2.2. Insecticide and Reagents
The experimental reagents were as follows: 20% acetamiprid wettable powder (Sino-Agri United Biotechnology Co., Ltd., Jinan, China), 240 g/L Spirodiclofen, suspension concentrate (Shandong Zouping Nongyao Co., Ltd., Binzhou, China), 5% avermectin emulsifiable concentrate (Hebei Beyong Bio-Chemical Co., Ltd., Shijiazhuang, China), allura red indicators (Zhejiang Gigagold Pigment Technology Co., Ltd., Wenzhou, China), 97% acetamiprid standard and 97% spirodiclofen standard (J&K Scientific Ltd., Beijing, China), and HPLC-grade methanol (Sigma-Aldrich, St. Louis, MO, USA) and primary secondary amine (PSA) sorbent (Welch Technology (Shanghai) Limited Co., Ltd., Shanghai, China).
The experimental equipment was as follows: Jifei P20 UAV (Guangzhou Jifei Science and Technology Co., Ltd., Guangzhou, China) with a new generation of SUPERX2 RTK flight control system with more accurate GNSS RTK positioning module and spray system to make UAV plant protection more precise, smarter, and more efficient (
Figure 1,
Table 1). A 3W-1000Y boom sprayer (SINO-AGRI Fengmao Plant Protection Machinery Co., Ltd., Beijing, China), an anemometer (Beijing Zhongxi Great Technology Co., Ltd., China), a temperature and humidity instrument (Shenzhen Huatu Electric Co., Ltd., Shenzhen, China), an Tecan Infinite 200 PRO ELISA instrument (Switzerland), and agilent 7890B gas chromatograph with flame ionization detector (FID) (Agilent Technologies, Palo Alto, CA, USA).
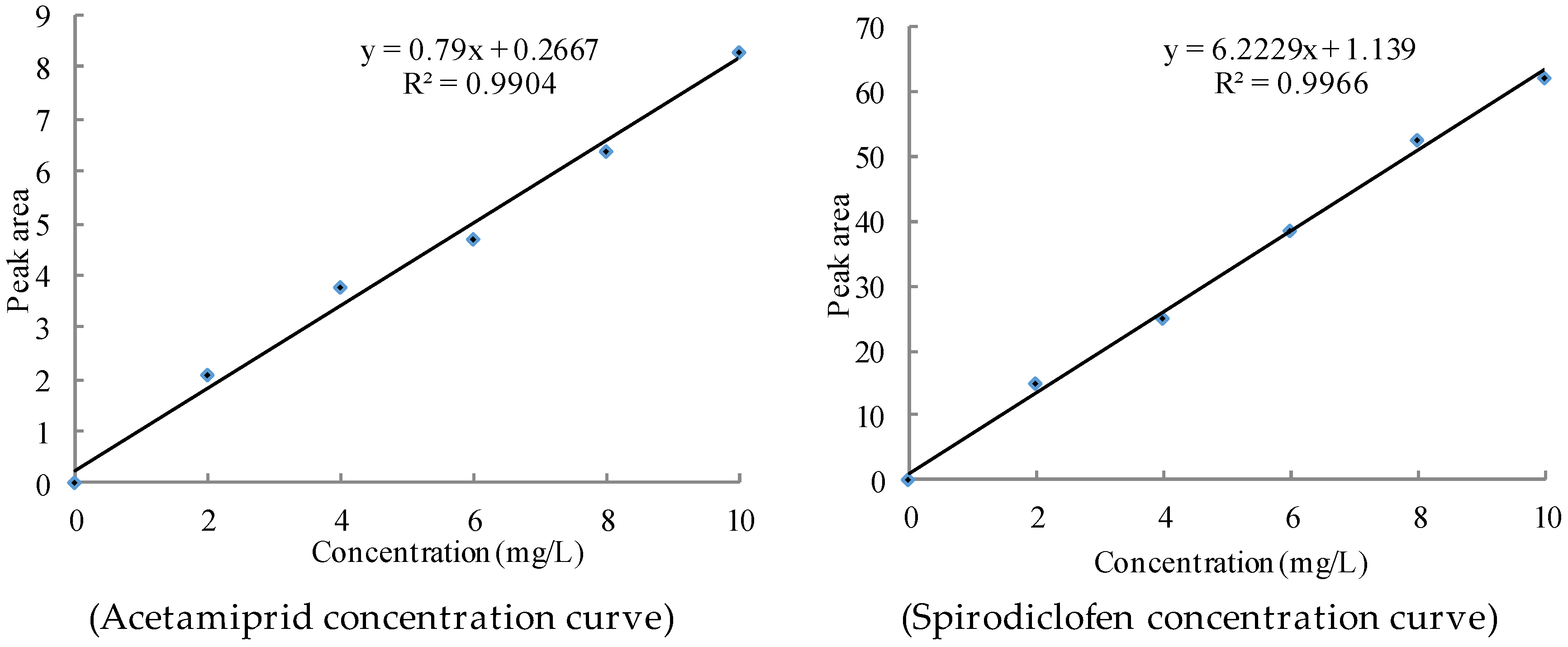
Acetamiprid was analyzed with an Agilent 7890B GC equipped with an HP-5 30 m capillary column with a film thickness of 0.32 mm × 0.25 μm (Agilent Technologies, Palo Alto, CA, USA). The electronic balance, BSA224S-CW, was from Sartorius, Göttingen, Germany. The high-speed centrifuge, LDZS-2, was from Beijing Jingli centrifuge Co., Ltd., Beijing, China. The swirl meter, MS3 D S25, IKA, came from Staufen im Breisgau, Germany. The ultrasonic cleaner, KQ-500 DB, was from Kunshan Ultrasonic Instruments Co., Ltd., Kunshan, Jiangsu, China, and the rotary evaporators, RV10 D, were from IKA, Staufen im Breisgau, Germany.
2.4. Evaluation of Droplet Deposition
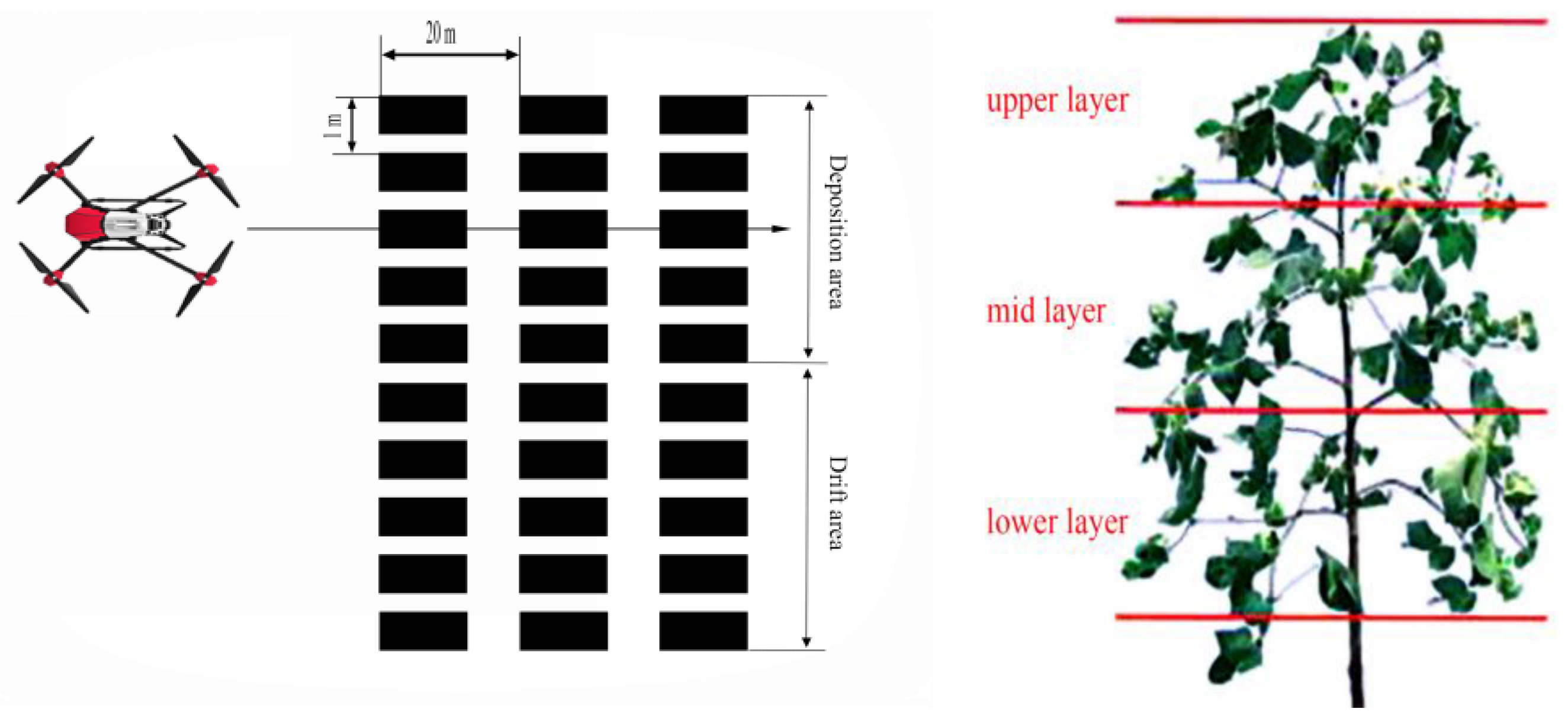
The UAV spraying test aimed to study the droplet deposition and drifting regularity of the cotton plants by UAV spraying. Before spraying, a handheld GPS locator was used to determine the coordinates of each spraying zone. Five points (deposition area) were arranged on the line perpendicular to the spray belt in the test area, and five points (drift area) were arranged from the edge of the spray width, with 1 m between each point (determined according to the spray width). The sample layout was repeated thrice. The UAV flew through the center of the deposition area as shown in
Figure 2. Before spraying, a stapler was used to attach kromekote cards and filter paper to cotton leaves in the cotton canopy. The kromekote cards and filter paper were placed at a height that was equivalent to the lower, middle, and upper thirds of the cotton canopy (
Figure 2) [
25].
The kromekote cards and filter papers were collected after the field experiment and placed in self-sealing bags. Each card was separately photographed on a light table using a high resolution digital-single-lens-reflex (DSLR) camera positioned at a 10 cm height above the light table. Photographs of the sprayed cards were analyzed using Image J software (Image J 1.48, National Institutes of Health, Bethesda, MD, USA). Each card was cropped to remove the background area, changed into 8-bit format, and then individually threshold adjusted to ensure that only sprayed droplets were included in the sample analysis. Each image was analyzed for droplet number density and percent coverage. Coverage was determined as the percent coverage of the card from the blue dye of the deposited droplets [
24].
In the laboratory, each filter paper was washed with 5 mL of distilled water and kept in separate bags. Each bag was shaken for 1 min, and the papers were allowed to soak for 1 h. Afterwards, the washing solution was removed from the bag, and the colorant concentration was measured at 514 nm with an ELISA instrument. The solution obtained from washing unsprayed strips of filter papers was used as the baseline solution. Droplet distribution was determined in accordance with the standard curve of allura red. Equation (1) was used to calculate the deposition of droplets on the cotton plants [
15]:
where
βdep is the droplet deposition in μL/cm
2;
ρsmpl is the ELISA instrument reading of the sample;
ρblk is the ELISA instrument reading of the blanks (collector + dilution water);
Fcal is the relationship between the ELISA instrument reading and the allura red concentration in (μg/L)/unit number;
Vdii is the volume of the dilution liquid used to dilute tracer from collector, L;
ρspray is the concentration of the tracer in spray in g/L; and
Acol is the area of the filter paper in cm
2.
The experiment ended after the droplets on the Kromekote card were dried (deposition area), sealed in a self-sealing bag, and the data were collected and processed in the laboratory. To characterize the uniformity of droplet deposition between collection points in the test, the uniformity of droplet deposition was measured by the CV of droplet deposition densities at different locations of the cotton plants in the UAV effective spray width. The CV of droplet deposition density was calculated by Equations (2) and (3).
where
S is the sample standard deviation,
Xi is the number of droplets per unit area at each collection point, and
is the number of collection points per layer.
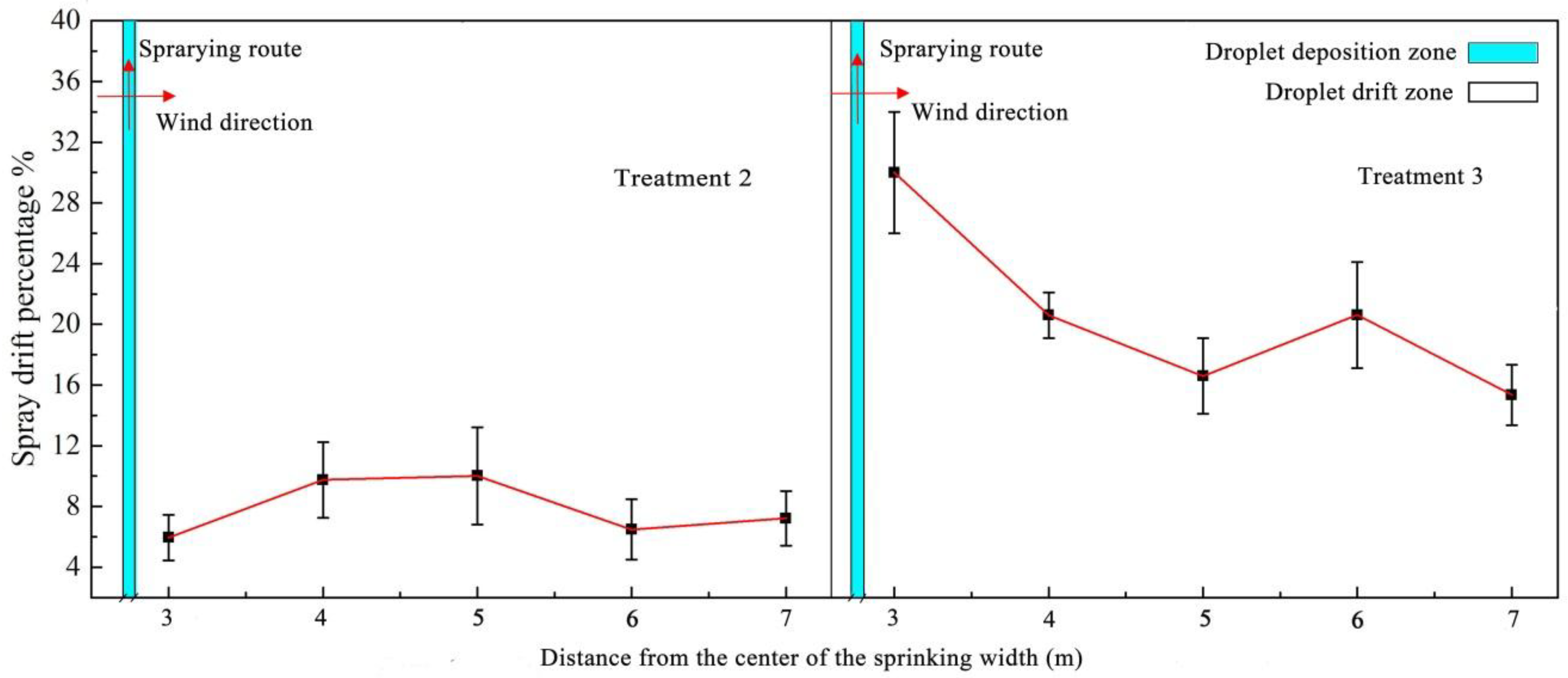
To characterize the distribution of the droplet drift between collection points in the test, the drift of droplets in the experiment was expressed by the spray drift percentage of the UAV [
26]. The droplet drift percentage was calculated by Equation (4):
where
βdep is the spray drift deposit in μL/cm
2;
βdep% is the spray drift percentage in %; and
βV is the spray volume in L/ha
2.
Allura Red Concentration: Absorbance Demarcation
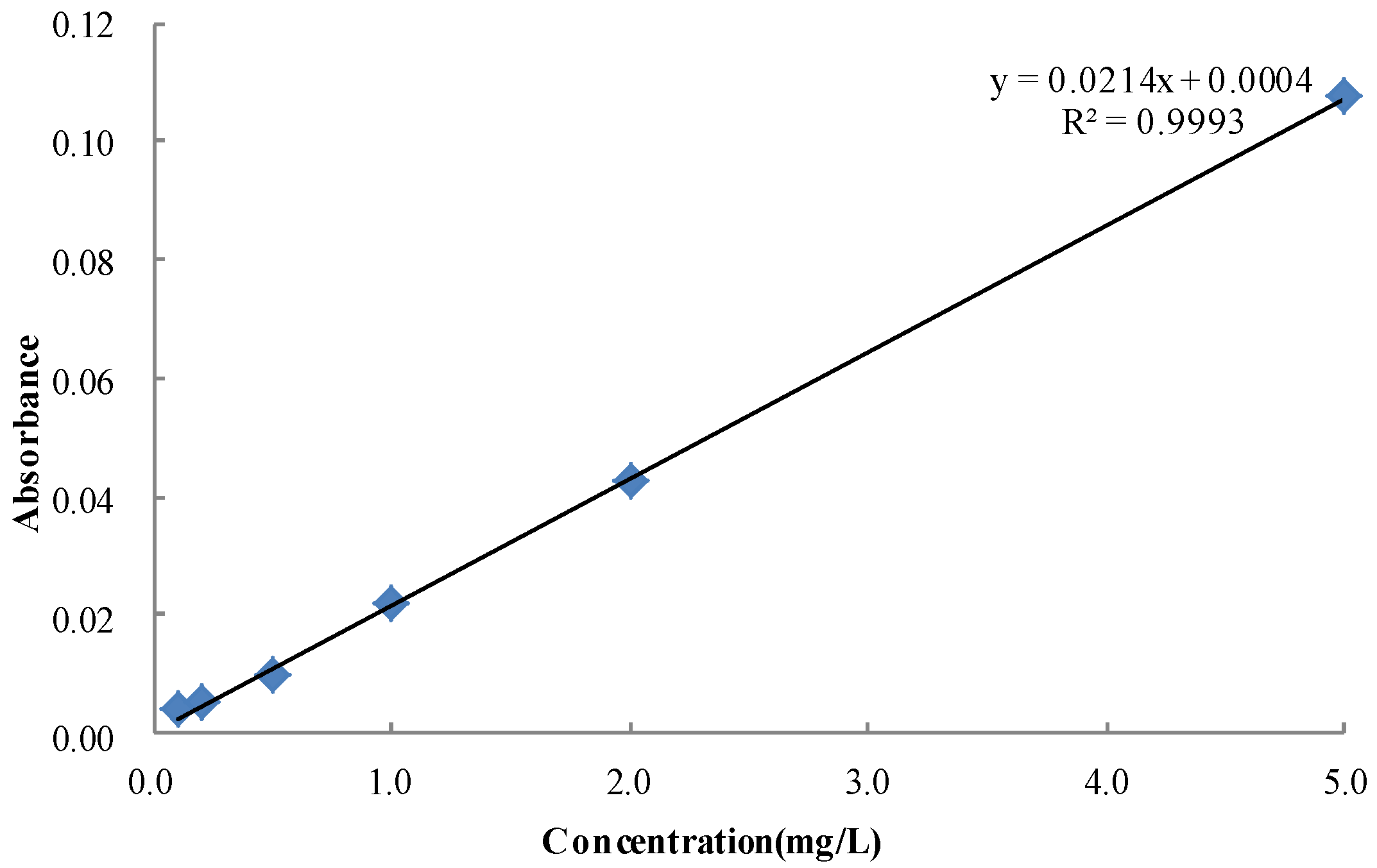
To ensure the accuracy of the measurement data, the allura red (20 mg) was dissolved in 100 mL of water and diluted to 1 L to a final concentration of 20 mg/L. The mother liquid was then diluted to 0.1, 0.2, 0.5, 1, 2, and 5 mg/L. The absorbance values were measured at 514 nm in triplicate per concentration by using the ELISA instrument. The standard curve of allura red was created on the basis of the absorbance values of the six solutions [
12], as shown in
Figure 3.
The linear fitting of the standard solution concentration and absorbance, correlation index R
2 = 0.993, and concentration and absorbance for the relationship was as follows:
where
A is the absorbance of the allura red solution and
C is the concentration of the allura red solution in mg/L.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}