1. Introduction
Monitoring the carbon cycle and carbon stocks is of high importance to understand climate change. Several studies have reported that more than 40% of the world’s vegetation carbon stocks is stored in tropical forests [
1,
2]. In tropical forests, the quantity of carbon represents 43% to 55% of Above Ground Biomass (AGB) [
3,
4,
5]. Thus, mapping the AGB of tropical forests is of great importance in monitoring carbon stocks. Field inventories for AGB estimates, either by destructive (cutting and then weighing the tree) or non-destructive methods (by means of allometric equations), provide good estimates. However, these methods are not operational because they involve a great deal of labor and time and allow AGB estimates only at a local scale. Thus, a forest cannot be mapped using field inventories, hence the importance of remote sensing technology that facilitates the mapping of AGB. Indeed, remote sensing technology provides data for AGB estimates that cover large areas with a high spatial resolution and high revisit time.
Three main remote sensing data types are used for AGB estimates: optical, SAR (Synthetic Aperture Radar), and LiDAR. Optical images at low or medium resolutions and radar backscattering coefficient data are robust enough to estimate low to medium level AGB due to saturation of remote sensing data. Zhao et al. [
6] and Lu et al. [
7] have shown that optical data allow AGB estimates until AGB levels between 55 and 159 t/ha, depending on the forest species composition. In addition, SAR amplitude data, mainly in the L-band, were used to estimate the AGB. Luckman et al. [
8] observed a saturation point of 60 t/ha when plotting the JERS L-band backscattering coefficients as a function of the forest biomass located in the Central Amazon Basin. Baghdadi et al. [
9] found that the ALOS/PALSAR L-band backscattering coefficients saturate when the biomass of the Brazilian eucalyptus plantations reaches 50 t/ha. The use of radar backscattering coefficients in the P-band allows the estimation of higher AGB levels (290 t/ha for P-band [
10]). However, to date, there are no available P-band SAR instruments operating from space, and the airborne P-band SAR data are commercial, which makes the use of these sensors expensive. The near future space-borne P-band SAR sensor (BIOMASS mission scheduled to launch in 2020) would allow tomographic analyses of SAR data for higher level AGB estimates [
11]. Since Reigber and Moreira [
12], the exploitation of SAR data for conducting tomographic analyses has been the object of a growing interest within the SAR community. By using tomography, forest biomass can be investigated by considering not only the backscatter at each slant range and azimuth location, but also its vertical distribution. The potential of tomography to characterize forest structure was previously assessed in a number of studies relating the vertical structure of forests to forest AGB over French Guiana [
13,
14,
15]. In these studies conducted in French Guiana, the SAR signal in the P-band coming from upper vegetation layers (determined using SAR tomographic analyses) was found to be strongly correlated with forest AGB for AGB values ranging from 200 t/ha to 500 t/ha [
13,
15]. This finding was the first demonstration that forest AGB can be determined up to 500 t/ha with a 10% error at the 4-ha scale [
14].
Currently, LiDAR is the only available technology able to estimate higher AGB levels (up to 1200 t/ha from airborne LiDAR) [
16,
17] in comparison to optical and SAR amplitude data. LiDAR data capture the vertical structure of trees and allow the estimation of tree height up to 40 m with good precision [
18,
19,
20]. The tree height derived from LiDAR is strongly correlated with the AGB of the trees, with no saturation at higher AGB values [
19,
21,
22]. LiDAR data can be acquired from an aircraft and from space. Airborne and spaceborne LiDAR sensors record waveforms from small (<1 m) and large footprints (up to 60 m), respectively. Several studies have shown that the estimation of AGB from airborne LiDAR data is more accurate than that from spaceborne LiDAR [
23,
24]. However, the acquisition of airborne LiDAR data is costly, and the spatial coverage is limited to small areas. On the other hand, the available space-borne LiDAR data acquired by the Ice Cloud and Land Elevation Satellite (ICESat) are free, but do not provide continuous coverage of the earth. To overcome the limitation of spatial cover of LiDAR data and the saturation of optical and SAR amplitude data at medium AGB values, several studies tend to combined LiDAR with optical or SAR data for continuous AGB mapping at regional and global scales.
At the regional scale, Mitchard et al. [
21] estimated the AGB in Lopé National Park in central Gabon by coupling GLAS, PALSAR (L-band), and SRTM data. Lorey’s height was first derived from GLAS data and then converted to AGB through a simple equation. This equation was fitted using plot field measurements of Lorey’s height and AGB. Furthermore, a classification (40 classes) was performed using radar and SRTM data to determine regions with homogeneous vegetation. Finally, GLAS AGB estimates located within each region were averaged, enabling the spatial extrapolation of AGB estimates. The results showed relative error of AGB estimates of ±25% (AGB between 50 and 900 t/ha). Asner et al. [
25] mapped the Aboveground Carbon Density “ACD” (ACD = 0.47 × AGB) in one northern (659,592 ha) and one southern (1,713,088 ha) region of Madagascar using airborne LiDAR data, SRTM derived variables, and optical images. First, ground-based ACD estimate plots located within all forest types were used to calibrate LiDAR data to the ACD. Later, the airborne LiDAR-derived ACD was related to the SRTM-derived variables and variables derived from optical data through a linear regression model. Finally, this linear model was applied to map the ACD at 1 ha resolution in the two regions. The results showed that the uncertainty of AGB estimates is equal to 35% and 10% in the northern and southern regions, respectively (ACD between approximately 5 t/ha and 300 t/ha in both regions).
At the global scale, Saatchi et al. [
22] mapped the AGB of world tropical forests using a combination of data from 4,079 in situ inventory plots (across the three tropical continents) and GLAS samples of forest structure, plus optical and microwave imagery with 1-km spatial resolution. In this study, a power-law functional relationship (R
2 = 0.85) between the in situ Lorey’s height and in situ AGB was first performed. This relationship was then applied to tree height derived from GLAS to estimate AGB at each GLAS footprint location. Finally, a fusion model based on the maximum entropy (MaxEnt) approach was performed using spatial imagery to extrapolate AGB measurements from inventory plots and GLAS footprints to the entire landscape. Baccini et al. [
26] derived a carbon density map of pan-tropical forests using GLAS data together with MODIS images (Bidirectional Reflectance Distribution Function and land surface temperature) and SRTM data. In this this study, in situ AGB was first derived from plots within GLAS footprints using trees characteristics. Then, a statistical relationship between the in situ AGB estimates and GLAS waveform metrics was established, allowing the estimation of AGB for all GLAS footprints located across the tropics. Finally, a model relating GLAS-based AGB estimates and MODIS and SRTM data was calibrated and applied to derive the AGB map. Mitchard et al. [
27] assessed the reliability of a global AGB map produced by Saatchi et al. [
22] and Baccini et al. [
26] by using an accurate AGB map of Amazonian Columbia as a reference dataset. Mitchard et al. [
27] observed substantial discrepancies between the maps of Saatchi et al. [
22] and Baccini et al. [
26] over tropical forest areas (up to ±150 t/ha), even though both maps give similar means and total AGB values on the continent scale. In addition, the maps of Saatchi et al. [
22] and Baccini et al. [
26] have higher AGB values (up to 150 t/ha) in comparison to the accurate AGB map of Amazonian Columbia. Such bias could be related to the saturation of spatial data and to the use of an insufficient number of high in situ AGB values during model calibration, which reduces model performance for the estimation of high AGB values.
The main goal of this study is to investigate the contribution of spaceborne LiDAR data in overcoming the saturation at high AGB values of existing map produced in Madagascar by Vieilledent et al. [
28] using optical satellite images, a Digital Elevation Model (DEM) and climatic variables. To produce its AGB map, Vieilledent et al. [
28] first use a random forest model to relate in situ AGB measurements to the EVI (Enhanced Vegetation Index) derived from optical images, parameters calculated from the SRTM Digital Elevation Model, and climatic variables. Then, this random forest model was applied to map the AGB of forested areas in Madagascar. To date, the Vieilledent AGB map is the most recent and accurate map with medium resolution (250 m) for forested areas in Madagascar. The inconvenience of the Vieilledent AGB map is the inability to measure high AGB values, and therefore, a new method is required that incorporates LiDAR remote sensing to overcome such inconvenience. This inconvenience is mainly due to the use of the EVI and the percent tree cover derived from optical images at medium resolution as predictive variables for AGB estimates. The optical data at medium resolution saturates at high AGB values and induces an underestimation of high AGB [
6,
7]. An improvement in Vieilledent’s AGB map will allow a more accurate estimation of carbon stocks and mapping in forested areas in Madagascar. In our study, The AGB was first estimated from GLAS and DEM metrics, providing a spatially distributed (GLAS footprints geolocation) AGB estimation (GLAS AGB). Second, the spatial dependency of the additional correction factors (Vieilledent’s AGB map—GLAS AGB at each GLAS footprint location) was modeled, and an ordinary kriging interpolation of additional correction factors was performed to provide a correction factor map. Finally, the correction factor map and Vieilledent’s AGB map were summed to improve Vieilledent’s AGB map, taking into account the addition of GLAS data in AGB estimation. A description of the study area and the different datasets used in this study is provided in
Section 2.
Section 3 presents the methodology. The results and discussions are shown in
Section 4 and
Section 5, respectively. Finally,
Section 6 presents the conclusion.
3. Methodology
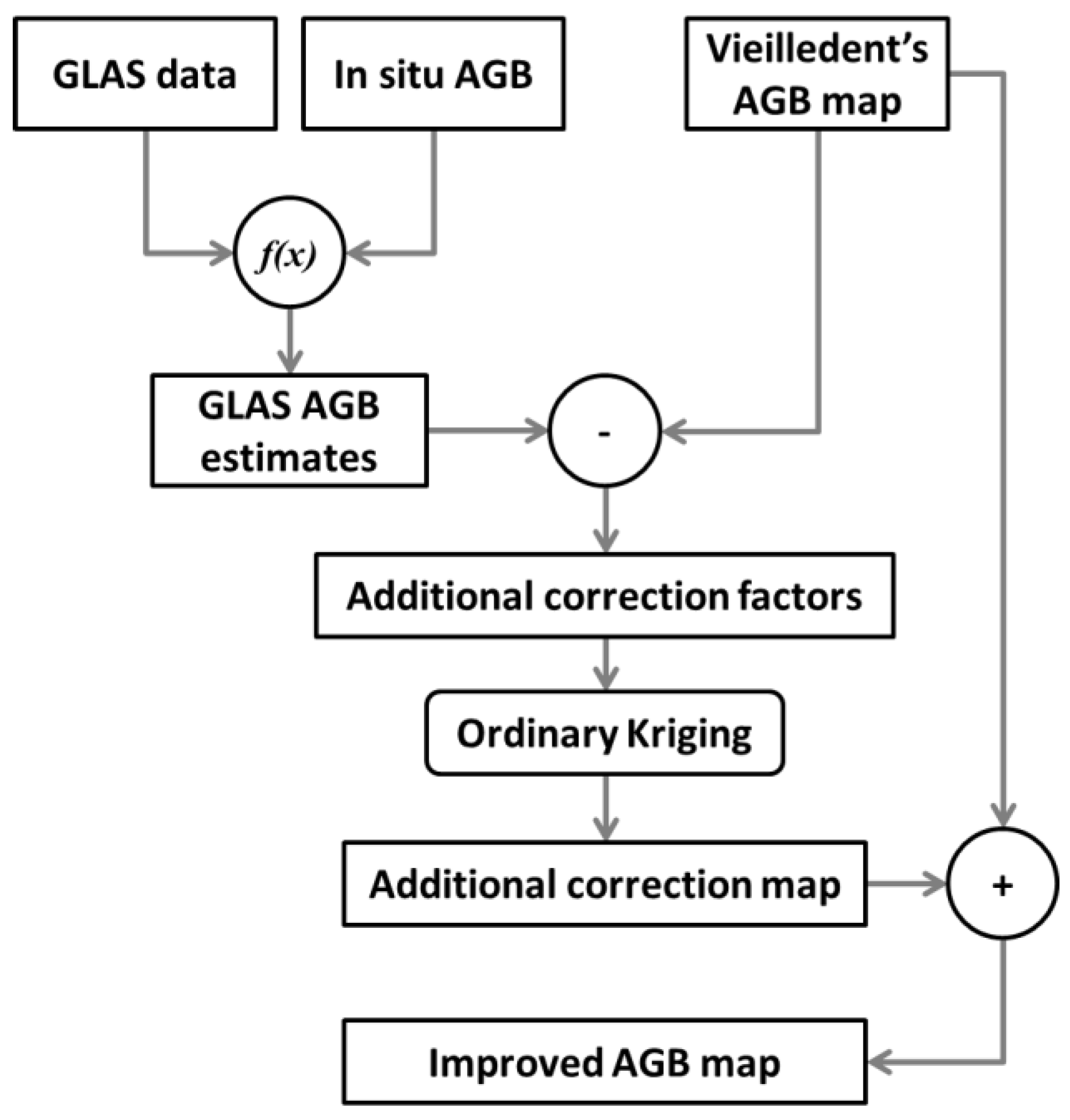
The methodology to improve the precision of Vieilledent’s AGB map consisted of (1) finding a model predicting in situ AGB from both GLAS and DEM metrics using in situ AGB neighboring GLAS footprints at a distance of up to 250 m; (2) applying the previous model to all GLAS footprints to derive the AGB (GLAS AGB); (3) calculating the additional correction factors, which were the differences between Vieilledent’s AGB map and GLAS AGB, at each footprint location; (4) performing an ordinary kriging interpolation to map the additional correction factors; and (5) improving Vieilledent’s AGB map by adding the kriged additional correction factors to Vieilledent’s AGB map. It should be noted that our methodology is not over reliant on the existing AGB map (Vieilledent’s AGB map) because the data used to produce this AGB map is available for free with global coverage, and therefore it was possible to reproduce Vieilledent’s AGB map. A brief scheme explaining the procedures for the improvement of Vieilledent’s AGB map is shown in
Figure 3.
To assess the relevance of our approach, first, the improved AGB map was compared to the in situ AGB to determine the gain in precision brought to Vieilledent’s AGB map. Then, the accuracy of the improved AGB map was compared to the accuracy of (1) the most recent pan-tropical AGB map produced by Avitabile et al. [
39] (Avitabile’s AGB map); and (2) another AGB map computed in this present study using our database (48,247 GLAS-derived AGB, DEM metrics, and field inventories) following the method proposed by Baccini et al. [
26], called “Baccini’s approach AGB map”.
3.1. Estimation of the AGB from GLAS Data
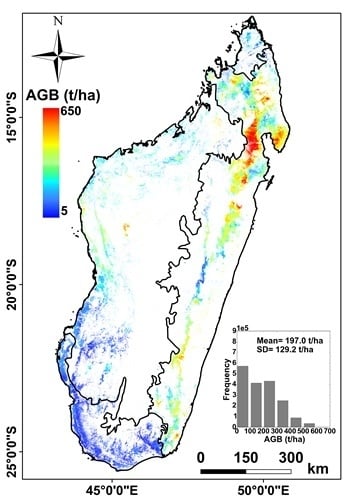
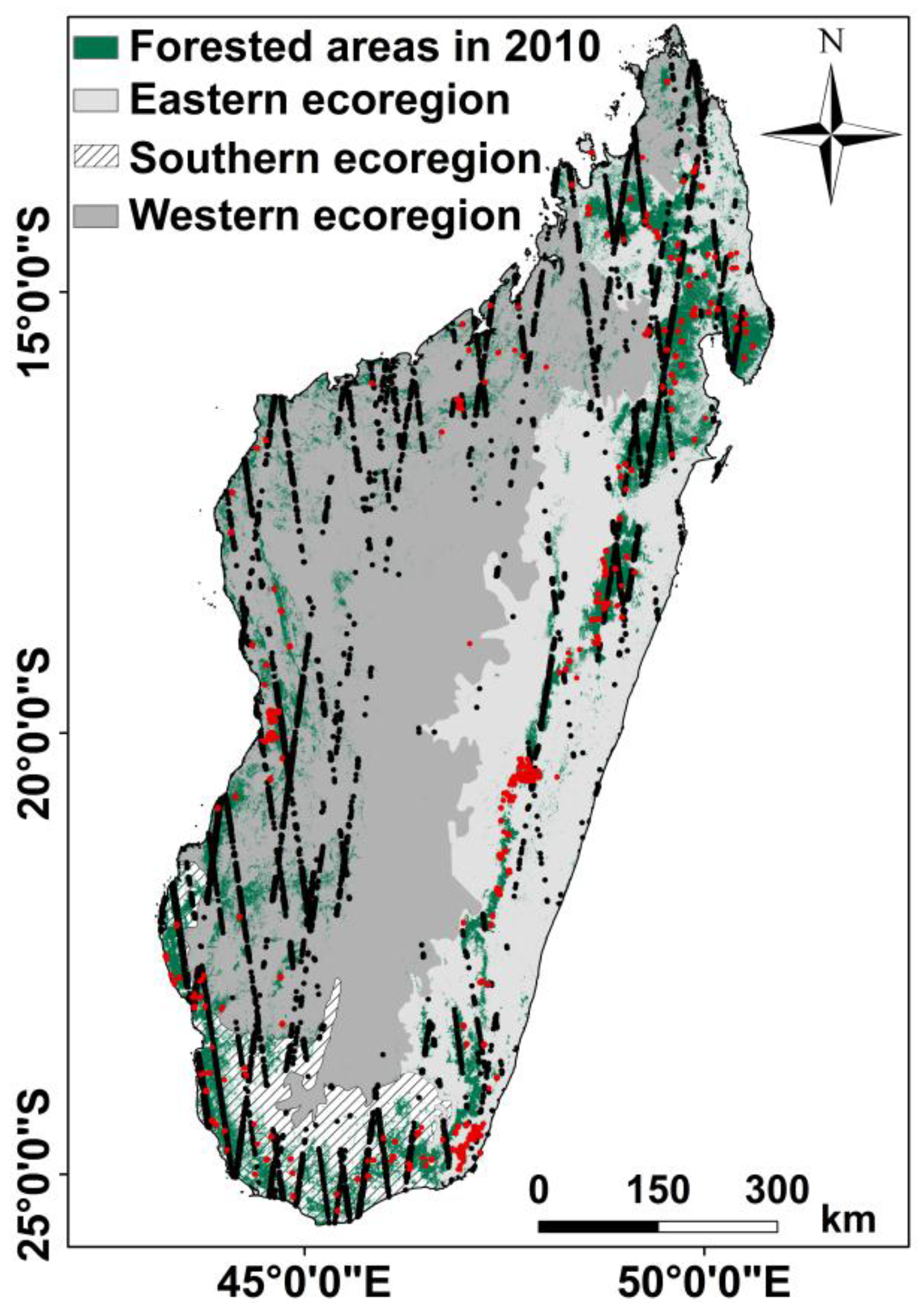
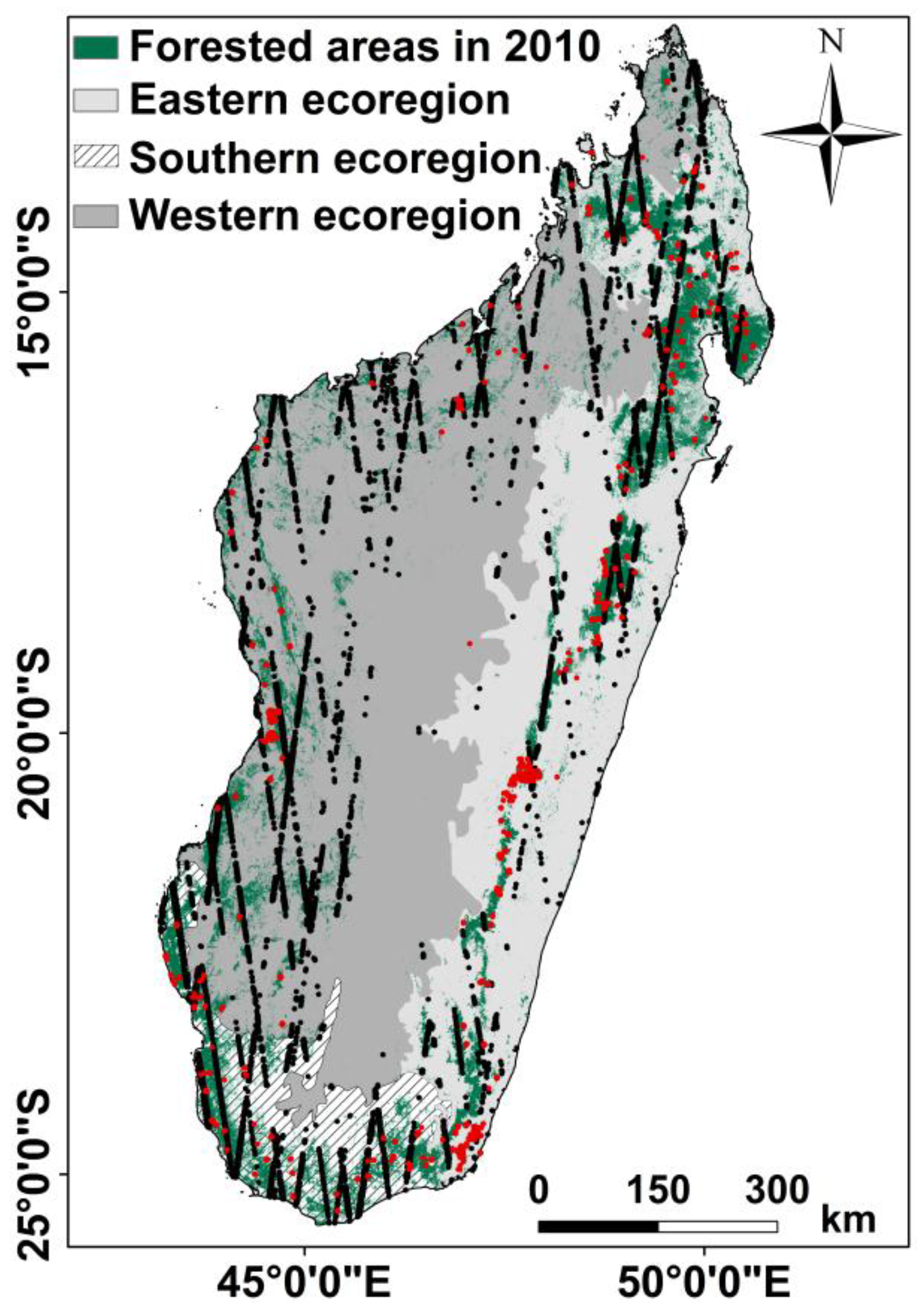
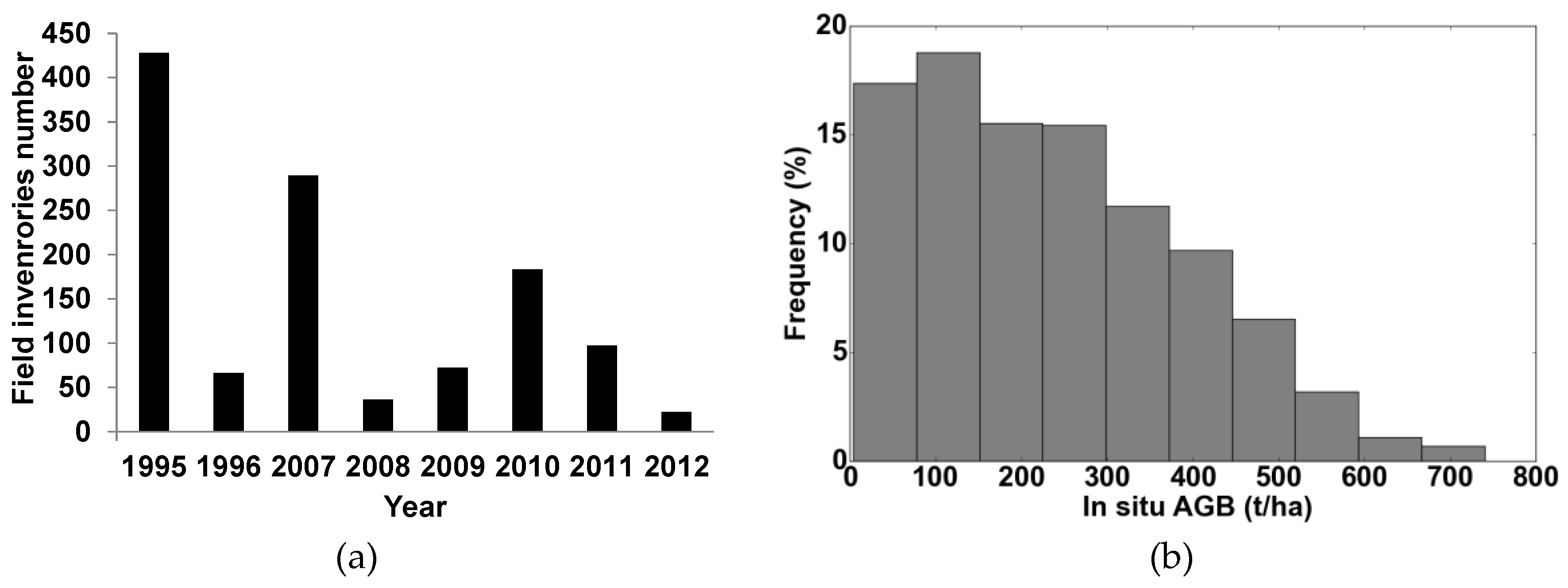
Madagascar is composed of three climatic ecoregions with three different forest types (
Figure 1). The western and southern ecoregions have lower in situ AGB values (<150 t/ha on average) compared to the eastern ecoregion (>250 t/ha on average). Accordingly, two different multilinear models were built to relate the in situ AGB to the GLAS metrics (Wext_cor, LE, TE, H10 through H90 with a 10% step) and DEM data (slope, TI, and Roug). The first model links the in situ AGB from the eastern ecoregion to the GLAS and DEM metrics. Similarly, the second model relates the in situ AGB from the western and southern ecoregions to the GLAS and DEM metrics. A step-wise regression technique (with both forward and backward processes) was used to select the best variables to be used for AGB estimation. Finally, these multilinear models were applied to all GLAS footprints, using only best variables to derive the AGB (GLAS AGB). GLAS footprints did not intersect in situ AGB. To associate an in situ AGB value with GLAS footprints, we considered a maximum of 250 m between the in situ AGB and GLAS footprints.
3.2. The Improved AGB Map
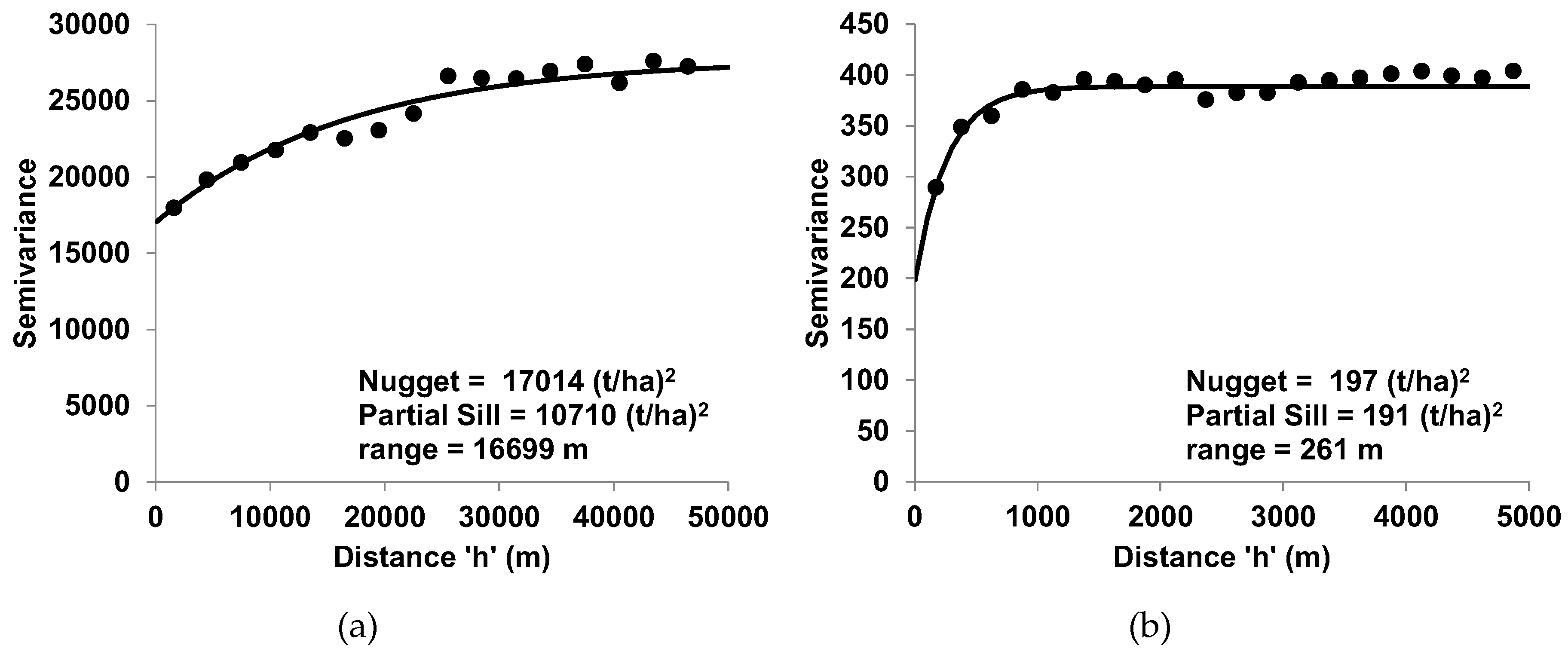
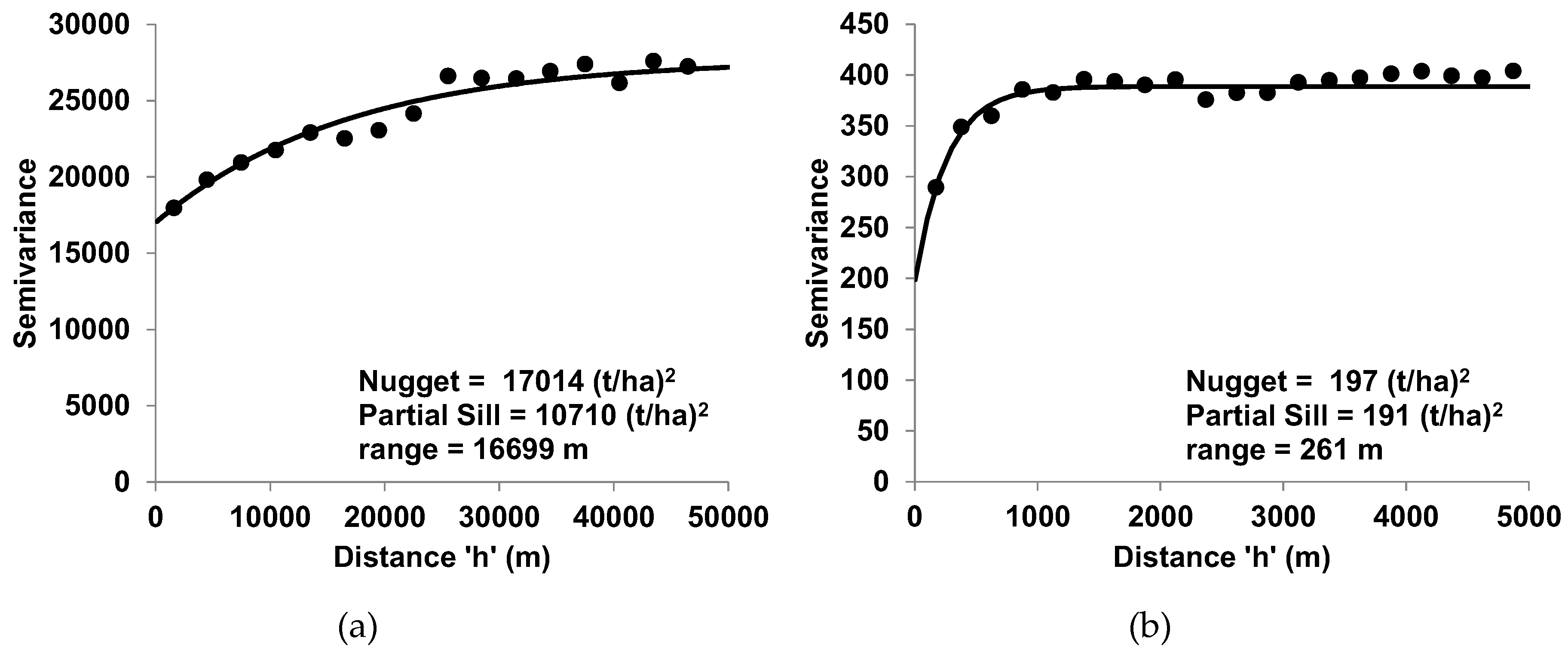
An ordinary kriging (OK) interpolation was used to improve the precision of Vieilledent’s AGB map. The OK model allows the interpolation of additional correction factors (Vieilledent’s AGB map—GLAS AGB at each GLAS footprint locations) based solely on a regionalized linear model known as a semivariogram. The semivariogram describes the spatial dependency between additional correction factors and draws the semi-variance
as a function of the distance between samples
h using the following function:
where
is the semi-variance as a function of the lag distance
h,
N(
h) is the pairs data number separated by h, and e is a local measure of the additional correction factors at locations
and
. The semivariogram function has three main parameters: (1) the nugget: the semi-variance value at h close to zero; (2) the sill: semivariance at which no spatial correlation exists at long distances [
40]; and (3) the range: the distance at which the sill is reached.
After drawing the empirical semivariogram samples, and assuming an order-2 stationary process (fixed Esperance and homogeneous spatial dependency over all space), an admissible model in R
2 is fitted to the empirical variogram, determining the semivariogram function parameters. Ordinary kriging (centered on an unknown value) is thus performed using a fitted semivariogram function, which estimates the value
and the prediction variance at any location s0 (location where no additional correction factors are available) using the linear equation:
where
is the predicted value at an unvisited location
and
are the kriging weights of n neighboring samples [
40]. The weights
depend on the fitted semivariogram function, the distance to the predicted location, and the spatial design of
data.
From that framework, a sub-variogram model was built for each ecoregion to respect the conditions of stationarity. Then, for each ecoregion, an OK interpolation was performed using the additional correction factors within that ecoregion to create a correction factor map. Furthermore, the correction factor map of that ecoregion was adding to the part of Vieilledent’s AGB map that overlaps to increase its precision. Finally, the two improved AGB maps (of both eastern and western ecoregions) derived using the two variograms were combined to obtain the improved AGB map that covered all of Madagascar with a spatial resolution of 250 m.
To calculate the precision of the improved AGB map, first, a spatial intersection between the in situ AGB and the improved AGB map pixels was performed. Then, AGB pixels that contained at least two in situ AGB were selected, as well as the associated in situ AGB. Finally, the RMSE and R2 were calculated by using the averaged values of the in situ AGB located within the same AGB pixel. The in situ AGB used to build the model for AGB estimation from GLAS data were not used to calculate the precision of the improved AGB map.
3.3. Comparison between the Improved AGB Map and Avitabile’s AGB Map
The precision of the improved AGB map was compared to that of the pan-tropical AGB map produced by Avitabile et al. [
39] (Avitabile’s AGB map). Avitabile’s AGB map was used as benchmark because, to date, this map is considered to be the most recent and accurate pan-tropical AGB map. Avitabile et al. [
39] combined the global AGB map of Saatchi et al. [
22] and Baccini et al. [
26] into a pan-tropical AGB map (1 km resolution) using reference AGB data. The fusion model consists of bias removal and weighted linear averaging of both the Saatchi et al. [
22] and Baccini et al. [
26] AGB maps to produce an AGB map with higher accuracy. The bias removal consisted of adding the mean difference between the input map and the reference AGB data to the input maps (Saatchi’s and Baccini’s AGB maps). The results showed that the RMSE of Avitabile’s AGB map (89 t/ha) is lower by 15%–21% than that of the input maps (Saatchi’s and Baccini’s AGB maps).
Avitabile’s AGB map is produced with a spatial resolution of 0.00833° (1 km) and the WGS-84 geographic projection. To make Avitabile’s and the improved AGB map comparable, Avitabile’s AGB map was re-projected into UTM (Universal Transverse Mercator), to be in the same projection as the improved AGB map. In addition, the improved AGB map was resampled to 1 km as follows: the AGB pixels of the improved AGB map that fall within each cell of Avitabile’s AGB map were averaged.
Finally, Avitabile’s AGB map and the improved AGB map resampled to a spatial resolution of 1 km were compared to the in situ AGB in the same manner adopted to validate the improved AGB map. However, to validate these maps, we used AGB pixels that cover more than three in situ AGB values.
3.4. Comparison between the Improved AGB Map and the AGB Map from Baccini’s Approach
To assess the relevance of our approach it was important to compare it to Baccini’s approach, since the latter is the most commonly used approach for AGB mapping [
22,
25,
41]. First, we used our database (48,247 GLAS derived AGB, DEM metrics, and field inventories) and the auxiliary variables from the study of Vieilledent et al. [
28], to produce a AGB map following the method proposed by Baccini et al. [
26]. Then, we compared between precision of the improved AGB map and the precision of the AGB map from Baccini’s approach. The precision of the AGB map from Baccini’s approach was calculated in the same manner used to validate the improved AGB map.
To produce the AGB map using Baccini’s approach, first, the established relationships between in situ AGB and both GLAS and DEM metrics (cf.
Section 3.1) were applied to derive the AGB from each GLAS datapoint (48,247 footprints). Second, the GLAS-derived AGB values were related to the three types of explicative variables in the study of Vieilledent et al. [
28] using the random forest model. Finally, the random forest model was applied for AGB mapping with a spatial resolution of 250 m, and the AGB map from Baccini’s approach was obtained.
Baccini et al. [
26] provided a pan-tropical AGB map covering Madagascar. In their study, the in situ AGB measurements used to build the relationship with GLAS and DEM metrics are missing over Madagascar. Therefore, Baccini’s AGB relationship is not representative enough to derive AGB estimates from GLAS metrics, leading to an AGB map with poor precision. For this reason, Baccini’s AGB map was reproduced in the present study using our in situ AGB measurements available for Madagascar.
5. Discussion
In this study, a method based on the use of GLAS data was developed mainly to overcome the saturation at high AGB values of the existing AGB map derived by Vieilledent et al. [
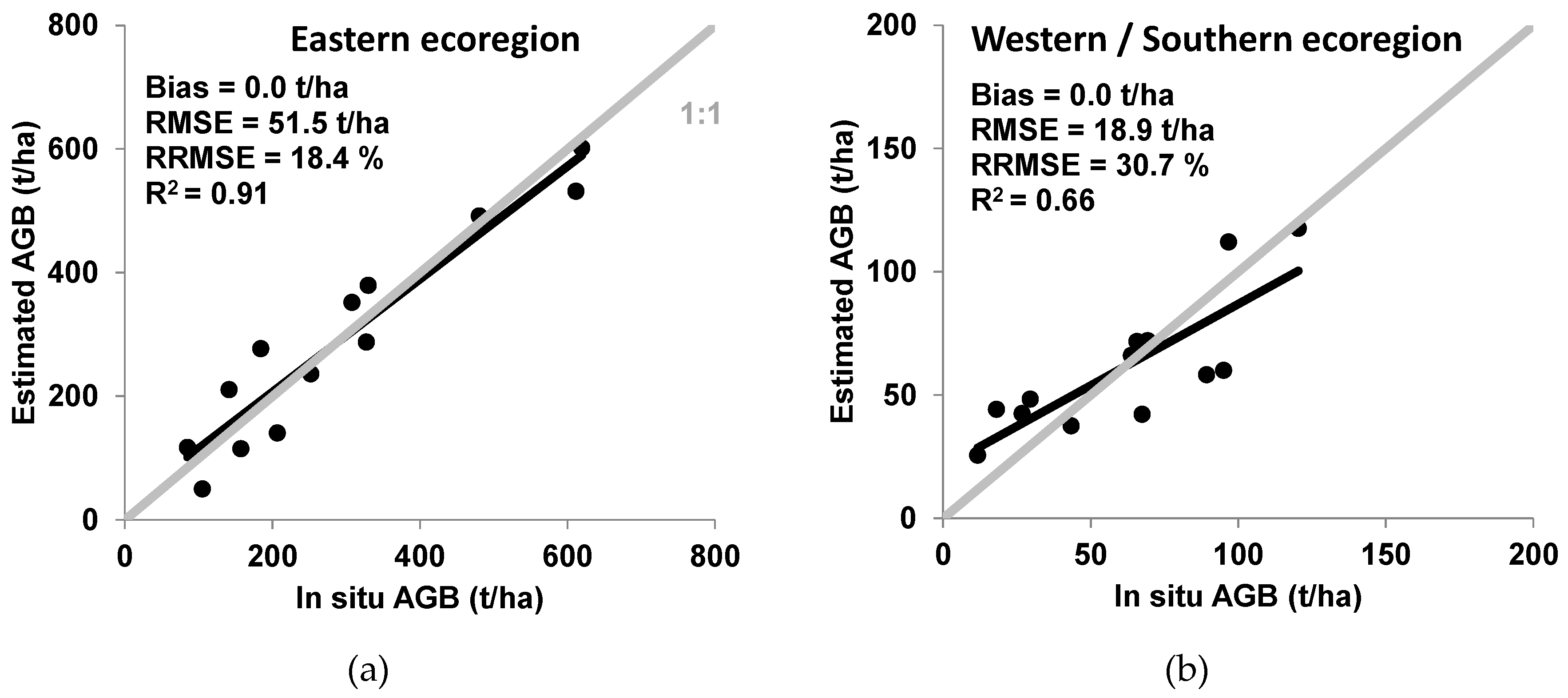
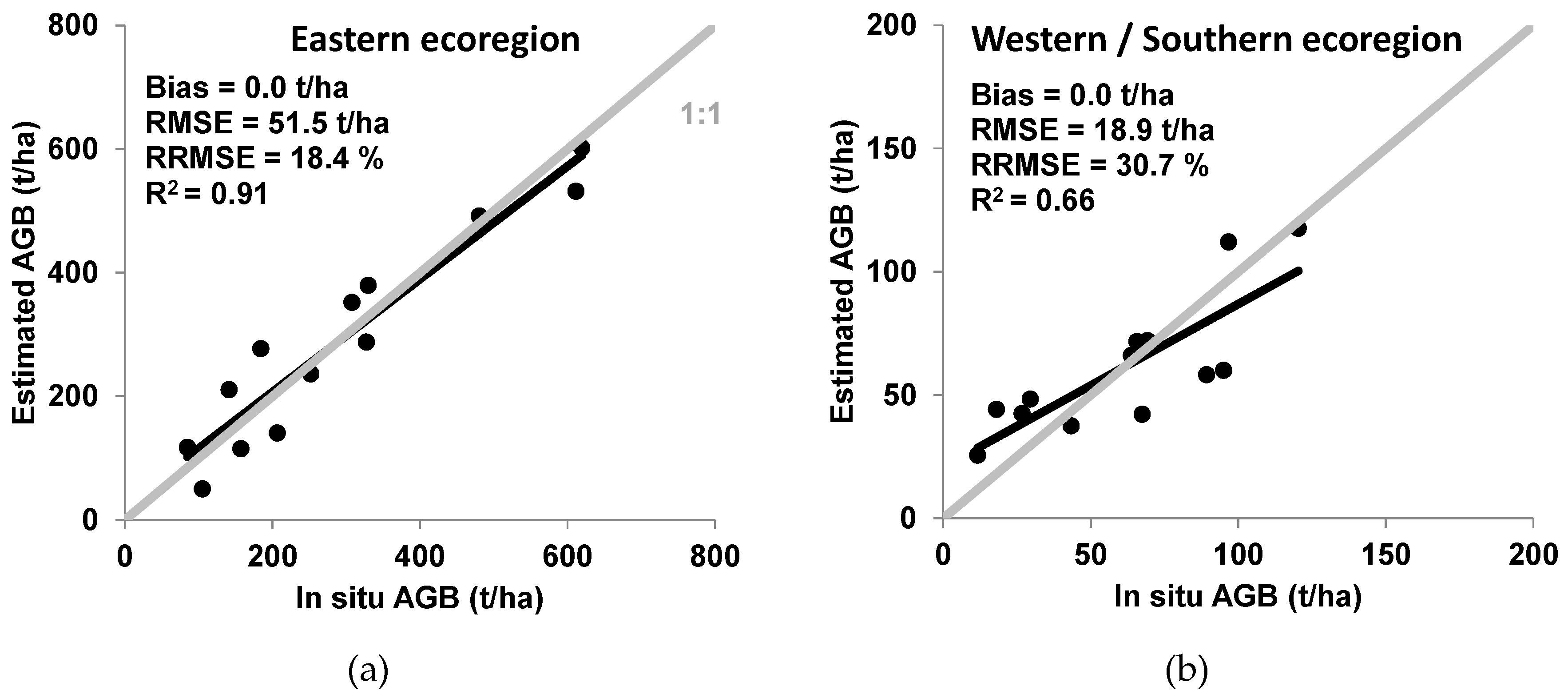
28] using optical images, parameters computed from DEM, climatic variables, and field inventories. A good correlation between in situ AGB and GLAS and DEM metrics was obtained (R
2 = 0.91 for the eastern ecoregion, and R
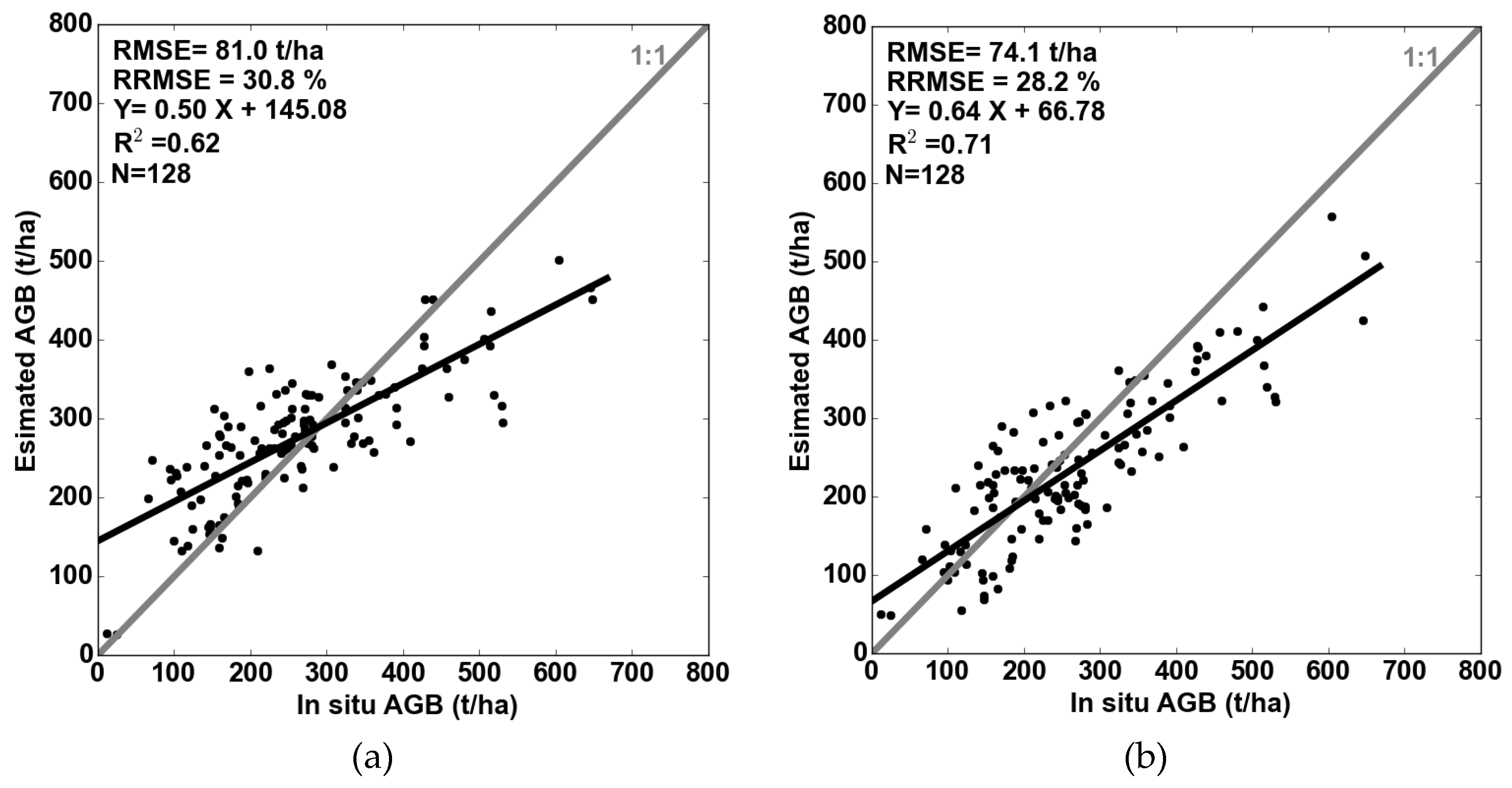
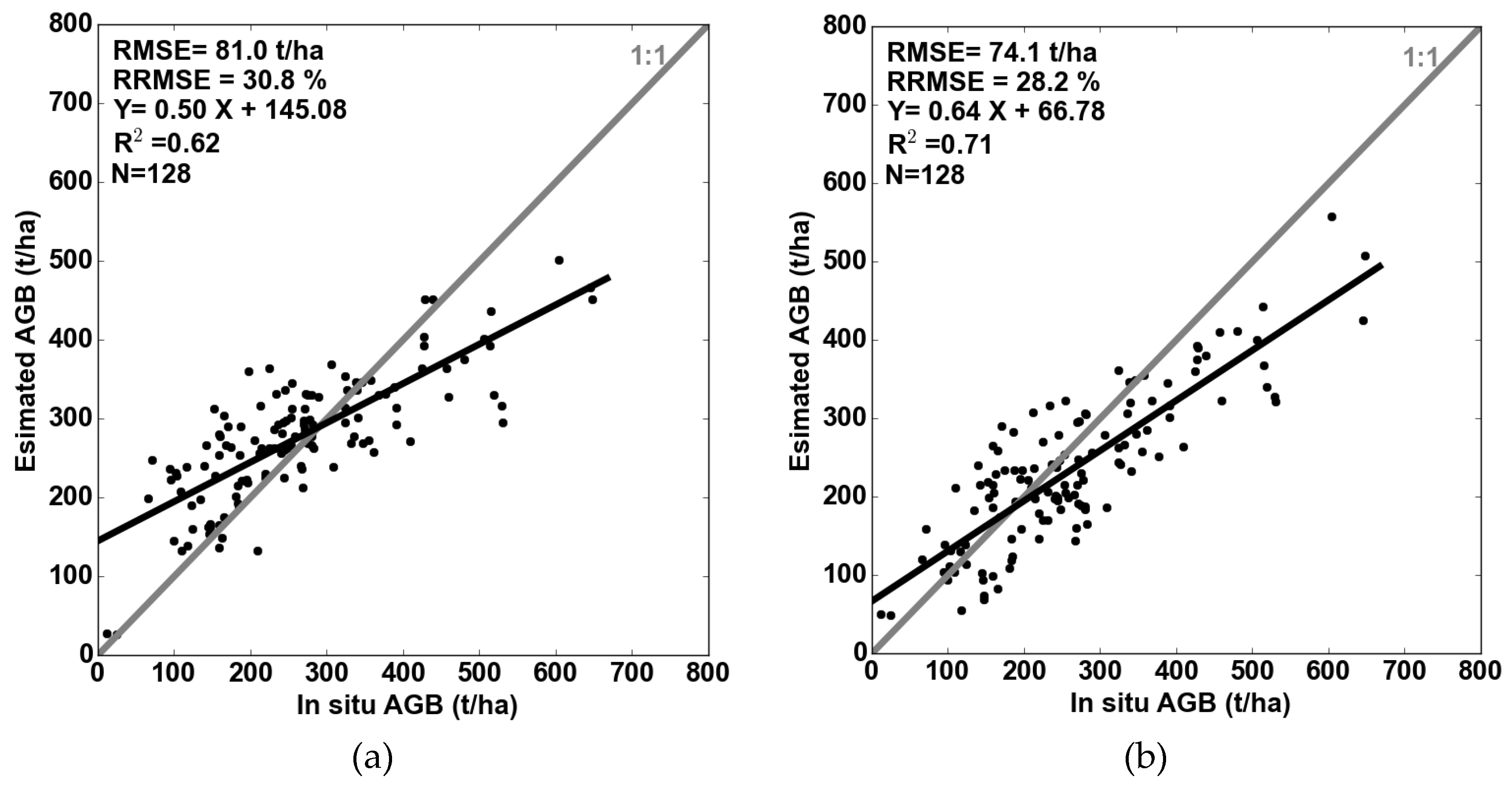
2 = 0.66 for the western and southern ecoregions). Despite the fact that the relationships between in situ AGB and both GLAS and DEM metrics was built with only a few in situ AGB samples (14 for the eastern ecoregion, and 13 for the western and southern ecoregions) located within a distance of 250 m from GLAS footprints, the integration of GLAS data leads to an improvement in the precision of Vieilledent’s AGB map (
Figure 6). This improvement was possible because Vieilledent’s AGB map was created by using the EVI (Enhanced Vegetation Index) computed from optical images as an input parameter. The EVI saturates at higher AGB levels, leading to an underestimation of high AGB values, which limits the estimation of AGB to lower values (lower than 550 t/ha in the study of Vieilledent et al. [
28]). In contrast, our approach is based on the integration of LiDAR GLAS data, which are able to provide much higher AGB values, and thus improve Vieilledent’s AGB map (derived using optical data), even in densely forested areas (
in situ AGB up to 650 t/ha). However, results showed that the improved AGB map values still underestimate the in situ AGB values for AGB higher than 350 t/ha. This is probably due to the fact that (1) the used spaceborne LiDAR data are not sufficiently dense (0.5 points/km
2) to completely eliminate the high underestimation of AGB for values higher than 350 t/ha and (2) the data used, mainly optical (such as EVI), to derive the Vieillendent’s AGB map have low sensitivity to high AGB values (high than 350 t/ha). Fayad et al. [
42] showed that the use of dense spaceborne and airborne LiDAR data in addition to other data (optical, DEM, and environmental) provides good estimation of the AGB. In general, the integration of GLAS-derived AGB moderately increases the precision of Vieilledent’s AGB map by 7.6 t/ha and 5.8 t/ha for AGB values lower and higher than 400 t/ha, respectively. Considering in our method remote sensing variables that describe the floristic composition and the biogeography characteristics of forested areas would improve the precision of GLAS-derived AGB and consequently, the correction factor map, and thus brought a larger improvement to Vieilledent’s AGB map. Finally, our approach could be applied to improve the most recent and accurate pan-tropical AGB map produced by Avitabile et al. [
39] because GLAS LiDAR shots cover the pan-tropical forested areas [
43]. Applying our approach would improve Avitabile’s AGB map mainly by overcoming the problem of saturation at high AGB values.
Our approach uses an existing AGB map (Vieilledent’s AGB map). The use of an existing AGB map does not represent an inconvenience, since it would have been possible for us to derive this AGB map from freely available remote sensing data. The advantage of the proposed approach is that despite LiDAR data density of 0.5 points/km
2, a simple ordinary kriging seems sufficient to improve an AGB map derived using optical data (such as Vieilledent’s AGB map). It should be noted that GLAS footprints have a good distribution over forested areas in Madagascar. The main potential limitation of our approach is the unavailability of GLAS data since 2009 (GLAS data are between 2003 and 2009). Thus, this method could be applied to improve an AGB map created using data from between 2003 and 2009 and to an AGB map for forests with conditions that have not changed with respect to the period between 2003 and 2009. In addition, field inventories are necessary to apply our approach. However, a relatively low number of field inventories could be enough to calibrate LiDAR and SRTM metrics data to AGB [
25].
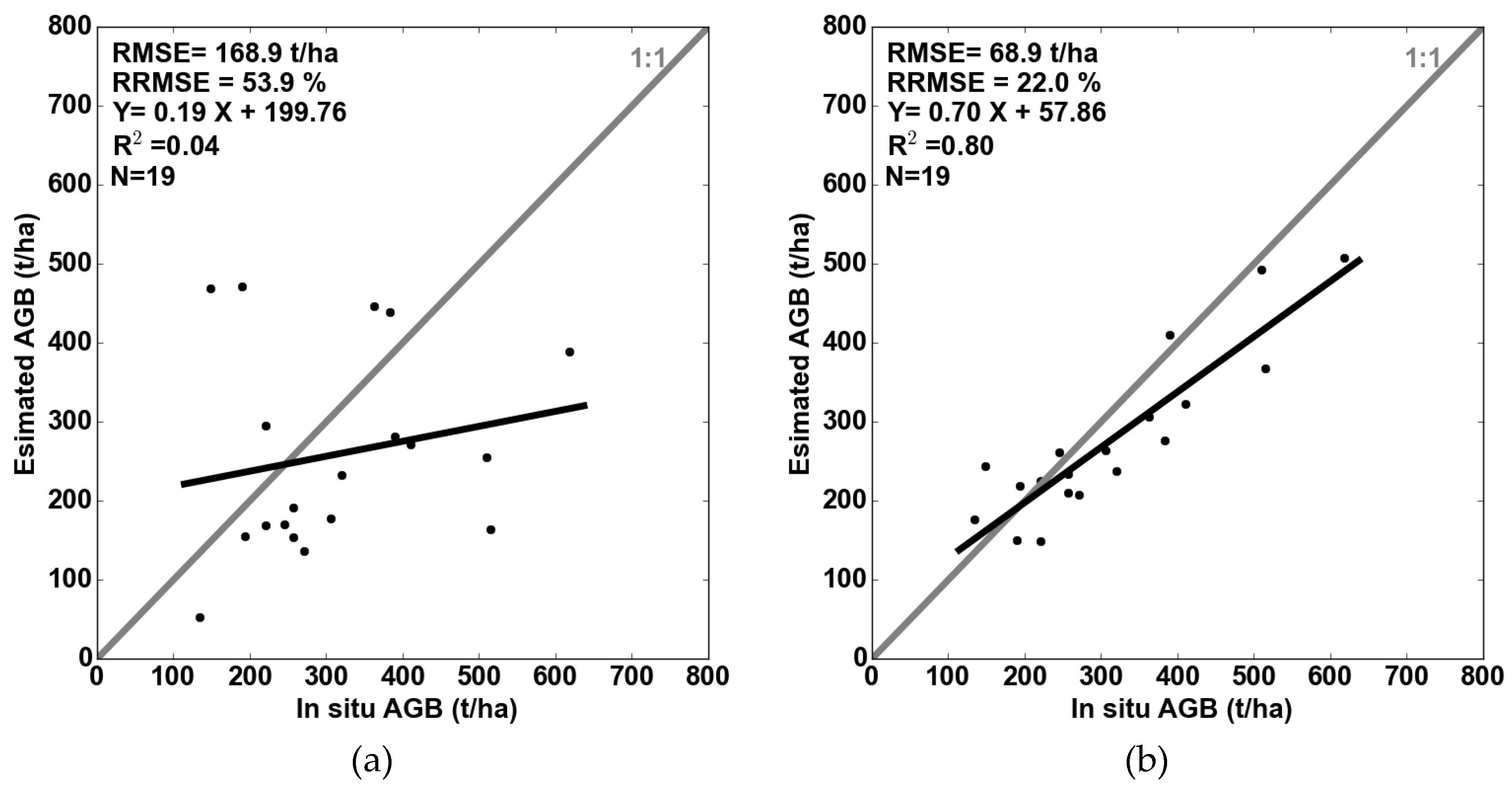
In this paper, we also compared the improved AGB map and the most recent pan-tropical AGB map provided by Avitabile et al. [
39]. Avitabile’s AGB map was created using a fusion of data from Baccini’s and Saatchi’s AGB maps and reference data. The results showed that the improved AGB map has better precision than Avitabile’s AGB map. This is because the reference data used for the calibration of the fusion model in the study of Avitabile et al. [
39] does not cover the ranges of AGB values of forested areas in Madagascar (up to 700 t/ha according to our in situ AGB measurements). These reference data used by Avitabile et al. [
39] (60 samples) are located in a zone to the north of Madagascar characterized by in situ AGB values lower than 235 t/ha [
39].
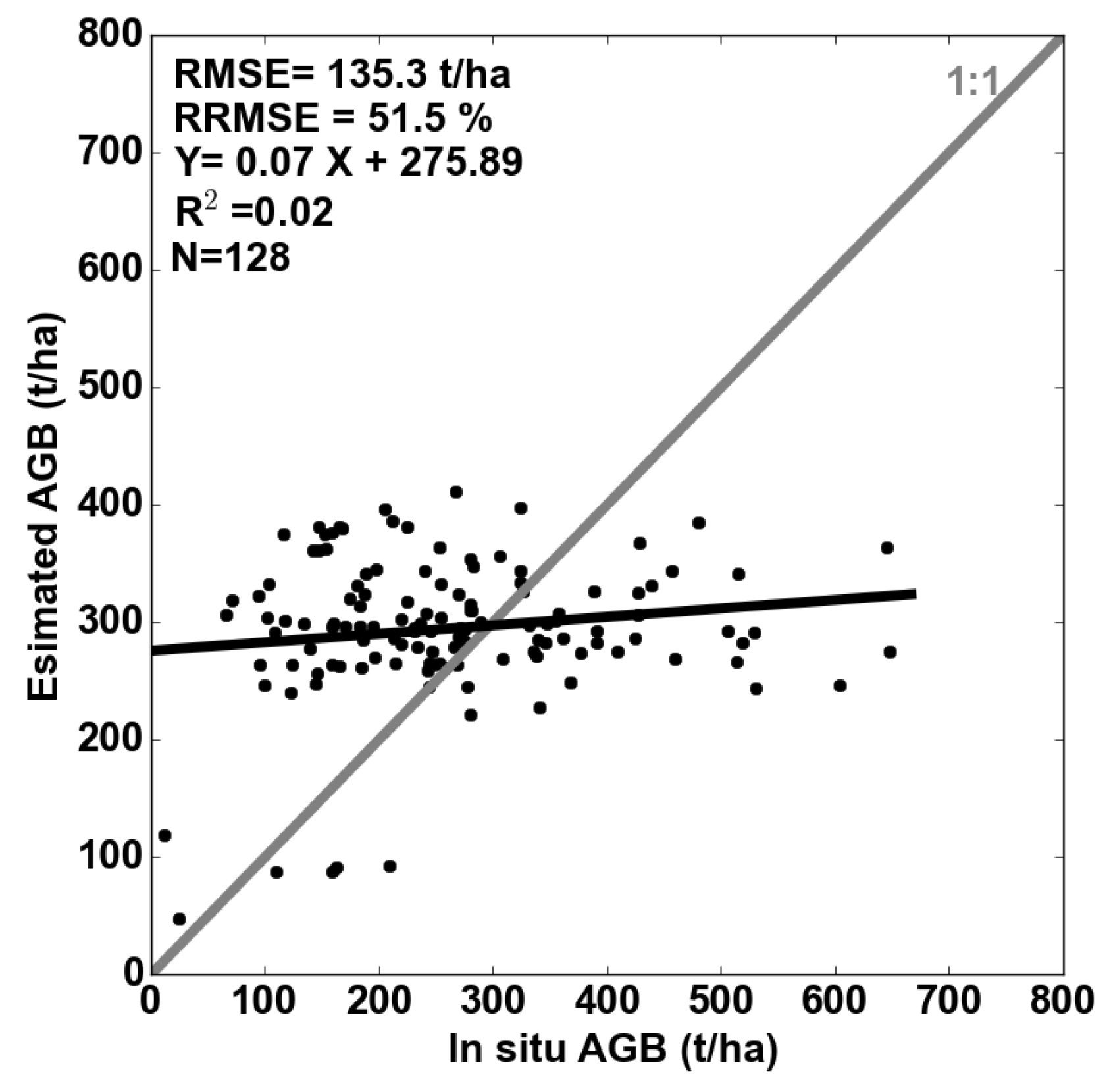
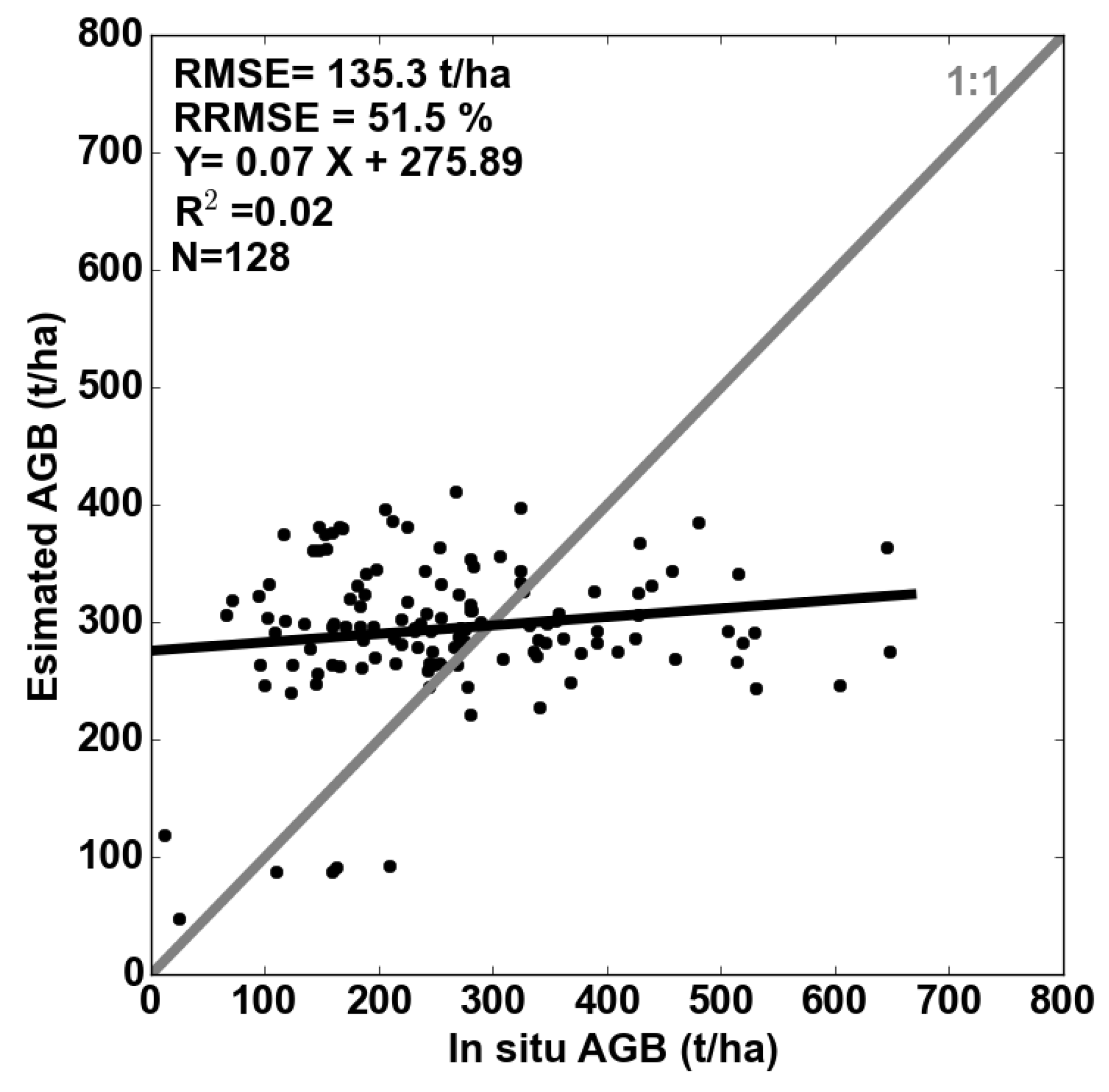
In addition, the most popular method, proposed by Baccini et al. [
26], for AGB mapping was applied using our in situ AGB measurements to produce an AGB map (Baccini’s approach AGB map). The results showed that the accuracy of the Baccini’s approach AGB map was lower than the accuracy of the improved AGB map. Thus, it seems that using optical data as predictive variables to derive AGB estimates do not allow to the accurate estimation of high AGB values, even if GLAS-derived AGB values are used to establish the relationship with the optical data.
Finally, our approach could be applied to improve the existing global pan-tropical AGB map, mainly by overcoming the problem of saturation at high AGB values, from which most of these recent pan-tropical maps, such as Avitabile’s AGB map and Baccini’s AGB map, suffer.
6. Conclusions
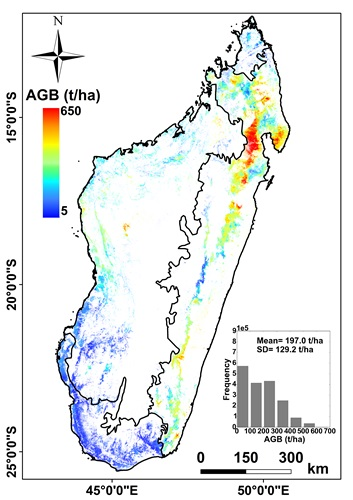
This study analyzed the potential of LiDAR sensor data and ICESat/GLAS data to improve a AGB map recently established in Madagascar (Vieilledent’s AGB map) using optical and digital elevation model spatial imagery and climatic variables. First, GLAS data were used to provide AGB estimates at 48,247 footprint locations covering the forested areas in Madagascar between 2003 and 2009 with a density of 0.5 points/km
2 of forest (
Figure 1). Second, the additional correction factors, which are the difference between Vieilledent’s AGB map and GLAS AGB, were calculated. Third, an ordinary kriging interpolation was performed using these additional correction factors to provide a correction factor map. Finally, Vieilledent’s AGB map and the correction factor map were summed to improve Vieilledent’s AGB map.
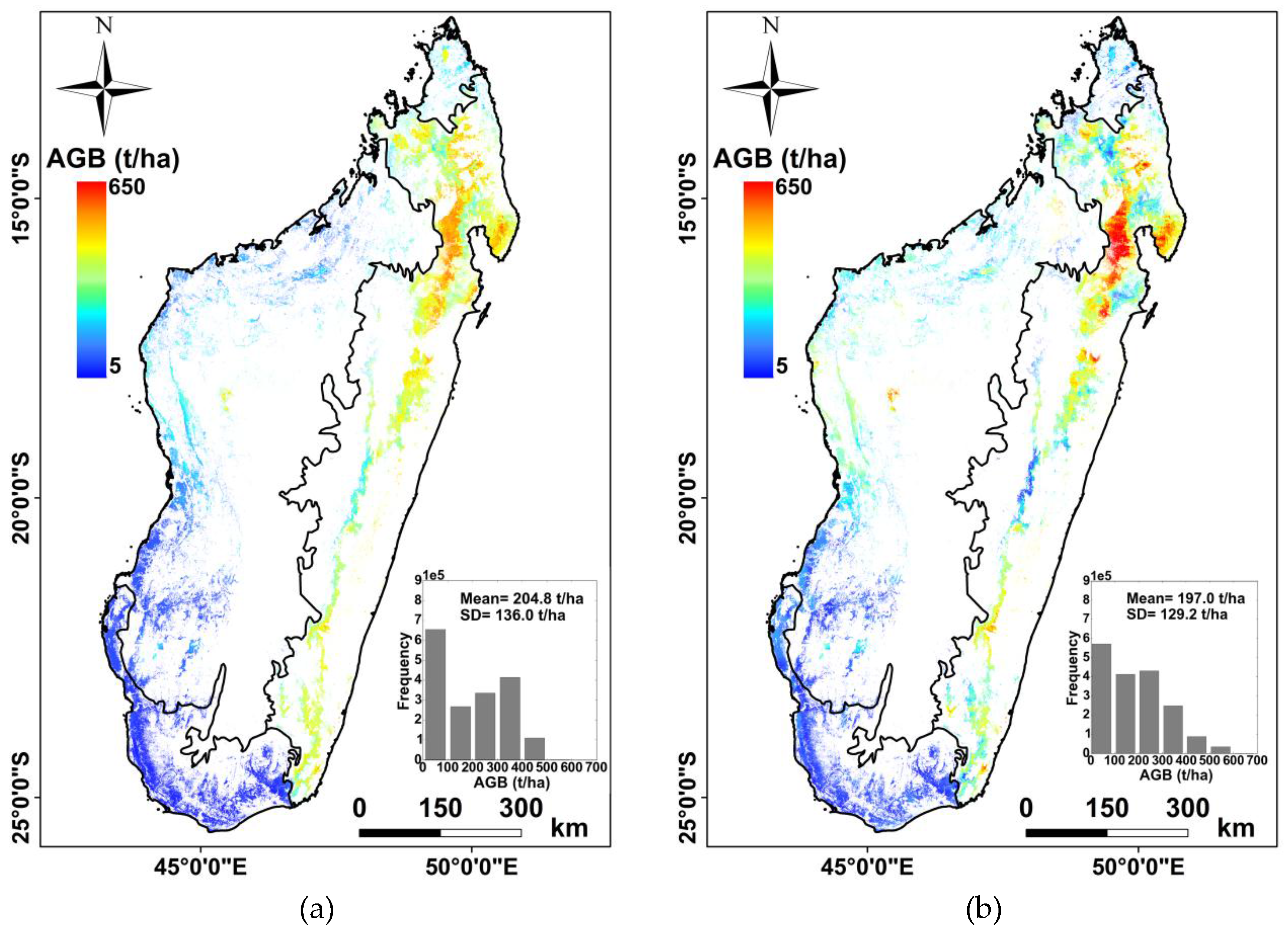
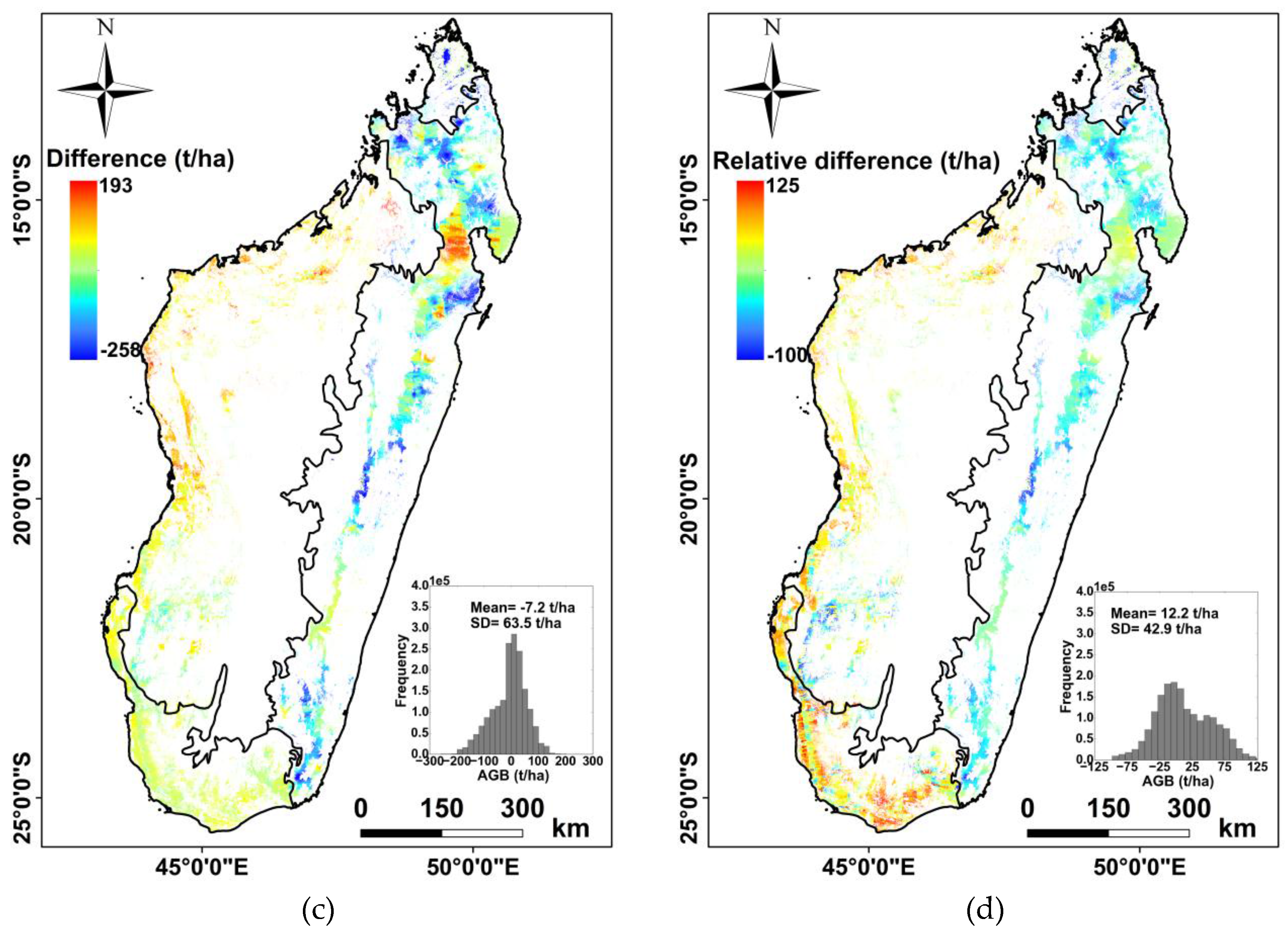
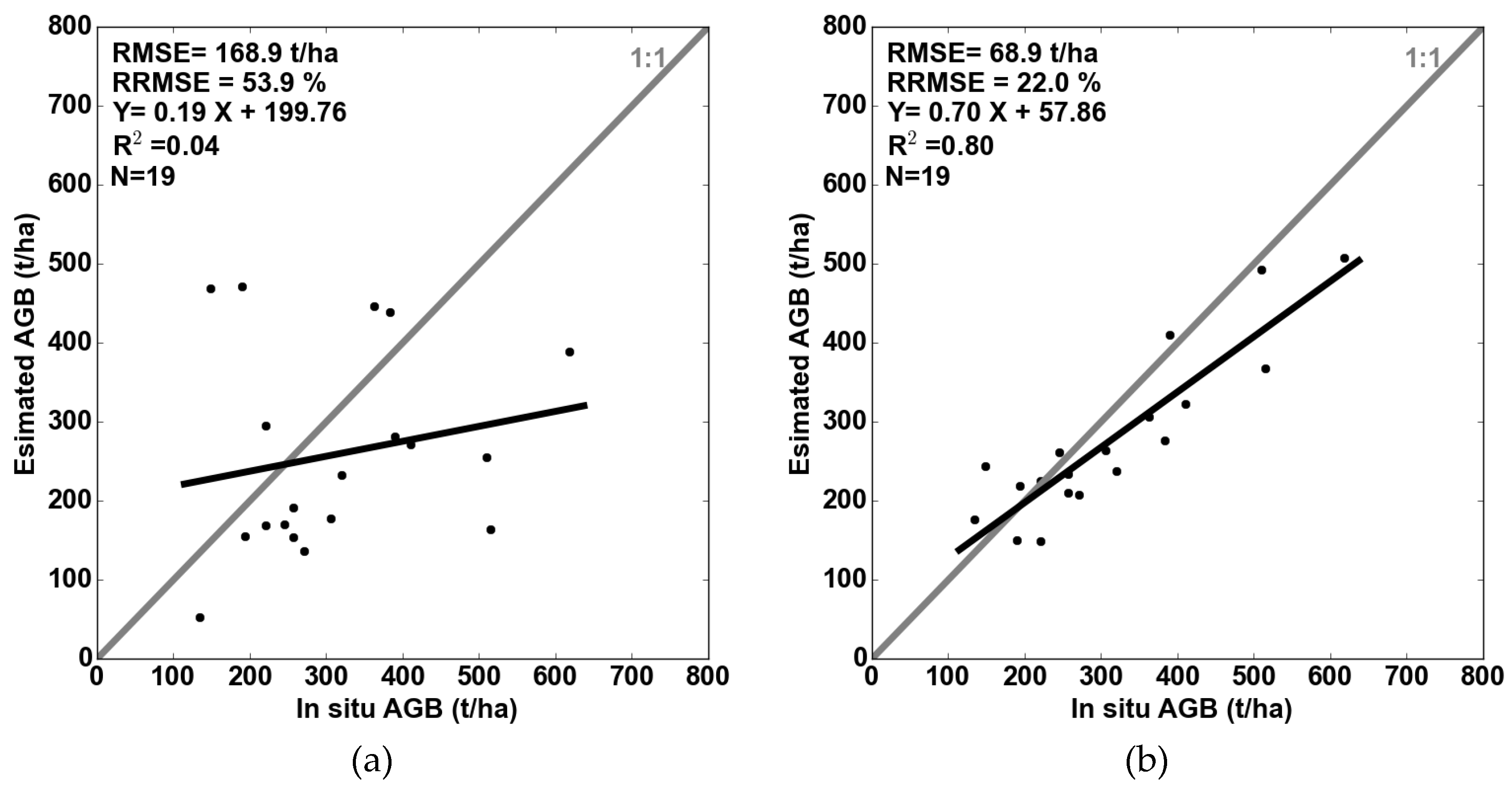
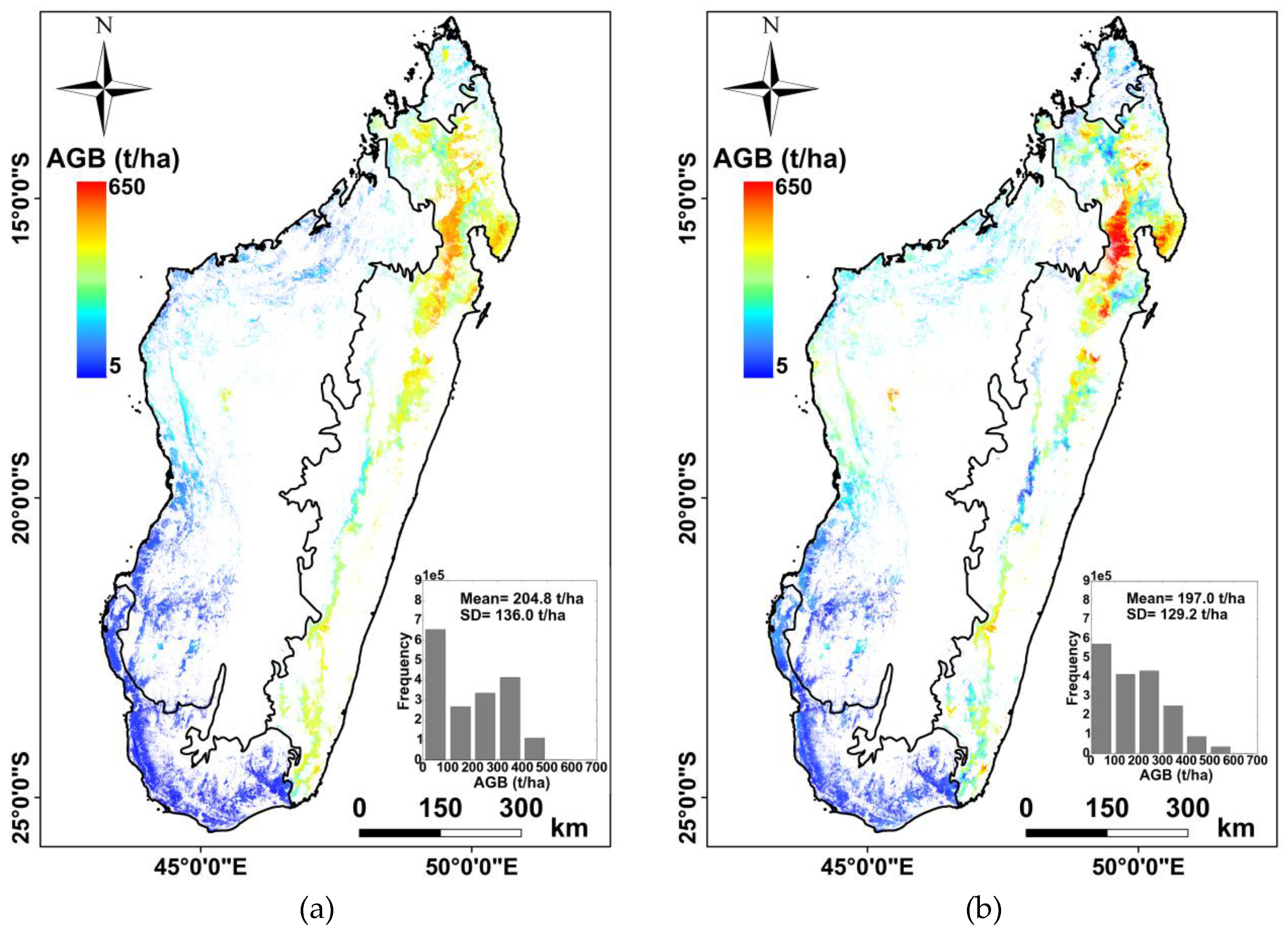
The results showed that the precision of the improved AGB map (RMSE = 74.1 t/ha, R2 = 0.71, N = 128) produced is better than that of the Vieilledent’s AGB map (RMSE = 81.0 t/ha, R2 = 0.62, N = 128). In addition, results showed that the improved AGB map allows higher estimates of AGB than Vieilledent’s AGB map. Indeed, the AGB values in the improved AGB map reach 650 t/ha, whereas the maximum AGB value in Vieilledent’s AGB map is 550 t/ha. For the improved AGB map, the number of AGB pixels (size = 250 m × 250 m) with a value higher than 550 t/ha is 13,241, covering an area of approximately 68,917 ha in the eastern ecoregion, out of which 61,865 ha represent one continuous forest stand located to the north of the eastern ecoregion.
Moreover, the results show that our approach provides more precise AGB estimates in comparison to the approaches proposed by Baccini et al. [
26] and Avitabile et al. [
39]. This is because the in situ AGB measurements used to calibrate the GLAS data, i.e., derive AGB from GLAS metrics, cover the range of all in situ AGB values. In addition, optical data that saturate at higher AGB values were not used in the procedure, which leads to the improvement in Vieilledent’s AGB map.
A limitation of our method is the unavailability of new GLAS data because ICESat ceased operations in 2009. However, this method could be applied to improve existing AGB maps constructed for forests before 2010 because data acquired by ICESat between 2003 and 2009 are free. The Global Ecosystem Dynamics Investigation LiDAR (GEDI) mission (launch date in 2019) will ensure LiDAR data with a smaller footprint (25 m) for better mapping of pan-tropical forests.
Finally, we assume that the nominal year of the improved AGB map is 2010 because we used the Vieilledent’s AGB map performed for the year of 2010, in addition to spaceborne LiDAR data acquired between 2003 and 2009.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}