
Review of State Estimation and Remaining Useful Life Prediction Methods for Lithium–Ion Batteries

China Huaneng Group, Clean Energy Research Institute (CERI), Beijing 102209, China
*
Author to whom correspondence should be addressed.
Sustainability 2023, 15(6), 5014; https://doi.org/10.3390/su15065014
Submission received: 9 February 2023
/
Revised: 28 February 2023
/
Accepted: 7 March 2023
/
Published: 11 March 2023
(This article belongs to the Special Issue Climate Change and Sustainability: Collective Wisdom in the Solar Energy Sector)
Abstract
:The accurate estimation of the state of charge, the state of health and the prediction of remaining useful life of lithium–ion batteries is an important component of battery management. It is of great significance to prolong battery life and ensure the reliability of the battery system. Many researchers have completed a large amount of work on battery state evaluation and RUL prediction methods and proposed a variety of methods. This paper first introduces the definition of the SOC, the SOH and the existing estimation methods. Then, the definition of RUL is introduced, and the main methods are classified and compared. Finally, the challenges of lithium–ion battery state estimation and RUL prediction are summarized, and the direction for future development is proposed.
1. Introduction
Lithium–ion batteries have the advantages of high energy density, low self-discharge and long life, and have been used in many fields [1,2]. Given the background of an expanding lithium–ion battery global market, related technical research such as state-of-charge (SOC) estimation needs to be gradually improved to effectively ensure the promotion and application of lithium–ion batteries in multiple scenarios. Accurate estimation of the SOC plays an important role in preventing battery overcharge, overdischarge and extending the battery cycle life. However, lithium–ion batteries are highly nonlinear, and their SOC is affected by many factors, making it difficult to accurately estimate the SOC. Therefore, the SOC estimation method of lithium–ion batteries is of widespread concern.
In addition, in the continuous charging and discharging process of lithium–ion batteries, battery performance will deteriorate with the decrease in capacity and increase in impedance; this may induce battery faults, such as internal short circuits and thermal runaway, resulting in equipment and system failure and catastrophic accidents [3]. Therefore, it is also critical to accurately estimate the state of health (SOH) and predict the remaining useful life (RUL) to improve the reliability of the battery [4].
At present, some scholars have summarized and solved the estimation and prediction methods of the SOC, the SOH and the RUL. Reference [1] summarized the methods and models for SOH estimation and compared their advantages and disadvantages, but the methods are not well classified or comprehensively covered. Reference [2] provided a coherent review of battery state estimation and RUL prediction techniques and provided an available commercial dataset for analysis; however, the relationship between these methodologies is not clearly explained. Reference [5] reviewed model-based methods and data-driven methods for SOC estimation, but the models of battery are not compared in detail. With the development of the battery industry, there have been a lot of innovations in battery state estimation and life prediction methods. However, previous reviews cannot fully cover innovative methods. Thus, this paper explains and summarizes recent extensive scholarly research.
The structure of this paper is as follows: Section 1 introduces the SOC estimation methodology. Section 2 introduces the SOH estimation methodology. Section 3 summarizes the estimation method of RUL. Section 4 summarizes and suggests possible future research directions based on the existing problems in current research.
2. SOC Estimation Method
2.1. Classification of SOC Estimation Methods
Battery SOC refers to the available state of the remaining charge in the battery. It is the ratio of the remaining charge margin of the battery to the nominal (rated) charge capacity as shown in Figure 1. Generally, it is expressed as follows:
In this paper, the SOC estimation methods for a lithium–ion battery are summarized into the following four categories [5]:
(1) The experiment-based SOC estimation method [6] involves the accurate estimation of the SOC by experimentally measuring the value of cell features;
(2) The model-based SOC estimation method [7,8] includes the equivalent circuit model, the electrochemical model and other relevant battery models which are usually employed to estimate the state parameters of the battery’s SOC;
(3) The data-driven SOC estimation method [9] fits and combines a large number of data to estimate the battery’s SOC through machine-learning;
(4) The fusion of multiple methods [10] aims to balance the accuracy of estimation and reduce the calculation time. These multi-class methods learn from each other.
Figure 2 shows the selection of the estimation methods for the SOC.
2.2. The Experimental SOC Estimation Method
2.2.1. Ampere Integration
Ampere–hour integration (also known as the current integration method or the Coulomb counting method) estimates the SOC of the battery through the accumulated charge and discharge. Compared with other SOC estimation methods, the current integration method is relatively reliable and can dynamically estimate the SOC of the battery, thus, it is widely used in real applications. It is expressed as:
where SOC is the state of charge at time t; SOC0 is the SOC at the beginning time of t0; CN is the nominal capacity of the battery under the current standard conditions; η is the coulomb efficiency; I is the current, which is negative when charging and positive when discharging. The factors affecting the accuracy of the ampere integral method can be seen from Equation (2):
(1) The initial SOC0 is mainly related to the sampling accuracy and frequency of the current sensor;
(2) The Coulomb efficiency η is deeply affected by the working state of battery (e.g., charged state, temperature, current, etc.), and is difficult to measure accurately;
(3) The available capacity CN is affected by battery aging and operating conditions (charge/discharge ratio, temperature, etc.).
Due to error accumulation, the ampere–hour integration method does not meet requirements for accuracy of SOC estimation. Some scholars have carried out research on improving the accuracy of the ampere–hour integration method. Reference [11] tested the lithium iron phosphate power battery and compared the importance of various parameters for improving the accuracy of SOC estimation. The results showed that the initial SOC correction was the most important for improving the accuracy of the amp–hour integration method. Reference [12] points out that in a simulation process, if the test current is not corrected in time, it will lead to large cumulative measurement errors due to the open-loop working mode of ampere–hour integration. At the same time, reference [12] proposed the ampere–hour integral method with capacity correction for the error caused by the traditional method which treats the available capacity of the battery as a fixed value. Reference [13], focusing on the error caused by the inability to update the Coulomb efficiency online in the traditional amp–hour integration method, proposed an amp–hour integration method to modify the electricity after piecewise integration by adopting various Coulomb efficiencies.
2.2.2. The Open-Circuit Voltage-Based Method
Since the terminal voltage of the battery has a fixed functional relationship with the SOC under the condition of long-term standing, the battery’s SOC can be obtained by measuring the curve corresponding to the open circuit voltage (OCV) and the SOC [14]. When the ampere–hour integration method is used, it often relies on the OCV–SOC curve to calibrate at the beginning/end of charge and discharge. However, there are three problems with the open-circuit voltage method:
(1) When measuring open-circuit voltage, the battery needs to be rested for a long time to achieve voltage stability, which is difficult for real-time applications;
(2) It is difficult to determine how long the rest time is;
2.2.3. Other Methods
Electrochemical impedance spectroscopy uses a small amplitude sinusoidal AC signal to perturb the electrochemical power supply system. By measuring the battery impedance at different frequencies, the internal reaction mechanism of the battery that is most relevant to the change in the battery’s SOC is found, so as to estimate the battery’s SOC value [15,16,17]. Electrochemical impedance spectroscopy can quickly and directly reflect the dynamic characteristics of batteries, and can decouple the factors affecting the SOC. However, it is difficult to measure electrochemical impedance spectroscopy in practical applications.
The load voltage-based method is also commonly used to estimate the SOC. Since the variation law of load voltage on the SOC is similar to that of an open-circuit voltage with SOC, the SOC can be roughly calculated based on voltage variation [18]. This method has the advantages of simple calculation and high estimation efficiency. However, there is a “platform area” [5] in the relationship curve between the terminal voltage and SOC of the lithium battery. As shown in Figure 4, a certain open-circuit voltage in the platform area corresponds to a wide capacity range, and an inaccurate terminal voltage estimation within this range will lead to a large SOC estimation error. In addition, due to the existence of polarization voltage, the variation in battery terminal voltage is very different when the current changes rapidly, which will also introduce errors in the SOC calculation.
2.3. The Model Method
The lithium–ion battery model includes an external characteristic model and an electrochemical model; both can be used for SOC calculation.
2.3.1. SOC Estimation Method Based on the Electrical Model
The method of SOC estimation based on the external characteristic model is relatively simple, involves less computation and is easier to apply in engineering. The electrical model includes the equivalent circuit model and the OCV–SOC models. Commonly used equivalent circuit models include the Rint model, the PNGV model [20], the nth-order Thevenin model [20,21] (nth-order RC model), the GNL model [20], etc. The comparison of different models is listed in Table 1.
The Rint model is the simplest equivalent circuit model, which consists of an ideal voltage source and an internal resistance in series. The model is simple, and the model parameters are easy to measure. However, it cannot reflect the transient process of the battery and has low accuracy and a small application range. Compared with the Rint model, the Thevenin model adds an RC circuit to reflect the polarization process inside the cell. The more RC circuits added, the more accurate the circuit model and the higher the computational complexity and amount. The second-order Thevenin model is also known as the dual polarization (DP) model, in which one RC circuit represents the electrochemical polarization of the battery, and the other represents the concentration polarization of the battery. However, the Thevenin model does not consider the change in open-circuit voltage and self-discharge caused by load current over time. Compared with the 1st order Thevenin model, the PNGV model adds a capacitor in the loop to describe the change in the open-circuit voltage with the current integral. The GNL model integrates the advantages of the above three models. It not only reflects the ohmic polarization, the electrochemical polarization and the concentration polarization processes of the battery, but also solves the problem of the open-circuit voltage affected by the integral load current and the self-discharge of the battery. It has a wide range of applications, but the complexity of the model and the amount of calculation increase at the same time.
The estimation method based on the OCV–SOC curve can also estimate the lithium–ion battery’s SOC. The main fitting models [22] include the Shepherd model (Equation (3)), the Unnewehr universal model (Equation (4)), the Nernst model (Equation (5)) and the compound model (Equation (6)):
whereis the terminal voltage of the battery at time step k; is the current at time step k; E0 is the open circuit voltage after the battery is fully charged; R is the internal resistance of the battery; SOCk is the SOC of kth time step; K0, K1, K2 and K3 are the parameters to be fitted. A detailed description and comparison of the above models are shown in Table 1.
When estimating SOC based on the electrical model, the battery system is usually discretized, the SOC is taken as the system state and the SOC is estimated using a filter based on the ampere integration method.
Taking the 1st order Thevenin equivalent circuit as an example, as shown in Figure 5, the discretized equation of state and the output equation are shown in Equations (7) and (8), respectively:
where U1,k is the voltage of the battery polarization capacitor; subscript k is the current time; Ts is sampling time; and wk and vk are system noise and observation noise, respectively. They are Gaussian white noise with mean is zero, covariance Q and covariance R.
Uoc (SOCk) is the function of open circuit voltage Uoc with respect to SOC, which can be obtained by fitting the curve of OCV–SOC. R1, C1 are the internal resistance and capacitance of polarization, respectively. R0 is the ohmic internal resistance of the battery; QI is the actual total capacity under the current I. The battery’s SOC can be estimated by combining the filter and its derived algorithm.
The commonly used filters include the Kalman filter (KF), the particle filter (PF) and the H infinite filter (HIF).
The KF can use the output data to continuously revise the system state variables and provide the optimal estimation of the state quantity at the next moment [23]. The KF is widely used in the research of battery SOC because of its good resistance to noise and low dependence on an initial value.
Since lithium–ion batteries are nonlinear systems, the extended Kalman filter (EKF) is used to estimate the SOC [24], which solves problems caused by system nonlinearity by performing a Taylor expansion at the operating point.
According to Equations (7) and (8), the error of the EKF comes from the following three points:
(1) Only the first-order term is taken when the Taylor expansion is carried out on the nonlinear system at the operating point, and the higher-order term is ignored;
(2) Noise wk and vk ,and their covariances Q and R, are constants and do not change dynamically;
(3) Inaccurate battery model parameters of R0, R1 and C1 will lead to large errors.
For problem (1), the unscented Kalman filter (UKF) is employed [25]. The UKF eliminates the larger error caused by the partial derivative of the first order using the Taylor expansion of the nonlinear function in the EKF. However, this method needs accurate statistical characteristics for the system process noise and the observation noise. In addition, because the calculation process is based on a matrix, when there are drastic fluctuations of voltage and current in the system, the matrix cannot guarantee strict positive quality, resulting in divergence of state estimation and unstable estimation [26]; the amount of calculation is also large. To solve the problem of the UKF, some scholars proposed the square root unscented Kalman filter (SR–UKF) and ensured the semi-positive nature of the covariance matrix by Cholesky decomposition factor updating and matrix QR decomposition, which increases the stability of calculation [27]. However, problem (2) still remains.
The adaptive extended Kalman filter (AEKF) method was proposed by reference [28] to solve problem (2). Based on the EKF, the AEKF focused on the problem of filtering divergence caused by the unknowability of the covariance matrices Q and R. A forgetting factor is added to the EKF, and the covariance of error is corrected by the observed value. The convergence rate is improved by dynamic changes in Q and R. However, the AEKF does not consider the change in model and equation parameters, and the fixed forgetting factor will also introduce errors.
The idea of the PF is based on the Monte Carlo method, which uses sets of particles to represent probabilities, and can be applied to any form of state–space model. Compared with the KF, the PF is a nonlinear and non-Gaussian filtering method, which does not make a linear assumption or a Gaussian hypothesis of posterior probability. In reference [29], the PF was used to estimate the SOC of Fe–phosphate lithium–ion batteries, and the results showed that it could well describe the external characteristics of nonlinear systems and significantly improve the prediction accuracy of the SOC. However, particle degradation was prone to occur. To solve problems such as particle scarcity and noise disturbance, reference [30] proposed an improved estimation algorithm, the unscented particle filter (UPF), to achieve accurate SOC estimation. However, the UPF requires high computing ability for hardware devices.
The HIF method is an improved algorithm based on the EKF. In the HIF, Q and R are parameters designed according to the prior knowledge of wk and vk. Compared with the EKF and the PF, model inaccuracy and noise uncertainty can be better tolerated [31,32]. In reference [33], the HIF algorithm was used to obtain the SOC estimation results with high accuracy and robustness. Reference [34] uses a dual HIF algorithm to estimate the SOC, which can stabilize the estimation error within 2%. Most of the HIF algorithms can achieve high accuracy; however, due to their robustness, there is still a problem of insensitivity to system state and model uncertainty to noise. In reference [35], a nonlinear observer based on HIF was proposed to estimate the SOC for lithium–ion batteries. Experimental results show that this algorithm can suppress model errors under different working conditions, but the algorithm is slow to respond to changes in model parameters.
Similar to filters, observer-based methods can also observe model states in real time by calculating systematic errors [36]. Among them, the sliding mode observer (SMO) is a closed-loop state observer, and the output variable provides correction for the observer system. Due to its closed-loop characteristics, the SMO has strong robustness, low sensitivity to battery model structure and parameter disturbance [37], no prior information to predict noise [38] and its estimation accuracy is close to that of the PF. Reference [39] proposes an SOC estimation method for lithium–ion batteries based on an improved SMO, which inherits the good robustness of the SMO.
2.3.2. SOC Estimation Method Based on the Electrochemical Model
Although the electrical model is simple, it cannot fully reflect the state change caused by the change in the internal mechanism of the battery. The electrochemical model of the lithium–ion battery describes the chemical reaction inside the battery and has a more definite physical meaning. The battery electrochemical model mainly includes a pseudo two-dimensional (P2D) model [40], a single particle (SP) model and a simplified P2D model. The comparison of the three models is also shown in Table 1.
The P2D model regards the lithium battery as a structure composed of electrodes (positive and negative), a diaphragm and an electrolyte full of numerous spherical solid particles. A series of partial differential equations (PDE) is used to describe the dynamic mechanism inside the battery. It can carry out accurate battery state estimation and has universality and scalability. It is suitable for batteries of different material systems and can be developed and extended to more complex multi-field coupling models. However, for complex models, in addition to excessive parameters, it is also difficult to find analytical solutions for PDE [8].
The SP model is the simplest electrochemical model of the lithium battery, which is simplified from the P2D model. In the SP model, two spherical particles are regarded as the positive and negative electrodes of the battery, respectively. It is assumed that the embedding and ejection process of lithium ions occurs on the spherical particles, and the concentration of the electrolyte and its internal potential are considered constant. The single particle model is simple in structure and small in calculation. However, the model assumption is not valid under the conditions of high rates of charge and discharge, so it will introduce large errors.
Since the equations of the P2D model are too complex and the accuracy of the SP model is poor, many scholars have proposed different simplified methods for the P2D model in different application scenarios to ensure calculation accuracy and reduce the amount of calculation. The existing simplification methods mainly include geometric structure simplification, solid–liquid diffusion process simplification and transformation simplification by mathematical algorithm. In reference [41], mathematical equations were established to describe the internal physical and chemical behaviors of power batteries during charging and discharging based on the porous electrode theory and the concentrated solution theory; the finite analysis method was used to grid and discretize the PDE, reducing its order to an ordinary differential equation. However, the simplified model cannot solve the inherent problem of excessive P2D parameters and will reduce the model accuracy to varying degrees. It is still worth thinking about how to balance the amount of calculation and the model’s accuracy [42,43,44,45].
When calculating the SOC based on the electrochemical model, different from Equation (1), the SOC of the electrochemical mechanism model (such as the P2D model and the SP model) is divided into surface SOC and average SOC [46], which can be expressed as
where SOCsurf and SOCbulk represent surface SOC and average SOC, respectively. The parameters θs,i and represent electrode utilization and the average utilization rate of the electrode, respectively, while θs,i is the ratio of solid lithium ion concentration to the largest solid lithium ion concentration ratio. The electrode utilization ratio of θs0% and θs100% is for 0% SOC and 100% SOC, respectively.
Similar to the calculation of the SOC based on an external characteristic model, the SOC of an electrochemical model can be estimated by a filter or observer.
2.4. Data-Driven Methods
The relationship between battery parameters and the SOC is complex and non-linear, making it difficult to establish a model with traditional mathematical methods [47]. Data-driven methods do not rely on a specific model of the battery, and can directly rely on the mapping relationship between the input and output of the system to estimate the SOC. At present, widely used data-driven methods include neural networks, regression analysis, etc.
2.4.1. Neural Networks and their Improvement Method
The SOC estimation method based on neural networks takes the battery operating data, such as voltage, current and other parameters as input and SOC as output and trains the system through sample data to find the mapping relationship between various parameters [48].
The basic structure of a neural network (NN) consists of a three-layer formation as shown in Figure 6. The input layer takes the vector of instantaneous current, voltage and temperature values. The output layer is the instantaneous SOC value. By training the NN, it is able to form a non-linear map that accurately models the input–output relationship without any prior knowledge of the internal structure of the battery [49]. The relationship between the input layer and the output layer is developed using a suitable number of hidden layers, hidden neurons and an activation function. The SOC in the output layer can be expressed by
A back propagation (BP) neural network is a typical neural network algorithm. Its network structure is simple, and it has a strong nonlinear mapping ability. Reference [50] summarized the influencing factors of SOC estimation and proposed a method of SOC estimation based on a BP neural network. However, BP neural networks tend to easily converge to local optimum. In addition, the network structure is different, making it easy for non-convergence to appear. Currently, there exists a number of common NN architectures. Recurrent neural network (RNN) is a neural network that takes sequence data as input and makes recursion in the evolution direction of the sequence; all loop nodes are connected by a chain, which is suitable to estimate the SOC and other temporal data [51]. However, during its training, gradient vanishing and gradient explosion will appear. To solve these two problems, some scholars propose a long short-term memory (LSTM) neural network [52,53,54], a gated recurrent unit (GRU) neural network [55,56] and a Bi LSTM neural network [57]. LSTMs solve the problem of gradient vanishing and gradient explosion during long sequence training. Compared to an ordinary RNN, an LSTM can perform better in longer sequences. A GRU is an improvement on an LSTM, with the same accuracy as LSTM, but with fewer parameters and faster computation. In reference [58], an RNN with the GRU is established to evaluate the SOC for a LIB. The ensemble optimization method based on a Nadam and AdaMAx optimizer is used to improve the training operation and determine the optimal parameters.
However, all neural networks and their derivative methods have three disadvantages: they need to collect a large amount of data, which is not applicable for online estimation; training results are too dependent on sample quality; and the overfitting problem appears easily since the battery’s model is not involved.
2.4.2. The Regression Analysis Method and Its Improvement
The regression analysis method involves processing a large number of statistical data to determine the correlation between dependent variables and some independent variables. It establishes a regression equation with good correlation and can be extrapolated to predict the future change in dependent variables.
A support vector machine (SVM) is an algorithm that uses classification and regression analysis techniques to process data [59]. This method is effective in high-dimensional pattern recognition and nonlinear regression problems. An SVM attempts to construct hyperplanes in high-dimensional space in order to separate data of one class from another as shown in Figure 7 [60]. An optimal separation boundary is achieved when the distance from the hyperplane to the nearest data point of any class is maximized. Reference [61] employed SVM to predict the SOC of a LIB as a function of cell current, voltage and temperature. However, when the sample size is expanded to a certain point, the complexity brought by the SVM optimization will be significantly increased, and the accuracy of the model will decrease [62,63].
To solve the above problems, reference [62] proposed a least squares SVM, which converts the learning problem of the standard SVM into a problem of solving linear equations with fewer variables and less computation, with faster solving speed and better robustness.
2.5. The Joint Method
Due to the advantages and disadvantages of each method, some scholars use the integration of multiple methods to estimate the SOC, with complementary advantages. The fusion types include the fusion of a model-based method and a data-driven method, the fusion of different data-driven methods, etc. Reference [64] proposed a convolutional neural network (CNN) and an LSTM integration model, which established a mapping relationship between the SOC at the current moment and the discharge data of lithium batteries at several historical moments, improving the accuracy of SOC estimation. Reference [65] analyzed the nonlinear relationship between the OCV and the SOC based on the Thevenin equivalent circuit model and combined the models, employing improved UKF with neural networks to estimate the SOC; this was more accurate than the ordinary UKF.
After a comprehensive analysis of the above methods for estimating the lithium–ion battery’s SOC, the advantages and disadvantages of common methods for estimating the lithium–ion battery’s SOC are compared, as shown in Table 2.
3. RUL Prediction Method
3.1. Classification of RUL Prediction Methods
Due to the electrochemical side reaction in the anode and cathode electrolyte of the battery, as well as the influence of mechanical stress, manufacturing process defects, environmental temperature and other external factors, the degradation of batteries has become a complex problem [66]. Determining the RUL of a battery under different operating conditions is of great significance to accurately estimate the battery replacement cycle or maintain the battery [67]. It is generally believed that when the real-time capacity of lithium–ion battery drops to 80% of the rated capacity, the critical value of battery failure is reached [68].
The RUL refers to the number of charge/discharge cycles before the battery health state has deteriorated to a point where it reaches EOL [69]. As Figure 1 shows, the RUL is the remaining cycle numbers of the battery from the current SOH to EOL. Thus, the SOH and the RUL can be estimated with the same methodology. The SOH estimation methods are not further reviewed in this paper. Similar to the SOC estimation, the RUL estimation and prediction methods for the lithium–ion battery comprise a model-based method, a data-driven method and a joint method since the RUL can also be regarded as a battery state. Different from the SOC, the RUL is not an instantaneous characteristic so it can be predicted through an empirical model, a semi-empirical model and a time series prediction data-driven method.
3.2. The Model-Based Method
As Figure 8 shows, according to different modeling mechanisms, that the model-based method can be categorized into an empirical model, a semi-empirical model, an electrical model and an electrochemical model.
3.2.1. Empirical Model
In empirical models, battery capacity attenuation is represented as a mathematical function of number of cycles. Different mathematical functions are used to describe the battery capacity deterioration trend. Most empirical models for RUL estimation are developed based on a single exponential model [70], a double exponential model [71], a linear model [72], a polynomial model [73], a Verhulst model [74], etc.
where n is the equivalent cycle number; Cmax is the remain capacity at nth cycle; and a, b, c, d, e are constant coefficients to be fitted.
The empirical model only needs one function to evaluate the RUL, which is easy to operate and small in calculation. However, due to its lack of real physical meaning, the estimation accuracy is low.
3.2.2. The Semi-Empirical Model
The semi-empirical model considers the influence of various physical factors on battery aging by adopting the stress factors related to battery aging and modeling the change in stress factors. Stress factors related to battery aging are usually modeled based on the inverse power law [75], the Arrhenius model [76] and the double exponential model. The stress factors can be classified according to different criteria:
(1) Battery parameters including the SOC [77], solid electrolyte interphase (SEI) film formation and capacity plummeting [78], etc.;
(2) Operating conditions including charge or discharge rate [74], charge or discharge cut-off voltage [79], depth of discharge (DOD) [80,81], Ampere hour (Ah) throughput [82], etc.;
(3) Operating environment including temperature [81], etc.
Different stress factors can be coupled to obtain the comprehensive capacity decline rate to redevelop a basic empirical model. Reference [83] applied a semi-empirical model related to normal temperature, abnormal temperature and discharge rate to evaluate the RUL. The result showed high accuracy with an estimation error of 2.22%. Besides discharge rate and temperature, reference [84] coupled the stress factor of cut-off voltage, the discharge rate and temperature to simulate the battery aging process. Reference [78] established a capacity decline model based on the SEI films formation mechanism. However, the semi-empirical model is no longer applicable when the operating conditions of the battery change significantly since the variation in stress factors cannot be modeled [85].
3.2.3. The Electrical Model
Similar to the SOC estimation, the RUL can also be regarded as a battery state. Thus, model-based methods for SOC estimation can also be employed to predict the RUL. Reference [86] proposed an improved UPF to predict the RUL with an error of less than 5%. Reference [87] proposed a new PF framework based on a conditional variational self-coder for RUL prediction of lithium batteries. In the process of particle resampling, a reweighting strategy is introduced to prevent the loss of particle diversity. Compared with the traditional method, this method improves the prediction accuracy.
3.2.4. The Electrochemical Model
The electrochemical model describes the influence of internal chemical and physical reactions on battery aging, such as electrical conductivity loss, activated substances loss and lithium–ion loss. However, the complexity of the electrochemical model and poor dynamic accuracy limit its application in RUL prediction with a large number of aging related parameters to be identified as compared to the electrical model [88]. Reference [89] employed the mixtures of the inverse Burr distribution with inverse Gaussian and inverse Weibull distributions to analyze a battery dataset and predict the RUL through the Monte Carlo method.
3.3. The Data-Driven Method
The data-driven method selects some historical data as training samples, and then uses the training algorithm to predict the RUL after training. This method avoids the complex mathematical model establishment and expertise required for traditional methods. It can be roughly classified as a time series prediction method and feature-based method.
3.3.1. The Time Series Prediction Method
The time series prediction method predicts future capacity directly based on the change trend of historical capacity time series data.
The regression model, NN and entropy-based methods are usually employed to predict using time series. Reference [90] enhanced a PF-based empirical method by introducing a NN to model battery degradation trends under various operation conditions to improve their generalization and nonlinear representing ability, and recursively update the NN model’s parameters with a particle filter to reduce the degeneracy and impoverishment of the PF. Reference [91] proposed an RUL prediction method based on an autoregressive integrated moving average (ARIMA) model. However, ARIMA model requires the stability of the time series data and has high requirements for battery operating conditions. Reference [92] constructed a CNN model for RUL prediction with an accuracy of over 90%. However, gradient disappearance is a typical problem for all NN methods. The following problems of the time series prediction method still require solution:
- (1)
- Low accuracy for local capacity variation;
- (2)
- Not applicable to predict the RUL in the battery’s entire life cycle due to different degradation characteristics in each aging period;
- (3)
- High dependence on the training set and data quality;
- (4)
- Problem of overfitting.
3.3.2. The Feature-Based Method
The feature-based method improves the robustness of the basic time series prediction method by considering health factors (HFs) which indicate battery aging. In comparison to direct time series prediction, the feature-based method has a better performance in predicting the RUL curve’s local fluctuations (e.g., the capacity regeneration effect).
The procedure for the feature-based data-driven method is summarized as data acquisition, data preprocessing, feature extraction, feature election and data-driven prediction, as shown in Figure 9.
The battery HFs extracted are mainly derived from the voltage, current and temperature curves. The HFs that have appeared in other researches are summarized in Table 3 [93,94,95,96,97,98]. Then, feature selection is conducted if necessary. Since there are various HFs related to battery aging and the HFs are coupled together, in order to reduce the calculation burden, some researchers analyze the correlation of the HFs with the RUL and select the most relevant HFs through ranking. The Pearson coefficient, the Spearman coefficient and gray relation analysis are usually used to analyze the correlation between health factors and capacity attenuation. In reference [95], HFs that are highly correlated with the capacity degradation curve are chosen by means of gray relation analysis and used to predict the RUL with GPR. Dimension reduction means are also employed to reduce the size of HFs series to figure out the most relevant part. Typical dimensionality reduction methods include Principal Component Analysis (PCA) [96], Independent Component Analysis (ICA) [96] and autoencoder [96]. Moreover, the performance of raw HFs may not be fully satisfactory due to the complexity of the underlying degradation process. To reduce the possible deviation of the HF from the degradation process, the Box–Cox transformation is sometimes used to enhance the linear relationship between the HF and the system’s health status [99,100].
Typically, the NN, the regression method and their improvement are employed to predict the RUL with an indicator of battery HFs. Reference [101] trained the RNN model with constraint derived from prior physical knowledge to forecast the RUL. Reference [58] employed a hybrid method with a PF and GPR to predict the aging trend sequence and residual sequences. The proposed approach showed wide generality and reduced errors. Reference [69] optimized the deep learning neural network (DLNN) with evolutionary algorithms to predict the RUL.
3.4. The Joint Method
The joint method is a combination of the model-based method and the data-driven method and the combination of various data-driven methods that fuses the merits of both methods. To improve prediction accuracy, reference [102] proposed an SVR-based model with the approach of the normal particle swarm optimization (PSO). Reference [103] proposed a joint method extreme learning machine (ELM), grey wolf optimization (GWO) and differential evolution (DE). Reference [104] proposed a neural network-based method combining LSTM with PSO and an attention mechanism for RUL prediction [105]. However, all joint methods share the demerits of high computational complexity and uncertainty.
The RUL prediction methods are compared in Table 4.
4. Conclusions
This paper summarized the techniques, models and algorithms used in lithium–ion battery state estimation and RUL prediction in recent years and provides a comparison of various methods. The actual operating conditions and environment of lithium–ion batteries vary greatly. Batteries are highly complex, dynamic and nonlinear electrochemical systems, which impose some challenges in practical application for the existing lithium–ion battery SOC estimation methods and RUL prediction methods.
The engineering application capability of existing SOC estimation methods is poor. It is difficult for an experimental method to estimate the SOC during battery operation, and the application of the model-based method is limited because it relies heavily on the accuracy of the battery model.
Some RUL prediction methods have low capability for generalization. In terms of the empirical model and semi-empirical models, model accuracy is greatly affected by battery parameters and working conditions, so they are difficult to generalize in real practice. In terms of the data-driven method, the training data set is all the experimental data obtained under a single working condition, which makes it difficult to use for covering complex scenarios. The parameters of the data-driven method are usually fixed on most occasions, hence it is easy to overfit when applied to other battery models and conditions.
- (1)
- The balance between calculation time and accuracy is difficult to reach. Due to the limitations in the number of computations required, most algorithms are not suitable for online application. In addition, since batteries are usually integrated as modules, calculations multiply in the real world which makes real-time application a challenge;
- (2)
- There are only relevant studies on single batteries at present; however, factors such as the inconsistency of batteries in battery strings in large-scale lithium battery systems such as in an energy storage power station, will cause the original method to no longer be applicable. At present, there is little research on the state estimation and RUL prediction methods of battery packs.
These problems make most of the lithium–ion battery state estimation and the RUL prediction methods difficult to promote on a large scale, but these challenges also show the future direction for further research on state estimation and RUL prediction of lithium–ion battery:
- (1)
- Develop the pack-level, cluster-level, system-level battery equivalent model to reduce the amount of calculation required for state evaluation and RUL prediction;
- (2)
- Enhance state estimation and RUL prediction methods with joint algorithms to compensate for weaknesses and improve the algorithm’s capacity for generalization;
- (3)
- Establish a multi-physical field coupling model for lithium–ion batteries to improve the accuracy of battery status assessment and RUL prediction.
Author Contributions
Methodology, J.Z., Y.Z. and J.W.; software, Y.Z. and J.W.; supervision, M.L.; validation, J.Z. and J.W.; visualization, M.L., B.Z. and J.W.; writing—original draft, J.Z. and J.W.; writing—review and editing, J.Z., X.H. and C.L. All authors have read and agreed to the published version of the manuscript.
Funding
This study was supported by the Huaneng Group Headquarters Science and Technology Project of the Key Technology Research and System Development of Group Level Intelligence Operations Platform Construction (HNKJ21-H52) and the Fault Diagnosis Technology Research and System Development of Lithium–ion Battery Energy Storage Station Based on Mass Data (HNKJ21-H52-004).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All data used during the study are available from the NASA’s official website.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Sarmah, S.B.; Kalita, P.; Garg, A.; Niu, X.-D.; Zhang, X.-W.; Peng, X.; Bhattacharjee, D. A Review of State of Health Estimation of Energy Storage Systems: Challenges and Possible Solutions for Futuristic Applications of Li-Ion Battery Packs in Electric Vehicles. J. Electrochem. Energy Convers. Storage 2019, 16, 040801. [Google Scholar] [CrossRef] [Green Version]
- Hasib, S.A.; Islam, S.; Chakrabortty, R.K.; Ryan, M.J.; Saha, D.K.; Ahamed, H.; Moyeen, S.I.; Das, S.K.; Ali, F.; Islam, R.; et al. A Comprehensive Review of Available Battery Datasets, RUL Prediction Approaches, and Advanced Battery Management. IEEE Access 2021, 9, 86166–86193. [Google Scholar] [CrossRef]
- Elmahallawy, M.; Elfouly, T.; Alouani, A.; Massoud, A.M. A Comprehensive Review of Lithium-Ion Batteries Modeling, and State of Health and Remaining Useful Lifetime Prediction. IEEE Access 2022, 10, 119040–119070. [Google Scholar] [CrossRef]
- Su, N.K.H.; Juwono, F.H.; Wong, W.K.; Chew, I.M. Review on Machine Learning Methods for Remaining Useful Lifetime Prediction of Lithium-ion Batteries. In Proceedings of the 2022 International Conference on Green Energy, Computing and Sustainable Technology (GECOST), Miri Sarawak, Malaysia, 26–28 October 2022; pp. 286–292. [Google Scholar] [CrossRef]
- Wang, Y.; Zuo, X. State of Charge Estimation Methods and Application Scenarios of Lithium-Ion Batteries. Power Syst. Autom. 2022, 32-1180/TP, 1–15. Available online: http://kns.cnki.net/kcms/detail/32.1180.TP.20220331.1418.002.html (accessed on 14 April 2022).
- He, L.; Hu, M.; Shi, Q.; Ye, W. A staged state of charge estimation algorithm for lithium-ion batteries. Power Electron. Technol. 2020, 54, 8–11. [Google Scholar]
- Wu, L.; Pang, H.; Jin, J.; Geng, Y.; Liu, K. A Review of State of Charge Estimation Methods for Lithium Ion Batteries Based on Electrochemical Models. J. Electr. Technol. 2022, 37, 1703–1725. [Google Scholar] [CrossRef]
- Wu, C.; Hu, W.; Meng, J.; Liu, Z.; Cheng, D. State of Charge Estimation of Lithium Ion Battery Based on Maximum Correlation Entropy Extended Kalman Filter Algorithm. J. Electr. Technol. 2021, 36, 5165–5175. [Google Scholar] [CrossRef]
- Li, C.; Xiao, F.; Fan, Y.; Yang, G.; Tang, X. State of Charge Estimation of Lithium Ion Battery Based on Gated Cyclic Unit Neural Network and Huber-M Estimation Robust Kalman Filter Fusion Method. J. Electr. Technol. 2020, 35, 2051–2062. [Google Scholar] [CrossRef]
- Wang, X.; Zheng, C.; Zhang, S.; Dai, M.; Xiao, W.; Chen, X. Summary of fusing algorithm research in estimation for state of charge of battery. Sichuan Electr. Power Technol. 2021, 44, 43–46. [Google Scholar]
- Li, Z.; Lu, L.; Ouyang, M. Comparison of Methods to Improve the Accuracy of Battery SOC Estimation by Ampere Hour Integration. J. Tsinghua Univ. 2010, 50, 1293–1296. [Google Scholar]
- Luo, Y.; Qi, P.; Huang, H.; Wang, J.; Wang, Y.; Li, P. Research on Estimation Method of Ampere Hour Integration SOC Based on Capacity Correction. Automot. Eng. 2020, 42, 681–687. [Google Scholar]
- Li, K.; Zhao, L.; Zhao, B.; Ke, H.; Li, J. Stream Ampere Hour Integral SOC Estimation Method Based on Frequent Item Statistics. J. Chongqing Univ. Sci. Technol. 2022, 36, 19–27. [Google Scholar]
- Guo, B.; Zhang, P.; Wang, W.; Wang, F. Study on SOC Estimation of Lithium Iron Phosphate Battery Based on OCV–SOC Curve Cluster. Power Technol. 2019, 43, 1125–1128. [Google Scholar]
- Huang, K.; Guo, Y.; Li, Z. State of Charge Estimation of Power Lithium Ion Batteries. Power Technol. 2018, 42, 1398–1401. [Google Scholar]
- Blanke, H.; Bohlen, O.; Buller, S.; De Doncker, R.W.; Fricke, B.; Hammouche, A.; Linzen, D.; Thele, M.; Sauer, D.U. Impedance Measurements on Lead-acid Batteries for State-of-charge, State-of-health and Cranking Capability Prognosis in Electric and Hybrid Electric Vehicles. J. Power Sources 2005, 144, 418–425. [Google Scholar] [CrossRef]
- Zenati, A.; Desprez, P.; Razik, H.; Rael, S. Impedance Measurements Combined with the Fuzzy Logic Methodology to Assess the SOC and SOH of Lithium-ion Cells. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference (VPPC), Lille, France, 1–3 September 2010. [Google Scholar]
- Zeng, Q.; Zhang, X.; Fan, X. Discussion on Estimation Method of SOC of Electric Vehicle Power Battery. Electr. Meas. Instrum. 2014, 51, 76–84. [Google Scholar]
- Available online: https://www.zhihu.com/question/434952446/answer/1628793249 (accessed on 15 December 2020).
- Li, J.; Xiao, Y. Overview of Modeling Status of Lithium Ion Battery. Energy Storage Sci. Technol. 2022, 11, 697–703. [Google Scholar]
- Wu, X.; Zhang, X. Parameter Identification of Second Order RC Equivalent Circuit Model of Lithium Battery. J. Nanjing Univ. 2020, 56, 754–761. [Google Scholar]
- Park, J.H.; Kim, H.G.; Nho, E.C.; Chun, T.-W. Power conditioning system for a grid connected PV power generation using a Quasi-Z-source inverter. IEEE J. Power Electron. 2010, 10, 79–84. [Google Scholar] [CrossRef] [Green Version]
- Mao, H.; Wan, G.; Wang, L.; Zhang, Q. Estimation of Battery SOC Based on Modified Kalman Filter Algorithm. Power Technol. 2014, 38, 298–302. [Google Scholar]
- Pang, H.; Guo, L.; Wu, L.; Min, J.; Liu, K. Improved Bipolarization Model of Lithium Ion Battery Considering the Effect of Ambient Temperature and Its State of Charge Estimation. J. Electr. Technol. 2021, 36, 2178–2189. [Google Scholar]
- Hu, X. SOC Estimation and Implementation of Power Lithium Battery Based on Traceless Kalman Filter. Master’s Thesis, Central South University, Changsha, China, 2014. [Google Scholar]
- Sun, D.; Chen, X. State of Charge Estimation of Lithium Battery Based on Discrete Sliding Mode Observer. Chin. J. Electr. Eng. 2015, 35, 185–191. [Google Scholar] [CrossRef]
- Fei, Y.; Xie, C.; Tang, Z.; Zeng, C.; Quan, S. State Estimation of Lithium Battery Based on Square Root Unscented Kalman Filter. Chin. J. Electr. Eng. 2017, 37, 4514–4520+4593. [Google Scholar] [CrossRef]
- Wang, Y.; Li, L.; Ding, Q.; Liu, J.; Chen, P. Lithium-ion battery SOC estimation based on an improved adaptive extended Kalman filter. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 417–421. [Google Scholar] [CrossRef]
- Schwunk, S.; Armbruster, N.; Straub, S.; Kehl, J.; Vetter, M. Particle filter for state of charge and state of health estimation forlithium-iron phosphate batteries. J. Power Sources 2013, 239, 705–710. [Google Scholar] [CrossRef]
- Xie, C.; Fei, Y.; Zeng, C.; Fang, W. State Estimation of Vehicle Lithium Ion Battery Based on Traceless Particle Filter. J. Electr. Technol. 2018, 33, 3958–3964. [Google Scholar] [CrossRef]
- Chen, X.; Sun, D.; Chen, X. Modeling and Robust State of Charge Estimation of Lithium Ion Batteries. J. Electr. Technol. 2015, 30, 141–147. [Google Scholar]
- Liu, C.Z.; Zhu, Q.; Li, L. A state of charge estimation method based on H-infinity observer for switched systems of lithium-ion nickel-manganese-cobalt batteries. IEEE Trans. Ind. Electron. 2017, 64, 8128–8137. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Shen, W. A lithium-ion battery-in-the-loop approach to test and validate multiscale dual H infinity filters for state-of-charge and capacity estimation. IEEE Trans. Power Electron. 2018, 33, 332–342. [Google Scholar] [CrossRef]
- Da, Y.; Wan, Y.; He, W. An Adaptive Central Difference H-infinity Filter Based SOC Estimation for Lithium-ion Batteries with Measurement Noise. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 1402–1407. [Google Scholar] [CrossRef]
- Zhu, Q.; Li, L.; Hu, X.S. H-infinity-based nonlinear observer design for state of charge estimation of lithium-ion battery with polynomial parameters. IEEE Trans. Veh. Technol. 2017, 12, 10853–10865. [Google Scholar] [CrossRef]
- Zheng, Y.; Ouyang, M.; Han, X.; Lu, L.; Li, J. Investigating the error sources of the online state of charge estimation methods for lithium-ion batteries in electric vehicles. J. Power Sources 2018, 377, 161–188. [Google Scholar] [CrossRef]
- Hong, Y.; Chen, X. A Method for SOC Estimation of Lithium Battery Based on Improved Discrete Sliding Mode Observer. Ind. Control Comput. 2018, 31, 67–68. [Google Scholar]
- He, H.; Xiong, R. State of Charge Estimation of Lithium-Ion Power Battery Based on Sliding Mode Observer. J. Jilin Univ. 2011, 41, 623–628. [Google Scholar] [CrossRef]
- Du, J. Research on Estimation Algorithm of State of Charge and Health of Lithium Ion Battery Based on Sliding Mode Observer. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2018. [Google Scholar]
- Doyle, M.; Fuller, T.F.; Newman, J. Modeling of galvanostatic charge and discharge of the lithium/polymer/insertion cell. J. Electrochem. Soc. 1993, 140, 1526. [Google Scholar] [CrossRef]
- Li, Z. Study on Electrochemical Modeling and Aging State Identification of Lithium-Ion Power Battery. Master’s Thesis, Beijing University of Technology, Beijing, China, 2018. [Google Scholar] [CrossRef]
- Ahmed, R.; Sayed, M.E.; Arasaratnam, I.; Tjong, J.; Habibi, S. Reduced-Order Electrochemical Model Parameters Identification and State of Charge Estimation for Healthy and Aged Li-Ion Batteries—Part II: Aged Battery Model and State of Charge Estimation. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 678–690. [Google Scholar] [CrossRef]
- Zou, C.; Zhang, L.; Hu, X.; Wang, Z.; Wik, T.; Pecht, M. A review of fractional-order techniques applied to lithium-ion batteries, lead-acid batteries, and supercapacitors. J. Power Sources 2018, 390, 286–296. [Google Scholar] [CrossRef] [Green Version]
- Hussein, A.A. Capacity fade estimation in electric vehicles Li-ion batteries using artificial neural networks. IEEE Energy Convers. Congr. Expo. 2013, 51, 677–681. [Google Scholar] [CrossRef]
- Moura, S.J.; Argomedo, F.B.; Klein, R.; Mirtabatabaei, A.; Krstic, M. Battery State Estimation for a Single Particle Model with Electrolyte Dynamics. IEEE Trans. Control Syst. Technol. 2017, 25, 453–468. [Google Scholar] [CrossRef]
- Schmidt, A.P.; Bitzer, M.; Imre, Á.W.; Guzzella, L. Experiment-driven electrochemical modeling and systematic parameterization for a lithium-ion battery cell. J. Power Sources 2010, 195, 5071–5080. [Google Scholar] [CrossRef]
- Yin, A.; Zhang, W.; Zhao, H.; Jiang, H. Study on SOC Prediction of Lithium Iron Phosphate Battery Based on Neural Network. J. Electron. Meas. Instrum. 2011, 25, 433–437. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Saad, M.H.; Ayob, A. Neural Network Approach for Estimating State of Charge of Lithium-Ion Battery Using Backtracking Search Algorithm. IEEE Access 2018, 6, 10069–10079. [Google Scholar] [CrossRef]
- Zahid, T.; Xu, K.; Li, W.; Li, C.; Li, H. State of charge estimation for electric vehicle power battery using advanced machine learning algorithm under diversified drive cycles. Energy 2018, 162, 871–882. [Google Scholar] [CrossRef]
- Cai, X.; Li, B.; Wang, H.; Nie, L. Study on SOC Estimation of Power Battery Based on Neural Network Model. Electrom. Eng. 2015, 32, 128–132. [Google Scholar]
- Xu, S.; Liu, Y.; Zhou, F. Research Progress of SOC Estimation of Lithium Ion Battery Based on RNN. Power Technol. 2021, 45, 263–269. [Google Scholar]
- Ming, T.; Zhao, J.; Wang, X.; Wang, K. SOC Estimation of Lithium Battery under High Pulse Rate Based on Improved LSTM. Power Syst. Prot. Control 2021, 49, 144–150. [Google Scholar]
- Xu, C.Y.; Shen, J.Z.; Du, X.; Zhang, F. An intrusion detection system using a deep neural network with gated recurrent units. IEEE Access 2018, 6, 48697–48707. [Google Scholar] [CrossRef]
- Zheng, Y.; Wen, H.; Han, F.; Yang, X.; Zhang, J. Study on SOC Estimation of Power Battery Based on LSTM Neural Network. Comput. Appl. Softw. 2020, 37, 78–81. [Google Scholar]
- Wu, H.; Fan, Y.; Huang, H.; Fang, L.; Liu, J.; Chen, W.; Li, Z. SOC Estimation Method of Lithium-ion Batteries Based on Relaxation Effect and GRU-RNN. In Proceedings of the 2022 IEEE 9th International Conference on Power Electronics Systems and Applications (PESA), Hong Kong, China, 20–22 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Han, Y. Wide Temperature SOC Estimation of Lithium Ion Battery Based on Gated Cyclic Unit Neural Network. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2021. [Google Scholar] [CrossRef]
- Zhu, Y.; He, W.; Li, J.; Li, Y.; Li, P. SOC Estimation of Lithium Battery Based on Bi LSTM/Bi GRU Cyclic Neural Network. Energy Storage Sci. Technol. 2021, 10, 1163–1176. [Google Scholar] [CrossRef]
- Xiao, B.; Liu, Y.; Xiao, B. Accurate State-of-Charge Estimation Approach for Lithium-Ion Batteries by Gated Recurrent Unit with Ensemble Optimizer. IEEE Access 2019, 7, 54192–54202. [Google Scholar] [CrossRef]
- Luo, X.; Zhang, B.; Huang, X.; Hou, C. Estimation of Lithium Battery SOC Based on SVM. Power Technol. 2016, 40, 287–290. [Google Scholar]
- Kecman, V. Support Vector Machines–An Introduction; Springer: Berlin/Heidelberg, Germany, 2005; pp. 1–47. [Google Scholar]
- Anton, J.C.A.; Nieto, P.J.G.; Viejo, C.B.; Vilan, J.A.V. Support Vector Machines Used to Estimate the Battery State of Charge. IEEE Trans. Power Electron. 2013, 28, 5919–5926. [Google Scholar] [CrossRef]
- Dang, X.; Yan, L.; Jiang, H.; Wu, X.; Zhang, X. Research on SOC estimation Method of Power Battery Based on Online LS-SVM. Power Technol. 2017, 41, 752–756. [Google Scholar]
- Pao, Y.; Feng, C.; Ren, X.; Zhang, J.; Ma, C.; Shao, W. On-line Transient Stability Fault Screening Based on Support Vector Machine. Power Syst. Autom. 2019, 43, 52–58. [Google Scholar]
- Song, X.; Yang, F.; Wang, D.; Tsui, K.L. Combined CNN-LSTM Network for State-of-Charge Estimation of Lithium-Ion Batteries. IEEE Access 2019, 7, 88894–88902. [Google Scholar] [CrossRef]
- Li, R.; Chen, Y. SOC Estimation of Power Lithium Ion Battery Based on AFFDRLS-AHIF. J. Beijing Jiaotong Univ. 2020, 44, 129–135. [Google Scholar]
- Zhang, S. A new method for lithium-ion battery’s SOH estimation and RUL prediction. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 2693–2697. [Google Scholar] [CrossRef]
- Saha, B.; Kai, G.; Christophersen, J. Comparison of prognostic algorithms for estimating remaining useful life of batteries. Trans. Inst. Meas. Control 2009, 31, 293–308. [Google Scholar] [CrossRef]
- Cai, Y.; Chen, W.; Su, Y.; Jiang, K.; Huang, H. Review of methods for predicting residual life of lithium ion batteries. Chin. J. Power Sources 2021, 45, 678–682. [Google Scholar]
- Zhang, C.; Zhao, S.; He, Y. An Integrated Method of the Future Capacity and RUL Prediction for Lithium-Ion Battery Pack. IEEE Trans. Veh.Technol. 2022, 71, 2601–2613. [Google Scholar] [CrossRef]
- Zhang, L.; Mu, Z.; Sun, C. Remaining Useful Life Prediction for Lithium-Ion Batteries Based on Exponential Model and Particle Filter. IEEE Access 2018, 6, 17729–17740. [Google Scholar] [CrossRef]
- Cheng, L.; Wan, Y.; Zhou, Y.; Gao, D.W. Operational Reliability Modeling and Assessment of Battery Energy Storage Based on Lithium-ion Battery Lifetime Degradation. J. Mod. Power Syst. Clean Energy 2022, 10, 1738–1749. [Google Scholar] [CrossRef]
- Xue, Y.; Zhou, H.; Luo, Y.; Lam, J. Battery Degradation Modelling and Prediction with Combination of Machine Learning and Semi-empirical Methods. In Proceedings of the 2022 12th International Conference on Power, Energy and Electrical Engineering (CPEEE), Shiga, Japan, 25–27 February 2022; pp. 78–85. [Google Scholar] [CrossRef]
- Rathore, K. An Empirical Capacity Degradation Modeling and Prognostics of Remaining Useful Life of Li-ion Battery using Unscented Kalman Filter. In Proceedings of the 2018 8th IEEE India International Conference on Power Electronics (IICPE), Jaipur, India, 13–15 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, Q.; Yu, X.; Wu, Q.; Xu, Y.; Chen, F.; Huang, R. Semi-empirical Degradation Model of Lithium-ion Battery with High Energy Density. Energy Storage Sci. Technol. 2022, 11, 2324–2331. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?doi=10.19799/j.cnki.2095-4239.2021.0725 (accessed on 17 March 2022). [CrossRef]
- Jônatas, M.; Pedro, T.J.; Carlos, A. Optimisation of an electric bus charging strategy considering a semi-empirical battery degradation model and weather conditions. In Proceedings of the 2022 11th International Conference on Control, Automation and Information Sciences (ICCAIS), Hanoi, Vietnam, 21–24 November 2022; pp. 298–303. [Google Scholar] [CrossRef]
- Li, K.; Zhou, P.; Lu, Y.; Han, X.; Li, X.; Zheng, Y. Battery life estimation based on cloud data for electric vehicles. J. Power Sources 2020, 468, 228192. [Google Scholar] [CrossRef]
- Chen, D.; Meng, J.; Huang, H.; Wu, J.; Liu, P.; Lu, J.; Liu, T. An empirical-data hybrid driven approach for remaining useful lifeprediction of lithium-ion batteries considering capacity diving. Energy 2022, 245, 123222. [Google Scholar] [CrossRef]
- Li, X.; Yuan, C.; Wang, Z. State of health estimation for Li-ion battery via partial incremental capacity analysis based on support vector regression. Energy 2020, 203, 117852. [Google Scholar] [CrossRef]
- Saurabh, S.; Darius, R.; Valentin, R.; Flynn, D.; Michael, P. Battery Stress Factor Ranking for Accelerated Degradation Test Planning Using Machine Learning. Energies 2021, 14, 723. [Google Scholar] [CrossRef]
- Dai, H.; Zhang, X.; Gu, W.; Wei, X.; Sun, Z. A Semi-Empirical Capacity Degradation Model of EV Li-Ion Batteries Based on Eyring Equation. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, L.; Pan, C.; Liu, L.; Cheng, Y.; Zhao, X. On-board state of health estimation of LiFePO4 battery pack through differential voltage analysis. Appl. Energy 2016, 168, 465–472. [Google Scholar] [CrossRef]
- Wang, J.; Liu, P.; Hicks-Garner, J.; Sherman, E.; Soukiazian, S.; Verbrugge, M.; Tataria, H.; Musser, J.; Finamore, P. Cycle-life model for graphite-LiFePO4 cells. J. Power Source 2011, 196, 3942–3948. [Google Scholar] [CrossRef]
- Preetpal, S.; Che, C.; Cher, T.; Shyh-Chin, H. Semi-Empirical Capacity Fading Model for SoH Estimation of Li-Ion Batteries. Appl. Sci. 2019, 9, 3012. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Lu, L.; Ouyang, M.; Xiao, Y. Modeling the capacity degradation of LiFePO4/graphite batteries based on stress coupling analysis. J. Power Source 2011, 196, 9757–9766. [Google Scholar] [CrossRef]
- Xu, B.; Oudalov, A.; Ulbig, A.; Andersson, G.; Kirschen, D.S. Modeling of lithium-ion battery degradation for cell life assessment. IEEE Trans. Smart Grid 2018, 9, 1131–1140. [Google Scholar] [CrossRef]
- Miao, Q.; Xie, L.; Cui, H.; Liang, W.; Pecht, M. Remaining useful life prediction of lithium-ion battery with unscented particle filter technique. Microelectron. Reliab. 2013, 53, 805–810. [Google Scholar] [CrossRef]
- Jiao, R.; Peng, K.; Dong, J. Remaining useful life prediction of Lithium-ion batteries based on conditional variational autoencodersparticle filter. IEEE Trans. Instrum. Meas. 2020, 69, 8831–8843. [Google Scholar] [CrossRef]
- Edge, J.S.; O’Kane, S.; Prosser, R.; Kirkaldy, N.D.; Patel, A.N.; Hales, A.; Ghosh, A.; Ai, W.; Chen, J.; Yang, J.; et al. Lithium ion battery degradation: What you need to know. Phys. Chem. Chem. Phys. 2021, 23, 8200–8221. [Google Scholar] [CrossRef] [PubMed]
- Chiodo, E.; De Falco, P.; Di Noia, L.P. Probabilistic Modeling of Li-Ion Battery Remaining Useful Life. IEEE Trans. Ind. Appl. 2022, 58, 5214–5226. [Google Scholar] [CrossRef]
- Wu, Y.; Li, W.; Wang, Y.; Zhang, K. Remaining Useful Life Prediction of Lithium-Ion Batteries Using Neural Network and Bat-Based Particle Filter. IEEE Access 2019, 7, 54843–54854. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, M. Lithium-ion batteries remaining useful life prediction based on a mixture of empirical mode decomposition and ARIMA model. Microelectron. Reliab. 2016, 65, 265–273. [Google Scholar] [CrossRef]
- Li, D.; Yang, L. Remaining useful life prediction of lithium battery using convolutional neural network with optimized parameters. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020; pp. 840–844. [Google Scholar] [CrossRef]
- Williard, N.; He, W.; Osterman, M.; Pecht, M. Comparative analysis of features for determining state of health in lithium-ion batteries. Int. J. Progn. Health Manag. 2013, 4, 1–7. [Google Scholar] [CrossRef]
- Ma, Q.; Wang, Y.; Yang, W.; Tao, B.; Zheng, Y. A Novel Health Index for Battery RUL Degradation Modeling and Prognostics. In Proceedings of the 2019 IEEE 8th Data Driven Control and Learning Systems Conference (DDCLS), Dali, China, 24–27 May 2019; pp. 1077–1081. [Google Scholar] [CrossRef]
- Jia, J.; Liang, J.; Shi, Y.; Wen, J.; Pang, X.; Zeng, J. SOH and RUL Prediction of Lithium-Ion Batteries Based on Gaussian Process Regression with Indirect Health Indicators. Energies 2020, 13, 375. [Google Scholar] [CrossRef] [Green Version]
- Ren, L.; Zhao, L.; Hong, S.; Zhao, S.; Wang, H.; Zhang, L. Remaining Useful Life Prediction for Lithium-Ion Battery: A Deep Learning Approach. IEEE Access 2018, 6, 50587–50598. [Google Scholar] [CrossRef]
- Goyal, H.; Kikuchi, A.; Ueda, S.; Honkura, K.; Kawaji, J. Novel Multiple Parameter Optimization for Improving Accuracy of Battery Ageing Model and Lifetime Prediction. In Proceedings of the IECON 2022–48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, L.; Chen, J.; Wang, H.; Wang, Y.; An, J.; Yang, R.; Pan, H. Remaining Useful Life Prediction of Battery Using a Novel Indicator and Framework With Fractional Grey Model and Unscented Particle Filter. IEEE Trans. Power Electron. 2020, 35, 5850–5859. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, J.; Liao, H.; Peng, Y.; Peng, X. A Health Indicator Extraction and Optimization Framework for Lithium-Ion Battery Degradation Modeling and Prognostics. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 915–928. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; He, H.; Pecht, M.G. Lithium-Ion Battery Remaining Useful Life Prediction With Box–Cox Transformation and Monte Carlo Simulation. IEEE Trans. Ind. Electron. 2019, 66, 1585–1597. [Google Scholar] [CrossRef]
- Huang, Z.; Zhou, X.; Gao, D.; Zhang, X.; Jiang, F.; Chen, B.; Yang, Y.; Wu, M.; Peng, J. A Novel Label-Free Supervision Learning Method for Lithium-ion Battery RUL Prediction. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 3150–3156. [Google Scholar] [CrossRef]
- Karmawijaya, M.I.; Haq, I.N.; Leksono, E.; Widyotriatmo, A. Development of Remaining Useful Life (RUL) Prediction of Lithium-ion Battery Using Genetic Algorithm-Deep Learning Neural Network (GADNN) Hybrid Model. In Proceedings of the 2022 7th International Conference on Electric Vehicular Technology (ICEVT), Bali, Indonesia, 14–16 September 2022; pp. 13–19. [Google Scholar] [CrossRef]
- Xu, J.; Zhen, A.; Cai, Z.; Wang, P.; Gao, K.; Jiang, D. State of Health Diagnosis and Remaining Useful Life Prediction of Lithium-Ion Batteries Based on Multi-Feature Data and Mechanism Fusion. IEEE Access 2021, 9, 85431–85441. [Google Scholar] [CrossRef]
- Zhu, J.; Tan, T.; Wu, L.; Yuan, H. RUL Prediction of Lithium-Ion Battery Based on Improved DGWO-ELM Method in a Random Discharge Rates Environment. IEEE Access 2019, 7, 125176–125187. [Google Scholar] [CrossRef]
- Jiantao, Q.; Feng, L.; Yuxiang, M.; Jiaming, F. A Neural-Network-based Method for RUL Prediction and SOH Monitoring of Lithium-Ion Battery. IEEE Access 2019, 7, 87178–87191. [Google Scholar] [CrossRef]
Figure 1.
The relationship between SOC, SOH and RUL.
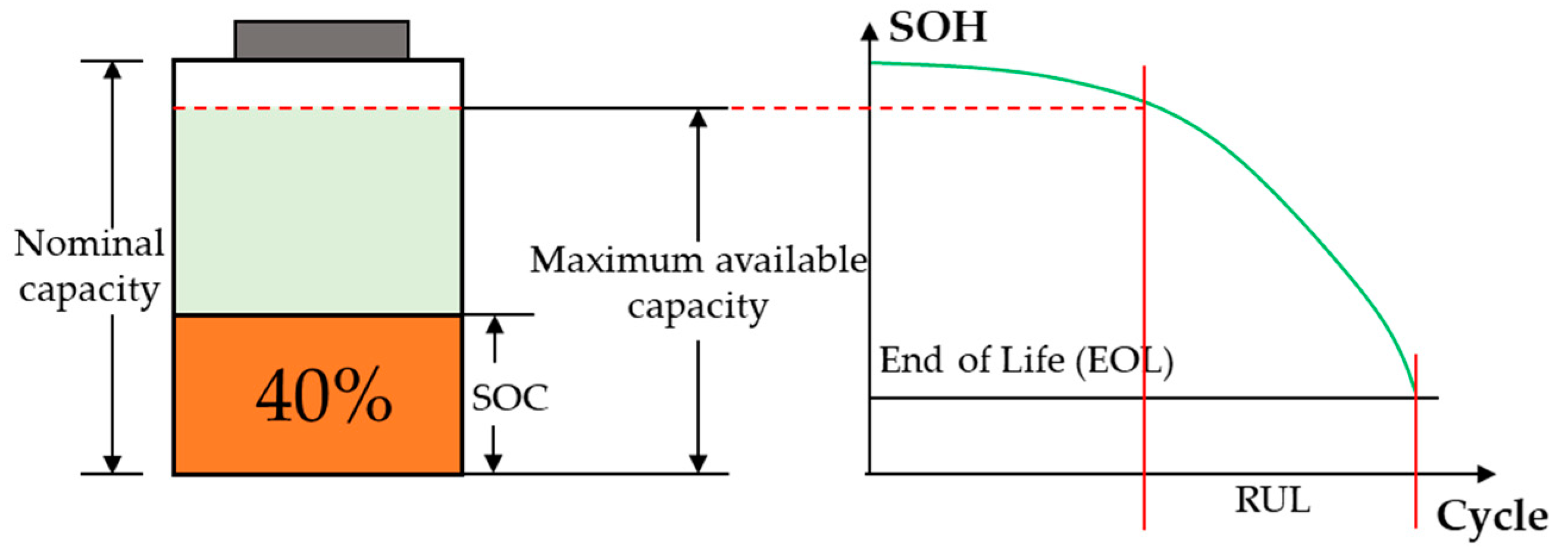
Figure 2.
Classification of lithium–ion battery SOC estimation methods.
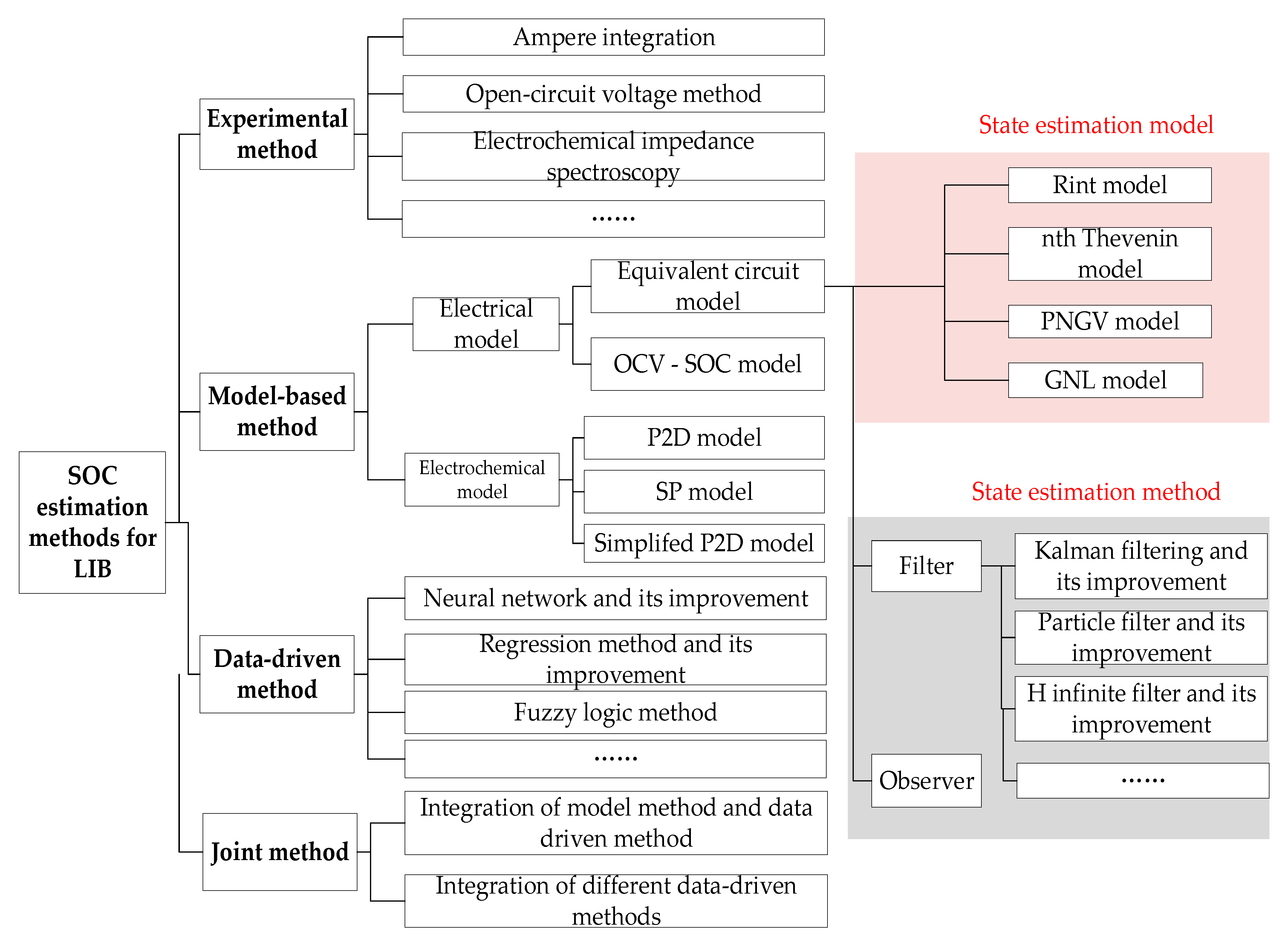
Figure 3.
OCV–SOC curve of lithium–ion battery.
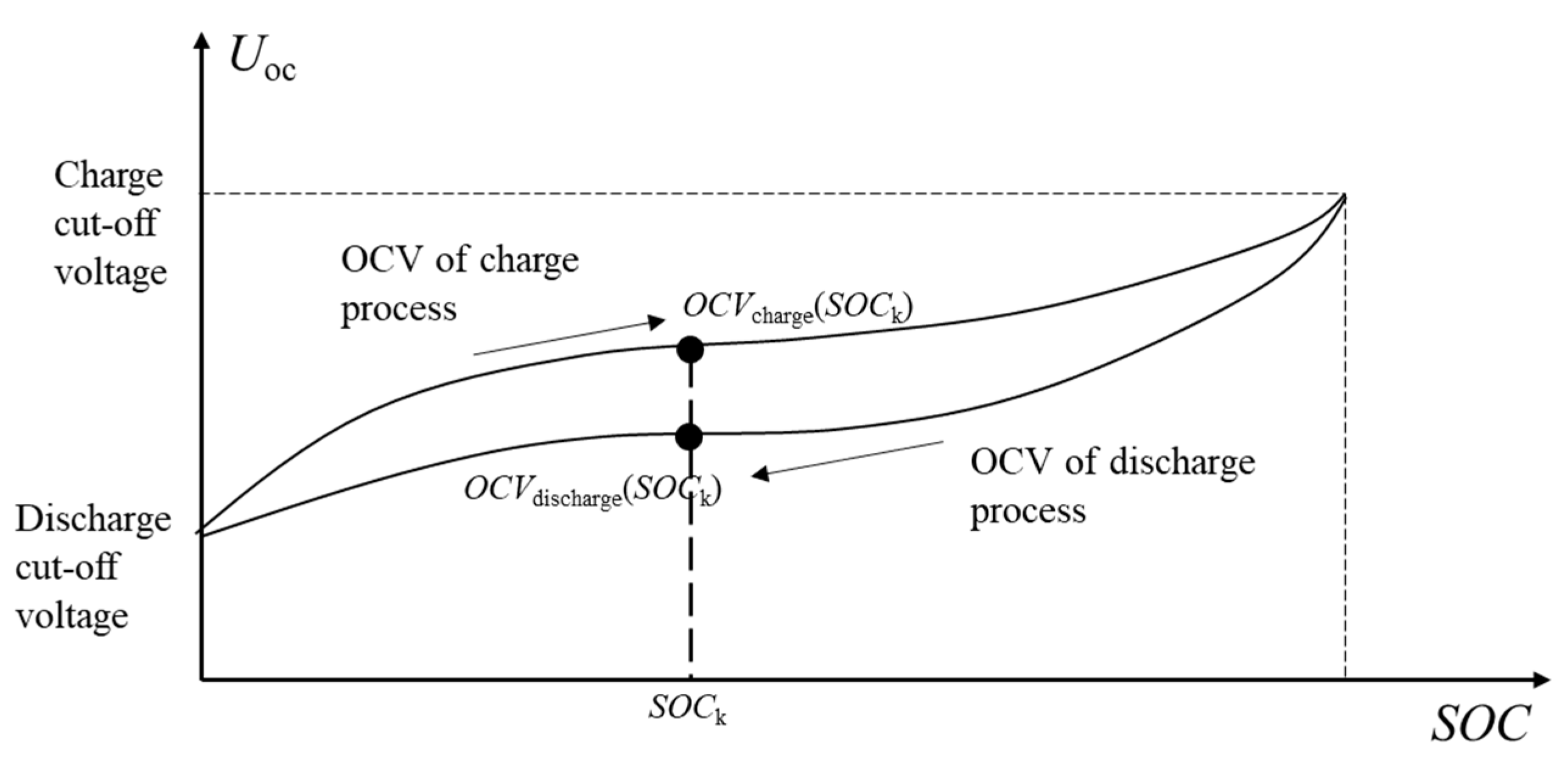
Figure 4.
Curve of terminal voltage SOC for LFP battery. Reprinted with permission from Ref. [19] (© 2020 by Zhihu).
Figure 4.
Curve of terminal voltage SOC for LFP battery. Reprinted with permission from Ref. [19] (© 2020 by Zhihu).
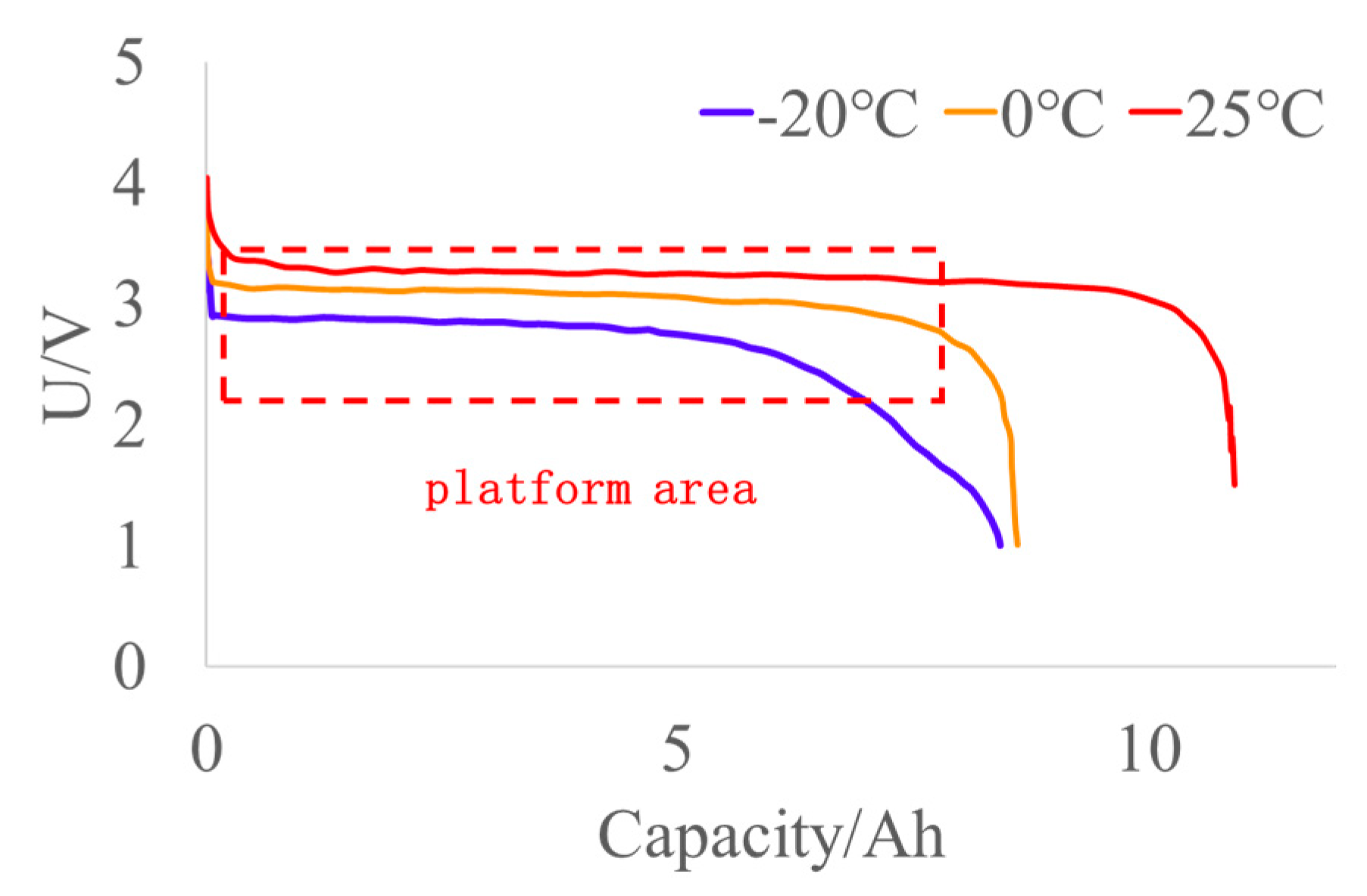
Figure 5.
First order of equivalent circuit for battery.

Figure 6.
The general architecture of the 3-layer neural network for SOC estimation. Reprinted with permission from Ref. [49] (© 2018 by Elsevier).
Figure 6.
The general architecture of the 3-layer neural network for SOC estimation. Reprinted with permission from Ref. [49] (© 2018 by Elsevier).
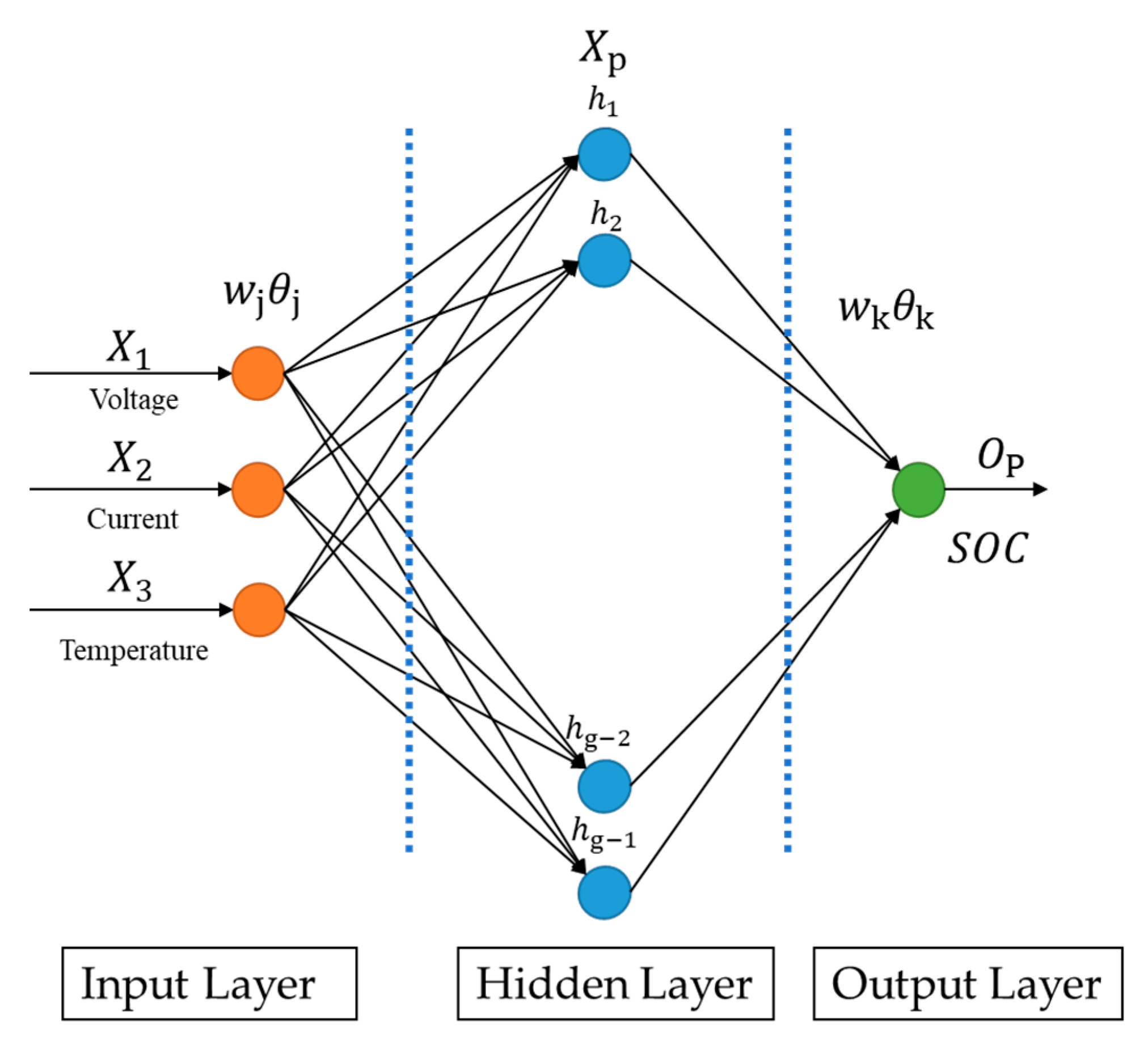
Figure 7.
Example of hyperplane to separate distinct classes for the SVM. Reprinted with permission from Ref. [60] (© 2005 by Springer).
Figure 7.
Example of hyperplane to separate distinct classes for the SVM. Reprinted with permission from Ref. [60] (© 2005 by Springer).

Figure 8.
Classification of RUL prediction methods for a lithium–ion battery.
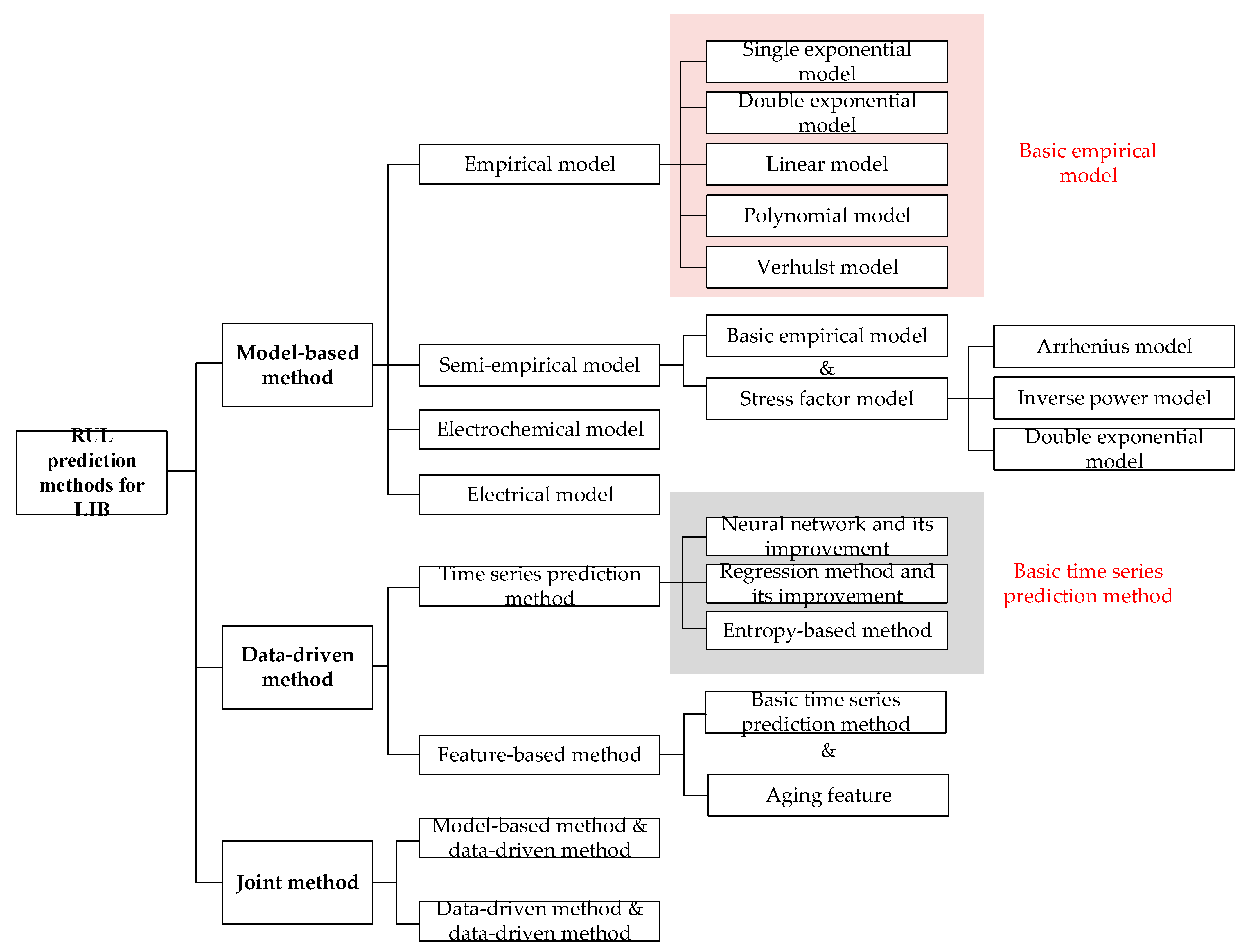
Figure 9.
Procedure for feature-based data-driven method.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Classification and comparison of models for a lithium–ion battery.
| Classification | Configuration | Description | Advantage | Disadvantage | |
|---|---|---|---|---|---|
| Electrical model | Rint model | 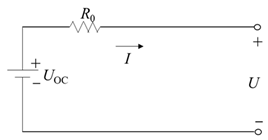 | An ideal voltage source is connected to a resistor in series. | The model is simple, and the parameter measurement is easy. | It cannot reflect the dynamic characteristics of the battery and has low accuracy with a small range of applications. |
| Thevenin model | 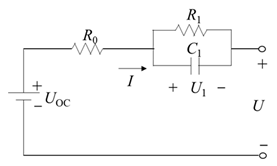 | The n-order Thevenin equivalent circuit model is based on the Rint model; n RC circuits are connected in series to represent the polarization phenomenon of the cell. | The RC loop is used to simulate the dynamic characteristics of batteries, and the higher the n, the higher the precision | The change in open-circuit voltage and the self-discharge caused by load current accumulated over time are not considered. The bigger the n, the more computation. | |
| PNGV model | 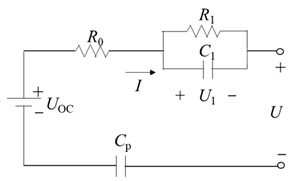 | Based on the 1st order Thevenin equivalent circuit model, capacitor Cp is added to describe the change in open-circuit voltage caused by load current over time. | The calculation burden is low; Compared with the 1st order Thevenin equivalent circuit model, the accuracy is higher. | It does not solve the battery self-discharge problem. | |
| GNL model | 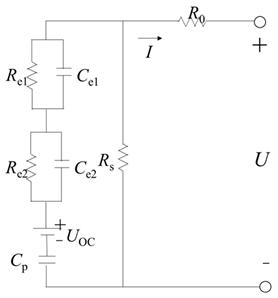 | The two RC loops represent concentration polarization and electrochemical polarization, respectively, and the structure is closer to the internal characteristics of the cell. | Compared with PNGV, the open circuit voltage change caused by load current over time is considered, and the battery self-discharge is considered; higher precision and wider applicability. | Compared with the PNGV model, the calculation is more complex with larger calculation burden. | |
| Open-circuit voltage SOC model | The battery terminal voltage is calculated with the relationship between OCV and SOC. | Simple calculation | Some parameters of the model do not have actual physical significance, and the accuracy is low. | ||
| Electrochemical model | P2D model | 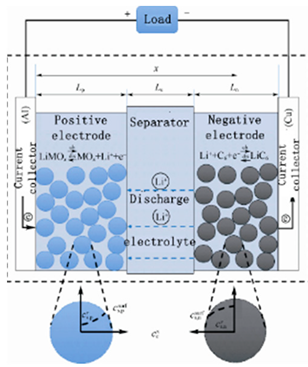 | The lithium–ion battery is equivalent to the structure of electrode (positive and negative electrode); diaphragm and electrolyte are composed of numerous spherical solid particles. | High accuracy and wide applicability | It is too complex and computationally intensive, and the analytical solution can be is difficult to obtain. |
| SP model |  | Two spherical particles are used to represent the positive and negative terminals of lithium ion batteries, respectively. | Simple structure and small amount of calculation | Under the condition of high rate charge and discharge, the assumption of the model is not valid, the calculation error is large and the application range is small. | |
| Simplify the P2D model | The PDE of the P2D model is simplified. | The calculation burden of the P2D model is greatly reduced. It is more accurate and applicable than the SP model. | Unable to solve the inherent problems of the P2D, it is difficult to apply online. | ||
Table 2.
Comparison of advantages and disadvantages in common SOC estimation methods for lithium–ion batteries.
Table 2.
Comparison of advantages and disadvantages in common SOC estimation methods for lithium–ion batteries.
| Classification | Method | Advantage | Disadvantage | |
|---|---|---|---|---|
| Experimental method | Ampere integration | Non-relative internal mechanism of the battery; simple | Easy to generate cumulative error, which requires high initial value and sensor precision | |
| OCV–SOC method | Non-relative to battery types; simple | The SOC cannot be calculated online in real time [5] | ||
| Model-based method | Basic model | Electrical model | Simple and practical | Poor accuracy |
| Electrochemical model | It reflects the internal characteristics of the battery | Complex and computationally intensive [5] | ||
| State estimation method | KF method | The convergence speed is fast, and the noise suppression ability is strong. Low sensitivity to initial value | The system noise is uncertain, which requires high accuracy of the model | |
| PF method | Strong robustness and low requirement for model accuracy | Prone to particle degradation Computationally intensive | ||
| Data-driven method | Neural network | No reliance on high-precision battery models | Easy to disappear gradient and fall into local optimization Computationally intensive Easy to overfit, poor generalization capability | |
| Regression analysis | It can achieve good results in high-dimensional pattern recognition, nonlinear regression and other problems | Only applicable to small data samples | ||
| Joint method | Model-based method and data-driven method | The accuracy and reliability of the estimation results are high | High complexity and computationally intensive [2] | |
| Data-driven method and data-driven method | ||||
Table 3.
Commonly used health factors of lithium–ion battery.
| Classification | Health Factors |
|---|---|
| Voltage curve relavant | Constant voltage charging time [93], voltage increment in the same time interval [94], time consumed for certain voltage increments [95], dQ/dV [97], dV/dQ [97], maximum slope of voltage curve [95] |
| Current curve relavant | Constant current charging time [93], current increment in the same time interval [94], time consumed for certain current increments [96], area under current curve [95] |
| Temperature | Temperature increment in the same time interval [94], time consumed for certain temperature increments [95] |
| Other | Wavelet packet energy entropy [98] |
Table 4.
Comparison of lithium–ion battery RUL prediction methods.
| Classification | Method | Advantage | Disadvantage |
|---|---|---|---|
| Model-based method | Empirical model | Low calculation burden [3] | Poor accuracy; not be able to consider influence of working conditions and the environment [2] |
| Semi-empirical model | Able to consider influence of working conditions and environment | Low accuracy; low robustness under dramatic working condition changes [1] | |
| Electrochemical model | Able to reveal the aging mechanism | Large calculation amounts due to too many parameters [3] | |
| Data-driven method | Time series prediction method | Does not require complex mathematical models | Large calculation amounts; overfitting; unable to reveal local RUL variation and highly dependent on training set and data quality |
| Feature-based method | Related to battery characteristics [4] Good accuracy for local RUL variation | Heavy calculation burden [2] | |
| Joint method | Model-based method and data-driven method | Relatively high reliability and accuracy [4] | Heavy calculation burden; high complexity [2] |
| Data-driven method and data-driven method |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhao, J.; Zhu, Y.; Zhang, B.; Liu, M.; Wang, J.; Liu, C.; Hao, X. Review of State Estimation and Remaining Useful Life Prediction Methods for Lithium–Ion Batteries. Sustainability 2023, 15, 5014. https://doi.org/10.3390/su15065014
AMA Style
Zhao J, Zhu Y, Zhang B, Liu M, Wang J, Liu C, Hao X. Review of State Estimation and Remaining Useful Life Prediction Methods for Lithium–Ion Batteries. Sustainability. 2023; 15(6):5014. https://doi.org/10.3390/su15065014
Chicago/Turabian StyleZhao, Jiahui, Yong Zhu, Bin Zhang, Mingyi Liu, Jianxing Wang, Chenghao Liu, and Xiaowei Hao. 2023. "Review of State Estimation and Remaining Useful Life Prediction Methods for Lithium–Ion Batteries" Sustainability 15, no. 6: 5014. https://doi.org/10.3390/su15065014
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.