
Near Real-Time Change Detection System Using Sentinel-2 and Machine Learning: A Test for Mexican and Colombian Forests

 , ,
, ,  , , ,
, , , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Near Real-Time (NRT) Change Detection System
- (i)
- A configuration file was generated to write all parameters required for the processing chain, such as login information for the Copernicus hub account, path to the Sen2cor installation for cloud masking, input and output paths for the processing, etc. Further details can be found at [43].
- (ii)
- The system monitored the ESA Copernicus Open Data Hub to find any new Sentinel-2 data acquisitions over the area of interest on a regular basis.
- (iii)
- Sentinel-2 imagery was acquired by an optical sensor, so the data were affected by atmospheric effects (i.e., clouds, cloud shadows, aerosols) and topographic effects (i.e., illumination angle, shadows from terrain). Masking out the pixels affected by noise and clouds was the key to reducing the omission errors in the change detection, especially for pan-tropical regions with frequent cloud cover and steep terrain. Therefore, we used a robust cloud and cloud shadow masking algorithm by combining the cloud mask from Sen2Cor (version 2.5.5) [47], to process the top of atmosphere (TOA) L1C image to the bottom of atmosphere (BOA) reflectance at level L2A [48], with the cloud mask generated by F-mask [49] and buffered by a user-defined pixel number. Temporal gaps in the time series corresponded to areas where the cloud cover was ≥ 80%. Therefore, those images were not processed due to the likelihood of generating false positives in the change detection.
- (iv)
- A cloud-free reference composite was generated using all available cloud-masked images from the composite-building time window for the selected area. (v) As soon as a new Sentinel-2 image was acquired and added to the Copernicus Open Access Hub, it was downloaded and processed using a pre-trained machine learning model to detect vegetation change compared to the reference image composite. The NRT element operated on the same principles as the time series data, whereby a chronologically ordered image stack, consisting of a cloud-free reference image and a newly acquired image, was processed for change detection. (vi) The last available cloud-free pixel before the current acquisition data was then used to detect change against the baseline composite. A binary mask was updated after every new image was ingested into the system, so if a pixel was identified as change, it would be eliminated from the next iteration of change detection. (vii) If visual interpretation was required for validating the resultant change maps, a set of sampling points was automatically generated in shapefile format. When a forest cover change was detected, it was archived and then disseminated in a user-friendly interactive format to an authorized server and/or registered mobile devices for further action.
2.2. NRT Change Detection System Performance Evaluation
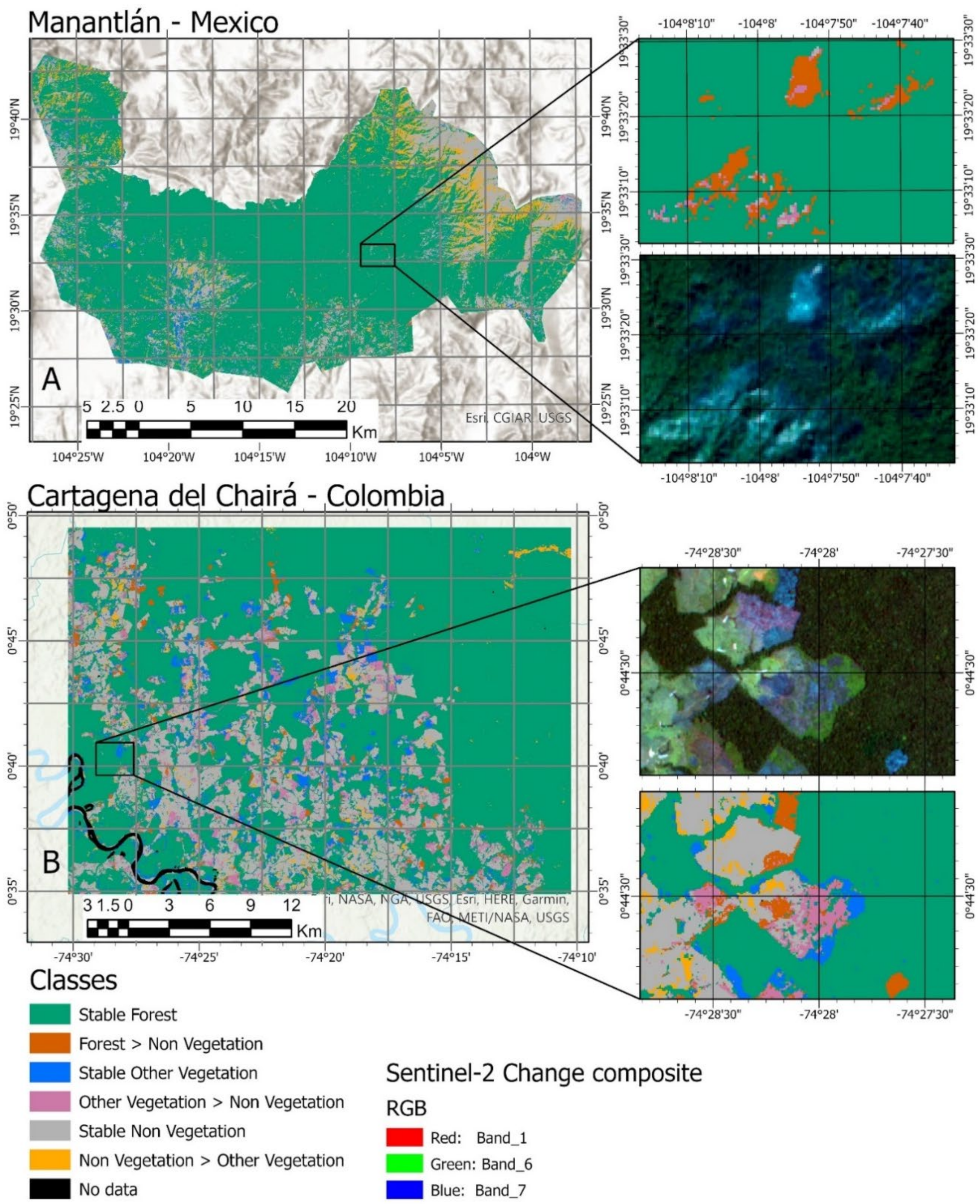
2.2.1. Study Regions
2.2.2. Change Detection Algorithm
2.2.3. Targeted Change Classes and Training Data Collecting Protocol
2.2.4. Validation Strategy and Accuracy Assessment
3. Results
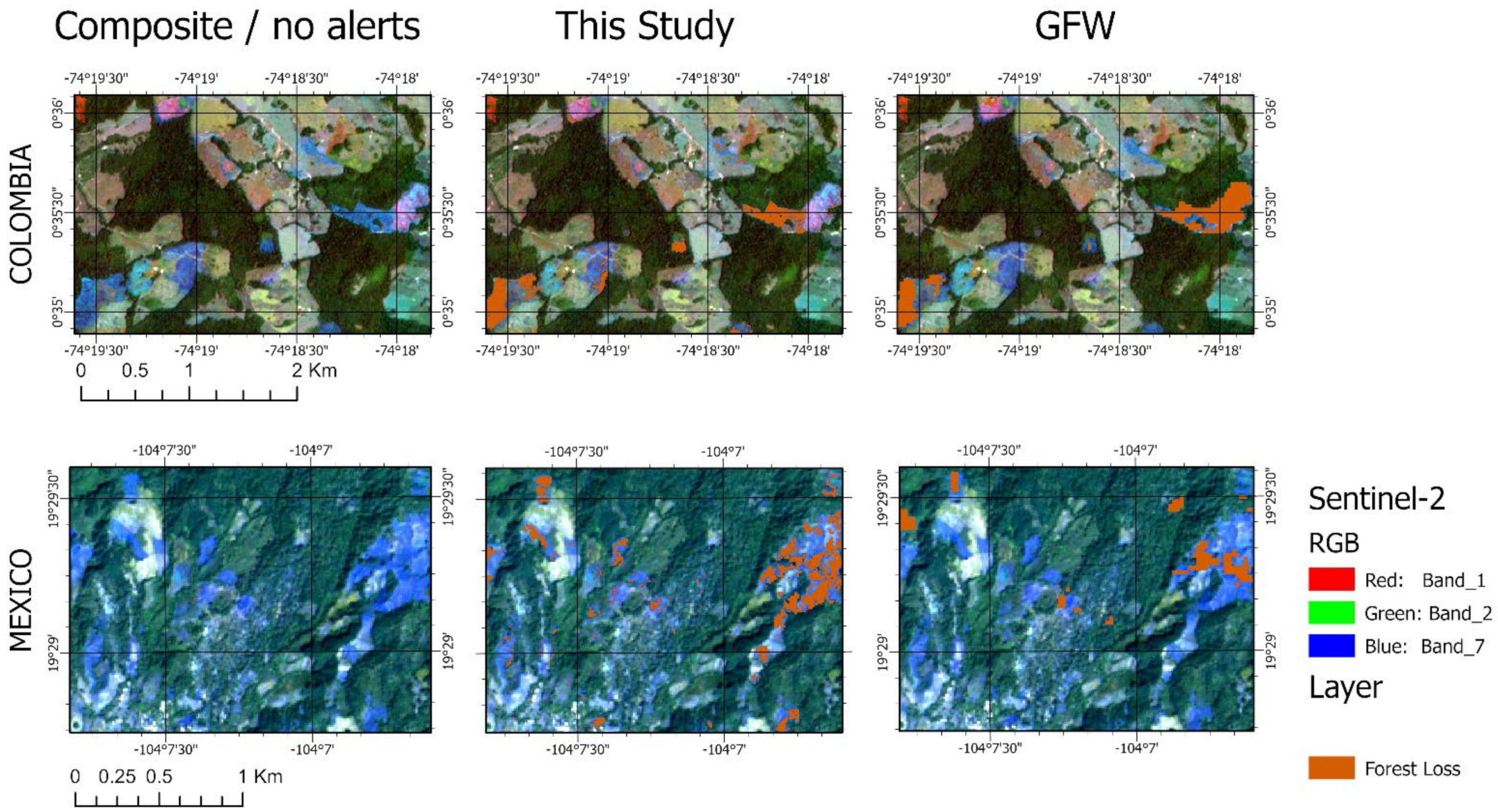
3.1. Forest Change Alerts
3.2. Change Detection Accuracy
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
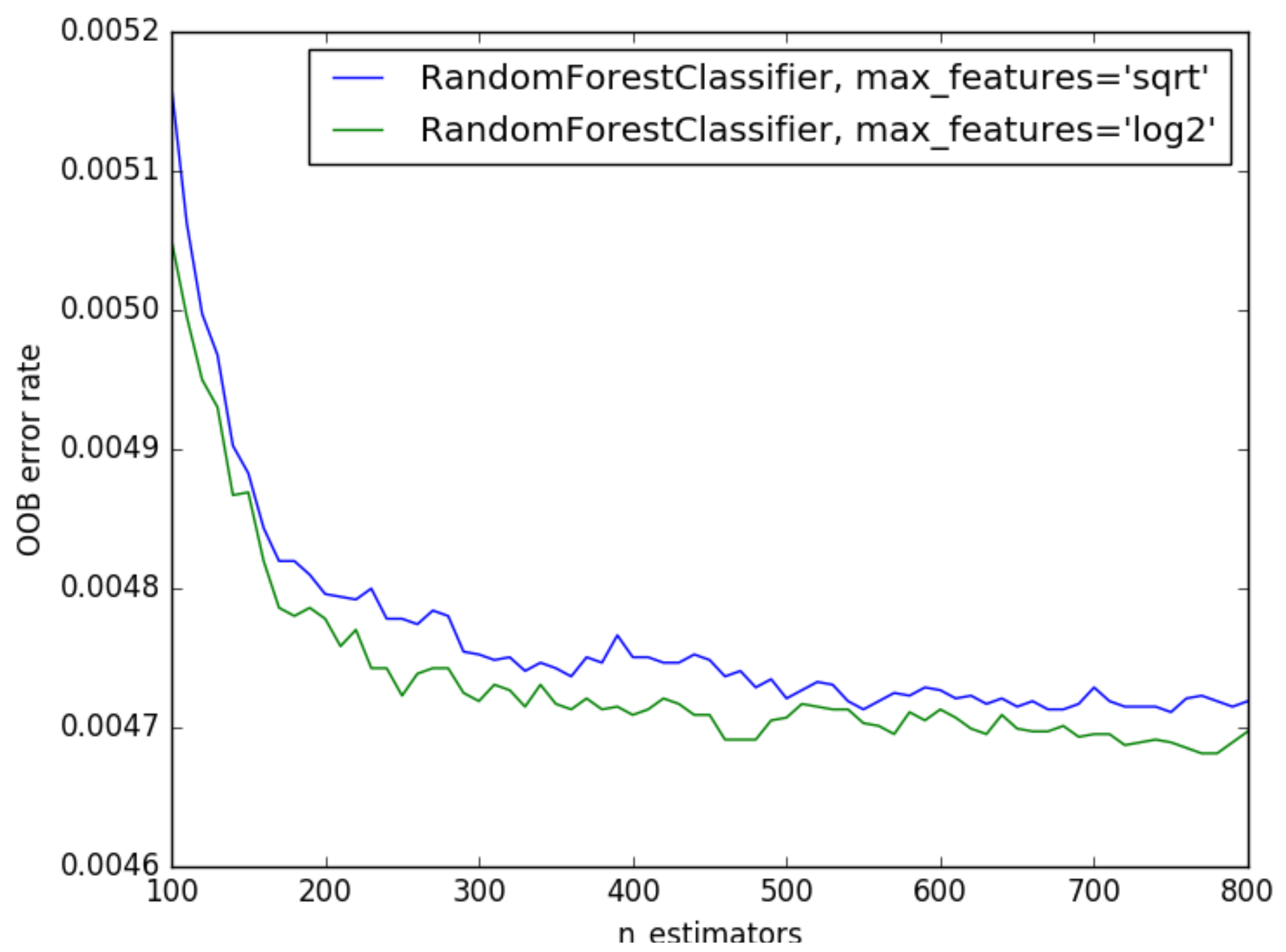
Appendix A.1. Model Calibration Results


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | Scene Model | Change Model |
|---|---|---|
| Number of trees | 500 | 500 |
| Split criterion | gini | gini |
| Maximum tree depth | None–increased until pure | 10 |
| Maximum features | square root | square root |
| Minimum leaf samples | 5 | 5 |
| Minimum split samples | 2 | 2 |


Appendix A.2. Validation
| Classes | Expected User’s Accuracy | |
|---|---|---|
| 1 | Stable Forest | 0.9 |
| 2 | Forest > Other Vegetation | 0.7 |
| 3 | Forest > Non-vegetation | 0.7 |
| 4 | Stable Other Vegetation | 0.8 |
| 5 | Other Vegetation > Non-vegetation | 0.7 |
| 6 | Non-vegetation > Forest | 0.7 |
| 7 | Stable Non-vegetation | 0.9 |
| 8 | Non-vegetation > Other Vegetation | 0.7 |
| 9 | Forest > Other Vegetation | 0.7 |
| 10 | Water Bodies | 0.9 |
References
- Putz, F.E.; Blate, G.M.; Redford, K.H.; Fimbel, R.; Robinson, J. Tropical Forest Management and Conservation of Biodiversity: An Overview. Conserv. Biol. 2001, 15, 7–20. [Google Scholar] [CrossRef] [Green Version]
- Mitchard, E.T. The Tropical Forest Carbon Cycle and Climate Change. Nature 2018, 559, 527–534. [Google Scholar] [CrossRef] [PubMed]
- FAO. The State of the World’s Forests 2018: Forest Pathways to Sustainable Development; FAO: Rome, Italy, 2018. [Google Scholar]
- FAO; UNEP. The State of the World’s Forests 2020: Forests, Biodiversity and People; FAO: Rome, Italy, 2020. [Google Scholar]
- Mitchell, A.L.; Rosenqvist, A.; Mora, B. Current Remote Sensing Approaches to Monitoring Forest Degradation in Support of Countries Measurement, Reporting and Verification (MRV) Systems for REDD+. Carbon Balance Manag. 2017, 12, 9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crutzen, P.J.; Ehlers, E.; Krafft, T. Earth System Science in the Anthropocene; Springer: Berlin/Heidelberg, Germany, 2006; pp. 13–18. [Google Scholar]
- Díaz, S.; Settele, J.; Brondízio, E.; Ngo, H.; Guèze, M.; Agard, J.; Arneth, A.; Balvanera, P.; Brauman, K.; Butchart, S. Summary for Policymakers of the Global Assessment Report on Biodiversity and Ecosystem Services of the Intergovernmental Science-Policy Platform on Biodiversity and Ecosystem Services; IPBES: Bonn, Germany, 2020. [Google Scholar]
- UN. The Sustainable Development Goals Report 2019; UN: New York, NY, USA, 2019. [Google Scholar]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [Green Version]
- Shimada, M.; Itoh, T.; Motooka, T.; Watanabe, M.; Shiraishi, T.; Thapa, R.; Lucas, R. New Global Forest/Non-Forest Maps from ALOS PALSAR Data (2007–2010). Remote Sens. Environ. 2014, 155, 13–31. [Google Scholar] [CrossRef]
- Rodríguez-Veiga, P.; Barbosa-Herrera, A.P.; Barreto-Silva, J.S.; Bispo, P.C.; Cabrera, E.; Capachero, C.; Galindo, G.; Gou, Y.; Moreno, L.M.; Louis, V. Mapping the Spatial Distribution of Colombia’s Forest Aboveground Biomass Using SAR and Optical Data. In Proceedings of the 10 Joint Workshop “Multidisciplinary Remote Sensing for Environmental Monitoring”, Kyoto, Japan, 12–14 March 2019. [Google Scholar]
- Santoro, M.; Cartus, O.; Carvalhais, N.; Rozendaal, D.; Avitabilie, V.; Araza, A.; de Bruin, S.; Herold, M.; Quegan, S.; Rodríguez Veiga, P. The Global Forest Above-Ground Biomass Pool for 2010 Estimated from High-Resolution Satellite Observations. Earth Syst. Sci. Data Discuss. 2021, 13, 3927–3950. [Google Scholar] [CrossRef]
- Brink, A.B.; Eva, H.D. Monitoring 25 Years of Land Cover Change Dynamics in Africa: A Sample Based Remote Sensing Approach. Appl. Geogr. 2009, 29, 501–512. [Google Scholar] [CrossRef]
- Petit, C.; Lambin, E.F. Integration of Multi-Source Remote Sensing Data for Land Cover Change Detection. Int. J. Geogr. Inf. Sci. 2001, 15, 785–803. [Google Scholar] [CrossRef]
- Nomura, K.; Mitchard, E.T. More than Meets the Eye: Using Sentinel-2 to Map Small Plantations in Complex Forest Landscapes. Remote Sens. 2018, 10, 1693. [Google Scholar] [CrossRef] [Green Version]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid Tropical Forest Disturbance Alerts Using Landsat Data. Environ. Res. Lett. 2016, 11, 034008. [Google Scholar] [CrossRef]
- Martone, M.; Rizzoli, P.; Wecklich, C.; González, C.; Bueso-Bello, J.-L.; Valdo, P.; Schulze, D.; Zink, M.; Krieger, G.; Moreira, A. The Global Forest/Non-Forest Map from TanDEM-X Interferometric SAR Data. Remote Sens. Environ. 2018, 205, 352–373. [Google Scholar] [CrossRef]
- Vargas, C.; Montalban, J.; Leon, A.A. Early Warning Tropical Forest Loss Alerts in Peru Using Landsat. Environ. Res. Commun. 2019, 1, 121002. [Google Scholar] [CrossRef]
- Wheeler, D.; Hammer, D.; Kraft, R.; Steele, A. Satellite-Based Forest Clearing Detection in the Brazilian Amazon: FORMA, DETER, and PRODES; World Resources Institute: Washington, DC, USA, 2014. [Google Scholar]
- Perbet, P.; Fortin, M.; Ville, A.; Béland, M. Near Real-Time Deforestation Detection in Malaysia and Indonesia Using Change Vector Analysis with Three Sensors. Int. J. Remote Sens. 2019, 40, 7439–7458. [Google Scholar] [CrossRef]
- Reiche, J.; Mullissa, A.; Slagter, B.; Gou, Y.; Tsendbazar, N.-E.; Odongo-Braun, C.; Vollrath, A.; Weisse, M.J.; Stolle, F.; Pickens, A. Forest Disturbance Alerts for the Congo Basin Using Sentinel-1. Environ. Res. Lett. 2021, 16, 024005. [Google Scholar] [CrossRef]
- De Groeve, T.; Kugler, Z.; Brakenridge, G.R. Near Real Time Flood Alerting for the Global Disaster Alert and Coordination System. In Proceedings of the ISCRAM 2007, Delft, The Netherlands, 13–16 May 2007; pp. 33–39. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.109.5899&rep=rep1&type=pdf (accessed on 20 March 2020).
- Bessis, J.-L.; Bequignon, J.; Mahmood, A. The International Charter “Space and Major Disasters” Initiative. Acta Astronaut. 2004, 54, 183–190. [Google Scholar] [CrossRef]
- Ross, K.; Brown, M.E.; Verdin, J.P.; Underwood, L. Review of FEWS NET Biophysical Monitoring Requirements. Environ. Res. Lett. 2009, 4, 024009. [Google Scholar] [CrossRef] [Green Version]
- Sothe, C.; de Almeida, C.M.; Liesenberg, V.; Schimalski, M.B. Evaluating Sentinel-2 and Landsat-8 Data to Map Sucessional Forest Stages in a Subtropical Forest in Southern Brazil. Remote Sens. 2017, 9, 838. [Google Scholar] [CrossRef] [Green Version]
- Pulvirenti, L.; Squicciarino, G.; Fiori, E.; Fiorucci, P.; Ferraris, L.; Negro, D.; Gollini, A.; Severino, M.; Puca, S. An Automatic Processing Chain for Near Real-Time Mapping of Burned Forest Areas Using Sentinel-2 Data. Remote Sens. 2020, 12, 674. [Google Scholar] [CrossRef] [Green Version]
- Reiche, J.; Verhoeven, R.; Verbesselt, J.; Hamunyela, E.; Wielaard, N.; Herold, M. Characterizing Tropical Forest Cover Loss Using Dense Sentinel-1 Data and Active Fire Alerts. Remote Sens. 2018, 10, 777. [Google Scholar] [CrossRef] [Green Version]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Remedios, J.; Balzter, H.; Burrows, J.; Eves, S.; Johnson, M.; Lavender, S.; Monks, P.; O’Neill, A.; Shepherd, A. Earth Observation: A Revolutionary Leap into the Future. Astron. Geophys. 2012, 53, 3–16. [Google Scholar] [CrossRef] [Green Version]
- Tewkesbury, A.P.; Comber, A.J.; Tate, N.J.; Lamb, A.; Fisher, P.F. A Critical Synthesis of Remotely Sensed Optical Image Change Detection Techniques. Remote Sens. Environ. 2015, 160, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Cios, K.; Kurgan, L. Advanced Techniques in Knowledge Discovery and Data Mining; Springer: London, UK, 2005. [Google Scholar]
- Moser, G.; Zerubia, J. Mathematical Models for Remote Sensing Image Processing; Springer: Berlin/Heidelberg, Germany, 2018; ISBN 3-319-66330-5. [Google Scholar]
- Wang, X.; Kruger, U.; Irwin, G.W. Process Monitoring Approach Using Fast Moving Window PCA. Ind. Eng. Chem. Res. 2005, 44, 5691–5702. [Google Scholar] [CrossRef]
- Brown, J. Choosing the Right Number of Components or Factors in PCA and EFA. JALT Test. Eval. SIG Newsl. 2009, 13, 19–23. [Google Scholar]
- Achour, S.; Chikr Elmezouar, M.; Taleb, N.; Kpalma, K.; Ronsin, J. A PCA-PD Fusion Method for Change Detection in Remote Sensing Multi Temporal Images. Geocarto Int. 2020, 37, 196–213. [Google Scholar] [CrossRef]
- Nielsen, A.A.; Conradsen, K. Multivariate Alteration Detection (MAD) in Multispectral, Bi-Temporal Image Data: A New Approach to Change Detection Studies; Technical University of Denmark: Lyngby, Denmark, 1997. [Google Scholar]
- DeVries, B.; Decuyper, M.; Verbesselt, J.; Zeileis, A.; Herold, M.; Joseph, S. Tracking Disturbance-Regrowth Dynamics in Tropical Forests Using Structural Change Detection and Landsat Time Series. Remote Sens. Environ. 2015, 169, 320–334. [Google Scholar] [CrossRef]
- Herold, M.; Román-Cuesta, R.M.; Mollicone, D.; Hirata, Y.; Van Laake, P.; Asner, G.P.; Souza, C.; Skutsch, M.; Avitabile, V.; MacDicken, K. Options for Monitoring and Estimating Historical Carbon Emissions from Forest Degradation in the Context of REDD+. Carbon Balance Manag. 2011, 6, 13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pratihast, A.K.; DeVries, B.; Avitabile, V.; De Bruin, S.; Herold, M.; Bergsma, A. Design and Implementation of an Interactive Web-Based near Real-Time Forest Monitoring System. PLoS ONE 2016, 11, e0150935. [Google Scholar] [CrossRef] [Green Version]
- Verbesselt, J.; Hyndman, R.; Newnham, G.; Culvenor, D. Detecting Trend and Seasonal Changes in Satellite Image Time Series. Remote Sens. Environ. 2010, 114, 106–115. [Google Scholar] [CrossRef]
- Masiliūnas, D.; Tsendbazar, N.-E.; Herold, M.; Verbesselt, J. BFAST Lite: A Lightweight Break Detection Method for Time Series Analysis. Remote Sens. 2021, 13, 3308. [Google Scholar] [CrossRef]
- Congalton, R.G.; Gu, J.; Yadav, K.; Thenkabail, P.; Ozdogan, M. Global Land Cover Mapping: A Review and Uncertainty Analysis. Remote Sens. 2014, 6, 12070–12093. [Google Scholar] [CrossRef] [Green Version]
- Roberts, J.; Baltzer, H.; Gou, Y.; Louis, V.; Robb, C. PYEO: Automated Satellite Imagery Processing, version v0.7; Zenodo: Meyrin, Switzerland, 2020; Available online: https://zenodo.org/record/3689674#.YfWMwqbP3ik and https://github.com/clcr/pyeo/tree/cd1daa9f5f37a2d2b3b314a63e4284dcccbfc075/pyeo/apps/change_detection; (accessed on 1 September 2021). [Google Scholar]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Chazdon, R.L. Beyond Deforestation: Restoring Forests and Ecosystem Services on Degraded Lands. Science 2008, 320, 1458–1460. [Google Scholar] [CrossRef] [Green Version]
- Chazdon, R.L.; Guariguata, M.R. Natural Regeneration as a Tool for Large-scale Forest Restoration in the Tropics: Prospects and Challenges. Biotropica 2016, 48, 716–730. [Google Scholar] [CrossRef]
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2 GitHub repository. Available online: https://github.com/c-core-labs/sen2cor (accessed on 1 February 2020).
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2. In Proceedings of the SPIE Remote Sensing, Warsaw, Poland, 4 October 2017; Volume 10427, p. 1042704. [Google Scholar]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and Expansion of the Fmask Algorithm: Cloud, Cloud Shadow, and Snow Detection for Landsats 4–7, 8, and Sentinel 2 Images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- SIMEC; CONANP. Sierra de Manantlán; Gobierno de Mexico; 2020. Available online: https://simec.conanp.gob.mx/ficha.php?anp=59®=6 (accessed on 11 November 2021).
- Chapela, F. Estado de Los Bosques de Mexico; Consejo Civil Mexicano Para la Silvicultura Sostenible (CCMSS): Mexico City, Mexico, 2012. [Google Scholar]
- Santiago-Pérez, A.L.; Jardel-Peláez, E.J.; Cuevas-Guzmán, R.; Huerta-Martínez, F.M. Vegetación de Bordes En Un Bosque Mesófilo de Montaña Del Occidente de México. Boletín de la Sociedad Botánica de México 2009, 85, 31–49. Available online: http://www.scielo.org.mx/scielo.php?script=sci_arttext&pid=S0366-21282009000200004 (accessed on 10 October 2021). [CrossRef]
- Marshall, E.; Newton, A.C. Non-Timber Forest Products in the Community of El Terrero, Sierra de Manantlán Biosphere Reserve, Mexico: Is Their Use Sustainable? Econ. Bot. 2003, 57, 262–278. [Google Scholar] [CrossRef]
- Secretaría de Medio Ambiente y Desarrollo Territorial. Datos Históricos de Incendios Forestales; Secretaría de Medio Ambiente y Desarrollo Territorial: Guadalajara, Mexico, 2022. [Google Scholar]
- Cassell, B.A. Fire History of the Sierra de Manantlán Biosphere Reserve in Western Mexico; University of Washington: Seattle, WA, USA, 2012; ISBN 1-267-69621-4. [Google Scholar]
- Davalos, L.M.; Bejarano, A.C.; Hall, M.A.; Correa, H.L.; Corthals, A.; Espejo, O.J. Forests and Drugs: Coca-Driven Deforestation in Tropical Biodiversity Hotspots. Environ. Sci. Technol. 2011, 45, 1219–1227. [Google Scholar] [CrossRef]
- Martínez, G. Construyendo Agenda 21 Para El Departamento de Putumayo: Una Construcción Colectiva Para El Desarrollo Sostenible de La Amazonia Colombiana; Instituto Amazónico de Investigaciones Científicas SINCHI: Bogota, Colombia, 2007; ISBN 958-8317-27-4. [Google Scholar]
- Duivenvoorden, J.F.; Lips, J.M. A Land-Ecological Study of Soils, Vegetation, and Plant Diversity in Colombian Amazonia; Tropenbos International: Ede, The Netherlands, 1995; Available online: https://www.tropenbos.org/resources/publications/a+land-ecological+study+of+soils,+vegetation,+and+plant+diversity+in+colombian+amazonia (accessed on 10 October 2021)ISBN 90-5113-024-4.
- García, U.G.M.; García, C.M.H.; Rondón, J.M.R.; Castellanos, H.O.A. Monitoreo de Los Bosques y Otras Coberturas de La Amazonia Colombiana, a Escala 1: 100.000 Cambios Multitemporales En El Período 2002 Al 2007; Instituto Amazónico de Investigaciones Científicas SINCHI: Bogota, Colombia, 2011; ISBN 958-8317-70-3. [Google Scholar]
- IDEAM. Quinto Boletín de Alertas Tempranas de Deforestacion: Segundo Semestre; IDEAM: Bogotá, Colombia, 2015. [Google Scholar]
- Cabrera, E.; Galindo, G.; González, J.; Vergara, L.; Forero, C.; Cubillos, A.; Espejo, J.; Rubiano, J.; Corredor, X.; Hurtado, L. Colombian Forest Monitoring System: Assessing Deforestation in an Environmental Complex Country. In Forest Degradation Around the World; Books on Demand: Norderstedt, Germany, 2019. [Google Scholar]
- IDEAM. Resultados Del Monitoreo de La Deforestación 2017; IDEAM: Bogotá, Colombia, 2018. [Google Scholar]
- Armenteras, D.; Rodríguez, N. Dinámicas y Causas de Deforestación En Bosques de Latino América: Una Revisión Desde 1990. Colomb. For. 2014, 17, 233–246. [Google Scholar] [CrossRef] [Green Version]
- Coca-Castro, A.; Reymondin, L.; Bellfield, H.; Hyman, G. Land Use Status and Trends in Amazonia. A Report for the Amazonia Security Agenda Project (January, 2013); Centro Interacional de Agricultura Tropical: Cali, Colombia, 2013. [Google Scholar]
- Hoffmann, C.; Márquez, J.R.G.; Krueger, T. A Local Perspective on Drivers and Measures to Slow Deforestation in the Andean-Amazonian Foothills of Colombia. Land Use Policy 2018, 77, 379–391. [Google Scholar] [CrossRef]
- SIATAC. Puntos de Calor Por Región (Histórico). Cartagena Del Chairá 2018; Catalogo Geonetwork-SIATAC: Bogotá, Colombia, 2021. [Google Scholar]
- Sutton, O. Introduction to k Nearest Neighbour Classification and Condensed Nearest Neighbour Data Reduction. Univ. Lect. Univ. Leic. 2012, 1–10. Available online: https://staff.fmi.uvt.ro/~daniela.zaharie/dm2018/ro/TemeProiecte/Biblio/kNN/CondensedNearestNeighbor.pdf (accessed on 2 February 2020).
- García-Laencina, P.J.; Sancho-Gómez, J.-L.; Figueiras-Vidal, A.R.; Verleysen, M. K Nearest Neighbours with Mutual Information for Simultaneous Classification and Missing Data Imputation. Neurocomputing 2009, 72, 1483–1493. [Google Scholar] [CrossRef]
- Feng, S.; Zhao, J.; Liu, T.; Zhang, H.; Zhang, Z.; Guo, X. Crop Type Identification and Mapping Using Machine Learning Algorithms and Sentinel-2 Time Series Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3295–3306. [Google Scholar] [CrossRef]
- Breiman, L. Statistical Modeling: The Two Cultures (with Comments and a Rejoinder by the Author). Stat. Sci. 2001, 16, 199–231. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Wadsworth Inc.: Monterey, CA, USA, 1984. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning; Springer Series in Statistics; Springer: New York, NY, USA, 2001. [Google Scholar]
- Robb, C. Geospatial Learn 0.3. Zenodo. 2017. Available online: https://github.com/Ciaran1981/geospatial-learn (accessed on 20 November 2019).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Louppe, G.; Prettenhofer, P.; Weiss, R. Scikit-Learn: Machine Learning in Python. arXiv 2012, arXiv:1201.0490. [Google Scholar]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good Practices for Estimating Area and Assessing Accuracy of Land Change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Stehman, S.V.; Woodcock, C.E. Making Better Use of Accuracy Data in Land Change Studies: Estimating Accuracy and Area and Quantifying Uncertainty Using Stratified Estimation. Remote Sens. Environ. 2013, 129, 122–131. [Google Scholar] [CrossRef]
- Planet Team. Planet Team. Planet Application Program Interface. In Space for Life on Earth; Planet Team: San Francisco, CA, USA, 2017. [Google Scholar]






| Classes | Definition |
|---|---|
| Stable Forest | Forest that remains forest between two observations. |
| Forest > Other Vegetation | Forest that changes to other vegetation. This class is difficult to detect during a short period of analysis. It may happen when deforested areas are in a recovery process but are still not within the definition of forest, or areas that replaced by other type of vegetation not identified as forest (i.e., bracken, agriculture, palm plantations). |
| Forest > Non-vegetation | Forest that changes to non-vegetated areas, i.e., deforestation. |
| Stable Other Vegetation | Areas that are covered by vegetation other than forest on both observation dates. |
| Other Vegetation > Forest | Other vegetation that changes into forest, i.e., areas of tree planting, afforestation or reforestation. |
| Other Vegetation > Non-vegetation | Other vegetation that changes into non-vegetated areas, i.e., change in crops, seasonal shrubs. |
| Stable Non-vegetation | Areas that are not covered by vegetation in either observation, i.e., bare soils, urban areas. |
| Non-vegetation > Forest | Non-vegetated areas that change into forest, i.e., areas of tree planting, afforestation or reforestation. This class might occur in a longer time series (i.e., > 10 years) [45,46]. |
| Non-vegetation > Other Vegetation | Non-vegetated areas that change into other vegetation, i.e., crop growth, bracken growth, succession. |
| Classes | Training Sampling Points | Validation Polygons | |||
|---|---|---|---|---|---|
| Colombia | Mexico | Colombia | Mexico | ||
| 1 | Stable Forest | 74,486 | 87,527 | 181 | 123 |
| 2 | Forest > Non-vegetation | 3839 | 8033 | 100 | 50 |
| 3 | Stable Other Vegetation | 6933 | 25,214 | 30 | 20 |
| 4 | Other Vegetation > Non-vegetation | 1439 | 14,455 | 40 | 25 |
| 5 | Stable Non-vegetation | 8294 | 22,039 | 45 | 13 |
| 6 | Non-vegetation > Other Vegetation | 730 | 11,047 | 40 | 8 |
| TOTAL | 99,047 | 168,315 | 446 | 239 | |
| Classes | PA (%) | UA (%) | OA (%) | ||||
|---|---|---|---|---|---|---|---|
| Colombia | Mexico | Colombia | Mexico | Colombia | Mexico | ||
| 1 | Stable Forest | 94 | 95 | 96 | 100 | 95 | 97 |
| 2 | Forest > Non-vegetation | 75 | 88 | 99 | 97 | 87 | 93 |
| 3 | Stable Other Vegetation | 90 | 95 | 68 | 67 | 79 | 81 |
| 4 | Other Vegetation > Non-vegetation | 95 | 74 | 59 | 77 | 77 | 76 |
| 5 | Stable Non-vegetation | 93 | 86 | 88 | 40 | 90 | 63 |
| 6 | Non-vegetation > Other Vegetation | 75 | 42 | 100 | 100 | 88 | 71 |
| TOTAL | 87.0 | 87 | 80 | 85 | 80 | 86 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pacheco-Pascagaza, A.M.; Gou, Y.; Louis, V.; Roberts, J.F.; Rodríguez-Veiga, P.; da Conceição Bispo, P.; Espírito-Santo, F.D.B.; Robb, C.; Upton, C.; Galindo, G.; et al. Near Real-Time Change Detection System Using Sentinel-2 and Machine Learning: A Test for Mexican and Colombian Forests. Remote Sens. 2022, 14, 707. https://doi.org/10.3390/rs14030707
Pacheco-Pascagaza AM, Gou Y, Louis V, Roberts JF, Rodríguez-Veiga P, da Conceição Bispo P, Espírito-Santo FDB, Robb C, Upton C, Galindo G, et al. Near Real-Time Change Detection System Using Sentinel-2 and Machine Learning: A Test for Mexican and Colombian Forests. Remote Sensing. 2022; 14(3):707. https://doi.org/10.3390/rs14030707
Chicago/Turabian StylePacheco-Pascagaza, Ana María, Yaqing Gou, Valentin Louis, John F. Roberts, Pedro Rodríguez-Veiga, Polyanna da Conceição Bispo, Fernando D. B. Espírito-Santo, Ciaran Robb, Caroline Upton, Gustavo Galindo, and et al. 2022. "Near Real-Time Change Detection System Using Sentinel-2 and Machine Learning: A Test for Mexican and Colombian Forests" Remote Sensing 14, no. 3: 707. https://doi.org/10.3390/rs14030707