The discussion in
Section 3 identifies that the ideal requirements for routine archaeological detection and monitoring in Scotland, as defined by the requirements outlined in
Section 2, cannot be achieved by using satellite data acquired for general purposes, which is not to negate the potential utility of such data in other contexts (e.g., [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10]). Tasking a constellation of 12 spacecraft did allow for suitable imagery to be collected of a small region of Scotland, but the competing needs of other customers imply that extending this to provide routine, systematic coverage of the entirety of Scotland would be challenging. This reinforces many of the limitations to the effectiveness of archaeological applications of satellite data discussed in general terms in
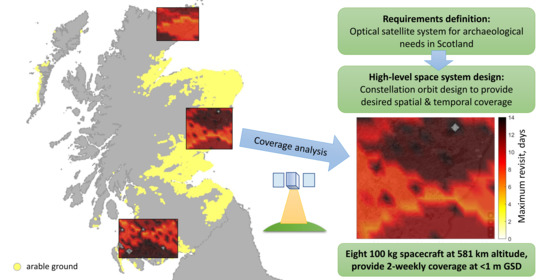
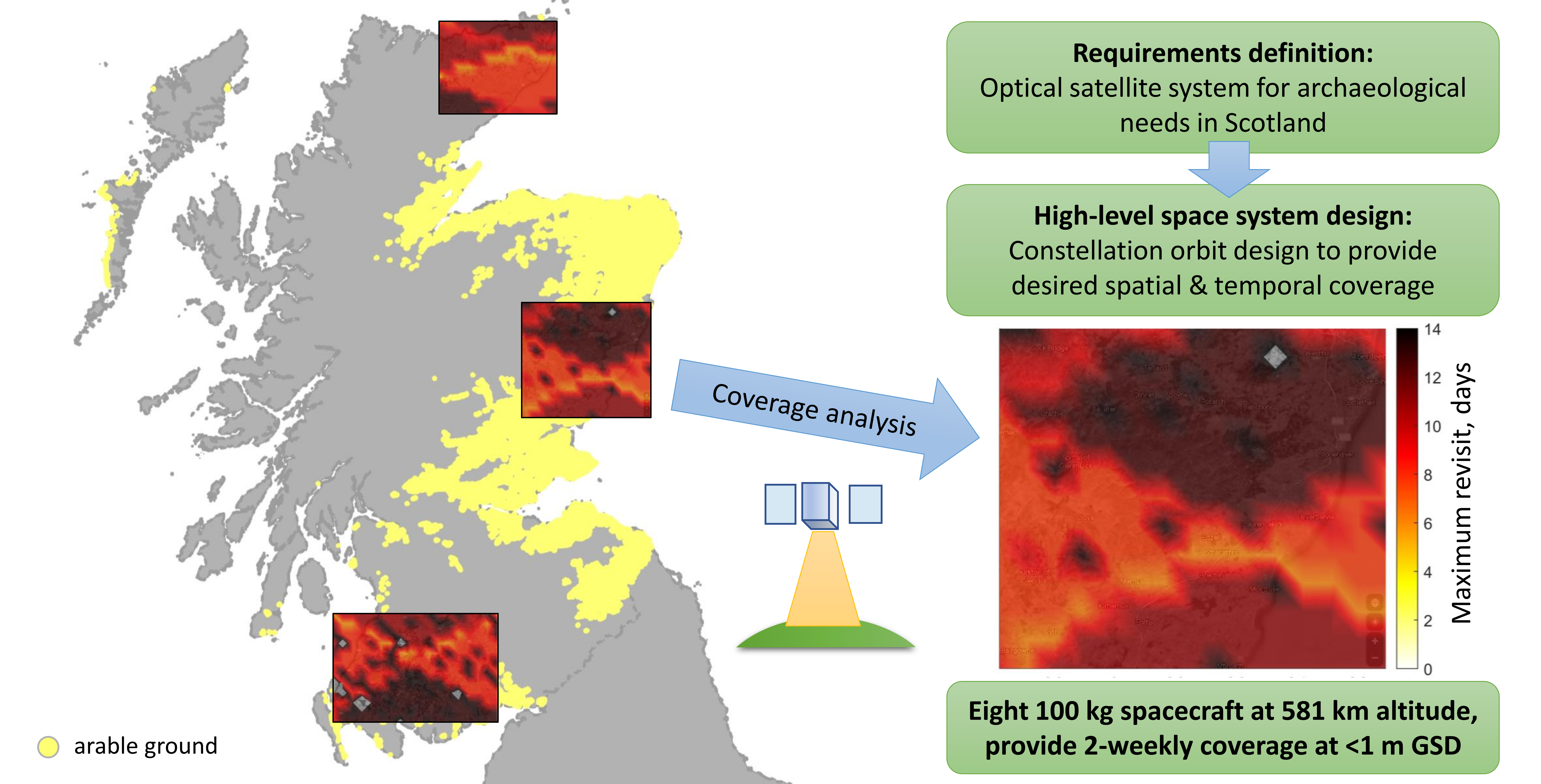
Section 1. From that position, a high-level design for a bespoke space system is developed and presented. It should be noted that this design is based on requirements derived for specific archaeological priorities in Scotland. As such, the space system specified may not be ideal for archaeological purposes elsewhere; however, the design methodology presented, and the general insights obtained, could be applied to any region.
4.2. Orbit Design
The orbit selected for the spacecraft will greatly influence the coverage and revisit capabilities of the system. Using the SkySat parameters defined in
Section 4.1 as a baseline, an orbit is selected with the intent of maximising coverage of Scotland, and an estimation is made of the number of spacecraft required within this orbit to provide the desired revisit times. Circular orbits are assumed to be used due to ease of orbit insertion and operational maintenance.
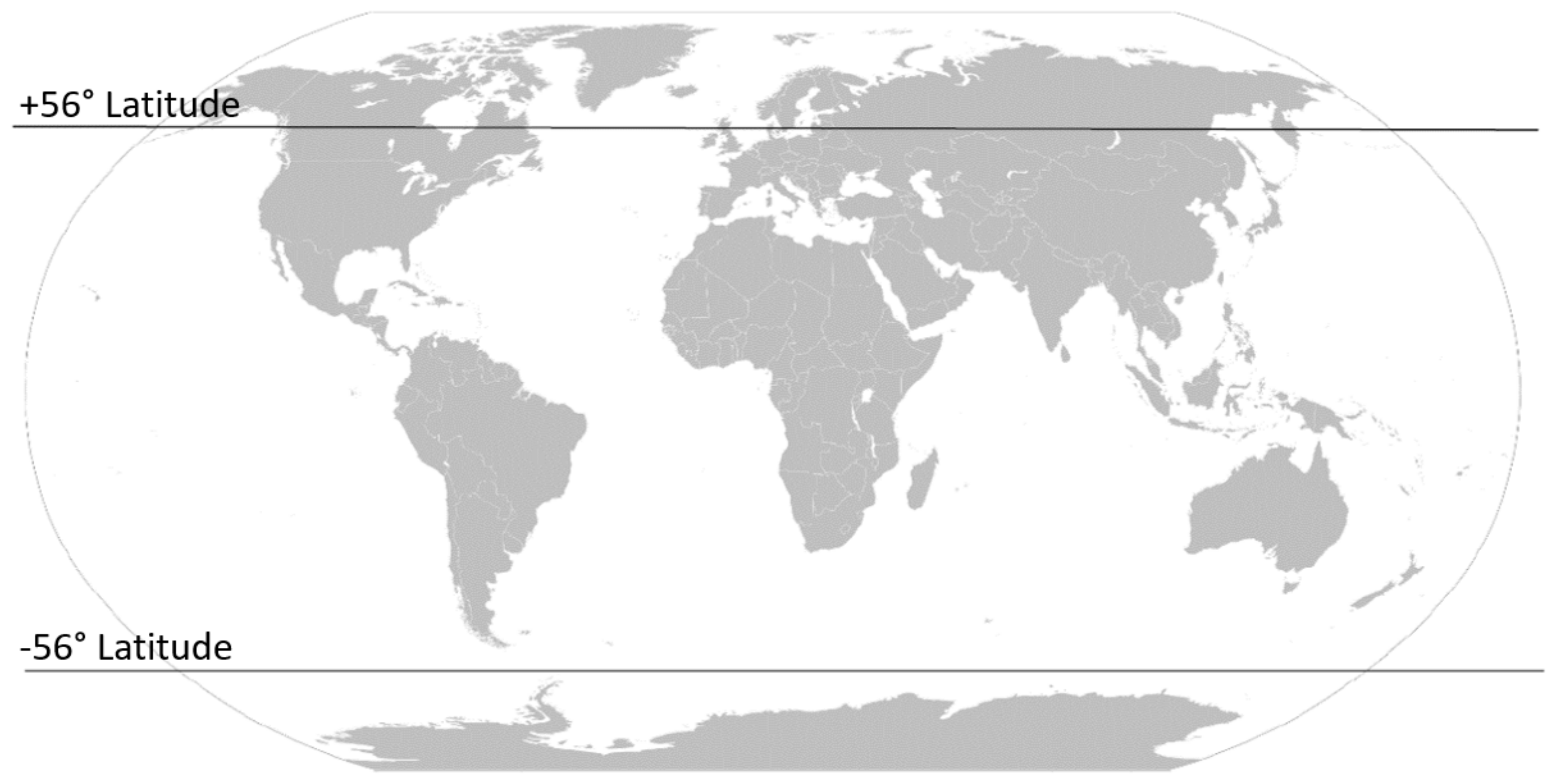
Altitude is one of the most significant parameters for the orbit design as it will influence the spatial resolution and swath width of the payload instrument; a lower altitude will result in a higher resolution image, but a narrower swath width. Inclination, which describes the angle between the orbit plane and the Earth’s equator, is another critical parameter in orbit design. The inclination is critical for two primary reasons. Firstly, the most northerly and southerly latitude a spacecraft will pass over is defined by the orbit inclination such that the geodetic latitude, δ, range of the spacecraft coverage can be defined as, where
, where
i is the orbit inclination in degrees and
f is the Earth flattening factor to allow for conversion from geocentric to geodetic latitude [
30]. It should be noted that depending on the swath width of the imager and the pointing capabilities of the spacecraft, it may be possible to view latitudes beyond this range. Secondly, spacecraft will have the shortest revisit period over regions at the most northerly and southerly viewable latitudes. The revisit time will generally increase as the latitude of the location of interest approaches the equator. The SkySat spacecraft operate in sun-synchronous orbits. A sun-synchronous orbit is a near-polar orbit where the average rate of nodal precession (i.e., the rate at which the spacecraft orbit rotates around the Earth’s axis of rotation) is the same as the Earth’s average rate of orbit around the sun. This synchronicity means that the relative time of day along the satellite’s ground track remains approximately the same for each orbit pass. This is especially useful for Earth observing satellites as it ensures consistent lighting conditions each time a region is observed. Furthermore, as a near-polar orbit it allows for the entirety of the Earth to be observed. However, sun-synchronous orbits generally have an inclination of 96 deg <
i < 99 deg, depending on the orbit altitude, and hence provide maximum coverage in the region of 81 deg <
δ < 84 deg.
In order to estimate the revisit time for a satellite in a sun-synchronous orbit over the entirety of Scotland, the time to provide full coverage of the lowest latitude of interest is calculated, assuming no overlaps between passes. The southernmost point of Scotland is the Mull of Galloway, with a latitude of approximately 54.63 deg. The circumference of the circle defined by a given line of latitude,
cδ, can be estimated as [
31]
where
is the Earth equatorial radius, taken as 6378 km,
is the Earth flattening factor and
is the geodetic latitude of interest. The circumference of the Earth at 54.63 deg latitude is hence estimated as 23135 km, assuming a flattening factor
of
as given by the World Geodetic System 1984 [
32].
The width of a latitude band covered by an inclined spacecraft in a single pass,
, with a swath width,
, will depend on the direction of motion of the spacecraft relative to the line of latitude at nadir. At the equator, the relative angle between the spacecraft direction of motion and that of the line of latitude,
, will be
, where
is the orbit inclination, while at a latitude
, there will be
. This angle
can be calculated [
33] as
where
is the rotational rate of the Earth, taken as 7.2921
rad/s. The width of the latitude band covered in a single pass is then
It should be noted that as the latitude of interest, , approaches the orbit inclination, , the width covered will tend to infinite; as such the above approximation is not valid at latitudes close to . For a swath width of 6.6 km, and a spacecraft inclined at 97 deg, this gives a width covered, , at 54.63 deg latitude of 6.8 km, meaning 3417 passes would be required for full coverage at 54.63 deg latitude, assuming no overlap between passes.
The orbit period,
, of a spacecraft in a circular orbit is
where
is the orbit altitude,
is the mean Earth radius, taken as 6371 km, and
is the standard gravitational parameter of the Earth, taken as 3.986
m
3/s
2. A spacecraft at an altitude of 500 km would have an orbit period of 94.47 min and therefore would require approximately 224 days to achieve 3417 passes; this gives a revisit time of approximately 224 days at 54.63 deg latitude. Assuming spacecraft could be distributed to provide no overlap in coverage, 16 spacecraft would hence be required to meet the desired revisit criteria of two weeks.
In order to minimise the revisit time of a spacecraft over a region, an inclination can be selected that is greater than, but close to, the most northerly latitude of interest. For Scotland, this is approximately 60 deg. For an orbit inclined at 60 deg, the width covered by a spacecraft with a swath of 6.6 km in a single pass at 54.63 deg increases to 13.1 km, as calculated using Equations (2) and (3), meaning 1761 passes are required to cover the full Earth’s circumference at 54.63 deg latitude. This would take 116 days for a single spacecraft, using the orbit period calculated with Equation (4), and so nine spacecraft could meet the two-week requirement—a significant improvement in comparison to the sun-synchronous case.
Increasing the spacecraft altitude will increase the swath width but decrease the GSD; this provides an opportunity to fine-tune the performance of the space system to, potentially, further reduce the number of spacecraft required. The relationship between GSD, swath width,
, and spacecraft altitude,
, can be expressed as
where
is the sensor width,
is the photosite pitch and
is the instrument focal length [
34]. Assuming the sensor parameters
,
, and
remain constant, both the GSD and swath width vary linearly with altitude according to Equation (5). Estimating the GSD and swath width at a given altitude using Equation (5) gives the results shown in
Table 3. The number of spacecraft that would be required to provide a two-week revisit of Scotland at each altitude for a 60 deg inclined orbit as calculated using Equations (2)–(4) are also given. Note that the number of spacecraft required is rounded up to the nearest whole and the values should be considered a minimum as eclipse periods, cloud cover, and tasking restrictions may impact the spacecraft performance. The general trend is that a higher altitude gives a reduction in the number of spacecraft required, with diminished returns at greater altitudes. If the upper limit on GSD is taken as 1 m, then the minimum number of spacecraft needed will be seven, at an altitude of <700 km.
Orbit altitude will also directly impact the spacecraft on-orbit lifetime. A spacecraft in low-Earth orbit, that is with an altitude <1000 km, will experience drag due to the Earth’s atmosphere. Over time this will cause the spacecraft altitude to reduce, ultimately resulting in the spacecraft naturally deorbiting. A spacecraft orbit should be sufficiently high to ensure a suitable operational life for the spacecraft prior to deorbit, while also ideally complying with the UN Space Debris Mitigation Guideline to “limit the long-term presence of spacecraft and launch vehicle orbital stages in the low-Earth orbit (LEO) region after the end of their mission” [
35]. Generally, this guideline is considered to be met if the spacecraft will naturally deorbit within 25 years of the end of the mission.
Assuming a power law fit to the 1976 standard atmosphere [
36], the time for a spacecraft to naturally decay to a certain altitude,
, as a function of time can be defined as [
37]
where
is the initial spacecraft altitude,
is the coefficient of drag, taken as 2.2, and
and
are coefficients of the power law taken as 7.201 and
, respectively. For a spacecraft with a mass,
, of 100 kg and a cross-sectional area,
, of 1 m
2 (similar to those of SkySat), and with de-orbit assumed to occur at an altitude of 100 km, the time to deorbit from a range of possible orbit altitudes are shown in
Table 3. A spacecraft in an orbit of 500 km or lower will deorbit naturally in less than five years, meaning that significant on-board propulsion would be required to maintain the spacecraft altitude and meet the requirement for a minimum operational life of five years. A 600 km orbit seems suitable as it requires the minimum number of spacecraft while still meeting the 25 year natural deorbit requirement and providing <1 m GSD.
4.3. Detailed Constellation Design and Simulation
Based on the coverage estimates made in
Section 4.2, a 600 km altitude, 60 deg inclined orbit is selected as a baseline for the constellation. In order to ensure a 14 day revisit over Scotland, a repeating ground-track (RGT) orbit is designed [
38]. It is calculated that for a spacecraft in a 60 deg inclined orbit, an altitude of 581.077 km will give a repeat period of 207 orbits in 14 days. At this altitude, the width covered by a single spacecraft pass at 54.63 deg latitude, the lowest latitude of interest, is 15.3 km as calculated using Equations (2) and (3), meaning eight spacecraft would be required for full coverage in 14 days. To ensure an even distribution of coverage, the spacecraft should be organised in a ‘train formation’ such that one edge of the swath of the first spacecraft passing 54.63 deg latitude is aligned exactly with the opposite edge of the swath of the subsequent spacecraft [
39]. The time for Earth to rotate such that the surface at 54.63 deg latitude will move through a distance equal to the width seen by the spacecraft at the latitude of interest,
, can be estimated as
where
is the rotational rate of Earth, and
is the circumference of the circle of the latitude of interest. The spacecraft should then be separated through true anomaly (i.e., within the orbit plane) such that a following spacecraft will reach the true anomaly of the previous spacecraft in the time
. This separation can be calculated, in radians, as
where
is the orbit period, as calculated using Equation (4). For spacecraft in a RGT orbit at 581.077 km, this gives a required true anomaly separation between spacecraft of approximately 3.556 deg.
An orbit propagator is used to estimate the coverage that could be expected from a constellation of eight spacecraft in a 581.077 km altitude, 60 deg inclined orbit, with a separation between spacecraft of 3.556 deg through true anomaly. Using Equation (5), the spacecraft are calculated to have a swath width of 7.7 km at 581.077 km altitude and the simulation is carried out for a 30 day period. The propagator uses the Gauss/Lagrange planetary equations [
40] to calculate the change in the Keplerian orbit elements of the spacecraft over time. J
2, which is the perturbation due to an oblate central body, is the only perturbation included [
41]. Drag and other forces acting on the satellite are disregarded as they are considered small when compared to the J
2 effect. The satellite ground track and associated coverage is calculated assuming a spherical Earth. The constants and orbit parameters used in this analysis are given in
Table 4 and
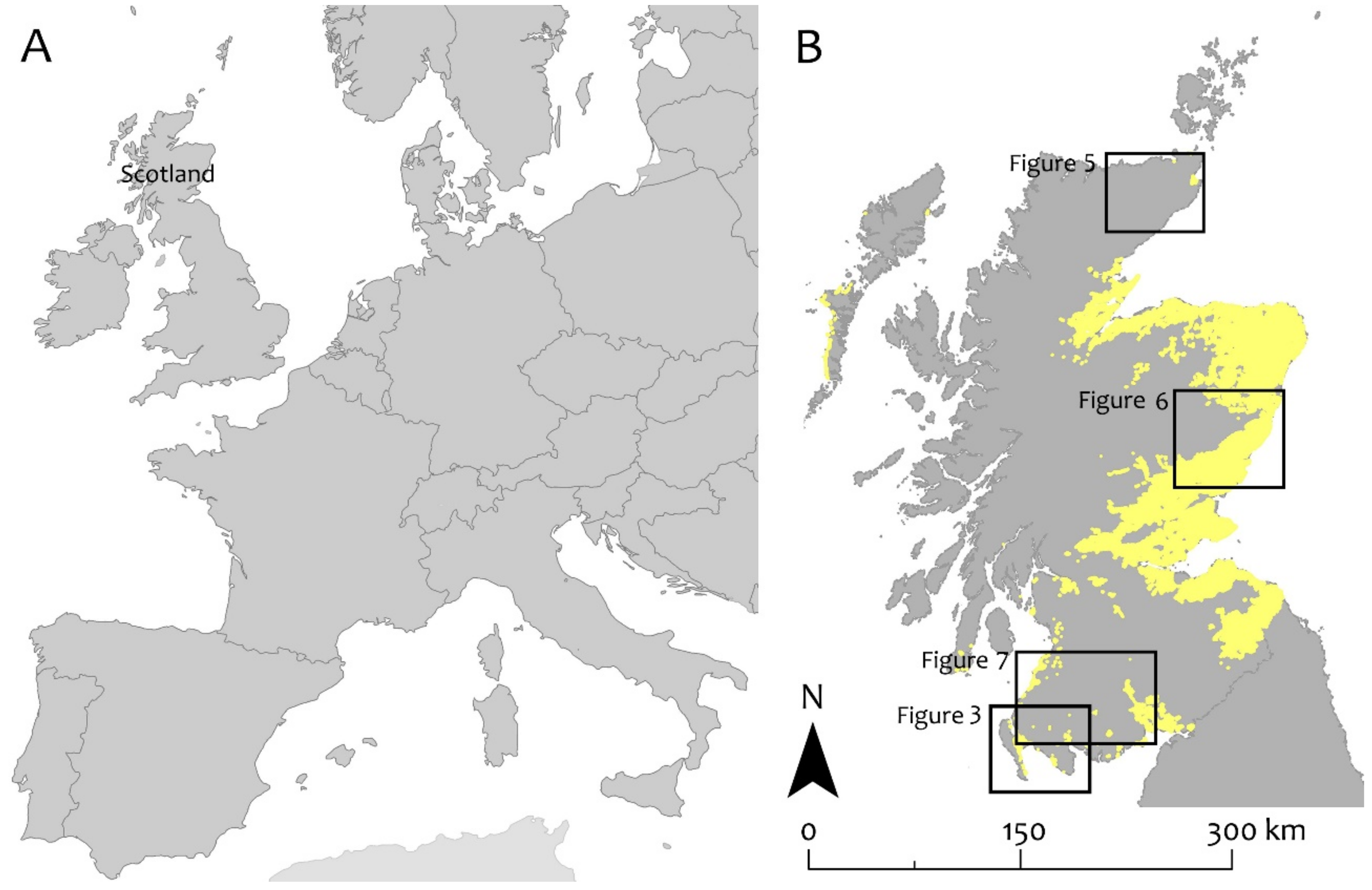
Table 5, respectively. The epoch date of 1 June 2020 is arbitrarily chosen for this example study. Sample sections of the north, east and south of Scotland are considered to reduce computational complexity, selected on the basis of the areas of interest (
Figure 2 and
Table 6).
The orbit simulation results are summarised in
Table 7 and visualised in
Figure 5,
Figure 6 and
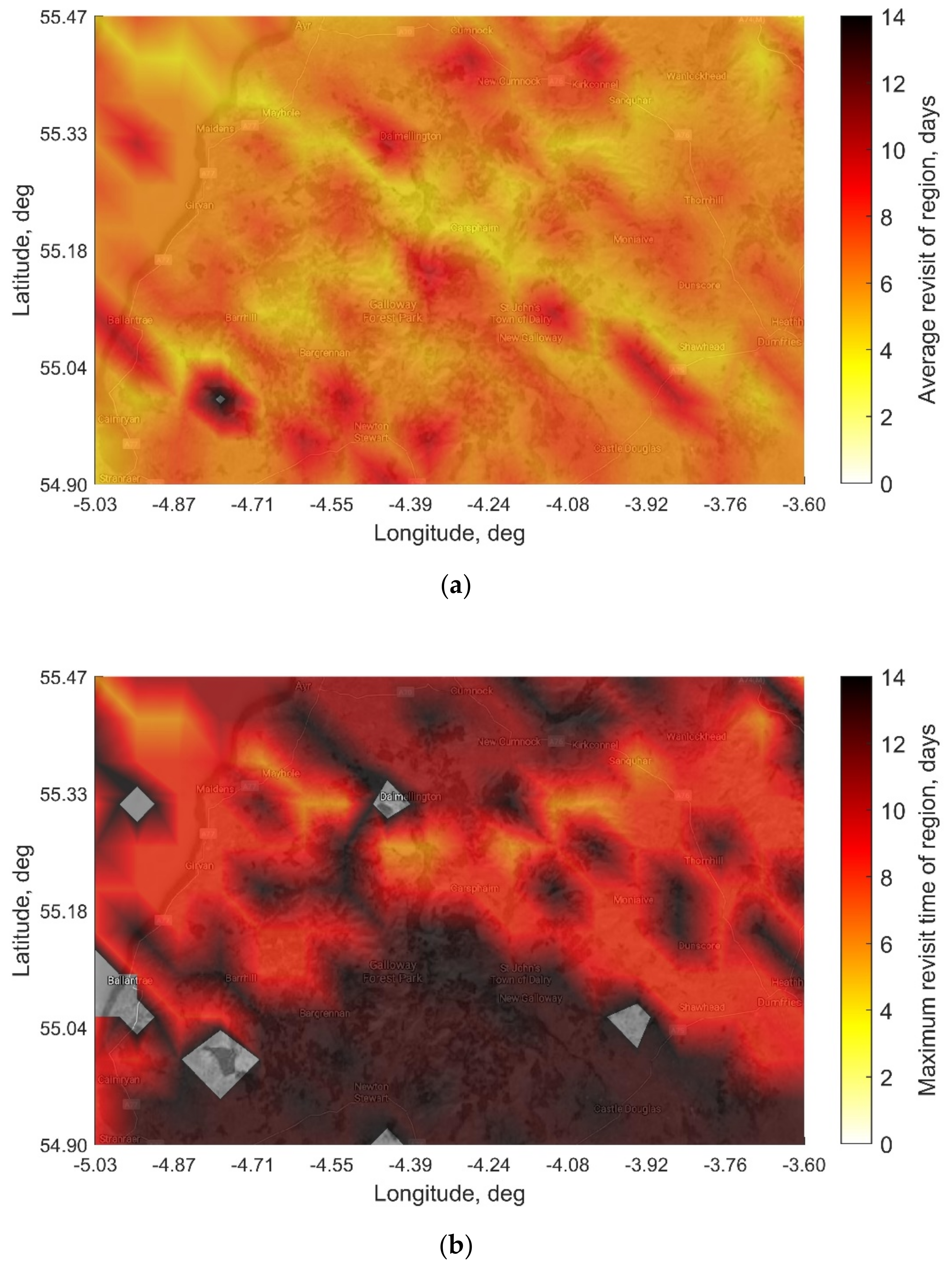
Figure 7. For each region selected, the average time between viewings (the average revisit time across all discrete points in the region) is less than seven days and each discrete point in the regions would be seen an average of 11–22 times, depending on latitude. 100% of the northern region, 99% of the eastern region, and 97% of the southern region are observed with a maximum revisit time of less than 14 days, though it should be noted that cloud cover and lighting conditions would mean that only a portion of the passes would be useable. There are a small number of points with maximum revisit times in excess of 14 days shown as grey regions in
Figure 5,
Figure 6 and
Figure 7. These points of high maximum revisit are likely a result of inaccuracies in the calculation of the RGT orbit altitude and satellite distribution and could be addressed through precision orbit design. It should also be noted that maintaining the precise RGT orbit altitude and spacecraft distribution would necessitate active orbit maintenance using on-board propulsion.
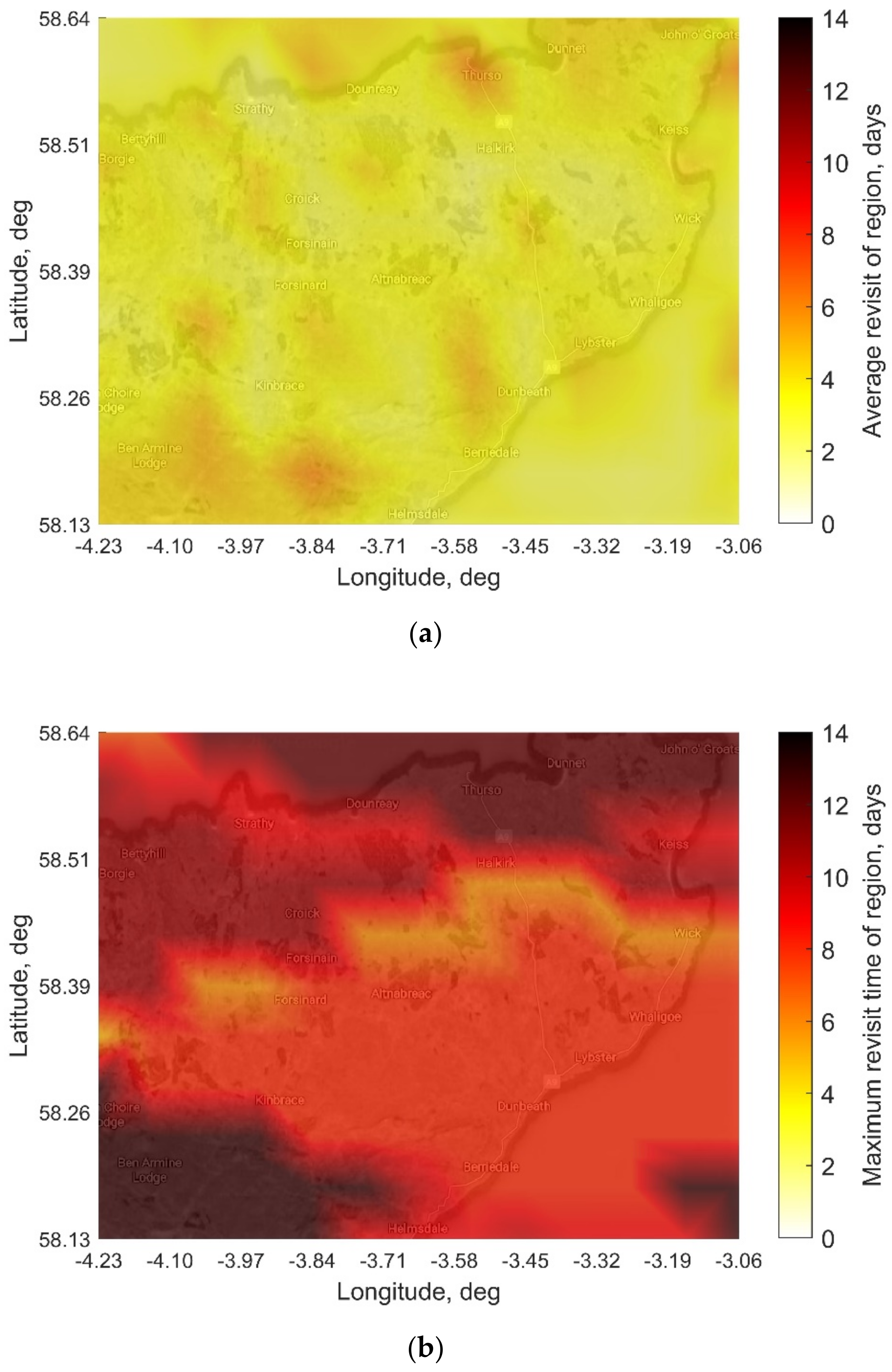
Figure 5.
Maps of the north region of interest as described in
Table 6 and indicated on
Figure 2. The maps are oriented with north to the top and cover an area of approximately 57 km (N-S)
68 km (E-W). The colours overlaid on the maps indicate the (
a) average and (
b) maximum revisit times of each location in the region after 30 days. Coverage is calculated at approximately 5 km intervals and interpolated to provide the coverage estimates for the full region of interest (Map data: Google, TerraMetrics,
www.google.com/maps [retrieved 16 March 2020]).
Figure 5.
Maps of the north region of interest as described in
Table 6 and indicated on
Figure 2. The maps are oriented with north to the top and cover an area of approximately 57 km (N-S)
68 km (E-W). The colours overlaid on the maps indicate the (
a) average and (
b) maximum revisit times of each location in the region after 30 days. Coverage is calculated at approximately 5 km intervals and interpolated to provide the coverage estimates for the full region of interest (Map data: Google, TerraMetrics,
www.google.com/maps [retrieved 16 March 2020]).
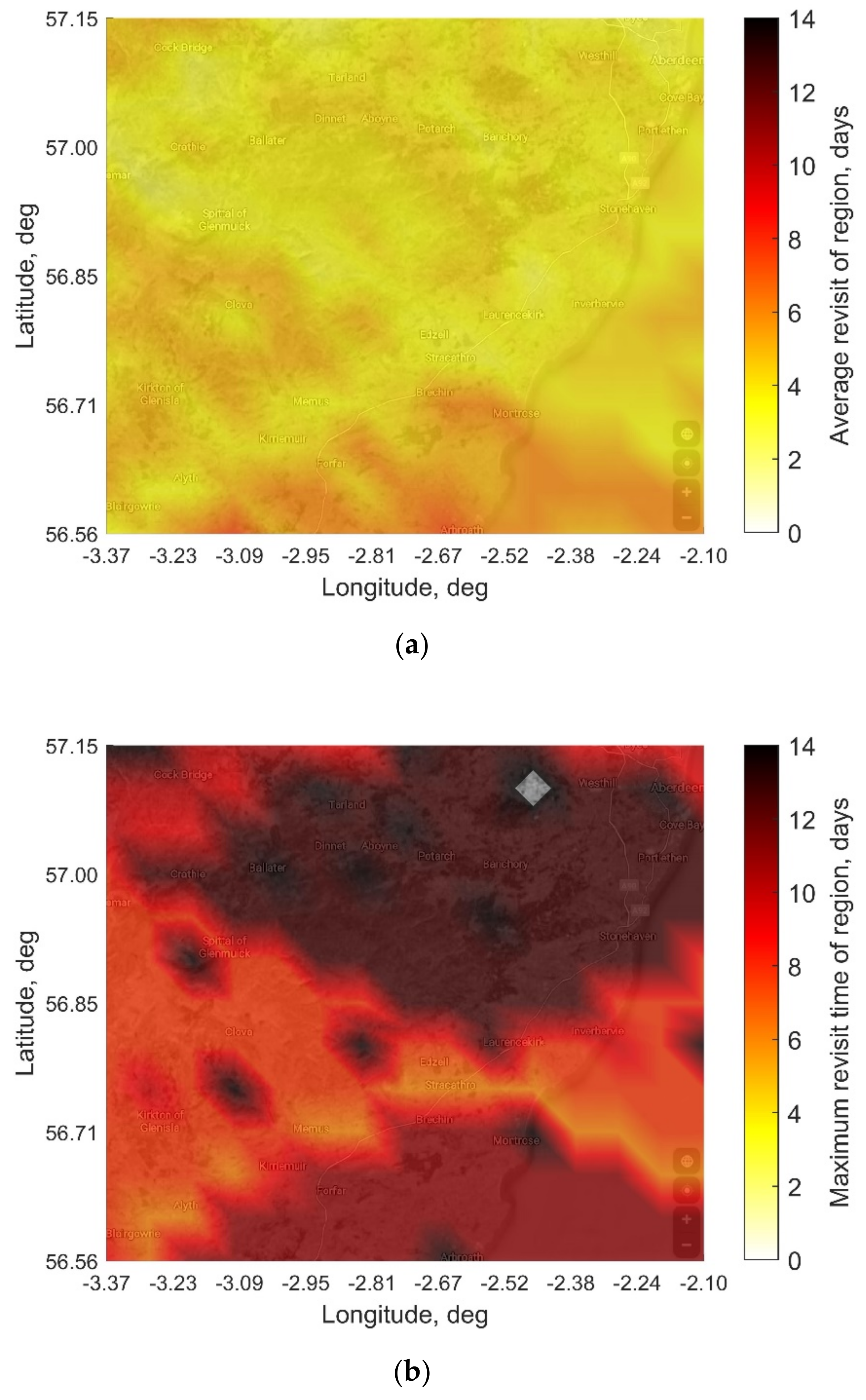
Figure 6.
Maps of the east region of interest as described in
Table 6 and indicated on
Figure 2. The maps are oriented with north to the top and cover an area of approximately 65 km (N-S)
77 km (E-W). The colours overlaid on the maps indicate the (
a) average and (
b) maximum revisit times of each location in the region after 30 days. Coverage is calculated at approximately 5 km intervals and interpolated to provide the coverage estimates for the full region of interest. (Map data: Google, TerraMetrics,
www.google.com/maps [retrieved 16 March 2020]).
Figure 6.
Maps of the east region of interest as described in
Table 6 and indicated on
Figure 2. The maps are oriented with north to the top and cover an area of approximately 65 km (N-S)
77 km (E-W). The colours overlaid on the maps indicate the (
a) average and (
b) maximum revisit times of each location in the region after 30 days. Coverage is calculated at approximately 5 km intervals and interpolated to provide the coverage estimates for the full region of interest. (Map data: Google, TerraMetrics,
www.google.com/maps [retrieved 16 March 2020]).
Figure 7.
Maps of the south region of interest as described in
Table 6 and indicated on
Figure 2. The maps are oriented with north to the top and cover an area of approximately 63 km (N-S)
90 km (E-W). The colours overlaid on the maps indicate the (
a) average and (
b) maximum revisit times of each location in the region after 30 days. Coverage is calculated at approximately 5 km intervals and interpolated to provide the coverage estimates for the full region of interest. (Map data: Google, TerraMetrics,
www.google.com/maps [retrieved 16 March 2020]).
Figure 7.
Maps of the south region of interest as described in
Table 6 and indicated on
Figure 2. The maps are oriented with north to the top and cover an area of approximately 63 km (N-S)
90 km (E-W). The colours overlaid on the maps indicate the (
a) average and (
b) maximum revisit times of each location in the region after 30 days. Coverage is calculated at approximately 5 km intervals and interpolated to provide the coverage estimates for the full region of interest. (Map data: Google, TerraMetrics,
www.google.com/maps [retrieved 16 March 2020]).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}