The Performance Analysis of INS/GNSS/V-SLAM Integration Scheme Using Smartphone Sensors for Land Vehicle Navigation Applications in GNSS-Challenging Environments




Abstract
:1. Introduction
2. Methods
2.1. Integration Scheme
2.2. Model Design
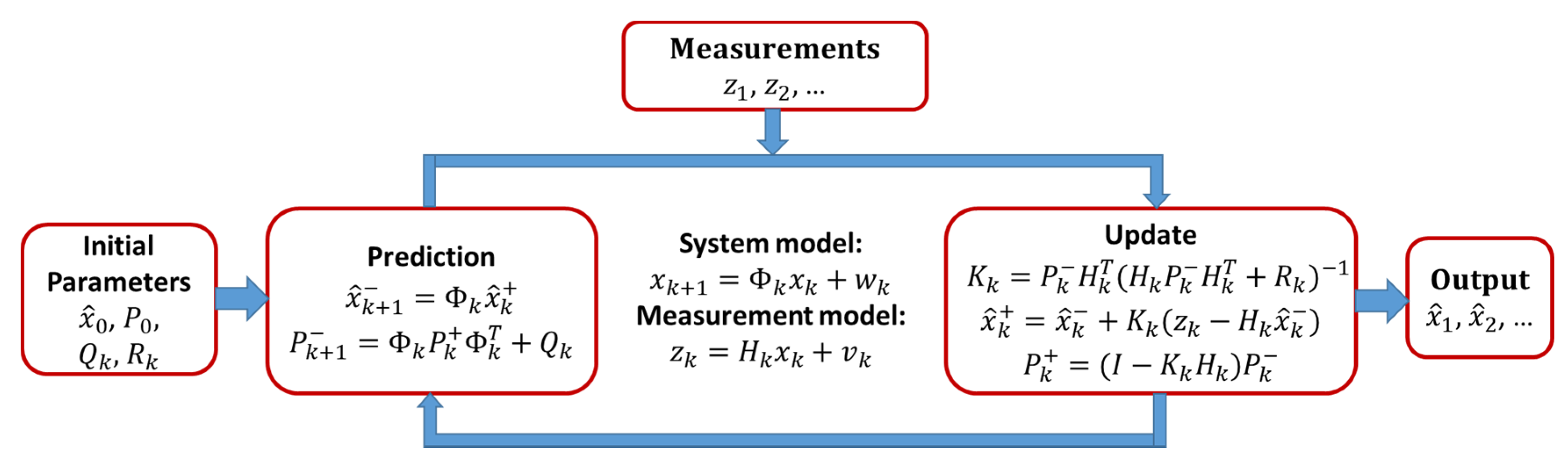
2.3. Estimation Using EKF
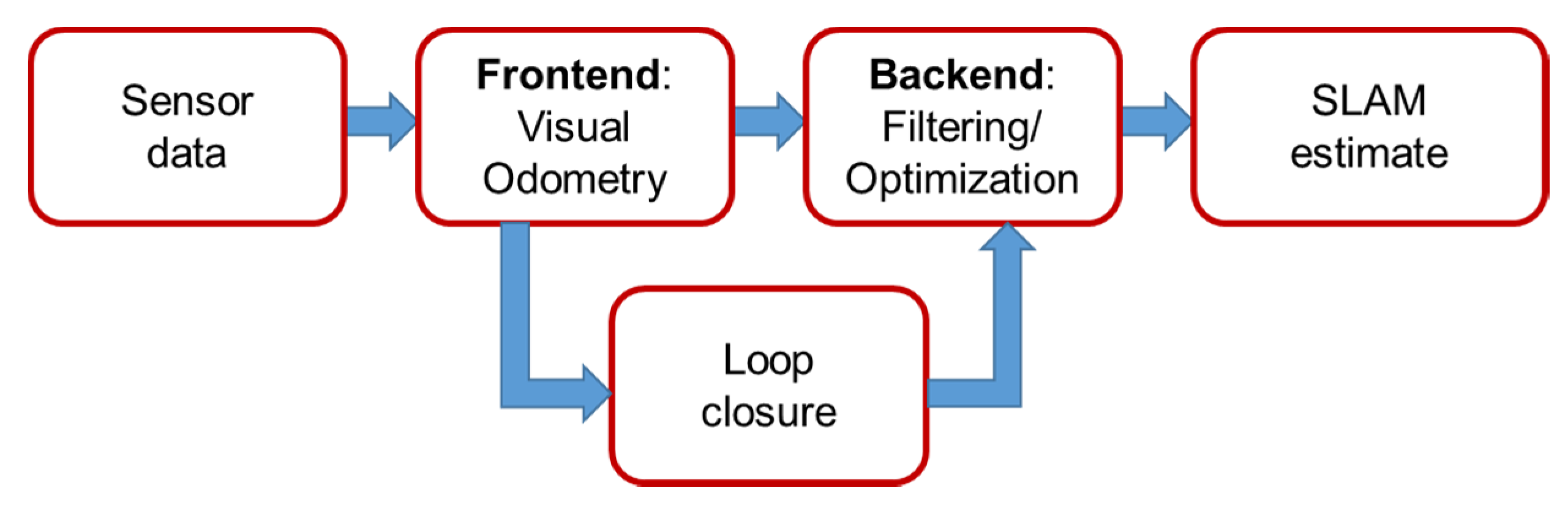
2.4. V-SLAM
3. Field Test Description and Data Processing Strategy
3.1. Navigation Sensor and Field Work
3.1.1. Tested Smartphones and Reference Navigation System
3.1.2. Smartphone Setup and Field Experiment
3.2. Reference Trajectory Establishment and Smartphone Data Preprocessing
3.2.1. Reference Trajectory Establishment
3.2.2. Smartphone Data Recording and Preprocessing
4. Results and Discussion
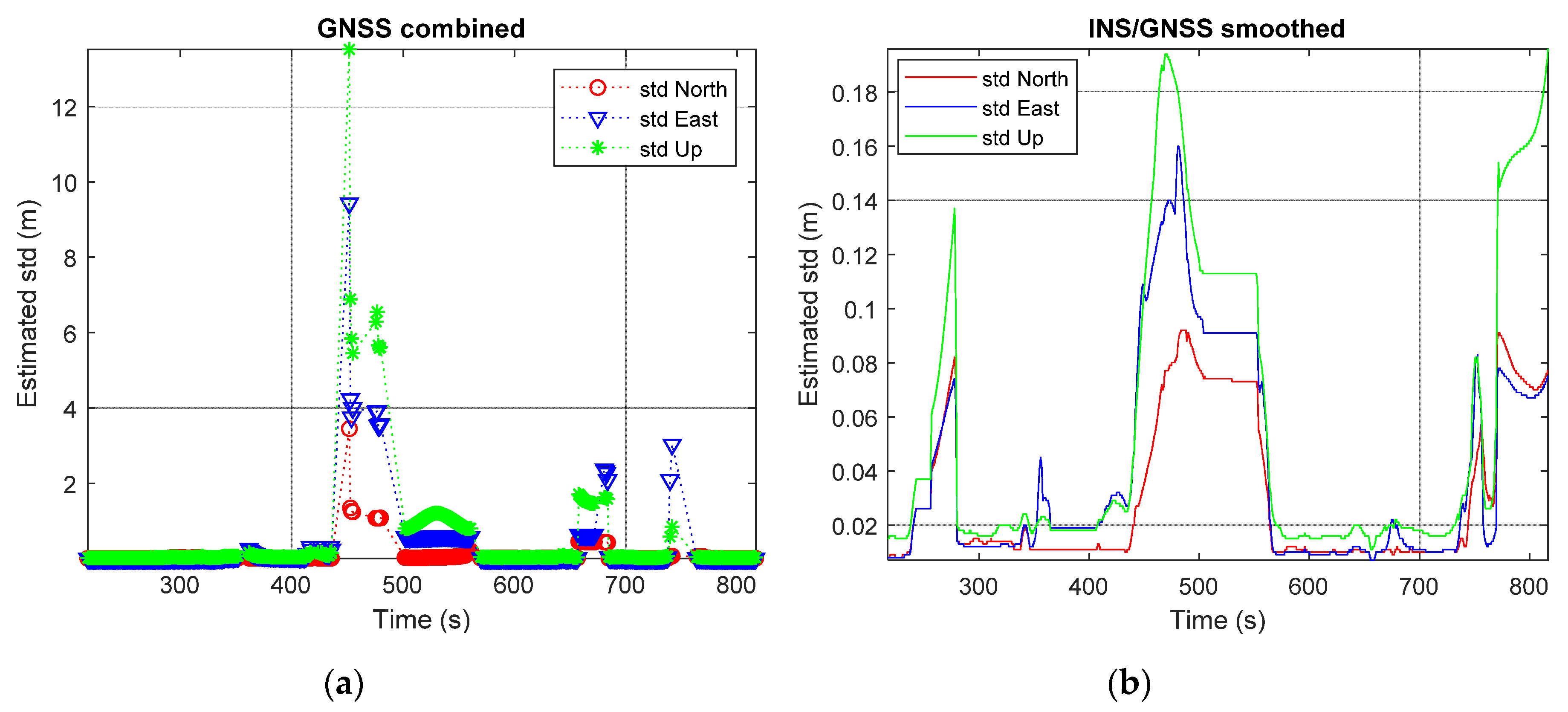
4.1. Test Results Using Sony Xperia Z3
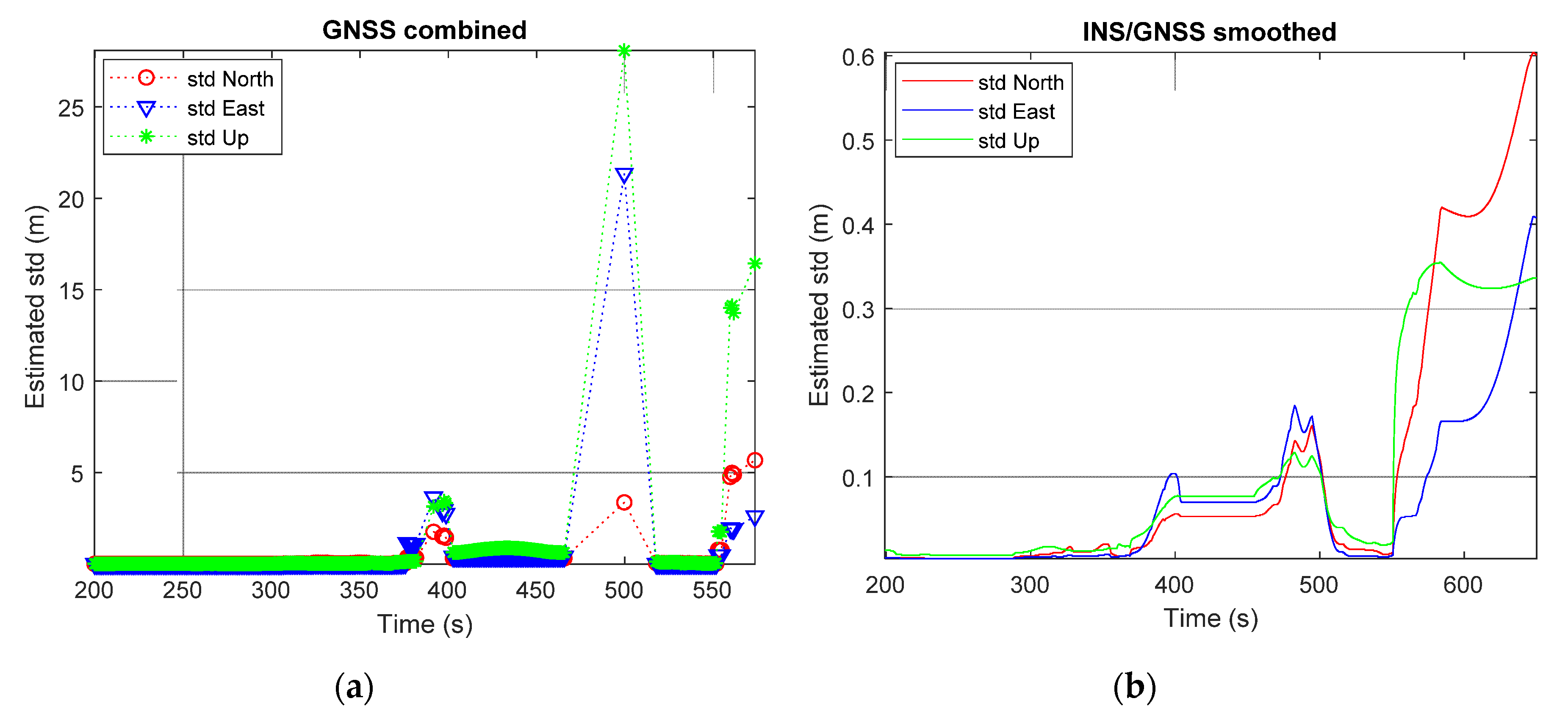
4.2. Test Results Using Lenovo Tango
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ali, A. Low-Cost Sensors-Based Attitude Estimation for Pedestrian Navigation in GPS-Denied Environments. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2013. [Google Scholar]
- Liao, J.-K.; Chiang, K.-W.; Zhou, Z.-M. The performance analysis of smartphone-based pedestrian dead reckoning and wireless locating technology for indoor navigation application. Inventions 2016, 1, 25. [Google Scholar] [CrossRef] [Green Version]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; MIT Press: Cambridge, MA, USA, 2004; Volume 207. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation System; Artech House: London, UK, 2013. [Google Scholar]
- Spaenlehauer, A.; Frémont, V.; Şekercioğlu, Y.A.; Fantoni, I. A loosely-coupled approach for metric scale estimation in monocular vision-inertial systems. In Proceedings of the 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Daegu, Korea, 16–18 November 2017; pp. 137–143. [Google Scholar]
- Walter, O.; Schmalenstroeer, J.; Engler, A.; Haeb-Umbach, R. Smartphone-based sensor fusion for improved vehicular navigation. In Proceedings of the 2013 10th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 20–21 March 2013; pp. 1–6. [Google Scholar]
- Niu, X.; Zhang, Q.; Li, Y.; Cheng, Y.; Shi, C. Using inertial sensors of iPhone 4 for car navigation. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 555–561. [Google Scholar]
- Dissanayake, G.; Sukkarieh, S.; Nebot, E.; Durrant-Whyte, H. The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications. IEEE Trans. Robot. Autom. 2001, 17, 731–747. [Google Scholar] [CrossRef] [Green Version]
- Gikas, V.; Perakis, H. Rigorous performance evaluation of smartphone GNSS/IMU sensors for ITS applications. Sensors 2016, 16, 1240. [Google Scholar] [CrossRef] [PubMed]
- Al-Hamad, A.; El-Sheimy, N. Smartphones based mobile mapping systems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 29. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Q.; Wang, J.; Meng, Q.; Zhang, X.; Zeng, S. Seamless pedestrian navigation methodology optimized for indoor/outdoor detection. IEEE Sens. J. 2017, 18, 363–374. [Google Scholar] [CrossRef]
- Yan, J.; He, G.; Basiri, A.; Hancock, C. 3D Passive-Vision-Aided Pedestrian Dead Reckoning for Indoor Positioning. IEEE Trans. Instrum. Meas. 2019, 69, 1370–1386. [Google Scholar] [CrossRef]
- Wu, K.; Ahmed, A.; Georgiou, G.A.; Roumeliotis, S.I. A Square Root Inverse Filter for Efficient Vision-aided Inertial Navigation on Mobile Devices. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015. [Google Scholar]
- Speroni, E.A.; Ceolin, S.R.; dos Santos, O.M.; Legg, A.P. A low cost VSLAM prototype using webcams and a smartphone for outdoor application. In Proceedings of the 33rd Annual ACM Symposium on Applied Computing, Pau, France, 9–13 April 2018; pp. 268–275. [Google Scholar]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]
- Jekeli, C. Inertial Navigation Systems with Geodetic Applications; Walter deGruyter. Inc.: Berlin, Germany, 2000. [Google Scholar]
- Gleason, S.; Gebre-Egziabher, D. GNSS Applications and Methods; Artech House: Norwood, MA, USA, 2009. [Google Scholar]
- Jekeli, C. Geometric Reference Systems in Geodesy (2012 edition); Ohio State University, Columbus, OH, USA. 2012. Available online: https://kb.osu.edu/bitstream/handle/1811/51274/Geometric_Reference_Systems_2012.pdf (accessed on 27 May 2020).
- Chiang, K.-W.; Duong, T.T.; Liao, J.-K. The performance analysis of a real-time integrated INS/GPS vehicle navigation system with abnormal GPS measurement elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering; Wiley: New York, NY, USA, 1992; Volume 3. [Google Scholar]
- Grewal, M.S.; Andrews, A. Kalman Filtering: Theory and Practice Using MATLAB, 2nd ed.; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef] [Green Version]
- Yousif, K.; Bab-Hadiashar, A.; Hoseinnezhad, R. An overview to visual odometry and visual SLAM: Applications to mobile robotics. Intell. Ind. Syst. 2015, 1, 289–311. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Aqel, M.O.; Marhaban, M.H.; Saripan, M.I.; Ismail, N.B. Review of visual odometry: Types, approaches, challenges, and applications. SpringerPlus 2016, 5, 1897. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Afia, A.B. Development of GNSS/INS/SLAM Algorithms for Navigation in Constrained Environments. Ph.D. Thesis, University of Toulouse, Toulouse, France, 2017. [Google Scholar]
- Lim, H.; Lim, J.; Kim, H.J. Real-time 6-DOF monocular visual SLAM in a large-scale environment. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1532–1539. [Google Scholar]
- Scaramuzza, D.; Fraundorfer, F. Visual odometry, Part 1. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: London, UK, 2005. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sony Xperia Z3 | Lenovo Tango | |
|---|---|---|
| Processor | Qualcomm MSM8974AC | Qualcomm MSM8976 |
| Snapdragon 801 (28 nm); | Octa-core (4 × 1.8 GHz Cortex-A72 & 4 × 1.4 GHz Cortex-A53) | |
| Quad-core 2.5 GHz Krait | A-GPS, GLONASS | |
| GNSS chipset | A-GPS, GLONASS, BDS | BMI160 (BOSCH) |
| Accelerometer | BMA2 × 2 (BOSCH) | BMI160 (BOSCH) |
| Gyroscope | BMG160 (BOSCH) | 16 MP, PDAF |
| Camera | 20.7 MP, AF | Octa-core (4 × 1.8 GHz Cortex-A72 & 4 × 1.4 GHz Cortex-A53) |
| Accelerometer | Gyroscope | |
|---|---|---|
| Bias Instability | <15 µGal | <0.002°/h |
| Random Walk Noise | 8 µGal/ | 0.0018°/ |
| RMSE | INS/GNSS Integration | INS/GNSS/V-SLAM Integration | |
|---|---|---|---|
| Position | North (m) | 4.719 | 3.791 |
| East (m) | 4.982 | 3.864 | |
| Up (m) | 9.471 | 9.488 | |
| 3D (m) | 11.696 | 10.924 | |
| Improvement (%) | - | 6.6 | |
| Velocity | North (m/s) | 0.935 | 1.016 |
| East (m/s) | 0.978 | 0.760 | |
| Up (m/s) | 2.104 | 2.082 | |
| 3D (m/s) | 2.501 | 2.438 | |
| Improvement (%) | - | 2.5 | |
| Attitude | Roll (deg) | 1.138 | 1.022 |
| Pitch (deg) | 11.194 | 10.919 | |
| Heading (deg) | 3.633 | 3.289 | |
| Heading Improvement (%) | - | 9.5 |
| RMSE | INS/GNSS Integration | INS/GNSS/V-SLAM Integration | |
|---|---|---|---|
| Position | North (m) | 21.696 | 7.074 |
| East (m) | 5.904 | 5.791 | |
| Up (m) | 10.681 | 11.801 | |
| 3D (m) | 24.893 | 14.928 | |
| Improvement (%) | - | 40.0 | |
| Velocity | North (m/s) | 1.813 | 0.862 |
| East (m/s) | 0.976 | 0.740 | |
| Up (m/s) | 2.108 | 2.056 | |
| 3D (m/s) | 2.946 | 2.349 | |
| Improvement (%) | - | 20.3 | |
| Attitude | Roll (deg) | 1.134 | 1.137 |
| Pitch (deg) | 11.323 | 10.927 | |
| Heading (deg) | 3.895 | 3.720 | |
| Heading Improvement (%) | - | 4.5 |
| RMSE | INS/GNSS Integration | INS/GNSS/V-SLAM Integration | |
|---|---|---|---|
| Position | North (m) | 12.521 | 7.541 |
| East (m) | 14.234 | 5.022 | |
| Up (m) | 16.934 | 11.304 | |
| 3D (m) | 25.426 | 14.487 | |
| Improvement (%) | - | 43.0 | |
| Velocity | North (m/s) | 1.754 | 0.768 |
| East (m/s) | 1.815 | 0.720 | |
| Up (m/s) | 0.895 | 0.771 | |
| 3D (m/s) | 2.678 | 1.305 | |
| Improvement (%) | - | 51.3 | |
| Attitude | Roll (deg) | 1.737 | 1.675 |
| Pitch (deg) | 1.628 | 1.233 | |
| Heading (deg) | 6.083 | 5.859 | |
| Heading Improvement (%) | - | 3.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chiang, K.-W.; Le, D.T.; Duong, T.T.; Sun, R. The Performance Analysis of INS/GNSS/V-SLAM Integration Scheme Using Smartphone Sensors for Land Vehicle Navigation Applications in GNSS-Challenging Environments. Remote Sens. 2020, 12, 1732. https://doi.org/10.3390/rs12111732
Chiang K-W, Le DT, Duong TT, Sun R. The Performance Analysis of INS/GNSS/V-SLAM Integration Scheme Using Smartphone Sensors for Land Vehicle Navigation Applications in GNSS-Challenging Environments. Remote Sensing. 2020; 12(11):1732. https://doi.org/10.3390/rs12111732
Chicago/Turabian StyleChiang, Kai-Wei, Dinh Thuan Le, Thanh Trung Duong, and Rui Sun. 2020. "The Performance Analysis of INS/GNSS/V-SLAM Integration Scheme Using Smartphone Sensors for Land Vehicle Navigation Applications in GNSS-Challenging Environments" Remote Sensing 12, no. 11: 1732. https://doi.org/10.3390/rs12111732