
A Novel Kalman Filter with State Constraint Approach for the Integration of Multiple Pedestrian Navigation Systems


Abstract
:1. Introduction
- First responders (e.g., emergency search and rescue personnel, police and military forces).
- Recreational users (e.g., self-guided tourists, hikers, athletic trainers).
- Other personnel (e.g., elderly people, visually impaired).
2. Literature Review and Problem Description
- Radio-navigation systems (GNSS, Cellular Networks).
- Indoor infrastructure-based systems (RFID, Wi-Fi, Bluetooth, UWB (Ultra-wideband)).
- MEMS sensor-based systems (inertial navigation system (INS), pedestrian dead reckoning (PDR)).
2.2. The Indoor Infrastructure-Based Systems
2.3. The Micro-Electro-Mechanical System (MEMS) Sensor Based Systems
2.4. The Multiple Systems Integration
3. State Constraint Kalman Filter (KF)
3.1. State Unconstrained KF
3.2. State Constrained KF
3.3. Maximum Probability Algorithm
3.4. The Solutions to the State Constrained KF
3.4.1. The State Linear Equality Constrained Solution
3.4.2. The State Linear Inequality Constrained Solution
3.4.3. The State Non-Linear Equality Constrained Solution
3.4.4. The State Non-Linear Inequality Constrained Solution
4. The Inertial Navigation System/Zero Velocity Update (INS/ZUPT) System
4.1. INS Mechanization
4.2. INS Error Model
4.3. INS Error Correction Using ZUPT
5. The Pedestrian Dead Reckoning/Global Navigation Satellite System (PDR/GNSS) System
5.1. PDR Mechanization
5.2. PDR Error Model
5.3. PDR Error State Correction Using GNSS
6. Information Fusion of Two Navigation Systems Using State Constraint KF
6.2. The Solution to the Constraint Problem
7. Results and Discussion Experimental Evaluation
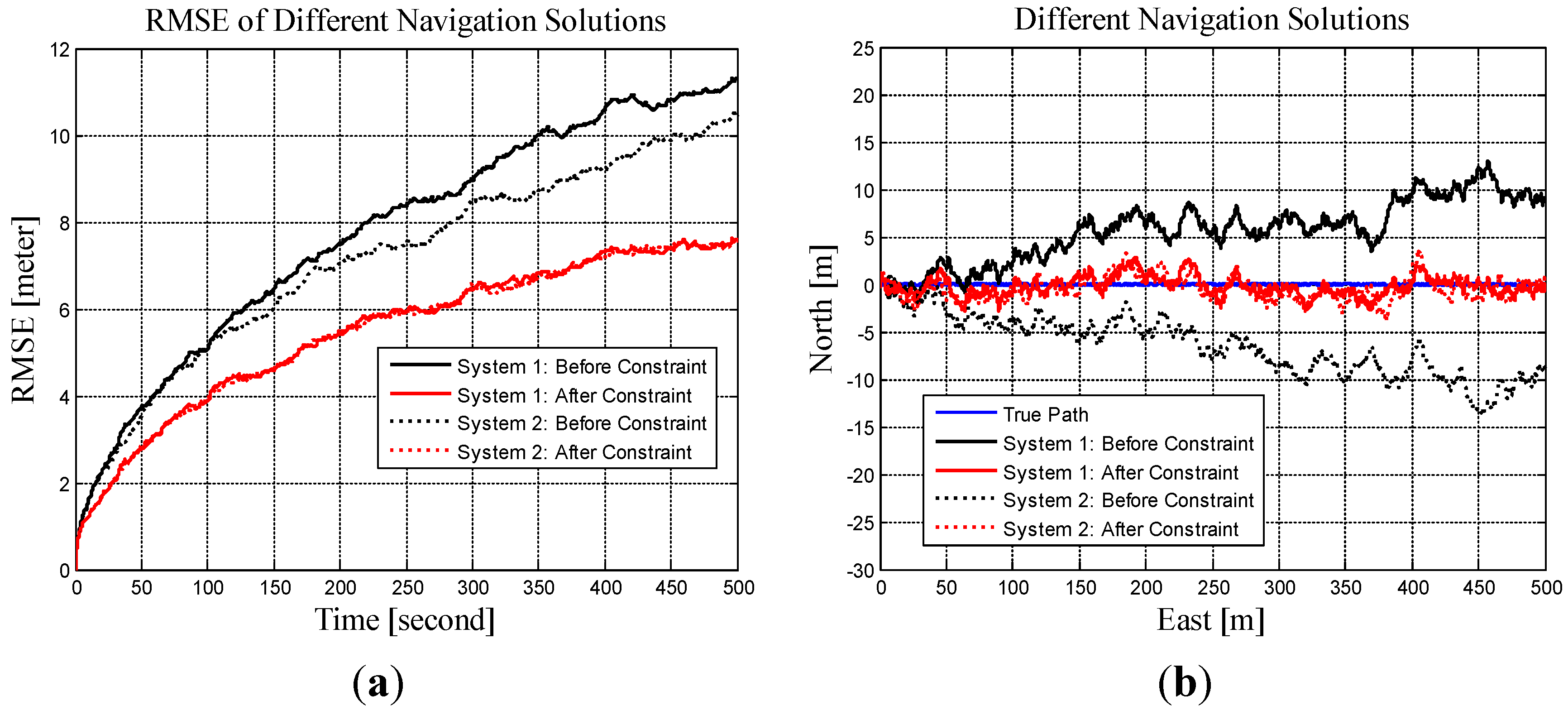
7.1. Monte Carlo Simulation


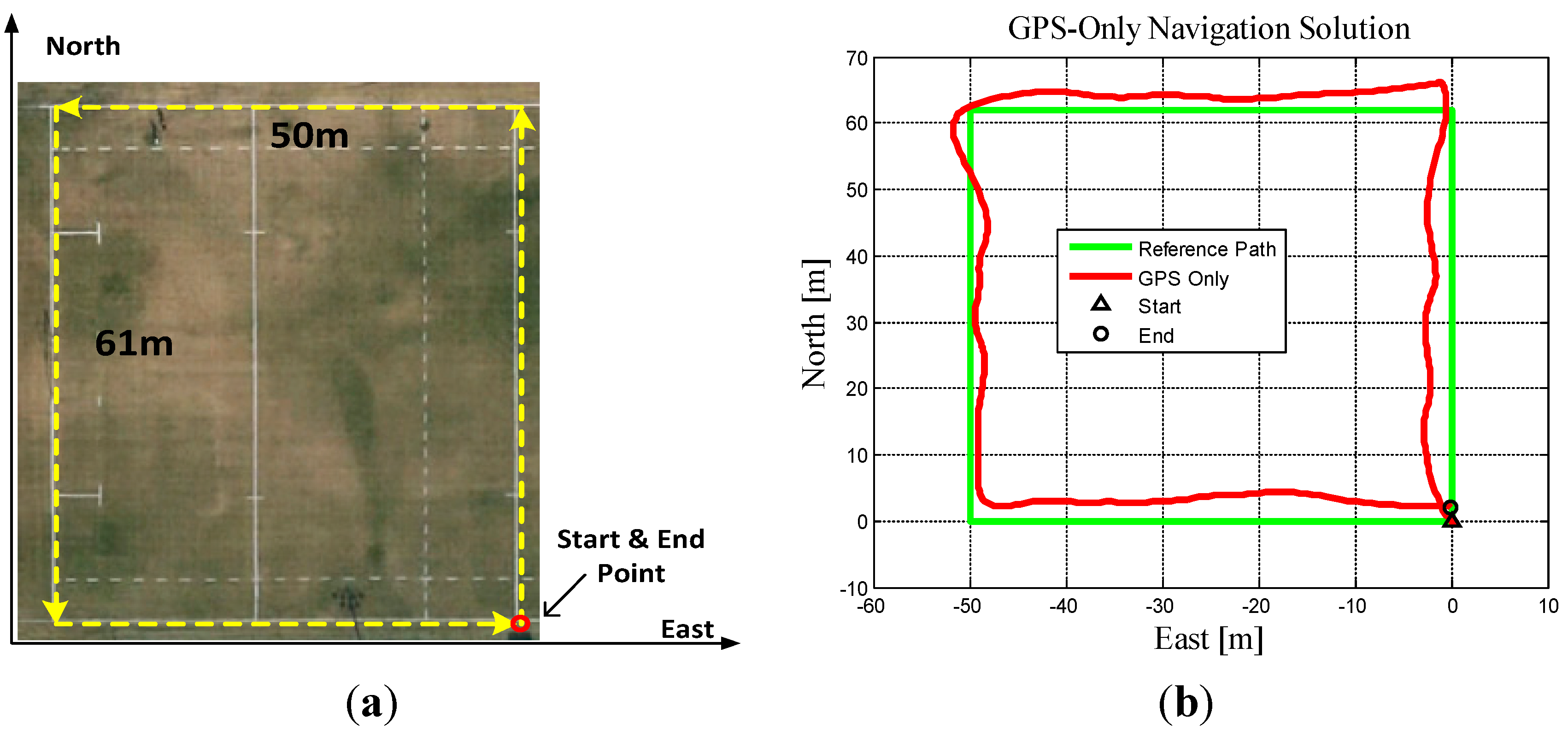
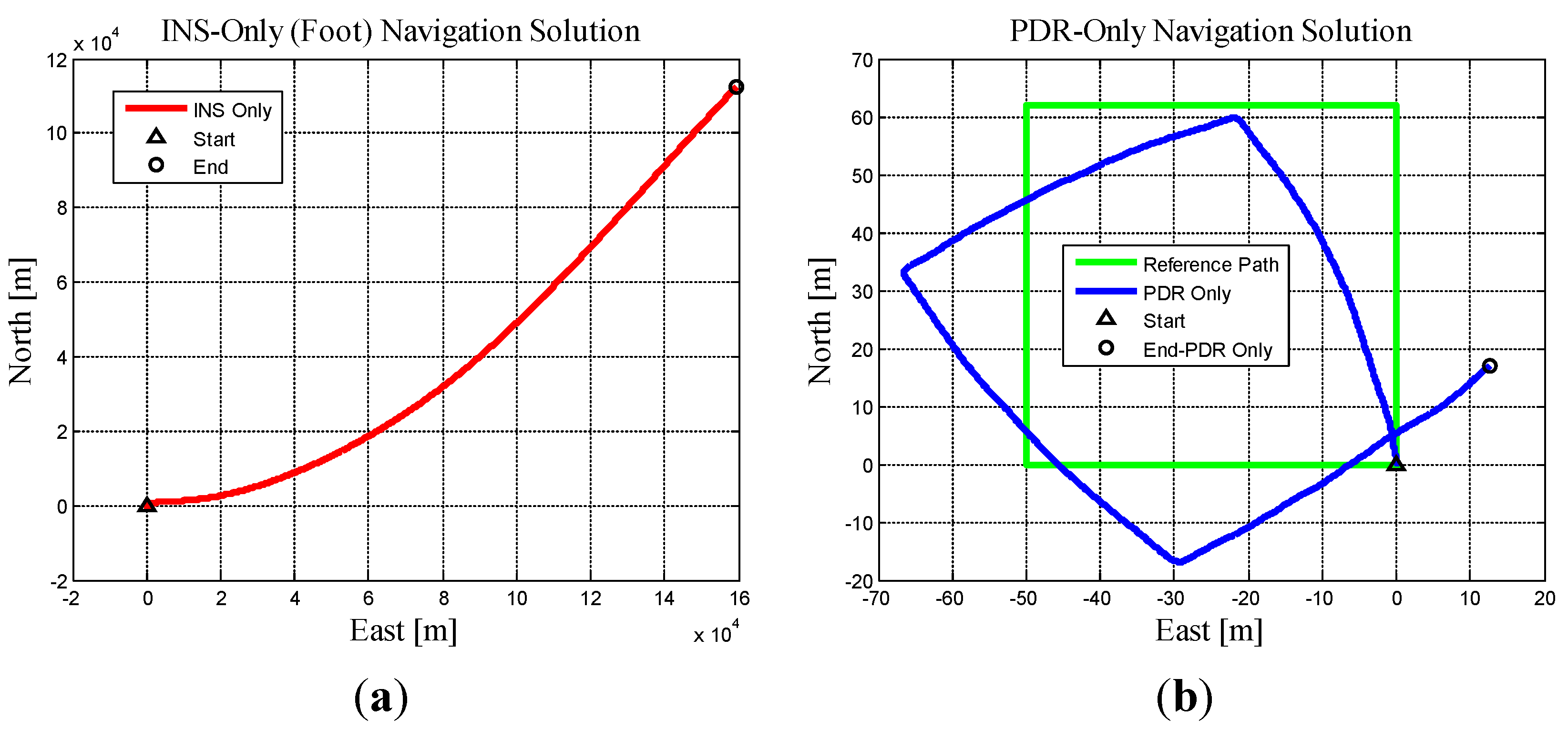
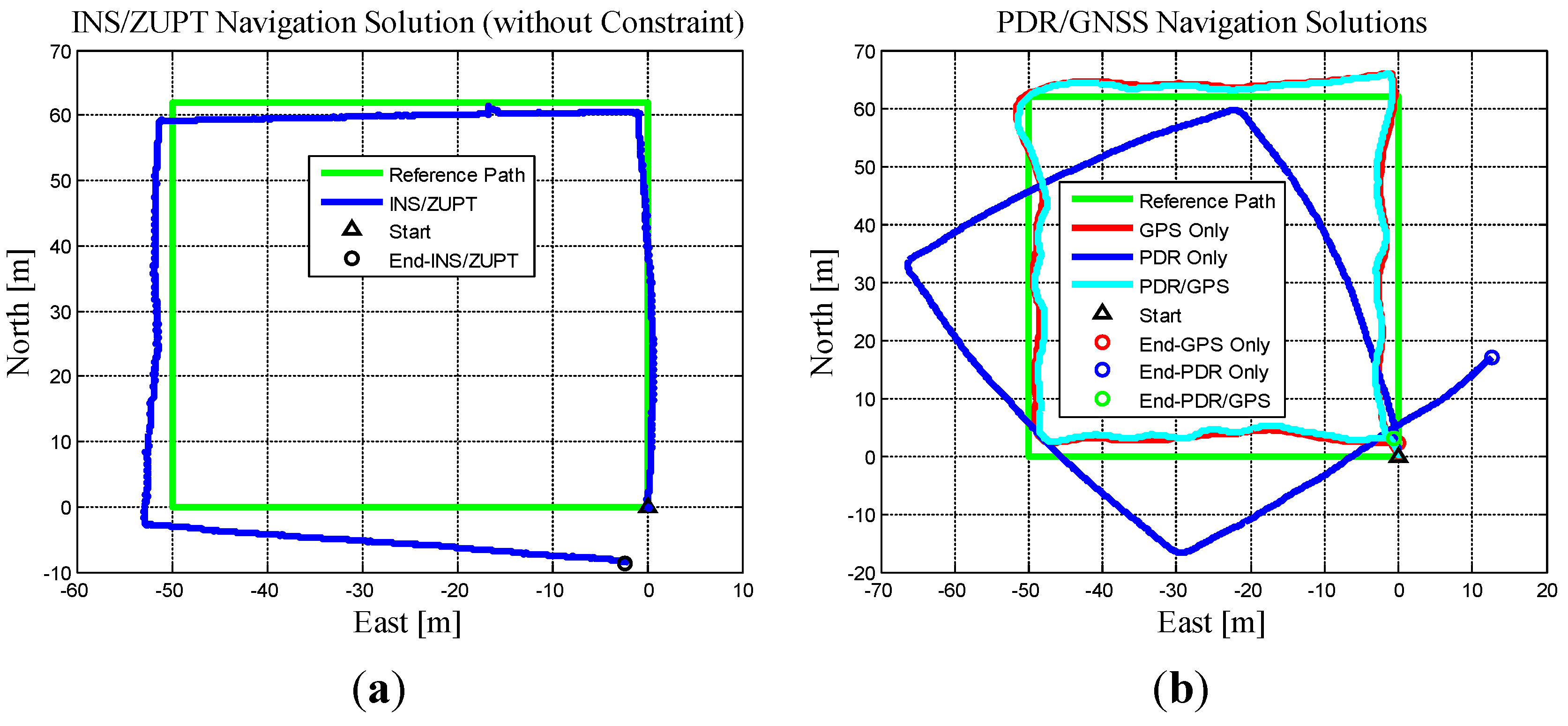
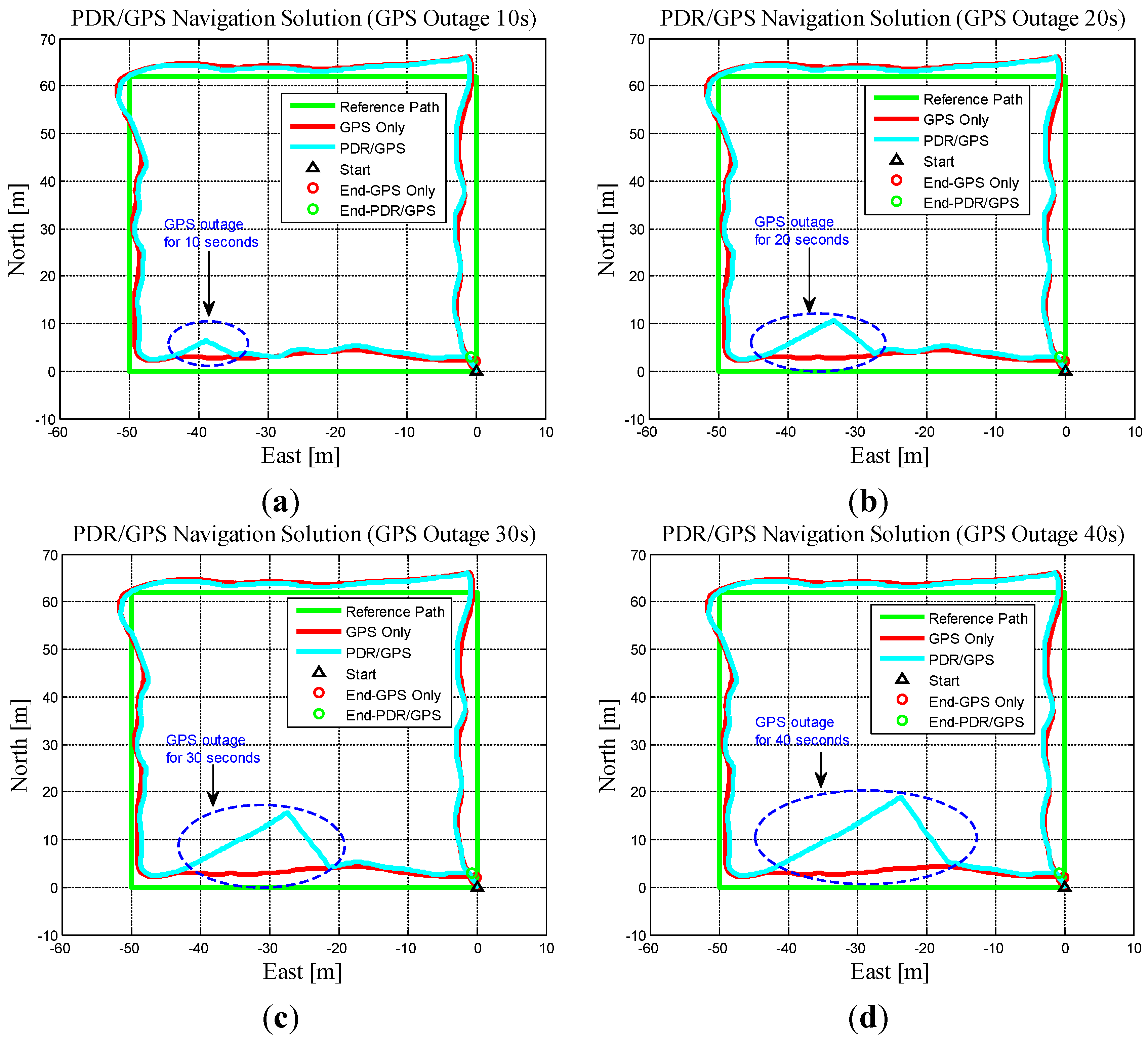
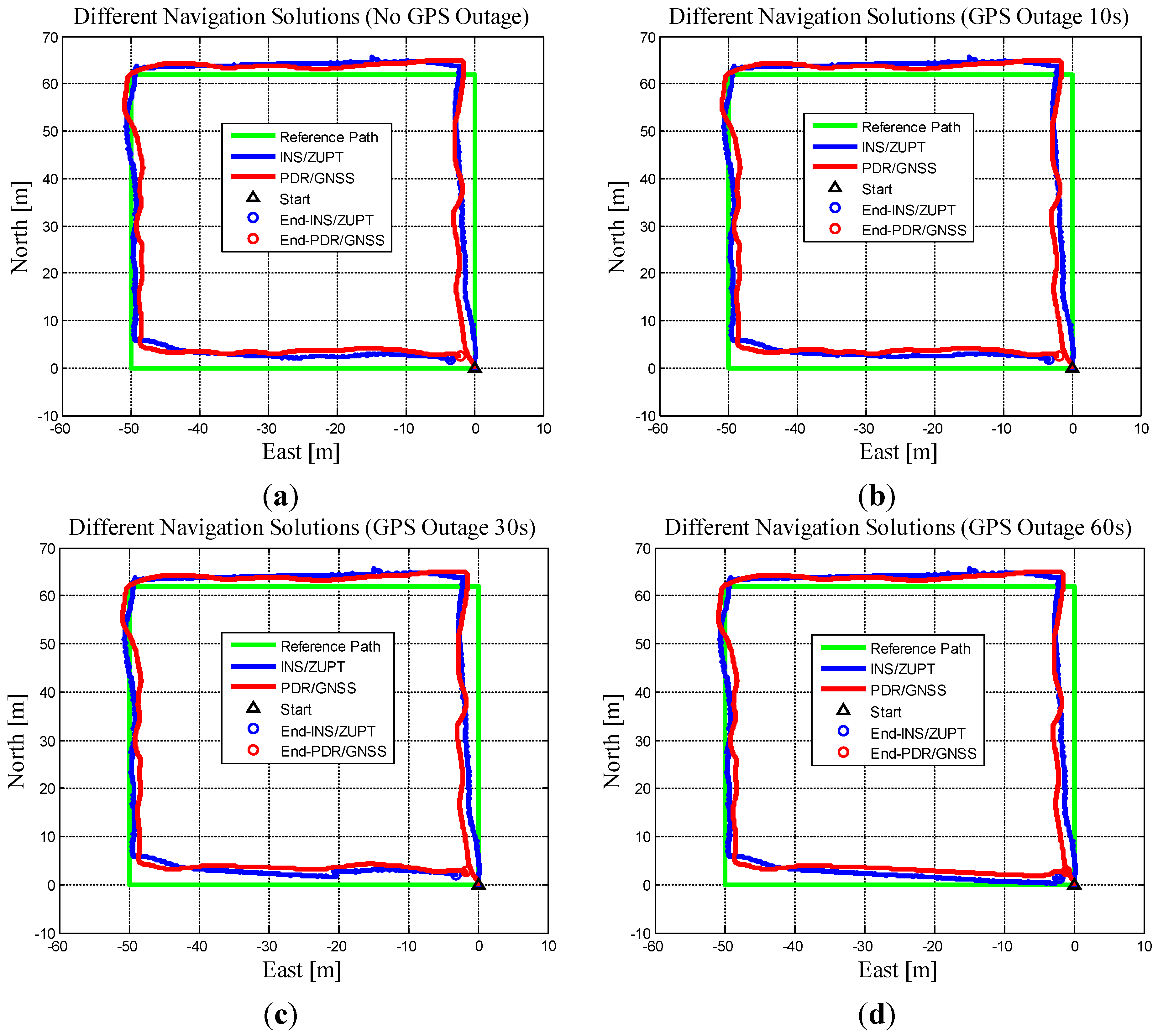
7.2. Experiments in Outdoor Environments




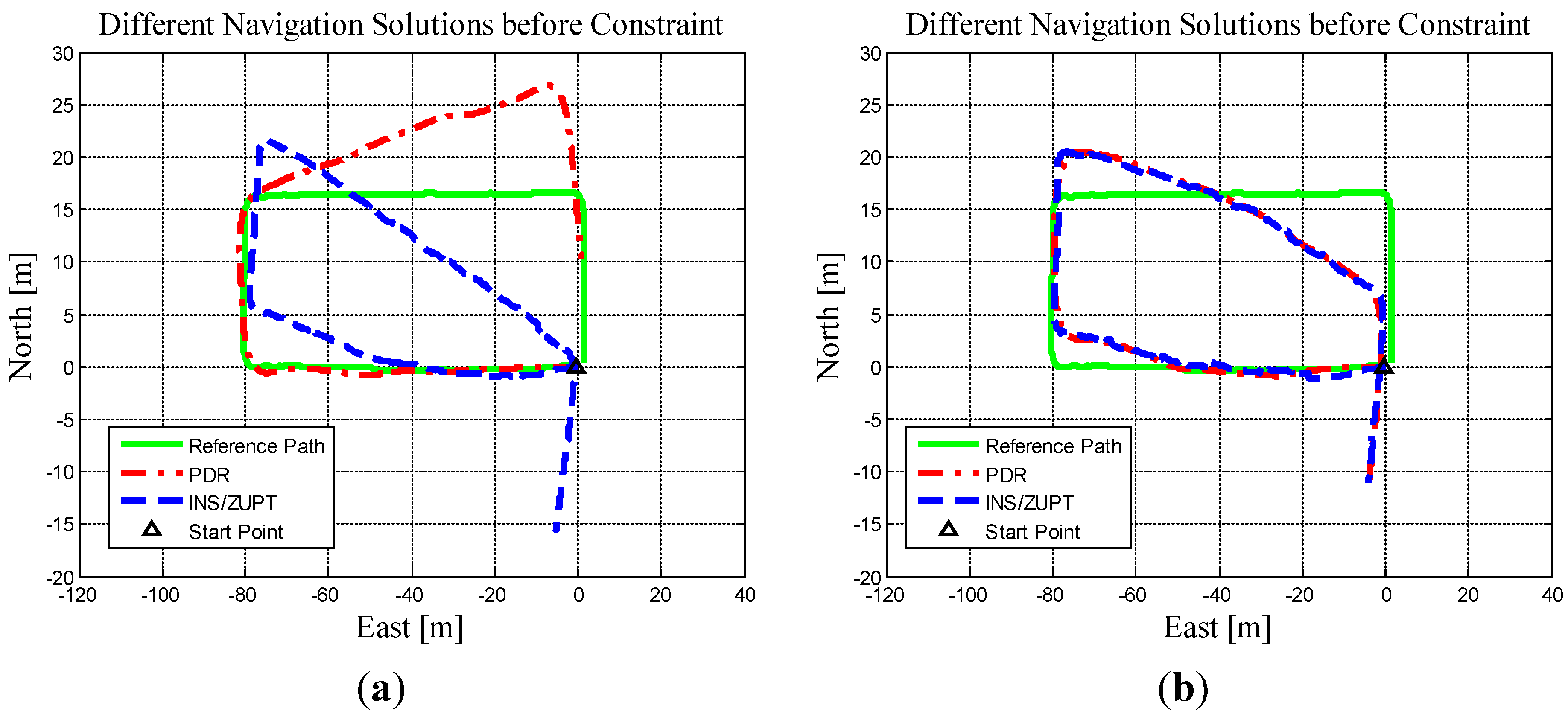
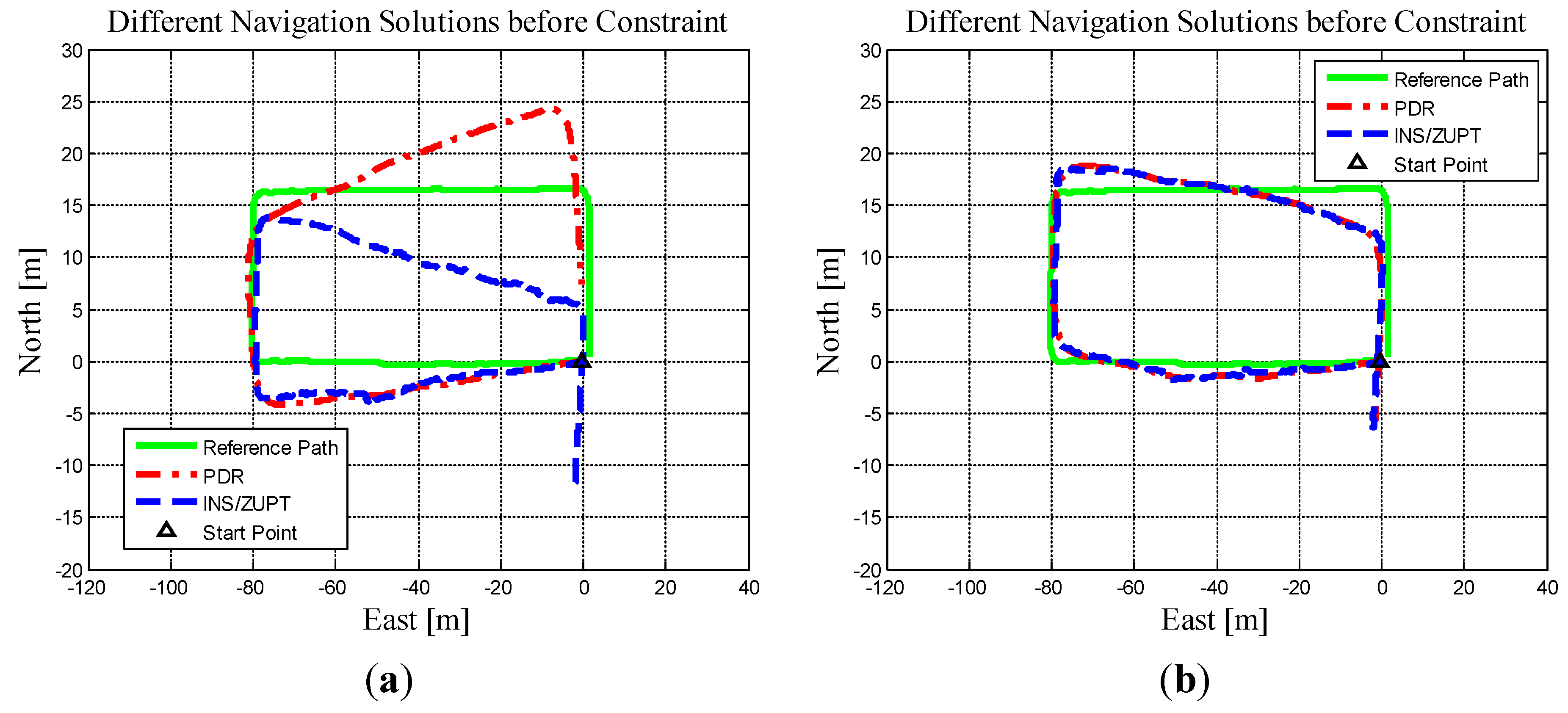
7.3. Experiments in Indoor Environments








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectory | System | Algorithm | Error (m) | |||
|---|---|---|---|---|---|---|
| Maximum | Minimum | Mean | RMS | |||
| Trajectory I | Hand-held | Before Constraint | 13.863 | 0.319 | 6.852 | 7.515 |
| After Constraint | 9.639 | 0.258 | 4.600 | 5.036 | ||
| Foot-Mounted | Before Constraint | 15.028 | 0.319 | 6.029 | 7.098 | |
| After Constraint | 9.882 | 0.319 | 4.652 | 5.077 | ||
| Trajectory II | Hand-held | Before Constraint | 8.149 | 0.541 | 3.607 | 4.149 |
| After Constraint | 6.778 | 0.872 | 2.704 | 2.978 | ||
| Foot-Mounted | Before Constraint | 14.838 | 0.039 | 5.394 | 6.641 | |
| After Constraint | 7.198 | 0.039 | 2.690 | 2.988 | ||
| Trajectory III | Hand-held | Before Constraint | 12.161 | 1.261 | 4.749 | 5.841 |
| After Constraint | 3.689 | 0.178 | 2.042 | 2.276 | ||
| Foot-Mounted | Before Constraint | 7.457 | 0.981 | 4.394 | 4.569 | |
| After Constraint | 3.720 | 0.194 | 2.098 | 2.326 | ||
| Trajectory IV | Hand-held | Before Constraint | 13.671 | 0.115 | 5.172 | 6.498 |
| After Constraint | 2.671 | 0.021 | 1.177 | 1.347 | ||
| Foot-Mounted | Before Constraint | 10.932 | 0.027 | 3.683 | 4.813 | |
| After Constraint | 2.857 | 0.074 | 1.171 | 1.313 | ||
| Trajectory V | Hand-held | Before Constraint | 15.825 | 0.043 | 5.730 | 7.414 |
| After Constraint | 6.606 | 0.043 | 2.583 | 3.210 | ||
| Foot-Mounted | Before Constraint | 1.791 | 0.014 | 0.716 | 0.832 | |
| After Constraint | 6.923 | 0.316 | 2.458 | 3.235 | ||
| Trajectory VI | Hand-held | Before Constraint | 20.319 | 0.011 | 8.409 | 10.123 |
| After Constraint | 5.390 | 0.011 | 2.425 | 2.689 | ||
| Foot-Mounted | Before Constraint | 12.869 | 0.295 | 3.686 | 5.555 | |
| After Constraint | 5.192 | 0.319 | 2.334 | 2.611 | ||
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rantakokko, J.; Strömbäck, P.; Emilsson, E.; Rydell, J. Soldier Positioning in Gnss-Denied Operations. In Proceedings of the Sensors and Electronics Technology Panel Symposium (SET-168) on Navigation Sensors and Systems in GNSS Denied Environments, Izmir, Turkey, 8–9 October 2012.
- Hepsaydir, E. Mobile Positioning in CDMA Cellular Networks. In Proceedings of the 50th Vehicular Technology Conference, Amsterdam, The Netherlands, 19–22 September 1999; pp. 795–799.
- Yamamoto, R.; Matsutani, H.; Matsuki, H.; Oono, T.; Ohtsuka, H. Position Location Technologies Using Signal Strength in Cellular Systems. In Proceedings of the 53rd Vehicular Technology Conference, Mexico City, Mexico, 6–9 May 2001; pp. 2570–2574.
- Hari, K.; Nilsson, J.-O.; Skog, I.; Händel, P.; Rantakokko, J.; Prateek, G. A prototype of a first-responder indoor localization system. J. Indian Inst. Sci. 2013, 93, 511–520. [Google Scholar]
- Ruiz, A.R.J.; Granja, F.S.; Honorato, J.C.P.; Rosas, J.I.G. Accurate pedestrian indoor navigation by tightly coupling foot-mounted IMU and RFID measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. Wifi-aided magnetic matching for indoor navigation with consumer portable devices. Micromachines 2015, 6, 747–764. [Google Scholar] [CrossRef]
- Shin, E.-H. Estimation Techniques for Low-Cost Inertial Navigation; UCGE Report No. 20219; University of Calgary: Calgary, Canada, 2005. [Google Scholar]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Computer Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Nilsson, J.-O.; Skog, I.; Händel, P. A Note on the Limitations of Zupts and the Implications on Sensor Error Modeling. In Proceeding of the 2012 International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012.
- Jirawimut, R.; Ptasinski, P.; Garaj, V.; Cecelja, F.; Balachandran, W. A method for dead reckoning parameter correction in pedestrian navigation system. IEEE Trans. Instrum. Meas. 2003, 52, 209–215. [Google Scholar] [CrossRef]
- Mezentsev, O.; Collin, J.; Lachapelle, G. Pedestrian dead reckoning—A solution to navigation in GPS signal degraded areas? Geomatica 2005, 59, 175–182. [Google Scholar]
- Lan, H.; Yu, C.; El-Sheimy, N. An Integrated PDR/GNSS Pedestrian Navigation System. In China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume III; Springer-Verlag: Berlin, Germany, 2015; pp. 677–690. [Google Scholar]
- Gabaglio, V.; Ladetto, Q.; van Seeters, J. Pedestrian Navigation Method and Apparatus Operative in a Dead Reckoning Mode. U.S. Patent No. 6,826,477, 23 April 2001. [Google Scholar]
- Beauregard, S.; Haas, H. Pedestrian dead reckoning: A basis for personal positioning. In Proceedings of the 3rd Workshop on Positioning, Navigation and Communication, Hannover, Germany, 16 March 2006; pp. 27–35.
- Renaudin, V.; Susi, M.; Lachapelle, G. Step length estimation using handheld inertial sensors. Sensors 2012, 12, 8507–8525. [Google Scholar] [CrossRef] [PubMed]
- Chang, H.-W.; Georgy, J.; El-Sheimy, N. Techniques for 3D Misalignments Calculation for Portable Devices in Cycling Applications. In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 2862–2867.
- Omr, M.; Georgy, J.; Noureldin, A. Using Multiple Sensor Triads for Enhanced Misalignment Estimation for Portable and Wearable Devices. In Proceedings of the Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 1146–1154.
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi integration based on handheld devices for indoor pedestrian navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef]
- Lan, H.; El-Sheimy, N. A State Constraint Kalman Filter for Pedestrian Navigation with Low Cost Mems Inertial Sensors. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 579–589.
- Brand, T.J.; Phillips, R.E. Foot-to-Foot Range Measurement as an Aid to Personal Navigation. In Proceedings of the 59th Annual Meeting of The Institute of Navigation and CIGTF 22nd Guidance Test Symposium, Albuquerque, NM, USA, 23–25 June 2003; pp. 113–121.
- Bancroft, J.B. Multiple Inertial Measurement Unit Integration for Pedestrian Navigation; UCGE Report No. 20320; University of Calgary: Calgary, Canada, 2010. [Google Scholar]
- Skog, I.; Nilsson, J.-O.; Zachariah, D.; Handel, P. Fusing the Information from Two Navigation Systems Using an Upper Bound on Their Maximum Spatial Separation. In Proceedings of the Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–5.
- Laverne, M.; George, M.; Lord, D.; Kelly, A.; Mukherjee, T. Experimental Validation of Foot to Foot Range Measurements in Pedestrian Tracking. In Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation, Portland, OR, USA, 20–23 September 2011.
- Zampella, F.; De Angelis, A.; Skog, I.; Zachariah, D.; Jiménez, A. A Constraint Approach for UWB and PDR Fusion. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, NSW, Australia, 13–15 November 2012.
- Simon, D.; Chia, T.L. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 128–136. [Google Scholar] [CrossRef]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Courier Dover Publications: Mineola, NY, USA, 2012. [Google Scholar]
- Fletcher, R. Practical Methods of Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Sun, F.; Lan, H.; Yu, C.; El-Sheimy, N.; Zhou, G.; Cao, T.; Liu, H. A robust self-alignment method for ship’s strapdown ins under mooring conditions. Sensors 2013, 13, 8103–8139. [Google Scholar] [CrossRef] [PubMed]
- El-Sheimy, N. Inertial Techniques and INS/DGPS Integration. In Engo 623-Course Notes; University of Calgary: Calgary, Canada, 2003; pp. 170–182. [Google Scholar]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-based Positioning and Their Integration; Springer-Verlag: Berlin, Germany, 2013. [Google Scholar]
- Fischer, C.; Talkad Sukumar, P.; Hazas, M. Tutorial: Implementation of a pedestrian tracker using foot-mounted inertial sensors. IEEE Pervasive Comput. 2012, 12, 17–27. [Google Scholar] [CrossRef]
- Jimenez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor Pedestrian Navigation Using an INS/EKF framework for Yaw Drift Reduction and a Foot-Mounted IMU. In Proceedings of the 2010 7th Workshop on Positioning Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 135–143.
- Godha, S.; Lachapelle, G. Foot mounted inertial system for pedestrian navigation. Meas. Sci. Technol. 2008, 19, 075202. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P.; Nilsson, J.-O.; Rantakokko, J. Zero-velocity detection—An algorithm evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Bao, H.; Wong, W.-C. A novel map-based dead-reckoning algorithm for indoor localization. J. Sens. Actuator Netw. 2014, 3, 44–63. [Google Scholar] [CrossRef]
- Gabaglio, V.; Ladetto, Q.; Merminod, B. Kalman filter approach for augmented GPS pedestrian navigation. Available online: http://quentin.ladetto.ch/publications/kalapproach.pdf (accessed on 12 July 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lan, H.; Yu, C.; Zhuang, Y.; Li, Y.; El-Sheimy, N. A Novel Kalman Filter with State Constraint Approach for the Integration of Multiple Pedestrian Navigation Systems. Micromachines 2015, 6, 926-952. https://doi.org/10.3390/mi6070926
Lan H, Yu C, Zhuang Y, Li Y, El-Sheimy N. A Novel Kalman Filter with State Constraint Approach for the Integration of Multiple Pedestrian Navigation Systems. Micromachines. 2015; 6(7):926-952. https://doi.org/10.3390/mi6070926
Chicago/Turabian StyleLan, Haiyu, Chunyang Yu, Yuan Zhuang, You Li, and Naser El-Sheimy. 2015. "A Novel Kalman Filter with State Constraint Approach for the Integration of Multiple Pedestrian Navigation Systems" Micromachines 6, no. 7: 926-952. https://doi.org/10.3390/mi6070926
APA StyleLan, H., Yu, C., Zhuang, Y., Li, Y., & El-Sheimy, N. (2015). A Novel Kalman Filter with State Constraint Approach for the Integration of Multiple Pedestrian Navigation Systems. Micromachines, 6(7), 926-952. https://doi.org/10.3390/mi6070926