
Status and Prospects of the Development of Deep-Sea Polymetallic Nodule-Collecting Technology

1
College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China
2
Changsha Research Institute of Mining and Metallurgy, Changsha 410012, China
3
National Key Laboratory of Deep Sea Mineral Researches Development and Utilization Technology, Changsha 410012, China
*
Author to whom correspondence should be addressed.
Sustainability 2023, 15(5), 4572; https://doi.org/10.3390/su15054572
Submission received: 29 December 2022
/
Revised: 20 February 2023
/
Accepted: 27 February 2023
/
Published: 3 March 2023
(This article belongs to the Special Issue Frontiers in Deep Sea Mining: Current Status and Future Prospects)
Abstract
:The deep-sea is rich in mineral resources, and deep-sea polymetallic nodules are considered to be the most likely resource for commercial exploitation. Since the discovery of polymetallic nodules by mankind, researchers around the world have made long and arduous explorations in the exploitation of deep-sea polymetallic nodules and have proposed various mining methods, such as the dragging bucket type, the continuous bucket rope type, the automatic shuttle boat type, and the pipeline -lifting type, and have carried out technical verification accordingly. In the collection of seabed polymetallic nodules, the development and testing of towed type, spiral-driven type, crawler self-propelled type, and suspended type technologies have been carried out, basically realizing the mining technology verification of seabed polymetallic nodules and providing technical support for commercial development. However, according to the demand for commercial development, there are still many technical difficulties in polymetallic nodule-collecting technology, and more focus needs to be placed on the efficiency, environmental protection, intelligence, safety, and reliability of the collecting system in the future. This paper compares the existing progress in collection technology and equipment, and provides ideas and references for the research and development of deep-sea polymetallic nodule-mining technology and equipment.
1. Introduction
The evolutionary history of human beings is the history of the use of resources. With the use of materials ranging from stone and bronze to steel and alloy, the degree of human utilization of mineral resources perfectly reflects the degree of progress in human society. The bottom of the vast ocean is abundant in mineral resources, and the deep-sea mineral resources with development potential include polymetallic nodules, cobalt-rich crusts, polymetallic sulfides, and rare earth-rich sediments. Among them, polymetallic nodules are characterized by large reserves and wide distribution, and the reserves of manganese, nickel, cobalt, and other metals they contain are much higher than those on land [1,2,3]. The first discovery of polymetallic nodules by Sofia in the Kara Sea of the Arctic Ocean was made in 1868; since then, a long and arduous quest for key technologies and equipment to achieve effective mining of deep-sea polymetallic nodules has begun [4]. In 1957, MERO first analyzed the technical and economic efficiency of nodule-mining; since then, deep-sea mineral development has attracted lots of attention [5]. The process of deep-sea mining will not only release a large amount of mud and dissolved chemicals, forming sediment plumes, but also generate loud noise that will spread to the upper waters, which may adversely affect the ecology and biodiversity of the deep and middle-level waters located at a depth of 200–5000 m [6]. If commercial mining can be conducted safely and efficiently, and the impact on the marine ecological environment in the operation process is well-controlled, the abundant marine minerals will become alternative resources of the onshore mineral resources and meet the economic demand of human society in the future [7,8]. Therefore, most countries with marine resource reserves and technical possibilities are intensifying the exploration and exploitation of marine mineral resources, with particularly fierce competition in the mining of polymetallic nodules [9]. Any country or organization is required to obtain an exploration contract from the International Seabed Authority (ISA) before proceeding with the exploitation of deep-sea mineral resources. At present, the United Nations International Seabed Authority has issued 31 deep-sea mineral exploration contracts to 22 contractors from China, the United Kingdom, Russia, India, South Korea, France, and other countries, including 19 polymetallic nodules, seven polymetallic sulfides, and five cobalt-rich crust exploration contracts [10].
In the late 1950s, the countries with a high level of scientific development, mainly including the United States, Europe, and Japan, took the lead in studying exploration and commercial mining programs for deep-sea polymetallic nodules [11,12]. In the 1980s or 1990s, China, South Korea, and India also joined the deep-sea mineral resources development team to explore the design of mining systems and commercial mining solutions [13]. In the past few years, most countries have carried out single or comprehensive mining testing, and significant progress has been made in deep-sea mineral resource development technology and equipment, especially deep-sea polymetallic nodule-mining technology and equipment.
The mining of deep-sea mineral resources is a huge and extremely complex engineering system, which is constrained by stringent environmental protection requirements, economic requirements, and the uncertainty of a complex marine environment, as well as the mutual influence of the structural design, operation mode, reliability, and operation and maintenance technology of the mining system. These factors make the deep-sea mineral resource exploitation technology system more complex. Since the 1980s, the world has carried out the chain bucket type [14], towed type [15], shuttle warehouse type, self-propelled type, and other different technical solutions and researches of different technical depths. With the deepening understanding of deep-sea polymetallic nodule-mining technology in the industry, a mining system consisting of three major parts, namely a subsea mining vehicle, an intermediate transportation system, and a surface support system, has gradually been formed [16,17]. Seafloor ore-collection is the top priority in the process of polymetallic nodule-mining, which directly affects the economy, environmental protection, and reliability of the mining system [18].
2. Development Status
The worldwide development programs for deep-sea nodule resources are mainly divided into four categories: towed bucket type, continuous bucket rope type, automatic shuttle boat type, and pipeline-lifting type. The first three mining methods have been considered to be of no research value, due to their low collection efficiency and serious impact on the environment [9]. At present, pipeline-lifting deep-sea mining systems are the focus of research [19], including seabed ore-collection equipment, ore-conveying equipment, and water surface support equipment.
2.1. Time Phases and Progress
The technological development of polymetallic nodules can be divided into three periods [20]. The first period is from the 1950s to 2000. During this period, a variety of different deep-sea mining methods and system ideas were proposed, and a number of offshore tests were conducted to verify feasibility. Although some of these ideas did not yield development-worthy results, some studies have demonstrated the feasibility of deep-sea mining, especially deep-sea polymetallic nodule collection. The direction of the subsequent key technological efforts was pointed out. The second stage is from 2000 to 2020. During this period, more countries joined the deep-sea mining technology research and development effort and carried out corresponding verification tests. Based on the characteristics of the resources contained in their mining areas and the existing technology base, each country and institution has carried out targeted research and development of key technologies for deep-sea mining. However, the depth of technology research and development is not enough; both are in the field of single technology verification, and the offshore mining tests in the mining area have not been completed. The third stage started in 2020. The increase in society’s demand for metallic mineral resources has caused countries to pay great attention to the commercial development of deep-sea mineral resources. The mining area management system is maturing and organizations are increasing the layout of related research based on the goal of commercial mining. Deepwater operation technology is gradually maturing, and technology development is focused on the overall linkage system that can realize commercial deepwater resource extraction. At the same time, concerns about the environmental impact of deep-sea mining are also increasing.
Several international consortia, such as the Marine Management Company, successfully collected polymetallic nodules on the seabed of about 5000 m in the Pacific Ocean in the 1970s [21]. Subsequently, Russia, Germany, Japan, India, South Korea, and other countries have carried out sea tests to inspect the performance of their technical equipment [22]. In the past few years, the European Union has launched a number of projects aimed at the exploitation of deep-sea mineral resources, such as “Blue Mining”, “Blue Nodules”, and ¡VAMOS! (Viable Alternative Mine Operating System) [23]. Table 1 summarizes the development status of deep-sea polymetallic nodule-mining technology. Relevant research institutions at home and abroad have carried out technical verification of the core seabed mining technology and equipment in deep-sea mining through a large number of offshore trials. At present, the submarine crawler self-collected mining operation technology system has been formed; its key technologies involve efficient collection, steady walking, intelligent control, high-precision positioning, collaborative control, long-term operation and maintenance, low environmental disturbance, etc. Given the future commercial development, the mining technology will develop in the direction of high efficiency, environmental friendliness, intelligence, safety, and reliability.
2.2. Progress Made by Countries and Institutions
2.2.1. OMI, OMA, and OMCO
Ocean Management Institution (OMI) and Ocean Mineral Association (OMA) dragged sled-mounted mining collectors through the lifting pipes of mining vessels to passively move around the seabed with an operating water depth of 5200 m. They conducted three sea trials and collected a total of 800 t polymetallic nodules with a capacity of 40 tons per hour (as shown in Figure 1). As seen in the figure, both mining methods are based on towed collectors for collecting; the one on the left is the pneumatic lifting mining system designed by OMA, and the one on the right is the system of the hydrodynamic lifting method with submersible electric pumps adopted by OMI. The results obtained from this sea trial laid down the composition of the deep-sea mining system with the basic framework of a seafloor collector, hoisting system, and surface support system.
The mining collector of Ocean Mining Corporation (OMCO) adopted the Archimedes spiral propulsion mechanism to realize self-propelled walking. The operating water depth was 5000 m, and about 1000 t polymetallic nodule ore was collected [29]. A mining robot with a spiral groove at the bottom and a large surface support vessel supporting its operation is shown in Figure 2. It can be imagined that it is difficult to achieve high-precision path-tracking by relying on a pipeline more than 5000 m long pulling the mining collector. The self-propelled Archimedes spiral walking mechanism should theoretically have this ability. However, because the sediment is easy to lay on the spiral groove during travel, it leads to serious walking slip, difficult turning, low bearing capacity, and large disturbances to the seabed. Additionally, the carrying capacity is relatively low, and the disturbance to the seabed is large [38,39,40,41].
2.2.2. Japan Oil, Gas & Metals National Corp (JOGMEC), Japan
In 1997, Japan developed a towed ore-collection mechanism (as shown in Figure 3) and completed the offshore collection test in the 2200-meter deep-sea area [26]. In 2002, Japan’s JOGMEC developed a self-propelled ore-collector to complete the seabed walking test at a depth of 1600 m, and completed the seabed mining test in 2012. In 2020, JOGMEC collected 649 kg of cobalt- and nickel-rich seabed crust during a world-first test aboard the marine resource research vessel “Hakurei” [42].
2.2.3. National Institute of Ocean Technology (NIOT), India
The Indian National Institute of Ocean Technology (NIOT) conducted partial sea trials of the mining system at 410 m and 450 m water depths in 1996 and 2006, respectively [25]. Two sea trials were completed by using crawler walking and hydraulic collection (as shown in Figure 4). The working performance of the miner when walking on the seabed was tested, and the sand mining and transportation tests of the pump on the seabed were carried out.
2.2.4. Korea Institute of Ocean Science and Technology (KIOST)
South Korea developed the “MineRo I” and “MineRo II” mining vehicles from 2007 to 2013, and completed the polymetallic nodule collection simulation test at a water depth of 1370 m. The test used the crawler walking mechanism and the hydraulic mechanical composite collection mechanism (as shown in Figure 5). The machine weighs 28 t in the air and 10 t in the water, and it collected 1535 t of polymetallic nodules. The test examined the performance of the vehicles on the seabed [30,31]. At the same time, the performance test of the mining collector was also conducted to verify the good path control ability of the mining collector on the seabed.
2.2.5. Global Sea Mineral Resources (GSR), Belgium
After completing the walking test of the 4571 m-deep mining vehicle in 2017, the Belgian GSR, together with the German Federal Institute for Geosciences and Natural Resources (BGR), applied to the International Seabed Authority in 2018 to carry out the mining vehicle walking and nodule collection tests in the International Seabed Polymetallic Nodule Exploration Contract Area, together with environmental impact assessment studies in conjunction with the tests [32]. In April 2019, the GSR developed a crawler walking and hydraulic collection test prototype (as shown in Figure 6). The sea trials started in the contract area. The sea trial’s depth was 4500 m, the size of the collector was 12 m × 4 m × 4.5 m, the weight in the air was 25 tons, the weight in the water was 8.5 tons, the production capacity was 110~120 t/h, and the collection depth was 5~12 cm. The test was interrupted, however, due to the failure of the optical fiber cable. In April 2021, GSR started the sea trial of the miner in the contract area again and completed the walking and collection test of the miner on the seabed in the contract area in May 2021. The driving distance was 54.2 km, and the cumulative running time was 107 h, which verified the feasibility of crawler walking and hydraulic acquisition technology. At the same time, the environmental impact test of polymetallic nodule-mining was carried out.
2.2.6. Changsha Research Institute of Mining and Metallurgy, China
Since the 1980s, China has engaged in deep-sea polymetallic nodule technology research and development. The Changsha Research Institute of Mining and Metallurgy researched the crawler polymetallic nodule mine laboratory prototype in 1995. In 2001, the Changsha Institute of Mining Research, the Changsha Research Institute of Mining and Metallurgy, and other units jointly developed a 135 m water depth polymetallic nodule ore prototype with a capacity of 35 t/h, and completed a 143 m water depth lake test in Yunnan Fuxian Lake, which preliminary verified the walking collection function [27,28]. In 2018, the Changsha Research Institute of Mining and Metallurgy, combined with Central South University and other units, completed the development of the polymetallic nodules mining machine "Kun Long 500" (as shown in Figure 7) [33], completed the sea trial in the China South Sea, and verified the crawler walking mechanism and the hydraulic collection mechanism in the experiment. The authors and their team were involved in the pre-design and sea trials of this research. In the experiment, the maximum operating water depth is 514 m, the collection capacity of polymetallic nodules is 10 t/h, the longest distance of a single drive is 2881 m, and the underwater positioning accuracy is 0.72 m, which realizes the ability of the predetermined path in the autonomous driving mode, and a pentagram with a unilateral length of 120 m emerges from the seafloor along a set path [43,44].
In 2021, under the organization of the China Oceanic Association, the Changsha Research Institute of Mining and Metallurgy, the Changsha Research Institute of Mines, Central South University, and other dozens of enterprises, research institutes, and universities jointly developed a 3500 m water depth, 1/10 commercial mining scale mining vehicle (as shown in Figure 8), and a more than 1000 m water depth test lifting pump and pipeline system ( which can be extended to 3500 m water depth ) [36,37]. In July of the same year, the joint test of the 1300 m water depth system was completed. In the experiment, a series of tests were completed, such as the steady walking of the tracked mining truck on the seabed and hydraulic mining. A total of 1166 kg of polymetallic nodules were collected by the vehicle during the test. This is the first deep-sea polymetallic nodule system-wide mining test since the 1970s, after the completion of the sea trial of polymetallic nodule-mining by OMI and OMCO in the United States. It is also the world’s first mining linkage sea trial of tracked, self-propelled collectors and hydraulic pipeline-lifting.
2.2.7. The Metals Company (TMC), Canada
In 2022, Canada’s TMC company developed a polymetallic nodule collection, transportation, and water surface system. Its ore collector adopts a crawler driving mechanism and a hydraulic ore-collecting mechanism. In November 2022, the 4400 m deep-sea mining test and environmental impact monitoring were completed (as shown in Figure 9). The mining truck’s size is 12 m × 6 m × 5 m, its weight is 90 t, its production capacity is 100 t/h, its climbing ability is 4°, its collection depth is 5 cm, its sea test distance is 52 km, and its walking speed is 0.1 to 0.75 m/s, to 3021 tons of ore on the surface. The offshore test is the world’s first multi-metal nodule self-propelled collector mining offshore test, and it completed system-wide technical validation and data monitoring for environmental impact.
The main countries and institutions described above have contributed to the development of deep-sea polymetallic nodule-mining. The investigations of OMI, OMA, and OMCO have laid the foundation for deep-sea mining and identified suitable design methods for polymetallic nodule-mining systems. JOGMEC has made various attempts and provided references for the development of the structural design of the moving and collecting parts of mining vehicles. Subsequently, the Changsha Research Institute of Mining and Metallurgy and KIOST carried out further research based on this structure and improved the hydraulic collecting method. The two institutions have developed a highly reliable hydraulic structure and a combined hydraulic-mechanical collection method with low environmental disturbance. The highlight of GSR’s research is the deeper sea trial water depth, and the TMC achieved the integration and coordination of a complete deep-sea mining system.
3. Technical Difficulties of Commercial Mining
The mineral resources on land are decreasing day by day, while the ocean contains rich mineral resources, such as polymetallic combinations. If the commercial development of deep-sea mineral resources can be realized, the shortage of land resources can be solved. After years of research by various countries, breakthroughs have been made in some separate technical areas of deep-sea mining. However, the sea trials that have been carried out so far are only single partial subsystem tests, and the sea trial time and performance verification are limited. The commercial development of polymetallic nodules is still facing many common problems and obstacles in terms of efficient and stable operation, deep-sea environment and biological protection, and integrated operation.
3.1. Efficiency and Disturbance
Commercial mining of deep-sea polymetallic nodules requires high collection efficiencies to ensure economic benefits and disturbance conditions that do not harm the seafloor environment. Polymetallic nodules are two-dimensional ore bodies scattered on thin, soft sediments, which are easily pressed into the sediments by walking mining vehicles. It is necessary to collect as much ore as possible at one time to achieve maximum collection efficiency. Although the hydraulic ore-mining technology has passed the 1000 m degree sea trial, there are some problems with low collection efficiency and large environmental disturbance. At the same time, it lacks the ability of intelligent perception and recognition of the abundance of submarine nodules in the collection process, so intelligent evaluation and decision-making adjustments of relevant parameters cannot be realized to improve the collection rate.
3.2. Walking Technology on the Submarine Substrate
The technology of deep-sea mining vehicles traveling on the substrate faces the problems of low adaptability and high disturbance. The sediment on the seabed is extremely soft, and it is difficult for heavy deep-sea equipment to touch the bottom. The disturbance and diffusion of sediment caused by walking are two of the main sources of environmental impact. Therefore, achieving robust, flexible, and low-disturbance walking is the key to achieving green mining.
3.3. Positioning and Navigation Technology
In the deep, strongly disturbed seabed mining operating environment, the accuracy of mining vehicle positioning and navigation is difficult to guarantee. Due to the large noise of the heavy load operation of the mining vehicle during the operation, the acoustic signal of the acoustic positioning system is disturbed, and accurate positioning cannot be achieved. At the same time, high-precision mining path planning and tracking are the keys to achieving efficient mining, which can effectively reduce repeated paths and improve operation efficiency. However, the tracking accuracy of the current path needs to be further improved.
3.4. Power Transmission Technology
The existing power transmission technology cannot meet the demand for long-distance high-power transmission. The mining vehicle is a heavy-duty piece of high-power operation equipment, and all its power sources are transported by surface ships through long-distance cables. However, given the impact of the mining environment and complex sea conditions, achieving long-distance, high-power, stable transmission is the only way to ensure deep-sea mining operations.
3.5. Cooperative Control Technology
The intelligent control technology required for collaborative operations is not yet able to meet the needs of large-scale mining. Stable control of mining trucks is the premise for ensuring their efficient and safe operation in the complex deep-sea environment. At present, the control method for deep-sea tracked vehicles is the traditional control method represented by the PID. Because the traditional control method does not consider the actual dynamic characteristics of the mining system, it is hard to achieve high precision and stable control in a complex interference environment. In particular, the stable control of mining vehicle walking is one of the keys to realizing reliable mining. The accuracy of walking tracking and collection control is further improved, which can effectively improve operational efficiency.
3.6. Deployment and Recovery Technology
With the large depth of heavy-duty operating equipment in a complex environment, safe deployment and recovery of collaborative control capabilities need to be improved. The water surface support deployment and recovery system is complex and difficult to coordinate. To make deep-sea mining develop towards the deep ocean and long-term production, the system needs to adapt to worse sea conditions, and the load of deployment and recovery increases sharply. Especially when heavy mining equipment enters and leaves the water, it is affected by wind and waves, which produce large-angle, fast swing, and heave motions. It is necessary to further study the anti-swing technology of heavy loads, and the intelligence, automation, and collaborative control abilities of deployment and recovery systems need to be further improved.
3.7. Large-Scale Sea Trials
Large-scale technology validation and application have not yet been carried out, and the reliability and stability of polymetallic nodule collection technology, equipment, and the overall system will restrict the commercialization of deep-sea mining. The deep-sea polymetallic nodule-mining area is located in the international seabed area, and the current mining test is not long, which has not effectively verified the stability and reliability of the entire system. Therefore, in the subsequent research, determining how to complete the reliability and stability verification economically and efficiently will be a major difficulty.
4. Trends and Prospects
Nowadays, the research and development of polymetallic nodule-mining technology has ushered in a new opportunity. The demand for metals in the new energy market has accelerated the upgrading of mining technology, but the increasingly strict environmental impact assessment also makes the polymetallic nodule-mining technology develop towards a more environmentally friendly direction. This is a new stage in the development of deep-sea polymetallic nodule-mining technology.
The development of mineral collection technology is geared toward commercialization and sustainability. Achieving commercialization will enable humans to economically sustain the exploitation of seafloor minerals, and achieving sustainability means reducing the impact on the marine environment and ensuring marine biodiversity. Currently, the focus and difficulties of the development of the mineral collection technology are to improve mining efficiency, reduce the impact on the environment when mining, improve the accuracy of positioning and navigation, accelerate the improvement of intelligent control technology, and improve the reliability and efficiency of deployment and recovery.
4.1. High Demand in the New Energy Market
The current demand for metals such as cobalt, nickel, and copper from rapidly developing new energy technologies may facilitate the commercial mining of deep-sea polymetallic nodules [45]. DeepGreen and SOAC have jointly established The Metals Company. At the same time, they have established partnerships with well-known enterprises in the industry, such as Glencore, Maersk, ALLSEAS, and HATCH. They plan to submit development contract applications to the ISA in 2023, start small-scale commercial production in 2024, and start large-scale production in 2025–2026 [46]. The deep-sea polymetallic nodule-mining technology will become the key research and development object of related industries and enterprises in the world, and will achieve greater development driven by commercial interests and national strategies.
4.2. Environmental Impact Assessment
Some experts argue that deep-sea mining has less impact on the environment than land-based mining [47]. However, some experts oppose deep-sea mining, arguing that the deep-sea environment is extremely fragile and that humans do not really understand the ocean [48]. Therefore, it is essential to minimize the environmental impact of deep-sea mining. The environmental impact assessment of deep-sea mining is an important prerequisite for applying for an exploitation contract. According to the review procedure stipulated in the ISA regulations, the environmental plan provided by the applicant related to the “exploitation contract” should be publicly released, and the written opinions of the members and stakeholders of the Authority should be solicited. Before the review procedure for the environmental plan is completed, the authority will not consider and approve the application. The development regulations based on exploration contracts propose systematic norms and standards for contractors’ environmental plans, covering multiple types of data throughout the mining process. The environmental impact assessment of mining operations is an important part of the sea trial. The International Seabed Authority is also formulating guidelines for environmental impact assessments of deep-sea mineral resource exploitation. Carrying out an environmental impact assessment of deep-sea mining will support our country’s right to participate in the formulation of international rules [49].
4.3. Guaranteed Collection Efficiency
Efficient mining of deep-sea polymetallic nodules is the economic basis for achieving commercial exploitation. The deep-sea polymetallic nodule-mining area is far away from the land, the nodules are distributed in the deep seabed, and the cost of offshore mining is high. At the same time, the polymetallic nodule is a two-dimensional deposit, and the substrate is thin and soft. Once the collection efficiency is low, the uncollected nodules will be buried under the sediment, causing great waste of resources and greatly reducing the economic benefits of mining and the possibility of commercial mining. Therefore, efficient mining is the basis of deep-sea polymetallic nodule-mining.
4.4. Low Disturbance Operation Technology
The low-disturbance operation technology will be an important indicator for the evaluation of the environmental friendliness of the mining systems. Improving the awareness and standards of environmental protection is an inevitable trend in the development of human society. As an emerging industry, the environmental impact of deep-sea mining is of great concern to the international community. Reducing the impact on the deep-sea environment is an important prerequisite for deep-sea mining, which is conducive to sustainable development. Minimizing the disturbance to the seabed sediments and inhibiting the sediment plume during the collection process have become important research objectives of the collection head and crawler design. Equipment design and a process plan with low environmental disturbance must be the direction and rigid index of the development of a deep-sea polymetallic nodule-mining system.
4.5. Enhanced Accuracy and Intelligence Requirements
As the development of polymetallic nodules shifts from technical research to commercial applications, collecting technologies also need to evolve toward high reliability, high performance, and high intelligence. All-weather multi-functional water surface support platforms in the extreme marine environment, high-precision positioning, navigation, and coordinated control of deep-sea operation equipment in the deep-sea environment with strong interference, intelligent perception of submarine nodule occurrence in the process of submarine nodule collection, intelligent control and safety guarantee of solid-liquid two-phase flow in the process of transportation, intelligent detection, and evaluation maintenance of underwater equipment health status, safe and rapid deployment and recovery of underwater heavy-duty operation equipment under complex sea conditions, etc., are all requirements for mining equipment and systems in commercial mining, and are also the key technologies that must be mastered in the research of deep-sea polymetallic nodule-mining systems in the next stage.
4.6. Efficient and Safe Deployment and Recovery Operations
The key research direction in the future is deployment and recovery technology that meets the requirement of large operating depths while also being fast, efficient, safe, and reliable. As the water depth of the mining test increases, there may be a risk that the deployment of recovery windows in deep-sea and low-sea conditions will have a relatively short period. Therefore, higher requirements are put forward for the speed and efficiency of deployment and recovery. It is necessary to place mining vehicles and underwater pipelines from the surface platform to the 5000 m seabed in a shorter period and quickly recover them if necessary. Therefore, fast, efficient, safe, and reliable deployment and recovery technology is also a key research direction in the future. It can be combined with artificial intelligence technology to reduce the number of operators, reduce the intensity of work, and eventually move toward unmanned development.
5. Conclusions
Deep-sea mineral resources are abundant and have been attracting human exploration for 150 years since their discovery. The mining of polymetallic nodules has received more attention in global deep-sea mining research. The basic technology prototype, consisting of a surface mining vessel, a subsea tracked self-propelled ore-collector, and a hydraulic pipeline-lifting system, has been initially formed. The collecting technology is the primary link in the technology chain of the pipeline-lifting deep-sea mining system for polymetallic nodules, which directly affects the economy, environmental protection, and reliability of the integrated deep-sea mining operations. Some progress has been made in deep-sea polymetallic nodule-collecting technology, and relevant practical operations have been carried out. However, the high productivity, high reliability, and high environmental protection requirements of commercial mining bring new challenges to the research and development of deep-sea polymetallic nodule-mining technology and systems, and there are still many gaps to be filled in low-disturbance collection technology, walking technology, positioning and navigation technology, and deployment and recovery technology. High efficiency, green, intelligent, safe, and reliable deep-sea mining technology is the key research direction in the future.
Author Contributions
Conceptualization, Y.C. and Y.D.; methodology, Y.C.; software, Y.C.; validation, Y.C., Y.D. and Y.Z.; formal analysis, Y.C. and Y.D.; investigation, Y.C.; resources, C.Y.; data curation, C.L.; writing—original draft preparation, Y.C.; writing—review and editing, Y.C. and Y.Z. and C.Y.; visualization, Y.Z.; supervision, Y.D.; project administration, Y.D.; funding acquisition, Y.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key Research and Development Program of China, grant number SQ2016YF010109.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Peteren, S.; Kraeschell, A.; Augustin, N. News from the seabed—Geological characteristics and resource potential of deep-sea mineral resources. Mar. Policy 2016, 70, 175–187. [Google Scholar] [CrossRef]
- Hein, J.R.; Mizell, K.; Koschinsky, A.; Conrad, T.A. Deep-ocean mineral deposits as a source of critical metals for high- and green-technology applications: Comparison with land-based resources. Ore Geol. Rev. 2013, 51, 1–14. [Google Scholar] [CrossRef]
- Hein, J.R.; Koschinsky, A.; Kuhn, T. Deep-ocean polymetallic nodules as a resource for critical materials. Nat. Rev. Earth Environ. 2020, 1, 158–169. [Google Scholar] [CrossRef] [Green Version]
- Mero, J.L. A Preliminary Report on the Economics of Mining and Processing Deep-Sea Manganese Nodules; Institute of Marine Resources: Los Angeles, CA, USA, 1959; pp. 14–86. [Google Scholar]
- Glasby, G.; Li, J.; Sun, Z. Deep-sea nodules and Co-rich Mn crusts. Mar. Georesources Geotechnol. 2015, 33, 72–78. [Google Scholar] [CrossRef]
- Gao, Y.; Sun, D.; Huang, H.; Wang, C.S.; Qian, P.Y.; Wang, Z.L.; Shi, X.P.; Song, C.B. Progress of environmental research and management related to mineral resources in international seabed. Trans. Nonferrous Met. Soc. China 2021, 31, 2722–2737. [Google Scholar]
- Yang, N.; Chen, G.G. A review of the current status of mining technology for deep-sea mineral resources. Min. Mach. 2010, 38, 4–9. [Google Scholar]
- Dai, Y.; Zhang, Y.Y.; Bian, J.N.; Ma, W.B.; Chen, X. Research of hydrodynamic characteristics of propeller of subsea mining vehicle. Chin. J. Nonferrous Met. 2021, 31, 2771–2781. [Google Scholar]
- Yang, J.M.; Liu, L.; Lyu, H.N.; Lin, Z.Q. Deep-Sea Mining Equipment in China: Current status and prospect. Strateg. Study CAE 2020, 22, 1–9. [Google Scholar] [CrossRef]
- Liu, S.; Hu, J.; Zhang, R.; Dai, Y.; Yang, H. Development of mining technology and equipment for seafloor massive sulfide deposits. Chin. J. Mech. Eng. 2016, 29, 863–870. [Google Scholar] [CrossRef]
- Mero, J.L. The Mineral Resources of the Sea; Elsevier Oceanography Series: Amsterdam, The Netherlands, 1965. [Google Scholar]
- Van Wijk, J.M. Vertical Hydraulic Transport for Deep Sea Mining: A Study into Flow Assurance. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Chung, J.S. Deep-ocean mining technology: Development II. In Proceedings of the Proc 6th ISOPE Ocean Mining Symposium, Changsha, China, 9–13 October 2005; pp. 1–6. [Google Scholar]
- Masuda, Y.; Cruickshank, M.J.; Mero, J.L. Continuous bucket-line dredging at 12,000 feet. In Proceedings of the Offshore Technology Conference, Dallas, TX, USA, 18–20 April 1971; pp. 837–841. [Google Scholar]
- Thiel, H. From MESEDA to DISCOL: A new approach to deep-sea mining risk assessment. Mar. Min. 1991, 10, 369–386. [Google Scholar]
- Sharma, R. Deep-Sea Mining: Economic, Technical, Technological, and Environmental Considerations for Sustainable Development. Mar. Technol. Soc. J. 2011, 45, 28–41. [Google Scholar] [CrossRef]
- Kaufman, R.; Latimer, J.; Tolefson, D.; Senni, S. The design and operation of a pacific ocean deep-ocean mining Test Ship: R/V Deepsea Miner 2. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 1985; pp. 33–43. [Google Scholar]
- Huang, X.; Dai, Y.; Su, Q.; Cheng, H.Y.; Zhu, X. Simulation and experimental verification of water impact flow field of deep ocean mining vehicle entering water. Chin. J. Nonferrous Met. 2021, 31, 2782–2794. [Google Scholar]
- Xiao, Y.X.; Yang, L.B.; Cao, L.; Wang, Z.W. Distribution of marine mineral resource and advances of deep-sea lifting pump technology. J. Drain. Irrig. Mach. Eng. 2014, 32, 319–326. [Google Scholar]
- Kang, Y.; Liu, S. The development history and latest progress of deep-sea polymetallic nodule mining technology. Minerals 2021, 11, 1132. [Google Scholar] [CrossRef]
- Tang, D.S.; Yang, N.; Jin, X. Hydraulic lifting technique with vertical pipe for deep-sea coarse mineral particles. Min. Metall. Eng. 2013, 33, 1–8. [Google Scholar]
- Yang, N.; Chen, G.G. Status quo and development trendency of deep sea minerals mining technology. Min. Process. Equip. 2010, 38, 4–9. [Google Scholar]
- Boschen, R.E.; Rowden, A.A.; Clark, M.R.; Gardner, J.P. Mining of deep-sea seafloor massive sulfides: A review of the deposits, their benthic communities, impacts from mining, regulatory frameworks and management strategies. Ocean Coast. Manag. 2013, 84, 54–67. [Google Scholar] [CrossRef] [Green Version]
- Brocktt, F.H.; Huizingh, J.P.; Mcfarlane, J.A.R. Updated analysis of the capital and operating costs of a polymetallic nodule deep ocean mining system developed in the 1970s. In Proceedings of the ISA Workshop on Polymetallic Nodule Mining Technology—Current Status and Challenges Ahead, Chennai, India, 18–22 February 2008; pp. 54–80. [Google Scholar]
- Rajesh, S.; Gnanaraj, A.; Velmurugan, A.; Ramesh, R.; Muthuvel, P.; Babu, M.; Ramesh, N.; Deepak, C.; Atmanand, M. Qualification tests on underwater mining system with manganese nodule collection and crushing devices. In Proceedings of the 9th Ocean Mining Symposium, Maui, HI, USA, 19–24 June 2011; pp. 110–115. [Google Scholar]
- Yamada, H.; Yamazaki, T. Japan’s Ocean test of the nodule mining system. In Proceedings of the 8th International Offshore and Polar Engineering Conference, Montreal, QC, Canada, 24–29 May 1998; pp. 13–19. [Google Scholar]
- Yang, N. Research and development of polymetallic nodule mining technology in China. In Proceedings of the ISA Workshop on Polymetallic Nodule Mining Technology—Current Status and Challenges Ahead, Chennai, India, 18–22 February 2008; pp. 214–226. [Google Scholar]
- Liu, F.; Liu, Y.; Song, C.B.; Li, X.Y.; Luo, Y.; Gao, Y.; Zhang, D. Three decades’ development of China in deep-sea field. Chin. J. Nonferrous Met. 2021, 31, 2613–2623. [Google Scholar]
- Li, J.B.; Wang, Y.J.; Liu, L.; XU, X.W. The development status and prospect of deep-sea mineral resources development technology. Preview Technol. 2022, 1, 92–102. [Google Scholar]
- Hong, S.; Kimg, H.W.; Choi, J.S.; Yeu, T.K.; Park, S.J.; Lee, C.H.; Yoon, S.M. A self-propelled deep-seabed miner and lessons from shallow water tests. In Proceedings of the ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 1–12. [Google Scholar]
- Hong, S.; Kim, H.W.; Yeu, T.; Choi, J.S.; Lee, T.H.; Lee, J.K. Technologies for safe and sustainable mining of deep-seabed minerals. In Environmental Issues of Deep-Sea Mining; Springer: Cham, Switzerland, 2019; pp. 95–143. [Google Scholar]
- Kang, Y.J.; Liu, S.; Zou, W.; Zhao, H.; Hu, X. Design and analysis of an innovative deep-sea lifting motor pump. Appl. Ocean Res. 2019, 82, 22–31. [Google Scholar] [CrossRef]
- Peng, J.P. Development of research on deep-sea polymetallic nodule mining vehicles in China. Min. Mach. 2020, 48, 8–11. [Google Scholar]
- Global Sea Mineral Resources NV. PATANIA II—Technical Update. 2019. Available online: https://deme-gsr.com/news/pataniaii-technical-update/ (accessed on 15 November 2022).
- Global Sea Mineral Resources NV. Deep-Seabed Mining Robot PATANIA II Successfully Reconnected-Mission Contin-ues. 2021. Available online: https://deme-gsr.com/news/deep-seabed-mining-robot-patania-ii-successfully-reconnected-mis-sion-continues/ (accessed on 16 November 2022).
- Kang, Y.J.; Liu, S.J. Development history and prospect of deep sea polymetallic nodules mining technology. Chin. J. Nonferrous Met. 2021, 31, 2848–2860. [Google Scholar]
- Liu, S.; Yang, N.; Han, Q. Research and development of deep sea mining technology in China. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 163–169. [Google Scholar]
- Janarthanan, C.; Chandran, V.; Sundaramoorthi, V.; Viswanath, B.; Dinesh Kumar, D.; Muthuvel, P.; Rajesh, S.; Gnanaraj, A.; Venkatesan, K.; Muthukrishna, S.B. Development and testing of locomotion trials on soft sea bed soil and system performance checks of experimental undercarriage system. In Proceedings of the Twenty-eighth (2018) International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018; pp. 152–159. [Google Scholar]
- Nguyen, N.D.; Kim, S.K. Navigation and Control of Underwater Tracked Vehicle Using Ultrashort Baseline and Ring Laser Gyro Sensors. Sens. Mater 2019, 31, 1575–1587. [Google Scholar]
- Dai, Y.; Liu, S.H. Researches on deep ocean mining robots: Status and development. Robot 2013, 35, 363–375. [Google Scholar] [CrossRef]
- Teague, J.; Allen, M.J.; Scott, T.B. The potential of low-cost ROV for use in deep-sea mineral, ore prospecting and monitoring. Ocean Eng. 2018, 147, 333–339. [Google Scholar] [CrossRef]
- JOGMEC Conducts World’s First Successful Excavation of Cobalt-Rich Seabed in the Deep Ocean. Available online: https://www.jogmec.go.jp/english/news/release/news_01_000033.html (accessed on 18 November 2022).
- Rao, Q.H.; Liu, Z.L.; Xu, F.; Huang, W.; Ma, W.B. Research progress on characteristics of deep-sea soft sediment and walking performance of mining vehicle. Chin. J. Nonferrous Met. 2021, 31, 2795–2816. [Google Scholar]
- Chen, B.Z. Development and experimental study of crawler mechanism of “Kunlong 500” mining vehicle. Min. Technol. 2019, 19, 132–135. [Google Scholar]
- Hund, K.; Porta, D.L.; Fabregas, T.P.; Laing, T.; Drexhage, J. Minerals for Climate Action: The Mineral Intensity of the Clean Energy Transition; The World Bank Group: Washington, DC, USA, 2020; Available online: https://commdev.org/pdf/publications/MineralsforClimateActionTheMineralIntensityoftheCleanEnergyTransition.pdf (accessed on 23 November 2022).
- Metals Company. Revolutionizing the Mineral Supply Chain for Fast Growing EV Demand; Metals Company: Vancouver, BC, Canada, 2021; Available online: https://metals.co/investors/ (accessed on 23 November 2022).
- Nautilus Minerals Singapore PTE LTD. Seafloor Haulage System. International Application Published under the Patent Cooperation Treaty (PCT), Wo 2015/178853. A1. 26 November 2015Michael, C. Marine mining: An area of critical national need. Min. Eng. 2011, 5, 89–93. [Google Scholar]
- Alicia, C. Deep Seabed Mining: An Urgent Wake-Up Call to Protect Our Oceans; Greenpeace International: Amsterdam, The Netherlands, 2013. [Google Scholar]
- International Seabed Authority. Draft Standard and Guidelines on the Development and Application of Environmental Management Systems Developed by the Legal and Technical Commission; International Seabed Authority: Kingston, Jamaica, 2020. [Google Scholar]
Figure 1.
OMI pilot mining system configuration: (a) air lift system; (b) pump lift system [20].
Figure 1.
OMI pilot mining system configuration: (a) air lift system; (b) pump lift system [20].

Figure 2.
OMCO polymetallic nodules mining test in 1978–1979.

Figure 3.
Japanese towed-type mining collector.

Figure 4.
Indian National Institute of Polymetallic Nodules Ocean Technology (NIOT) mining test.
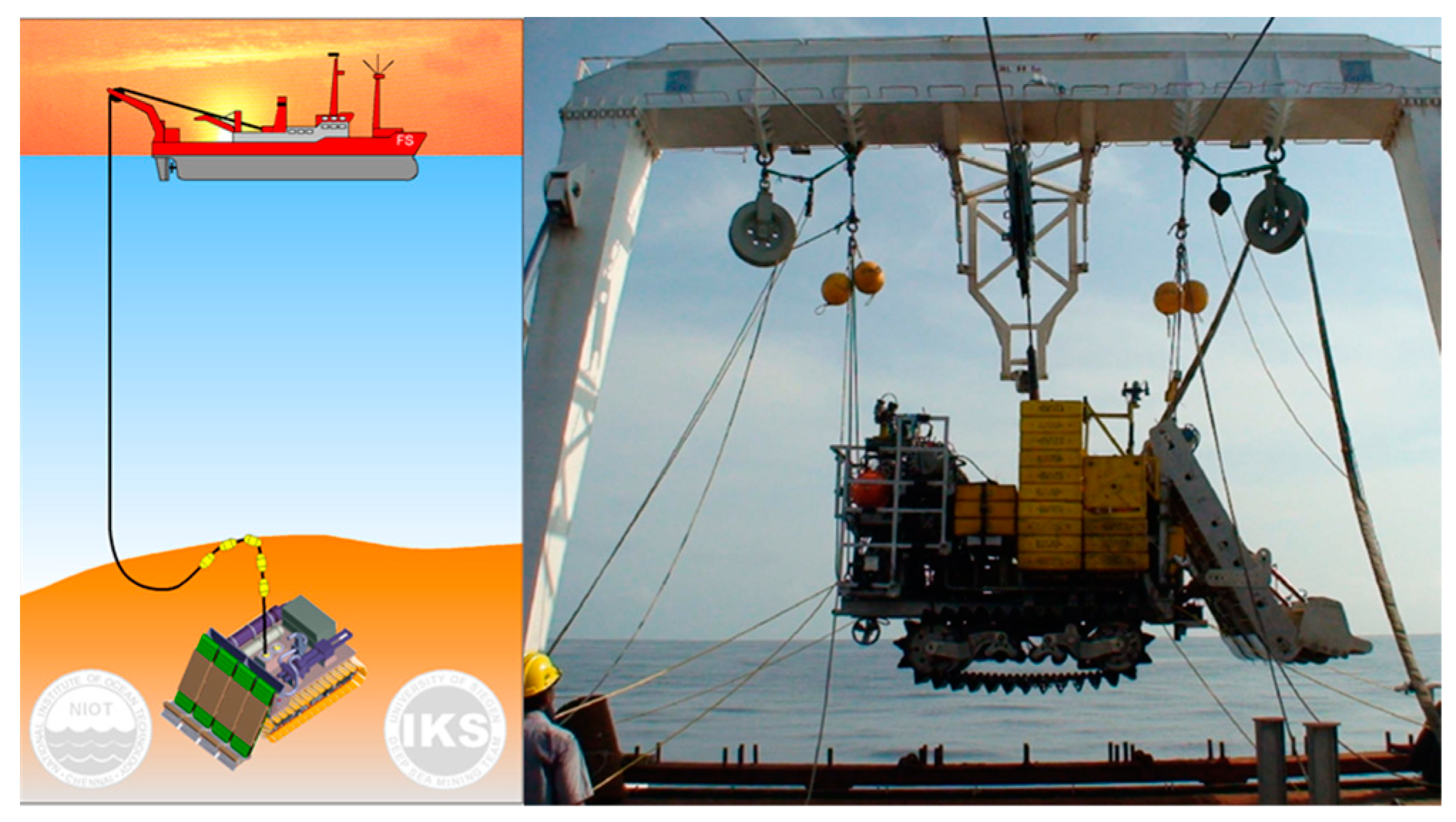
Figure 5.
Ocean mining test of polymetallic nodules in South Korea.

Figure 6.
GSR mine collector in Belgium.

Figure 7.
514 m sea trial collection vehicle.

Figure 8.
1300 m sea trial mining vehicle.

Figure 9.
Mining test in the TMC area in Canada in 2022.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Development status of deep-sea polymetallic nodule-mining technology.
| Stage | Year | Country/Organization | Depth/m | Representative Content |
|---|---|---|---|---|
| phaseⅠ (1950~2000) | 1978 | US, Canada, Germany, Japan/Ocean Management Institution (OMI) [24] | 5200 | Sea trials of polymetallic nodules |
| 1978 | American/Ocean Mineral Association (OMA) [17] | 4570 | Sea trials of polymetallic nodules | |
| 1979 | American, Dutch/Ocean Mining Corporation (OMCO) [13] | 5000 | Sea trials of polymetallic nodules | |
| 1996 | India/National Institute of Ocean Technology (NIOT); Germany/Sign University [25] | 500 | Mining and mining vehicle walking and collection test | |
| 1997 | Japan/polymetallic tuberculosis mining system research and development project [26] | 2200 | Towing-type mining test | |
| phaseⅡ (2000~2020) | 2001 | China/Changsha Institute of Mining Research, Changsha Research Institute of Mining and Metallurgy [27,28] | 143 | Mining system linkage test |
| 2002 | Japan/Japan Oil,Gas & Metals National Corp (JOGMEC) [9] | 1600 | Walking test of the mining collector | |
| 2006 | India/National Institute of Ocean Technology (NIOT) [25] | 450 | Mining vehicle sea trials | |
| 2012 | Japan/Japan Oil,Gas & Metals National Corp (JOGMEC) [29] | 1600 | Collection and test of the mining vehicle | |
| 2013 | Korea/Korea Institute of Ocean Science and Technology (KIOST) [30,31] | 1370 | Mining vehicle sea trials | |
| 2017 | Belgian/Global Sea Mineral Resources (GSR) [32] | 4571 | Walking test of the mining collector | |
| 2018 | Dutch/Royal IHC Corporation (Royal IHC) [9] | 300 | Mining car walking sea trials | |
| 2018 | China/Changsha Research Institute of Mining and Metallurgy [33] | 514 | Mining vehicle collection and walking sea trials | |
| phase III (2020~) | 2021 | Belgian/Global Sea Mineral Resources (GSR) [34,35] | 4500 | Mining test and environmental impact monitoring |
| 2021 | China/Ocean Association, Changsha Research Institute of Mining and Metallurgy, Changsha Research Mining Institute [36,37] | 1300 | Mining system linkage test and environmental monitoring test | |
| 2022 | Canada/The Metals Corporation TMC | 4400 | Mining system linkage test and environmental impact monitoring |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Cheng, Y.; Dai, Y.; Zhang, Y.; Yang, C.; Liu, C. Status and Prospects of the Development of Deep-Sea Polymetallic Nodule-Collecting Technology. Sustainability 2023, 15, 4572. https://doi.org/10.3390/su15054572
AMA Style
Cheng Y, Dai Y, Zhang Y, Yang C, Liu C. Status and Prospects of the Development of Deep-Sea Polymetallic Nodule-Collecting Technology. Sustainability. 2023; 15(5):4572. https://doi.org/10.3390/su15054572
Chicago/Turabian StyleCheng, Yangrui, Yu Dai, Yanyang Zhang, Caihua Yang, and Chenglong Liu. 2023. "Status and Prospects of the Development of Deep-Sea Polymetallic Nodule-Collecting Technology" Sustainability 15, no. 5: 4572. https://doi.org/10.3390/su15054572
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.