Active Power Management of Virtual Power Plant under Penetration of Central Receiver Solar Thermal-Wind Using Butterfly Optimization Technique


 , and
, and
Abstract
:1. Introduction
- (a)
- The development of grid-integrated VPP in the presence of CRSTS, WTG, and EV and implementing it in MATLAB Simulation platform;
- (b)
- The application of available control strategy on interconnected microgrid in modified form for active power regulation of VPP model;
- (c)
- Considering communication delay in control system design and evaluations;
- (d)
- Use of a recent meta-heuristic optimization tool, namely BOA, for optimizing the control parameters and comparing the performance with GA, PSO, and SSA.
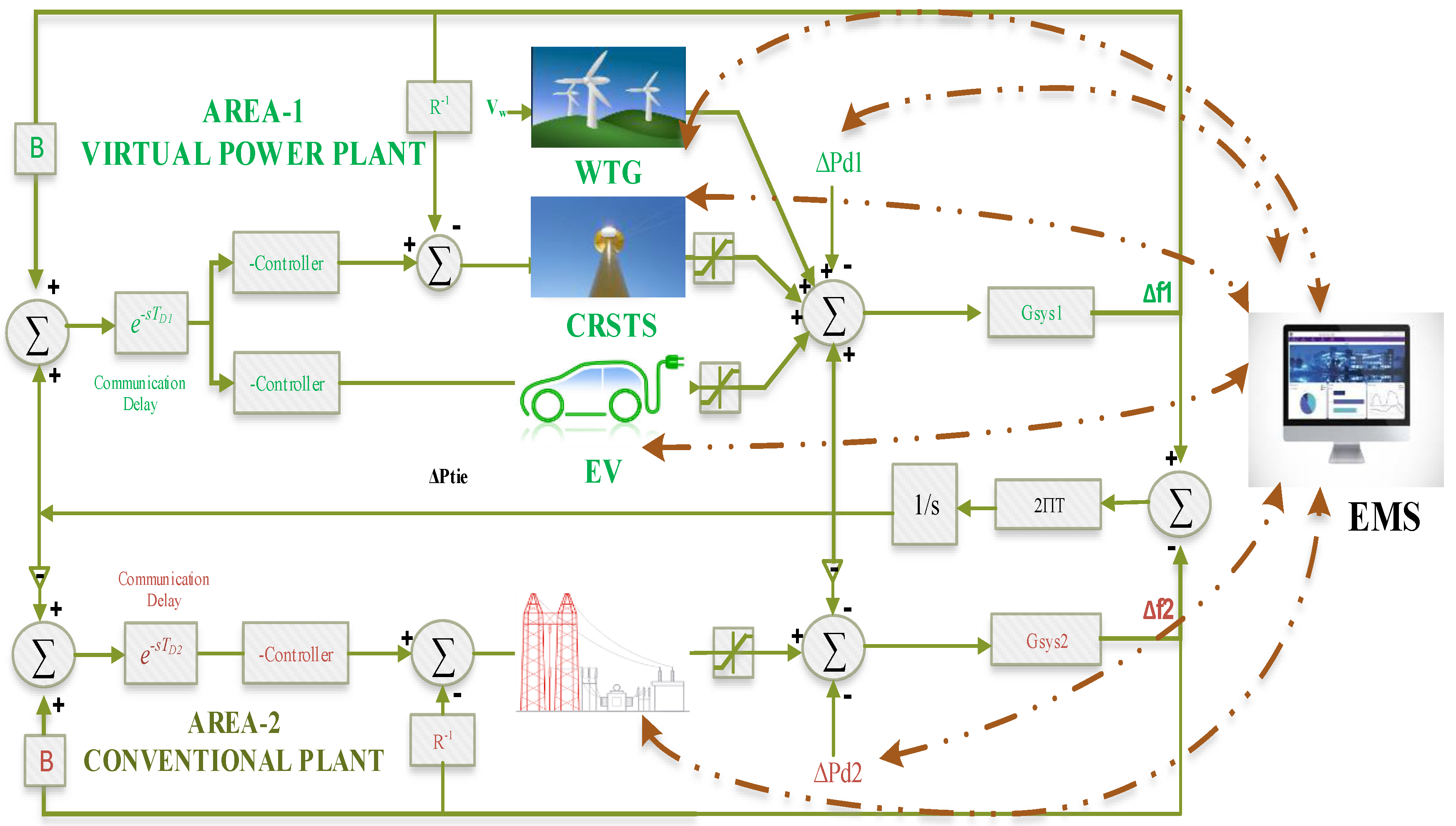
2. DER Modeling in VPP
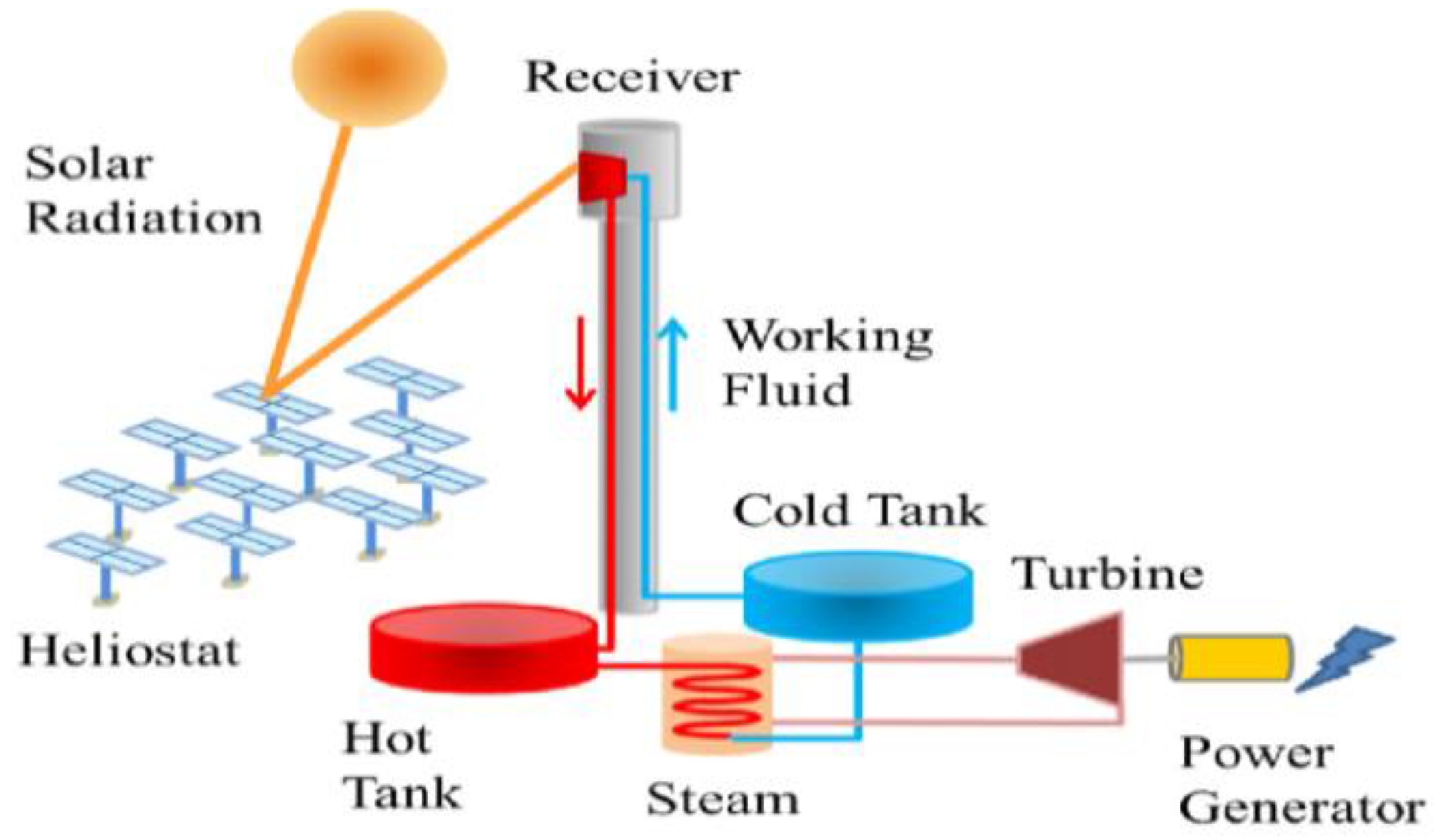
2.1. Central Receiver Solar Thermal System (CRSTS)
2.2. Wind Turbine Generator (WTG)
2.3. Electric Vehicle (EV)
2.4. Conventional Synchronous Generator
2.5. Information and Communication Technology (ICT)
3. Methodology
3.1. Formation of the Objective Function
3.2. Adopted Control Strategy
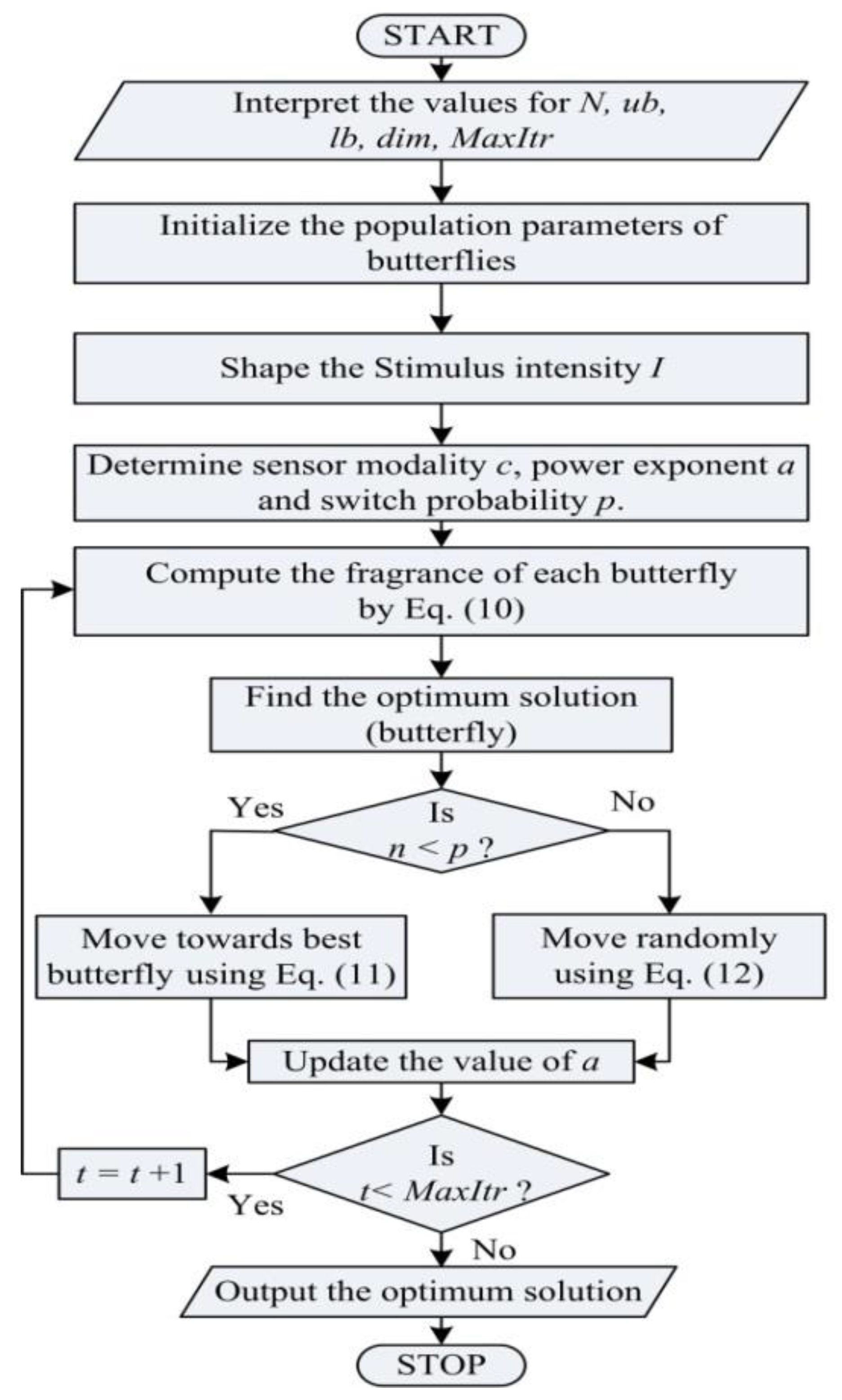
3.3. Overview of Butterfly Optimization Algorithm (BOA)
4. Simulated Results and Analysis
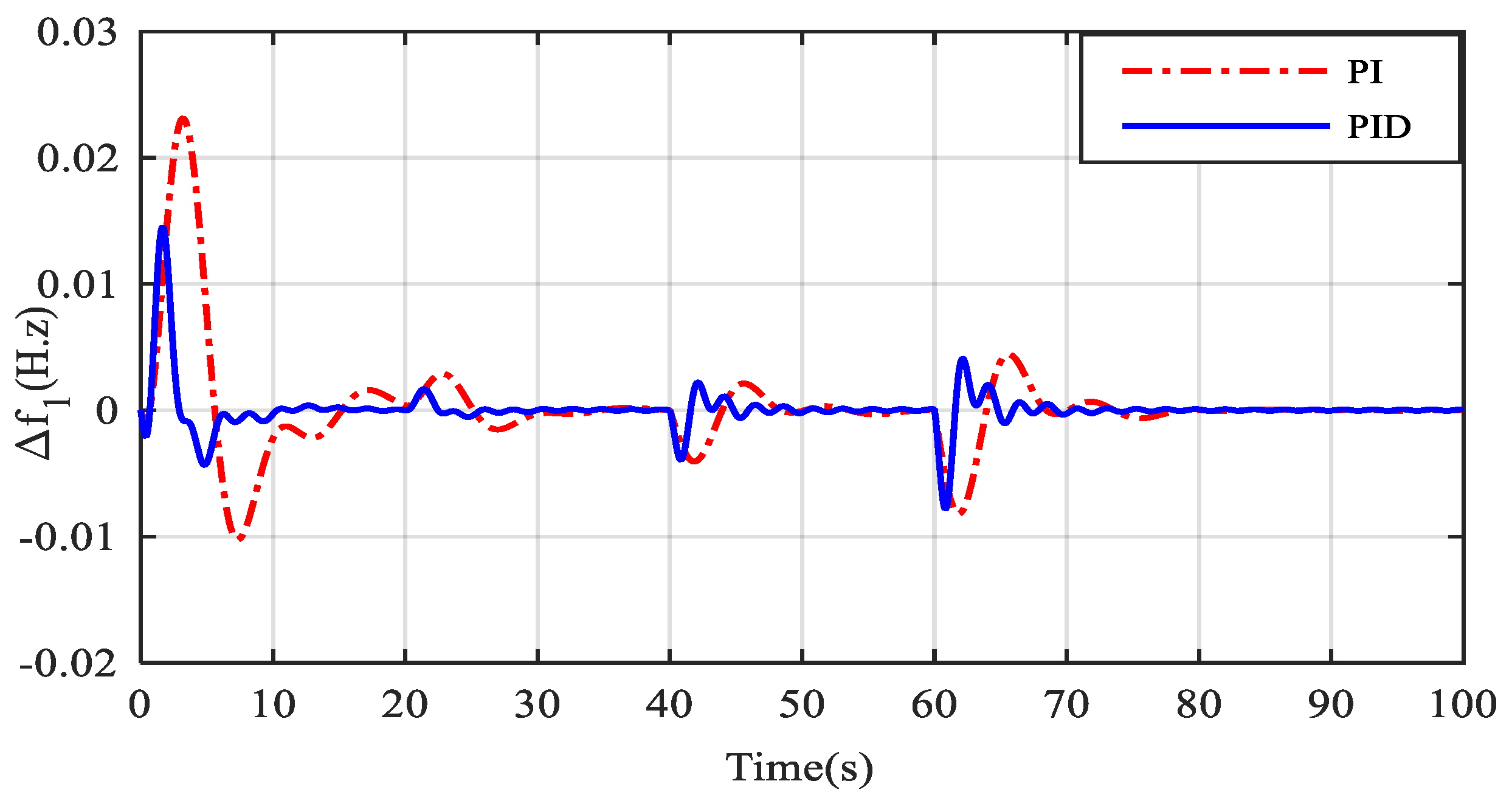
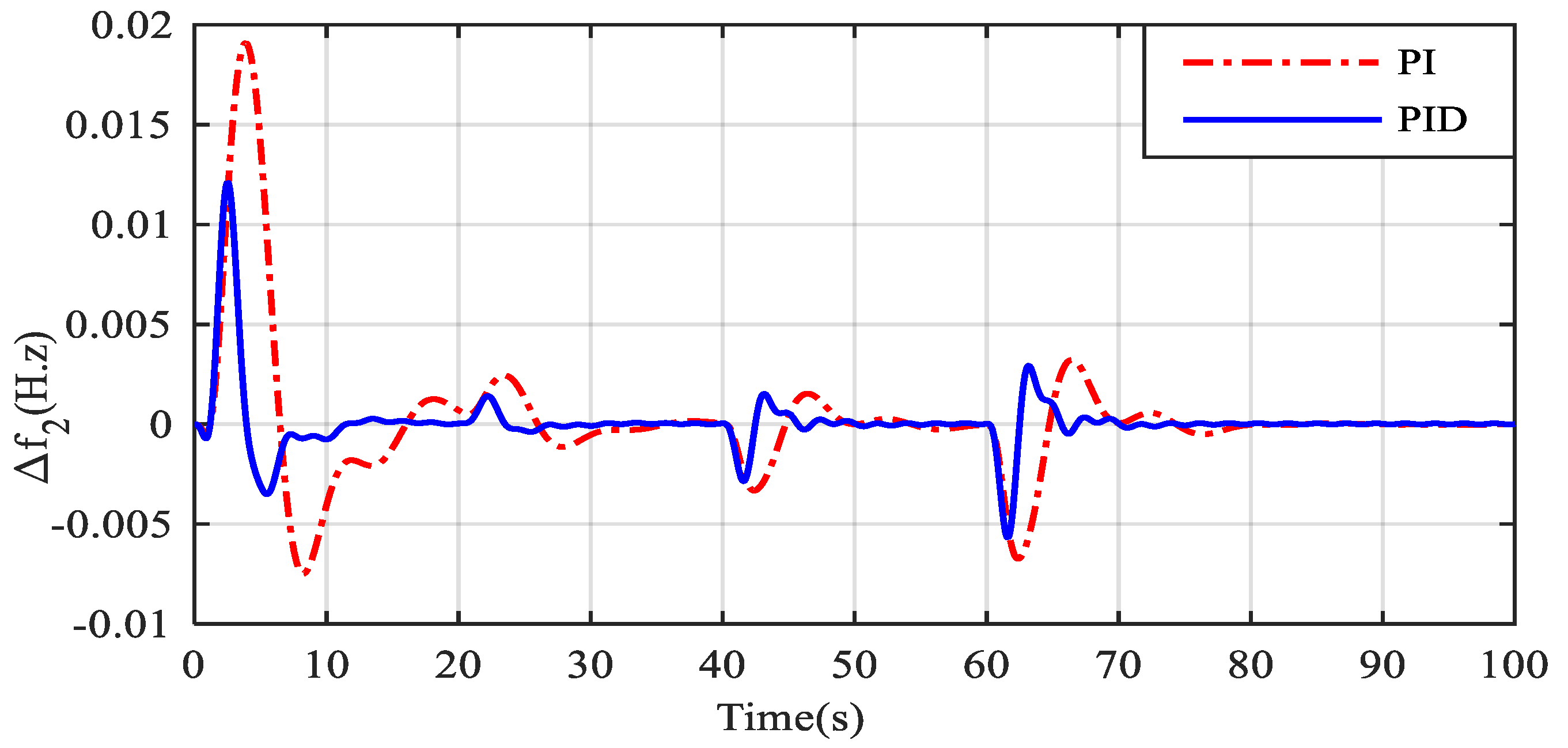
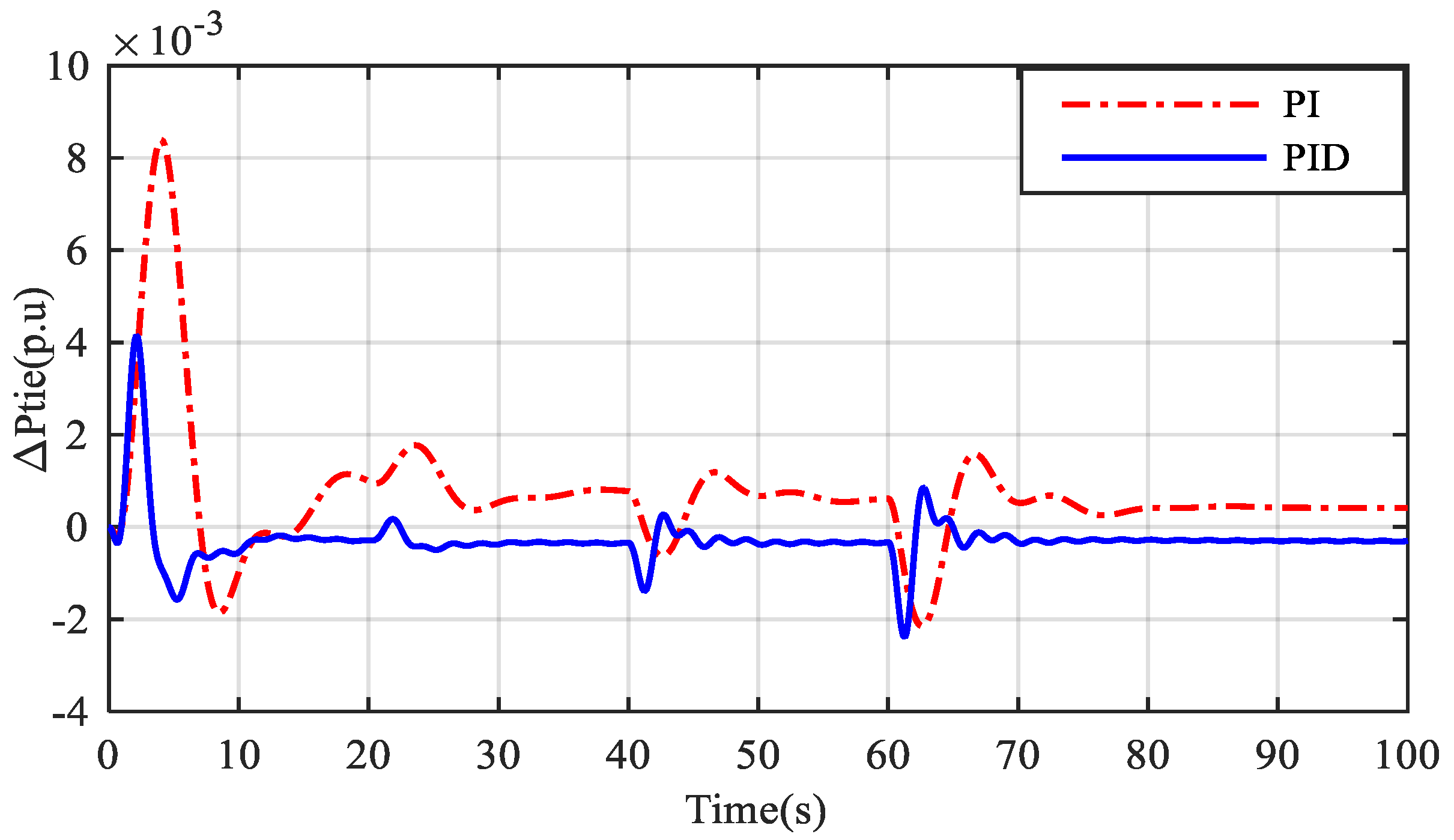
4.1. Time Domain Analysis of the VPP Model Employed with PI and PID
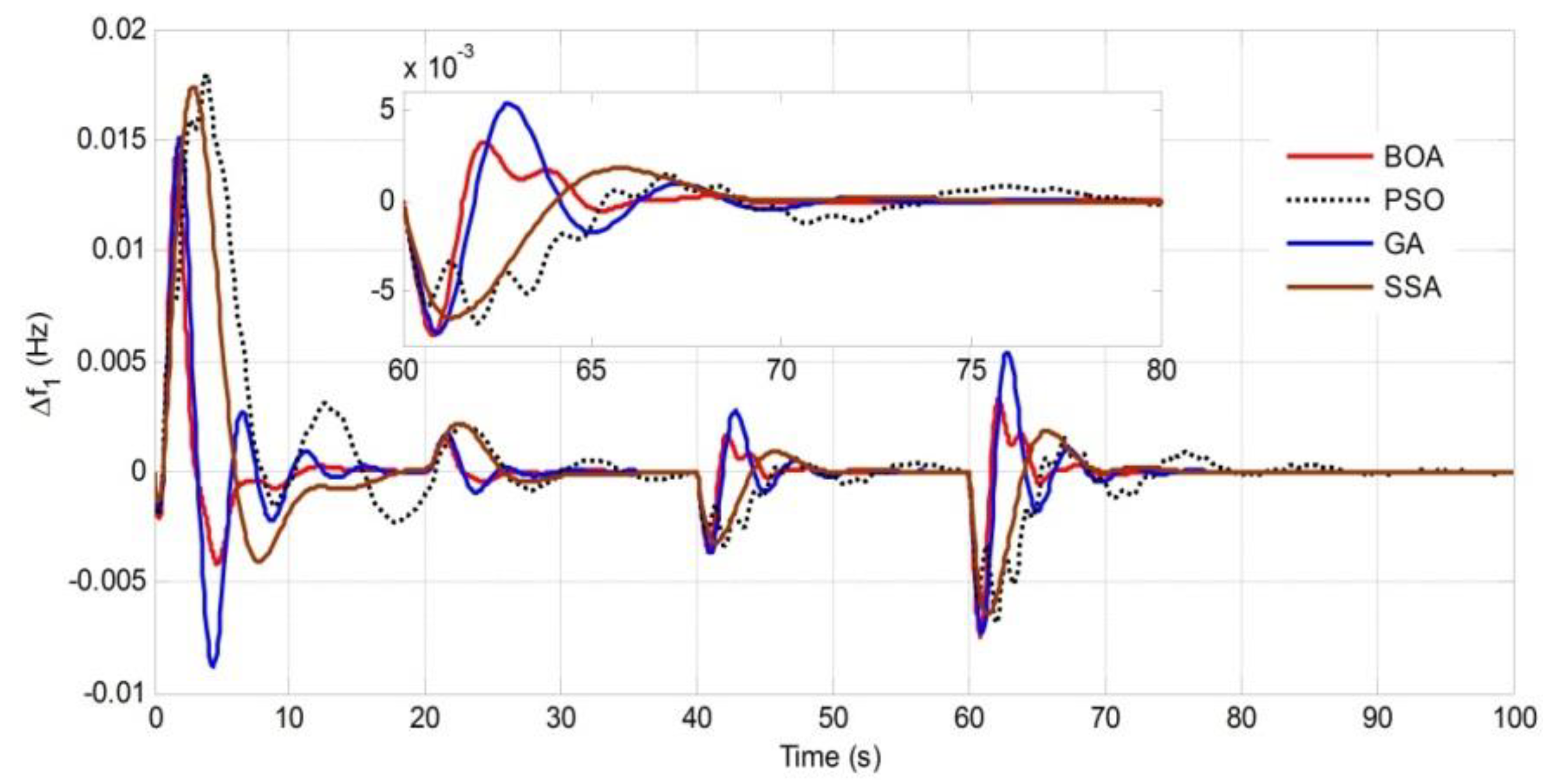
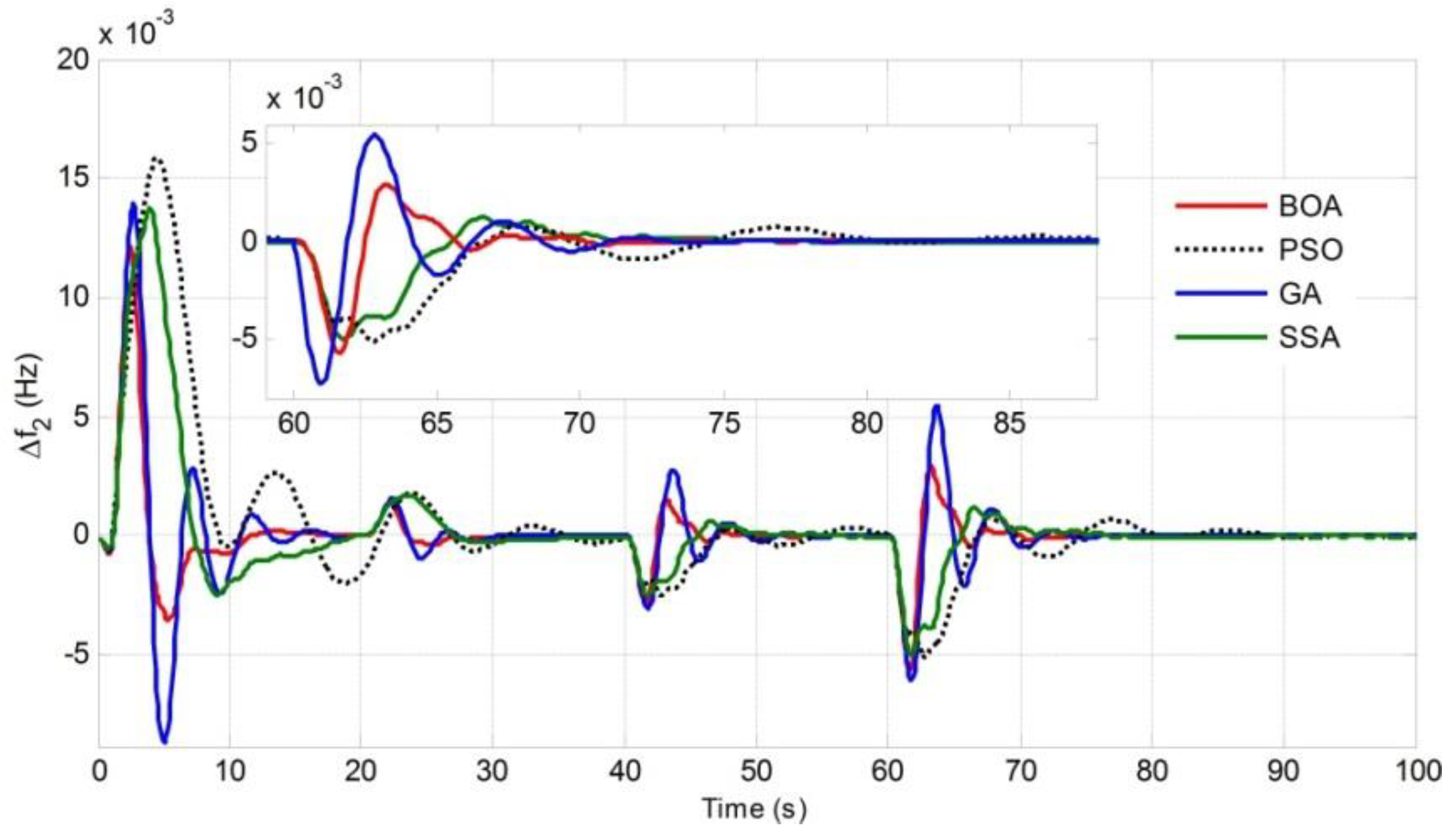
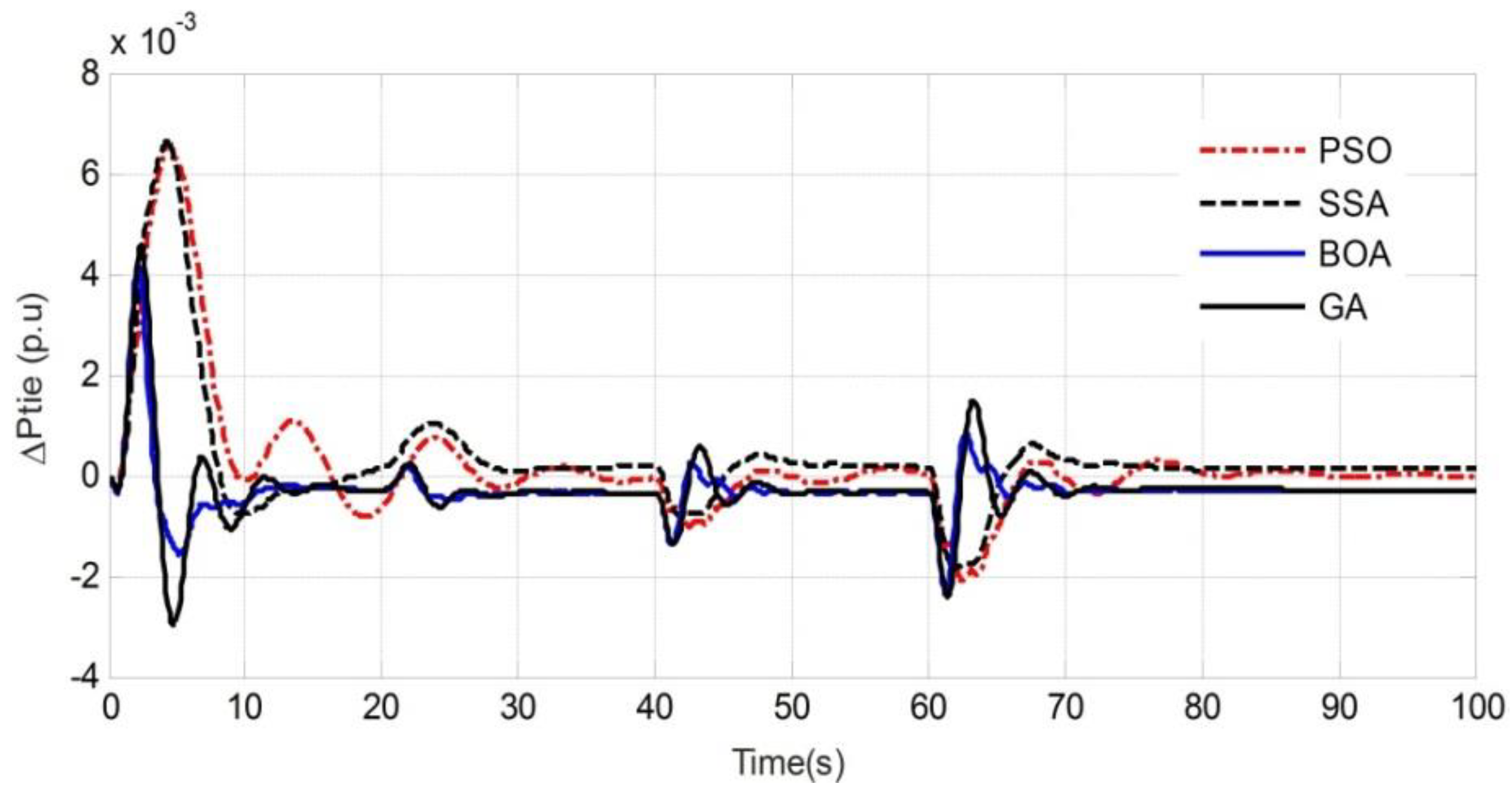
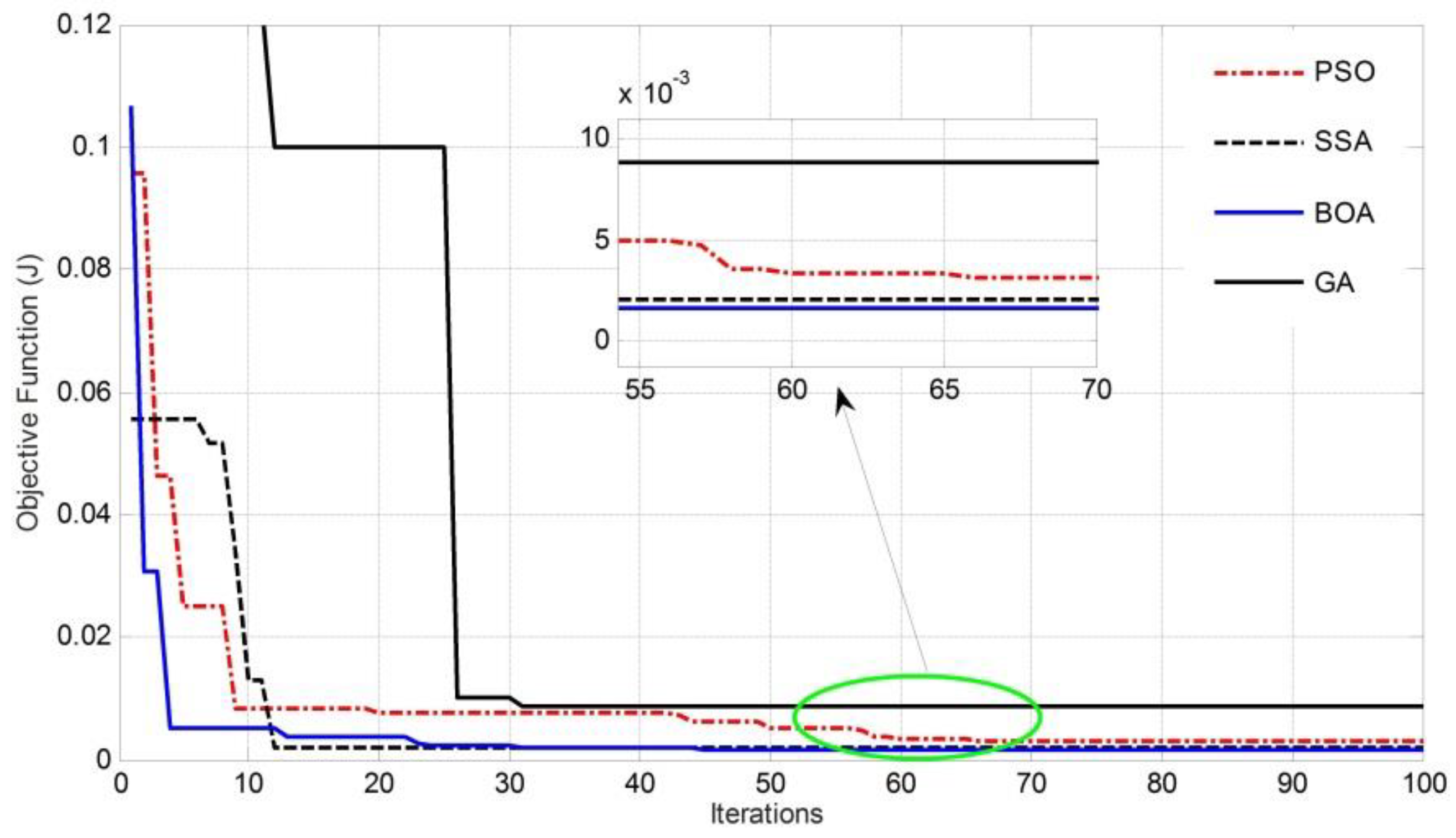
4.2. Time Domain Analysis for Optimization Algorithms GA, PSO, SSA, and BOA
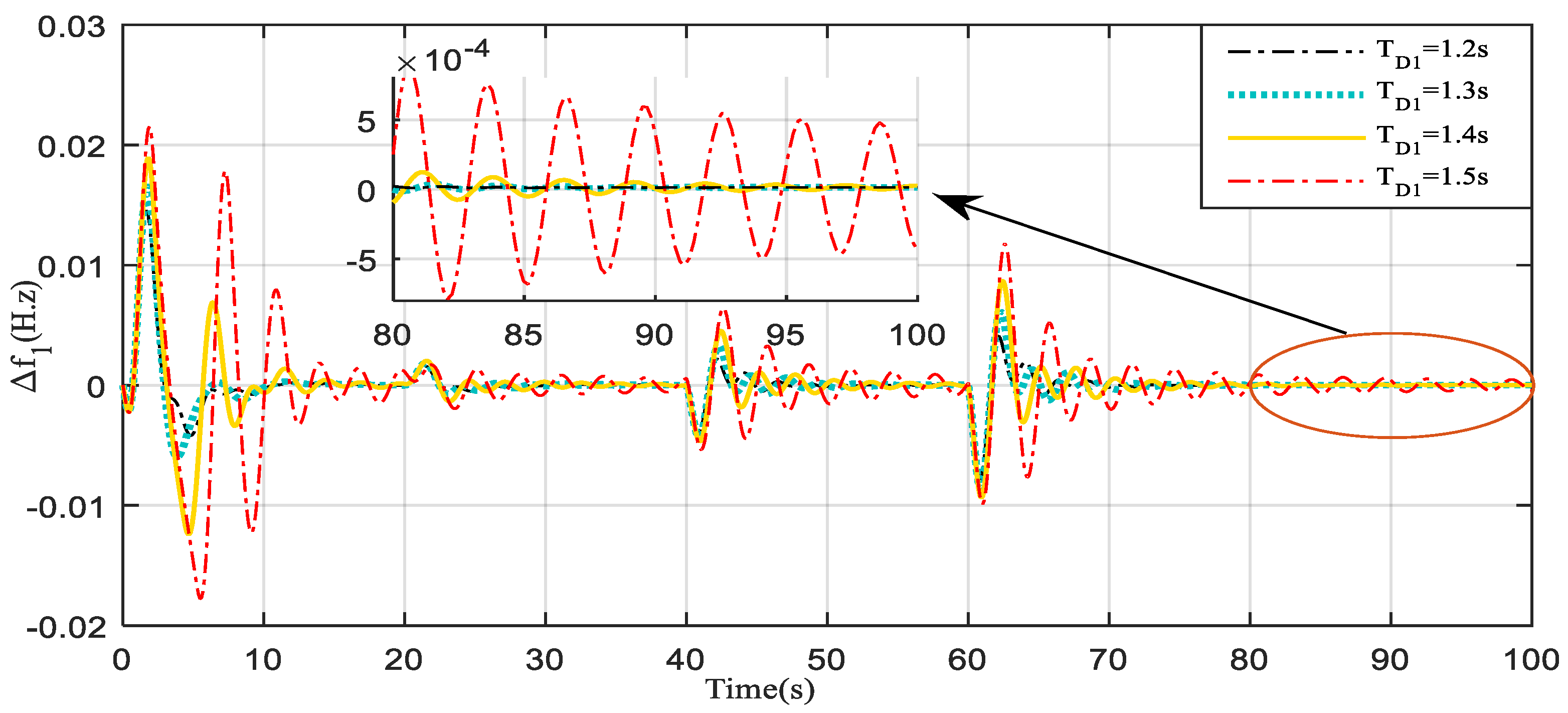
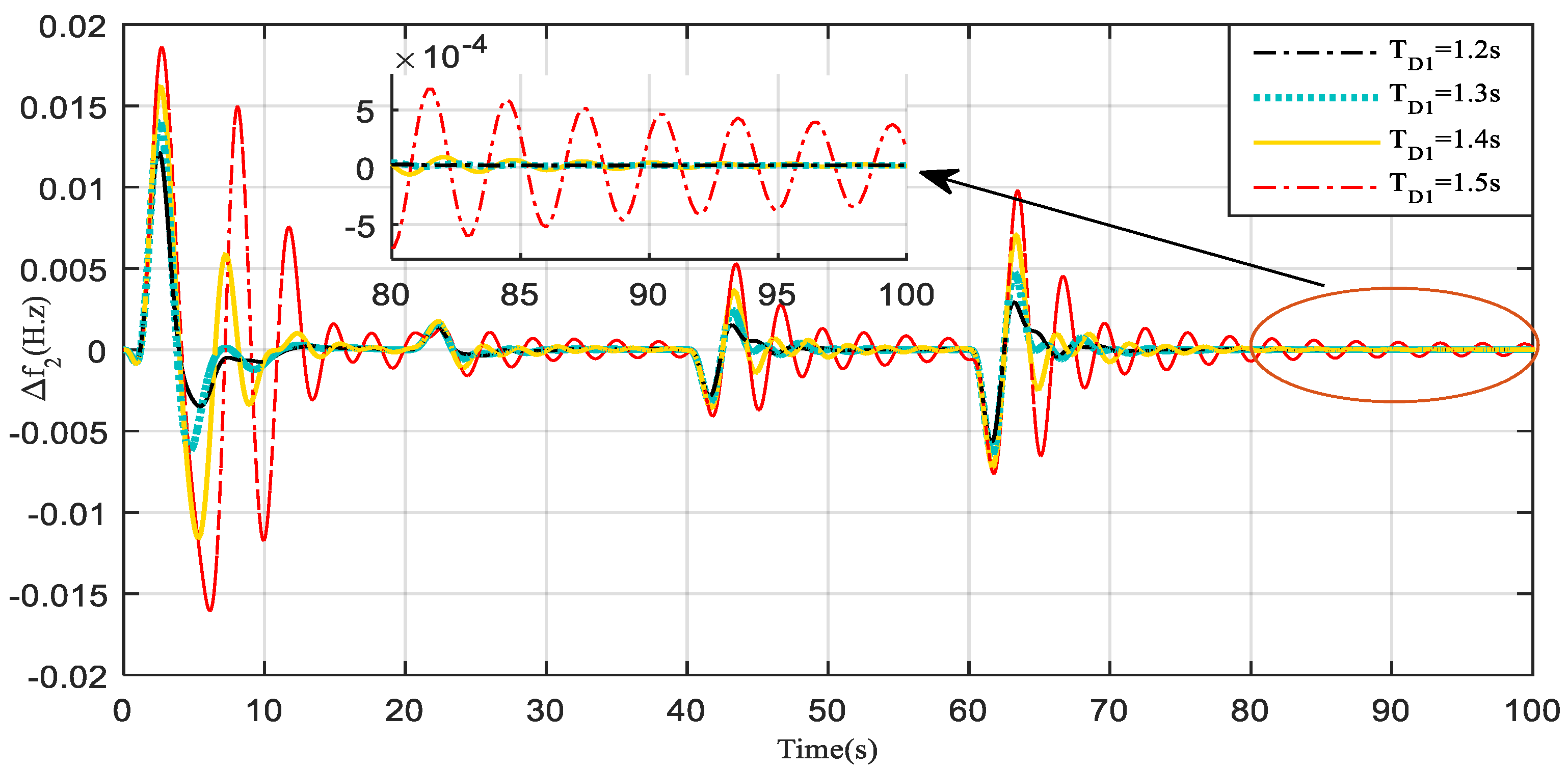
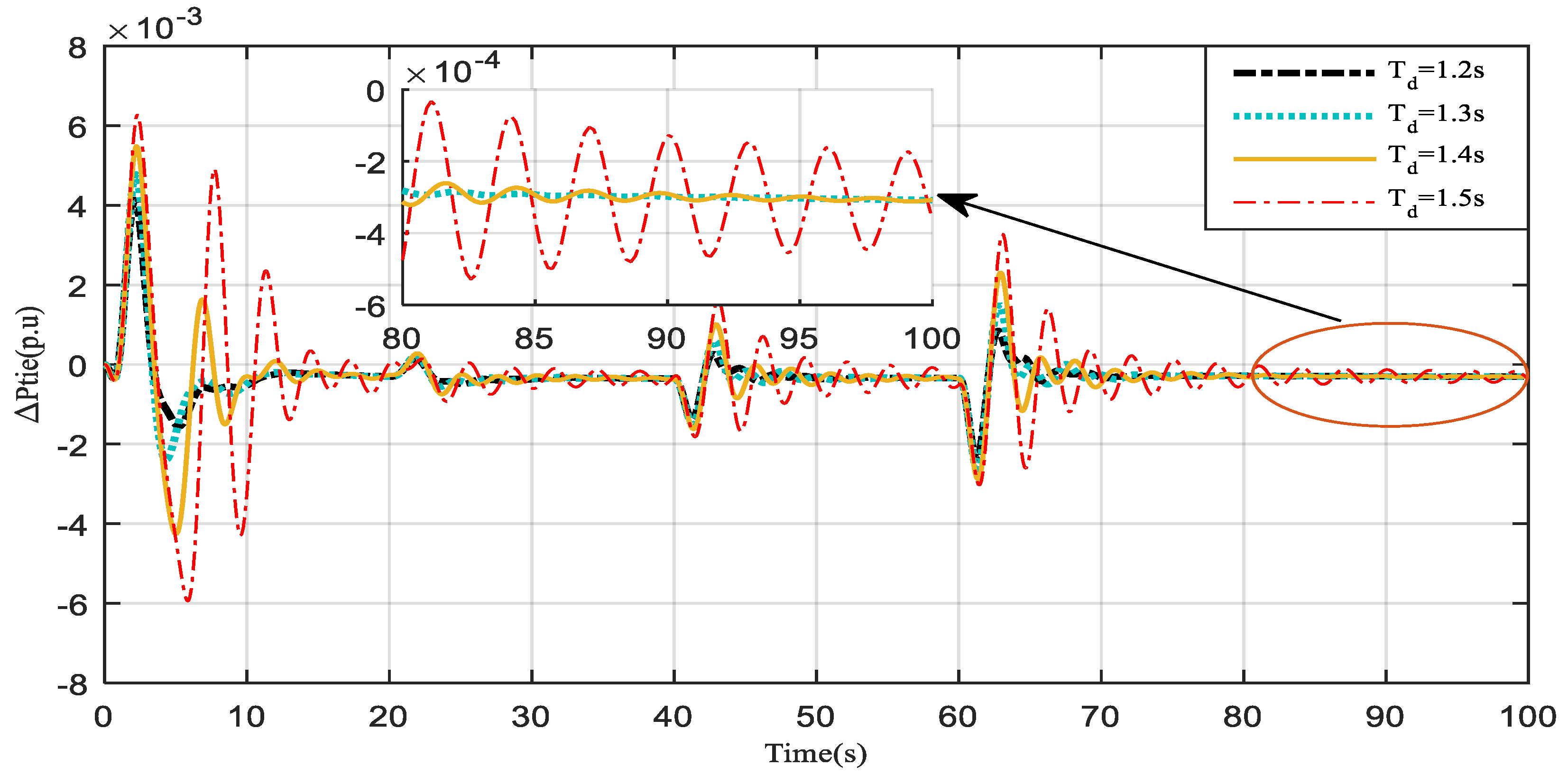
4.3. Time Domain Analysis of the VPP Model with Increasing Communication Delay (TD)
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| REs | Renewable energies |
| VPP | Virtual power plant |
| CRSTS | Central receiver solar thermal system |
| WTG | Wind turbine generator |
| EV | Electric vehicle |
| GA | Genetic algorithm |
| PSO | Particle swarm optimization |
| SSA | Slap swarm algorithm |
| BOA | Butterfly optimization algorithm |
| DERs | Distributed energy resources |
| ICT | Information and communication technology |
| EMS | Energy management system |
| ESS | Energy storage system |
| PID | Proportional integral derivative |
| TD | Communication time delay |
| ISE | Integral of the square error |
Appendix A
References
- Strasser, T.; Andren, F.; Kathan, J.; Cecati, C.; Buccella, C.; Siano, P.; Leitão, P.; Zhabelova, G.; Vyatkin, V.; Vrba, P.; et al. A Review of Architectures and Concepts for Intelligence in Future Electric Energy Systems. IEEE Trans. Ind. Electron. 2014, 62, 2424–2438. [Google Scholar] [CrossRef] [Green Version]
- Xin, H.; Gan, D.; Li, N.; Li, H.; Dai, C. Virtual power plant-based distributed control strategy for multiple distributed generators. IET Control Theory Appl. 2012, 7, 90–98. [Google Scholar] [CrossRef] [Green Version]
- Praveen, R.P. Performance Analysis and Optimization of Central Receiver Solar Thermal Power Plants for Utility Scale Power Generation. Sustainability 2020, 12, 127. [Google Scholar]
- Niñerola, A.; Ferrer-Rullan, R.; Vidal-Suñé, A. Climate Change Mitigation: Application of Management Production Philosophies for Energy Saving in Industrial Processes. Sustainability 2020, 12, 717. [Google Scholar] [CrossRef] [Green Version]
- Du, E.; Zhang, N.; Hodge, B.M.; Wang, Q.; Kang, C.; Kroposki, B.; Xia, Q. The role of concentrating solar power toward high renewable energy penetrated power systems. IEEE Trans. Power Syst. 2018, 33, 6630–6641. [Google Scholar] [CrossRef]
- Ho, C.K. Advances in central receivers for concentrating solar applications. Sol. Energy 2017, 152, 38–56. [Google Scholar] [CrossRef]
- Nadeem, F.; Aftab, M.A.; Hussain, S.M.; Ali, I.; Tiwari, P.K.; Goswami, A.K.; Ustun, T.S. Virtual Power Plant Management in Smart Grids with XMPP Based IEC 61850 Communication. Energies 2019, 12, 2398. [Google Scholar] [CrossRef] [Green Version]
- Yavuz, L.; Önen, A.; Muyeen, S.M.; Kamwa, I. Transformation of microgrid to virtual power plant—A comprehensive review. IET Gener. Transm. Distrib. 2019, 13, 1994–2005. [Google Scholar] [CrossRef]
- Castillo, A.; Flicker, J.; Hansen, C.W.; Watson, J.P.; Johnson, J. Stochastic Optimization with Risk Aversion for Virtual Power Plant Operations: A Rolling Horizon Control. IET Gener. Transm. Distrib. 2018, 13, 2063–2067. [Google Scholar] [CrossRef]
- Ramos, L.F.; Canha, L.N. Virtual Power Plants and Their Prospects. Electr. Electron. Eng. 2019, 1–21. [Google Scholar] [CrossRef]
- Zajc, M.; Kolenc, M.; Suljanović, N. Virtual power plant communication system architecture. In Smart Power Distribution Systems Control, Communication, and Optimization; Academic Press: London, UK, 2018; pp. 231–250. [Google Scholar]
- Khorasany, M.; Azuatalam, D.; Glasgow, R.; Liebman, A.; Razzaghi, R. Transactive Energy Market for Energy Management in Microgrids: The Monash Microgrid Case Study. Energies 2020, 13, 2010. [Google Scholar] [CrossRef]
- Obaid, Z.A.; Cipcigan, L.M.; Abrahim, L.; Muhssin, M.T. Frequency control of future power systems: Reviewing and evaluating challenges and new control methods. J. Mod. Power Syst. Clean Energy 2018, 7, 9–25. [Google Scholar] [CrossRef]
- Abbasi, E. Coordinated primary control reserve by flexible demand and wind power through ancillary service–centered virtual power plant. Int. Trans. Electr. Energy Syst. 2017, 27, e2452. [Google Scholar] [CrossRef]
- Tavakkoli, M.; Adabi, J.; Zabihi, S.; Godina, R.; Pouresmaeil, E. Reserve Allocation of Photovoltaic Systems to Improve Frequency Stability in Hybrid Power Systems. Energies 2018, 11, 2583. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Xin, H.; Wang, Z.; Gan, D. Control of virtual power plant in microgrids: A coordinated approach based on photovoltaic systems and controllable loads. IET Gener. Transm. Distrib. 2015, 9, 921–928. [Google Scholar] [CrossRef] [Green Version]
- Pudjianto, D.; Ramsay, C.; Strbac, G. Virtual power plant and system integration of distributed energy resources. IET Renew. Power Gener. 2007, 1, 10–16. [Google Scholar] [CrossRef]
- Vandoorn, T.L.; Zwaenepoel, B.; De Kooning, J.D.; Meersman, B.; Vandevelde, L. Smart microgrids and virtual power plants in a hierarchical control structure. In Proceedings of the 2011 2nd IEEE PES International Conference and Exhibition on Innovative Smart Grid Technologies, Manchester, UK, 5–7 December 2011; pp. 1–7. [Google Scholar]
- Newman, G.; Mutale, J. Characterising Virtual Power Plants. Int. J. Electr. Eng. Educ. 2019, 4, 307–318. [Google Scholar] [CrossRef]
- Ruiz, N.; Cobelo, I.; Oyarzabal, J. A direct load control model for virtual power plant management. IEEE Trans. Power Syst. 2009, 24, 959–966. [Google Scholar] [CrossRef]
- Javaid, C.J.; Allahham, A.; Giaouris, D.; Blake, S.; Taylor, P. Modelling of a virtual power plant using hybrid automata. In Proceedings of the 9th International Conference on Power Electronics, Machines and Drives (PEMD 2018), Liverpool, UK, 17–19 April 2018; pp. 3918–3922. [Google Scholar]
- Wu, H.; Ni, H.; Heydt, G.T. The Impact of Time Delay on Robust Control Design in Power Systems. In Proceedings of the IEEE Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002. [Google Scholar]
- Ranjan, S.; Das, D.C.; Behera, S.; Sinha, N. Parabolic trough solar–thermal–wind–diesel isolated hybrid power system: Active power/ frequency control analysis. IET Renew. Power Gener. 2018, 12, 1893–1903. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization; Purdue School of Engineering and Technology: Indianapolis, IN, USA, 1995; pp. 1–7. [Google Scholar]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Tungadio, D.H.; Bansal, R.C.; Siti, M.W. Optimal control of active power of two micro-grids interconnected with two AC tie-lines. Electr. Power Compon. Syst. 2017, 45, 2188–2199. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K.; Tripathy, M. Load Frequency Control of Multi Area Interconnected Microgrid Power System using Grasshopper Optimization Algorithm Optimized Fuzzy PID Controller. In Proceedings of the 2018 Recent Advances on Engineering, Technology and Computational Sciences (RAETCS), Allahabad, India, 6–8 February 2018; pp. 1–6. [Google Scholar]
- Ei-Fergany, A.A.; Ei-Hameed, A.M. Efficient frequency controllers for autonomous two-area hybrid microgrid system using social-spider optimizer. IET Gener. Transm. Distrib. 2017, 11, 637–648. [Google Scholar] [CrossRef]
- Bhuyan, M.; Barik, A.K.; Das, D.C. GOA optimised frequency control of solar-thermal/sea-wave/biodiesel generator based interconnected hybrid microgrids with DC link. Int. J. Sustain. Energy 2020, 39, 615–633. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, Q.; He, B.; Wang, Y.; Yang, J.; Pan, X. Load frequency control in multiple microgrids based on model predictive control with communication delay. J. Eng. 2017, 2017, 1851–1856. [Google Scholar] [CrossRef]
- Global Review of Solar Tower Technology. August 2014. Available online: http://www.seriius.org/pdfs/global-review-solar-tower-technology.pdf (accessed on 26 August 2020).
- Cerecedo, L.O.L.; Pitalua-Diaz, N.; Transito, I.S.; Contreras, L.E.V.; Bulnes, C.A. Optical performance modeling of a solar tower heliostat field and Estimation of receiver temperature. In Proceedings of the 2013 IEEE International Autumn Meeting on PE and computing, Mexico City, Mexico, 13–15 November 2013; pp. 1–6. [Google Scholar]
- Latif, A.; Das, D.C.; Barik, A.K.; Ranjan, S. Maiden co-ordinated load frequency control strategy for ST-AWEC-GEC-BDDG based independent three-area interconnected microgrid system with combined effect of diverse energy storage and DC link using BOA optimized PFOID controller. IET Renew. Power Gener. 2019, 10, 2634–2646. [Google Scholar] [CrossRef]
- Tehrani, K. A smart cyber physical multi-source energy system for an electric vehicle prototype. J. Syst. Archit. 2020, 111, 101804. [Google Scholar] [CrossRef]
- Bendjedia, M.; Tehrani, K.A.; Azzouz, Y. Design of RST and fractional order PID controllers for an induction motor drive for electric vehicle application. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–8. [Google Scholar]
- Khezri, R.; Oshnoei, A.; Hagh, M.T.; Muyeen, S.M. Coordination of Heat Pumps, Electric Vehicles and AGC for Efficient LFC in a Smart Hybrid Power System via SCA-Based Optimized FOPID Controllers. Energies 2018, 11, 420. [Google Scholar] [CrossRef] [Green Version]
- Singh, V.P.; Samuel, P.; Kishor, N. Effect of Communication Delay on Load Frequency Control Application in Autonomous Hybrid Power System. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies, Bangkok, Thailand, 3–6 November 2015; pp. 1–6. [Google Scholar]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Optimum Synthesis of a BOA Optimized Novel Dual-Stage PI − (1 + ID) Controller for Frequency Response of a Microgrid. Energies 2020, 13, 3446. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nomenclature | Value | |
|---|---|---|
| KRF, KRV, KG, KT | Gains of refocus, receiver, governor and turbine of CRSTS | 1, 1, 1, 1 |
| TRF, TRV, TG, TT | Time of refocus, receiver, governor, and turbine of CRSTS | 1.33 s, 4 s, 0.08 s, 1 s |
| KWTG, TWTG | Gain and time constant of WTG | 1, 1.5 s |
| KTd, TTd | EV gain and time constant | 1, 0.15 s |
| TG1, TT1 | Gain and delay of conventional generator | 0.08, 0.3 s |
| R1, R2 | Constant droop value of area-1, 2 | 2.4 Hz/p.u MW |
| B1, B2 | Biasing constant of area-1, 2 | 0.429, 0.424 |
| Ksys1, Ksys2 | System characteristics | 1120 |
| M1&M2 | Moment of inertia of the VPP and Conventional Generator. | 0.2 s, 0.166 s |
| D1&D2 | Damping constant of the VPP and Conventional Generator. | 0.012, 0.008 (p.u MW/Hz) |
| TD1, TD2 | Communication delay for VPP and Conventional plant | 1.2 s, 1 s |
| T12 | Synchronizing tie-line co-efficient between area-1 and 2 | 4.397 |
| Case | Subsystem | Simulation Time (s) | Operating Condition |
|---|---|---|---|
| Case-1: for comparison between PI and PID controller performance | CRSTS, WTG, DEG, PHEV and load | 100 | PWTG = 0.1 p.u. at 0 < t < 20 s = 0.11 p.u. at t > 20 s Pd1 = 0.02 p.u. at 0 < t < 40 s = 0.03 p.u. at 40 < t < 60 s = 0.05 p.u. at t > 60 s Communication time delay for Area-1 is TD1 = 1.2 s and for Area-2 is TD2 = 1 s |
| Case-2: for comparison of optimization algorithms GA, PSO, SSA and BOA | |||
| Case-3: for comparison of dynamic response with increased time delay attacks |
| Case-1 | Response | Peak over Shoot (H.z) | Peak Under-Shoot (H.z) | Settling Time (s) |
|---|---|---|---|---|
| PI | Δf1 | 0.04019 | 0.01149 | 90.00 |
| Δf2 | 0.03882 | 0.01101 | 89.36 | |
| ΔPtie | 0.01635 | 0.00459 | 89.58 | |
| PID | Δf1 | 0.01796 | 0.006509 | 83.65 |
| Δf2 | 0.0159 | 0.004616 | 82.74 | |
| ΔPtie | 0.00658 | 0.002019 | 81.04 |
| Case-3 | Response | Peak over Shoot (H.z) | Peak Under-Shoot (H.z) | Settling Time (s) |
|---|---|---|---|---|
| GA | Δf1 | 0.01498 | 0.00908 | 72.11 |
| Δf2 | 0.01405 | 0.00912 | 74.24 | |
| ΔPtie | 0.00427 | 0.00309 | 73.85 | |
| PSO | Δf1 | 0.01796 | 0.006509 | 83.65 |
| Δf2 | 0.01590 | 0.004616 | 82.74 | |
| ΔPtie | 0.00658 | 0.002019 | 81.04 | |
| SSA | Δf1 | 0.01730 | 0.006306 | 75.74 |
| Δf2 | 0.01394 | 0.00528 | 75.54 | |
| ΔPtie | 0.00662 | 0.00176 | 75.25 | |
| BOA | Δf1 | 0.01428 | 0.00757 | 70.30 |
| Δf2 | 0.01217 | 0.00561 | 72.02 | |
| ΔPtie | 0.004153 | 0.00239 | 72.60 |
| Time Delay Attacks | Response | Peak over Shoot (Hz) | Peak Under-Shoot (Hz) | Settling Time (s) |
|---|---|---|---|---|
| TD1 = 1.2 s | Δf1 | 0.01428 | 0.00757 | 70.30 |
| Δf2 | 0.01217 | 0.00561 | 72.02 | |
| ΔPtie | 0.004153 | 0.00239 | 72.60 | |
| TD1 = 1.3 s | Δf1 | 0.01639 | 0.00857 | 74.6 |
| Δf2 | 0.01397 | 0.00639 | 73.19 | |
| ΔPtie | 0.00477 | 0.00247 | 75.62 | |
| TD1 = 1.4 s | Δf1 | 0.01894 | 0.0122 | 80.20 |
| Δf2 | 0.01616 | 0.01137 | 80.10 | |
| ΔPtie | 0.00542 | 0.00408 | 80.26 | |
| TD1 = 1.5 s | Δf1 | 0.02134 | 0.01738 | Unsettled |
| Δf2 | 0.01864 | 0.01602 | Unsettled | |
| ΔPtie | 0.00622 | 0.00561 | Unsettled |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dey, P.P.; Das, D.C.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. Active Power Management of Virtual Power Plant under Penetration of Central Receiver Solar Thermal-Wind Using Butterfly Optimization Technique. Sustainability 2020, 12, 6979. https://doi.org/10.3390/su12176979
Dey PP, Das DC, Latif A, Hussain SMS, Ustun TS. Active Power Management of Virtual Power Plant under Penetration of Central Receiver Solar Thermal-Wind Using Butterfly Optimization Technique. Sustainability. 2020; 12(17):6979. https://doi.org/10.3390/su12176979
Chicago/Turabian StyleDey, Partha Pratim, Dulal Chandra Das, Abdul Latif, S. M. Suhail Hussain, and Taha Selim Ustun. 2020. "Active Power Management of Virtual Power Plant under Penetration of Central Receiver Solar Thermal-Wind Using Butterfly Optimization Technique" Sustainability 12, no. 17: 6979. https://doi.org/10.3390/su12176979