1. Introduction
In volcanic areas, where it is often difficult to access the most critical zones to carry out direct surveys, digital photogrammetry techniques have remarkable potential for following the evolution of volcanic activity and monitoring deformation processes [
1,
2,
3,
4]. Aerial digital photogrammetry can acquire dense 3D data over large areas, thus it is suitable to observe rapid evolving and widespread phenomena. Digital photogrammetry processing is based on the application of matching procedures between overlapping images using autocorrelation algorithms capable of working at subpixel level [
5]. Direct georeferencing or, at least, the use of a pre-established network of GCPs (Ground Control Points) has reduced the need for ground survey operations [
6]. The outputs of digital photogrammetry are multi-temporal Digital Orthophotos and Digital Elevation Models (DEMs), that allow implementing a quantitative comparative analysis. The systematic acquisition of airborne photogrammetric datasets can be adopted for long-term volcano monitoring and hazard assessment [
1,
2]. During volcanic crisis, oblique digital images, frequently acquired by helicopter, can be processed, for example with the scientific tool Orthoview [
7] that uses a straightforward photogrammetric approach to generate digital orthophotos. The processing, through photogrammetric software, of digital images taken from helicopter, light aircraft or ground can also be used to extract DEMs from points identified in multiple photos. The comparison of successive DEMs can be used to model the evolving morphology of a growing dome, as done for the 2004–2008 eruption of Mount St. Helens volcano, the 2009 eruption of Redoubt volcano, the active lava dome at Volcán de Colima, Mexico and the dome at the Soufrière Hills volcano on Montserrat from 1 August 2005 to 20 April 2007 [
3,
4,
8,
9]. Oblique stereo-pair time-lapse imagery acquired on the ground can also be processed by combining close-range photogrammetry and traditional stereo-matching software or by using a software based on structure-from-motion, to extract DEMs for analyzing active lava flows on Kilauea volcano, Hawaii and Mount Etna, Sicily [
10].
In order to evaluate the temporal evolution of a lava flow field and estimate its effusion rate, thus enabling to perform analysis on the eruptive mechanism, a multi-temporal analysis is required. In the past, such analyses have been performed only on long-duration lava flows mainly using photogrammetric data, topographic maps and historical reports [
11,
12,
13,
14].
An almost continuous survey can be obtained during emergency phases by processing images constantly acquired from a ground network of sensors, to implement a quasi-real-time monitoring for supporting civil protection actions.
Previous works (discussed below) demonstrate that the routine and automatic application of photogrammetric techniques to process ground based images offers promising perspectives for operational applications, such as monitoring and early warning systems of natural disasters including volcanic eruptions, landslides, or analysis of glacier motion. Most of the previous applications were developed in support of portable video stations. More specifically, the approaches developed for landslides and glaciers monitoring are devoted to the extraction of single features displacement and velocity fields.
A real-time mapping system was previously developed to extract ortho-images by rectifying digital landscape images acquired by a single ground-based digital camera. The rectification was carried out by matching between the common skyline edge that appears in the image and in a reference one generated from a DEM. The mapping system was tested during a survey of the Mayon Volcano, Philippines [
15]. Oblique photogrammetric techniques have also been adopted to process visible and thermal images acquired on the ground with portable cameras. A minimum of four 3D targets, having known positions, on each visible image and a DEM of the investigated area are required to extract camera orientation. Thermal images are taken at the same location of the visible ones to allow the estimation of a suitable projective transformation for obtaining georeferenced maps used for further analysis of lava-flow development this method was tested during the 2004–2005 eruption of Mount Etna, Sicily [
16]. A similar approach has been applied to map Etna’s active flows on 27–29 September 2004 by moving a single pre-calibrated camera around the lava flow-fronts. A thermal image sequence was processed to analyze the flow of lava down a distal channel in order to assess flux and rheological properties [
17]. A very-long-range terrestrial laser scanner was applied on active lavas at Mount Etna on 5–12 June 2009 [
18]. To facilitate visualization and interpretation of the laser data, visible and thermal images were also acquired and processed as described in [
16]. Visible imageries, acquired at the Mammoth Mountain (CA) fumarole area, were processed using the structure-from-motion photogrammetric method to create a DEM for orthorectifying and georeferencing thermal infrared imageries with the final aim of analyzing three-dimensional maps of apparent surface temperature and radiant hydrothermal heat flux [
19].
A low-cost methodology to monitor the displacement of continuously active landslides from ground-based optical images was tested on the Super-Sauze landslide (South French Alps) over the period 2008–2009 [
20]. The data were processed with a cross-correlation algorithm applied to the images in the acquisition geometry and the calculated 2D displacement field was orthorectified with a back projection technique using a high resolution DEM. The performance of the technique was assessed using differential GPS (Global Positioning System) surveys as reference.
Terrestrial photogrammetric surveys using monoscopic oblique images have been conducted to monitor the motion at the tongue of Jakobshavn Isbræ glacier in Greenland and at the front of the Glaciar San Rafael in the Northern Patagonia Icefield to evaluate their spatial-temporal velocity fields [
21,
22,
23]. An open-source package to evaluate velocity field by tracking features between image pairs has been developed and tested on the Engabreen glacier in northern Norway [
24].
This work presents a dedicated approach we have developed to orthorectify images acquired from the permanent ground NEtwork of Thermal and Visible Sensors located on Mt. Etna (Etna_NETVIS) with the aim of quantifying the temporal evolution of lava flows. The presented approach can easily be applied to similar ground networks for monitoring active volcanoes and natural disasters.
The work starts by analyzing the present configuration of Etna ground network of cameras with a view to its possible implementation to guarantee a complete observation of the summit area and of the slopes potentially inundated by lava flows. In particular, it investigates a number of locations for additional observation sites to be set up during emergency phases, thus supporting a rapid assessment of the most favorable locations.
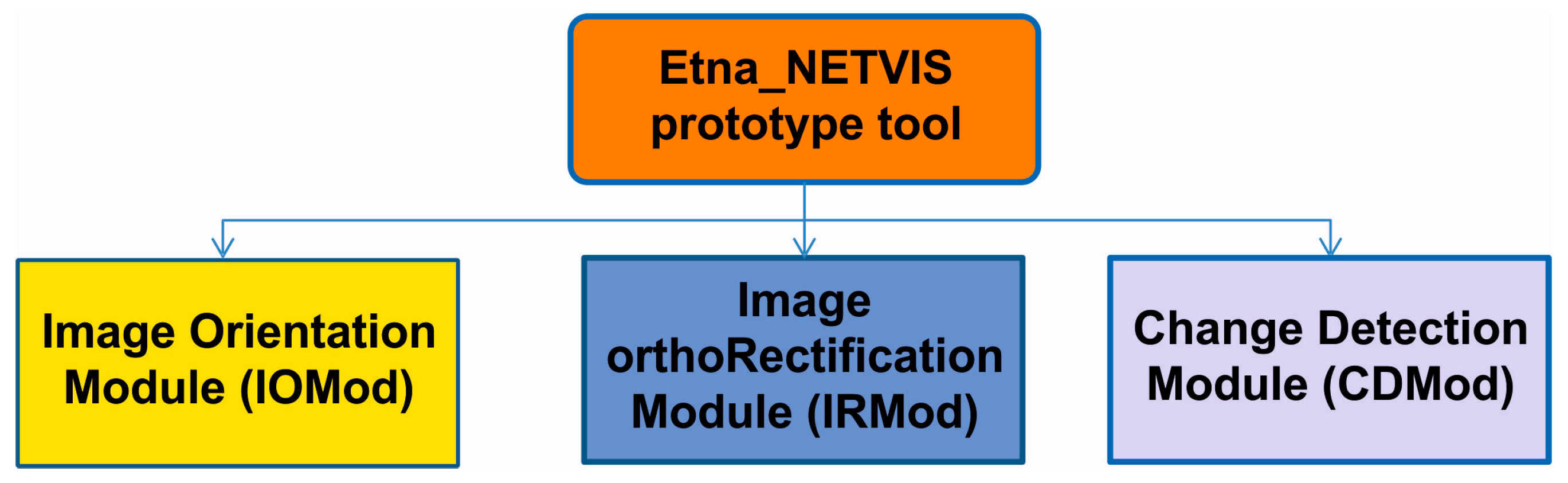
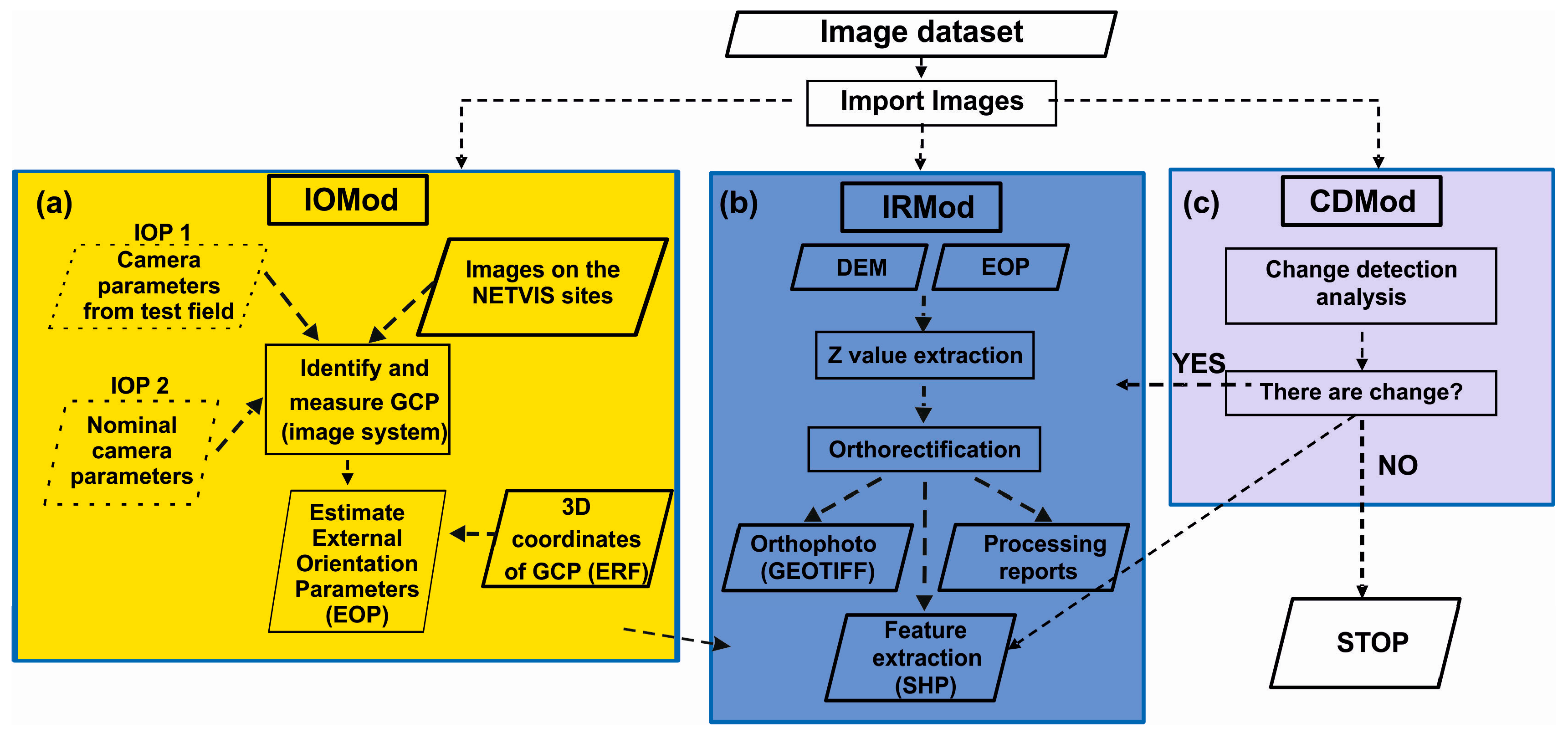
The main goal of the work is to develop an image-processing tool for extracting a coherent multi-temporal dataset of orthophotos from ground-acquired images, provided that a reference DEM is available. In this way, the Etna_NETVIS is implemented for mapping purposes and not only for surveillance functions. The processed datasets can be used for the extraction of 2D features such as the evolutions maps of an active lava flow, useful for rapidly estimating its direction and rate of advancement. The developed tool comprises three different modules: the Image Orientation Module (IOMod), the Image orthoRectification Module (IRMod) and the Change Detection Module (CDMod). The processing tool was initially evaluated on two ad-hoc test fields established at INGV (Istituto Nazionale di Geofisica e Vulcanologia) facility edifice in Nicolosi (CT) and at La Montagnola observation site. A number of images have been acquired during the two tests to evaluate the spatial and radiometric accuracy of the sensors and estimate the internal and external orientation parameters of the camera. Two more tests were performed using datasets acquired from Monte Cagliato thermal camera of Etna_NETVIS during the eruptive events on 12 and 29 August 2011 from the New South East Crater that were characterized by both explosive and effusive activity.
The 12 August 2011 eruptive event was previously analyzed to compare radiance estimates from data acquired with a long-range ground-based thermal camera and from SEVIRI (Spinning Enhanced Visible and InfraRed Imager) satellite images [
25]. Images acquired by the thermal camera located at Monte Cagliato have been processed to generate georeferenced temperature maps, corrected for atmospheric effect and view angle. Images georeferentiation was performed through the approach presented in [
16,
17] that is by determining the camera orientation using measured GPS coordinates of the camera and by aligning a representative image with a projection of the 2005 Etna digital elevation model as viewed from the Monte Cagliato site.
2. The Etna_NETVIS Network
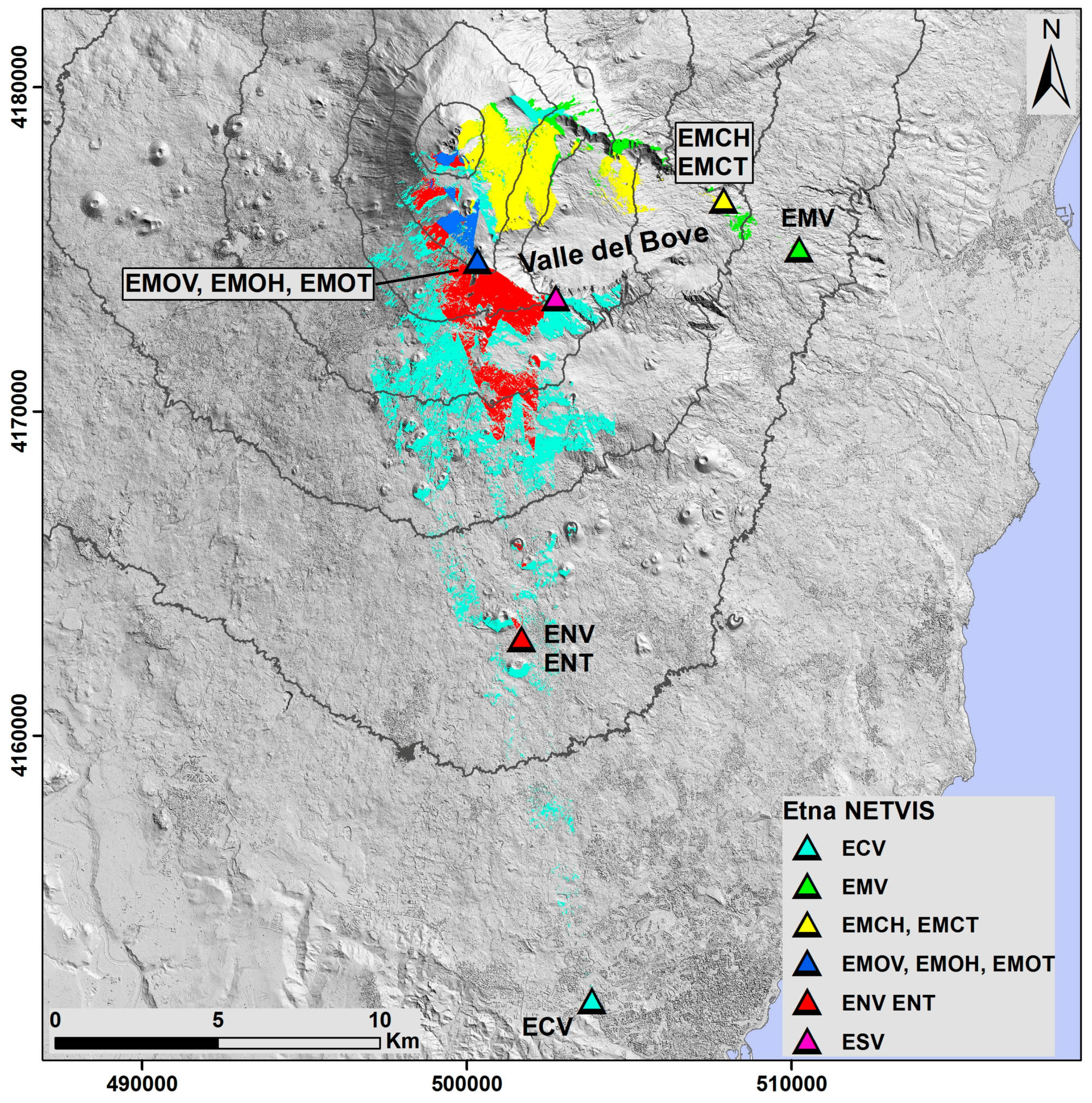
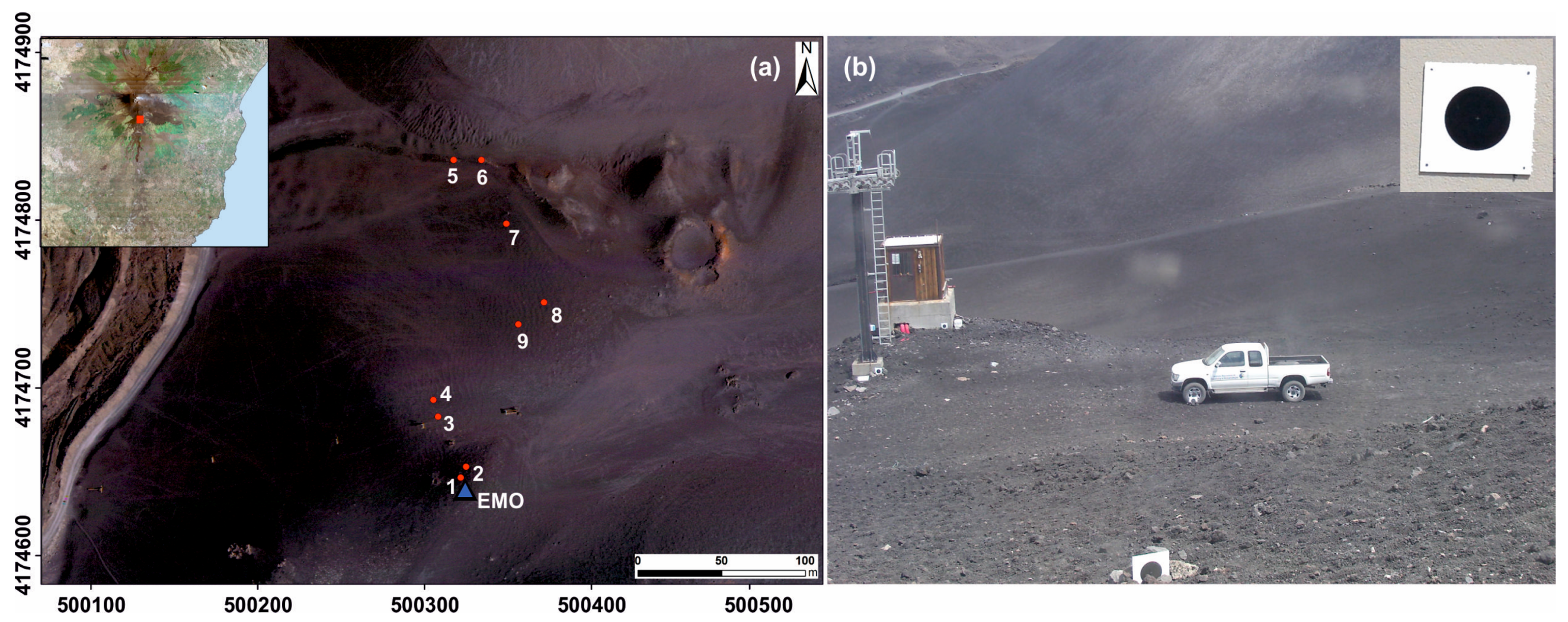
The permanent ground NEtwork of Thermal and VIsible Sensors of Mt. Etna (Etna_NETVIS) comprises visible and thermal cameras located at different sites on Etna’s southern and eastern flanks. The network, initially with CANON VC-C4R Visible (V) and FLIR A40 Thermal (T) cameras installed at Etna Cuad (ECV), Etna Milo (EMV), Etna Montagnola (EMOV and EMOT), Etna Nicolosi (ENV and ENT) sites, has recently been updated (since 2011) by adding High resolution (H) sensors (VIVOTEK IP8172 and FLIR A320) at Etna Monte Cagliato (EMCT and EMCH) and Etna Montagnola (EMOH) sites (
Figure 1).
An analysis of the current network configuration, focusing on the view geometry and on the sensor performances, was done to evaluate the observation capability of the different stations along the volcano slopes and on the summit area. This analysis was made in a 3D virtual environment using a DEM of Etna volcano and taking into account the sensor positions and orientations. Currently, the ground coverage of all sensors is limited to the summit portion of the volcano and to the high south and southeast flanks (
Figure 1). The present network is effectively focused on monitoring the volcanic plume, generally produced by the summit craters.
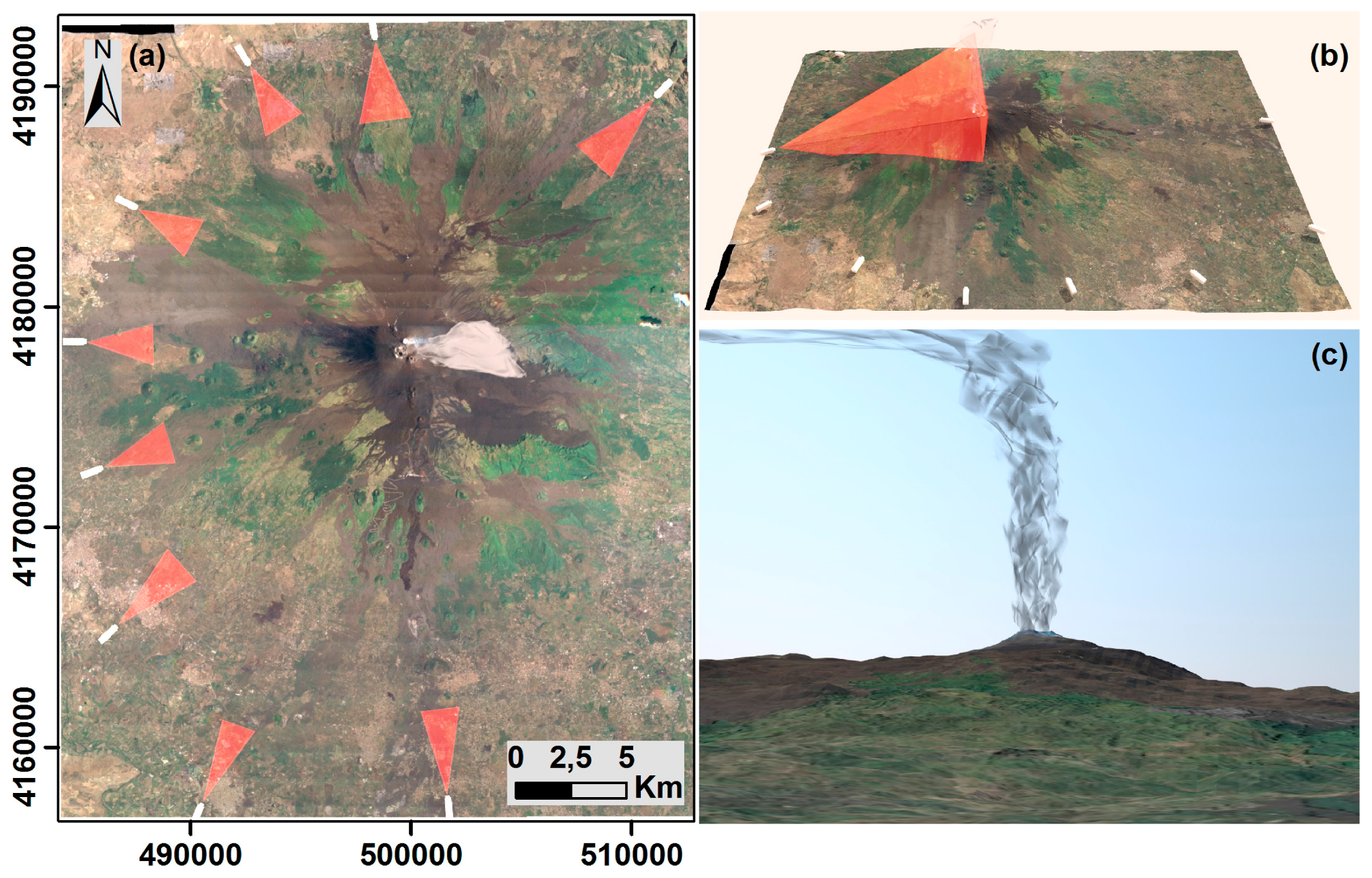
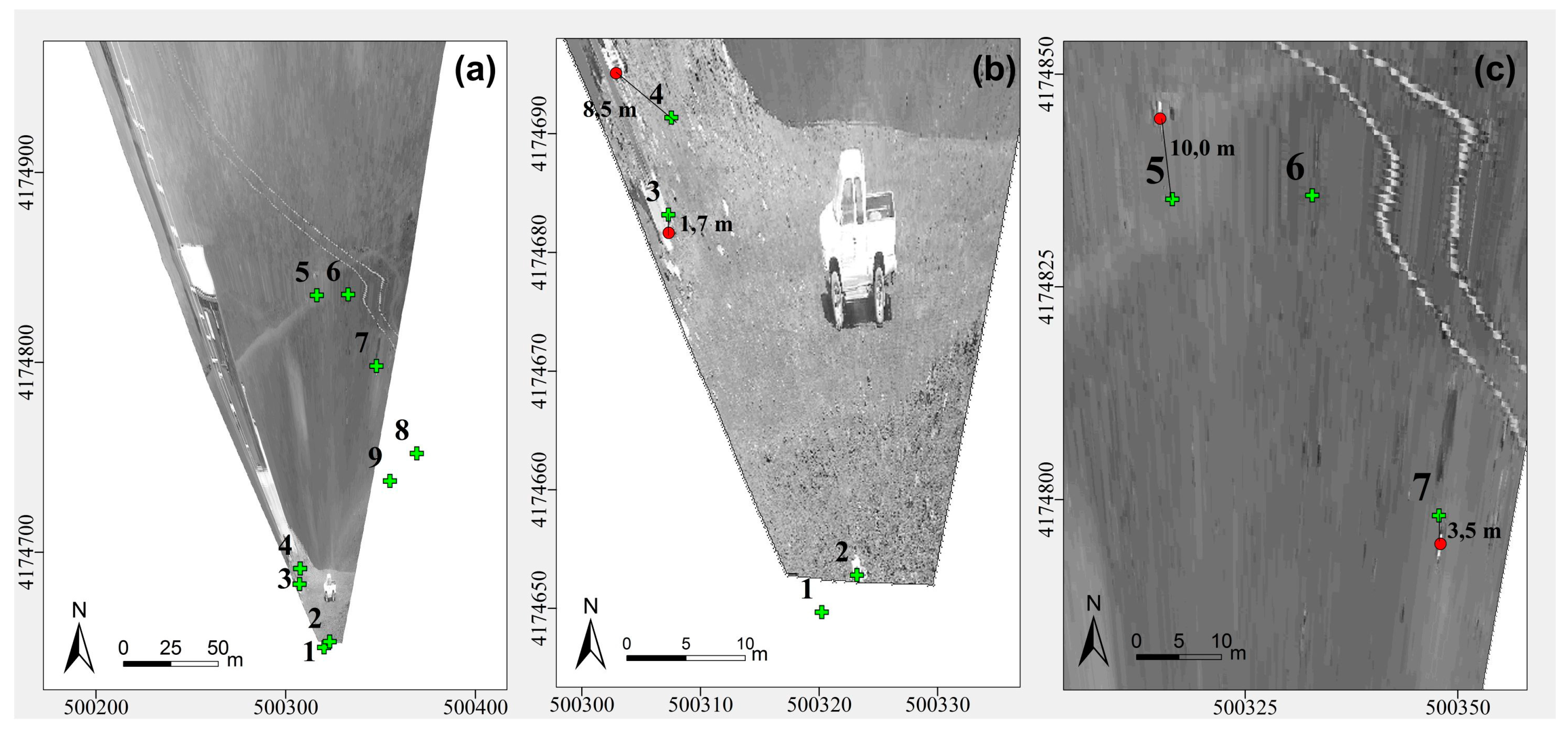
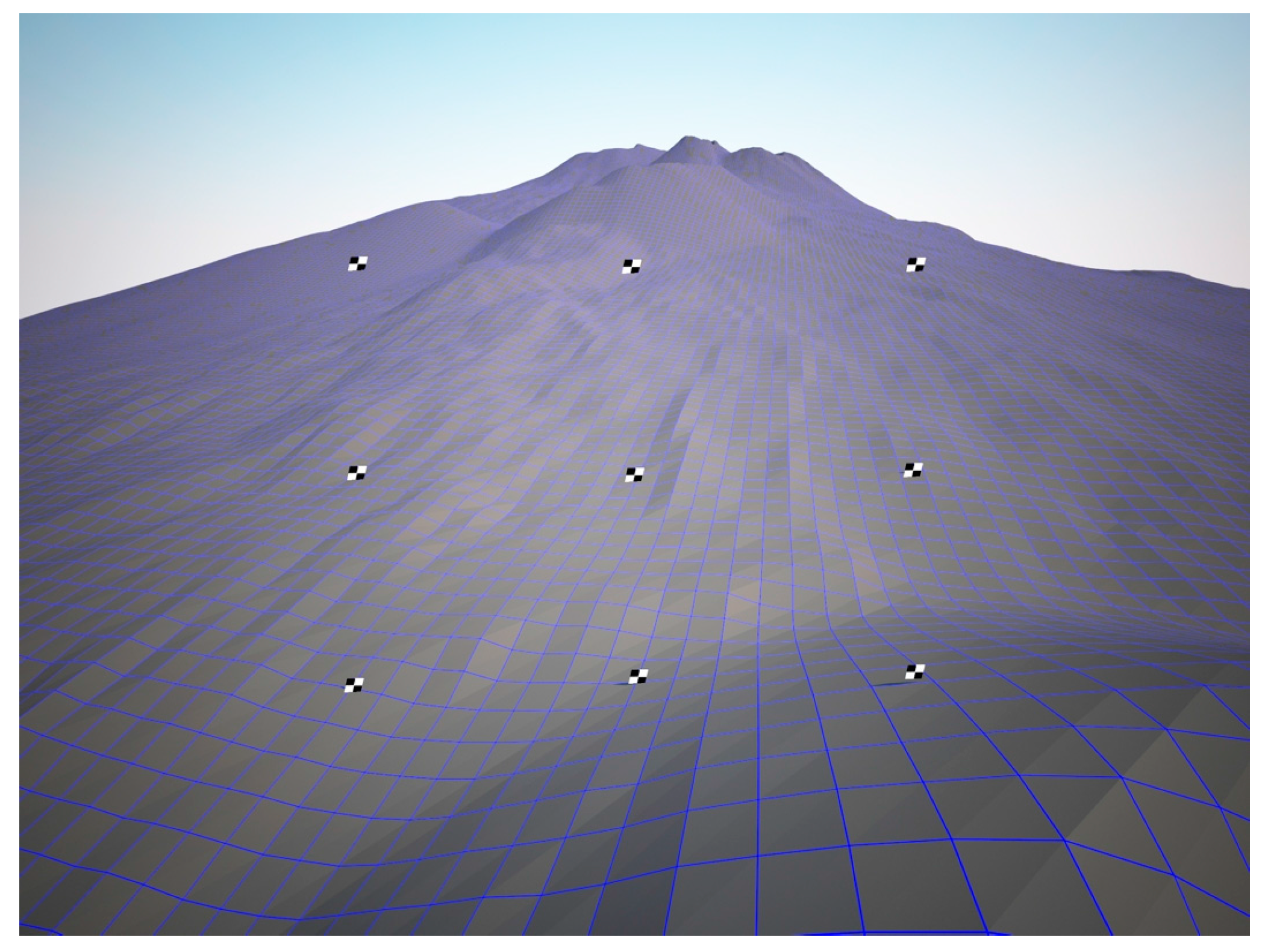
A possible implementation of the network was then investigated to improve the ground coverage and resolution. In order to optimize the configuration, for monitoring both the explosive and effusive activity, a simulation of an augmented network was performed by setting up a number of observation sites distributed evenly around the volcano base (
Figure 2a). During emergency phases, mobile stations can be installed in the identified sites to improve the observation capability close to the area in which the eruption is expected to develop. The mobile stations can be equipped with high-resolution sensors such as the VIVOTEK IP8172 and FLIR A320 cameras investigated here. This wide configuration would allow monitoring the volcanic plume development, including its proximal dispersion (through visible sensors), and detecting and pinpointing fissure and vent openings at the onset of effusive episodes (using both thermal and visible sensors). Simulated views of the areas visible from the proposed new observation sites were also made (
Figure 2b,c).
The technical specifications of the cameras operating today in Etna_NETVIS, including sensor dimension, pixel size, focal length and Horizontal and Vertical field of view (HFOV and VFOV), have been checked to evaluate their observation performance (
Table 1). The variations of pixel size on the ground and of the maximum values of the Horizontal Field of View have been evaluated, for both the thermal and visible cameras, with respect to the distance (
Figure 3).
Two of the sensors belonging to Etna_NETVIS have been investigated in the field. The VIVOTEK IP8172 visible camera, currently installed at La Montagnola and Monte Cagliato sites (EMO and EMC in
Figure 1), was used to conduct experimental tests on two test fields at the INGV facility in Nicolosi (CT) and at La Montagnola site (EN and EMO in
Figure 1). The first test was to calibrate the sensor, and the second one was to estimate its external orientation when mounted on the observation site. The FLIR A320 thermal camera installed at Monte Cagliato (EMCT in
Figure 1) was used to test the entire developed tool during operational phases, namely during eruptive episodes.
Since 2011, Etna eruptive activity has involved only the summit craters and in particular the New South-East Crater (NSEC). Eruptive events occurred at NSEC have been characterized by high lava fountains and the formation of lava flow fields inside the Valle del Bove (situated on Etna’s east flank,
Figure 1). This portion of the volcano is partially observable from the visible camera located at Schiena dell’Asino (ESV) and more widely observable from the visible and thermal cameras installed at Monte Cagliato (EMCH and EMCT). It is therefore important to evaluate the capability of the two sensors installed at Monte Cagliato (VIVOTEK IP8172 and FLIR A320) to monitor eruptive phenomena at the summit area or in its proximity.
Figure 3 enables assessing the ground pixel size and the field of view of each sensor in terms of its linear distance from a designed area. In particular, the linear distance between Monte Cagliato site and the New South-East Crater is about 8 km. At this distance, the minimum focal length of the VIVOTEK IP8172 camera (2.8 mm) gives a ground pixel size and a field of view of about 10 m and 18 km, respectively, while its maximum focal length (12 mm) gives a ground pixel size and a field of view of about 2 m and 5 km, respectively. At the same distance, the FLIR A320 camera gives a ground pixel size and a field of view of about 10 m and 4 km, respectively (
Figure 3). Given the diameter of the whole crater area is approximately 1 km, we can conclude that the two sensors installed at Monte Cagliato site have a sufficient resolution and field of view to monitor eruptive phenomena at the summit area or in its proximity.
6. NETVIS Processing of Images Acquired During Effusive Activity
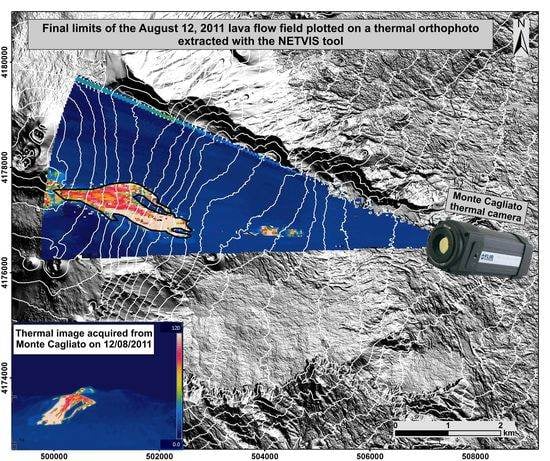
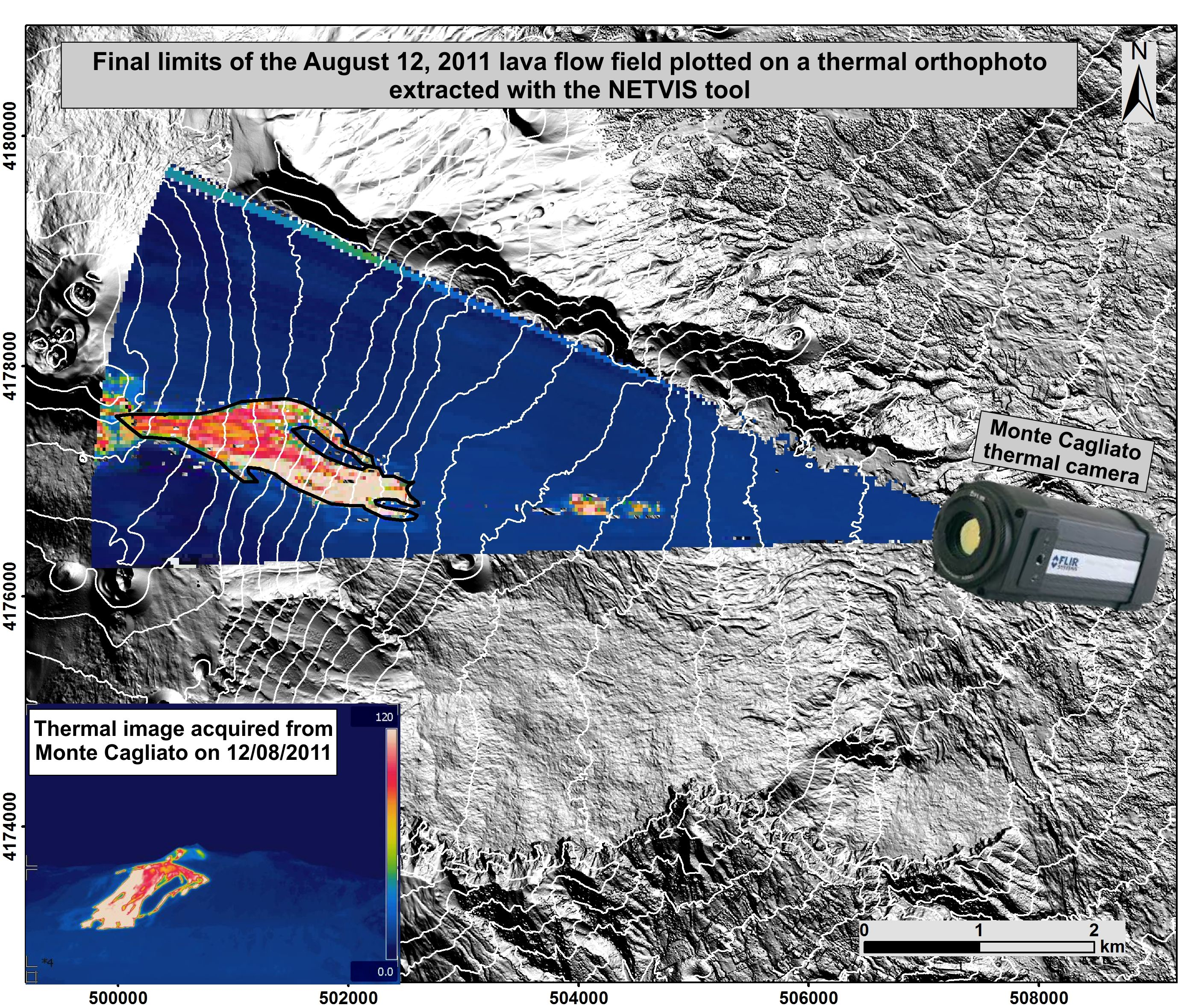
The performance of the NETVIS tool, in operational phases, was evaluated by processing images acquired by the FLIR A320 thermal camera installed at Monte Cagliato site (EMCT in
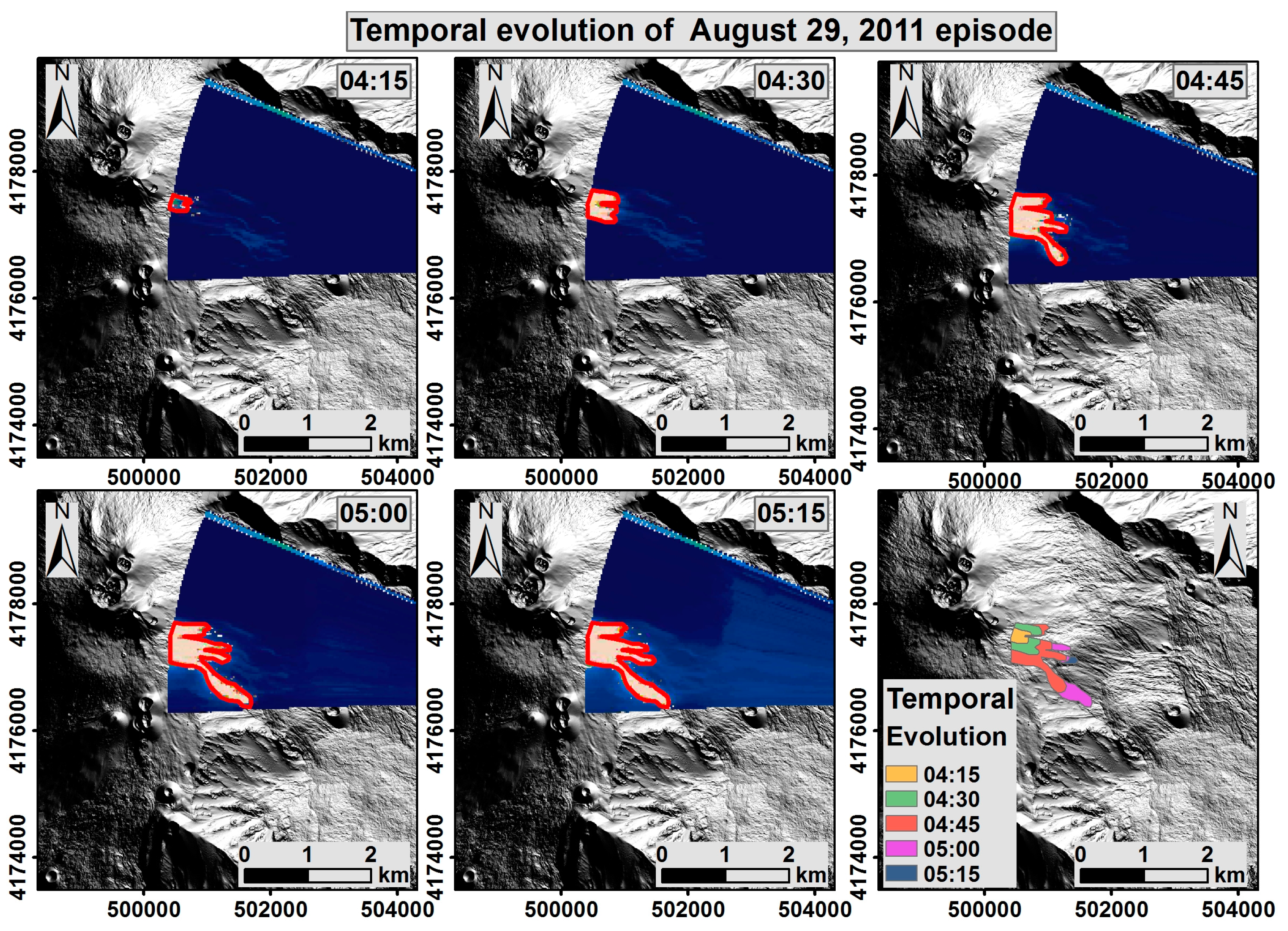
Figure 1) during two paroxysmal episodes of the New South East Crater on 12 August 2011 (07:50–15:15) and on 29 August 2011 (03:15–05:15). The two image datasets have been processed using nine virtual targets similar to the above-described simulated scenario, producing two time series of orthophotos (
Figure 12 and
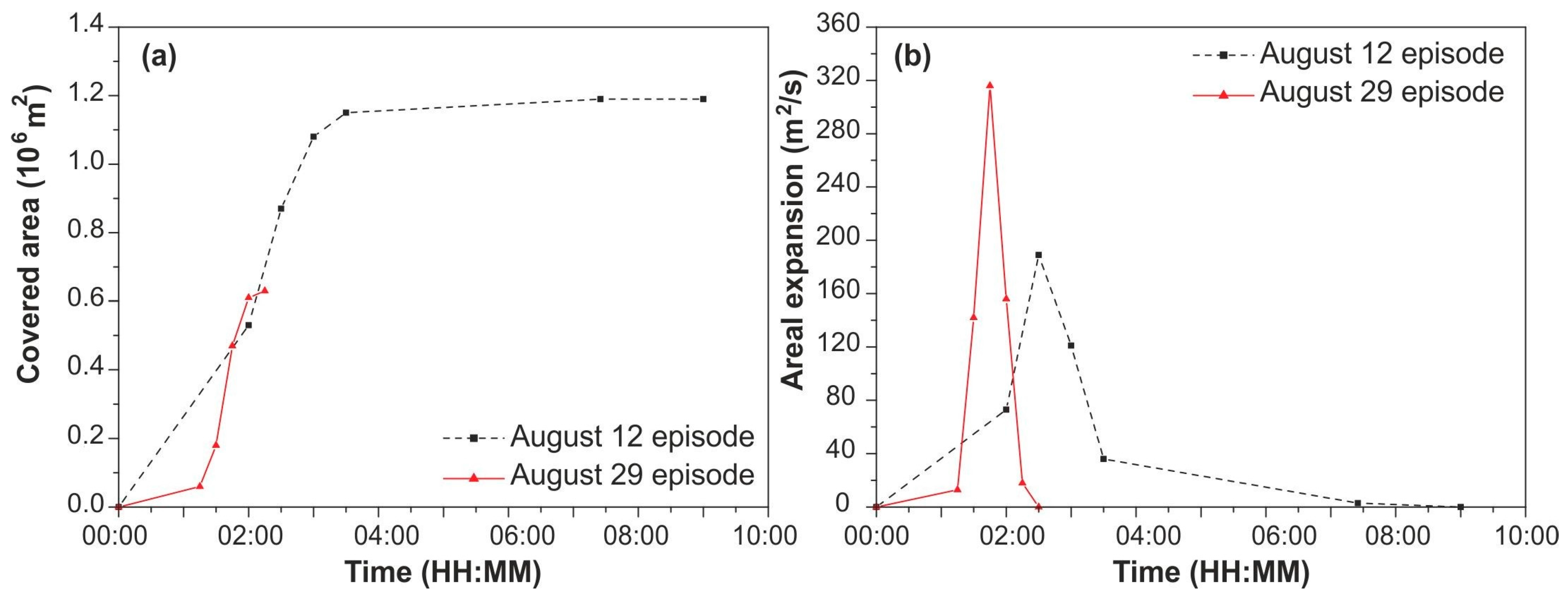
Figure 13). The temporal evolutions of the two lava flow fields, emplaced in Valle del Bove, were extracted by digitizing the flow limits on the orthophotos allowing estimating the covered areas and the corresponding rates of expansion (
Figure 14). The final area and length of the flow fields resulted 1.10 × 10
6 m
2 and 2.75 km, for the 12 August episode, and 0.63 × 10
6 m
2 and 1.9 km for the 29 August episode. The two flows showed quite different behavior: on 12 August it rapidly expanded between 08:00 and 10:30 almost reaching its maximum area, while on 29 August it increased very slowly between 03:00 and 04:15 abruptly reaching its maximum area at about 05:00.
Our estimates for the final areas and lengths are in good agreement with those obtained integrating ground measurements and photo interpretation [
32] that is 1.14 × 10
6 m
2 and 2.9 km for the 12 August episode and 0.65 × 10
6 m
2 and 2.7 km for the 29 August one. The discrepancy observed for the 29 August final length could be related to the fact that the flow overpassed the border of EMCT images. A further comparison was carried out against the results obtained for the 12 August flow by combining satellite images and georeferenced thermal maps extracted from a series of EMCT thermal images [
25]. This approach allowed measuring the active flow area independently from the flow expansion, thus furnishing useful information on the overlapping and cooling processes. Conversely, our method, which evaluates the entire covered area, is more focused to estimate the rate of advancement/expansion of the flow, in support of hazard evaluation and mitigation. Consequently, the comparison between the two methods is satisfactory until the entire covered area increases. In particular, the total flow area evaluated in [
25] is equal to 1.3 × 10
6 m
2, whereas our estimate (1.1 × 10
6 m
2) is lower because a portion of the flow front was not visible in the EMCT thermal images due to being obscured behind a local horizon.
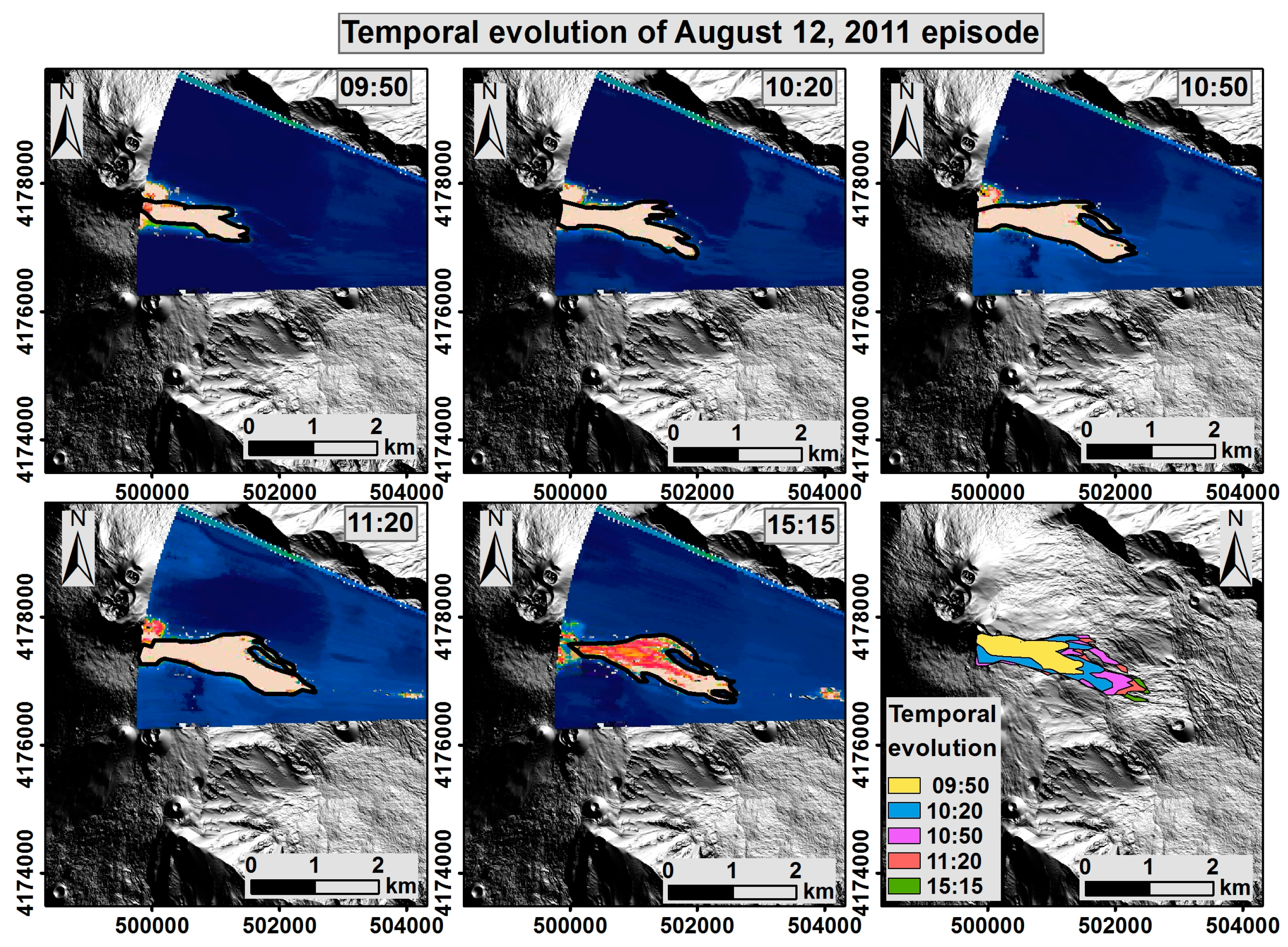
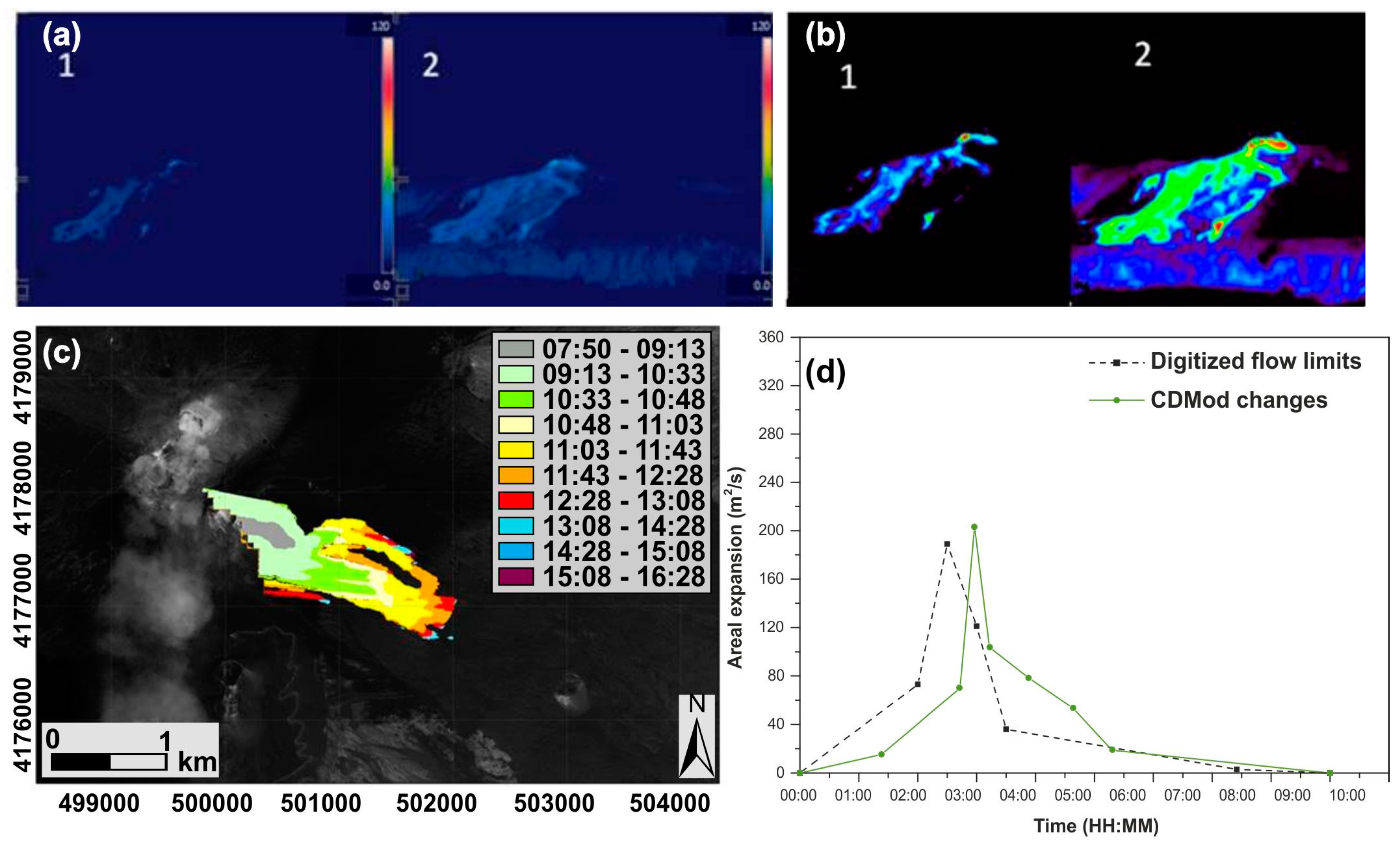
The sequence of thermal images acquired from Monte Cagliato thermal camera during Etna eruptive event of 12 August 2011 also allowed testing the Change Detection Module (
Figure 15). Despite the fact that thermal images would require a radiometric calibration before performing a multi-temporal analysis, the CDMod results are adequate to extract, from the raw images, a clear signature of the temporal evolution of the lava flow field (
Figure 15b) that represents the starting point for a subsequent, more accurate, feature extraction analysis. The application of the CDMod to pairs of subsequent thermal images allowed to automatically extract the relative changes of the area covered by the lava field and to map its temporal evolution (
Figure 15c) from which the trend of the areal expansion has been estimated (
Figure 15d).
Figure 15d shows a good agreement among the areal expansion trends evaluated from the manually digitized flow field limits (
Figure 12) and from the changes detected by the CDMod. The temporal shift between the two peaks is due to the use of different time intervals for the two available datasets.
The sequence of thermal images acquired from Monte Cagliato thermal camera during Etna eruptive event of 12 August 2011 also allowed testing the Change Detection Module (
Figure 15). Despite the fact that thermal images would require a radiometric calibration before performing a multi-temporal analysis, the CDMod results are adequate to extract, from the raw images, a clear signature of the temporal evolution of the lava flow field (
Figure 15b) that represents the starting point for a subsequent, more accurate, feature extraction analysis. The application of the CDMod to pairs of subsequent thermal images allowed to automatically extract the relative changes of the area covered by the lava field and to map its temporal evolution (
Figure 15c) from which the trend of the areal expansion has been estimated (
Figure 15d).
Figure 15d shows a good agreement among the areal expansion trends evaluated from the manually digitized flow field limits (
Figure 12) and from the changes detected by the CDMod. The temporal shift between the two peaks is due to the use of different time intervals for the two available datasets.
7. Discussion
A dedicated tool for processing, in quasi real-time, multi-temporal image datasets acquired by permanent video surveillance camera networks was implemented. As primary outputs the tool provides a series of orthorectified and georeferenced images that can be used for implementing a multi-temporal analysis aimed at mapping the evolution of lava flow fields and extracting quantitative parameters.
The NETVIS tool has been specifically designed to process images acquired from a permanent camera network, it satisfies the needs for prompt map extraction using systematically acquired data and it does not require a skilled operator in the field. The extracted map can be rapidly transferred to a control room, such that operating at the Osservatorio Etneo.
The use of the NETVIS tool to process thermal images acquired during an eruptive episode can greatly increases the temporal resolution (up to few tenth of minutes) of the extracted lava flow maps usually obtained from pictures taken during aerial and helicopter surveys every one or more days [
2].
The method requires the use of an updated DEM which, during and after an eruption, can be obtained through satellite or standard aerial surveys.
The complex morphology of the volcano and the possible presence of morphological obstacles can reduce the field of view of ground cameras; hence a portion of the monitored lava flow field cannot be shown in the analyzed images. This, for example, happened for the Monte Cagliato thermal images in the two analyzed events where a local horizon of the Valle del Bove had partially hidden the lava flows. This drawback can be overcome by using cameras with different fields of view on the observed eruptive event, which can be obtained by deploying mobile stations in the most suitable positions to observe the missing or hidden part. The analyses of additional site locations and sensor specifics, done in this work for an ideal camera network, can help to rapidly define the optimal locations for specific eruptive scenarios.
A disadvantage of the presented analysis is the impossibility of carrying out it in the case of prolonged bad weather conditions or in presence of the volcanic plume that hinders visibility of the eruptive scenario. Nevertheless, this is a problem common to all the sensors used for photogrammetric analysis from ground, aerial or satellite surveys. The use of fixed cameras, in continuous acquisition, enables having useful data captured in the case of short breaks in bad weather conditions, thus providing the imagery of the on-going event. This is not possible when using different sensors such as satellites, that have a pre-fixed revisiting time, or portable cameras temporarily deployed on the ground, which require a previous location planning and quite long installation times.
The tool was initially evaluated on a test field around La Montagnola camera (EMO) and then applied for an off-line processing of thermal image datasets acquired by the Monte Cagliato camera (EMCT) during two eruptive episodes in 2011. The tests provided suitable results on the temporal and spatial evolution of the lava flows. The short time required for the processing makes the procedure adequate to rapidly assess the evolution of lava flows, especially in the case of recurrent activity such as that observed at Mt. Etna between 2011 and 2015. Moreover, the La Montagnola test allowed assessing an expected resolution of a few meters for the extracted orthophoto. Finally, the application of the tool to the two thermal image datasets from Monte Cagliato allowed testing the entire procedure. The orthophotos extracted at the end of the two eruptive events allowed measuring the final areas and lengths that resulted 1.10 × 106 m2 and 2.75 km, for the 12 August episode, and 0.63 × 106 m2 and 1.9 km for the 29 August episode. The 12 August eruptive episode enabled to test the entire tool, including also the Change Detection Module. In fact, the temporal evolution of the corresponding lava flow has been evaluated by manually digitizing the flow field limits on the orthophotos extracted with the Image Orthorectification Module and by applying the Change Detection Module and the two areal expansion trends resulted in agreement.
The future implementation of the tool is to make it fully automated and to integrate it in the control room of the Osservatorio Etneo so that it can be automatically run once a new image is acquired or at pre-defined time intervals set from the control room operators. In this way, the images acquired by the thermal and visible cameras can be transformed in orthophotos. This would enable volcano monitoring to use the acquired images not only to observe and describe the ongoing phenomenon but also to extract quantitative information, such as the position and elevation of the most advanced flow front and its spreading, and to carry out a quasi-real-time mapping. Such data are necessary during an emergency phase when it is mandatory to provide quantitative information to the civil protection to support hazard evaluation and eventual mitigation actions.
8. Conclusions
In order to improve the use of the permanent ground NEtwork of Thermal and VIsible Sensors located on Mt. Etna (Etna_NETVIS), the first video-monitoring network installed on an active volcano, a photogrammetric approach for controlling syn-eruptive processes was developed. Previous studies on applications to volcanic eruptions, landslides and glaciers often adopted non-photogrammetric procedures and rely on the estimation of shift and rotation correction to obtain georeferenced images. The tool presented here comprises three modules able to orthorectify a multi-temporal image dataset acquired from a permanent camera surveillance network.
Experiments conducted on an test field to validate the develop approach provided orthophoto maps having at an accuracy of less than 10 m while on a real volcanic scenario permitted to quantify the temporal evolution of two lava flows generated by two short-lived eruptive episodes.
The implemented processing approach enhances the capability of a surveillance camera network, such as that operational at Mt. Etna, toward a quasi-real-time monitoring of lava flows rapidly expanding downhill. The frequent availability of georeferenced maps allows quantifying the expansion of the area inundated by the lava as well as to estimate the position and elevation of the most advanced flow front, thus contributing to a rapid assessment of hazardous scenarios for the zones where the lava flows can potentially propagate.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}