snider, J.; Dolan, J.M.; Lee, J. Focused Trajectory Planning for autonomous on-road driving. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23–26 June 2013; pp. 547–552. [Google Scholar] [CrossRef]
- Oikawa, S.; Matsui, Y.; Doi, T.; Sakurai, T. Relation between vehicle travel velocity and pedestrian injury risk in different age groups for the design of a pedestrian detection system. Saf. Sci. 2016, 82, 361–367. [Google Scholar] [CrossRef]
- Werling, M.; Kammel, S.; Ziegler, J.; Gröll, L. Optimal trajectories for time-critical street scenarios using discretized terminal manifolds. Int. J. Robot. Res. 2012, 31, 346–359. [Google Scholar] [CrossRef]
- Helbing, D.; Molnár, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282. [Google Scholar] [CrossRef]
- Feng, J.; Wang, C.; Xu, C.; Kuang, D.; Zhao, W. Active Collision Avoidance Strategy Considering Motion Uncertainty of the pedestrian. IEEE Trans. Intell. Transp. Syst. 2020, 23, 3543–3555. [Google Scholar] [CrossRef]
- Lv, H.; Liu, C.; Zhao, X.; Xu, C.; Cui, Z.; Yang, J. Lane Marking Regression From Confidence Area Detection to Field Inference. IEEE Trans. Intell. Veh. 2021, 6, 47–56. [Google Scholar] [CrossRef]
- Han, B.; Wang, Y.; Yang, Z.; Gao, X. Small-Scale Pedestrian Detection Based on Deep Neural Network. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3046–3055. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, H.; Yang, W.; Jin, W.; Zhu, W. Pedestrian Path Prediction for Autonomous Driving at Un-Signalized Crosswalk Using W/CDM and MSFM. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3025–3037. [Google Scholar] [CrossRef]
- Cao, N.; Wei, W.; Qu, Z.; Zhao, L.; Bai, Q. Simulation of Pedestrian Crossing Behaviors at Unmarked Roadways Based on Social Force Model. Discret. Dyn. Nat. Soc. 2017, 2017, 8741534. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Huang, J.; Hu, P.; Wu, K.; Zeng, M. Optimal time-jerk trajectory planning for industrial robots. Mech. Mach. Theory 2018, 121, 530–544. [Google Scholar] [CrossRef]
- Ramos, N.; Fontgalland, G.; Neto, A.G.; Barbin, S.E. NSGA-RF: Elitist non-dominated sorting genetic algorithm region-focused. In Proceedings of the 2017 IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Verona, Italy, 11–15 September 2017. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Value |
|---|---|---|
| Time for eliminating the brake clearance | 0.1 s | |
| Time for the braking force to increase | 0.1 s | |
| Step interval of the pedestrian | 0.5 s | |
| Safe walking radius for the pedestrian | 0.35 m | |
| Interaction coefficient | 4.7/5.5 | |
| Random fluctuation | ||
| Average pedestrian speed | m/s | |
| Velocity safety factor | ||
| Vehicle lateral radius | 1.1 m | |
| Safe driving radius of the vehicle | 1.6 m | |
| Weight coefficients of safety | 0.4 | |
| Weight coefficients of stability | 0.3 | |
| Weight coefficients of the reaction-space entropy | 0.3 |
| Group | |||||
|---|---|---|---|---|---|
| A(1) | 1.36 | 10.46 | 0.058 | 0.017 | 0.376 |
| AEB | 1.55 | 0 | 0 | 0.045 | 0 |
| A(2) | 1.19 | 9.31 | 0.031 | 0.036 | 0.564 |
| AEB | 1.55 | 0 | 0 | 0.045 | 0 |
| A(3) | 3.65 | 5.61 | 0.263 | 0.475 | 0.436 |
| AEB | 1.55 | 0 | 0 | ∞ | 0 |
| A(4) | 3.71 | 1.42 | 0.068 | 0.491 | 0.194 |
| AEB | 1.55 | 0 | 0 | ∞ | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, Y.; Zhang, W.; Wu, X.; Xu, J.; Gong, J. A Collision Avoidance Strategy Based on Entropy-Increasing Risk Perception in a Vehicle–Pedestrian-Integrated Reaction Space. World Electr. Veh. J. 2024, 15, 180. https://doi.org/10.3390/wevj15050180
Ding Y, Zhang W, Wu X, Xu J, Gong J. A Collision Avoidance Strategy Based on Entropy-Increasing Risk Perception in a Vehicle–Pedestrian-Integrated Reaction Space. World Electric Vehicle Journal. 2024; 15(5):180. https://doi.org/10.3390/wevj15050180
Chicago/Turabian StyleDing, Yongming, Weiwei Zhang, Xuncheng Wu, Jiejie Xu, and Jun Gong. 2024. "A Collision Avoidance Strategy Based on Entropy-Increasing Risk Perception in a Vehicle–Pedestrian-Integrated Reaction Space" World Electric Vehicle Journal 15, no. 5: 180. https://doi.org/10.3390/wevj15050180