Sustainable Adaptation of New Technology—The Case of Humanoids Used for the Care of Older Adults


Faculty of Engineering Management, Bialystok University of Technology, ul. Wiejska 45A, 15-351 Białystok, Poland
*
Author to whom correspondence should be addressed.
Sustainability 2018, 10(10), 3770; https://doi.org/10.3390/su10103770
Submission received: 13 September 2018
/
Revised: 15 October 2018
/
Accepted: 16 October 2018
/
Published: 18 October 2018
(This article belongs to the Section Sustainable Engineering and Science)
Abstract
:Ageing population poses new social, technological, and research challenges. It is anticipated that, by 2080, Poland will be in the group of counties that will have one-third of their population aged over 65. Different strategies aim at dealing with the mentioned demographic challenge, including widespread use of humanoids in the care of older people. As this research was the first of its kind in Poland, this article aims to identify the perceived key benefits that could shape positive attitudes toward humanoids in the care of older people. Based on the specific attributes of a humanoid technology, the model hypothesizes that an attitude toward a technology can be directly shaped by four kinds of perceived benefits, namely an impact on the quality of life, functional aspects, ethical problems, and a social impact. Also, a theoretical model assumes that a user attitude toward a humanoid technology is predicted to have an indirect influence on the future intended use. A survey method was used to collect research data. An electronic questionnaire was used to conduct confidential interviews of Polish citizens. All in all, 643 questionnaires were filled. Results received using structural equation modeling confirmed that the most important factor shaping human attitudes was a perceived social impact received from the use of humanoids in the care of the lonely people and making life more enjoyable for the elderly. Results also confirmed that men had a more positive attitude toward humanoids than women. Among different age groups of respondents, people between 26–40 years of age had the most relatively positive attitude toward humanoids.
1. Introduction
Globally, a systematic decrease in the numbers of retired active working-age people was observed for more than twenty years. On 1 January 2017, the world population amounted to 7.55 billion [1], and that of the European Union (EU) was 511.8 million [2]. Young people (0–14 years of age) constituted 25.92% of the world population and amounted to 15.6% in Europe. Persons considered to be of working age (15–64) accounted for 65.38% of the world population, and 65.00% of the EU population. On the other hand, the share of older adults (aged 65 and over) reached 8.70% globally and 19.40% in the EU, showing an increase of 0.3% compared to the previous year and a growth of 2.5% compared to the figure 10 years ago. With 33.37% of people aged 65 and over in the total population, Japan is in the lead globally. In the EU, Italy (22.0%), Greece (21.3%), and Germany (21.1%) are in the lead, while Ireland’s number of older adults is the smallest (13.2%). In Poland, young people account for 15.1% of the total population, while those aged 15–64 amount to 68.3%. In 2017, the Poles aged 65 and over totaled 16.5%, which was 0.5% more than in 2016.
Ageing of the society is confirmed by the increase in the number of the post-productive age people and the decline in the number of the pre-working age people. The ageing population is a global phenomenon, which seems to be one of the most important challenges facing the entire world, including the European Union and Poland [3]. The main reasons for this phenomenon include a steady increase in the life expectancy and low rates of natural increase in most European countries. The rate of natural increase depends on the numbers of births and deaths. The birth rate gradually decreased for several years. A decline in the rate of natural increase may be conditioned by different reasons, including the economic level of a country. Residents of highly developed countries tend to plan their lives, including families and education, based on financial means. Consequently, they have a more stable consumer lifestyle. In the opinion of Usman and Tomimoto, marrying late and postponing family life are among the reasons for the decrease in the number of births [4]. Working women often fear to lose their job and the lack of flexibility because of a child [5]. Economic insecurity [6] is yet another important reason. Also, ageing of the population depends on longer life expectancy, aided by better healthcare standards, health promotion, increased wealth, and industrialization. According to Nayu et al. and Reicha et al. the introduction of universal health insurance in 1961 had a significant impact on the reduction of deaths in Japan, providing access to a wide range of health services for the entire population [7,8]. In addition to the factors above, the phenomenon of a population is also affected by such aspects as a high level of wealth, a level of social protection, the proposed family model, and the level of education. This process is universal, unavoidable, and irreversible from the perspective of at least three or four generations. It is estimated that, in 2030, there will be as many as three people of retirement age for every four people of working age. According to the population forecast prepared by the United Nations for 2050, people aged over 65 will represent 15.82% of the population in the world and 27.85% in Europe (Table 1). Japan will continue to be in the lead with 36.37%. By 2080, the population aged over 65 will account for 20.05% globally, and 28.68% in Europe. In the case of Poland, it is forecasted that, in 2050, people aged over 65 will make up 31.64% of the population. This number is expected to grow by 3.61% in 2080 (35.25%).
Predictions related to the age structure of the population entail certain challenges for the global and the Polish economies of the population means greater healthcare spending, which has a direct impact on the public finance system. Also, the additional financial burden comes from the care of the older people. This can create a strain for public services such as the National Health Service, especially having in mind the decline in the number of working-age people. The following negative economic effects are frequently mentioned [9,10,11,12]: the reduction of capital investments due to higher retirement savings; the lack of employees; chronic and degenerative diseases; higher taxes; and the growing government spending on healthcare and pensions.
However, the positive side and opportunities created by changes in the age structure should not be undermined. Longer and healthier lives mean an extended working age, as well as a variety of new possibilities and services. Positive effects of an population include [13,14,15] (1) more employment opportunities at nursing homes and centers as a companion or an employee, (2) more homes and apartments for seniors, (3) younger pensioners helping with child care to relieve parents of the duty, allowing them to work creating greater economic and social benefits, (4) reduced crime as older people are more law-abiding, (5) volunteering or special advisory skills offered by older people who have free time and energy, (6) the knowledge and experience of older employees that can be used by some companies, and (7) fewer children in classes, ensuring better education. The effects of increasing life expectancy and an ageing population generate burdens for the economy. It is important, however, to improve the well-being of the society, as well as meet the needs of older people and use their potential. Nevertheless, it should be remembered that the increase in the number of older adults is also associated with the need to provide them with institutional support in the form of care, especially in the case of a low level of independence [16]. The increasing life expectancy and ageing will also stimulate changes in a family model. A significant part of the elderly will live separately, often away from their family, and depend on themselves. Lonely people will need full geriatric care offered at home and nursing homes [17]. Several researchers focused on exploring new methods to improve the quality of life of older adults by allowing them to remain independent and healthy to the maximum possible extent.
One of the fields aiming to find answers to the challenges of population ageing is gerontechnology—an interdisciplinary field of scientific research that uses technology for the aspirations and opportunities of older people. Humanoids—robots equipped with artificial intelligence and resembling humans—will be one of the technologies supporting older people [18] in the future [19]. Robots were proposed as a form of assistive device that can help bridge the widening gap between the demand and supply of healthcare services [20]. The expected growth in the share of the older population motivated researchers to design innovative solutions, including robots in the field of elderly care [21].
The use of modern technologies in everyday life depends on social, psychological, technological, and economic factors [22,23]. Each technology should be implemented in a sustainable way which means acceptance of the technology by society [24]. Among the social factors, demographic (age, education, and sex) and cultural (preparedness to innovations and trust in technology) characteristics will determine the social acceptance of solutions and the success of implementing new technologies [25].
Considering the current examples of the use of robots in the care of the older people (in Japan, the United States, France, and Germany) and the growing interest in this technology, this research focused on identifying the willingness to accept this important and desired solution. Poland and other countries that have a growing number of older adults need solutions that would help older adults in the future.
Results of a Eurobarometer survey showed that, throughout the EU, the care of older adults tops the list of areas where the use of robots should be banned. In 24 member states, absolute majorities of respondents held this view. Portugal (35%), Bulgaria (40%), and Malta (49%) were the only exceptions. The public opinion was most emphatic in Cyprus (85%), followed by Luxembourg (78%). Bulgaria and Poland were the only member states with less than three-quarters feeling uncomfortable about a robot minding their parents. However, more than nine out of ten respondents had the same feeling in Luxembourg (96%), France (95%), Germany and Sweden (93% each), and Cyprus and Slovenia (92% each) [26].
Frequently, socially assistive robotics is introduced as one of the solutions that could mitigate challenges created by the population ageing. On the other hand, these technologies are still at an early developmental stage and are not yet available on the mass market. Consequently, all research regarding the acceptance of robots should be useful to designers and help make solutions more useful, cheaper, and accepted by the society [27].
The decreasing number of formal and informal caregivers who provide support to older adults is a pressing issue. Many researchers are concerned with possible ways for the society to deal with the healthcare and social needs of population ageing [28].
Different types of technology, such as humanoids and socially assistive robots, could be one of the possible solutions for ageing populations. Many societies consider the evolution of robotics as a promising development that could help address the challenges of aged care [29]. However, continuous research efforts should be made to study the social acceptance and the ability to adapt to the new form of relationships.
The literature review indicated that robots could improve the quality of life of older people. Until now, no studies were carried out in Poland to determine the readiness of the Polish people to use robots in the future care of older adults and establish factors that could influence the use. This article aimed to identify the perceived key benefits that could shape positive attitudes toward humanoids used in the care of older people and the future intention to use such technology. The authors built a theoretical model that includes six variables: an impact on the quality of life, a functional aspect, ethical problems and the social impact, a user attitude toward a humanoid, and the future intention to use the technology. The model was empirically verified using a survey.
The remainder of the article consists of the following sections: Section 2 reviews the literature on the issues relating to robots used to improve the quality of life. Also, it gives examples of humanoids used for the care of older adults. The literature review distinguished two types of research on humanoids, firstly, related to the general social acceptance and factors determining the wider use of humanoids in everyday life, and secondly, associated with specific experiments concerning specific functionalities of robots in a group of people (children or older adults). Results of the literature review served as a basis for the formulation of hypotheses and the theoretical model presented in Section 3. Section 4 describes the methodology. Results are described in Section 5. Finally, Section 6 summarizes the findings and, the conclusions briefly explain the limitations of the research and implications for future research efforts. The main targets and functions of robots identified on the basis of the literature review served as the basis for the questionnaire regarding the technology assessment in terms of social and functional aspects, as well as the possible impact on the quality of life. Also, it served as the basis for the model determining the attitude pertaining to the use of humanoids.
2. Examples of Robots Used to Improve the Quality of Life
The conducted literature review allowed distinguishing between two types of research areas related to the acceptance of technology such as humanoids. One type is associated with specific experiments in a certain group of people (children or older adults) concerning specific functionalities of robots, and the second type is related to the general social acceptance and factors determining the wider use of humanoids in everyday life by society in general and older people in particular. It is widely known that widespread use of humanoids in the aged care will largely depend on the social acceptance of the new solution [21].
The first research area is related to the functionality of robots and contains a subject of research. Robots have a great potential to aid independence and improve health outcomes for older people, as well as relieve the burden for caretakers. The task of the robots is to help older adults to live and function independently to the fullest possible extent. Robots can be used by older people to lift, capture, or move items, be reminded about taking medications, recognize health issues and assess the situation, monitor and motivate walking, and meet social needs through interaction. Broekens et al. distinguished between two types of robots that facilitate the functioning of older adults [30]: robots used as workers for rehabilitation and robots used as social workers. Rehabilitation robots are mostly used for physical assistive technology features. They are not intended for communication with older adults; thus, they are not treated as social entities. Examples of such robots are smart wheelchairs [31], artificial limbs [32], lifting and walking robots, robotic beds [33], active orthoses [34], and exoskeletons [35]. In turn, social robots can be divided into service and associated workers. Service workers are used for handling the basic tasks of independent living, such as eating and bathing, mobility and navigation, nutrition advice, or health monitoring. Companion workers focus on improving the health and mental well-being of older adults. Often, however, social robots can be programmed to simultaneously perform activities providing support in the life of an older person (serve as service robots) and, at the same time, provide some company (serve as auxiliary robots). According to Kate Darling, a social robot is a materially incarnate, autonomous actor that communicates and interacts with a human on an emotional level. In addition, social robots follow the principles of social behavior, have diverse “states of mind”, and adapt to what they learn through interaction [36]. Social robots mostly resemble people (humanoid), dolls/toys (doll robot), or animals (animaloids and zoomorphic robots). Their character is of fundamental importance because the function of social robots is to interact with people on the emotional level, and this type of interaction is based on visual and tactile perception, in addition to verbal communication [37]. Table 2 presents the most important information regarding the selected robots, including the basic features of robots and the key purpose of their use. Four kinds of benefits connected with the use of robots were distinguished, namely the impact on the quality of life (QL), the social impact (S), functional aspects (F), and ethical problems (E).
Research on robots concerns both the anthropomorphic features of robots and the expression of realistic behavior by robots. Lazzeri et al. concentrated on the research of facial expressions performed by robot Eva because facial expressions convey emotional information that allows people to get involved in social interactions [44].
The second research area is connected with a level of social acceptance and awareness of robot functionality in daily life. All technology should be implemented sustainably. It is important to initially understand the motivations of older individuals to accept or reject a new technology [21]. Therefore, an increased understanding of factors predicting perceptions of a technology attributes can potentially facilitate the widespread implementation of the technology [45].
Authors Baganzi and Lau stated that factors affecting the sustainable adoption of a technology remain largely unknown. The sustainable adoption of a technology requires research that explains trust and risk perceptions held by society [46]. Sustainable adoption of a technology means the ability of the technology to improve social and economic development by providing access to applications addressing social challenges faced by vulnerable people, as well as enabling innovations [47]. According to a report by the Global System for Mobile Association (GSMA), a newly adopted technology should build societies that are environmentally sustainable [48]. The sustainable implementation of a technology requires identifying factors that determine this process [49].
The research conducted by Syrdal et al. aimed to identify cross-cultural attitudes toward humanoid robots in Japan and Western countries [50]. The authors tried to answer the following question: “How would people of Japan and Western countries react to the possible use of and daily encounter with humanoid robots?” The researchers used the Frankenstein syndrome questionnaire containing variables that reflect negative and positive attitudes of potential users, principle objections, trust in humanoids, and interpersonal fears.
Positive attitudes were connected to certain facts perceived by potential users, such as the ability of humanoids to make people’s lives easier, perform dangerous tasks, and be especially useful in teaching or caring of the older adults or people with disabilities. Negative attitudes were reflected by statements maintaining that widespread use of humanoid robots would take away jobs from people, have considerable maintenance costs, and could cause distress. Principle objections were connected with the fear that, in the future, society would be dominated by humanoid robots and a perceived threat that the development of humanoid robots was blasphemy against nature. With regards to trust, respondents believed that people and organizations that develop humanoid robots could be trusted and seemed sincere. Interpersonal fears reflected concerns that humanoid robots would encourage less interaction between humans; therefore, interaction with humanoid robots could sometimes lead to problems in relationships between people [50].
According to Broadbent et al., a key condition that helps increase the acceptance of healthcare robots is a proper assessment of human needs in the attempt to match them with the robot’s role, appearance, and behavior [20]. Authors distinguished between two groups of factors that determine the successful development and implementation of healthcare robots. The first group of factors was connected with individual features of users, such as age, needs, gender, cognitive ability, education level, experience, and culture. The second group of factors referred to robot features and included appearance (humanness and facial characteristics), size, gender, ergonomics, role, and “personality” [20]. Research results in the field of social psychology allowed the classification of factors into three groups: organizational, technological, and individual. The authors also pointed out the expectations of potential users with respect to robots as another important research area. The quality of interaction between humans and robots depends on the ability to answer user expectations [20].
A literature review by Deligianis et al. indicated that the ability to generate and maintain trust is of paramount importance to human–robot interaction [51]. In this type of relationship, trust depends on three main factors, namely a human, a robot, and an environment [52]. According to the literature review, human–robot interaction is also affected by (i) human-specific features that include national or cultural identity, age, expertise, and attentional load; (ii) environmental factors that relate to the situation or task at hand, including task load; and (iii) robot-specific features, such as task type, proximity to a robot, and robotic “attributes”, e.g., the robot’s appearance. Reliability and predictability of a robot seem to be the main performance-related factors that determine trust in human–robot interaction [51].
Heerink et al. researched factors that influence the future intention to use assistive social robots [53]. Apart from variables related to functional evaluation, such as perceived usefulness and perceived ease of use, the authors also considered variables that relate to social interaction. Based on the unified theory of acceptance and use of technology (UTAUT), authors explained the relationship between an attitude and an intention to use a robot. They proved that future intention is predicted by an attitude.
Torta et al. proved that people perceived robots more as companions and social actors rather than tools, and this was likely to steer user acceptance in a positive direction [54].
Literature studies confirmed the existing research interest in attitudes and factors that determine these attitudes in the context of the use of humanoids in the care of older adults. The future use of humanoids in the care of older adults will depend on the attitudes of users, which can be shaped in advance.
Identified theoretical, as well as practical, problems pose the following research questions: What perceived benefits related to the use of humanoids for the care of older adults determine attitudes of the Polish society toward humanoids? Do these attitudes determine the future intention of the Polish people to use humanoids?
3. Research Model and Hypotheses
The current and future technologic development depends on two basic factors: the development of technology determined by the level of technological knowledge and the acceptance of the technology by society. Authors of the book Technolife 2035: How Will Technology Change our Future? captured the process of new technology adoption through the prism of the diffusion of innovations theory [55]. According to the theory, firstly, a person becomes aware of a new technology (awareness), and this knowledge forms the basis of interest in this field (interest). Next, the person seeks additional information about the technology aiming to assess it. The following technology assessment process is based on available data obtained during the stage of interest. The assessment takes place prior to an attempt to use the technology, and it ultimately leads to its adoption.
Many theoretical models were developed to explain the processes related to the technology acceptance. The most popular is the technology acceptance model (TAM), developed in 1985 by Davis as a result of his doctoral dissertation prepared at the Massachusetts Institute of Technology (MIT) Sloan School of Management [56,57]. The model developed by Davis was based on the assumptions of the theory of reasoned action (TRA) developed by Ajzen and Fishbein [58]. According to TRA, the extent to which a technological solution is used depends on intentions, which, in turn, depend on user attitudes and subjective norms. According to the technology acceptance model, two variables—the ease of use and the usefulness of a system/technology—have a significant impact on user intentions without shaping attitudes (understood as a positive or negative feeling toward something) [59]. However, considering a different level of technology awareness, a user attitude toward a technology, and especially the one that raises social concerns will have a significant impact on the future intentions to use the technology. The conducted literature review resulted in a multitude of factors that determine the attitude and the future intention to use a humanoid for the care of older adults. Hudson et al. stated a limited amount of studies regarding the attitudes toward robots in general and particularly the ones used in the care of older adults [60]. Clearly, a robot can only find its place among humans if it meets actual user needs [61].
Considering the level of the use of robots in everyday life, as well as a relatively low level of robotics in Poland, it seems important to identify factors that determine the social acceptance of robots. While Japan, the United States, and Germany engage in advanced experiments on the use of specific robots and their functionalities from the perspective of a user, Poland still needs to research the area related to the building of social awareness regarding such advanced technologies.
As humanoids are an emerging technology with relatively few application examples, it might be difficult for users to accurately estimate the ease or difficulty of “use”, as well as its usefulness. Rapid introduction of new technologies made it more difficult to predict behaviors of end users. Consequently, the perceived usefulness and the ease of use may not fully explain user motives or attitudes [62]. A more holistic and integrated approach was recently suggested based on existing theories and empirical evidence [45]. Most technology acceptance studies focus on a limited set of factors that can influence the acceptance. However, none of them offer a comprehensive framework that includes key factors influencing technology acceptance. Many authors incorporated variables for the environment and market conditions into the original TAM. They also studied the effects of environmental factors, market conditions, and network externalities on consumer technology adoption behavior [63]. Considering the above, the authors considered two basic variables from the original TAM, namely the attitude and the future intention to use the technology. The model proposed by the authors focused on social and psychological factors that have a positive or negative impact on attitudes (acceptability) and intentions. Based on the specific attributes of the humanoid technology, the model hypothesizes that attitudes would be directly predicted by four perceived attributes, namely an impact on the quality of life, a technological impact, ethical issues, and social problems. Meanwhile, a user attitude toward humanoids is predicted to have an indirect influence on the future intention to use the technology (Figure 1).
Based on psychological theories and findings from technology acceptance studies [64], this paper proposes a technology acceptance framework to understand the acceptance of new energy technologies by citizens and consumers.
Mitzner et al. underline the importance of convincing older adults of the advantages offered by new technologies [65]. The benefits perceived by the respondents concerned technological aspects, social aspects (communication), safety and credibility, and improvement of the quality of life. Studies confirmed that, for older people, perceived benefits were more important than the costs associated with the purchase and use of the technology. Therefore, this research did not address the financial aspects related to the use of robots in the care of older adults.
Heerink included moderating factors in his empirical model and argued that future research on robots should use a complete inventory comprising various influence factors [66].
Studies conducted by Flandorfer indicated the factors determining the acceptance of assistive robots by older adults [27]. Analyzed variables included socio-demographic and technological factors, as well as factors related to ethical aspects or reflecting the functions of a technology in the improvement of the quality of life. Mynatt and Rogers stated that technology can maximize independence for older adults, and this can increase the perception of the quality of life [67]. Such technology can assist with daily activities and medical care, thus limiting the need to use family members and professional nurses. Arras and Cerqui also stated that robots would make older adults more independent and improve their quality of life [68].
Considering the above, the authors formulated the following hypothesis:
Hypothesis 1 (H1).
The impact on the quality of life has a strong and positive influence on an attitude toward the use of humanoids.
The adoption of new technologies depends on the functionalities perceived by potential users. A technology must be simple and easy to use, as well as have desired functionality and expected benefits. Van Dijk discovered that, in the case of older adults, the acceptance level and the motivation to use technological devices rise depending on the convenience and usefulness of the devices [69]. Scopelliti et al. confirmed that the perceived level of complexity of a robot and the service it provides are particularly important for older adults. The older the respondents were, the greater the number of them that believed that devices were far too complicated [70]. Functionality is another important technological aspect. Ezer et al. found that acceptance was also influenced by the perceived advantages offered by robots [71]. The less useful a robot seemed to be, the less likely it would be accepted in the home of an older adult. Cortellessa et al. noted that, compared to people living on their own, older adults living with a partner found robots more useful for personal safety or reminding of daily activities (e.g., taking medications) [72]. Access to health information provided by a robot was an especially frequently indicated humanoid functionality. According to Draper et al., older people rarely objected to the robot-assisted provision of health information to healthcare professionals [73].
Considering the importance of the technical functionality of robots in the context of their acceptance by older adults, the following hypothesis was formulated:
Hypothesis 2 (H2).
Functional aspects have a strong and positive influence on an attitude toward the use of humanoids.
Solis and Takanishi introduced the term “roboethics” to reflect research on potentialities and limitations of robots in relation to human beings [74]. According to Plas et al., social and ethical issues of robot development seem to be in their infancy; however, the interest in the topic is growing rapidly [75]. From the ethical point of view, the introduction of social robots into society can alter human understanding and human relations [76].
In addition to ethical issues, researchers focused on the problem of robot autonomy. Scopelliti et al. indicated that older adults preferred robots with limited autonomy due to perceived greater safety [70]. It was explored how potential stakeholders (older adults, as well as informal and formal caregivers) would resolve ethical conflicts related to the use of a social robot in the household of an older adult. Users were not convinced that a robot could autonomously and effectively encourage independence-promoting behavior. With regards to healthcare information, stakeholders were concerned with privacy issues [73].
The following hypothesis was formulated in the context of the link between ethical issues and attitudes:
Hypothesis 3 (H3).
Perceived ethical problems have a strong and positive influence on an attitude toward the use of humanoids.
From the points of view of application and research, the relationship between robots and humans needs to be explored in greater depth to ensure successful integration.
Plas et al. studied two respondent groups—robot experts and designated users—who strongly supported the vision that patients should lead a life as independently as possible [75]. Both groups agreed that interpersonal relationships should remain among a caretaker’s functions and should not be given over to robots. Authors summarized that humans should always be in control of robots. In the context of social impact, Scopelliti et al. noted that older adults were worried about a pleasant integration of robots into the socio-physical environment of their home [70]. Arras and Cerqui found that the majority of older adults did not think that robotics could contribute to their personal happiness [68]. All respondents of a study conducted by Draper et al. felt that human–human interaction should not be replaced by robots [73].
Taking the above into consideration, the following hypothesis was formulated:
Hypothesis 4 (H4).
The social impact has a strong and positive influence on an attitude toward the use of humanoids.
According to the theory of reasoned action (TRA) developed by Ajzen and Fishbein [58], attitudes create the intended behavior. Giger and Piçarra [77] underlined the role of attitudes toward working with social robots in the development of the intention to work with them in the near future. Similar results were achieved by Chen and Huang who confirmed that the intention to use assistant domestic robots was predicted by social attitude toward the technology [78]. This gave rise to the following hypothesis:
Hypothesis 5 (H5).
The attitude toward the use of humanoids has a strong and positive impact on the future intention to use humanoids.
Also, the empirical verification concerned a hypothesis indicating the link between the attitude toward humanoids and the age and gender of respondents.
With regards to age, stereotypes suggested that older adults were unwilling, unable, or afraid to use technological devices. In general, older age had a negative impact on the willingness of people to use robots; however, this depended on the context [20]. Large-scale studies regarding the use of technologies highlighted that older adults did not use technologies to the same extent as younger persons. Mitzner et al. confirmed that older adults reported more positive than negative attitudes about the technologies they used, and these results contradicted the stereotype regarding the fear or unwillingness of older adults to use technologies [65]. Czaja et al. investigated factors that predicted the use of technology. They found that, compared to younger adults, older adults were less likely to use computers, the internet, and other technologies [79]. Scopelliti et al. demonstrated the inexistence of significant differences between age groups and attitudes toward robots [70]. According to Arras and Cerqui, the attitude of people toward the use of technologies in their everyday life depends on the context [68]. When asked to imagine their daily life with a robot, some young people declared a positive attitude. Also, a growing tendency was noticed among older adults having a positive attitude toward the use of robots to ensure greater independence. Consequently, the following additional research hypothesis was formulated:
Hypothesis 6 (H6).
The attitude toward humanoids is the same across all age groups.
According to many researchers, gender is another factor that impacts on the use and acceptance of technologies [27]. Sun and Ahang confirmed that men were thought to be more task-oriented and motivated by the need to achieve specific goals. This has a direct impact on their perceived usefulness of a technology [80]. Accordingly, the following hypothesis was formulated:
Hypothesis 7 (H7).
The attitude toward humanoids is the same across all gender groups.
Figure 1 presents the conceptual model that reflects links between all theoretical variables.
In the proposed model, individual variables mean the following:
- the impact on the quality of life reflects the impact of the use of humanoids on the quality of life, the comfort of life, and the quality of the care system for older adults;
- the functional aspects reflect tasks performed by humanoids used by people and the usefulness of the technology;
- perceived ethical problems reflect a dilemma connected with a possibility to feel threatened in the presence of a robot;
- attitudes are understood as a positive or negative feeling toward something;
- the future intended use reflects the willingness to use the technology by potential users.
4. Research Methodology
4.1. Data
The conducted research focused on humanoids used in the care of older adults. A survey method was used to collect research data. An electronic questionnaire was used to conduct confidential interviews; it was distributed between April and May 2018. An invitation to participate in the research was disseminated using various social media and the “snowball” technique.
The electronic questionnaire targeted the Polish society. The number of returned questionnaires amounted to 643; 373 (58.0%) forms were filled by women and 270 (42.0%) forms were filled by men. Respondents aged 18–25 amounted to 32.7% (210 persons), 25.8% (166 persons) were 41–60, 24.9% (160 persons) were 26–40, and 16.4% (107 persons) were over 60.
4.2. Measures
Since some constructs included in the theoretical model could not be directly observed, a series of measures was used in each case. All constructs were measured using a seven-point Likert scale to access the degree to which a respondent agreed or disagreed with each of the items (1 = totally disagree; 7 = totally agree).
The measurement variables adopted on the basis of the literature describing particular constructs were subject to confirmatory factor analysis (CFA), the aim of which was to verify and confirm the structure of the adopted factor. CFA was used for four constructs—the impact on the quality of life, functional aspects, ethical problem, and social aspects—as the input to the attitude construct.
Considering the assumptions made, the analysis focused on linking the observable variables (items and statements from the questionnaire) to the indicated latent variables (unobservable constructs). Parameter values were estimated using the generalized least squares (GLS) estimator, which has a lower sensitivity to normal-distribution assumptions. The evaluation of individual measurement models resulted in modifications related to the values of standardized residual covariances and regression coefficients. Variables for which the value of the regression coefficient was lower than 0.6, and for which the standardized residual covariances were greater than 2 were removed from the original set of observable variables. Table 3 provides the list of variables resulting from the CFA. Table 4 presents descriptive statistics and composite reliability for the attitude and intended use variables.
Cronbach’s alpha coefficients of the constructs were used to verify the reliability of the scale and proved the acceptable reliability of the scale ranging from 0.724 to 0.912 (Table 3 and Table 4).
Within the construct reflecting an impact on the quality of life, highest ratings were given by respondents to the variable regarding the use of humanoids in the care of older people as a source of additional benefits, such as 24-h attendance, 24-h care, and a sense of security (QL2).
Within the construct reflecting the functionality of humanoids used in the care of older adults, the most important functions indicated by respondents were connected to easy and intuitive use of the humanoid support (F1), the ability to call for help on behalf of an older person (F6), and reminding an older person to take medications (F3). Respondents gave a relatively low score to the statement that the use of humanoid technology in the care of older adults was a very innovative and desired solution (F7). Variables F1 and F7 were excluded from the further analysis due to having a factor loading below 0.6.
From the ethical point of view, respondents expressed their concerns regarding moral dilemmas posed by the use of humanoids in the care of older adults, as well as doubts related to the ability to trust a humanoid (E1). Respondents did not seem to be afraid of a humanoid deliberately harming an older person (E4). Variable E1 was excluded from the further analysis due to having a factor loading below 0.6.
In the context of social impact, respondents believed that the use of humanoids would be particularly important in the care of the lonely people (S6). Relatively high scores were given to the safety function provided by humanoids to older adults (S3). However, some concerns were expressed regarding humanoids posing a threat to interpersonal relationships (S4). Variables S1, S3, and S4 were excluded from further analysis due to having a factor loading below 0.6 (S1 and S4) or due to the standardized residual covariance being greater than 2 (S3).
A positive attitude toward humanoids was indicated by expressing the ability to learn to use humanoids (AT2) and the perceived feeling of safety when accompanied by a humanoid (AT3). Respondents were cautious in their assessment of the presence of a humanoid being pleasant (AT1). Variable AT1, which indicated that being in the presence of a humanoid could be pleasant, was excluded from further analysis due to a strong correlation with variable S5, which indicated that the use of humanoids in the care of older adults would contribute to a more pleasant time for older people.
The future intention to use a humanoid was measured indirectly by asking questions about the possibilities of using humanoids in the care of family members (IN1) and personally (IN2). In both cases, respondents were rather cautious and evaluated such possibilities as low.
Comparing the four variables determining the attitudes of respondents toward the use of humanoids, the highest impact was achieved by the functional aspect of the technology (mean = 5.82). Meanwhile, the ethical aspect had the lowest influence (mean = 3.75) (Figure 2).
5. Results
To answer the research questions and verify the hypotheses, the authors used a two-step approach. First, the correlation analysis was used and followed up with the structural equation model (SEM).
Table 5 shows a correlation matrix for variables. Significant correlations were found between all constructs, and the dependence was rather strong. In the case of relationships between constructs of ethical problems and other variables, a negative correlation appeared with the average to moderate dependence.
Having satisfied the requirement arising from measurement issues, the structural model in Figure 1 was subsequently tested. The generalized least squares (GLS) model with AMOS was set to test the hypothesized relationships shown in Figure 3. GLS is a technique for estimating unknown parameters in a linear regression model. In the structural equation modeling, a measurement model allows setting the relationships between observed variables (i.e., indicators) and their respective unobserved (latent) variables by defining a particular structural model [17]. In Figure 3, the values on paths between latent variables are standardized regression coefficients, and numbers with latent variable indicators are factor loadings.
The hypotheses can be confirmed through the interpretation of the structural path coefficients. Only the relationships between the social impact and the attitude toward the use of humanoids were statistically significant (p < 0.05). Thus, this positive relationship confirmed hypothesis H4. Other hypotheses (H1, H2, H3, and H5) were rejected and did not confirm statistically significant relationships between the tested constructs (Table 6).
There is a consensus among researchers regarding the basic measures of model fit [81]. The commonly used measures of model matching include the root-mean-square error of approximation (RMSEA), (goodness-of-fit index) GFI, adjusted GFI (AGFI), and Hoelter test. According to Iacobucci [81], the most important measure is the chi-square test (CMIN) with the indication of the degrees of freedom and p-value. The perfect fit of the model was confirmed by the chi-square statistic, which indicated no statistically significant relationship (p > 0.05). However, the chi-square statistic has significant limitations regarding the sensitivity to the size of the sample. No matter the efforts, the value of the statistics would always indicate a poor fit of the model (p < 0.05). In this situation, the solution was to use the chi-square statistic/degrees of freedom (CMIN/DF), the value of which should not exceed 3, and the permissible level reaching up to 5.
The constructed measurement model had a satisfactory level of fit, which was confirmed by the value of the RMSEA index at the level of 0.067, GFI = 0.909, and Hoelter = 200.
For the RMSEA indicator with a good quality model, values were below 0.05, and the value of 0.08 was taken as the upper limit of the satisfactory estimate. The value of 0.1 was the limit value for the model rejection. The GFI value above 0.9 indicated an acceptable model fit. The model’s lower acceptable limit expressed by the “N” (Hoelter) test was 200 [81,82,83].
The Mann–Whitney U test was used to verify hypothesis H7. Based on the results of the analysis, significant differences were found in the level of attitude toward humanoids between respondents of different genders Z = −2.403; p < 0.05. Men had a more positive attitude to humanoids compared to women. For the purposes of graphical presentation of the attitude toward humanoids in gender groups, the box plot was used (Figure 4).
To verify hypothesis H6, a non-parametric ANOVA Kruskal–Walls test was used. The research proved that the attitude toward humanoids was differentiated across age groups (chi-square = 15.437; p < 0.005). Differences in the level of attitude toward humanoids within individual age groups were examined using the Dunn post hoc test. The obtained results of pairwise comparisons (between age groups) confirmed statistically significant differences in the level of positive attitude between the age groups of 18–25 and 26–40 (test value (T) = −3.424; p < 0.005) and between the age groups of 26–40 and 41–60 (test value (T) = 3.163; p < 0.01). The p-value for pairwise comparisons is shown in Figure 5.
6. Discussion
The conducted literature review, as well as the present research, confirmed that an attitude toward humanoids could be shaped by four factors: an impact on the quality of life, functional aspects, ethical problems, and a social impact.
Average scores on the seven-point Likert scale given by respondents showed that the functional aspects of humanoids received the highest marks. The following four variables reflecting the functional aspects received the highest marks given by respondents in the seven-point Likert scale: “the use of humanoids should be easy and intuitive” (F1, mean = 6.40), “an important feature of a humanoid will be the ability to call for help on behalf of an older person” (F6, mean = 6.26), another “important feature of a humanoid would be the ability to remind an older person about the time to take medications” (F3, mean = 6.02), and yet another “important feature of a humanoid will be the ability to inform the family members about the health condition of the minded older adults” (F5, mean = 5.88). The research conducted by Deligianis et al. also confirmed that tasks and functions performed by humanoids were important factors determining the humanoid acceptance [51]. Regarding tasks performed by humanoids, respondents would expect improvement in the communication between older people and their environment (e.g., family members). The research conducted by Nomura et al. confirmed that people expected robots to perform communication tasks, such as serve in public settings, as well as provide care at home or welfare facilities [64]. Ezer et al., Cortellessa et al., and Draper et al. also confirmed that different humanoid functions could be important for the acceptance of the technology by society [71,72,73].
The second ranking was given to the construct regarding the possibility of humanoids to improve the quality of life (QL) of older adults. Assessing the variables affecting the improvement of the quality of life of older adults, the respondents gave high scores to the statement that “the use of humanoids in the care of older adults will be a source of additional benefits (24-h attendance, 24-h care, and a sense of security)”. The mentioned features would contribute to greater independence of older adults. The same was confirmed by Mynatt and Rogers [67], as well as Arras and Cerqui [68], who proved that the use of robots could maximize the independence of older adults.
Ethical problems perceived by respondents were mostly connected with perceiver trust and threats in relation to humanoids and robots.
Respondents signaled their fears and doubts regarding a possibility to trust humanoids (mean = 5.26). Research efforts by other authors demonstrated that trust in human–robot interaction is crucial for the technology acceptance. Gaudiello et al. analyzed functional and social types of human acceptance of robots. Functional acceptance means the trust of users in the functional savvy of robots, and social acceptance is the trust of users in the social savvy of robots. Researchers proved that robots seemed to be more trusted with functional rather than social tasks [84]. Deligianis et al. discovered that people were willing to trust robots when it meant they could accomplish a more difficult task with this kind of help [51]. Regarding the perceived threats caused by robots, the Poles were not afraid of humanoids endangering the health or life of a user (mean = 3.67) or deliberately harming an older person (mean = 2.77). A low level of assessment given to indicated variables reflects a relatively high level of trust in humanoids among the respondents. The respondents were afraid that a humanoid could inadvertently harm an older person (mean = 4.80). This fear of robots confirms the conclusion by Scopelliti et al. that older adults would prefer robots with limited autonomy [70]. A negative correlation coefficient between variables connected to ethical problems and attitudes toward humanoids shows that when people perceive a new technology in the context of threats and distrust, no positive attitudes can be expected. Social programs aimed at building awareness, as well as education programs, should be focused on showing positive examples of humanoids helping people to avoid any threats rather than being the source of danger.
The social impact of humanoids was measured by items reflecting the possibilities of making life more pleasant (mean = 3.94) and taking care of the lonely people (mean = 5.08). In relation to loneliness, the most important aspect was to ensure as independent a life for an older person as possible [75]. In the context of making life more pleasant using humanoids, Arras and Cerqui confirmed that older adults did not think that robotics could contribute to their personal happiness [68]. The statement regarding the improved safety of older adults received a relatively high ranking (mean = 4.67) but was excluded from the analysis following confirmatory factor analysis. Respondents stressed the importance of measurable social benefits brought by humanoids in the care of older adults. At the same time, respondents indicated their concerns regarding possible threats to interpersonal relationships and the creation of new jobs. A low level of assessment given to the possibility of new job creation (mean = 3.24) suggested that respondents were rather inclined to agree that robots could pose a threat to the labor market. The achieved results were consistent with the results received from a Eurobarometer survey, which confirmed that robots would steal people’s jobs. Only five member states—Denmark (65%), Finland (57%), Lithuania (52%), Sweden (51%), and Austria (50%)—had absolute majorities agreeing that widespread use of robots could boost job opportunities in the EU [22]. From the sociological point of view, respondents were concerned about interpersonal relationships. They thought humanoids might pose a threat to interpersonal relationships (mean = 3.14). Also, research results by Syrdal et al. confirmed that the use of humanoids might threaten interpersonal relationships [50]. Moreover, Draper et al. felt that human–human interaction should not be replaced by robots [73].
A positive attitude reflects the readiness to learn to use a humanoid if needed (AT2, mean = 6.21). More often, respondents declared that they would feel safe in the company of a humanoid (AT3, mean = 4.21), and, this way, time would be pleasantly spent (AT1, mean = 3.84). It was strange that respondents were more willing to use the help of a humanoid for their personal care (IN2, mean = 3.79) than for the care of a family member (IN1, mean = 3.33). The conducted research did not confirm that attitudes toward humanoids determined the future intention to use the technology. In many cases, studies regarding the adoption of a new technology pointed out the contrary, i.e., that attitudes toward a particular technology influenced the future intended use [85,86]. It should be mentioned that some respondents believed that being in the presence of a humanoid could be pleasant and safe.
Considering the demographic features of a respondent, the achieved results confirmed that human attitudes toward humanoids depended on age and gender.
The research confirmed statistically significant differences between attitudes toward humanoids depending on age groups of respondents; however, some other research efforts demonstrated no significant differences between age groups in terms of their attitudes toward robots [70].
The research by Hudson et al. confirmed that young people were relatively positive about robots, but older adults were rather negative [60]. The research conducted here confirmed the same dependence, but only between the groups of people aged 26–40 and 41–60. Also, Czaja et al. found that older adults were less likely to use different technologies compared to younger adults [79]. Such a positive dependence between the attitude and age was not confirmed in the age groups of 18–25 and 26–40. In this case, older respondents were relatively more positive about robots compared to younger respondents. The results of this analysis confirmed the results received by Nomura et al., showing that age also seemed important in Western cultures, with the youngest group of participants being the most skeptical of humanoid robots, both in terms of their general attitudes, as well as interpersonal fears, when compared to older age groups [64]. Similar results were received by Turja et al. who concentrated on researching the attitudes of healthcare professionals toward robots and robot acceptance at work. Among healthcare professionals, a younger age predicted a lower level of robot acceptance at work [87]. The study of attitudes toward humanoids in the care of older adults held by particular age groups is important because the process of technology development seems to be relatively long and its implementation on a mass scale might be seen by the current generation of the youngest citizens. Often, the more positive attitude of older people toward humanoids might stem from either living in loneliness or the lack of faith that the technology would become widely used. The knowledge about attitudes toward humanoids and factors that determine such a stance may help in the adjustment of the future education system aimed at particular social groups, as well as in the building of positive attitudes.
The obtained results that differentiated attitudes toward humanoids by gender confirmed that men had a more positive attitude compared to women. The diversity of attitudes toward humanoids depending on gender was confirmed by other authors, although the results were not clear-cut. Tung researched a group of children and confirmed that girls were more accepting and reflected more positive attitudes toward humanoids compared to boys [88]. Turja et al. concentrated on the research of attitudes held by healthcare professionals toward robots and robot acceptance at work. The general view of robots was consistently the most positive among men representing Finnish healthcare professionals [87]. Also, Sun and Ahang proved that men had a more positive attitude toward the usefulness of technologies than women [80].
Structural equation modeling confirmed that, from among four variables—the impact on the quality of life, functional aspects, ethical problems, and social aspects—social aspects were the most important factor that shaped attitudes of older adults toward humanoids. The most important group of older adults was that of people living alone who might expect that humanoids would make their life more pleasant.
7. Conclusions
The literature review confirmed that the processes of ageing population inspires researchers to investigate whether and to what extent the use of humanoids in the care of older people could at least partially solve the problems of an ageing society, mainly in the context of ensuring independence for this social group and improving their quality of life.
According to a Eurobarometer survey, the Polish society belongs to the group of countries in which (compared to other EU countries) a relatively small group of the population would feel uncomfortable having a robot mind their older parents. Gathering the knowledge about determinants that affect attitudes toward humanoids in the Polish society still remains valuable and necessary from the perspective of momentum gained by the process of population ageing.
On the one hand, the aim of the research was to identify perceived key benefits that could shape positive attitudes toward humanoids in the care of older people, and on the other hand, the study searched for the dependence between an attitude toward humanoids and the future intention to use the technology.
The Polish society believes that, from the social point of view, using humanoids in the care of older adults could be particularly important in the case of lonely people. The analyzed technology could be useful for reminding an older person about taking medications, informing the family members about the health condition of the older adult, and calling for help on the behalf of an older person. Respondents did not believe that a humanoid could deliberately harm an older person. Results confirmed that respondents were aware of the fact that humanoids could occupy jobs and impact labor markets negatively, and they did not believe that humanoids used in the care of older people could create new jobs.
The main limitation of the conducted research was too general a view of benefits shaping the attitudes toward humanoids and the future intended use. As the research was the first of its kind in Poland, and considering the low level of social awareness and practical application of the technology, the authors decided to use more general questions and not delve deeply into all factors that impact on human attitudes toward humanoids.
Therefore, the achieved results could be useful, serving as a starting point for the future research. Topics of possible future research could include an investigation of factors influencing different types of attitudes (cognitive and affective) and an investigation of different types of motivation to use humanoids in the care of older adults (an obligatory or voluntary use of the technology). Also, more research efforts are required regarding the influence of humanoids on the labor market. An additional variable that could influence the future use of humanoids would be user experiences in other spheres of life.
Author Contributions
Two authors contribute equally to this paper.
Funding
This research was funded by Ministry of Science and Higher Education grant number S/WZ/1/2014 and S/WZ/1/2017.
Conflicts of Interest
The authors declare no conflicts of interest
References
- United Nations. World Population Prospects: The 2017 Revision. Available online: https://esa.un.org/unpd/wpp (accessed on 3 August 2018).
- Eurostat. Available online: http://appsso.eurostat.ec.europa.eu/nui/submitViewTableAction.do (accessed on 3 August 2018).
- Ejdys, J. Innovativeness of residential care services in Poland in the context of strategic orientation. Procedia Soc. Behav. Sci. 2015, 213, 746–752. [Google Scholar] [CrossRef]
- Usman, M.; Tomimoto, I. The Aging Population of Japan: Causes, Expected Challenges and Few Possible Recommendations. Res. J. Recent Sci. 2013, 2, 1–4. [Google Scholar]
- Grant, J.; Hoorens, S.; Sivadasan, S.; van het Loo, M.; DaVanzo, J.; Hale, L.; Gibson, S.; Butz, W. Low Fertility and Population Ageing: Causes, Consequences, and Policy Options; RAND: Santa Monica, CA, USA, 2004. [Google Scholar]
- Bloom, D.; Canning, D.; Sevilla, J. The Demographic Dividend. A New Perspective on the Economic Consequences of Population Change; Rand document MR-1274; RAND: Santa Monica, CA, USA, 2003. [Google Scholar]
- Ikeda, N.; Saito, E.; Kondo, N.; Inoue, M.; Ikeda, S.; Satoh, T.; Wada, K.; Stickley, A.; Katanoda, K.; Mizoue, T.; et al. Japan: Universal Health Care at 50 Years. What has made the population of Japan healthy? Lancet 2011, 378, 1094–1105. [Google Scholar] [CrossRef]
- Reicha, M.R.; Shibuya, K.; Takemi, K. 50 years of pursuing a healthy society in Japan. Lancet 2011, 378, 1051–1053. [Google Scholar] [CrossRef]
- Pettinger, T. The Impact of an Ageing Population on the Economy. Economics Help Revision. 2013. Available online: http://www.economicshelp.org/blog/8950/society/impact-ageing-population-economy/ (accessed on 4 October 2018).
- Jowit, J. Ageing population will have huge impact on social services. The Guardian. 2013. Available online: http://www.theguardian.com/society/2013/feb/24/britain-ageing-population-lords-inquiry (accessed on 4 October 2018).
- WHO. Global Health and Aging. 2012. Available online: http://www.who.int/ageing/publications/global_health.pdf (accessed on 4 October 2018).
- Serban, A.C. Aging population and effects on labour market. Procedia Econ. Financ. 2012, 1, 356–364. [Google Scholar] [CrossRef]
- Marešová, P.; Mohelská, H.; Kuča, K. Economics Aspects of Ageing Population. Procedia Econ. Financ. 2015, 23, 534–538. [Google Scholar] [CrossRef]
- Geogonline. Opportunities from an Ageing Population. 2013. Available online: www.geogonline.org.uk/Opportunities (accessed on 4 October 2018).
- Ejdys, J.; Gedvilaite, D. Learning orientation in nursing homes in Poland. Eng. Manag. Prod. Serv. 2017, 9, 51–62. [Google Scholar] [CrossRef] [Green Version]
- Polak-Sopinska, A.; Wisniewski, Z.; Jedraszek-Wisniewska, M. HR Staff Awareness of Disability Employment as Input to the Design of an Assessment Tool of Disability Management Capacity in Large Enterprises in Poland. Procedia Manuf. 2015, 3, 4836–4843. [Google Scholar] [CrossRef]
- Ejdys, J. Prospective Quality Attributes of Nursing Home Care Services. In Proceedings of the 9th International Scientific Conference Business and Management, Vilnius, Lithuania, 12–13 May 2016. [Google Scholar] [CrossRef]
- Wiśniewski, Z.; Polak-Sopińska, A. HCI Standards for Handicapped. In Universal Access in Human-Computer Interaction. Addressing Diversity. UAHCI 2009. Lecture Notes in Computer Science; Stephanidis, C., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5614, pp. 672–676. [Google Scholar]
- Koops, E.J.; Di Carlo, A.; Nocco, L.; Cassamassima, V.; Stradella, E. Robotic technologies and fundamental rights. Int. J. Technoethics 2013, 4, 15–35. [Google Scholar] [CrossRef]
- Broadbent, E.; Stafford, R.; MacDonald, B. Acceptance of Healthcare Robots for the Older Population: Review and Future Directions. Int. J. Soc. Robot. 2009, 1, 319–330. [Google Scholar] [CrossRef]
- Piezzo, Ch.; Suzuki, K. Feasibility study of a socially assistive humanoid robot for guiding elderly individuals during walking. Future Internet 2017, 9, 30. [Google Scholar] [CrossRef]
- Nazarko, L. Responsible Research and Innovation—A New Paradigm of Technology Management. In Proceedings of the 9th International Scientific Conference Business and Management, Vilnius, Lithuania, 12–13 May 2016. [Google Scholar] [CrossRef]
- Nazarko, L. Future-Oriented Technology Assessment. Procedia Eng. 2017, 182, 504–509. [Google Scholar] [CrossRef]
- Halicka, K. Main Concepts of Technology Analysis in the Light of the Literature on the Subject. Procedia Eng. 2017, 182, 291–298. [Google Scholar] [CrossRef]
- Halicka, K. The reference methodology of prospective analysis of technology in production engineering. In 8th International Conference on Engineering, Project, and Product Management (EPPM 2017), Lecture Notes in Mechanical Engineering; Springer: Cham, Switzerland, 2018; pp. 99–107. [Google Scholar]
- Public Attitudes towards Robots. Special Eurobarometer 382/Wave EB77.1-TNS Opinion & Social, September 2012. Available online: http://ec.europa.eu/commfrontoffice/publicopinion/index.cfm/Survey/getSurveyDetail/search/robot/surveyKy/1044 (accessed on 3 September 2018).
- Flandorfer, P. Population ageing and socially assistive robots for elderly persons: The importance of sociodemographic factors for user acceptance. Int. J. Popul. Res. 2012, 12, 13. [Google Scholar] [CrossRef]
- Colombo, F.; Llena-Nozal, A.; Mercier, J.; Tjadens, F. Help Wanted? Providing and Paying for Long-Term Care; OECD Publishing: Paris, France, 2011; Available online: http://dx.doi.org/10.1787/9789264097759-en (accessed on 1 August 2016).
- Vandemeulebroucke, T.; Dierckx de Casterlé, B.; Gastmans, C. How do older adults experience and perceive socially assistive robots in aged care: A systematic review of qualitative evidence. Aging Ment. Health 2018, 22, 149–167. [Google Scholar] [CrossRef] [PubMed]
- Broekens, J.; Heerink, M.; Rosendal, H. Assistive social robots in elderly care: A review. Gerontechnology 2009, 8, 94–103. [Google Scholar] [CrossRef]
- Gomi, T.; Griffith, A. Developing intelligent wheelchairs for the handicapped. In Assistive Technology and Artificial Intelligence; Mittal, V., Yanco, H., Aronis, J., Simpson, R., Eds.; Springer: Berlin, Germany, 1998; Volume 1458, pp. 150–178. ISBN 978-3-540-68678-1. [Google Scholar]
- Bhattacharyya, S.; Konar, A.; Tibarewala, D. A differential evolution based energy trajectory planner for artificial limb control using motor imagery EEG signal. Biomed. Signal Process 2014, 11, 107–113. [Google Scholar] [CrossRef]
- Choi, H.; Park, J.O.; Ko, S.Y.; Park, S. Deflection analysis of a robotic bed on the applied loads and its postures for a heavy-ion therapeutic system. In 9th International Conference on Robotic Vision, Signal Processing and Power Applications; Springer: Singapore, 2014; pp. 343–350. [Google Scholar]
- Yan, T.; Cempini, M.; Oddo, C.; Vitiello, N. Review of assistive strategies in powered lower limb orthoses and exoskeletons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Kazerooni, H. Exoskeletons for human power augmentation. Presented at the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Darling, K. Extending Legal Rights to Social Robots. Paper presented at We Robot Conference, University of Miami, 23 April 2012; Available online: http://ssrn.com/abstract=2044797 (accessed on 3 August 2018).
- Campa, R. Roboty społeczne i praca socjalna [Social Robots and Social Work]. Zeszyty Pracy Socjalnej 2016, 21, 65–75. [Google Scholar] [CrossRef]
- Sony. Sony Launches Four-Legged Entertainment Robot. Available online: http://www.sony.net/SonyInfo/News/Press_Archive/199905/99-046/ (accessed on 3 August 2018).
- Martinez-Martin, E.; del PobilCosta, A.P. Personal Robot Assistants for Elderly Care: An Overview. In Personal Assistants: Emerging Computational Technologies; Costa, A., Julian, V., Novais, P., Eds.; Springer: Cham, Switzerland, 2018; Volume 132, pp. 77–91. ISBN 978-3-319-62529-4. [Google Scholar]
- Klamer, T.; Ben Allouch, S. Acceptance and use of a social robot by elderly users in a domestic environment. Presented at the Pervasive Computing Technologies for Healthcare (PervasiveHealth), Munchen, Germany, 22–25 March 2010. [Google Scholar]
- Asimo. Available online: http://www.asimo.pl/roboty.php (accessed on 3 August 2018).
- Pollack, M.E.; Brown, L.; Colbry, D.; Orosz, C.; Peintner, B.; Ramakrishnan, S.; Roy, N. Pearl: A mobile robotic assistant for the elderly. Paper presented at the AAAI Workshop on Automation as Eldercare, Edmonton, AB, Canada, 29 July 2002. [Google Scholar]
- TWENDY-ONE. Available online: http://twendyone.com/concept_e.html (accessed on 3 August 2018).
- Lazzeri, N.; Mazzei, D.; Ben Moussa, M.; Magnenat-Thalmann, N.; De Ross, D. The influence of dynamics and speech on understanding humanoid facial expressions. Int. J. Adv. Robot. Syst. 2018. [Google Scholar] [CrossRef]
- Chen, C.-F.; Xu, X.; Arpan, L. Between the technology acceptance model and sustainable energy technology acceptance model: Investigating smart meter acceptance in the United States. Energy Res. Soc. Sci. 2017, 25, 93–104. [Google Scholar] [CrossRef]
- Baganzi, R.; Lau, A.K.W. Examining Trust and Risk in Mobile Money Acceptance in Uganda. Sustainability 2017, 9, 2233. [Google Scholar] [CrossRef]
- Kikulwe, E.M.; Fischer, E.; Qaim, M. Mobile Money, Smallholder Farmers, and Household Welfare in Kenya. PLoS ONE 2014, 9. [Google Scholar] [CrossRef] [PubMed]
- GSMA (Global System for Mobile Association). The Mobile Economy 2017; Global System for Mobile Association: London, UK, 2017. [Google Scholar]
- Radziszewski, P.; Nazarko, J.; Vilutiene, T.; Dębkowska, K.; Ejdys, J.; Gudanowska, A.; Halicka, K.; Kilon, J.; Kononiuk, A.; Kowalski, K.J.; et al. Future trends in road pavement technologies development in the context of environmental protection. Baltic J. Road Bridge Eng. 2016, 11, 160–168. [Google Scholar] [CrossRef]
- Syrdal, D.S.; Nomura, T.; Dautenhahn, K. The Frankenstein Syndrome Questionnaire–Results from a Quantitative Cross-Cultural Survey. In Social Robotics. Book Series: Lecture Notes in Artificial Intelligence; Springer: Cham, Switzerland, 2013; Volume 8239, pp. 270–279. [Google Scholar]
- Deligianis, C.; Stanton, C.; McGarty, C.; Stevens, C.J. The Impact of Intergroup Bias on Trust and Approach Behaviour towards a Humanoid Robot. J. Hum.-Robot Interact. 2017, 6, 4–20. [Google Scholar] [CrossRef]
- Hancock, P.A.; Billings, D.R.; Schaefer, K.E.; Chen, J.Y.; Visser, E.J.D.; Parasuraman, R. A meta-analysis of factors affecting trust in human-robot interaction. Hum. Factors 2011, 53, 517–527. [Google Scholar] [CrossRef] [PubMed]
- Heerink, M.; Kröse, B.; Evers, V.; Wielinga, B. Assessing Acceptance of Assistive Social Agent Technology by Older Adults: The Almere Model. Int. J. Soc. Robot. 2010, 2, 361–375. [Google Scholar] [CrossRef]
- Torta, E.; Werner, F.; Johnson, D.O.; Juola, J.F.; Cuijpers, R.H.; Bazzani, M.; Oberzaucher, J.; Lemberger, J.; Lewy, H.; Bregman, J. Evaluation of Small Socially-Assistive Humanoid Robot in Intelligent Homes for the Care of the Elderly. J. Intell. Robot. Syst. 2014, 76, 57–71. [Google Scholar] [CrossRef]
- Hiltunen, E.; Hiltunen, K. Technolife 2035. How Will Technology Change our Future; Cambridge Scholars Publishing: Cambridge, UK, 2015. [Google Scholar]
- Davis, F.D. A Technology Acceptance Model for Empirically Testing New and-User Information Systems: Theory and Results. Unpublished Doctoral Dissertation, MIT Sloan School of Management, Cambridge, MA, USA, 1985. [Google Scholar]
- Davis, F.D. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef]
- Ajzen, I.; Fishbein, M. Understanding Attitudes and Predicting Social Behavior; Prentice-Hall: Englewood Cliffs, NJ, USA, 1980. [Google Scholar]
- Venkatesh, V.; Davis, F.D. A Model of the Antecedents of Perceived Ease of Use: Development and Test. Decis. Sci. 1996, 27, 451–481. [Google Scholar] [CrossRef]
- Hudson, J.; Orviska, M.; Hunady, J. People’s Attitudes to Robots in Caring for the Elderly. Int. J. Soc. Robot. 2017, 9, 199–210. [Google Scholar] [CrossRef]
- Hegel, F. Classes of applications for social robots: A user study. In Proceedings of the 16th IEEE International Conference on Robot and Human Interactive Communication, Jeju, Korea, 26–29 August 2007. [Google Scholar]
- Hong, S.J.; Tam, K.Y. Understanding the adoption of multipurpose information appliances: The case of mobile data services? Inf. Syst. Res. 2006, 17, 162–179. [Google Scholar] [CrossRef]
- Li, F.; Zhang, S.; Jin, Y. Sustainability of University Technology Transfer: Mediating Effect of Inventor’s Technology Service. Sustainability 2018, 10, 2085. [Google Scholar] [CrossRef]
- Nomura, T.; Kanda, T.; Suzuki, T.; Kato, K. Age differences and images of robots Social survey in Japan. Interact. Stud. 2009, 10, 374–391. [Google Scholar] [CrossRef]
- Mitzner, T.L.; Boron, J.B.; Fausset, C.B.; Adams, A.E.; Charness, N.; Czaja, S.J.; Dijkstra, K.; Fisk, A.D.; Rogers, W.A.; Sharit, J. Older adults talk technology: Technology usage and attitudes. Comput. Hum. Behav. 2010, 26, 1710–1721. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Heerink, H. Exploring the influence of age, gender, education and computer experience on robot acceptance by older adults. In Proceedings of the 6th ACM/IEEE International Conference on Human-Robot Interaction (HRI ’11), Lausanne, Switzerland, 6–9 March 2011; pp. 147–148. [Google Scholar]
- Mynatt, E.D.; Rogers, W.A. Developing technology to support the functional independence of older adults. Ageing Int. 2002, 27, 24–41. [Google Scholar] [CrossRef]
- Arras, K.O.; Cerqui, D. Do We Want to Share Our Lives and Bodies with Robots? A 2000-People Survey; Technical Report Nr. 0605-001; Autonomous Systems LabSwiss Federal Institute of Technology, EPFL: Lausanne, Switzerland, June 2005. [Google Scholar]
- van Dijk, J.A.G.M. Digital divide research, achievements and shortcomings. Poetics 2006, 34, 221–235. [Google Scholar] [CrossRef] [Green Version]
- Scopelliti, M.; Giuliani, M.V.; Fornara, F. Robots in a domestic setting: A psychological approach. Univ. Access Inf. Soc. 2005, 4, 146–155. [Google Scholar] [CrossRef]
- Ezer, N.; Fisk, A.; Rogers, W. Attitudinal and intentional acceptance of domestic robots by younger and older adults. In Universal Access in Human-Computer Interaction Intelligent and Ubiquitous Interaction Environments; Stephanidis, C., Ed.; Springer: Berlin, Germany, 2009. [Google Scholar]
- Cortellessa, G.; Scopelliti, M.; Tiberio, L.; Svedberg, G.K.; Loutfi, A.; Pecora, F. A cross-cultural evaluation of domestic assistive robots. In Proceedings of the AAAI Fall Symposium on AI in Eldercare: New Solutions to Old Problems, Arlington, TX, USA, 7–9 November 2008; pp. 24–31. [Google Scholar]
- Draper, H.; Sorell, T.; Bedaf, S.; Syrdal, D.S.; Gutierrez-Ruiz, C.; Duclos, A.; Amirabdollahian, F. Ethical dimensions of human-robot interactions in the care of older people: Insights from 21 focus groups convened in the UK, France and the Netherlands. In 6th International Conference Social Robotics; Beetz, M., Johnston, B., Williams, M.A., Eds.; Springer International Publishing: Cham, Switzerland; Heidelberg, Germany; New York, NY, USA; Dordrecht, The Netherlands; London, UK, 2014; pp. 135–145. [Google Scholar]
- Solis, J.; Takanishi, A. Recent Trends in Humanoid Robotics Research: Scientific Background, Applications, and Implications. Account. Res. 2010, 17, 278–298. [Google Scholar] [CrossRef] [PubMed]
- Van der Plas, A.; Smits, M.; Wehrmann, C. Beyond speculative robot ethics: A vision assessment study on the future of the robotic caretaker. Account. Res. 2010, 17, 299–315. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ishihara, K.; Fukushi, T. Introduction: Roboethics as an Emerging Field of Ethics of Technology. Account. Res. 2010, 17, 273–277. [Google Scholar] [CrossRef] [PubMed]
- Giger, J.-C.; Piçarra, N. Who wants to work with Social Robots? Using the Theory of Reasoned Action and the Theory of Planned Behavior to Predict Intention to work with Social Robots. In Proceedings of the Conference: II International Congress Interdisciplinarity in Social and Human Sciences, Research Centre for Spatial and Organizational Dynamics University of Algarve, Faro, Portugal, 11–12 May 2017. [Google Scholar]
- Chen, N.-H.; Huang, S.C.-T. Domestic Technology Adoption: Comparison of Innovation Adoption Models and Moderators. Hum. Factors Ergon. Manuf. Serv. Ind. 2016, 26, 177–190. [Google Scholar] [CrossRef]
- Czaja, S.J.; Charness, N.; Fisk, A.D.; Hertzog, C.; Nair, S.N.; Rogers, W.A.; Sharit, J. Factors predicting the use of technology: Findings from the Center for Research and Education on Aging and Technology Enhancement (CREATE). Psychol. Aging 2006, 21, 33–352. [Google Scholar] [CrossRef] [PubMed]
- Sun, H.; Zhang, P. The role of moderating factors in user technology acceptance. Int. J. Hum. Comput. Stud. 2006, 64, 53–78. [Google Scholar] [CrossRef] [Green Version]
- Iacobucci, D. Structural equations modeling: Fit Indices, sample size, and advanced topics. J. Consum. Psychol. 2010, 20, 90–98. [Google Scholar] [CrossRef]
- Bentler, P.M.; Chou, C.P. Practical issues in structural modelling. Sociol. Methods Res. 1987, 16, 78–117. [Google Scholar] [CrossRef]
- Bollen, K.A. Structural Equations with Latent Variables; John Wiley and Sons: New York, NY, USA, 1989. [Google Scholar]
- Gaudiello, I.; Zibetti, E.; Lefort, S.; Chetouani, M.; Ivaldi, S. Trust as indicator of robot functional and social acceptance. An experimental study on user conformation to iCub answers. Comput. Hum. Behav. 2016, 61, 633–655. [Google Scholar] [CrossRef] [Green Version]
- Belanche, D.; Casaló, L.V.; Flavián, C. Integrating trust and personal values into the Technology Acceptance Model: The case of e-government services adoption. Cuadernos de Economía y Dirección de la Empresa 2012, 15, 192–204. [Google Scholar] [CrossRef]
- Huijts, N.M.A.; Molin, E.J.E.; Steg, L. Psychological factors influencing sustainable energy technology acceptance: A review-based comprehensive framework. Renew. Sustain. Energy Rev. 2012, 16, 525–531. [Google Scholar] [CrossRef]
- Turja, T.; Van Aerschot, L.; Särkikoski, T.; Oksanen, A. Finnish healthcare professionals’ attitudes towards robots: Reflections on a population sample. Nurs. Open 2018, 5, 300–309. [Google Scholar] [CrossRef] [PubMed]
- Tung, FW. Influence of Gender and Age on the Attitudes of Children towards Humanoid Robots. Hum.-Comput. Interact. 2011, 6764, 637–646. [Google Scholar] [CrossRef]
Figure 1.
Conceptual model.

Figure 2.
Assessment of a construct shaping an attitude toward the use of humanoids (means).

Figure 3.
Model for the measurement of an attitude toward humanoids.

Figure 4.
Attitude toward humanoids in gender groups.

Figure 5.
Attitude toward humanoids in four age groups.


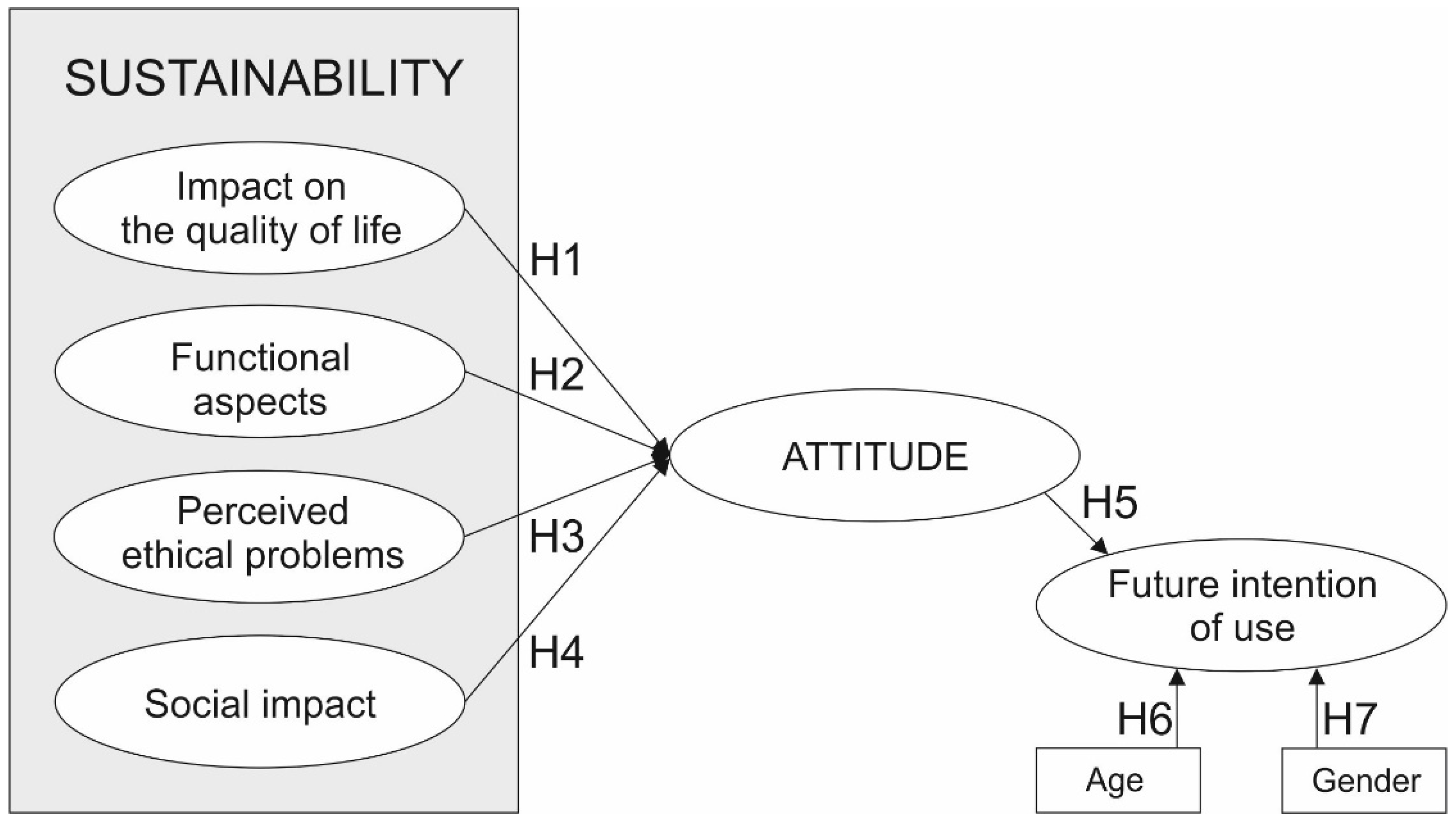{kind=link}
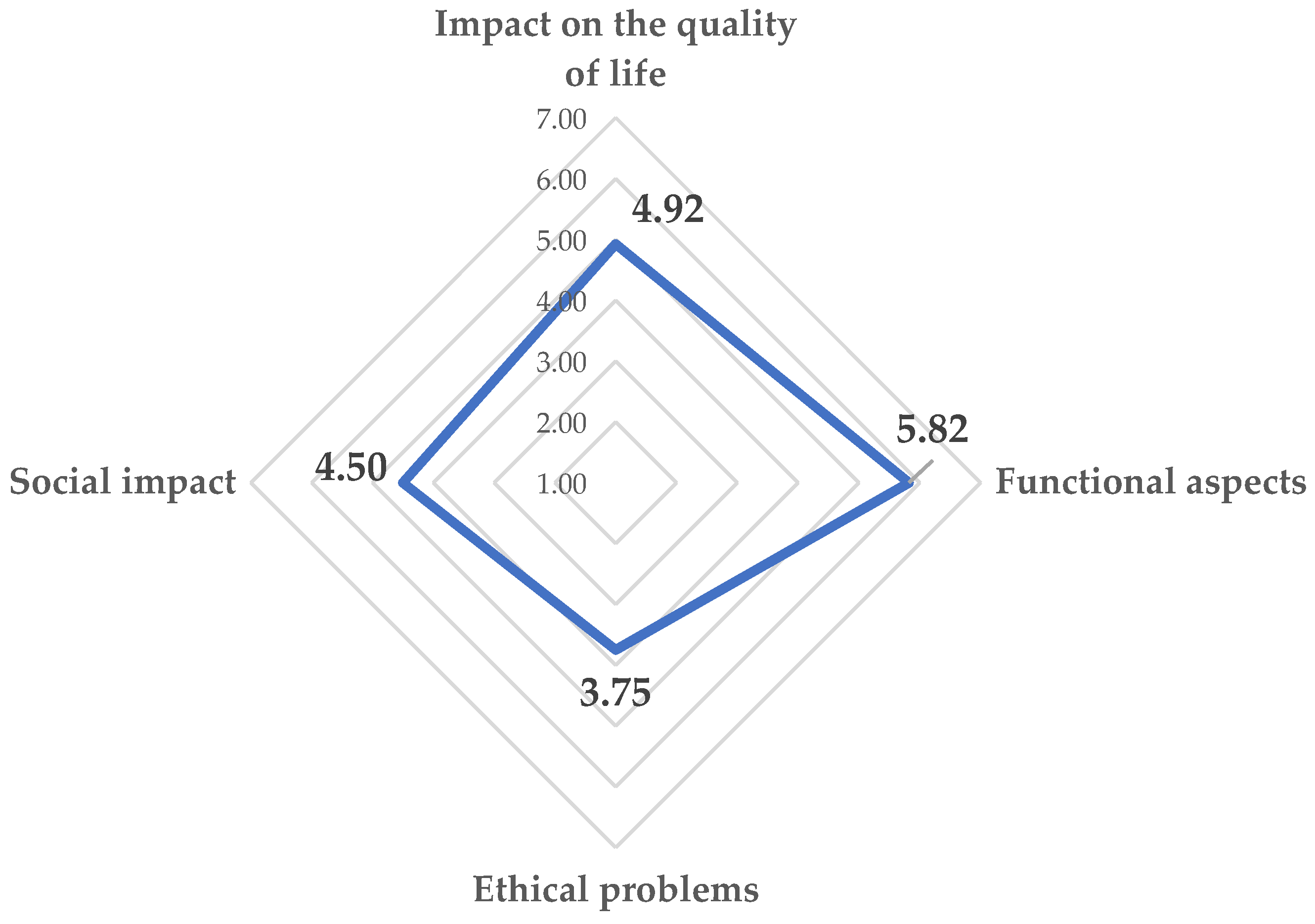{kind=link}
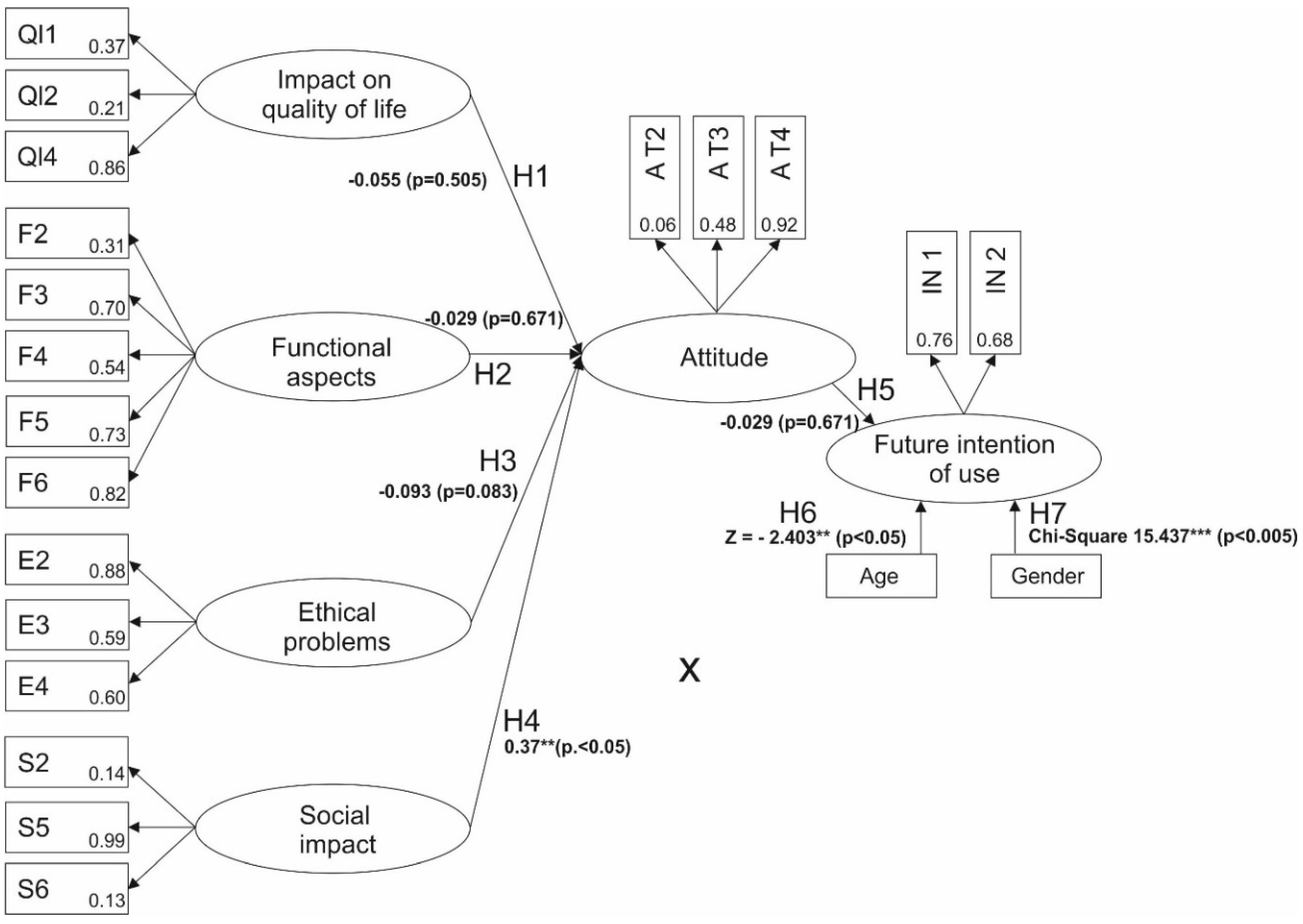{kind=link}
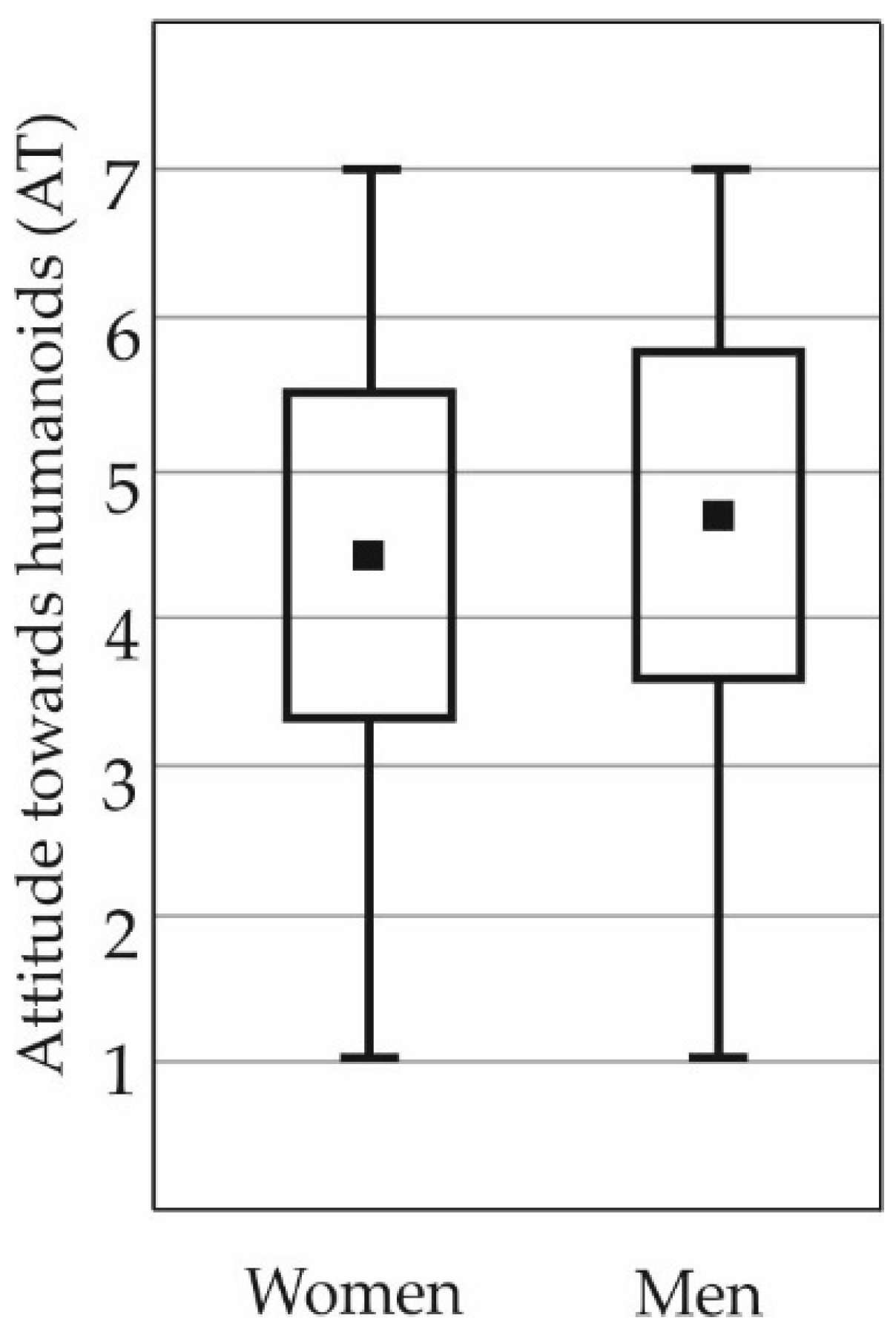{kind=link}
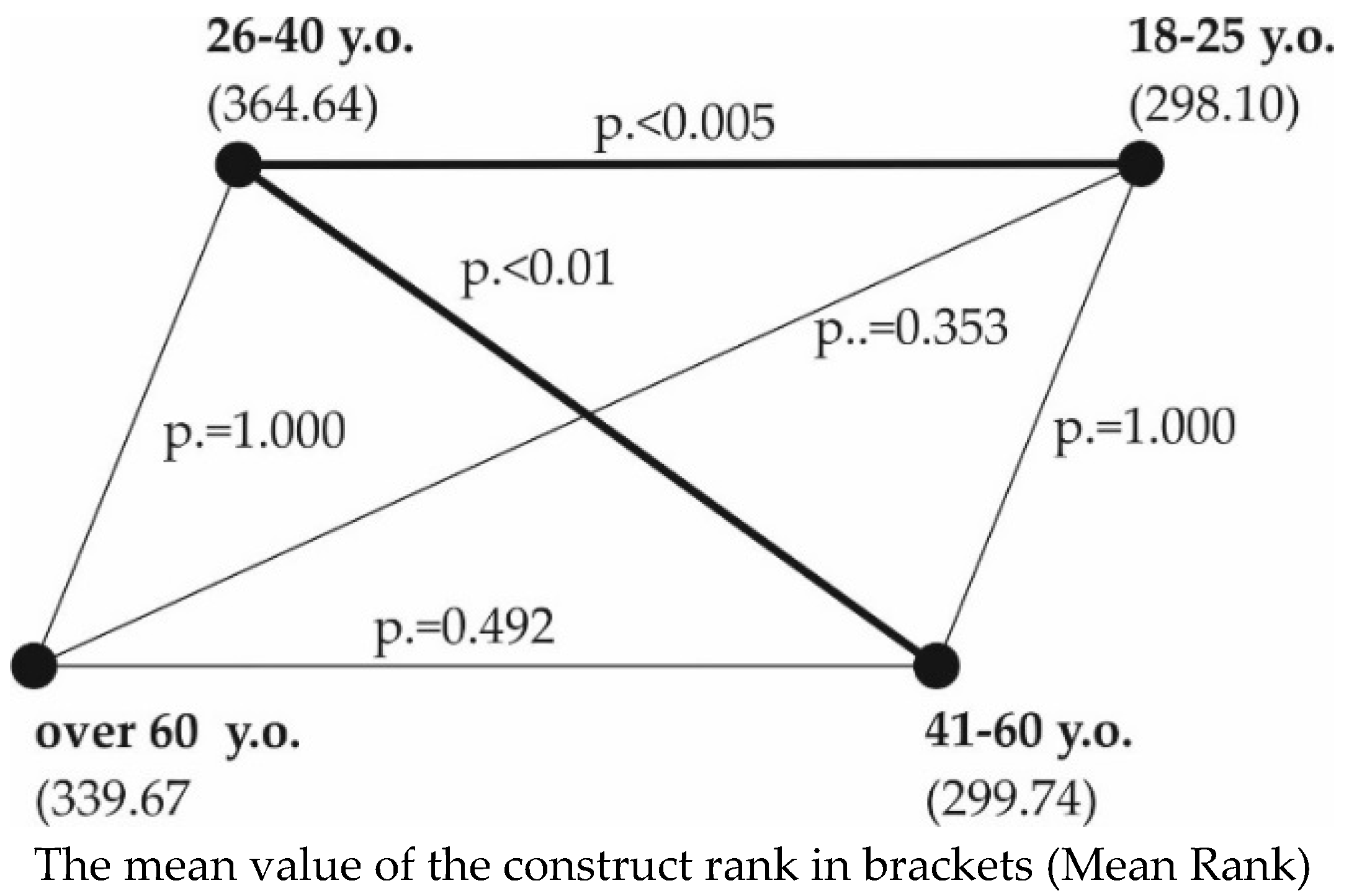{kind=link}
Table 1.
Population by age group (in percentages) (Source: [1]).
Table 1.
Population by age group (in percentages) (Source: [1]).
| 2030 | 2050 | 2080 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 0–14 | 15–64 | 65+ | 0–14 | 15–64 | 65+ | 0–14 | 15–64 | 65+ | |
| World | 23.68 | 64.66 | 11.66 | 21.31 | 62.86 | 15.82 | 18.97 | 60.98 | 20.05 |
| Europe | 15.15 | 61.77 | 23.08 | 14.99 | 57.16 | 27.85 | 15.10 | 56.23 | 28.68 |
| Japan | 12.21 | 57.49 | 30.30 | 12.55 | 51.07 | 36.37 | 13.32 | 51.48 | 35.20 |
| Poland | 15.40 | 18.40 | 23.20 | 12.20 | 56.16 | 31.64 | 12.78 | 51.97 | 35.25 |
Table 2.
Examples of robots and their functionality.
| The Name of the Robot, Producer/Country | Basic Features of the Robot | Basic Aims of Using the Robot |
|---|---|---|
| ANIMALOIDS, ZOOMORPHIC ROBOTS | ||
| Aibo Sony/Japan | looks like a dog; potentially enhances the quality of life of older people and people with disabilities by playing with them; eliminates stress felt by older people [38] | (1) pleasantly spent time by older people (S+E) (2) the use of robots is easy and intuitive (F) |
| NeCoRo Omron Corporation/Japan | looks like a cat, soft to touch; responds to movement and emotions of older people; responds to human movements and emotions; has feelings and desires, and a personality that adjusts to its owner; remembers and acknowledges its name when called; synthetic fur gives it a feline appearance, so it feels natural to treat it like a cat, stroking and hugging it; helps improve the communication among older people and makes the environment calmer, easier, gentler, and more comfortable [39] | (1) the use of robots improves the comfort of older people (QL) (2) the use of robots is easy and intuitive (F) (3) the ability to interact or communicate (F) (4) an innovative solution that is in demand (F) |
| DOLL ROBOT | ||
| Babyloid Chukyo U./Japan | A baby-type robot designed for caretaking of an older person requiring nursing care; can cry and blush, has unpredictable behavior, making an older person less depressed; designed to help ease depression among older adults by offering them companionship [39] | (1) pleasantly spent time by older people (S) (2) the use of robots is easy and intuitive (F) |
| HUMANOID ROBOT | ||
| PaPeRo NEC/United States | used for communication; recognizes speech and speech synthesis; recognizes faces; responds to touch; can understand several people talking to it at the same time, can search the internet to find answers to questions asked; is used to improve the well-being of older adults [40] | (1) the use of robots can improve the comfort of older people (QL) (2) the use of robots is easy and intuitive (F) (3) the ability to interact or communicate (F) (4) an innovative solution that is in demand (F) (5) the use of robots will bring measurable social benefits (S) (6) robots do not pose a threat to interpersonal relations (S+E) (7) pleasantly spent time by older people (S) |
| ASIMO Honda/Japan | will take over some of the home duties of older adults; recognizes moving people and their faces; can follow the movements of people; comes when called and can recognize dozens of phrases; can also recognize voices and respond to specific instructions; ensures greater independence of an older adult [41] | |
| Pearl CMU United States | a robot that helps older people with their daily routines; reminds older people about their daily activities such as eating, drinking, taking medicine, or using the bathroom; helps older people navigate their environments [42] | (1) the use of robots will improve the quality of the existing care system for older people (QL) (2) source of additional benefits for users: 24-h care, a sense of security (QL) (3) the use of robots will bring tangible benefits to human health and the quality of human life (QL) (4) robots can perform difficult tasks, i.e., lift people or help them move (F); (5) the ability to remind older people to take their medication (F) (6) the ability to inform family members about the health status of older people (F); (7) call for help on behalf of older people (F) (8) the use of robots will improve the safety of older people (S) (9) special importance in the care of lonely people (S+E) |
| Twendy-One Waseda U./Japan | can carry out limited conversations and uses the built-in camera to locate the indicated objects; can say hello, bring breakfast on a tray, wish one a tasty meal; can help one get out of bed and give a dress or a cane [43] | |
| Pepper Aldebaran Robotics/France | can recognize older people and is able to have a conversation with them; can react to emotions; moves and lives autonomously; can react to moods, using intuitive interfaces like voice, touch, and emotions; used to provide company to older people, but also to motivate them to walk; provides assistance while walking [21] | |
Legend: S—a social aspect; T—a functional aspect; E—ethical problems, QL—the quality of life.
Table 3.
Reduction of variables after confirmatory factor analysis (CFA).
| Constructs and Items | Mean (M) | Factor Loading Before CFA | Factor Loading After CFA | Cronbach’s α Before and After (in Brackets) CFA |
|---|---|---|---|---|
| Impact on the Quality of Life | ||||
| QL1: The use of humanoids in the care of older adults will significantly improve the quality of the existing care system. | 4.70 | 0.836 | 0.810 | 0.912 (0.898) |
| QL2: The use of humanoids in the care of older adults will be a source of additional benefits (24-h attendance, 24-h care, and a sense of security), which are otherwise unavailable. | 5.08 | 0.839 | 0.858 | |
| QL3: The widespread use of humanoids in the care of older adults will bring measurable benefits to human health and the quality of life. | 4.43 | 0.846 | ** | |
| QL4: The use of humanoids in the care of older adults can significantly improve their comfort. | 4.98 | 0.884 | 0.881 | |
| Functional Aspects | ||||
| F1: The use of humanoids should be easy and intuitive. | 6.40 | 0.501 | * | 0.867 (0.890) |
| F2: Humanoids will be able to perform difficult tasks in the care of an older person (e.g., lifting people and helping them move). | 5.57 | 0.627 | 0.587 | |
| F3: An important feature of a humanoid will be the ability to remind an older person about the time to take medications. | 6.02 | 0.863 | 0.854 | |
| F4: An important feature of a humanoid will be the ability to interact or communicate. | 5.39 | 0.787 | 0.824 | |
| F5: An important feature of a humanoid will be the ability to inform the family members about the health condition of the minded older adults. | 5.88 | 0.854 | 0.856 | |
| F6: An important feature of a humanoid will be the ability to call for help on behalf of an older person. | 6.26 | 0.853 | 0.884 | |
| F7: The use of a humanoid in the care of older adults is a very innovative solution that is in demand. | 4.52 | 0.511 | * | |
| Ethical Problems | ||||
| E1: Widespread use of humanoids in the care of older adults can cause moral dilemmas and doubts as to whether a humanoid could be entrusted with such care. | 5.26 | 0.354 | * | 0.702 (0.743) |
| E2: The use of humanoids in the care of older people may endanger the health or life of a user. | 3.67 | 0.846 | 0.881 | |
| E3: A humanoid may inadvertently harm an older person. | 4.80 | 0.689 | 0.631 | |
| E4: A humanoid can deliberately harm an older person. | 2.77 | 0.601 | 0.683 | |
| Social Impact | ||||
| S1: Widespread use of humanoids in the care of older adults will create new jobs. | 3.24 | 0.489 | * | 0.837 (0.842) |
| S2: Widespread use of humanoids in the care of older adults will bring measurable social benefits. | 4.49 | 0.817 | 0.796 | |
| S3: The use of humanoids in the care of older adults will improve the safety of older people. | 4.67 | 0.846 | ** | |
| S4: Humanoids may pose a threat to interpersonal relationships. | 3.14 | 0.339 | * | |
| S5: The use of humanoids in the care of older adults will contribute to a more pleasant time for older people. | 3.94 | 0.748 | 0.750 | |
| S6: The use of humanoids will be of particular importance in the care of the lonely people. | 5.08 | 0.839 | 0.851 | |
* Variable excluded from further analysis due to having a factor loading below 0.6; ** variable excluded from further analysis due to the standardized residual covariance being greater than 2.
Table 4.
Descriptive statistics and composite reliability for the attitude and intended use variables.
Table 4.
Descriptive statistics and composite reliability for the attitude and intended use variables.
| Constructs and Items | Mean (M) | Cronbach’s α before and after (in Brackets) CFA |
|---|---|---|
| Attitude | ||
| AT1: I believe that being in the presence of a humanoid can be pleasant *** | 3.84 | 0.824 (0.724) |
| AT2: I believe that I could learn how to use a humanoid if I needed it. | 6.21 | |
| AT3: In the presence of a humanoid, I would feel safe. | 4.21 | |
| AT4: Living with a humanoid could be nice and pleasant in old age. | 3.87 | |
| Future Intended Use | ||
| IN1: Would you be willing to use the help of a humanoid in the care of a member of your family? | 3.33 | 0.870 |
| IN2: Would you be willing to use the help of a humanoid in your own care? | 3.79 | |
*** Variable excluded from further analysis due to strong correlation with variable S5.
Table 5.
Correlation matrix (Spearman’s coefficient).
| Impact on the Quality of Life (IQ) | Functional Aspects (F) | Ethical Problems (E) | Social Impact (S) | Attitude (AT) | Future Intended Use (IN) | |
|---|---|---|---|---|---|---|
| Impact on the quality of life | 1 | 0.593 ** | −0.414 ** | 0.826 ** | 0.737 ** | 0.716 ** |
| Functional aspects | 0.593 ** | 1 | −0.271 ** | 0.637 ** | 0.606 ** | 0.483 ** |
| Ethical problems | −0.414 ** | −0.271 ** | 1 | −0.403 ** | −0.455 ** | −0.408 ** |
| Social impact | 0.826 ** | 0.637 ** | −0.403 ** | 1 | 0.781 ** | 0.686 ** |
| Attitude | 0.737 ** | 0.606 ** | −0.455 ** | 0.781 ** | 1 | 0.662 ** |
| Future intended use | 0.716 ** | 0.483 ** | −0.408 ** | 0.686 ** | 0.662** | 1 |
** Correlation is significant at the level of 0.01 (two-tailed).
Table 6.
Results of the test hypotheses.
| Relationship between Constructs | Estimate | Standard Error | Capability Ratio | p | Hypothesis Testing |
|---|---|---|---|---|---|
| H1: QL→AT | −0.034 | 0.050 | −0.666 | 0.505 | Reject |
| H2: F→AT | −0.018 | 0.042 | −0.425 | 0.671 | Reject |
| H3: E→AT | −0.045 | 0.026 | −1.733 | 0.083 | Reject |
| H4: S→AT | 1.496 | 0.642 | 2.330 | ** | Support |
| H5: AT→IN | 0.073 | 0.093 | 0.790 | 0.430 | Reject |
χ2 = 552.871; degrees of freedom (df) = 143; χ2/df = 3.866; p < 0.005; root-mean-square error of approximation (RMSEA) = 0.067; goodness-of-fit index (GFI) = 0.909; Hoelter = 200, p < 0.001; ** the adopted level of statistical significance was 0.05.
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ejdys, J.; Halicka, K. Sustainable Adaptation of New Technology—The Case of Humanoids Used for the Care of Older Adults. Sustainability 2018, 10, 3770. https://doi.org/10.3390/su10103770
AMA Style
Ejdys J, Halicka K. Sustainable Adaptation of New Technology—The Case of Humanoids Used for the Care of Older Adults. Sustainability. 2018; 10(10):3770. https://doi.org/10.3390/su10103770
Chicago/Turabian StyleEjdys, Joanna, and Katarzyna Halicka. 2018. "Sustainable Adaptation of New Technology—The Case of Humanoids Used for the Care of Older Adults" Sustainability 10, no. 10: 3770. https://doi.org/10.3390/su10103770
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.