
Ultrarobust Actuator Comprising High-Strength Carbon Fibers and Commercially Available Polycarbonate with Multi-Stimulus Responses and Programmable Deformation

Abstract
:1. Introduction
2. Experiment
2.1. Materials
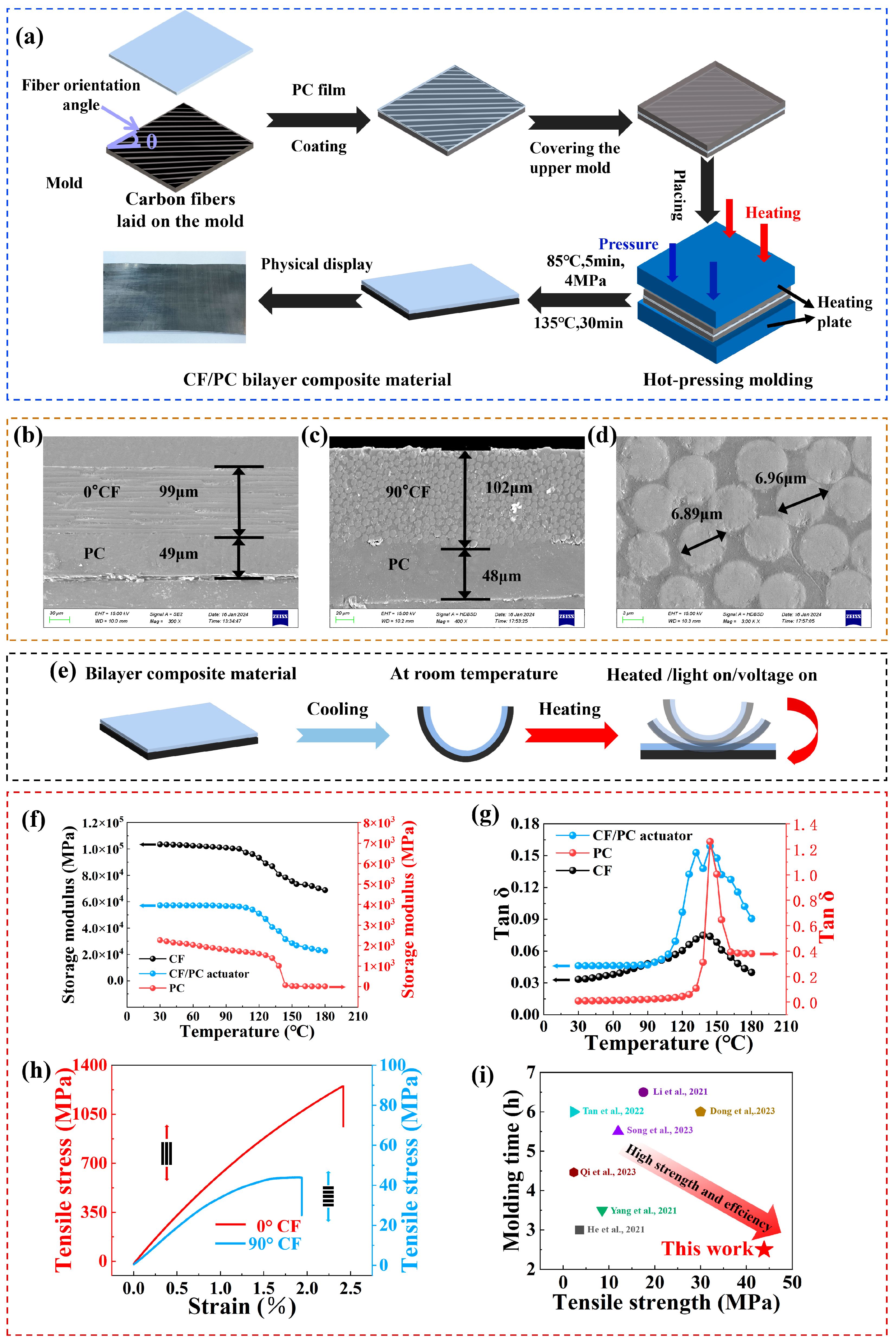
2.2. Preparation of the CF/PC Bilayer Actuator
2.3. Characterization
2.3.1. Morphology of the CF/PC Actuator
2.3.2. Dynamic Mechanical Analysis
2.3.3. Mechanical Property Characterization
2.3.4. Thermal Stimulus Response Behavior
2.3.5. Light Stimulus Response Behavior
2.3.6. Electric Stimulus Response Behavior
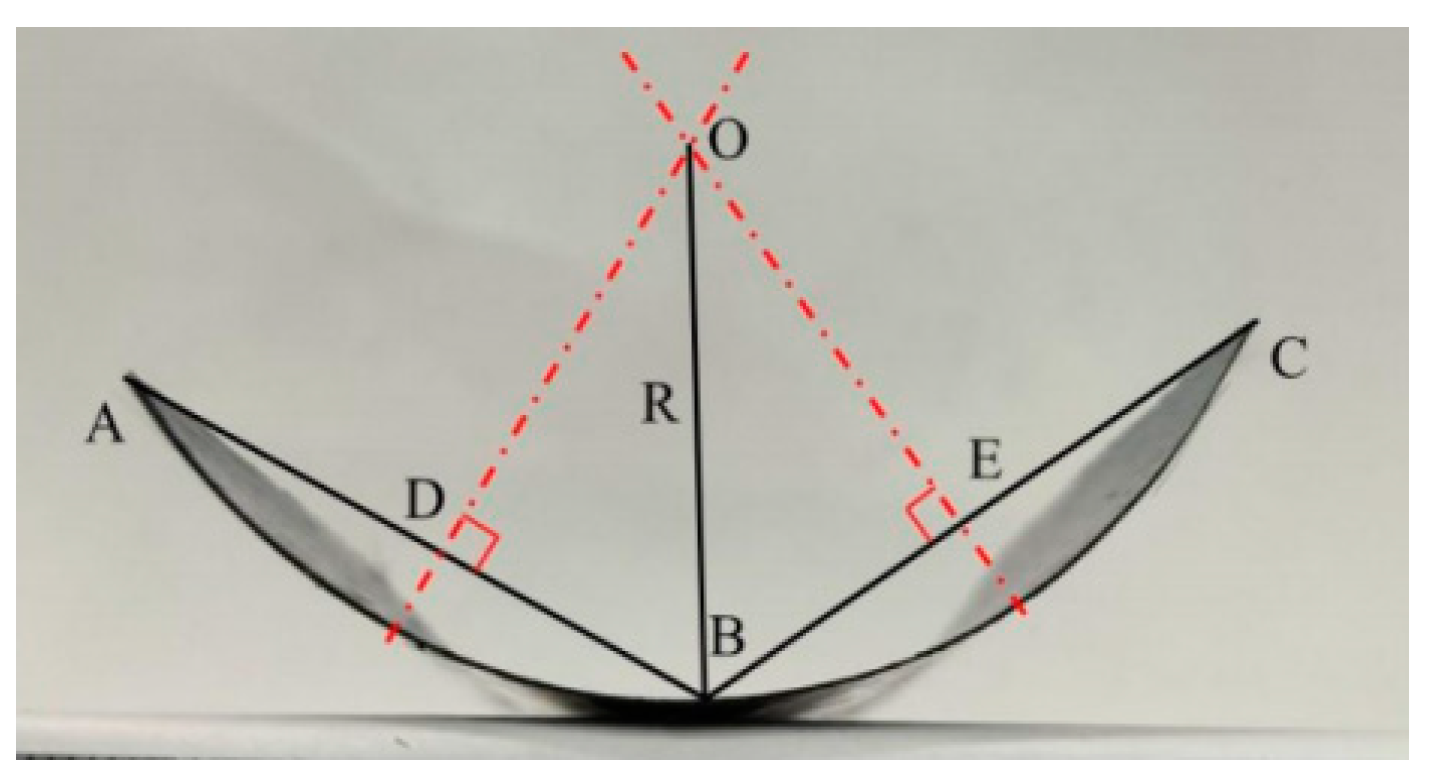
2.3.7. Bending Curvature
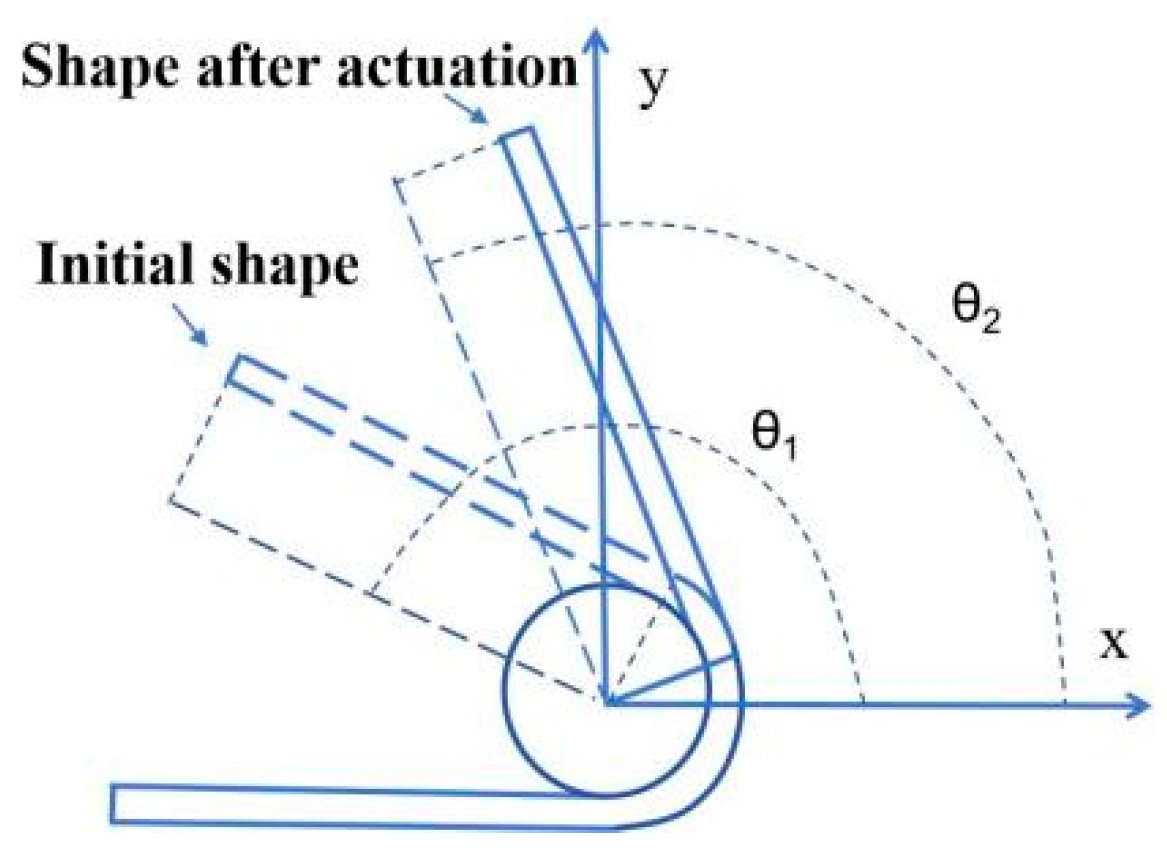
2.3.8. Actuation Deformation Rate
3. Results and Discussion
3.1. Fabrication and Characterization
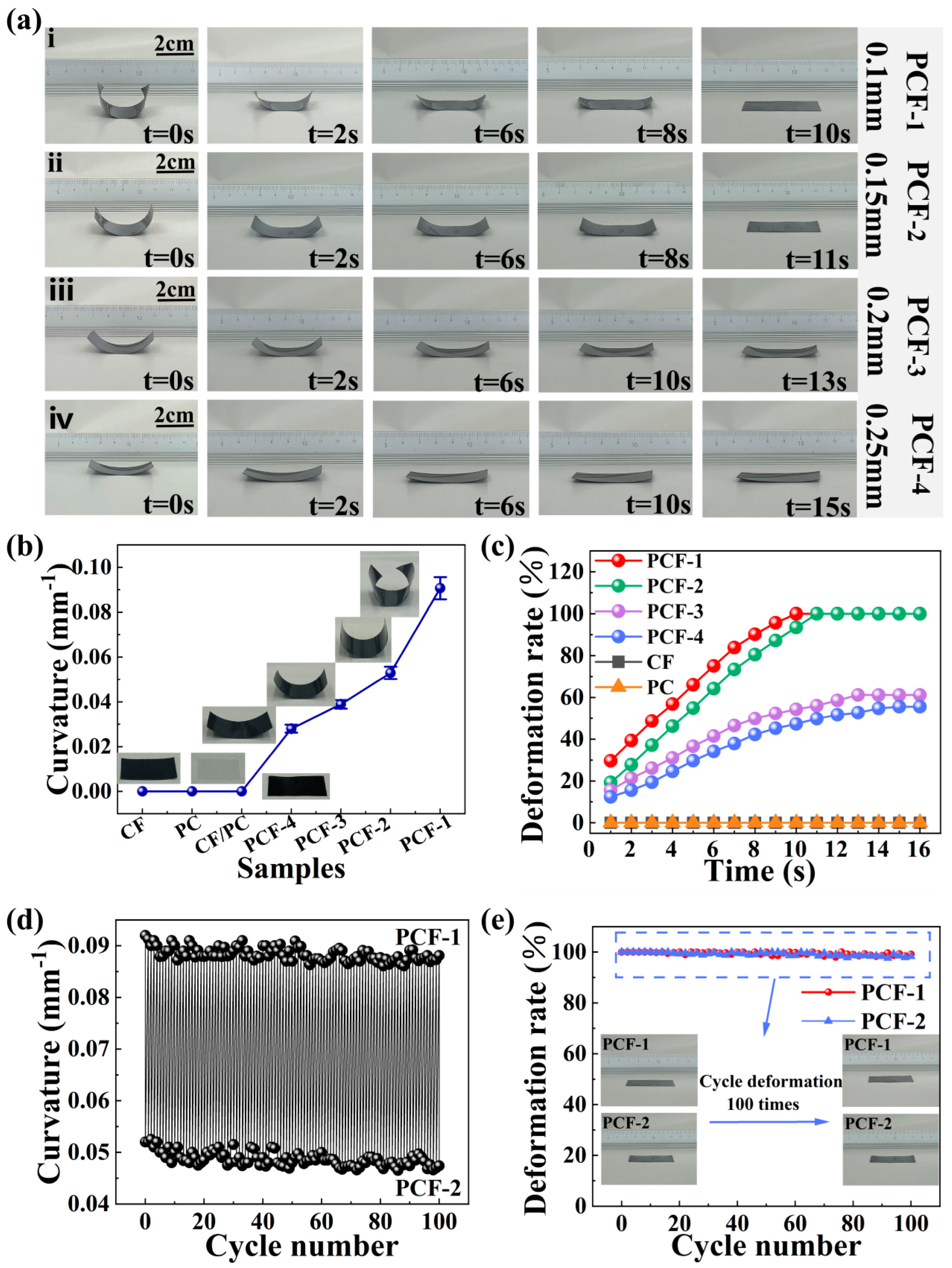
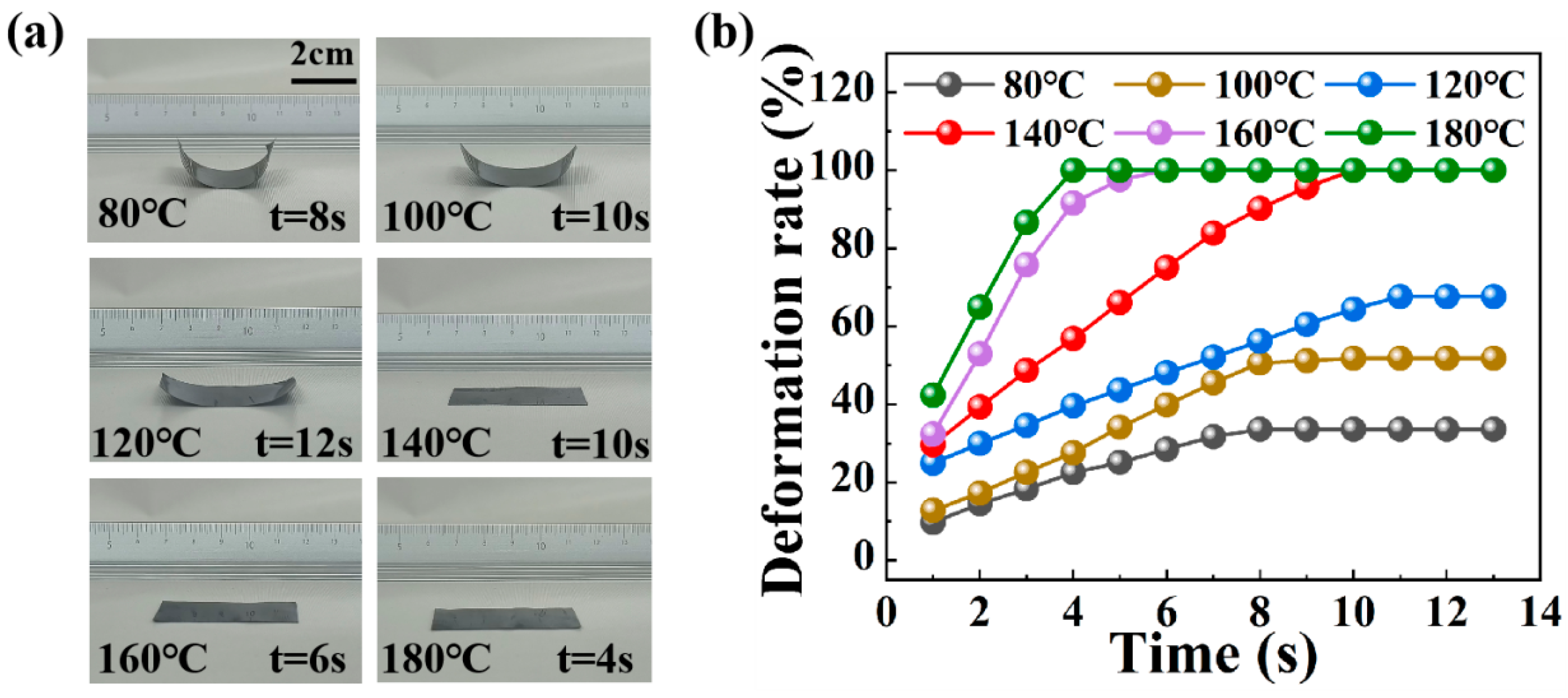
3.2. Thermo-Responsive Actuation Behavior of the CF/PC Actuator
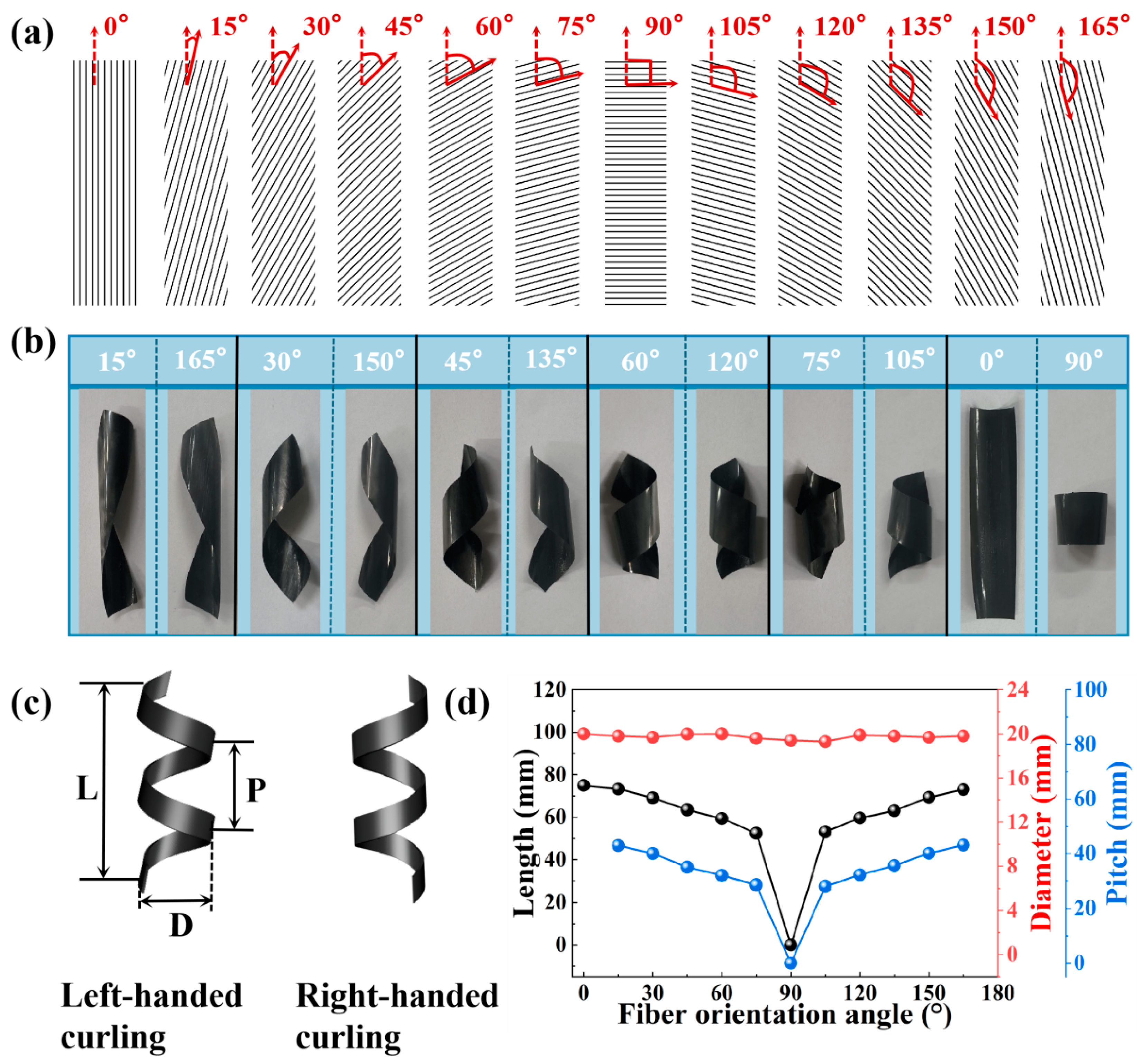
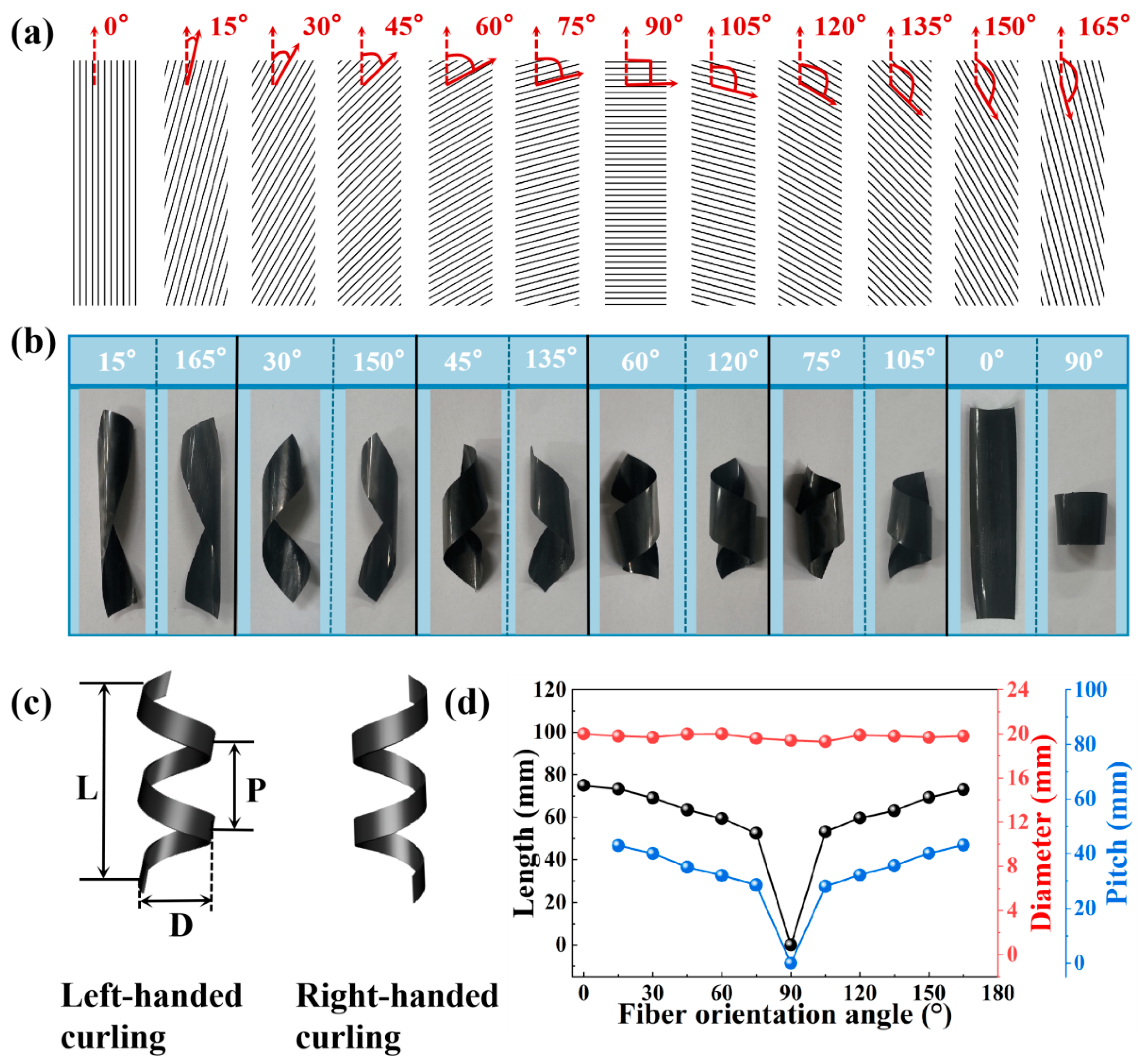
3.3. Programmable Actuation Behavior of the CF/PC Actuator
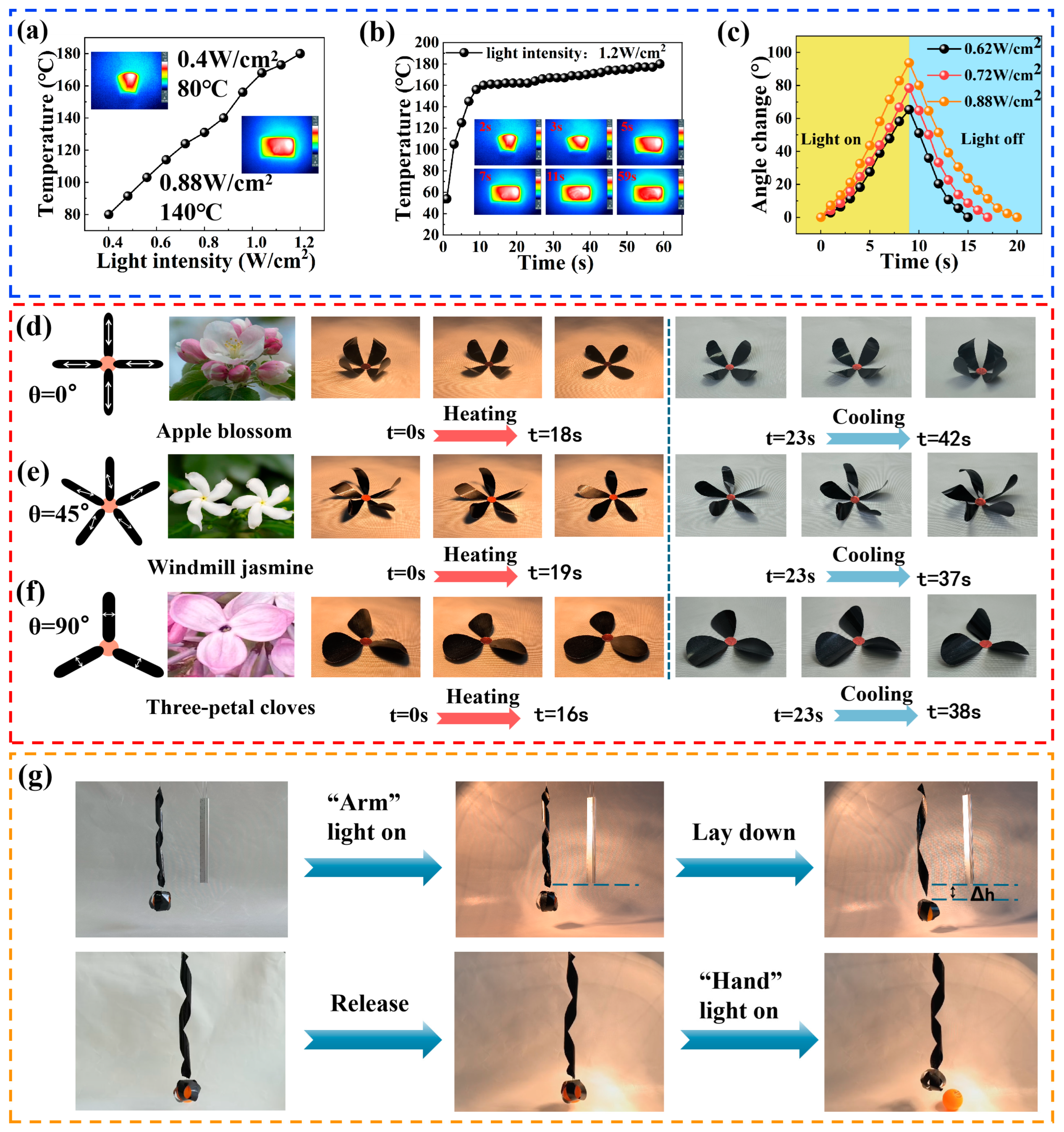
3.4. Light-Driven Behavior of the CF/PC Actuator
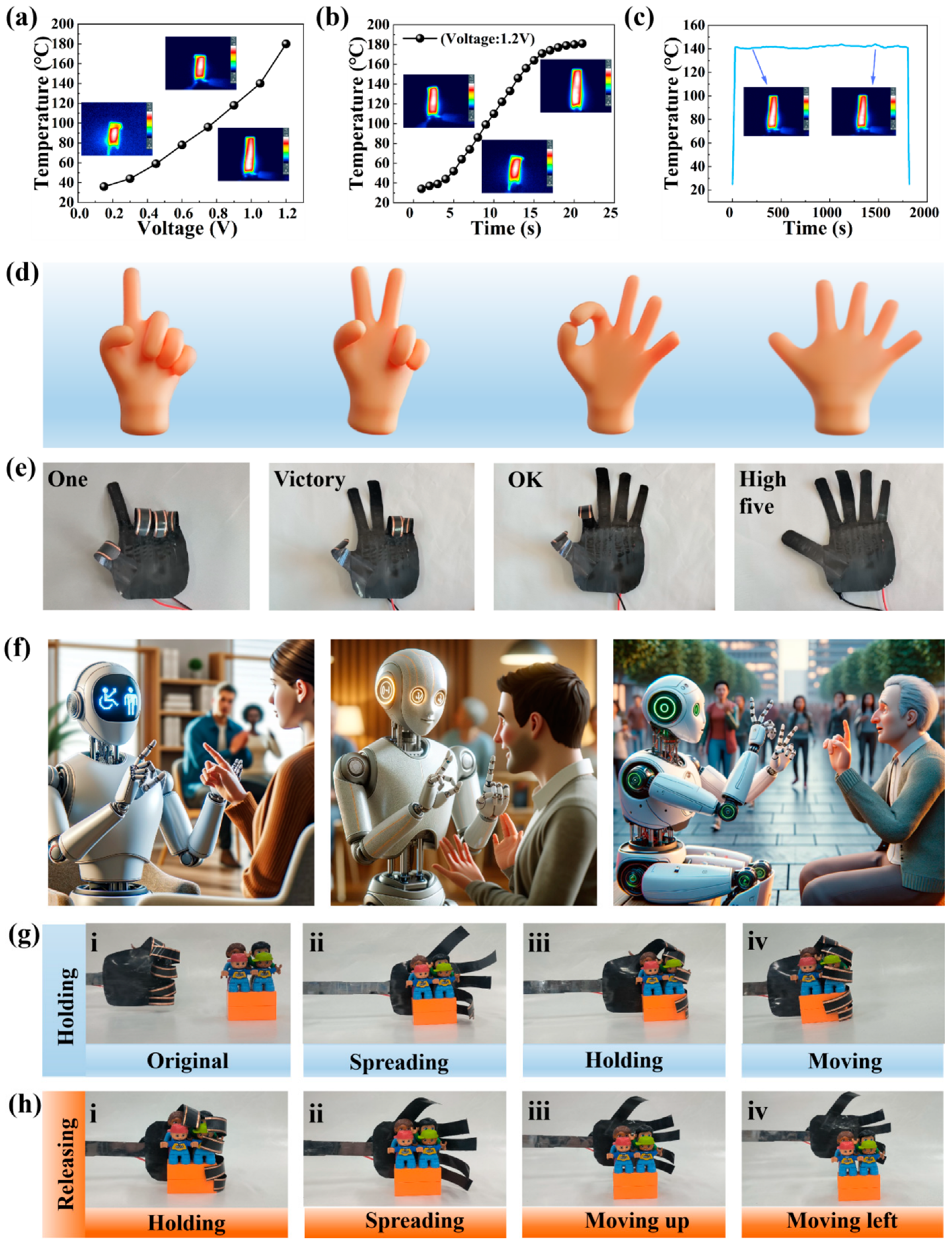
3.5. Electrically Driven Behavior of the CF/PC Actuator
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Luo, Z.; Qian, Y.; Zhang, W.; Chen, L. Monolithic MXene composites with multi-responsive actuating and energy-storage multi-functions. Chem. Eng. J. 2023, 454, 140513. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Han, D.; Ma, J.; Wang, D.; Li, X.; Sun, H. Quantum-confined-superfluidics-enabled moisture actuation based on unilaterally structured graphene oxide papers. Adv. Mater. 2019, 31, e1901585. [Google Scholar] [CrossRef] [PubMed]
- Zuo, B.; Wang, M.; Lin, B.-P.; Yang, H. Visible and infrared three-wavelength modulated multi-directional actuators. Nat. Commun. 2019, 10, 4539. [Google Scholar] [CrossRef] [PubMed]
- Charles, A.D.M.; Rider, A.N.; Brown, S.A.; Wang, C.H. Multifunctional magneto-polymer matrix composites for electromagnetic interference suppression, sensors and actuators. Prog. Mater. Sci. 2021, 115, 100705. [Google Scholar] [CrossRef]
- Yuk, H.; Lin, S.; Ma, C.; Takaffoli, M.; Fang, N.X.; Zhao, X. Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nat. Commun. 2017, 8, 14230. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Xuan, C.; Qian, X.; Alsaid, Y.; Hua, M.; Jin, L.; He, X. Soft phototactic swimmer based on self-sustained hydrogel oscillator. Sci. Robot. 2019, 4, eaax7112. [Google Scholar] [CrossRef] [PubMed]
- Hou, W.; Wang, J.; Lv, J. Bioinspired liquid crystalline spinning enables scalable fabrication of high-performing fibrous artificial muscles. Adv. Mater. 2023, 35, 2211800. [Google Scholar] [CrossRef] [PubMed]
- Roach, D.J.; Yuan, C.; Kuang, X.; Li, V.C.; Blake, P.; Romero, M.L.; Hammel, I.; Yu, K.; Qi, H.J. Long liquid crystal elastomer fibers with large reversible actuation strains for smart textiles and artificial muscles. ACS Appl. Mater. Interfaces 2019, 11, 19514–19521. [Google Scholar] [CrossRef]
- He, Y.; Zhao, X.Y.; Rao, P.; Song, H.M.; Yang, Y.; Sun, S.W.; Zhou, J.X.; Chen, Y.M.; Tan, L.; Ma, J.Z. Saline tolerant tough-yet-strong fiber-reinforced gel-nacre for soft actuator. Chem. Eng. J. 2022, 446, 137091. [Google Scholar] [CrossRef]
- Alipour, S.; Pourjavadi, A.; Poorghanbari, M. Smart multi-stimuli responsive single- and bilayer hydrogels with combined shape memory and actuating properties for self-healable circuits and sensors. Eur. Polym. J. 2023, 192, 112022. [Google Scholar] [CrossRef]
- Ji, X.; Liu, X.; Cacucciolo, V.; Imboden, M.; Civet, Y.; El Haitami, A.; Cantin, S.; Perriard, Y.; Shea, H. An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators. Sci. Robot. 2019, 4, eaaz6451. [Google Scholar] [CrossRef] [PubMed]
- Christianson, C.; Goldberg, N.N.; Deheyn, D.D.; Cai, S.; Tolley, M.T. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci. Robot. 2018, 3, eaat1893. [Google Scholar] [CrossRef]
- Song, C.; Zhang, Y.; Bao, J.; Wang, Z.; Zhang, L.; Sun, J.; Lan, R.; Yu, Z.; Zhu, S.; Yang, H. Light-responsive programmable shape-memory soft actuator based on liquid crystalline polymer/polyurethane network. Adv. Funct. Mater. 2023, 33, 2213771. [Google Scholar] [CrossRef]
- Xia, Y.; Mu, T.; He, Y.; Liu, Y.; Leng, J. Fiber-reinforced liquid crystalline elastomer composite actuators with multi-stimulus response properties and multi-directional morphing capabilities. Compos. Part B Eng. 2023, 256, 110640. [Google Scholar] [CrossRef]
- Wu, D.; Zhang, Y.; Yang, H.; Wei, A.; Zhang, Y.; Mensah, A.; Yin, R.; Lv, P.; Feng, Q.; Wei, Q. Scalable functionalized liquid crystal elastomer fiber soft actuators with multi-stimulus responses and photoelectric conversion. Mater. Horiz. 2023, 10, 2587–2598. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Liu, Y.; Cheng, Z.; Xie, Z.; Yin, L.; Wang, W.; Song, Y.; Zhang, H.; Wang, Y.; Fan, Z. Highly conductive MXene film actuator based on moisture gradients. Angew. Chem. Int. Ed. 2020, 59, 14029–14033. [Google Scholar] [CrossRef]
- Xu, L.; Zheng, H.; Xue, F.; Ji, Q.; Qiu, C.; Yan, Q.; Ding, R.; Zhao, X.; Hu, Y.; Peng, Q.; et al. Bioinspired multi-stimulus responsive MXene-based soft actuator with self-sensing function and various biomimetic locomotion. Chem. Eng. J. 2023, 463, 142392. [Google Scholar] [CrossRef]
- He, Q.; Wang, Z.; Wang, Y.; Wang, Z.; Li, C.; Annapooranan, R.; Zeng, J.; Chen, R.; Cai, S. Electrospun liquid crystal elastomer microfiber actuator. Sci. Robot. 2021, 6, eabi9704. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, W.; Wang, Y.; Mu, X.; Ling, S.; Yu, H.; Chen, W.; Guo, C.; Watson, M.C.; Yu, Y.; et al. Stimuli-responsive composite biopolymer actuators with selective spatial deformation behavior. Proc. Natl. Acad. Sci. USA 2020, 117, 14602–14608. [Google Scholar] [CrossRef]
- Das, S.; Singh, R.; Das, A.; Bag, S.; Paily, R.P.; Manna, U. Abrasion tolerant, non-stretchable and super-water-repellent conductive & ultrasensitive pattern for identifying slow, fast, weak and strong human motions under diverse conditions. Mater. Horiz. 2021, 8, 2851–2858. [Google Scholar]
- Peng, Z.; Shi, Y.; Chen, N.; Li, Y.; Pei, Q. Stable and high-strain dielectric elastomer actuators based on a carbon nanotube-polymer bilayer electrode. Adv. Funct. Mater. 2020, 31, 2008321. [Google Scholar] [CrossRef]
- Yang, X.; Chen, Y.; Zhang, X.; Xue, P.; Lv, P.; Yang, Y.; Wang, L.; Feng, W. Bioinspired light-fueled water-walking soft robots based on liquid crystal network actuators with polymerizable miniaturized gold nanorods. Nano Today 2022, 43, 101419. [Google Scholar] [CrossRef]
- Erb, R.M.; Sander, J.S.; Grisch, R.; Studart, A.R. Self-shaping composites with programmable bioinspired microstructures. Nat. Commun. 2013, 4, 1712. [Google Scholar] [CrossRef] [PubMed]
- Harrington, M.J.; Razghandi, K.; Ditsch, F.; Guiducci, L.; Rueggeberg, M.; Dunlop, J.W.; Fratzl, P.; Neinhuis, C.; Burgert, I. Origami-like unfolding of hydro-actuated ice plant seed capsules. Nat. Commun. 2011, 2, 337. [Google Scholar] [CrossRef]
- Elbaum, R.; Zaltzman, L.; Burgert, I.; Fratzl, P. The role of wheat awns in the seed dispersal unit. Science 2007, 316, 884–886. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Liu, Q.; Hess, A.J.; Mi, S.; Liu, X.; Chen, Z.; Xie, Y.; Smalyukh, I.I. Programmable Ultralight Magnets via Orientational Arrangement of Ferromagnetic Nanoparticles within Aerogel Hosts. ACS Nano 2019, 13, 13875–13883. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Wang, L.; Xia, N.; Wang, Y.; Wang, S.; Yang, Z.; Jin, D.; Du, X.; Yu, E.; Pan, C.; et al. Multi-stimuli-response programmable soft actuators with site-specific and anisotropic deformation behavior. Nano Energy 2021, 88, 106254. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.A.; Ambulo, C.P.; Lee, H.B.; Kim, S.H.; Naik, V.V.; Haines, C.S.; Aliev, A.E.; Ovalle-Robles, R.; Baughman, R.H.; et al. Intelligently actuating liquid crystal elastomer-carbon nanotube composites. Adv. Funct. Mater. 2019, 29, 1905063. [Google Scholar] [CrossRef]
- Xu, W.; Dong, P.; Lin, S.; Kuang, Z.; Zhang, Z.; Wang, S.; Ye, F.; Cheng, L.; Wu, H.; Liu, A. Bioinspired bilayer hydrogel-based actuator with rapidly bidirectional actuation, programmable deformation and devisable functionality. Sens. Actuators B Chem. 2022, 359, 131547. [Google Scholar] [CrossRef]
- Shian, S.; Bertoldi, K.; Clarke, D.R. Dielectric elastomer based “grippers” for soft robotics. Adv. Mater. 2015, 27, 6814–6819. [Google Scholar] [CrossRef]
- Huang, Y.; Jiang, J.; Li, J.; Su, C.; Yu, Q.; Wang, Z.; Chen, N.; Shao, H. Light-driven bi-stable actuator with oriented polyimide fiber reinforced structure. Compos. Commun. 2022, 31, 101128. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, K.; Ahn, J.; Wang, F.; Sun, Y.; Lee, J.; Cheong, J.Y.; Ma, C.; Zhao, H.; Duan, G.; et al. Morph-genetic bamboo-reinforced hydrogel complex for bio-mimetic actuator. Chem. Eng. J. 2023, 463, 142391. [Google Scholar] [CrossRef]
- Bai, L.; Zhang, Y.; Guo, S.; Qu, H.; Yu, Z.; Yu, H.; Chen, W.; Tan, S.C. Hygrothermic wood actuated robotic hand. Adv. Mater. 2023, 35, e2211437. [Google Scholar] [CrossRef] [PubMed]
- Terasawa, N.; Asaka, K. High-performance graphene oxide/vapor-grown carbon fiber composite polymer actuator. Sens. Actuators B Chem. 2018, 255, 2829–2837. [Google Scholar] [CrossRef]
- Johannisson, W.; Harnden, R.; Zenkert, D.; Lindbergh, G. Shape-morphing carbon fiber composite using electrochemical actuation. Proc. Natl. Acad. Sci. USA 2020, 117, 7658–7664. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Yang, H.; Zhu, N.; Chen, G.; Miao, Y.; Zheng, J.; Cong, Y.; Chen, Y.; Gao, J.; Jian, X.; et al. Biotissue-inspired anisotropic carbon fiber composite hydrogels for logic gates, Integrated Soft Actuators, and Sensors with Ultra-High Sensitivity. Adv. Funct. Mater. 2023, 33, 2211189. [Google Scholar] [CrossRef]
- Zhang, X.; Tian, M.; Raza, T.; Zhao, H.; Wang, J.; Du, X.; Zhang, X.; Qu, L. Soft robotic reinforced by carbon fiber skeleton with large deformation and enhanced blocking forces. Compos. Part B Eng. 2021, 223, 109099. [Google Scholar] [CrossRef]
- Luo, M.; Tian, X.; Shang, J.; Zhu, W.; Li, D.; Qin, Y. Impregnation and interlayer bonding behaviours of 3D-printed continuous carbon-fiber-reinforced poly-ether-ether-ketone composites. Compos. Part A Appl. Sci. Manuf. 2019, 121, 130–138. [Google Scholar] [CrossRef]
- Mulle, M.; Zitoune, R.; Collombet, F.; Olivier, P.; Grunevald, Y.-H. Thermal expansion of carbon-epoxy laminates measured with embedded FBGS – Comparison with other experimental techniques and numerical simulation. Compos. Part A Appl. Sci. Manuf. 2007, 38, 1414–1424. [Google Scholar] [CrossRef]
- Budiman, A.S.; Anbazhagan, S.; Illya, G.; Song, W.; Sahay, R.; Tippabhotla, S.; Tay, A. Enabling curvable silicon photovoltaics technology using polycarbonate-sandwiched laminate design. Sol. Energy 2021, 220, 462–472. [Google Scholar] [CrossRef]
- Liu, Z.; Lan, X.; Zeng, C.; Liu, L.; Bian, W.; Leng, J.; Liu, Y. Temperature dependence analysis of mechanical properties and bending behaviors of shape memory programmable composites. Compos. Struct. 2023, 321, 117228. [Google Scholar] [CrossRef]
- Castillo, F.Y.; Socher, R.; Krause, B.; Headrick, R.; Grady, B.P.; Prada-Silvy, R.; Pötschke, P. Electrical, mechanical, and glass transition behavior of polycarbonate-based nanocomposites with different multi-walled carbon nanotubes. Polymer 2011, 52, 3835–3845. [Google Scholar] [CrossRef]
- Luo, L.; Zhang, F.; Leng, J. Multi-performance shape memory epoxy resins and their composites with narrow transition temperature range. Compos. Sci. Technol. 2021, 213, 108899. [Google Scholar] [CrossRef]
- Qi, Y.; Zhou, C.; Qiu, Y.; Cao, X.; Niu, W.; Wu, S.; Zheng, Y.; Ma, W.; Ye, H.; Zhang, S. Biomimetic Janus photonic soft actuator with structural color self-reporting. Mater. Horiz. 2022, 9, 1243–1252. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Wang, H.; Zhang, S.; Wei, Y.; He, X.; Wang, J.; Zhang, Y.; Ji, Y. Vitrimer-based soft actuators with multiple responsiveness and self-healing ability triggered by multiple stimuli. Matter 2021, 4, 3354–3365. [Google Scholar] [CrossRef]
- Tan, P.; Wang, H.; Xiao, F.; Lu, X.; Shang, W.; Deng, X.; Song, H.; Xu, Z.; Cao, J.; Gan, T.; et al. Solution-processable, soft, self-adhesive, and conductive polymer composites for soft electronics. Nat. Commun. 2022, 13, 358. [Google Scholar] [CrossRef]
- Li, H.; Li, R.; Wang, K.; Hu, Y. Dual-responsive soft actuator based on aligned carbon nanotube composite/graphene bimorph for bioinspired applications. Macromol. Mater. Eng. 2021, 306, 2100166. [Google Scholar] [CrossRef]
- Qi, X.; Wang, W.; Dai, H.; Zhu, Y.; Dong, Y.; Fu, S.-Y.; Ni, Q.; Fu, Y. Multifunctional two-way shape memory RGO/ethylene-vinyl acetate composite yarns for electro-driven actuators and high sensitivity strain sensors. Compos. Part A Appl. Sci. Manuf. 2023, 169, 107521. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, J.; Guo, X.; Yang, S.; Ozen, M.O.; Chen, P.; Liu, X.; Du, W.; Xiao, F.; Demirci, U.; et al. Multi-stimuli-responsive programmable biomimetic actuator. Nat. Commun. 2019, 10, 4087. [Google Scholar] [CrossRef]
- Chen, Y.; Valenzuela, C.; Zhang, X.; Yang, X.; Wang, L.; Feng, W. Light-driven dandelion-inspired microfliers. Nat. Commun. 2023, 14, 3036. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | CF Thickness (mm) | PC Thickness (mm) | Actuator Thickness (mm) |
|---|---|---|---|
| PCF-1 | 0.05 ± 0.01 | 0.05 ± 0.002 | 0.1 ± 0.01 |
| PCF-2 | 0.1 ± 0.01 | 0.05 ± 0.002 | 0.15 ± 0.01 |
| PCF-3 | 0.15 ± 0.005 | 0.05 ± 0.002 | 0.2 ± 0.01 |
| PCF-4 | 0.2 ± 0.005 | 0.05 ± 0.002 | 0.25 ± 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheng, J.; Jiang, S.; Geng, T.; Huang, Z.; Li, J.; Jiang, L. Ultrarobust Actuator Comprising High-Strength Carbon Fibers and Commercially Available Polycarbonate with Multi-Stimulus Responses and Programmable Deformation. Polymers 2024, 16, 1144. https://doi.org/10.3390/polym16081144
Sheng J, Jiang S, Geng T, Huang Z, Li J, Jiang L. Ultrarobust Actuator Comprising High-Strength Carbon Fibers and Commercially Available Polycarbonate with Multi-Stimulus Responses and Programmable Deformation. Polymers. 2024; 16(8):1144. https://doi.org/10.3390/polym16081144
Chicago/Turabian StyleSheng, Jie, Shengkun Jiang, Tie Geng, Zhengqiang Huang, Jiquan Li, and Lin Jiang. 2024. "Ultrarobust Actuator Comprising High-Strength Carbon Fibers and Commercially Available Polycarbonate with Multi-Stimulus Responses and Programmable Deformation" Polymers 16, no. 8: 1144. https://doi.org/10.3390/polym16081144