1. Introduction
Sago palm is a highly valuable plant but is not well known. This palm is one of the most promising underutilized food crops in the world, but has received very little attention or study [
1]. The primary product of this palm is sago starch; the sponge inside the trunk contains this starch at yields of 150 to 400 kg dry starch per harvested trunk [
2]. Researchers interested in reviewing sago palm starch and the promising aspects of sago palm should refer to Karim et al. [
3] and McClatchey et al. [
4]. According to Abbas [
5], Indonesia has the largest area of sago palm forest and cultivation worldwide, as confirmed by Bintoro [
6], who stated that 85% of all sago (5.5 million ha) is distributed in Indonesia. Flach [
2] roughly estimated that wild stands and (semi)-cultivated stands with good sago palm coverage occupy 2.49 million ha worldwide. In short, various reports provide different growing areas and percent coverage estimates.
Remote sensing-based research to measure and map sago palm areas is scant, and little is known about the optimal sensor type, method, or growth formation. Previous research on sago palm mapping has mostly utilized medium-resolution satellite imagery. For example, Santillan et al. [
7] used Landsat ETM+. Meanwhile, Santillan et al. [
8] added the multi-source datasets ALOS AVNIR-2, Envisat ASAR, and ASTER GDEM to map the starch-rich sago palm in Agusan del Sur, Mindanao, The Philippines. The WorldView-2 sensor was used for visual interpretation and confirmation of sago palm [
9]. A comprehensive in situ spectral response measurement of sago palm was carried out to discriminate them from other palm species in several municipalities of Mindanao [
10]. dos Santos et al. [
11] performed automatic detection of the large circular crown of the palm tree
Attalea speciosa (babassu) to estimate its density using the “Compt-palm” algorithm, but the use of this algorithm has not been reported for the detection of sago palms in clump formations.
Mapping sago palms using remote sensing techniques requires the recognition of the presence of these trees on satellite imagery. According to the review on tree species classification of Fassnacht et al. [
12] using remote sensing imagery, most tree species classification is object-based. Object-based image analysis (OBIA) is most often applied for tree species classification. For example, one study determined the age of oil palm plantations using WorldView-2 satellite imagery in Ejisu-Juaben district, Ghana, to create a hierarchical classification using OBIA techniques [
13]. Puissant et al. [
14] mapped urban trees using a random forest (RF) classifier within an object-oriented approach. Wang et al. [
15] evaluated pixel- and object-based analyses in mapping an artificial mangrove from Pleiades-1 imagery; here, the object-based method had a better overall accuracy (OA) than the pixel-based method, on average. The development of the (Geographic) OBIA approach in remote sensing and geographic information science has progressed rapidly [
16]. OBIA is applied in image segmentation to subdivide entire images at the pixel level into smaller image objects [
17], usually in the form of vector-polygons. OBIA techniques may involve other features in addition to the original spectral bands, such as arithmetical, geometrical, and textural features of the image object. A popular arithmetic feature is the normalized difference vegetation index (NDVI) used in vegetation and non-vegetation classifications [
18]. Image classification using OBIA that incorporates spectral information, and textural and hierarchical features [
18] can overcome the shortcomings of pixel-based image analyses (PBIAs).
In the OBIA environment, the geometric features of the object can be determined from the segmented image. For example, Ma et al. [
19] utilized 10 geometric features for land cover mapping, i.e., area, compactness, density, roundness, main direction, rectangular fit, elliptic fit, asymmetry, border index, and shape index. A brief description of these geometrical features can be found in Trimble
® Trimble eCognition [
17]. The textural feature is an important component in imagery, as it is used to evaluate the image objects, and can be based on layer values or the shapes of the objects. The textural feature based on layer values or color brightness plays an important role in image classification. Several methods of textural information extraction are available. Among these, statistical methods are easy to implement and have a strong adaptability and robustness [
20]. For example, the gray level co-occurrence matrix (GLCM) [
21] is often used as a textural feature in the OBIA classification approach, and has been applied extensively in many studies involving textural description [
20]. Zylshal et al. [
22] used GLCM homogeneity to extract urban green space, and Ghosh and Joshi [
23] proved that the GLCM mean was more useful than their proposed textural features for mapping bamboo patches using WorldView-2 imagery. Franklin et al. [
24] incorporated GLCM homogeneity and entropy to determine forest species composition, and Peña-Barragán et al. [
18] applied GLCM dissimilarity and GLCM entropy features to discriminate between crop fields.
One of the major machine learning strategies is the supervised learning scenario, which trains a system to work with samples that have never been used before [
25]. Numerous sophisticated machine learning algorithms are widely applied in remote sensing for image classification; within the OBIA environment, the support vector machine (SVM) classifier [
26,
27,
28], RF [
29], classification and regression tree (CART) [
18], and k-nearest neighbor (KNN) [
30] are commonly used. In this study, we used the SVM algorithm as a classifier. Ghosh and Joshi [
23] performed a comparative analysis of SVM, RF, and the maximum likelihood classifier (MLC), and found that SVM classifiers outperform RF and MLC for mapping bamboo patches. Mountrakis et al. [
28] provided a comprehensive review regarding SVM classifier use; they justified that many past applications of SVM classifiers were superior in performance to alternative algorithms (such as backpropagation neural networks, MLC, and decision trees). The same justification was identified by Tzotsos [
31], who compared SVM and nearest neighbor (NN) classifiers and found that the SVM classifier provides satisfactory classification results. Other sophisticated image classification methods include normal Bayes (NB), CART, and KNN. Qian et al. [
32] compared several machine learning classifiers for object-based land cover classification using very high-resolution imagery; they found that both SVM and NB were superior to CART and KNN, having a high classification accuracy of >90%.
When working with high-dimensional data, involving other features in addition to the original spectral bands, may result in redundancy in image classification and human subjectivity. Also, processing a large number of features requires a significant computation time and resources. To overcome these shortcomings, feature selection techniques should be applied, as commonly used in machine learning and data mining research. Tang et al. [
33] have provided a comprehensive review of feature selection for classification. In the environment of machine learning, Cai et al. [
34] surveyed several representative methods of feature selection; their experimental analysis showed that the wrapper feature selection method can obtain a markedly better classification accuracy. For supervised feature selection, recursive feature elimination (RFE), a wrapper method of SVM classification, is widely studied and applied to measure feature performance and develop sophisticated classifiers [
34]. Ma et al. [
19] demonstrated the added benefits of using the SVM-RFE classifier, with respect to classification accuracy, especially for small training sizes.
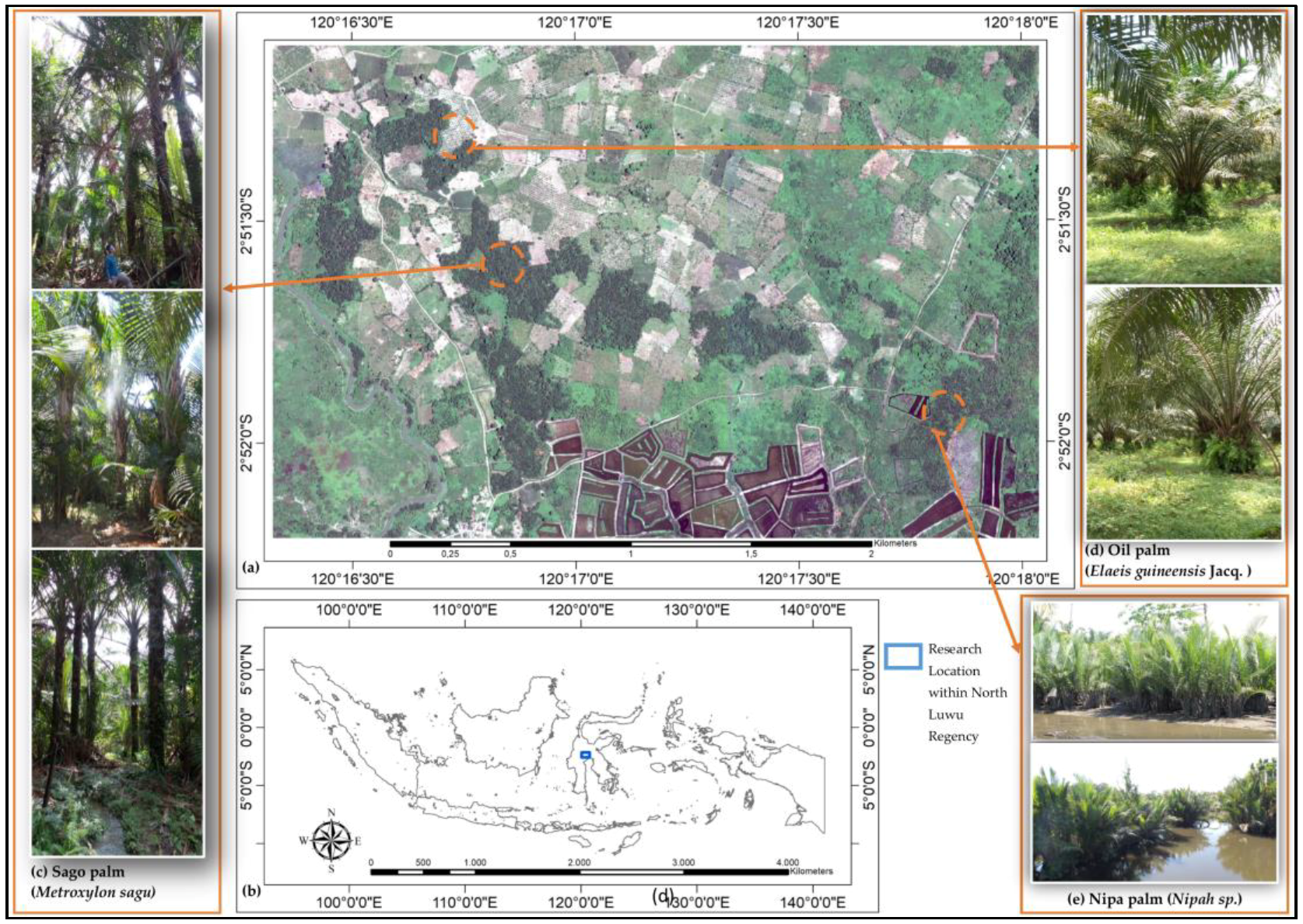
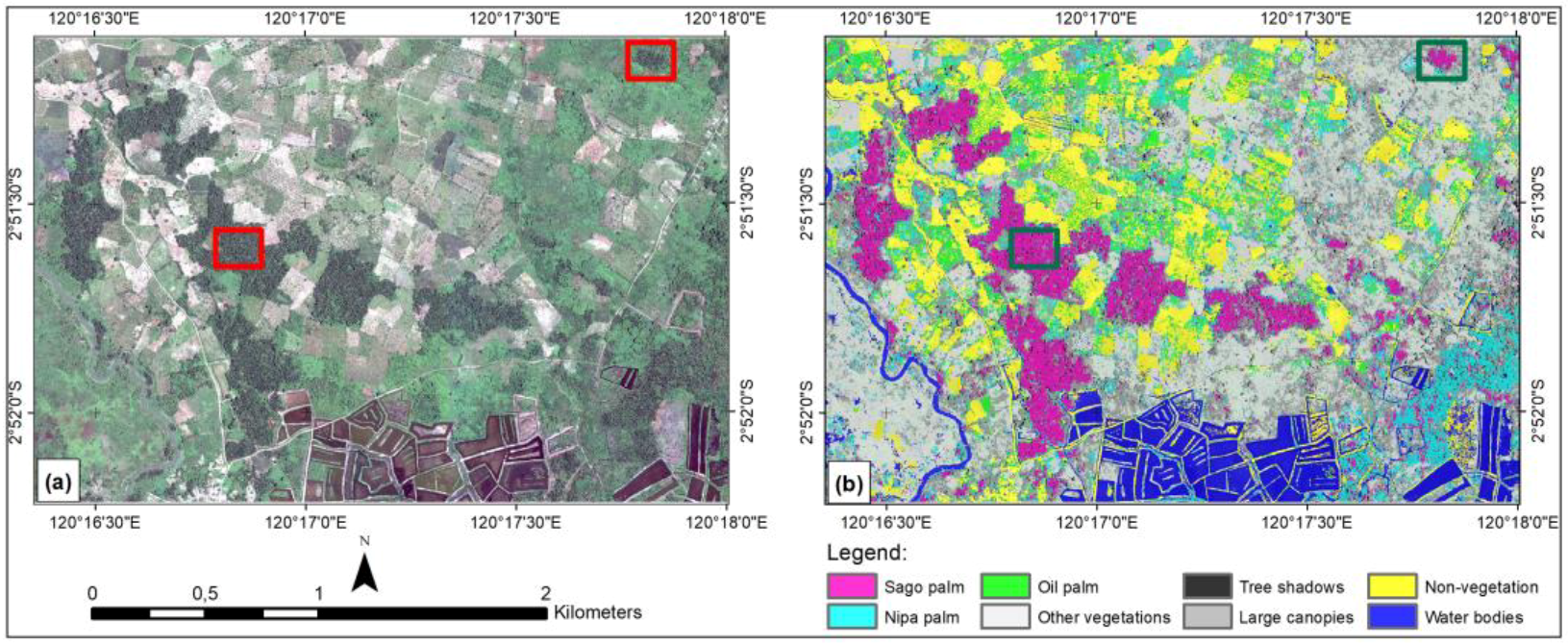
In this study, we used Pleiades-1A imagery of an area around Luwu Raya, which has extensive sago palm coverage (
Figure 1). Based on ground truth data and interviews with smallholder farmers, most sago palm trees in Luwu Raya occur in natural or semi-cultivated stands, scattered either in large or small clumps, and with irregular spatial patterns in terms of size, age, and height. Therefore, recognizing sago palm from satellite imagery is very challenging.
According to the context and constraints provided in the studies referenced above, this research was based on the following hypotheses. (i) Image objects of sago palms have specific arithmetic, geometric, and textural features. Through the OBIA approach, RFE and the SVM classifier can reveal the optimum features for sago palm classification. (ii) The mapping of sago palm trees using high-resolution satellite imagery can achieve a high classification accuracy within the OBIA framework, enriched by arithmetic, geometric, and textural features. In support of these hypotheses, this research sought to reveal the important spectral, arithmetic, geometric, and textural features through RFE feature selection and to measure the accuracy of the SVM classifier and analyze the overall classification performance.
The remainder of this paper is organized as follows.
Section 2 explains the materials and methods, and
Section 3 provides the results.
Section 4 discusses the findings in the context of previous research. The final section presents conclusions and suggests future work related to this research.
4. Discussion
Previous research on sago palm mapping, as described in the Introduction section, has employed the MLC as the classifier to stack and analyze multi-source datasets. Our research applied the SVM as a learning algorithm, which is a promising machine learning methodology [
28] that has recently been used for a wide range of applications in remote sensing. We utilized high-resolution full-band satellite imagery from Pleiades-1A. The red band is the most important, exhibiting the strongest absorption in the majority of tree species due to the presence of chlorophyll, used for photosynthesis [
23]. The dominant chlorophyll pigments account for almost all absorption in the red and blue bands, and carotenoid pigments extend this absorption into the blue-green bands [
64]. Meanwhile, reflectance of the NIR band at the leaf level is controlled by water content, due to chemically driven absorption [
12], because most chlorophyll pigments do not significantly absorb infrared light [
64]. When the amount of water increases, the transmittance of the NIR band will be enhanced [
23], particularly at wavelengths longer than about 1100 nm, which water strongly absorbs [
64]. In this context, the importance of selecting particular spectral features for certain vegetation classes is evident, because the spectral response depends on their chemical and structural characteristics [
64]. According to in situ spectral measurements [
10], from 870 nm upward, oil palm is separable from nipa palm and sago palm, and evidence shows that sago palm is separable from nipa palm around 935–1010 nm. Unfortunately, the Pleiades-1A does not have a spectral band at 935–1010 nm; therefore, we added other features to improve the classification accuracy, including arithmetical, geometrical, and textural features.
This research site contained several vegetation classes; accordingly, we added the vegetation index NDVI, which is useful for distinguishing among green vegetation classes [
18] and also between vegetation and non-vegetation. Other important arithmetic features, MD [
19] and VB, were considered due to their high contrast between sago palm and nipa palm. Visual assessment of a natural-color composite of Pleiades-1A imagery found textural differences between sago palm and nipa palm in clumps; thus, the inclusion of textural features was expected to make a strong contribution to the classification accuracy. The 12 textural features used by Haralick [
21] were selected as input candidates [
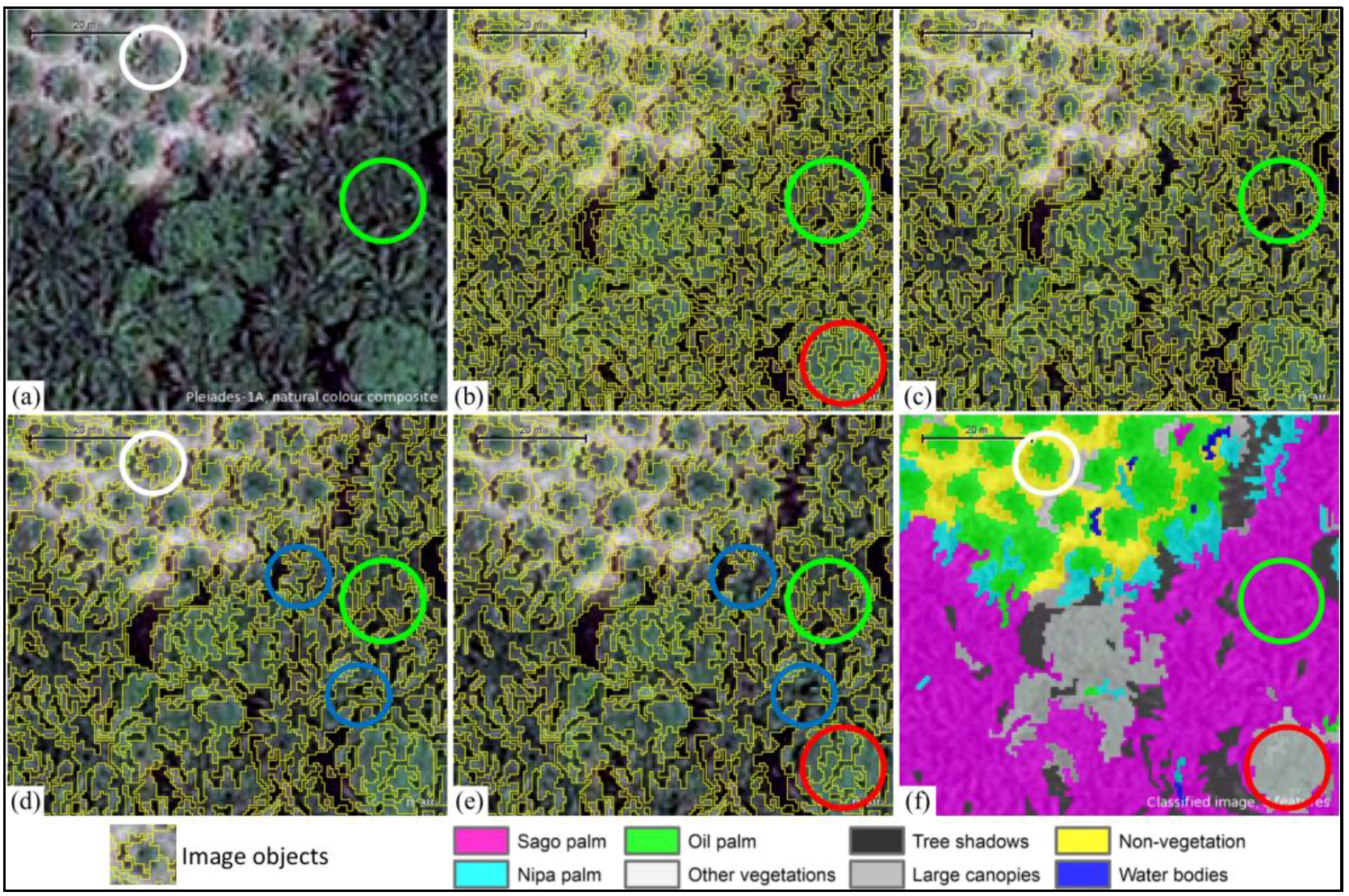
19]. Object-based image analyses require a segmented image as an input for classification, with every class represented by many image objects depending on the scale, shape, and compactness parameters used during the segmentation process. Every image object has certain geometric characteristics; hence, we included the seven geometric features listed in
Table 2, of which five were used by Ma et al. [
19].
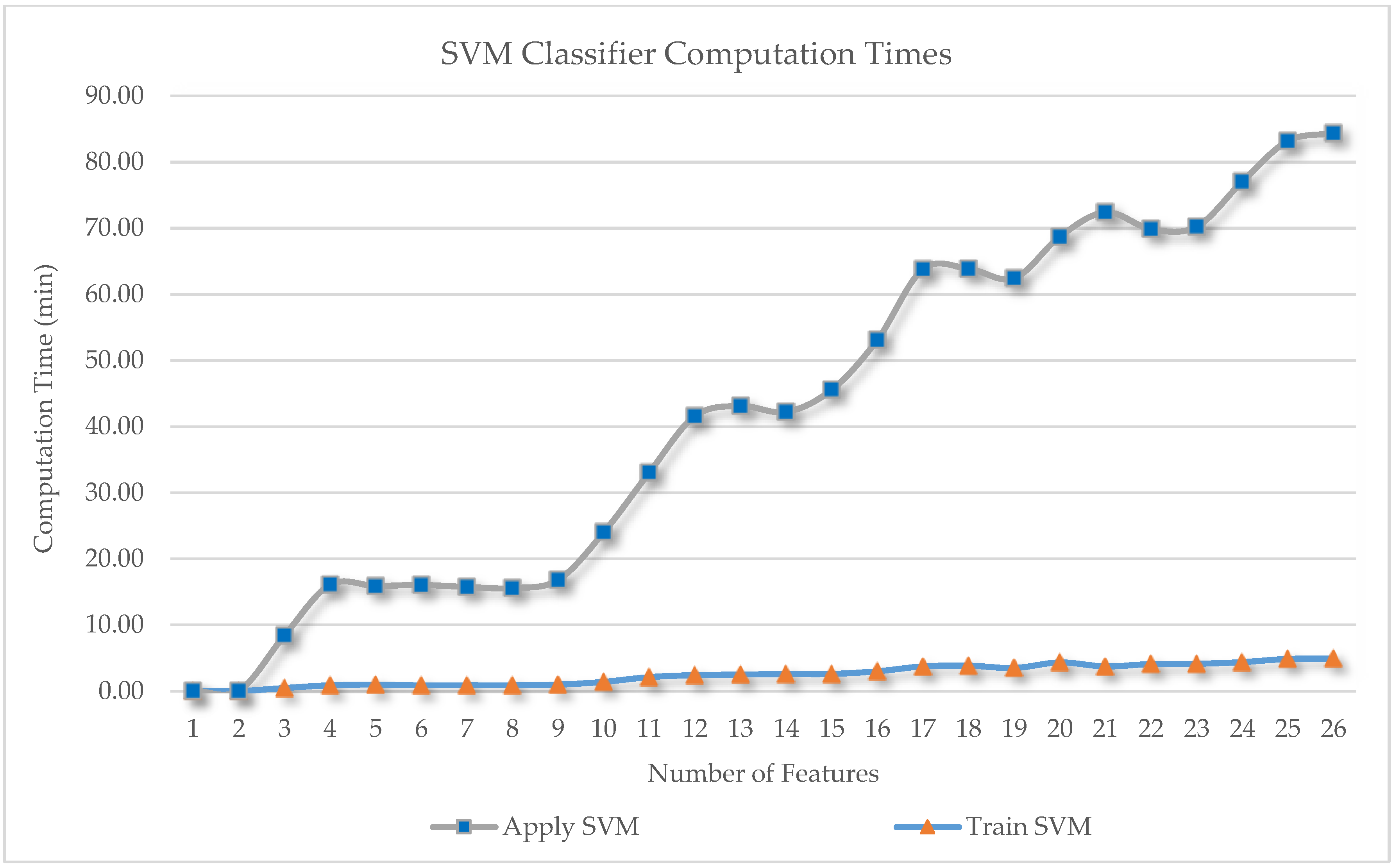
Involving more feature space in the classification scheme has great potential for improving the accuracy, but our data dimensionality became very high. We can estimate computational complexity by multiplying the 26 features by eight classes, with 360 samples for each class and 161,168 image objects at the final segmentation level; therefore, we applied feature selection to reduce data dimensionality and computational complexity. Based on our computer performance (processor: Intel (R) Core (TM) i7-3770 CPU @ 3.40 GHz (eight CPUs); memory: 32,768 MB RAM), we recorded the computation time for these 26 classification schemes. From the results displayed in
Figure 8, the amount of computation time required increased in an almost linear manner as a function of the number of features involved in the classification. The computation time of the training SVM classifier (the orange triangle in
Figure 8) is always shorter than that when applying an SVM classifier (the blue square in
Figure 8), because it is only applied to the sample. The difference in time required between one feature and 26 features was significant, at ~80 min, considering that our test image size was relatively small (195 MB). At the highest OA, with eight features, the computation time was ~15 min, which is very fast compared with that required for 26 features. If the test image size increased to the gigabyte range, we would expect the computation time to be considerable. Therefore, if the research project covers a wide area and uses very high-resolution satellite imagery, performing feature selection prior to classification is recommended. Our research goal was to obtain the highest possible classification accuracy; thus, we used a feature-important evaluation method [
19], i.e., SVM-RFE, with our SVM learning method. According to experimental analyses by Cai et al. [
34], SVM-RFE provides the best accuracy, of nearly 100%, outperforming other feature-selection methods. We executed SVM-RFE with known sample classes and obtained the 10 most important features, with a CCI of 85.55%. This predicted classification accuracy is still considered high due to the presence of other similar tree species in the study area, i.e., nipa palm and oil palm.
Our sample mining showed that three visible spectral bands remained important (blue, green, and red bands); thus, the NIR band was eliminated and replaced with the three arithmetic features (NDVI, MD, and VB). One geometric feature, the degree of skeleton branching, was also included among the 10 most important features, because image objects of the sago palm class appear to have a high degree of skeleton branching. Within the 10 most important features, textural features play an important role, as do spectral features, i.e., GLDV contrast, GLCM correlation, and GLCM angular second moment, which contributed about 30% to the model. For crop identification, Peña-Barragán et al. [
18] found that the textural features discussed by Haralick [
21] contributed 6–14% to the OBIA approach with a decision tree algorithm. The difference in the contribution of textural features could be due to the use of different algorithms and target classes. Ghosh and Joshi [
23] noted that GLCM mean is more useful than other GLCM textural features for mapping bamboo patches in the lower Gangetic plains of the state of West Bengal, India, using WorldView-2 imagery. Based on the discussion above, we can presume that the role and type of textural features depend on the classifier algorithm, feature selection method, target class, image sensor, and image scene.
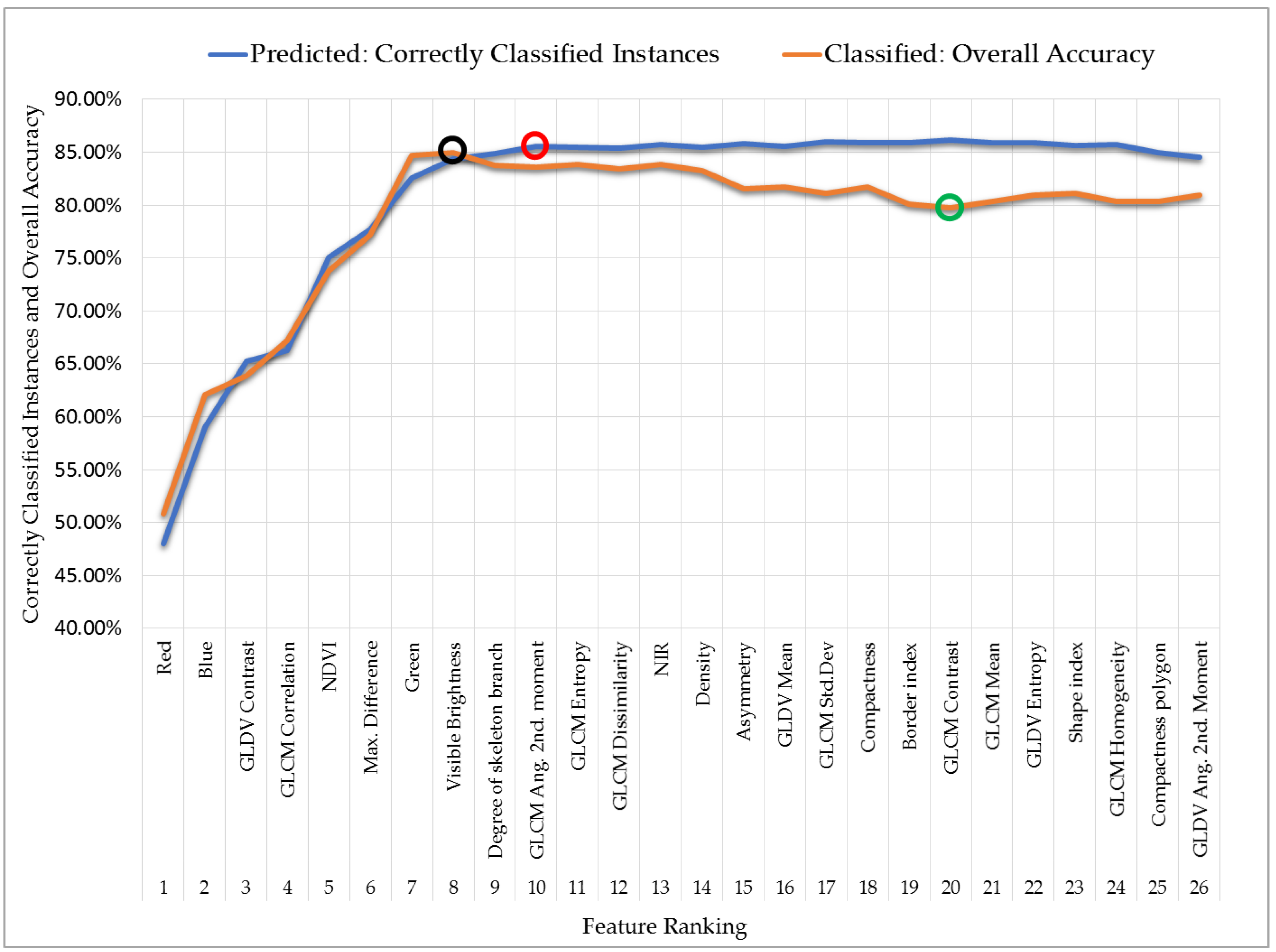
When the ranked features were applied to the test image, the results showed normal fitting for the eight most important features, achieving the highest OA of 85.00% (with a PA and UA for sago palm of 88.00% and 81.48%, respectively); thereafter, the data appeared to be overfitted (brown line in
Figure 3). The degree of skeleton branching and the GLCM angular second moment contribute less to the model; when these two features (the 9th and 10th most important features) were involved in the classification, the model was overfitted. Meanwhile, the textural features of the GLCM correlation and GLDV contrast remained important, improving the OA from 62% to 67% (for details, see
Figure 3). According to the sample scatter plot, most GLDV contrast values of the nipa palm class were higher than those of the sago palm class; thus, these values are useful to distinguish these classes. In a harsh critique of thematic map accuracy derived from remote sensing [
65], an OA of 85% was still considered acceptable; researchers interested in the historical origin of this value should access the original study [
66]. Additionally, Foody et al. [
65] and Congalton et al. [
67] provide in-depth discussions of image classification accuracy assessment.
Regarding the accuracy of our classified image, the highest OA of 85% may still be improved by applying random sampling, as described in several studies [
67,
68] and recommended by Ma et al. [
69]. Even though we used another set of checkpoints independent of the training points, some subjectivity may have been introduced into the OA due to the manual selection approach. In our opinion, an OA of 85% is still relatively high compared with other research findings on palm-tree classification. Previous studies on sago palm mapping have mostly utilized medium-resolution satellite imagery, such as Santillan [
8] and Santillan et al. [
7]. When they only used spectral information from ALOS AVNIR 2 or LANDSAT ET+, the UA and PA of sago palm classification reached 77% and 82%, respectively; in contrast, a UA of sago palm classification achieved 91.37% when several medium-resolution satellite images were combined. Other palm-tree classifications, such as coconut tree [
70] and babassu palm (
Attalea speciosa) [
11], also resulted in a lower classification accuracy, that is, an OA value of 76.67% for coconut tree and 75.45% for babassu palm. Li et al. [
71] achieved better classification results when performing oil palm plantation mappings in Cameroon using PALSAR 50 m; OA ranging from 86% to 92% was accomplished using an SVM classifier. To evaluate the significance of OA values obtained from our own research, we conducted a McNemar statistical test.
McNemar tests indicated that using seven to 14 of the most important features was optimal. Research is most effective when using as few features as possible while still obtaining a high accuracy. Generally, the optimal number of important features is small. For example, Cai et al. [
34] used 10 and 15 features with SVM-RFE to achieve nearly 100% accuracy. Ma et al. [
19] reported using 10–20 features for the SVM classifier. Our method requires seven to 14 features for sago palm classification; the results are comparable to those of previous studies within an OBIA framework with an SVM classifier. Differences in the optimum numbers of features should be considered in image classification depending on the heterogeneity of test images. The development of other important features to obtain a classification accuracy higher than 85% in sago palm classification remains very challenging.
5. Conclusions
Sago palm classification using the OBIA approach and SVM classifier should consider other features in addition to the original spectral bands from satellite imagery. The OA of four-band classification can only reach 83%; the addition of textural, arithmetical, and geometrical features increases the OA to 85%. The PA of sago palm was also lower than that including other features (80% vs. 88%, respectively). Including the additional features in the classification increases the amount of data to be processed; thus, the computation time and resources required increase as well. As such, the feature selection algorithm is highly recommended.
This study reconfirms the importance of feature selection prior to the classification process. Our major finding is the revelation of the most important features for sago palm classification within an OBIA framework. We used SVM-RFE to assess the importance of the role of each feature, generating a ranking of features. The SVM classifier learned from the training samples and, when applied to the test image, produced normal fitting based on up to eight of the most important features, which resulted in the highest OA of 85.00%. For sago palm classification, it is important to include textural and arithmetic features such as GLDV contrast, GLCM correlation, NDVI, MD, and VB, in addition to spectral information. In this study, the McNemar test was used to evaluate associations among OA values of classification schemes, and the optimum range of ranked features was identified.
Generally speaking, the palm-tree classification is very challenging, especially for sago palm classification in our study area. The sago palm trees in Luwu Raya are are generally natural or semi-cultivated, and tend to be scattered either in large or small clumps with irregular spatial patterns in size, age, and height. Coupled with the presence of other similar palm-tree species that have similar spectral responses and textures, such as nipa palm and oil palm, this complicates the identification process. Thus, a specific sago palm classification scheme is required to better understand its spatial and spectral characteristics. The OA value of 85% can certainly be improved through further revisions of our sampling approach for accuracy assessment, measurement of segmentation accuracy, atmospheric correction, and geometric correction when using multi-strip images.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







