New Detector Sensitivity Calibration and the Calculation of the Interaction Force between Particles Using an Optical Tweezer



Abstract
:1. Introduction
2. Materials and Methods
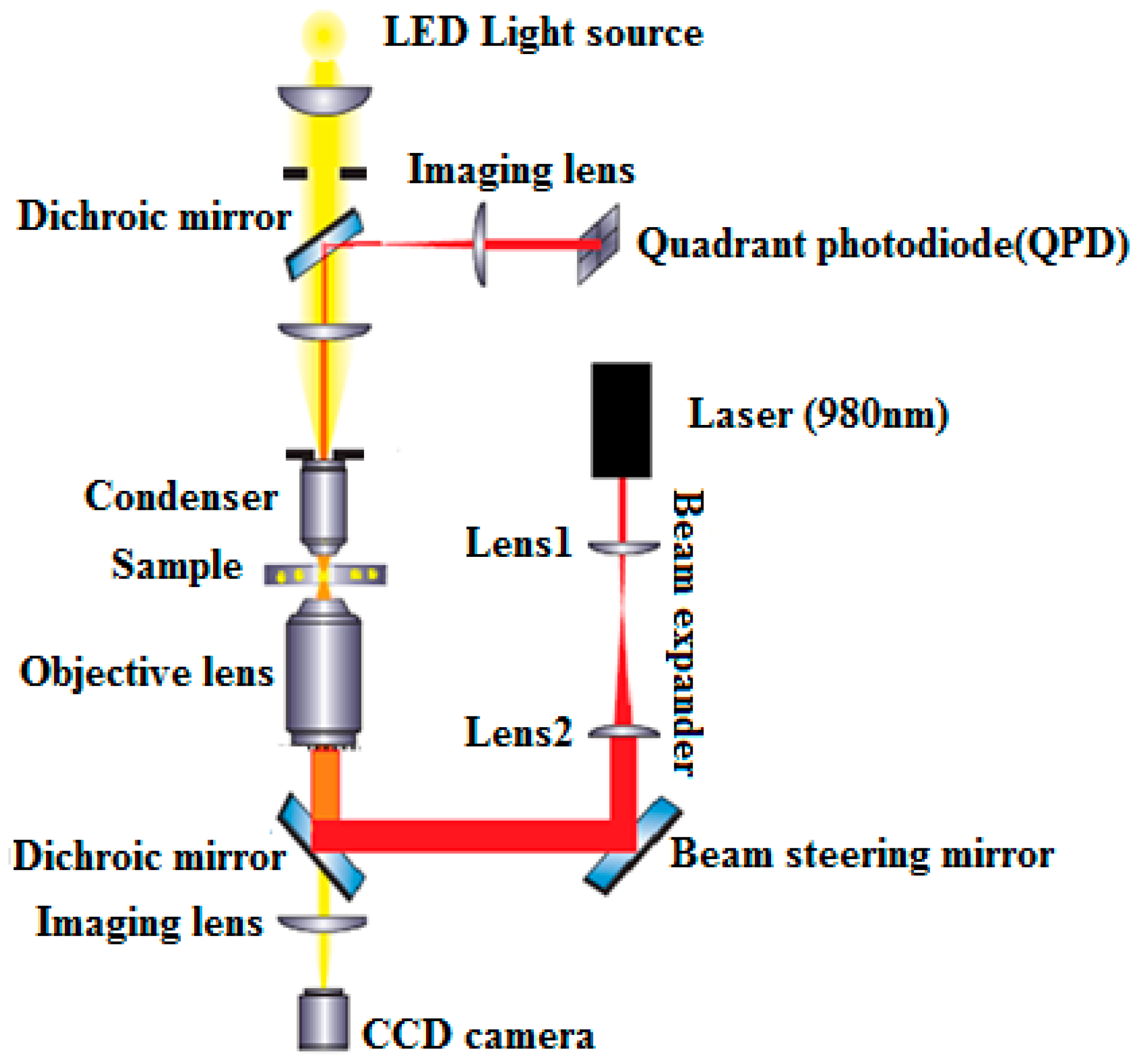
2.1. Experimental Setup
2.2. Methods
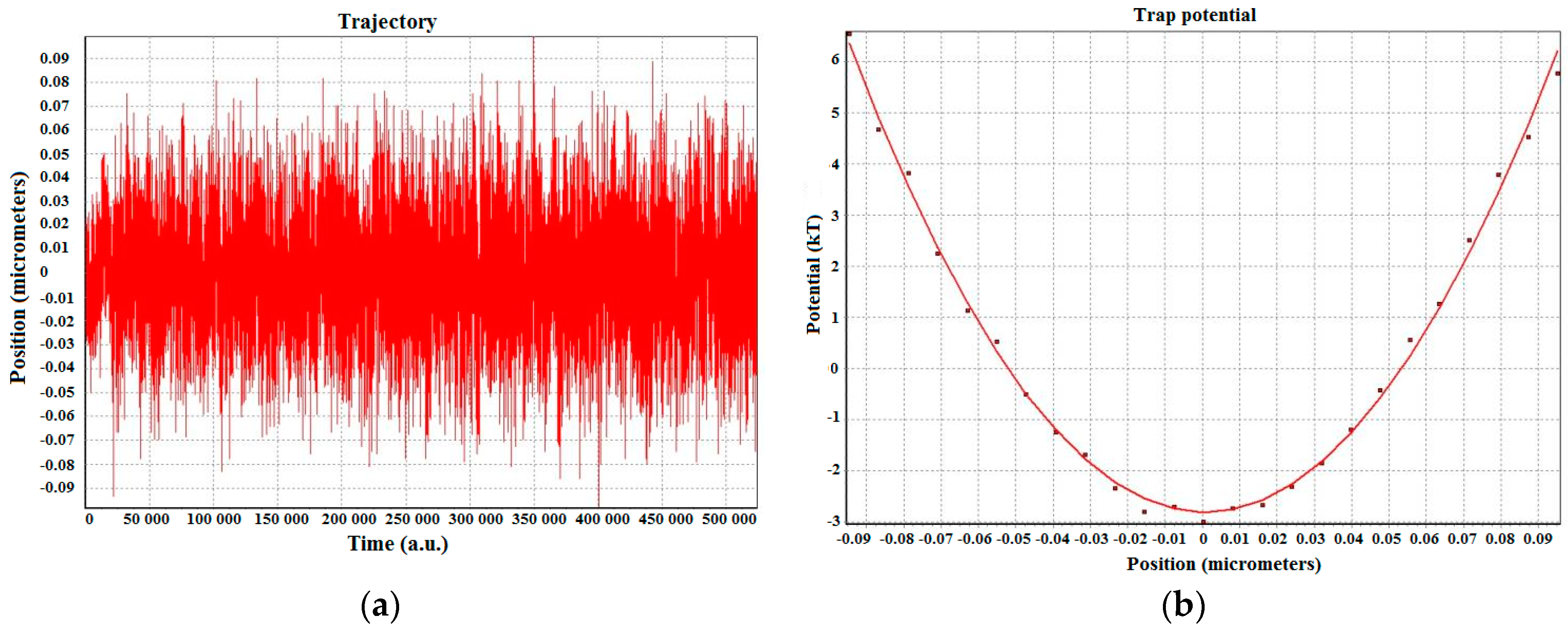
2.2.1. Force Calibration
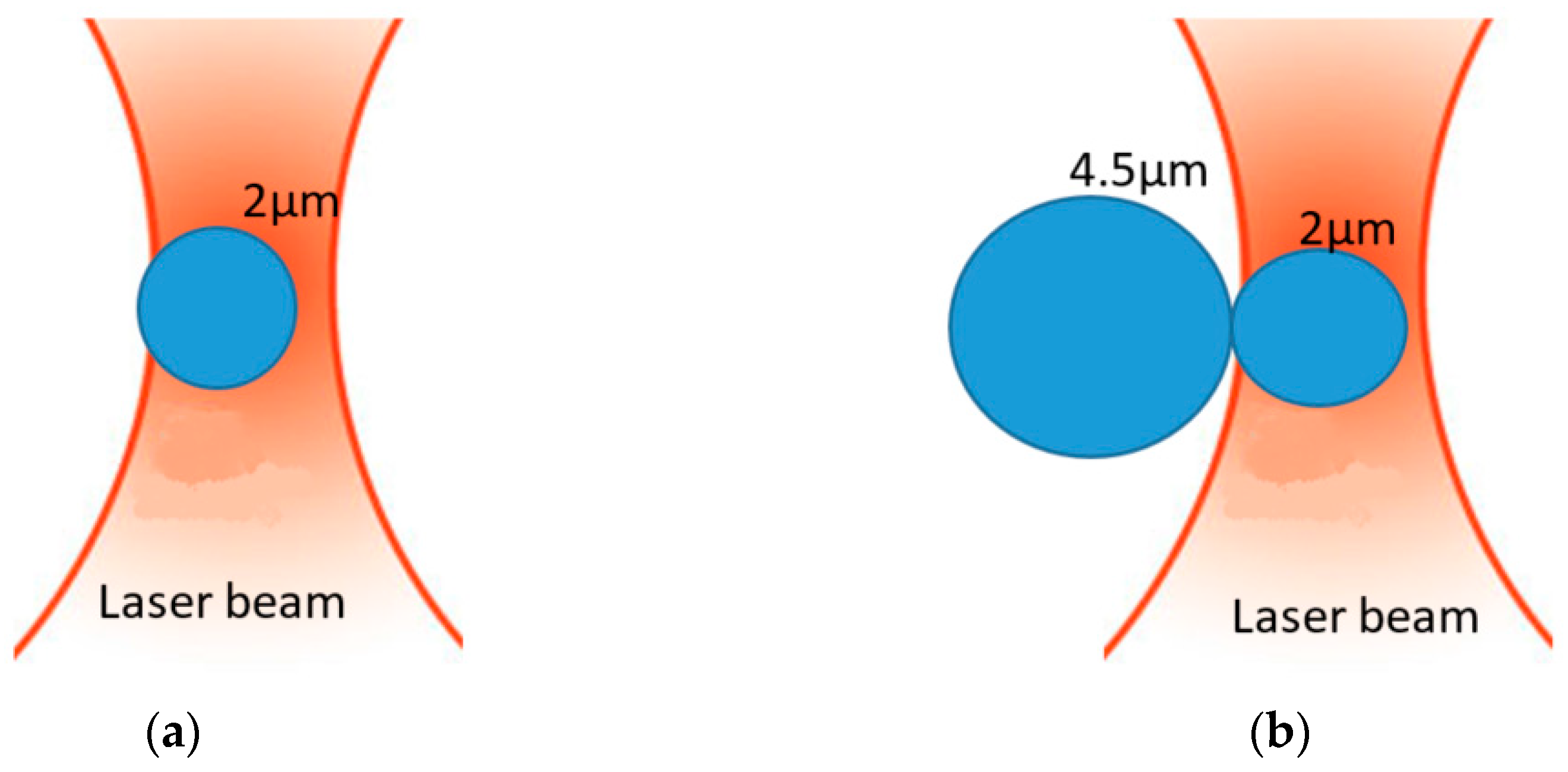
2.2.2. How to Calculate the Contact Force?
2.2.3. Position Detection by Particle Tracking
3. Results and Discussion
3.1. Detector Sensitivity Calculation
3.2. Determination of the Force Contact between Two Silica Beads
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ashkin, A.; Dziedzic, J.M.; Yamane, T. Optical trapping and manipulation of single cells using infrared laser beams. Nature 1987, 330, 769–771. [Google Scholar] [CrossRef] [PubMed]
- Grier, D.G.; Murray, C.A. The microscopic dynamics of freezing in super cooled colloidal fluids. J. Chem. Phys. 1994, 100, 9088. [Google Scholar] [CrossRef]
- Crocker, J.C.; Grier, D.G. Microscopic measurement of the pair interaction potential of charge-stabilized colloid. Phys. Rev. Lett. 1994, 73, 352. [Google Scholar] [CrossRef] [PubMed]
- Kepler, G.M.; Fraden, S. Attractive potential between confined colloids at low ionic strength. Phys. Rev. Lett. 1994, 73, 356–359. [Google Scholar] [CrossRef] [PubMed]
- Weiss, J.A.; Oxtoby, D.W.; Grier, D.G.; Murray, C.A. Martensitic transition in a confined colloidal suspension. J. Chem. Phys. Rev. B 1995, 103, 1180. [Google Scholar] [CrossRef]
- Crocker, J.C.; Grier, D.G. Methods of digital video microscopy for colloidal studies. J. Colloid Interface Sci. 1996, 179, 298–310. [Google Scholar] [CrossRef]
- Psaltis, D.; Quake, S.R.; Yang, C.H. Developing optofluidic technology through the fusion of microfluidics and optics. Nature 2006, 442, 381–386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Polin, M.; Roichman, Y.; Grier, D.G. Autocalibrated colloidal interaction measurements with extended optical traps. Phys. Rev. E 2008, 77, 051401. [Google Scholar] [CrossRef] [PubMed]
- Padgett, M.; Leonardo, R.D. Holographic optical tweezers and their relevance to lab on chip devices. Lab Chip 2011, 11, 1196–1205. [Google Scholar] [CrossRef] [PubMed]
- Pagliara, S.; Schwall, C.; Keyser, U.F. Optimizing diffusive transport through a synthetic membrane channel. Adv. Mater. 2013, 25, 844–849. [Google Scholar] [CrossRef] [PubMed]
- Vermeulen, K.C.; Wuite, G.J.L.; Stienen, G.J.M.; Schmidt, C.F. Optical trap stiffness in the presence and absence of spherical aberrations. Appl. Opt. 2006, 45, 1812–1819. [Google Scholar] [CrossRef] [PubMed]
- Allersma, M.W.; Gittes, F.; de Castro, M.J.; Stewart, R.J.; Schmidt, C.F. Two-dimensional tracking of ncd motility by back focal plane interferometry. Biophys. J. 1998, 74, 1074–1085. [Google Scholar] [CrossRef]
- Buosciolo, A.; Pesce, G.; Sasso, A. New calibration method for position detector for simultaneous measurements of force constants and local viscosity in optical tweezers. Opt. Commun. 2004, 230, 357–368. [Google Scholar] [CrossRef]
- Florint, E.L.; Pralle, A.; Stelzer, E.H.K.; Hörber, J.K.H. A Photonic force microscope calibrationby thermal noise analysis. Appl. Phys. Lett. 1997, 66, S75–S78. [Google Scholar]
- Ghislain, L.P.; Switz, N.A.; Webb, W.W. Measurement of small forces using an optical trap. Rev. Sci. Instrum. 1994, 65, 2762. [Google Scholar] [CrossRef]
- Wuite, G.J.L.; Davenport, R.J. Rappaport A, Bustamante C. An integrated laser trap/flow control video microscope for the study of single biomolecules. Biophys. J. 2000, 79, 1155–1167. [Google Scholar] [CrossRef]
- Svoboda, K.; Block, S.M. Biological applications of optical forces. Annu. Rev. Biophys. Biomol. Struct. 1994, 23, 247–285. [Google Scholar] [CrossRef] [PubMed]
- Berg-Sorensen, K.; Flyvberg, H. Power spectrum analysis for optical tweezers. Rev. Sci. Instrum. 2004, 75, 594. [Google Scholar] [CrossRef]
- Li, M.; Arlt, J. Trapping multiple particles in single optical tweezers. Opt. Commun. 2008, 281, 135–140. [Google Scholar] [CrossRef]
- Koehler, T.P.; Brotherton, C.M.; Grillet, A.M. Comparison of interparticle force measurement techniques using optical trapping. Colloids Surfaces A Physicochem. Eng. Asp. 2011, 384, 282–288. [Google Scholar] [CrossRef]
- Yale, P.; Konin, J.-M.E.; Koffi, Y.; Kouacou, M.A.; Zoueu, J.T. Étude de la stabilité et l'efficacité des pièges d’une pince optique. Afr. Sci. 2016, 12, 191–199. [Google Scholar]
- Osterman, N. TweezPal—Optical tweezers analysis and calibration software. Comput. Phys. Commun. 2010, 181, 1911–1916. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bead Diameter | Laser Power | Depth (µm) | Trap Stiffness kQPD (N/V) | Trap Stiffness kCamera (N/m) | Sensibility Factor β (µm/V) | Final-Trap Stiffness k (N/m) |
|---|---|---|---|---|---|---|
| 0.8 µm | 55.40 | 2.17 | 2.60 × 10−12 | 2.12 × 10−4 | 0.0234 | (4.00 ± 0.02) × 10−3 |
| 69.05 | 6.58 | 2.50 × 10−12 | 5.80 × 10−4 | 0.0232 | (4.14 ± 0.02) × 10−3 | |
| 2 µm | 69.05 | 5.25 | 3.38 × 10−12 | 4.47 × 10−5 | 0.1322 | (1.94 ± 0.02) × 10−3 |
| 58.38 | 5.21 | 3.30 × 10−12 | 4.59 × 10−5 | 0.1386 | (1.74 ± 0.02) × 10−4 |
| Bead Diameter | Power (mW) | Trap Stiffness (N/m) | Trap Force (pN) | Contact Force (pN) |
|---|---|---|---|---|
| 2 µm | 55.40 | (1.23 ± 0.01) × 10−4 | 6.330 ± 0.030 | - |
| 58.38 | (1.74 ± 0.02) × 10−4 | 6.977 ± 0.039 | - | |
| 69.05 | (1.94 ± 0.02) × 10−4 | 7.180 ± 0.036 | - | |
| 2 µm–4.5 µm | 55.40 | (5.08 ± 0.01) × 10−5 | 2.529 ± 0.022 | 3.801 ± 0.052 |
| 58.38 | (5.63 ± 0.01) × 10−5 | 2.533 ± 0.024 | 4.444 ± 0.063 | |
| 69.05 | (5.77 ± 0.02) × 10−5 | 2.540 ± 0.025 | 4.640 ± 0.061 | |
| 2 µm–2 µm | 61.94 | (2.75 ± 0.01) × 10−5 | 1.340 ± 0.020 | 4.540 ± 0.060 |
| 65.49 | (3.33 ± 0.01) × 10−5 | 1.336 ± 0.021 | 4.560 ± 0.058 | |
| 69.05 | (3.85 ± 0.03) × 10−5 | 1.341 ± 0.018 | 5.840 ± 0.061 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yale, P.; Konin, J.-M.E.; Kouacou, M.A.; Zoueu, J.T. New Detector Sensitivity Calibration and the Calculation of the Interaction Force between Particles Using an Optical Tweezer. Micromachines 2018, 9, 425. https://doi.org/10.3390/mi9090425
Yale P, Konin J-ME, Kouacou MA, Zoueu JT. New Detector Sensitivity Calibration and the Calculation of the Interaction Force between Particles Using an Optical Tweezer. Micromachines. 2018; 9(9):425. https://doi.org/10.3390/mi9090425
Chicago/Turabian StyleYale, Pavel, Jean-Michel Edoukoua Konin, Michel Abaka Kouacou, and Jérémie Thouakesseh Zoueu. 2018. "New Detector Sensitivity Calibration and the Calculation of the Interaction Force between Particles Using an Optical Tweezer" Micromachines 9, no. 9: 425. https://doi.org/10.3390/mi9090425