An Improved Phase-Robust Configuration for Vibration Amplitude-Phase Extraction for Capacitive MEMS Gyroscopes


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Analysis
2.1. Analytical Study on Amplitude and Phase Information Extraction Using DSB and SSB Configurations
2.2. Influence of Interface Circuit Phase Variation θCV on Gyroscope Performance Using DSB and SSB
2.2.1. Using DSB Configuration
2.2.2. Using SSB Configuration
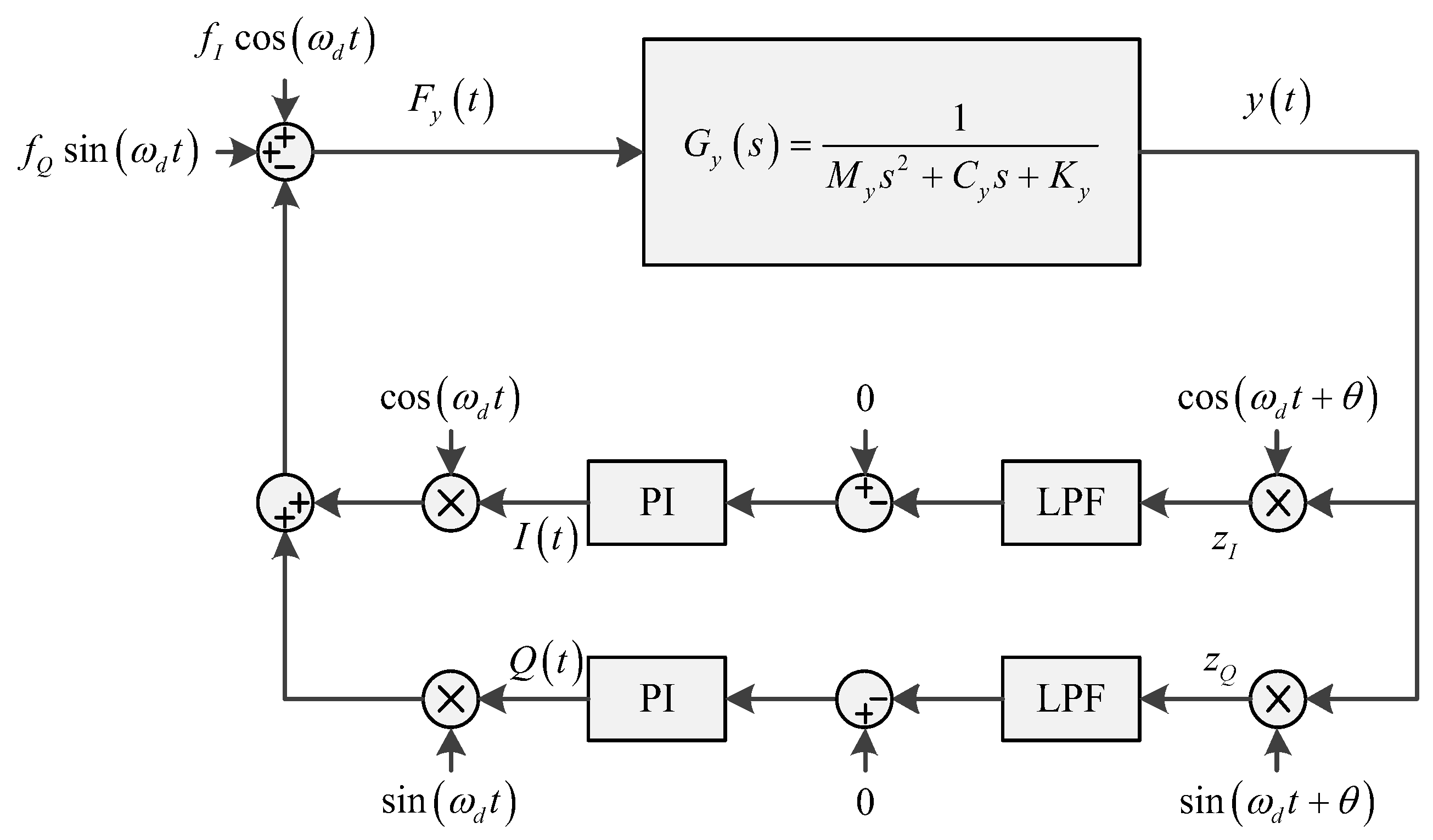
3. Robust Amplitude and Phase Extraction Configuration
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhou, B.; Zhang, R.; Chen, Z. Online self-compensation for enhanced the scale factor stability of a micromachined gyroscope. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2009; Volume 188. [Google Scholar]
- Raman, J.; Cretu, E.; Rombouts, P.; Weyten, L. A closed-loop digitally controlled mems gyroscope with unconstrained sigma-delta force-feedback. IEEE Sens. J. 2009, 9, 297–305. [Google Scholar] [CrossRef] [Green Version]
- Geiger, W.; Butt, W.U.; Gaißer, A.; Frech, J.; Braxmaier, M.; Link, T.; Kohne, A.; Nommensen, P.; Sandmaier, H.; Lang, W. Decoupled microgyros and the design principle daved. Sens. Actuators A Phys. 2002, 95, 239–249. [Google Scholar] [CrossRef]
- Tatar, E.; Alper, S.E.; Akin, T. Quadrature-error compensation and corresponding effects on the performance of fully decoupled mems gyroscopes. J. Microelectromech. Syst. 2012, 21, 656–667. [Google Scholar] [CrossRef]
- Wu, J.; Fedder, G.K.; Carley, L.R. A low-noise low-offset chopper-stabilized capacitive-readout amplifier for CMOS MEMS accelerometers. In Proceedings of the 2002 IEEE International Solid-State Circuits Conference. Digest of Technical Papers, San Francisco, CA, USA, 7 February 2002; Volume 1, pp. 428–478. [Google Scholar]
- Sutri, N.Y.; Dennis, J.O.; Khir, M.H.M.; Tang, T.B.; Mian, M.U. Low-noise, low-offset modulator demodulator circuit for chopper stabilization technique in CMOS-MEMS sensor applications. In Proceedings of the 2014 5th International Conference on Intelligent and Advanced Systems (ICIAS), Kuala Lumpur, Malaysia, 3–5 June 2014; pp. 1–5. [Google Scholar]
- Shiah, J.; Mirabbasi, S. A 5-V 290-μW low-noise chopper-stabilized capacitive-sensor readout circuit in 0.8-μm CMOS using a correlated-level-shifting technique. IEEE Trans. Circuits Syst. II Express Briefs 2017, 61, 254–258. [Google Scholar] [CrossRef]
- Liu, Y.X.; Feng, W.L.; He, C.H.; Wang, L.; Dong, L.G.; Zhao, Q.C.; Yang, Z.C.; Yan, G.Z. Design of a digital closed control loop for the sense mode of a mode-matching MEMS vibratory gyroscope. In Proceedings of the 9th IEEE International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Waikiki Beach, HI, USA, 13–16 April 2014; pp. 199–203. [Google Scholar]
- Wang, X.; Li, H.; Yang, B.; Huang, L.; Wang, S. A prototype of MEMS gyroscope based on digital control. In International Conference on Automatic Control and Artificial Intelligence; IET: Stevenage, UK, 2013; pp. 275–278. [Google Scholar]
- Zhu, H.; Jin, Z.; Hu, S.; Liu, Y. Constant-frequency oscillation control for vibratory micro-machined gyroscopes. Sens. Actuators A Phys. 2013, 193, 193–200. [Google Scholar] [CrossRef]
- Zotov, S.A.; Prikhodko, I.P.; Trusov, A.A.; Shkel, A.M. Frequency modulation based angular rate sensor. In Proceedings of the 2011 IEEE 24th International Conference on Micro Electro Mechanical Systems, Cancun, Mexico, 23–27 January 2011; pp. 577–580. [Google Scholar]
- Zheng, X.; Jin, Z.; Wang, Y.; Zhang, X.; Hu, S.; Xu, L. Process flow improvement on a bulk micromachined gyroscope. Micro Nano Lett. 2009, 4, 34–38. [Google Scholar] [CrossRef]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Liu, S.; Lin, Y.; Wu, H.; Teng, L.; Jin, Z. An Improved Phase-Robust Configuration for Vibration Amplitude-Phase Extraction for Capacitive MEMS Gyroscopes. Micromachines 2018, 9, 362. https://doi.org/10.3390/mi9070362
Zheng X, Liu S, Lin Y, Wu H, Teng L, Jin Z. An Improved Phase-Robust Configuration for Vibration Amplitude-Phase Extraction for Capacitive MEMS Gyroscopes. Micromachines. 2018; 9(7):362. https://doi.org/10.3390/mi9070362
Chicago/Turabian StyleZheng, Xudong, Siqi Liu, Yiyu Lin, Haibin Wu, Lai Teng, and Zhonghe Jin. 2018. "An Improved Phase-Robust Configuration for Vibration Amplitude-Phase Extraction for Capacitive MEMS Gyroscopes" Micromachines 9, no. 7: 362. https://doi.org/10.3390/mi9070362
APA StyleZheng, X., Liu, S., Lin, Y., Wu, H., Teng, L., & Jin, Z. (2018). An Improved Phase-Robust Configuration for Vibration Amplitude-Phase Extraction for Capacitive MEMS Gyroscopes. Micromachines, 9(7), 362. https://doi.org/10.3390/mi9070362