1. Introduction
Inertial measurement sensors require smaller size, reliability, low cost and above all accuracy [
1]. MEMS technology is widely used in inertial sensors because MEMS gyros have the advantage of low cost, smaller size and easy fabrication in large numbers on a single chip [
2,
3]. However, these inertial sensors cannot provide highly accurate measurement for the space applications. The accuracy of individual MEMS gyroscope has reached its technology limit. In order to improve the accuracy without breakthrough on hardware, virtual gyroscope technology is presented and accepted by the industry [
4]. The method combines multiple gyroscopes to measure the same signal and get the best estimate with data fusion. A “virtual gyroscope” using a four-gyro array was proposed by Bayard and Ploen in [
4]. The simulation results showed that the gyroscopes with drifts of 8.66 °/h could be reduced to a virtual gyroscope with a drift of 0.062 °/h when the component gyroscopes are assumed to have a correlation factor of −0.33329. Another two-level optimal filtering method for fusing three gyroscopes was presented by Honglong Chang in [
5]. It achieved higher accuracy than individual gyroscope but the continuous-time Kalman filter was not solved to reveal the system property. Stubberud discussed the method of an extend Kalman filter of multiple sensors to improve the accuracy in [
6]. Al-Majed and Alsuwaidan presented a multi-filters adaptive estimator to improve the angular rate accuracy by using the noise correlation in [
7] but with no simulation or experimental results. Jiang and Xue used six-gyro array in [
8,
9,
10,
11]. They also adopted a novel optimal Kalman filter to combine the gyroscopes [
8]. Their further study used a first-order Markov process to model the rate signal to improve the performance in dynamic condition [
11].
Even the approaches mentioned above have been proven to improve the accuracy effectively, some errors occurring in one or several sensors of the virtual gyroscope may lead to severe accuracy degradation, even wrong results. The key of combining multiple gyroscopes to improve accuracy is the error modeling of individual gyroscope. In above approaches, the random walk, Markov process and Auto Regressive Moving Average (ARMA) were used. All these modeling methods assume that the measured time series has the statistical property at different time. Due to the small size and special structure, MEMS gyro is in fact very sensitive to the change of the surrounding environment. If the power consumption and surrounding temperature change, the statistical features of MEMS gyroscope random drift have big fluctuation. And it exhibits heteroskedasticity. The traditional time series analysis method is not suitable for modeling the random drift error with heteroskedasticity. Unlike the conventional method, Generalized Autoregressive Conditional Heteroskedasticity (GARCH) is able to handle the time series with heteroskedasticity.
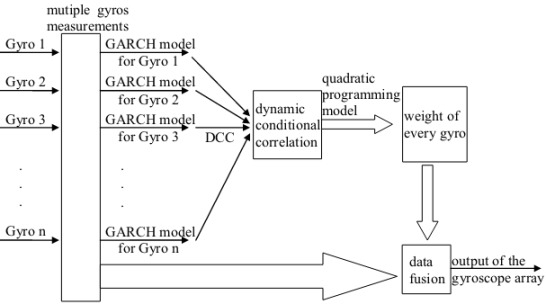
In this paper, based on dynamic conditional correlation (DCC) multivariate GARCH, a dynamic weighted multi-sensors data fusion algorithm is proposed. Firstly, the GARCH process is utilized to model the error of individual MEMS gyroscope. Then the DCC estimator is designed to calculate correlations between multivariate gyroscopes. The DCC estimator has the flexibility of multivariate GARCH but not the complexity. At last, based on the correlation, the optimal weight distribution principle for combining numerous MEMS gyroscope is derived by using quadratic programming. The experimental results show that this approach effectively reduces the noise and eliminates the influence of gyroscope faults.
The paper is organized as follows. The gyroscope error model used in this research is detailed in
Section 2. The correlation analysis of gyroscopes based on DCC Multivariate GARCH is derived in
Section 3. Mathematical models for combining MEMS Gyroscopes are deduced in
Section 4. Numerical experimental results are presented in
Section 5. Conclusions are drawn in
Section 6.
5. Experiments and Results
Six separate ADXRS300 [
20] gyroscopes were taken to construct a gyroscope array. A prototype of the virtual gyroscope is shown in
Figure 1.
The bandwidth of individual gyroscope is set to 40 Hz by choosing proper application circuit. To satisfy the Nyquist theorem, the sampling rate is set to 200 Hz. The original output signal of the ADXRS300 is a voltage proportional to angular rate. To obtain the output angular rate signal, we acquire the relationship between the output voltage of gyroscopes and input angular rates through the calibration, which is shown in
Figure 2. Then the output voltage is converted to the rate signal.
Figure 1.
Prototype of the virtual gyroscope.
Figure 1.
Prototype of the virtual gyroscope.
Figure 2.
Scale factor plot of the individual gyroscopes.
Figure 2.
Scale factor plot of the individual gyroscopes.
3600 observations are collected when the input angular rate maintains zero. Output rate signals of the individual gyroscopes are shown in
Figure 3. The experiments are performed at the room temperature (around 25 °C), meanwhile the gyros internal temperature, which is shown in
Figure 4, changes with time because of self-heating.
Figure 3.
Outputs of the individual gyroscopes.
Figure 3.
Outputs of the individual gyroscopes.
Figure 4.
Internal temperature of gyros
Figure 4.
Internal temperature of gyros
From
Figure 3, it can be seen that the error of Gyro 4 is for larger than usual, especially from 1000 s to 3600 s, while outputs of other gyroscopes appear normally. The environmental conditions of each gyro in the array are identical, so the output of Gyro 4 is not normal and the abnormality of Gyro 4 is due to internal fault. If Kalman filter or other conditional approaches to combining the gyroscopes are used, the accuracy will be decreased.
Autoregressive Conditional Heteroskedasticity (ARCH) effect is the precondition to apply GARCH model to the measured time series, so that ARCH effect test is necessary before gyroscopes are modeled. The commonly used method Lagrange multiplier (LM) proposed by Engle (1982) [
19] is applied to test the ARCH effect of outputs of gyroscopes. The test results under the condition of 1 lag interval are shown in
Table 1.
Table 1.
Test results of Autoregressive Conditional Heteroskedasticity (ARCH) effect.
Table 1.
Test results of Autoregressive Conditional Heteroskedasticity (ARCH) effect.
| Gyros | P-Value | LM-Statistic |
|---|
| Gyro 1 | 0.0000 | 138.0458 |
| Gyro 2 | 0.0000 | 284.1072 |
| Gyro 3 | 0.0000 | 835.0323 |
| Gyro 4 | 0.0000 | 1621.1489 |
| Gyro 5 | 0.0000 | 305.1508 |
| Gyro 6 | 0.0000 | 293.7068 |
Table 1 shows that the LM statistics of each gyroscope are larger than critical value, and the value of P is almost zero. Therefore, we reject the null hypothesis and ARCH effect is of certification in the measured time series of each single gyroscope, which means that the GARCH model can correctly describe the measured time series.
Therefore, we use GARCH model to combine the gyroscopes. Firstly, we determine the order of GARCH model. To reduce the complexity of model, p and q should be as small as possible. And in general case, GARCH (1, 1) model can feature the data well, so we choose GARCH (1, 1) to model individual gyroscopes. For the rolling window, the size of the window is set to be 360, and the movement speed of the window is set to be 30.
Obtaining conditional covariance matrix Ht is performed in two steps. Now first 360 observations are taken as example to estimate the parameters of GARCH.
Step 1: GARCH (1, 1) is used to model each gyroscope, which means that the parameters in Equation (11) are estimated under the condition of
p =
q = 1.The mean equation and variance equation can be given by:
, where
yt is the residuals of output rate signal of individual MEMS gyroscope. The estimated results of GARCH (1, 1) for individual gyroscope are shown in
Table 2. In this table, α
0 is the constant term in GARCH model according to Equation (1), α is the coefficient of past sample variances of MEMS gyroscopes, and β is the coefficient of lagged conditional variances of MEMS gyroscopes. In general, the outputs of each gyroscope accord with the assumptions of GARCH (1, 1).
Step 2: After Estimating the parameters in Equation (10) through ML method in Equation (13), a = 0.0310, b = 0.9484 are obtained, whose standard deviation are 1.57 × 10−5 and 0.0084. The results show that all dynamic correlation coefficient are greater than zero, which means that the correlation coefficient matrix and prophase influence have positive correlation. Moreover, the closer the value of b to 1, the greater correlation coefficient influenced by prophase part.
Table 2.
Estimated results of Generalized Autoregressive Conditional Heteroskedasticity (GARCH) (1, 1).
Table 2.
Estimated results of Generalized Autoregressive Conditional Heteroskedasticity (GARCH) (1, 1).
| Gyros | α0 | α | β |
|---|
| Value | Standard Deviation | Value | Standard Deviation | Value | Standard Deviation |
|---|
| Gyro 1 | 4.94 × 10−4 | 7.08 × 10−9 | 0.031432 | 1.57 × 10−5 | 0.685944 | 0.001411 |
| Gyro 2 | 1.07 × 10−4 | 4.32 × 10−9 | 0.039131 | 0.000914 | 0.904651 | 0.000235 |
| Gyro 3 | 1.43 × 10−4 | 8.16 × 10−9 | 0.086132 | 0.000565 | 0.865696 | 6.87 × 10−5 |
| Gyro 4 | 8.60 × 10−5 | 1.62 × 10−9 | 0.081163 | 3.24 × 10−5 | 0.916089 | 0.001028 |
| Gyro 5 | 1.28 × 10−4 | 1.89 × 10−9 | 0.039739 | 0.004628 | 0.906221 | 5.47 × 10−5 |
| Gyro 6 | 5.19 × 10−4 | 3.25 × 10−9 | 0.057514 | 0.001625 | 0.681433 | 0.000963 |
Meanwhile, according to the hypothesis test in Equation (14), P-value is 0 and chi-square value is 180.24. The chi-square test shows obvious statistical significance. So the null hypothesis H0 in Equation (14) is rejected and H1 is admitted, which means that there is dynamic time-varying relationship between multiple gyroscopes.
Then move the window and re-estimate the models. In every window, once all parameters in DCC have been estimated,
Ht and correlation coefficient matrix
Rt is also estimated, which is shown in
Figure 5 and
Figure 6, respectively. Due to
hij,t =
hji,t, ρ
ij,t = ρ
ji,t, ρ
ii,t = 1 (
i,
j = 1, 2, …, 6), only the curves of
hij,t (
i <
j) and ρ
ij,t (
i <
j) are given in the figures.
Then take
Ht in Equation (16) and solve the quadratic programming. The obtained weights are depicted in
Figure 7.
Figure 6.
Curve of dynamic correlation coefficient.
Figure 6.
Curve of dynamic correlation coefficient.
Figure 7.
Weights of the individual gyroscopes.
Figure 7.
Weights of the individual gyroscopes.
From
Figure 7, it can be seen that the weight of each gyroscope is time-varying, and the variation corresponds to conditional correlation coefficient. It is worth noting that the weight of Gyro 4 has a declining trend, as expected, especially near zero after 2500 s, which is relevant to the large error of Gyro 4. Because the error of Gyro 4 is larger than other gyros, the accuracy may be decreased when combining the gyroscopes to a virtual gyroscope with other approaches. However, with the method in this article, according to Equation (17), when the weight of the Gyro 4 is smaller, the influence of Gyro 4 on accuracy of virtual gyroscope is weaker. In addition, the weights are obtained through the model in
Section 4, and this model is used to obtain the weight of each gyroscope, which can minimize the conditional variance of the outputs from virtual gyroscope. So the accuracy can be improved more compared to the six gyroscopes when the weight of the Gyro 4 is smaller. It proves that the data fusion scheme can eliminate the influence of malfunction gyroscope in gyroscope array. Then the outputs of MEMS gyroscope can be combined by Equation (17). Finally, the outputs of virtual gyroscope are shown in
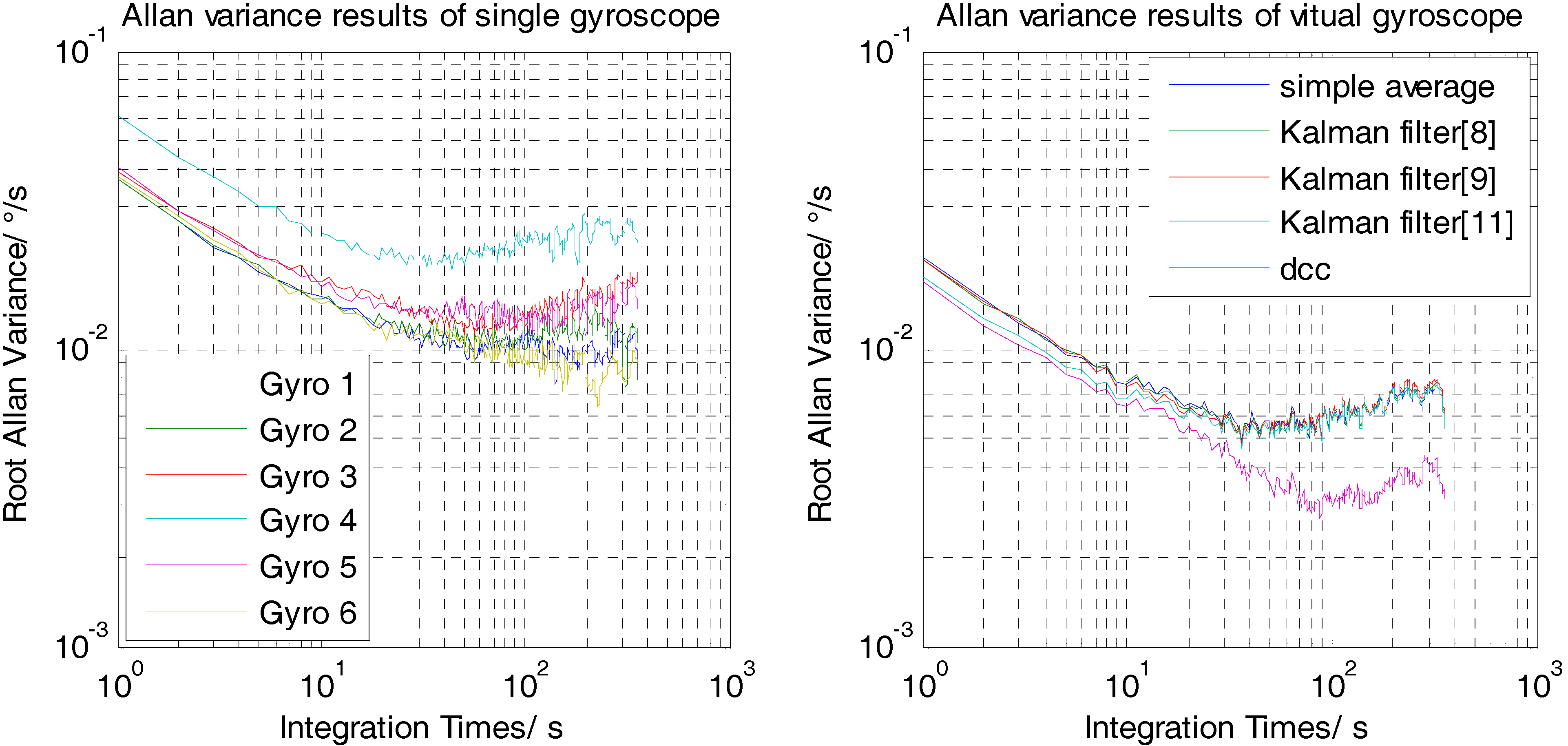
Figure 8. The comparisons of Allan variance measurements between the virtual gyro and single gyro are shown in
Figure 9. And the detailed results are illustrated in
Table 3. The simple average and the Kalman filter in [
8,
9,
11] are competitors. In this paper, the accuracy means the closeness between the results of measurement and the true angular rate, which can be represented by the amount of measurements errors. Then the standard deviation (1σ), the mean of the estimated errors, the angular random walk (ARW) noise and bias drift are used to evaluate the accuracy of the rate signal, thus the improvement factor is define as:
where
IFi is the improvement factor and
I refers to 1σ errors, mean, ARW noise and bias drift.
iSgyro is 1σ errors, mean, ARW noise or bias drift for the single gyroscope in the array, and
iVgyro is that for the virtual gyroscope. Alternatively, we use the average of the six gyroscopes to represent the single gyroscope here when calculate
IFi because the accuracy of the gyroscopes is different.
Table 3 shows that the 1σ estimated errors of gyroscopes are reduced from 0.0418–0.0545 °/s (except Gyro 4) to 0.0189–0.0231 °/s by five different models. Therefore, the performance improvement by these five different models is nearly equivalent, and the DCC multivariate GARCH has a slight edge.
However, in the view of mean, we know it increases from 0.0066–0.0110 °/s (except Gyro 4) to 0.0239–0.0243 °/s by simple average and Kalman filters, which indicates that these four models are out of work for performance improvement under the influence of Gyro 4. Compared with other models, the mean of virtual gyroscope combined by DCC model is reduced to 0.0047 °/s, so that the performance is also improved, and the improvement factor of the accuracy is about 5.17.
Figure 8.
Outputs of virtual gyroscope.
Figure 8.
Outputs of virtual gyroscope.
Figure 9.
Allan variance results of the virtual gyro compared to the single gyro.
Figure 9.
Allan variance results of the virtual gyro compared to the single gyro.
Table 3.
Experiments results.
Table 3.
Experiments results.
| Model | Mean (°/s) | 1σ (°/s) | ARW () | Bias Drift (°/h) |
|---|
| Gyro 1 | 0.0086 | 0.0418 | 1.74 | 38.02 |
| Gyro 2 | 0.0092 | 0.0436 | 1.74 | 38.88 |
| Gyro 3 | 0.0110 | 0.0545 | 1.86 | 42.52 |
| Gyro 4 | 0.1022 | 0.1051 | 2.94 | 73.19 |
| Gyro 5 | 0.0082 | 0.0484 | 1.85 | 47.02 |
| Gyro 6 | 0.0066 | 0.0446 | 1.73 | 32.78 |
| Simple average | 0.0243 | 0.0231 | 1.03 | 19.91 |
| Kalman filter [8] | 0.0240 | 0.0227 | 1.02 | 19.18 |
| Kalman filter [9] | 0.0239 | 0.0227 | 1.01 | 19.18 |
| Kalman filter [11] | 0.0239 | 0.0225 | 0.96 | 18.96 |
| DCC | 0.0047 | 0.0189 | 0.93 | 11.02 |
| IF of DCC | 5.17 | 2.98 | 2.13 | 4.09 |
From the Allan variance plot, both the ARW noise and bias drift are reduced by fusing multiple measurements from gyro array.
Table 3 reveals that the ARW noise of the gyroscope is reduced from 1.73–2.94
to 0.96–1.93
by simple average and Kalman filters. Meanwhile, the bias drift is reduced from 32.78–73.19 °/h to 18.96–19.91 °/h. The ARW noise and bias drift are reduced to 0.93
and 11.02 °/h by the DCC model, indicating a bias drift reduction factor of about 4.09, which is larger than the other models.
From the experimental results above, we find out that fusing multiple measurements from gyroscope array for accuracy improvement has higher reliability and effectiveness based on DCC model.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




