Performance of Adaptive Unstructured Mesh Modelling in Idealized Advection Cases over Steep Terrains

 , , and
, , and
Abstract
:1. Introduction
2. Adaptive Model: Fluidity
3. Governing Equations and Parameters
3.1. Governing Equation and Discretization
3.2. Parameters and Meshes
4. Results
4.1. 2D Advection Tests
- Case I: a horizontal advection test similar to [4] which is not meant to represent a real atmospheric boundary layer scenario but just aims to evaluate the scalar advection performance in a simple analytical velocity field;
- Case II: a TF advection test similar to Case I except with the TF velocity field as proposed by [5];
- Case III: advection tests similar to Case I except with spatially non-uniform velocity fields, including an upward linear (III-1), a downward linear (III-2) and a wavelike (III-3) velocity field. In these ascending and descending velocity test scenarios, the interaction between the terrain and the imposed velocity field is neglected;
- Case IV: advection tests similar to Case I except for the terrains, including a one-crest (IV-1), a five-crest (IV-2) and a ten-crest (IV-3) terrain;
- Case V: an advection test similar to Case II except that the tracer moves along the terrain surface.
4.1.1. Case I: Horizontal Advection Test
4.1.2. Case II: Terrain-Following Advection Test
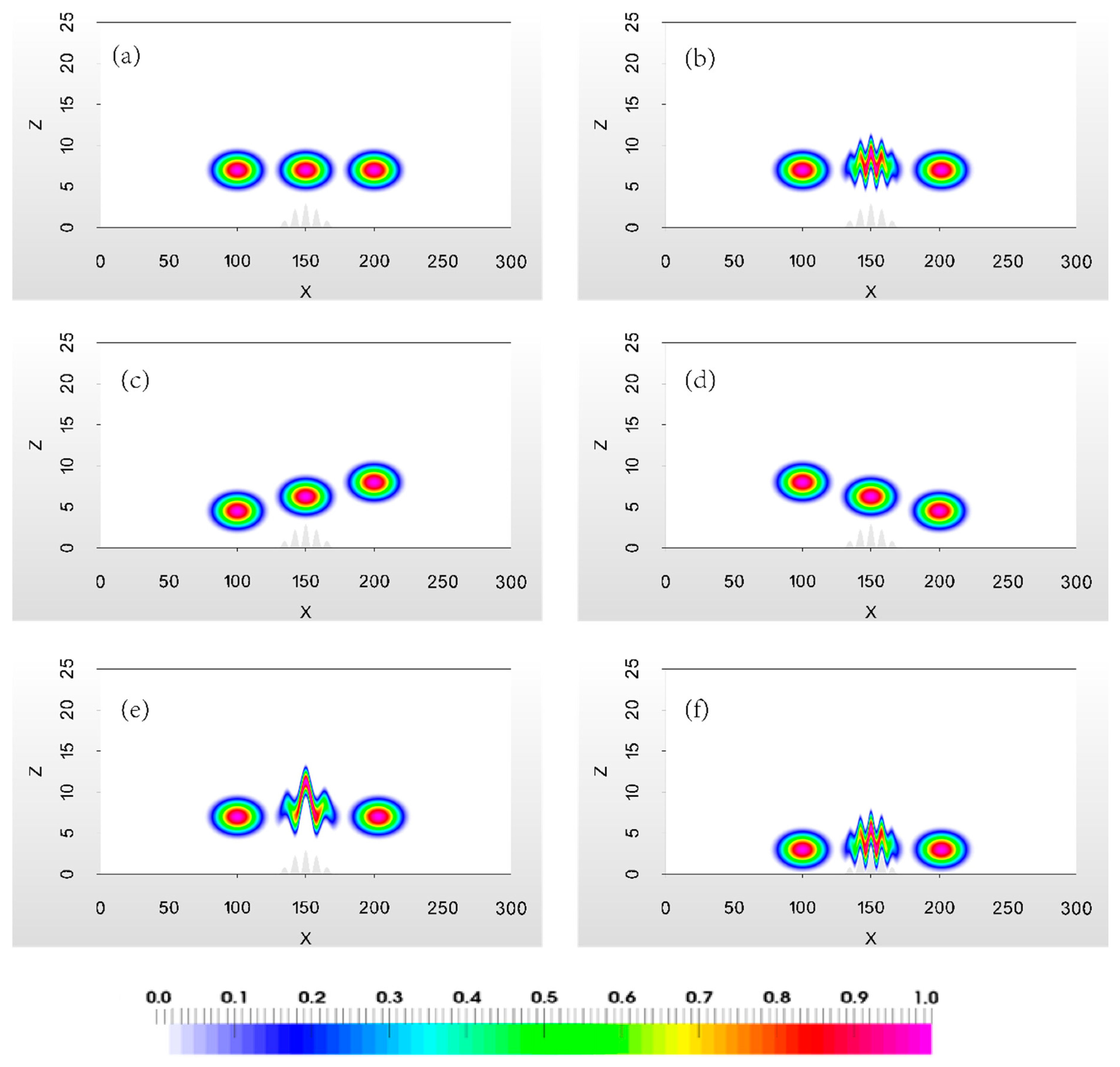
4.1.3. Case III: Advection Tests with Varying Velocity Directions
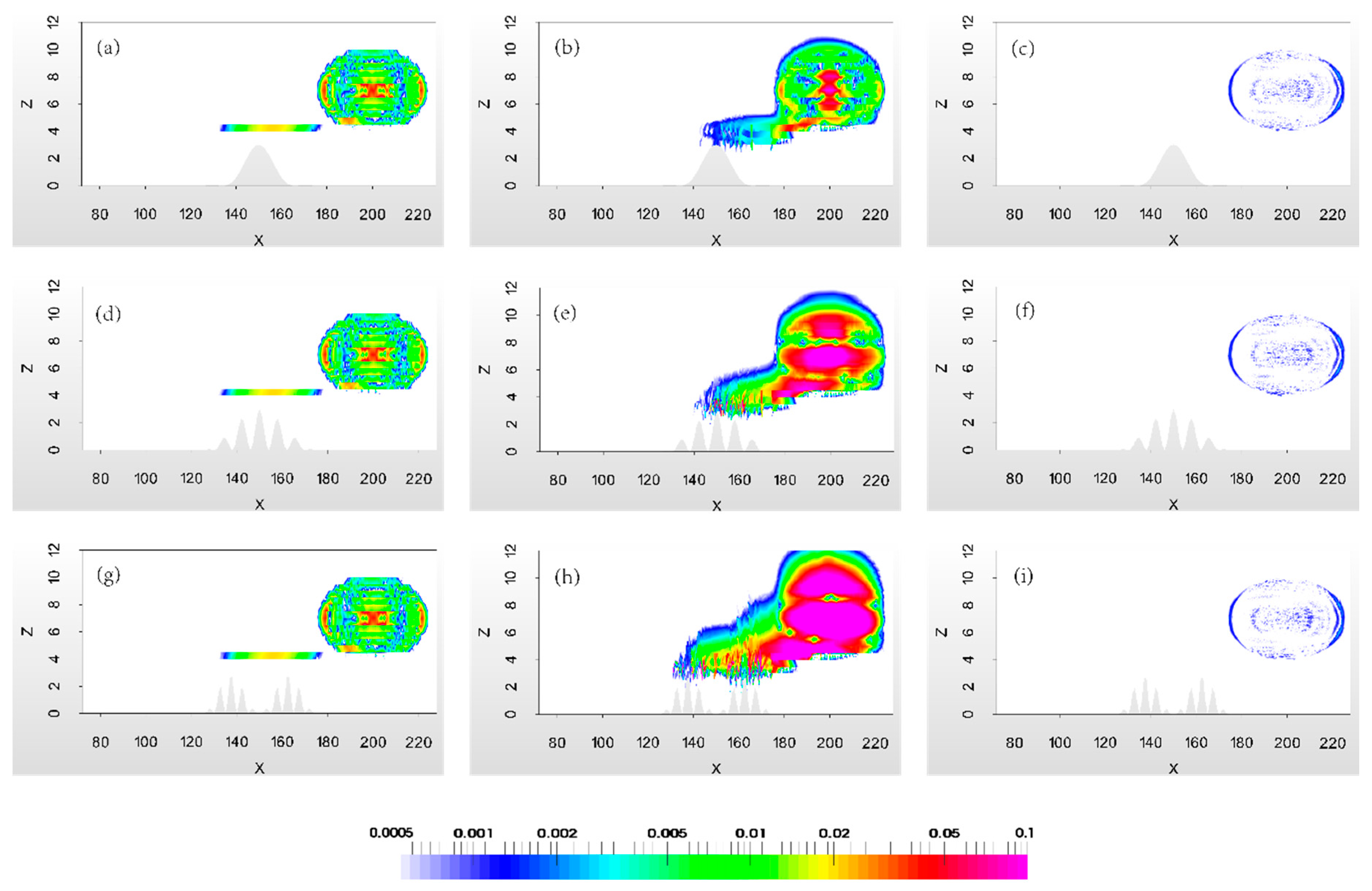
4.1.4. Case IV: Advection Tests with Different Types of Terrains
4.1.5. Case V: An Advection Test along the Terrain Surface
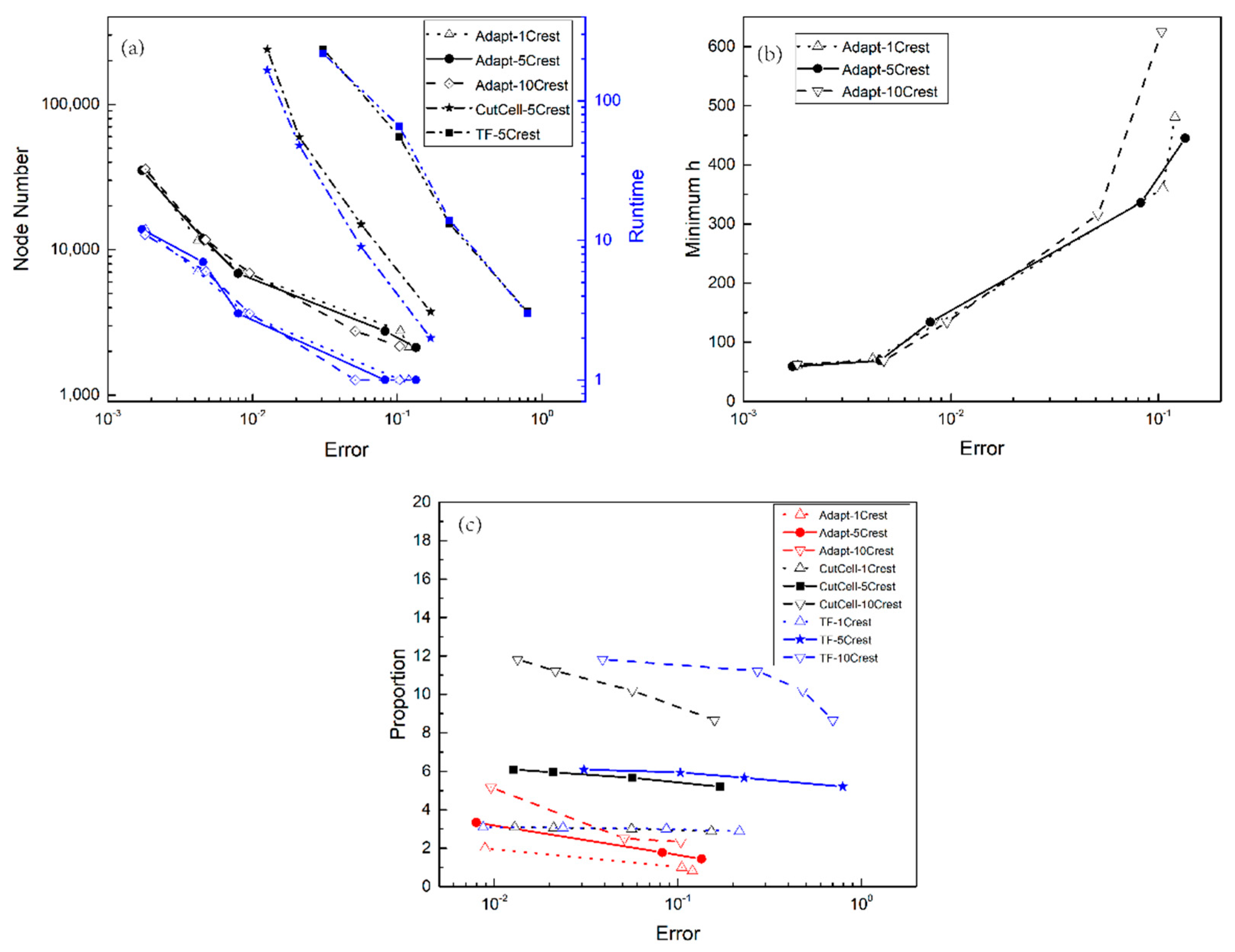
4.2. Mesh Refinement and Central Processing Unit (CPU) Cost
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gal-Chen, T.; Somerville, R.-C. On the use of a coordinate transformation for the solution of the Navier-Stokes equtions. J. Comput. Phys. 1975, 17, 209–228. [Google Scholar] [CrossRef]
- Li, Y.; Wang, B.; Wang, D.; Li, J.; Dong, L. An orthogonal terrain-following coordinate and its preliminary tests using 2-D idealized advection experiments. Geosci. Model Dev. 2014, 7, 1767–1778. [Google Scholar] [CrossRef] [Green Version]
- Phillips, N.A. A coordinate system having some special advantages for numerical forecasting. J. Meteorol. 1957, 14, 184–185. [Google Scholar] [CrossRef]
- Schär, C.; Leuenberger, D.; Fuhrer, O.; L<monospace>ü</monospace>thi, D.; Girard, C. A new terrain-following vertical coordinate formulation for atmospheric prediction models. Mon. Weather Rev. 2002, 130, 2459–2480. [Google Scholar] [CrossRef]
- Shaw, J.; Weller, H. Comparison of terrain-following and cut-cell grids using a nonhydrostatic model. Mon. Weather Rev. 2016, 144, 2085–2099. [Google Scholar] [CrossRef]
- Steppeler, J.; Klemp, J.B. Advection on cut-cell grids for an idealized mountain of constant slope. Mon. Weather Rev. 2017, 145, 1765–1777. [Google Scholar] [CrossRef]
- Zängl, G. A generalized sigma-coordinate system for the MM5. Mon. Weather Rev. 2003, 131, 2875–2884. [Google Scholar] [CrossRef]
- Webster, S.; Brown, A.; Caameron, D.; Jones, C. Improvements to the representation of orography in the Met Office Unified Model. Q. J. R. Meteorol. Soc. 2003, 129, 1989–2010. [Google Scholar] [CrossRef] [Green Version]
- Arakawa, A.; Lamb, V.R. Computational design of the basic dynamical processes of the UCLA general circulation model. Methods Comput. Phys. Adv. Res. Appl. 1997, 17, 173–265. [Google Scholar] [CrossRef]
- Simmons, A.J.; Burridge, D.M. An energy and angular-momentum conserving vertical finite-difference scheme and hybrid vertical coordinates. Mon. Weather Rev. 1981, 109, 758–766. [Google Scholar] [CrossRef]
- Klemp, J.B. A terrain-following coordinate with smoothed coordinate surfaces. Mon. Weather Rev. 2011, 139, 2163–2169. [Google Scholar] [CrossRef]
- Li, C.; Chen, D.; Li, X. A design of height-based terrain-following coordinates in the atmospheric numerical model: Theoretical analysis and idealized tests. Acta Meteorol. Sin. 2012, 70, 1247–1259. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, H. Large-eddy simulations of atmospheric flows over complex terrain using the immersed-boundary method in the Weather Research and Forecasting Model. Bound.-Lay. Meteorol. 2017, 165, 421–445. [Google Scholar] [CrossRef]
- Saiki, E.; Biringen, S. Numerical simulation of a cylinder in uniform flow: Application of a virtual boundary method. J. Comput. Phys. 1996, 123, 450–465. [Google Scholar] [CrossRef]
- Yang, P.; Xiang, J.; Fang, F.; Pavlidis, D.; Pain, C.C. Modelling of fluid-structure interaction with multiphase viscous flows using an immersed-body method. J. Comput. Phys. 2016, 321, 571–592. [Google Scholar] [CrossRef]
- Adcroft, A.; Hill, C.; Marshall, J. Representation of topography by shaved cells in a height coordinate ocean model. Mon. Weather Rev. 1997, 125, 2293–2315. [Google Scholar] [CrossRef]
- Good, B.; Gadian, A.; Lock, S.-J.; Ross, A. Performance of the cut cell method of representing orography in idealized simulations. Atmos. Sci. Lett. 2014, 15, 44–49. [Google Scholar] [CrossRef]
- Steppeler, J.; Bitzer, H.-W.; Minotte, M.; Bonaventura, L. Nonhydrostatic atmospheric modelling using a z-coordinate representation. Mon. Weather Rev. 2002, 130, 2143–2154. [Google Scholar] [CrossRef]
- Yamazaki, H.; Satomura, T. Nonhydrostatic atmospheric modeling using a combined Cartesian grid. Mon. Weather Rev. 2010, 132, 3932–3945. [Google Scholar] [CrossRef]
- Bonaventura, L. A semi-implicit, semi-Lagrangian scheme using the height coordinate for a nonhydrostatic and fully elastic model of atmospheric flows. J. Comput. Phys. 2000, 158, 186–213. [Google Scholar] [CrossRef]
- Yamazaki, H.; Satomura, T. Vertically combined shaved cell method in a z-coordinate non-hydrostatic atmospheric model. Atmos. Sci. Lett. 2008, 9, 171–175. [Google Scholar] [CrossRef]
- Lock, S.J.; Bitzer, H.W.; Coals, A.; Gadian, A.; Mobbs, S. Demostration of a cut-cell representation of 3-D orography for studies of atmospheric flows over steep hills. Mon. Weather Rev. 2012, 140, 411–424. [Google Scholar] [CrossRef]
- Steppeler, J.; Park, S.-H.; Dobler, A. A 5-day hindcast experiment using a cut cell z-coordinate model. Atmos. Sci. Lett. 2011, 12, 340–344. [Google Scholar] [CrossRef] [Green Version]
- Steppeler, J.; Park, S.-H.; Dobler, A. Forecasts covering one month using a cut-cell model. Geosci. Model Dev. 2013, 6, 875–882. [Google Scholar] [CrossRef] [Green Version]
- Steppeler, J.; Bitzer, H.W.; Janjic, Z.; Schättler, U.; Prohl, P.; Gjertsen, U.; Torrisi, L.; Parfinievicz, J.; Avgoustoglou, E.; Damrath, U. Prediction of clouds and rain using a z-coordinate nonhydrostatic model. Mon. Weather Rev. 2006, 134, 3623–3643. [Google Scholar] [CrossRef]
- Yamazaki, H.; Satomura, T.; Nikiforakis, N. Three-dimensional cut-cell modelling for high-resolution atmospheric simulations. Q. J. R. Meteorol. Soc. 2016, 142, 1335–1350. [Google Scholar] [CrossRef] [Green Version]
- Zou, X.; Li, Y.; Li, J.; Wang, B. Advection errors in an orthogonal terrain-following coordinate: Idealized 2-D experiments using steep terrains. Atmos. Sci. Lett. 2016, 17, 243–250. [Google Scholar] [CrossRef]
- Shaw, J.; Weller, H.; Methven, J.; Davies, T. Multidimensional method-of-lines transport for atmospheric flows over steep terrain using arbitrary meshes. J. Comput. Phys. 2017, 344, 86–107. [Google Scholar] [CrossRef]
- Bacon, D.P.; Ahmad, N.N.; Boybeyi, Z.; Dunn, T.J.; Hall, M.S.; Lee, P.C.S.; Sarma, R.A.; Turner, M.D. A dynamically adapting weather and dispersion model: The Operational Multiscale Environment Model with Grid Adaptivity (OMEGA). Mon. Weather Rev. 1999, 128, 2044–2076. [Google Scholar] [CrossRef]
- Cullen, M.J. Integrations of the primitive equations on a sphere using the finite element method. Q. J. R. Meteorol. Soc. 1974, 100, 555–562. [Google Scholar] [CrossRef]
- Läuter, M.; Giraldo, F.X.; Handorf, D.; Dethloff, K. A discontinuous Galerkin method for the shallow water equations in spherical triangular coordinates. J. Comput. Phys. 2008, 227, 10226–10242. [Google Scholar] [CrossRef] [Green Version]
- Läuter, M.; Handorf, D.; Rakowsky, N.; Behrens, J.; Frickenhaus, S.; Best, M.; Dethloffa, K.; Hiller, W. A parallel adaptive barotropic model of the atmosphere. J. Comput. Phys. 2007, 223, 609–628. [Google Scholar] [CrossRef] [Green Version]
- Pain, C.; Piggott, M.D.; Goddard, A.J.H.; Fang, F.; Gorman, G.J.; Marshall, D.P.; Eaton, M.D.; Power, P.W.; Oliveira, C.R.E. Three-dimensional unstructured mesh ocean modelling. Ocean Model. 2005, 10, 5–33. [Google Scholar] [CrossRef]
- Piggott, M.; FarrelL, P.; Wilson, C.; Gorman, G.; Pain, C.C. Anisotropic mesh adaptivity for multi-scale ocean modelling. Philos. Trans. R. Soc. A 2009, 367, 4591–4611. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Staniforth, A.N.; Mitchell, H.L. A variable-resolution finite-element technique for regional forecasting with the primitive equations. Mon. Weather Rev. 1978, 106, 439–447. [Google Scholar] [CrossRef]
- Zheng, J.; Zhu, J.; Wang, Z.; Fang, F.; Pain, C.C.; Xiang, J. Towards a new multiscale air quality transport model using the fully unstructured anisotropic adaptive mesh technology of Fluidity (version 4.1.9). Geosci. Model Dev. 2015, 8, 3421–3440. [Google Scholar] [CrossRef]
- Iselin, J.P. Dynamic Grid Adaptation Using the MPDATA Scheme. Mon. Weather Rev. 2002, 130, 1026–1039. [Google Scholar] [CrossRef] [Green Version]
- Weller, H.; Browne, P.; Budd, C.; Cullen, M. Mesh adaptation on the sphere using optimal transport and the numerical solution of a Monge–Ampère type equation. J. Comput. Phys. 2015, 308, 102–123. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zeng, Q.C. The preliminary application of adaptive mesh in the problems of atmosphere and ocean. Sci. Atmos. Sin. 1994, 18, 641–648. [Google Scholar] [CrossRef]
- Liu, Z.; Zeng, Q.C. The application of time-dependent adaptive mesh model in the typhoon track prediction. Sci. Atmos. Sin. 1995, 19, 301–308. [Google Scholar] [CrossRef]
- Pain, C.C.; Umpleby, A.; Oliveira, C.D.; Goddard, A. Tetrahedral mesh optimisation and adaptivity for steady-state and transient finite element calculations. Comput. Methods Appl. Mech. Eng. 2001, 190, 3771–3796. [Google Scholar] [CrossRef]
- Farrell, P.; Piggott, M.; Pain, C.C.; Gorman, G.; Wilson, C. Conservative interpolation between unstructured meshes via supermesh construction. Comput. Methods Appl. Mech. Eng. 2009, 198, 2632–2642. [Google Scholar] [CrossRef]
- Bristeau, M.; Glowinski, R.; Periaux, J. Numerical methods for the Navier–Stokes equations: Applications to the simulation of compressible and incompressible viscous flows. Comput. Phys. Rep. 1987, 6, 73–187. [Google Scholar] [CrossRef]
- Crank, J.; Nicolson, P. A practical method for numerical evaluation of solutions of partial differential equations of the heat conduction type. Proc. Camb. Philos. Soc. 1947, 43, 50–64. [Google Scholar] [CrossRef]
- Applied Modelling and Computation Group. Fluidity Manual (Version 4.1.22); Imperial College London: London, UK, 2017; pp. 35–36. [Google Scholar]
- Dangui-Mbani, U.; Sui, J.; Ming, C.; Zheng, L.; Chen, G. Heat transfer analysis for a free boundary problem arising in n-diffusion equation. J. Prop. Power 2016, 5, 261–266. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Cases | Cut-Cell Mesh | TF Mesh | Adaptive Mesh | ||||
|---|---|---|---|---|---|---|---|
| Middle | End | Middle | End | Middle | End | ||
| Case I | 3.06 × 10−2 | 3.96 × 10−2 | 1.09 × 10−1 | 1.69 × 10−1 | 1.03 × 10−3 | 1.46 × 10−3 | |
| Case II | 1.12 × 10−1 | 1.51 × 10−1 | 3.82 × 10−2 | 4.50 × 10−2 | 3.49 × 10−3 | 3.07 × 10−3 | |
| Case III | III-1 | 1.56 × 10−2 | 1.78 × 10−2 | 5.62 × 10−2 | 7.01 × 10−2 | 1.44 × 10−3 | 2.34 × 10−3 |
| III-2 | 1.56 × 10−2 | 1.78 × 10−2 | 5.15 × 10−2 | 7.01 × 10−2 | 1.09 × 10−3 | 1.57 × 10−3 | |
| III-3 | 9.13 × 10−2 | 1.15 × 10−1 | 2.70 × 10−1 | 3.67 × 10−1 | 4.44 × 10−3 | 3.48 × 10−3 | |
| Case IV | IV-1 | 3.05 × 10−2 | 3.99 × 10−2 | 3.77 × 10−2 | 5.59 × 10−2 | 1.03 × 10−3 | 1.43 × 10−3 |
| IV-2 | 3.06 × 10−2 | 3.96 × 10−2 | 1.09 × 10−1 | 1.69 × 10−1 | 1.03 × 10−3 | 1.46 × 10−3 | |
| IV-3 | 3.03 × 10−2 | 3.97 × 10−2 | 3.72 × 10−1 | 5.40 × 10−1 | 1.05 × 10−3 | 1.45 × 10−3 | |
| Case V | / | / | 4.70 × 10−2 | 4.36 × 10−2 | 3.87 × 10−3 | 4.12 × 10−3 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Zheng, J.; Zhu, J.; Fang, F.; Pain, C.C.; Steppeler, J.; Navon, I.M.; Xiao, H. Performance of Adaptive Unstructured Mesh Modelling in Idealized Advection Cases over Steep Terrains. Atmosphere 2018, 9, 444. https://doi.org/10.3390/atmos9110444
Li J, Zheng J, Zhu J, Fang F, Pain CC, Steppeler J, Navon IM, Xiao H. Performance of Adaptive Unstructured Mesh Modelling in Idealized Advection Cases over Steep Terrains. Atmosphere. 2018; 9(11):444. https://doi.org/10.3390/atmos9110444
Chicago/Turabian StyleLi, Jinxi, Jie Zheng, Jiang Zhu, Fangxin Fang, Christopher. C. Pain, Jürgen Steppeler, Ionel M. Navon, and Hang Xiao. 2018. "Performance of Adaptive Unstructured Mesh Modelling in Idealized Advection Cases over Steep Terrains" Atmosphere 9, no. 11: 444. https://doi.org/10.3390/atmos9110444