
Laboratory Investigation on Detecting Bridge Scour Using the Indirect Measurement from a Passing Vehicle

 , ,
, ,
Abstract
:
1. Introduction
2. Numerical Modelling
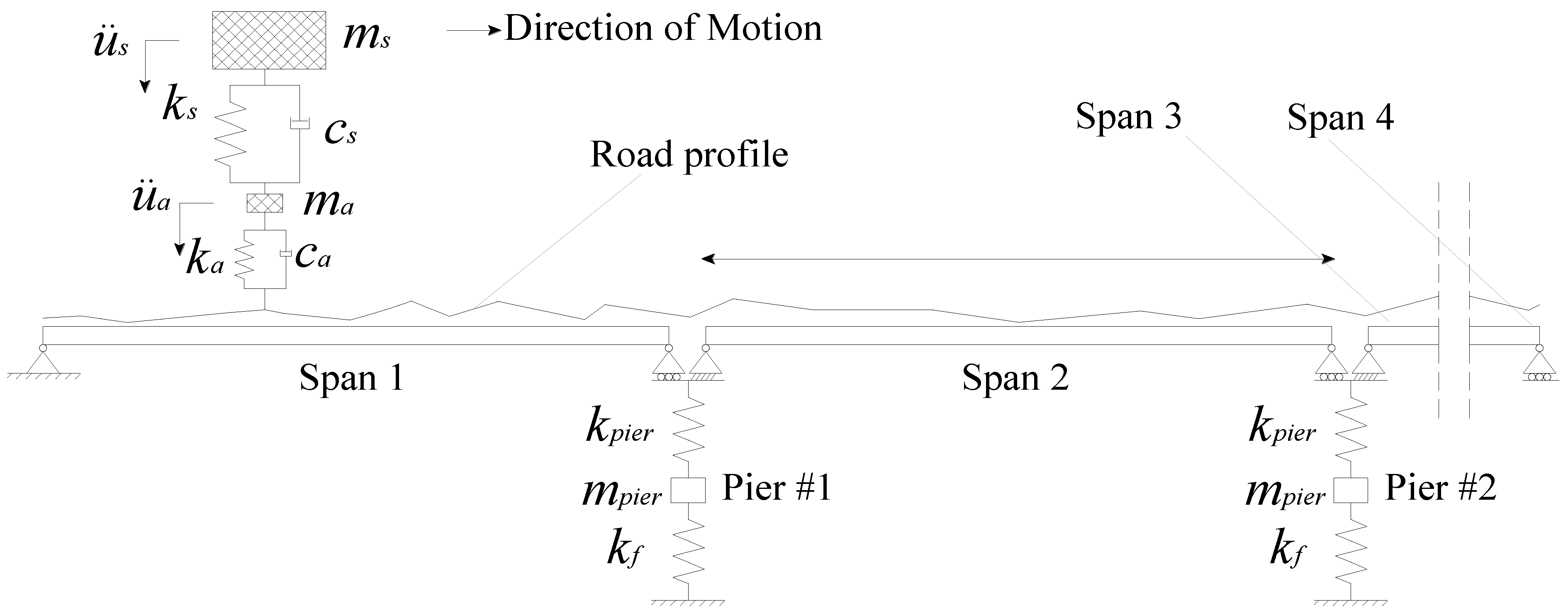
2.1. Vehicle Model
2.2. Bridge Model
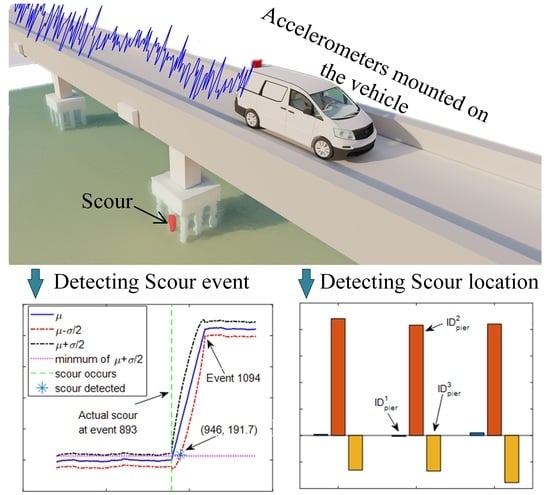
3. Scour Detection Approach
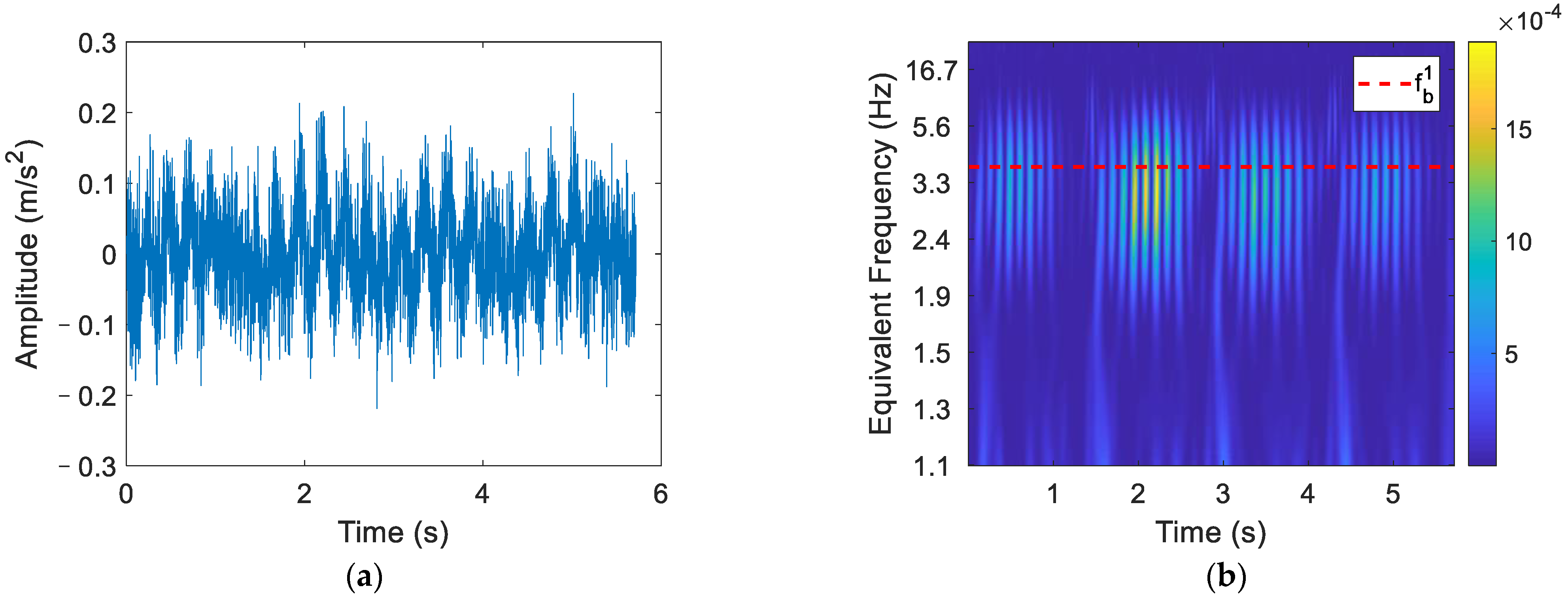
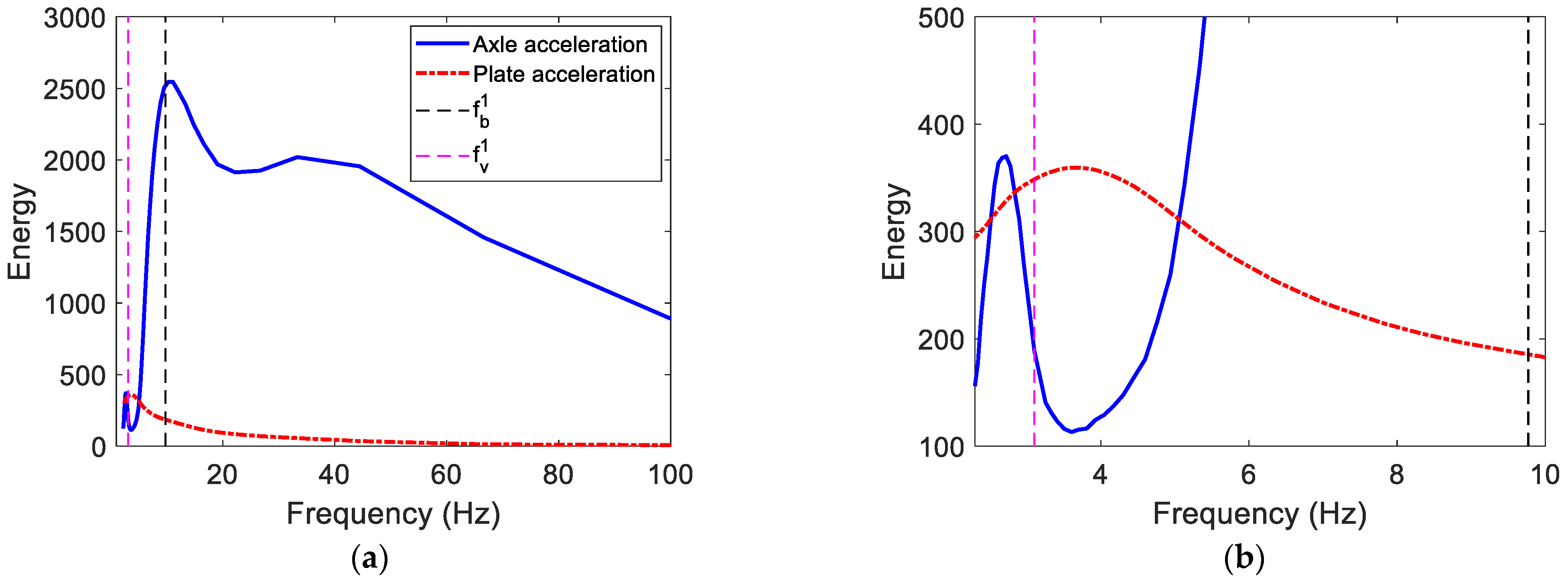
3.1. Wavelet Analysis
3.2. Addition of Environment Variable to Vehicle Acceleration
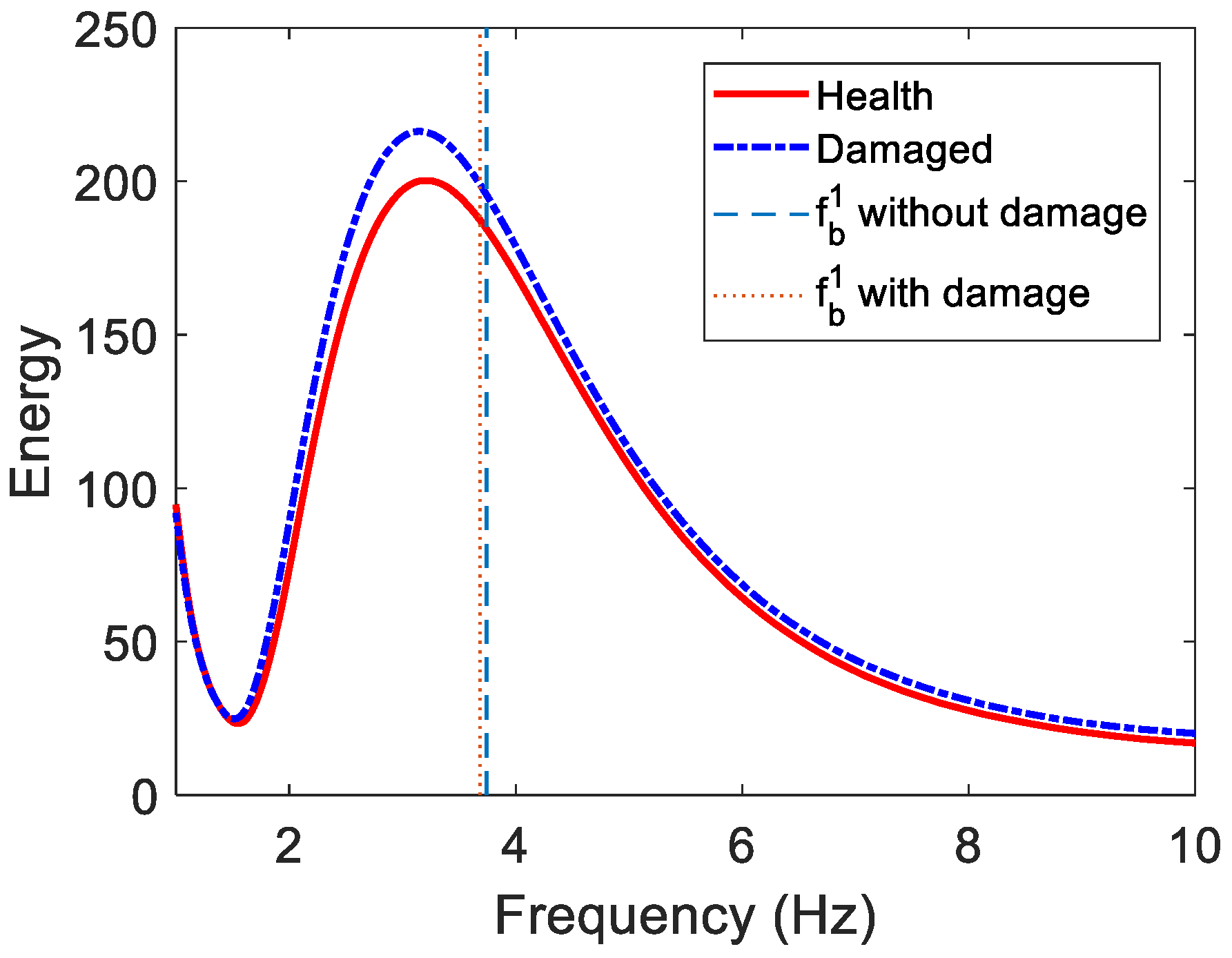
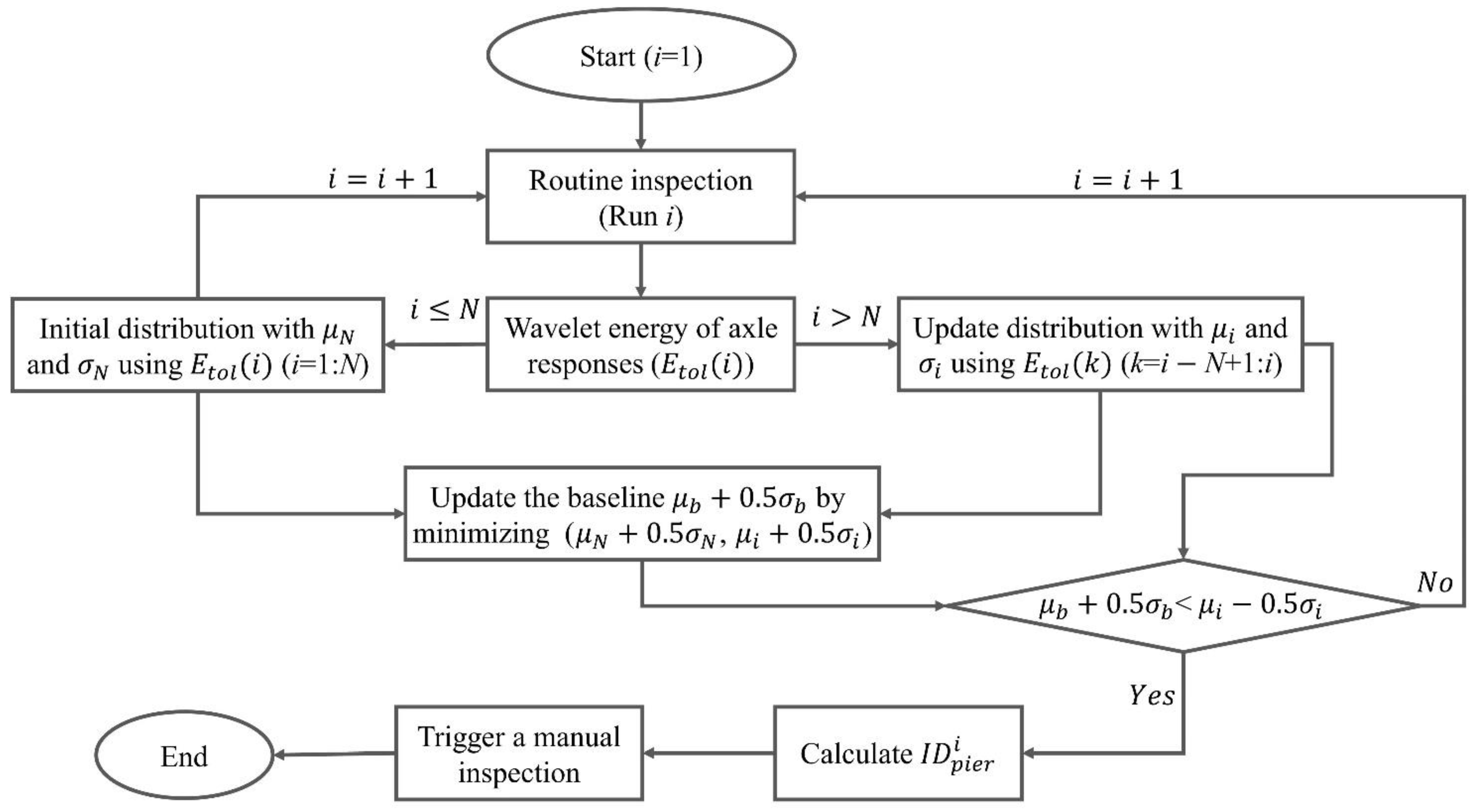
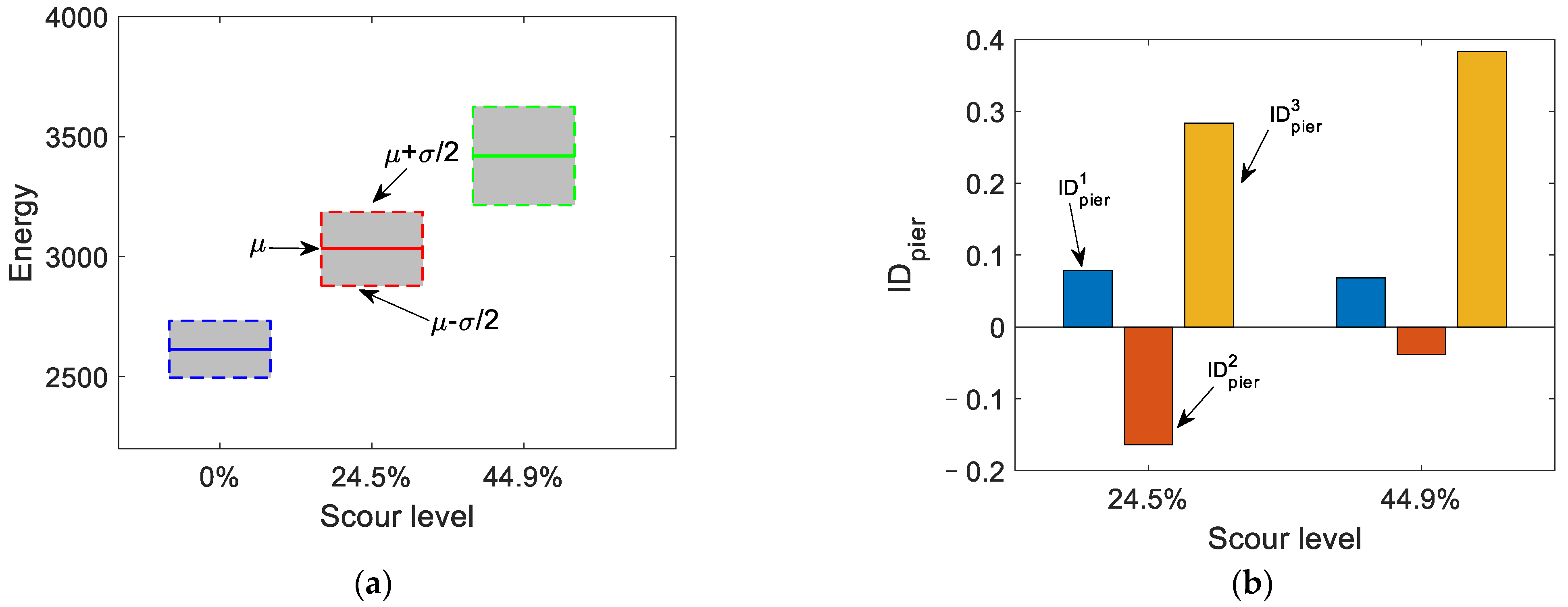
3.3. A Statistical-Wavelet-Based Scour Detection Method
3.4. Detecting Scour Location
4. Numerical Verification
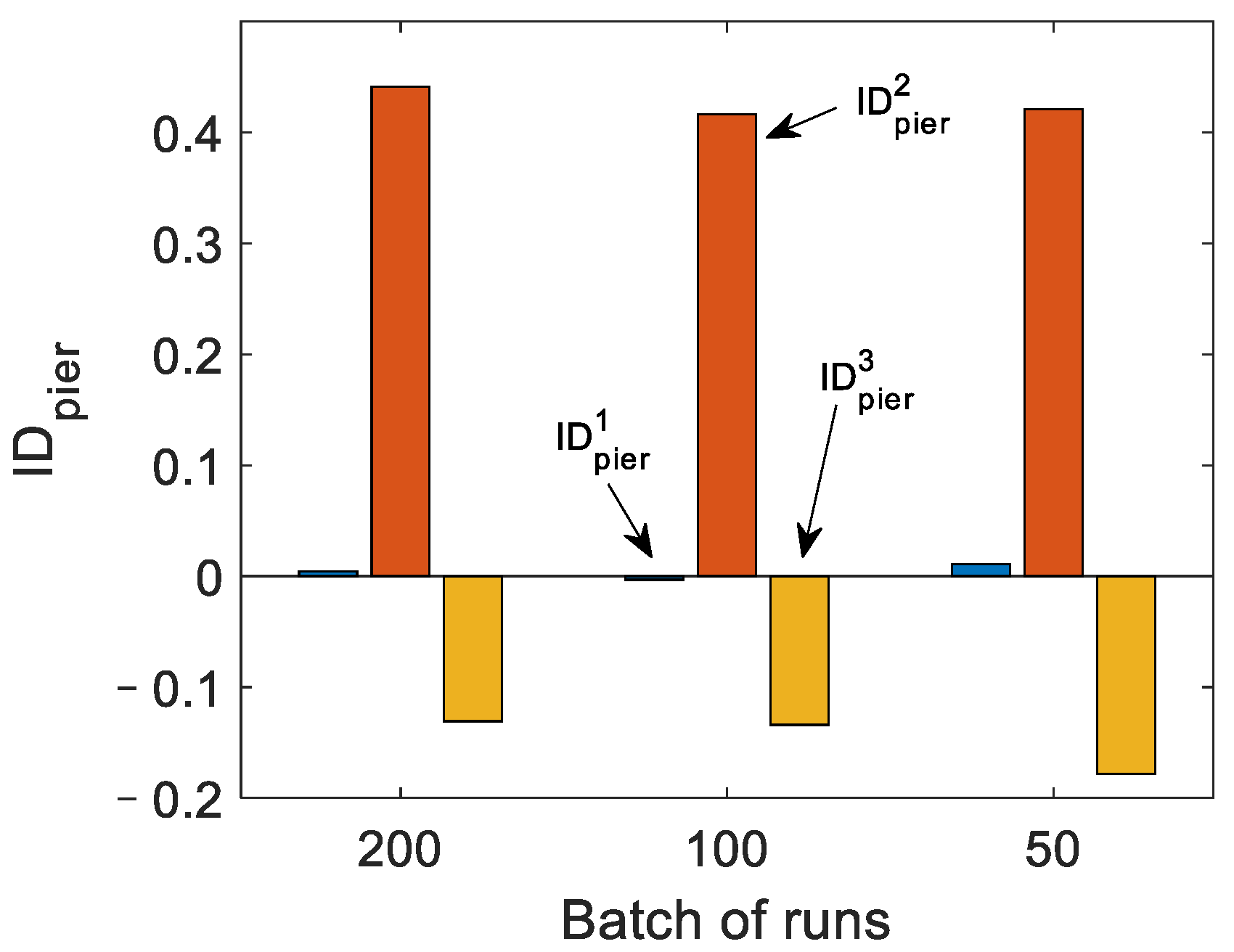
4.1. Scour Detection on Different Piers
4.2. Blind Simulation Tests
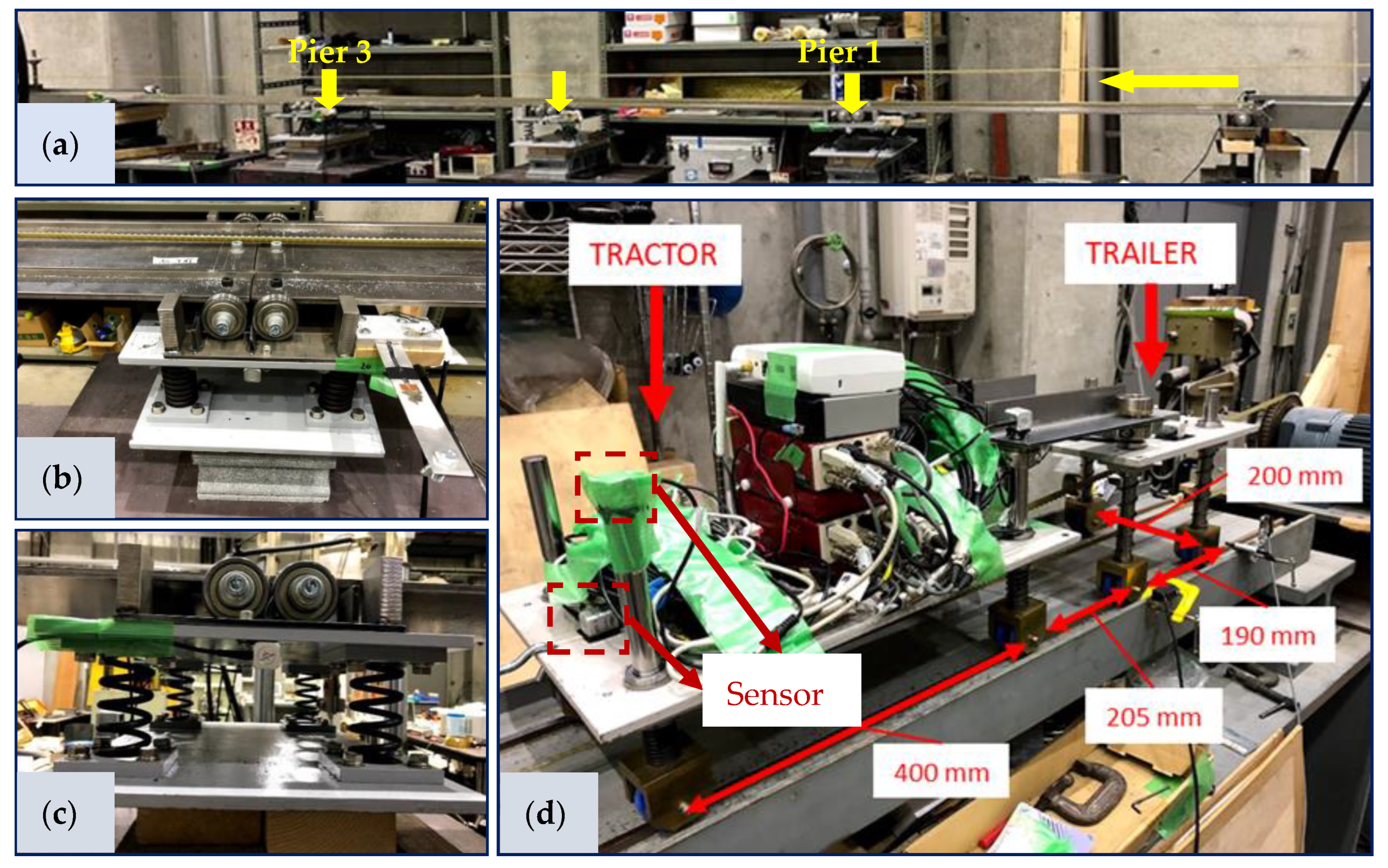
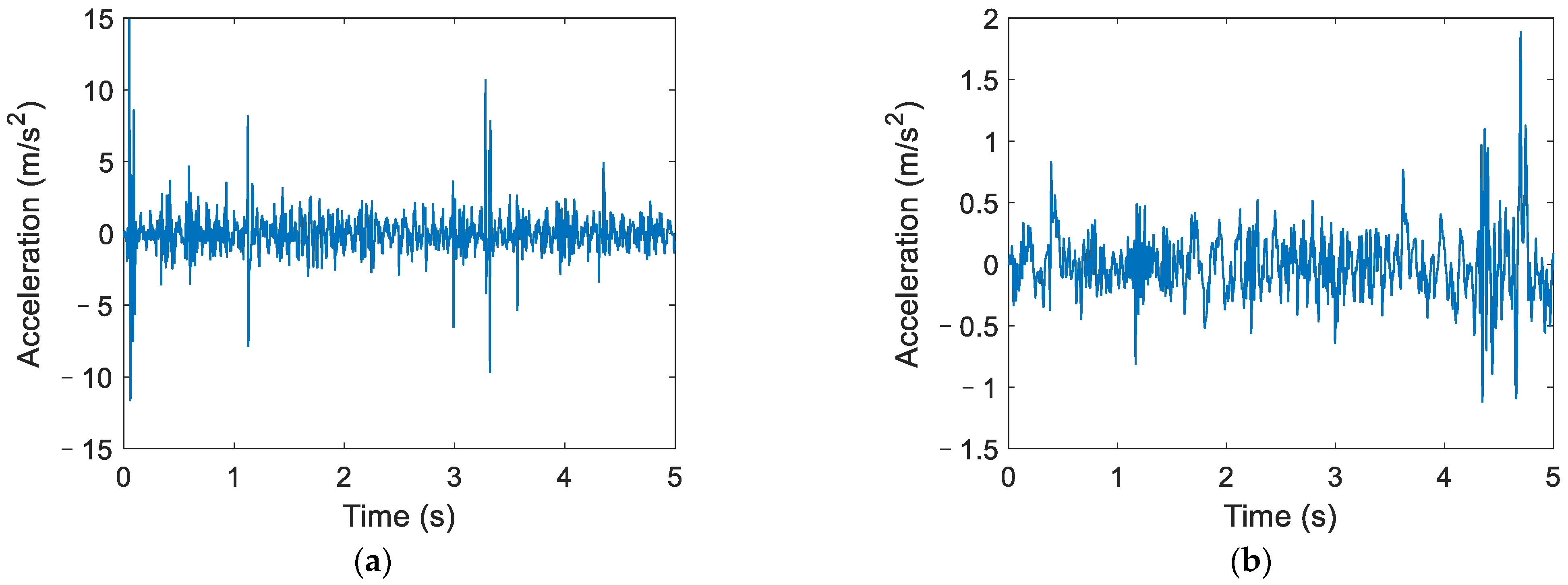
5. Lab Experiment Validation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wardhana, K.; Hadipriono, F.C. Analysis of recent bridge failures in the United States. J. Perform. Constr. Facil. 2003, 17, 144–150. [Google Scholar] [CrossRef] [Green Version]
- Briaud, J.-L.; Ting, F.; Chen, H.; Cao, Y.; Han, S.; Kwak, K. Erosion function apparatus for scour rate predictions. J. Geotech. Geoenviron. Eng. 2001, 127, 105–113. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Kim, C.-W.; OBrien, E.J.; Prendergast, L.J.; Fitzgerald, P.C.; Nakajima, S. Experimental Demonstration of a Mode Shape-Based Scour-Monitoring Method for Multispan Bridges with Shallow Foundations. J. Bridge Eng. 2020, 25, 04020050. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Prendergast, L.J.; OBrien, E. Use of mode shape ratios for pier scour monitoring in two-span integral bridges under changing environmental conditions. Can. J. Civ. Eng. 2020, 47, 962–973. [Google Scholar] [CrossRef]
- Maddison, B. Scour failure of bridges. Proc. Inst. Civ. Eng.-Forensic Eng. 2012, 165, 39–52. [Google Scholar] [CrossRef]
- Avent, R.R.; Alawady, M. Bridge scour and substructure deterioration: Case study. J. Bridge Eng. 2005, 10, 247–254. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441. [Google Scholar] [CrossRef] [Green Version]
- Foti, S.; Sabia, D. Influence of foundation scour on the dynamic response of an existing bridge. J. Bridge Eng. 2011, 16, 295–304. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Hester, D.; Gavin, K.; O’sullivan, J.J.; Vibration. An investigation of the changes in the natural frequency of a pile affected by scour. J. Sound Vib. 2013, 332, 6685–6702. [Google Scholar] [CrossRef] [Green Version]
- Klinga, J.V.; Alipour, A. Assessment of structural integrity of bridges under extreme scour conditions. Eng. Struct. 2015, 82, 55–71. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Hester, D.; Gavin, K. Development of a vehicle-bridge-soil dynamic interaction model for scour damage modelling. J. Shock Vib. 2016, 2016, 7871089. [Google Scholar] [CrossRef] [Green Version]
- Xiong, W.; Kong, B.; Tang, P.; Ye, J. Vibration-based identification for the presence of scouring of cable-stayed bridges. J. Aerosp. Eng. 2018, 31, 04018007. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.-S.; Hu, J. The state-of-the-art on framework of vibration-based structural damage identification for decision making. Appl. Sci. 2017, 7, 497. [Google Scholar] [CrossRef] [Green Version]
- Prendergast, L.J.; Gavin, K.; Hester, D. Isolating the location of scour-induced stiffness loss in bridges using local modal behaviour. J. Civ. Struct. Health Monit. 2017, 7, 483–503. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; McCrum, D.P.; Prendergast, L.J.; OBrien, E.J.; Fitzgerald, P.C.; Kim, C.-W. Laboratory investigation of a bridge scour monitoring method using decentralized modal analysis. Struct. Health Monit. 2021, 20, 3327–3341. [Google Scholar] [CrossRef]
- Mosavi, A.A.; Seracino, R.; Rizkalla, S. Effect of temperature on daily modal variability of a steel-concrete composite bridge. J. Bridge Eng. 2012, 17, 979–983. [Google Scholar] [CrossRef]
- Kim, J.-T.; Ryu, Y.-S.; Cho, H.-M.; Stubbs, N. Damage identification in beam-type structures: Frequency-based method vs. mode-shape-based method. Eng. Struct. 2003, 25, 57–67. [Google Scholar] [CrossRef]
- Carden, E.P.; Fanning, P. Vibration based condition monitoring: A review. Struct. Health Monit. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Scozzese, F.; Ragni, L.; Tubaldi, E.; Gara, F. Modal properties variation and collapse assessment of masonry arch bridges under scour action. Eng. Struct. 2019, 199, 109665. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P. Vibration-based damage identification methods: A review and comparative study. Struct. Health Monit. 2011, 10, 83–111. [Google Scholar] [CrossRef]
- Döhler, M.; Lam, X.-B.; Mevel, L. Uncertainty quantification for modal parameters from stochastic subspace identification on multi-setup measurements. Mech. Syst. Signal Process. 2013, 36, 562–581. [Google Scholar] [CrossRef]
- Sim, S.-H.; Spencer Jr, B.; Zhang, M.; Xie, H.J.S.C.; Monitoring, H. Automated decentralized modal analysis using smart sensors. Struct. Control Health Monit. 2010, 17, 872–894. [Google Scholar] [CrossRef]
- Tan, C.; Elhattab, A.; Uddin, N. Wavelet-Entropy Approach for Detection of Bridge Damages Using Direct and Indirect Bridge Records. J. Infrastruct. Syst. 2020, 26, 04020037. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yang, J.P. State-of-the-Art Review on Modal Identification and Damage Detection of Bridges by Moving Test Vehicles. Int. J. Struct. Stab. Dyn. 2018, 18, 1850025. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C. Scour effect on bridge and vehicle responses under bridge–vehicle–wave interaction. J. Bridge Eng. 2016, 21, 04015083. [Google Scholar] [CrossRef]
- Fitzgerald, P.C.; Malekjafarian, A.; Cantero, D.; OBrien, E.J.; Prendergast, L.J. Drive-by scour monitoring of railway bridges using a wavelet-based approach. Eng. Struct. 2019, 191, 1–11. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Law, S.S. Wavelet-based crack identification of bridge beam from operational deflection time history. Int. J. Solids Struct. 2006, 43, 2299–2317. [Google Scholar] [CrossRef] [Green Version]
- Shahsavari, V.; Chouinard, L.; Bastien, J. Wavelet-based analysis of mode shapes for statistical detection and localization of damage in beams using likelihood ratio test. Eng. Struct. 2017, 132, 494–507. [Google Scholar] [CrossRef]
- Rucka, M.; Wilde, K. Application of continuous wavelet transform in vibration based damage detection method for beams and plates. J. Sound Vib. 2006, 297, 536–550. [Google Scholar] [CrossRef]
- Hou, Z.; Noori, M.; St Amand, R. Wavelet-based approach for structural damage detection. J. Eng. Mech. 2000, 126, 677–683. [Google Scholar] [CrossRef] [Green Version]
- Cantero, D.; Basu, B. Railway infrastructure damage detection using wavelet transformed acceleration response of traversing vehicle. Struct. Control Health Monit. 2015, 22, 62–70. [Google Scholar] [CrossRef]
- Chatterjee, P.; OBrien, E.; Li, Y.Y.; Gonzalez, A. Wavelet domain analysis for identification of vehicle axles from bridge measurements. Comput. Struct. 2006, 84, 1792–1801. [Google Scholar] [CrossRef] [Green Version]
- Hester, D.; Gonzalez, A. A wavelet-based damage detection algorithm based on bridge acceleration response to a vehicle. Mech. Syst. Signal Process. 2012, 28, 145–166. [Google Scholar] [CrossRef] [Green Version]
- OBrien, E.J.; McCrum, D.P.; Khan, M.A.; Prendergast, L.J. Wavelet-based operating deflection shapes for locating scour-related stiffness losses in multi-span bridges. Struct. Infrastruct. Eng. 2021. [Google Scholar] [CrossRef]
- Fitzgerald, P.C.; Malekjafarian, A.; Bhowmik, B.; Prendergast, L.J.; Cahill, P.; Kim, C.W.; Hazra, B.; Pakrashi, V.; OBrien, E.J. Scour Damage Detection and Structural Health Monitoring of a Laboratory-Scaled Bridge Using a Vibration Energy Harvesting Device. Sensors 2019, 19, 2572. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cebon, D. Handbook of Vehicle-Road Interaction; Swets & Zeitlinger: Lisse, The Netherlands, 1999. [Google Scholar]
- Tan, C.; Elhattab, A.; Uddin, N. “Drive-by’’ bridge frequency-based monitoring utilizing wavelet transform. J. Civ. Struct. Health Monit. 2017, 7, 615–625. [Google Scholar] [CrossRef]
- Federal Emergency Management Agency (FEMA). Prestandard and Commentary for the Seismic Rehabilitation of Buildings; FEMA 356: Washington, DC, USA, 2000. [Google Scholar]
- Pais, A.; Kausel, E. Approximate formulas for dynamic stiffnesses of rigid foundations. Soil Dyn. Earthq. Eng. 1988, 7, 213–227. [Google Scholar] [CrossRef]
- Mylonakis, G.; Nikolaou, S.; Gazetas, G. Footings under seismic loading: Analysis and design issues with emphasis on bridge foundations. Soil Dyn. Earthq. Eng. 2006, 26, 824–853. [Google Scholar] [CrossRef]
- ISO. Mechanical Vibration—Road Surface Profiles—Reporting of Measured Data; International Organization for Standardization: Geneva, Switzerland, 1995. [Google Scholar]
- Yang, Y.B.; Yau, J.; Yao, Z.; Wu, Y. Vehicle-Bridge Interaction Dynamics: With Applications to High-Speed Railways; World Scientific: Singapore, 2004. [Google Scholar]
- Gao, R.X.; Yan, R. Selection of Base Wavelet, 1st ed.; Springer: Boston, MA, USA, 2011; pp. 165–187. [Google Scholar]
- Zhao, H.; Tan, C.; OBrien, E.J.; Uddin, N.; Zhang, B. Wavelet-Based Optimum Identification of Vehicle Axles Using Bridge Measurements. Appl. Sci. 2020, 10, 7485. [Google Scholar] [CrossRef]
- Cantero, D.; McGetrick, P.; Kim, C.W.; OBrien, E. Experimental monitoring of bridge frequency evolution during the passage of vehicles with different suspension properties. Eng. Struct. 2019, 187, 209–219. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Brien, E.J. Identification of bridge mode shapes using Short Time Frequency Domain Decomposition of the responses measured in a passing vehicle. Eng. Struct. 2014, 81, 386–397. [Google Scholar] [CrossRef] [Green Version]
- OBrien, E.J.; Fitzgerald, P.C.; Malekjafarian, A.; Sevillano, E. Bridge damage detection using vehicle axle-force information. Eng. Struct. 2017, 153, 71–80. [Google Scholar] [CrossRef]
- Prendergast, L.; Reale, C.; Gavin, K. Probabilistic examination of the change in eigenfrequencies of an offshore wind turbine under progressive scour incorporating soil spatial variability. Mar. Struct. 2018, 57, 87–104. [Google Scholar] [CrossRef] [Green Version]
- Williams, E.J.; Drexler, J.S. A non-destructive method for determining peanut pod maturity. Peanut Sci. 1981, 8, 134–141. [Google Scholar] [CrossRef]
- Simola, K.; Pulkkinen, U.J.R.E.; Safety, S. Models for non-destructive inspection data. Reliab. Eng. Syst. Saf. 1998, 60, 1–12. [Google Scholar] [CrossRef]
- Adhikary, S.; Singh, Y.; Paul, D. Modelling of soil-foundation-structure system. Soil Dyn. Earthq. Eng. 2014, 61, 13–28. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M.; Boay, M.J.M.S.; Processing, S. Indirect health monitoring of bridges using Mel-frequency cepstral coefficients and principal component analysis. Mech. Syst. Signal Process. 2019, 119, 523–546. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Parameters | Symbol | Unit | Value |
|---|---|---|---|
| Body mass | 14,300 | ||
| Wheel mass | 700 | ||
| Suspension stiffness | 200 | ||
| Suspension damping | 100 | ||
| Wheel stiffness | 2500 | ||
| Wheel damping | 10 |
| Bridge Property | Symbol | Unit | Value |
|---|---|---|---|
| Span length | |||
| Beam depth | |||
| Beam second moment of area | |||
| Beam mass per unit length | |||
| Beam modulus of elasticity | |||
| Pier mass | |||
| Pier stiffness | |||
| Stiffness provided by foundation |
| Property | Unit | Value |
|---|---|---|
| Span length | 1.3 | |
| Span width | 300 | |
| Span depth | 8.07 | |
| Second moment of area (Rectangular cross section) | 1.314 × 10−8 | |
| Young’s Modulus | 2.05 × 1011 | |
| Density | 7850 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Zhao, H.; Tan, C.; OBrien, E.J.; Fitzgerald, P.C.; Kim, C.-W. Laboratory Investigation on Detecting Bridge Scour Using the Indirect Measurement from a Passing Vehicle. Remote Sens. 2022, 14, 3106. https://doi.org/10.3390/rs14133106
Zhang B, Zhao H, Tan C, OBrien EJ, Fitzgerald PC, Kim C-W. Laboratory Investigation on Detecting Bridge Scour Using the Indirect Measurement from a Passing Vehicle. Remote Sensing. 2022; 14(13):3106. https://doi.org/10.3390/rs14133106
Chicago/Turabian StyleZhang, Bin, Hua Zhao, Chengjun Tan, Eugene J. OBrien, Paul C. Fitzgerald, and Chul-Woo Kim. 2022. "Laboratory Investigation on Detecting Bridge Scour Using the Indirect Measurement from a Passing Vehicle" Remote Sensing 14, no. 13: 3106. https://doi.org/10.3390/rs14133106