

Visual Perception Optimization of Residential Landscape Spaces in Cold Regions Using Virtual Reality and Machine Learning


Abstract
1. Introduction
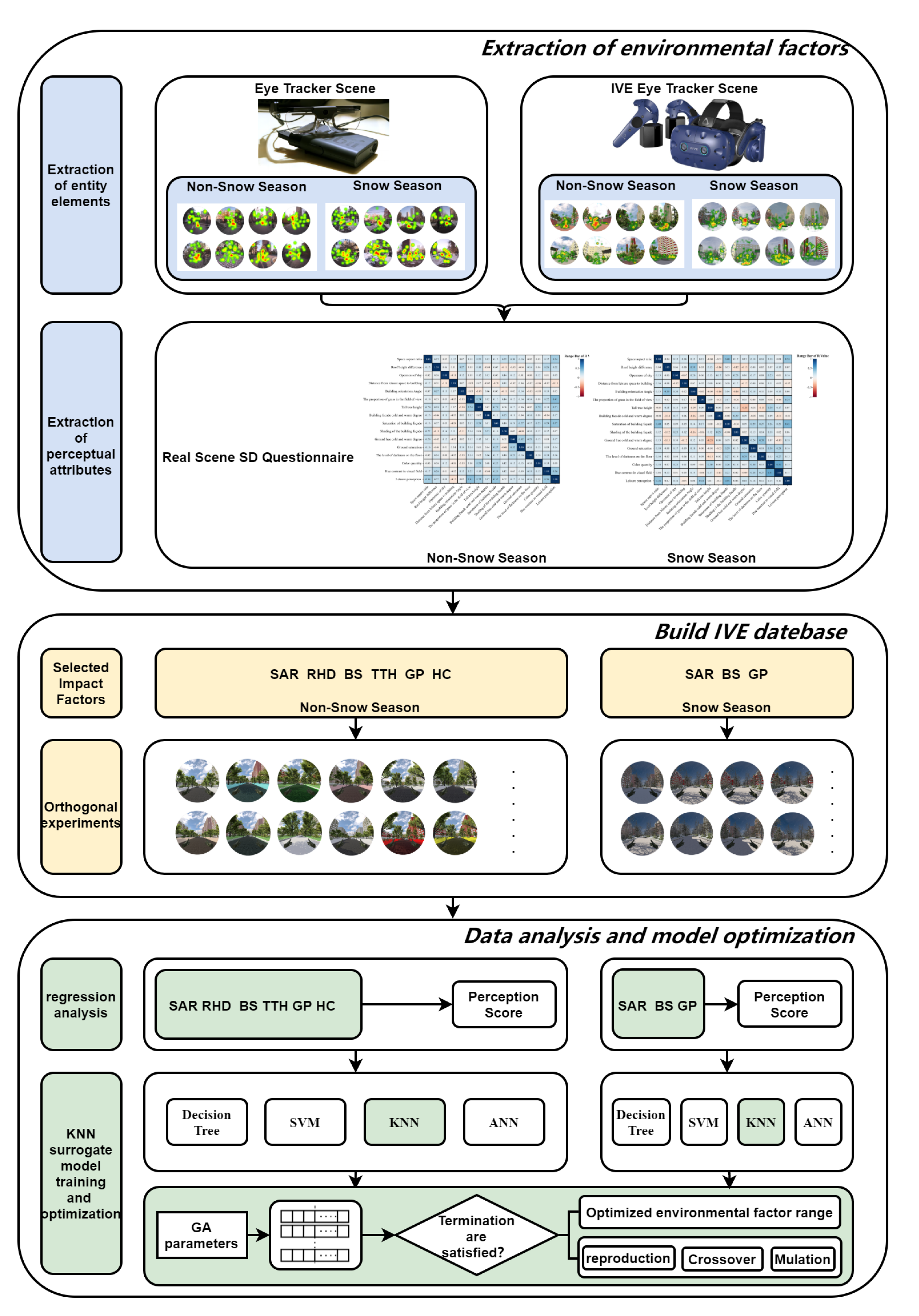
- This research will reveal the correlation of inter-house landscape design factors with the landscape visual perception scores (W).
- In non-snow and snow seasons, the influence of the landscape design factors on inter-house landscape visual perception scores (W) will be illustrated in this paper.
- By GA combined with KNN, the thresholds of inter-house landscape factors are calculated, and the landscape optimization design method will be shown.
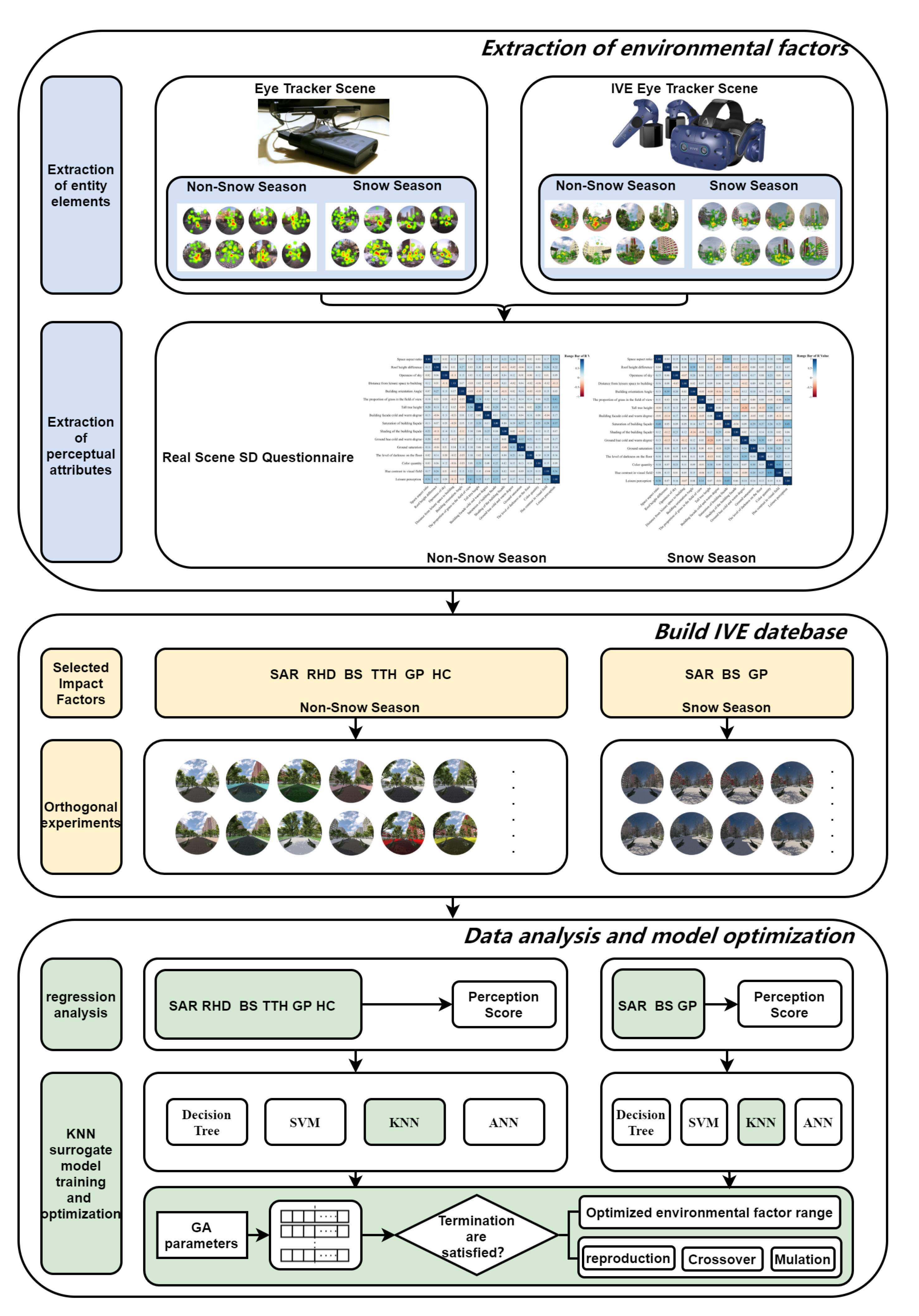
2. Materials and Methods
2.1. Study Area
2.2. SD Questionnaire
2.2.1. SD Questionnaire Focus
2.2.2. SD Questionnaire Settings
2.2.3. Participants of the SD Questionnaire Survey
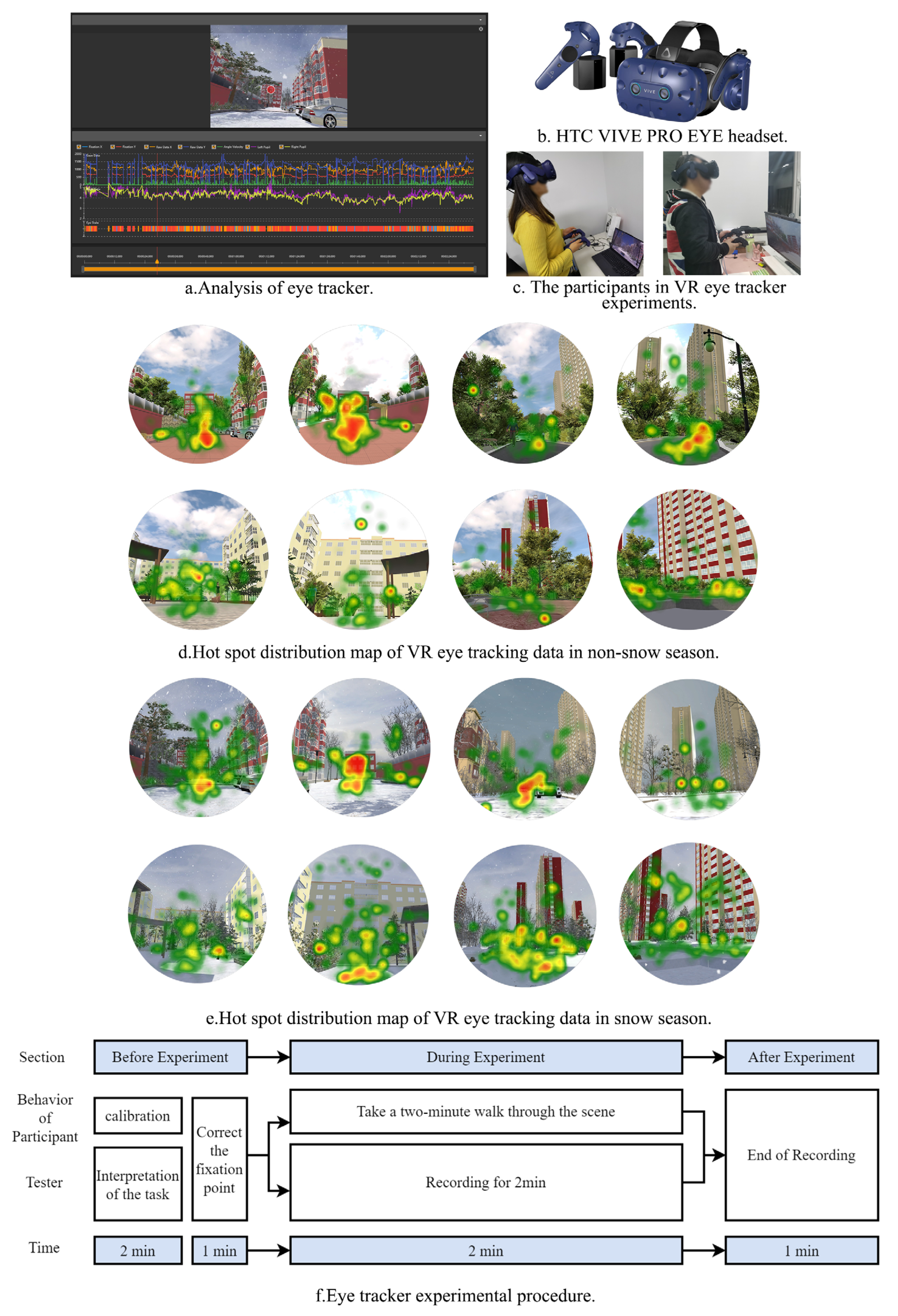
2.3. Eye Tracker
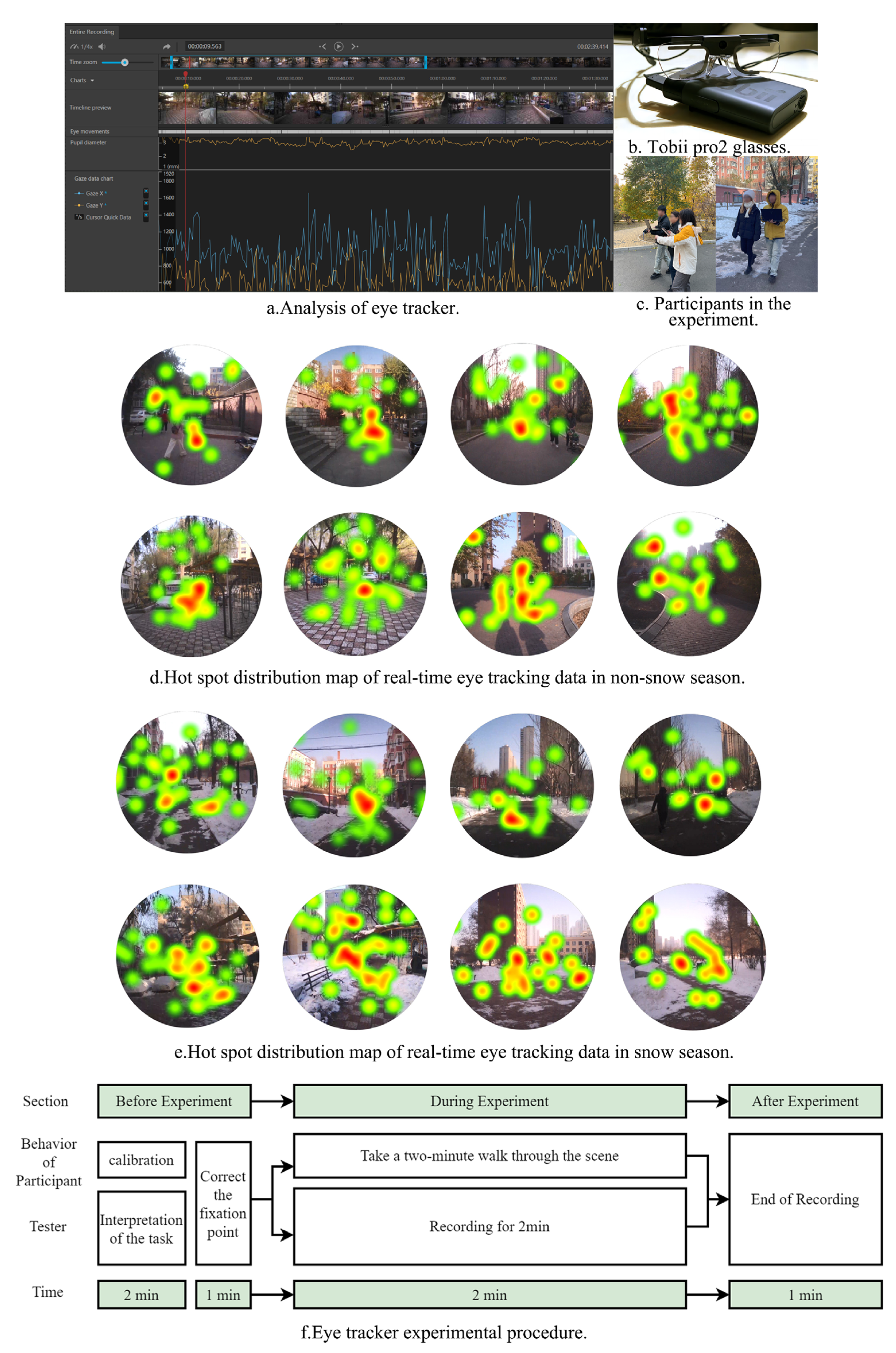
2.3.1. Real Scene Eye Tracker
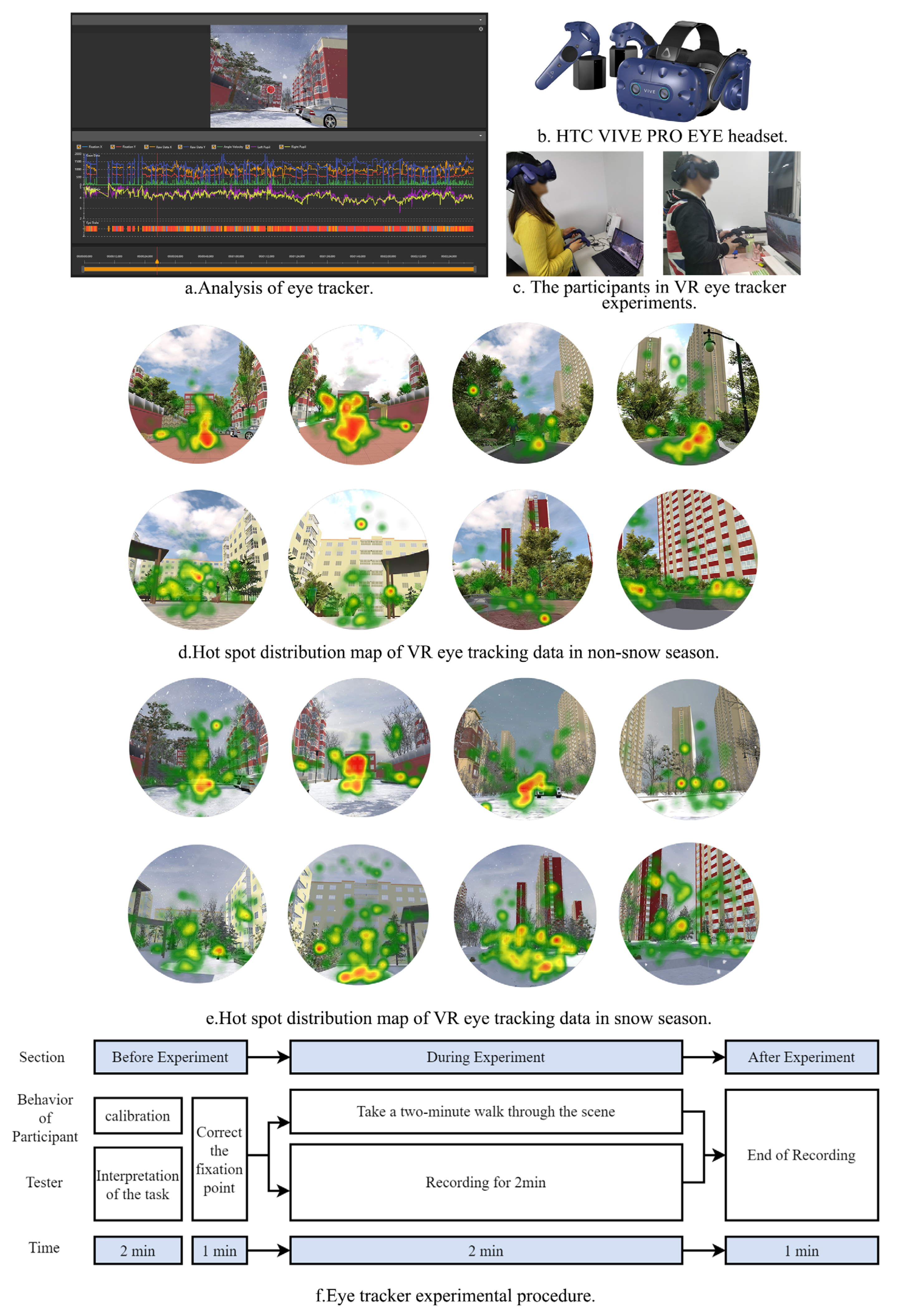
2.3.2. VR Eye Tracker
2.4. Orthogonal Experiment
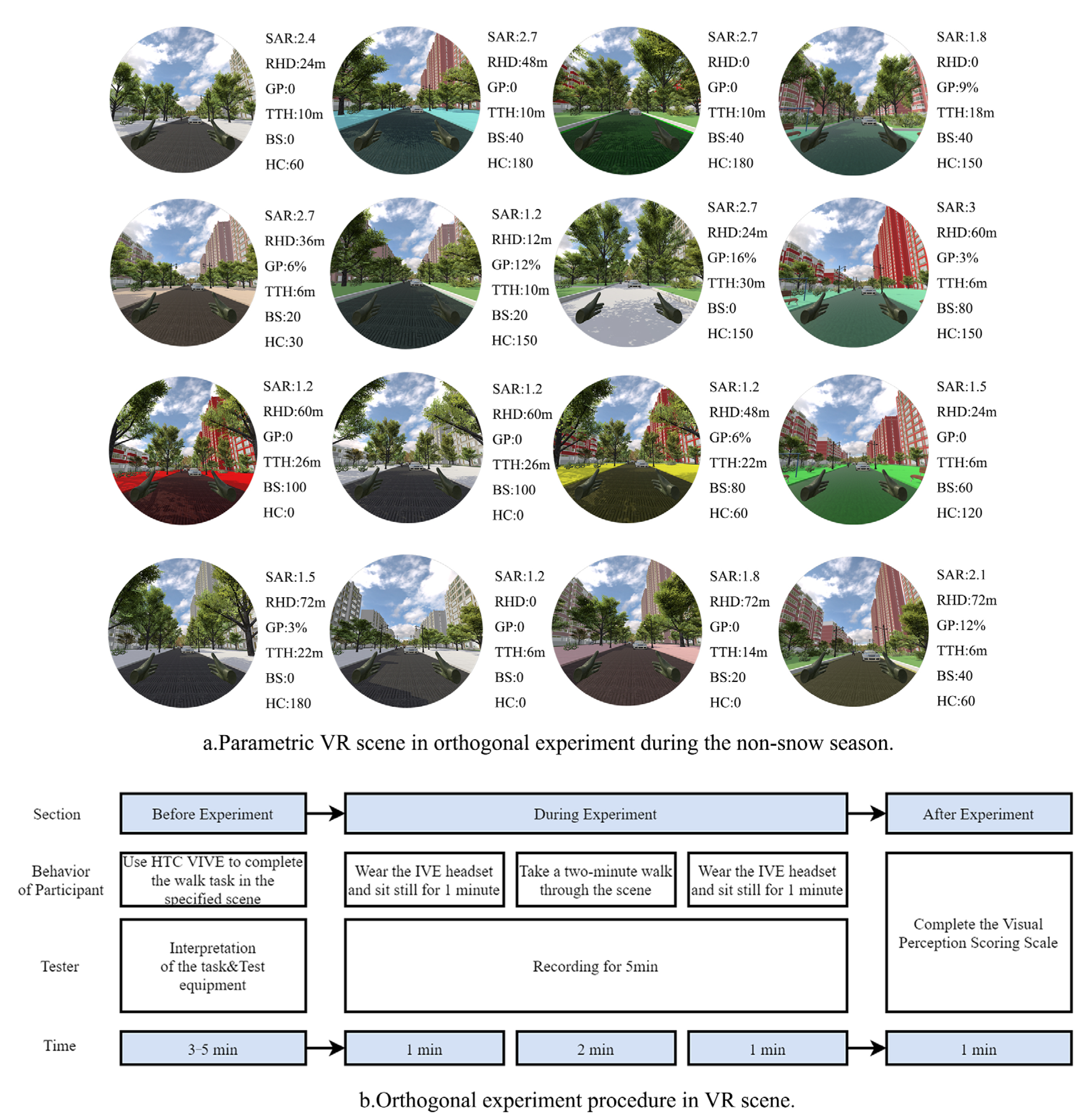
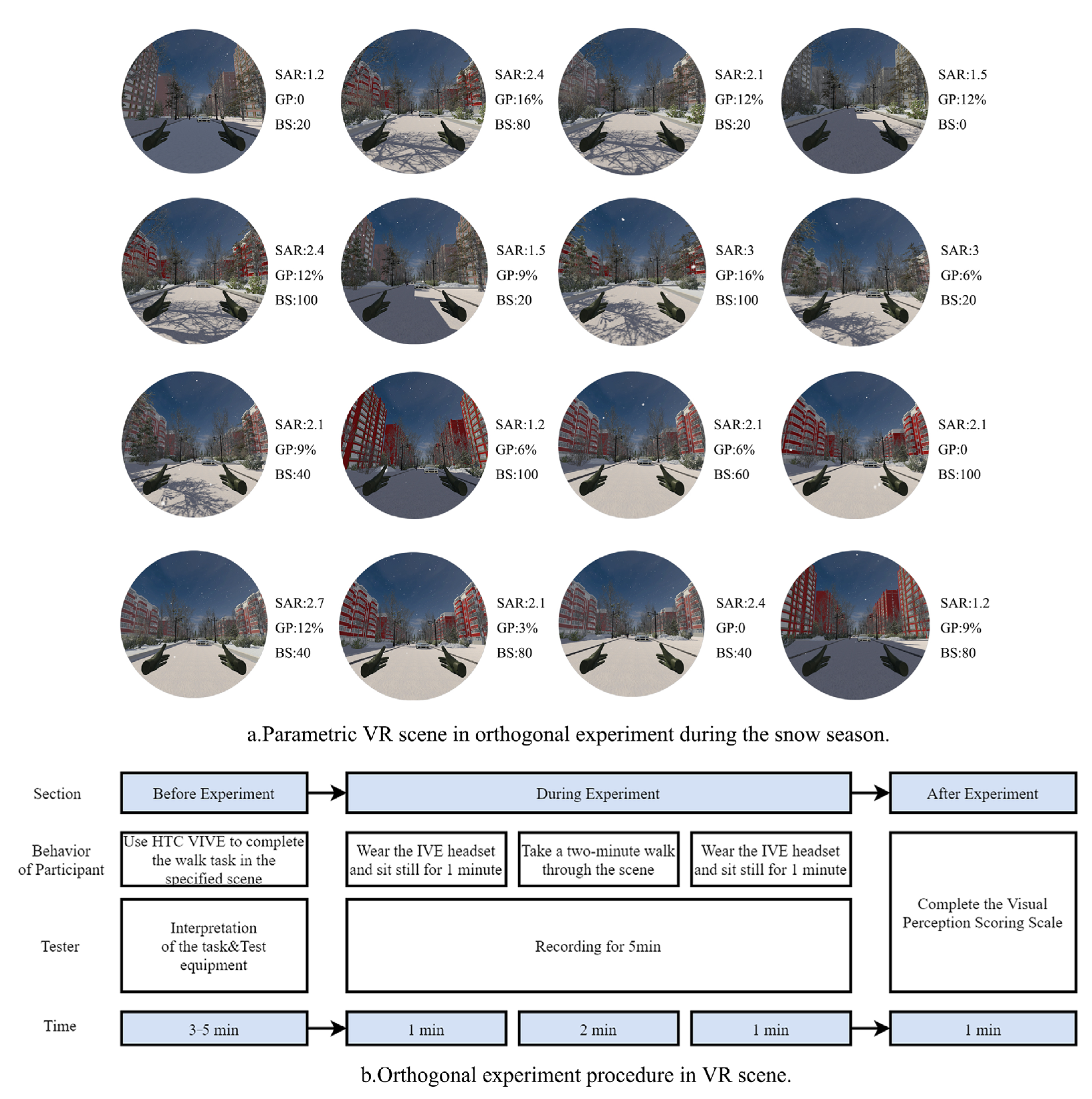
2.4.1. Orthogonal Experimental Setup
2.4.2. Orthogonal Experiment Procedure
2.5. Machine Learning and Genetic Algorithms
2.5.1. Machine Learning
2.5.2. Genetic Algorithm
3. Results
3.1. Identification of Important Factors Influencing Visual Perception
3.1.1. SD Questionnaire Element Screening
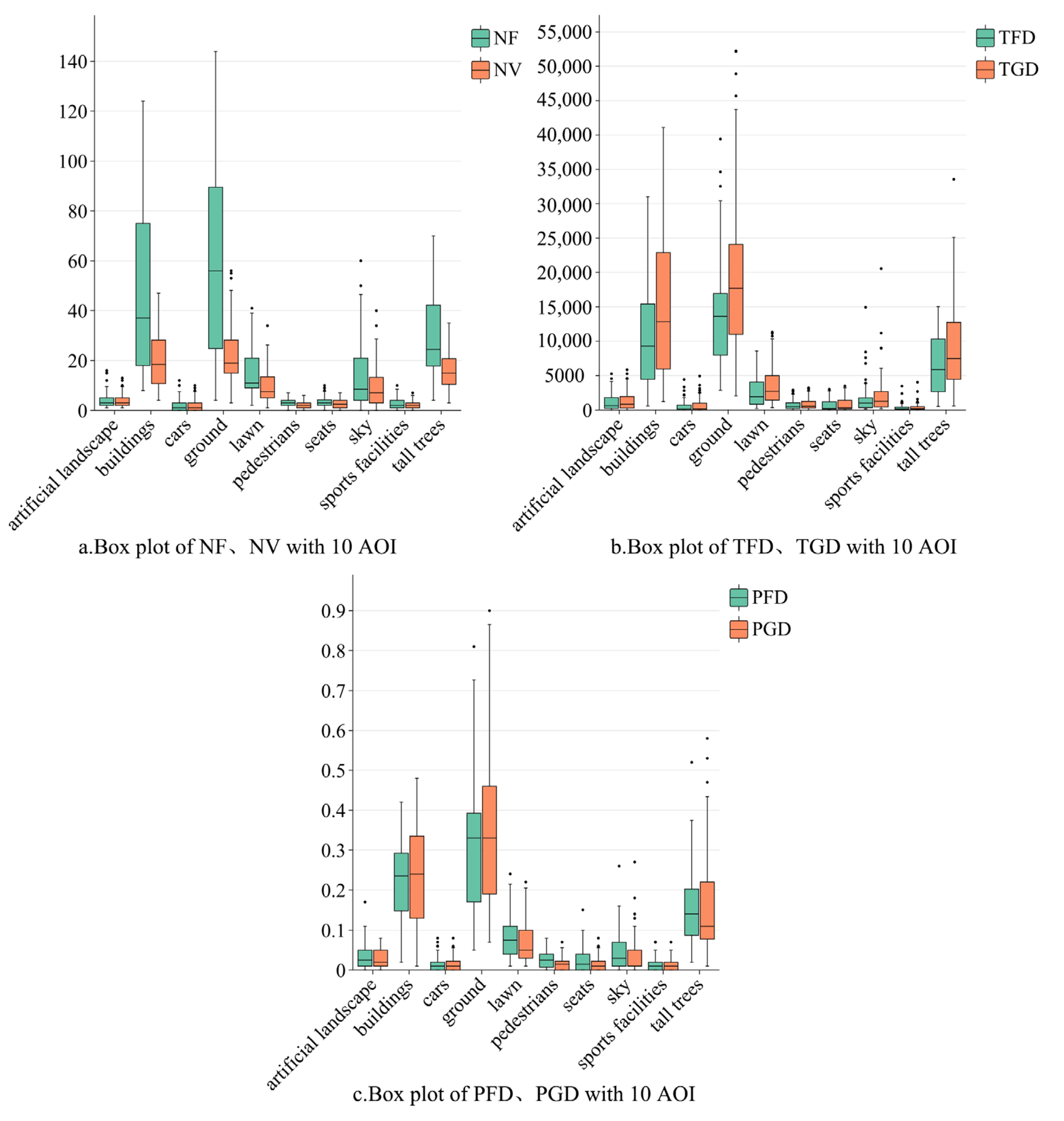
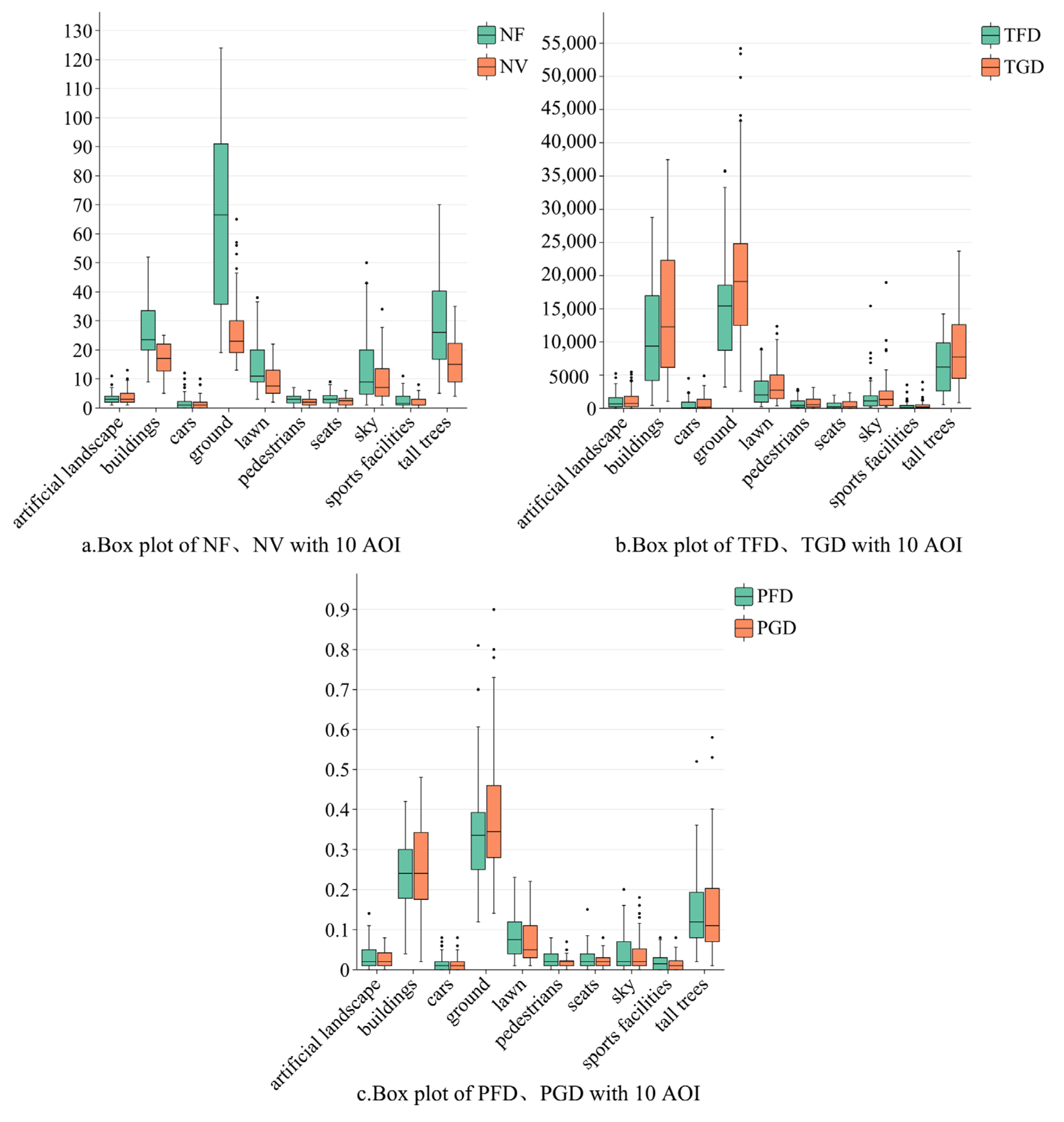
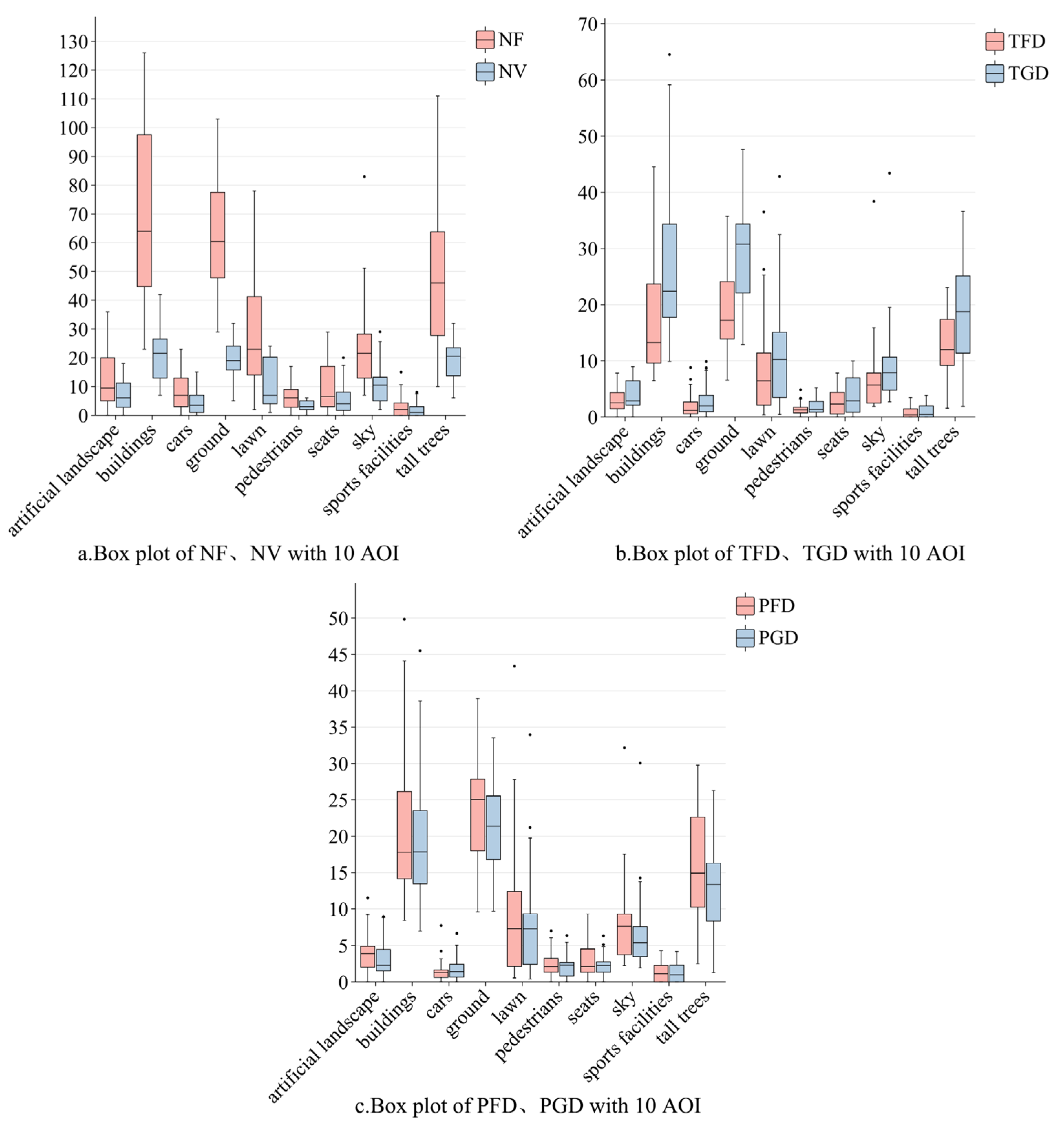
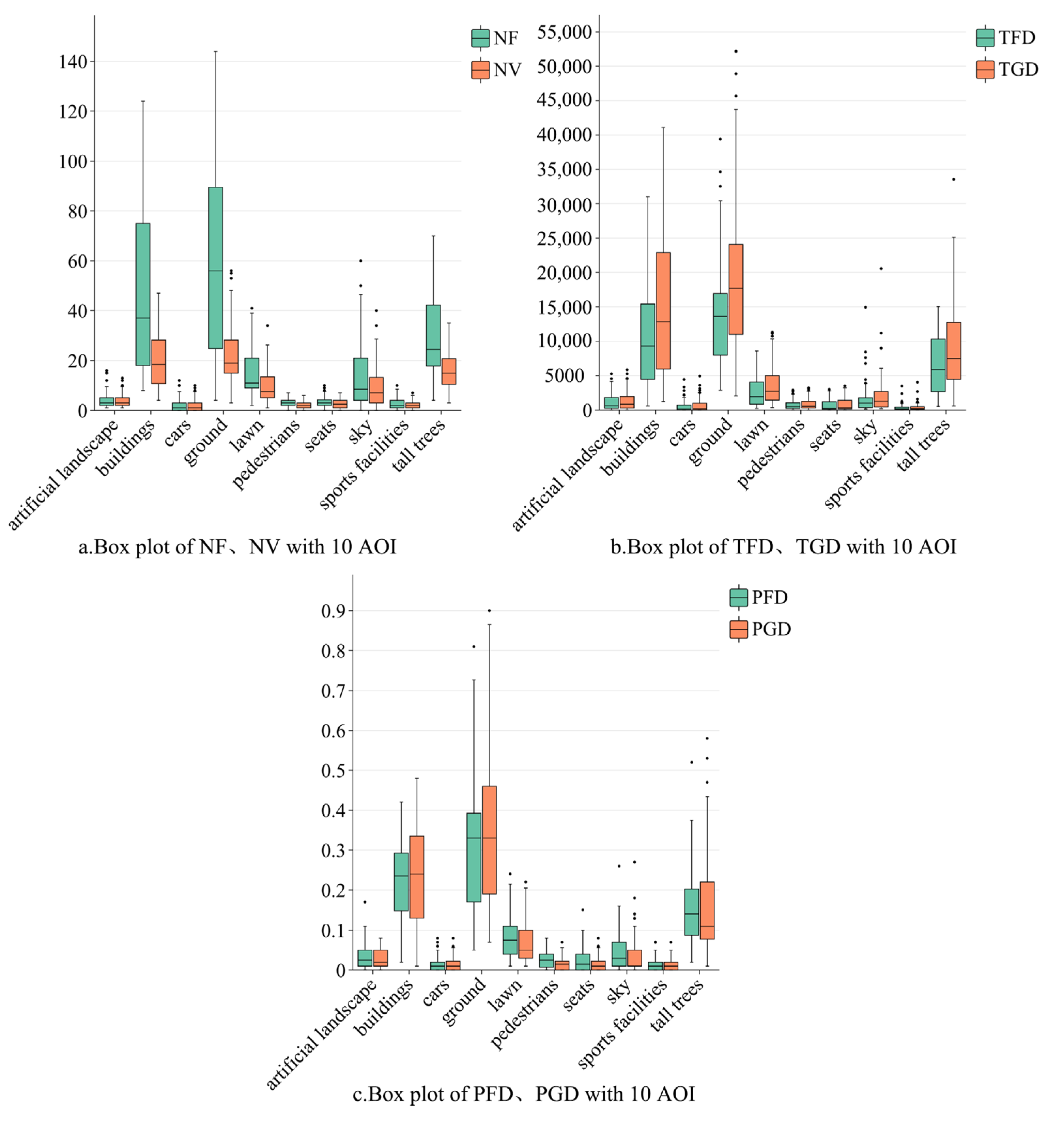
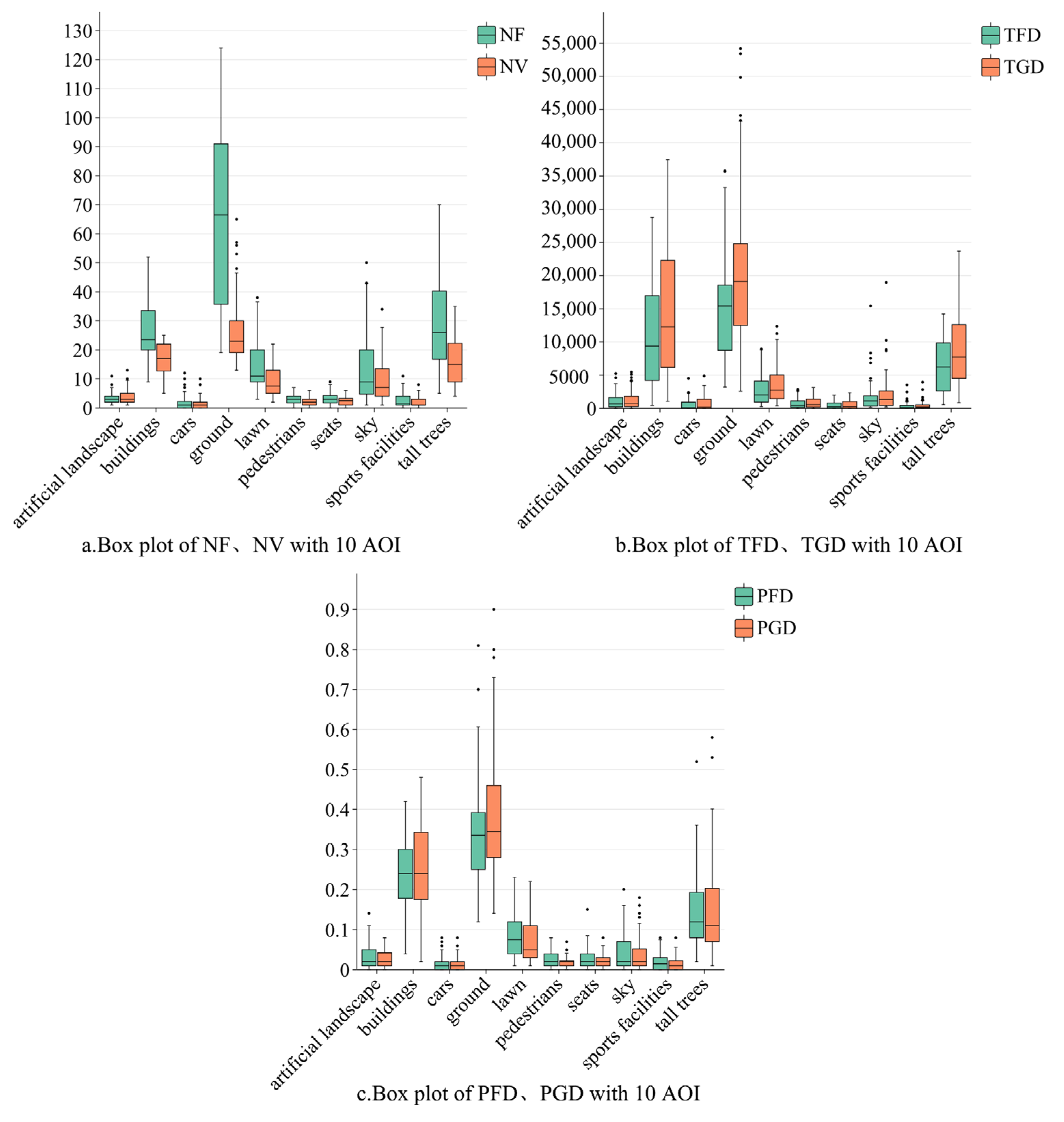
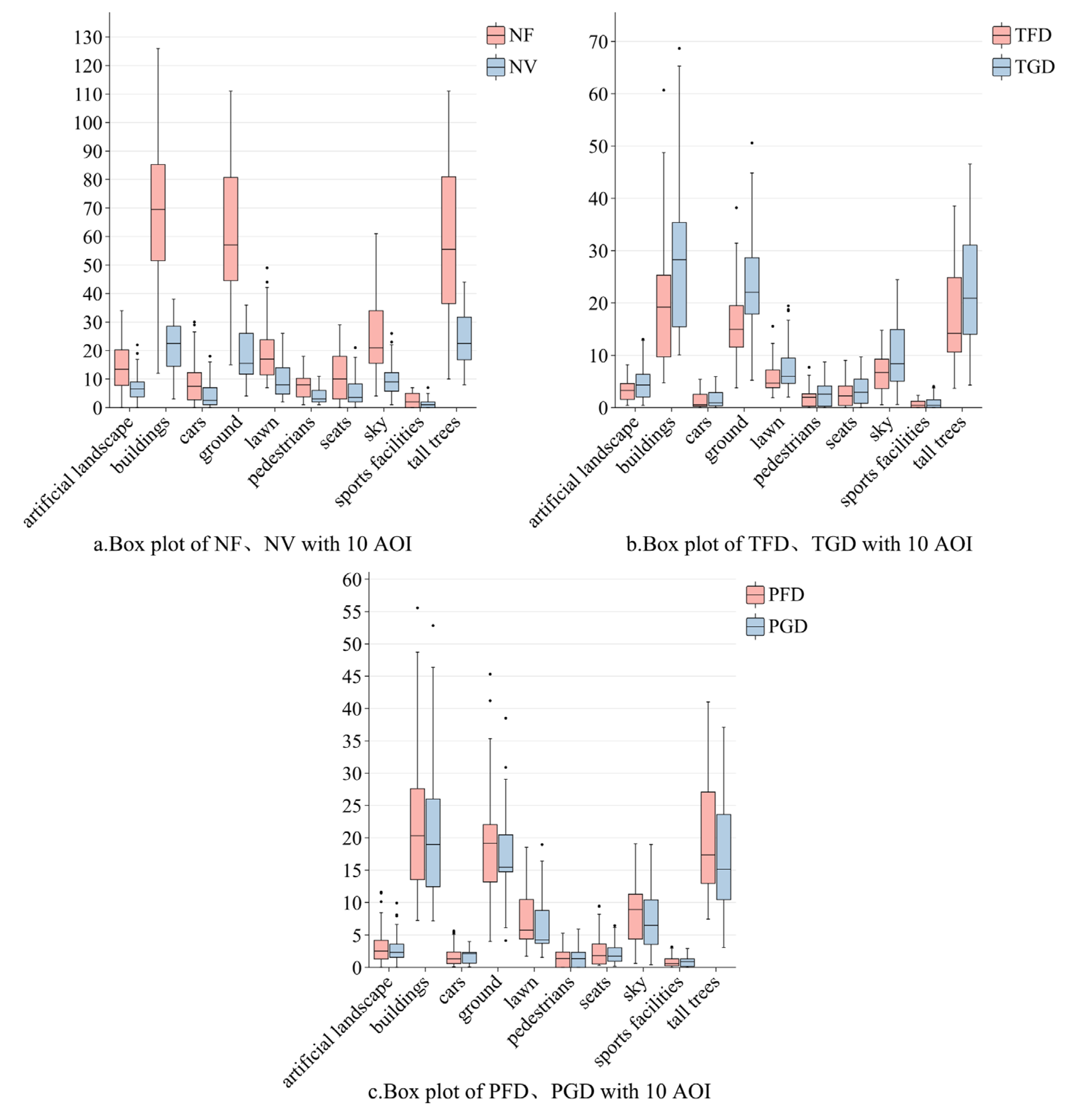
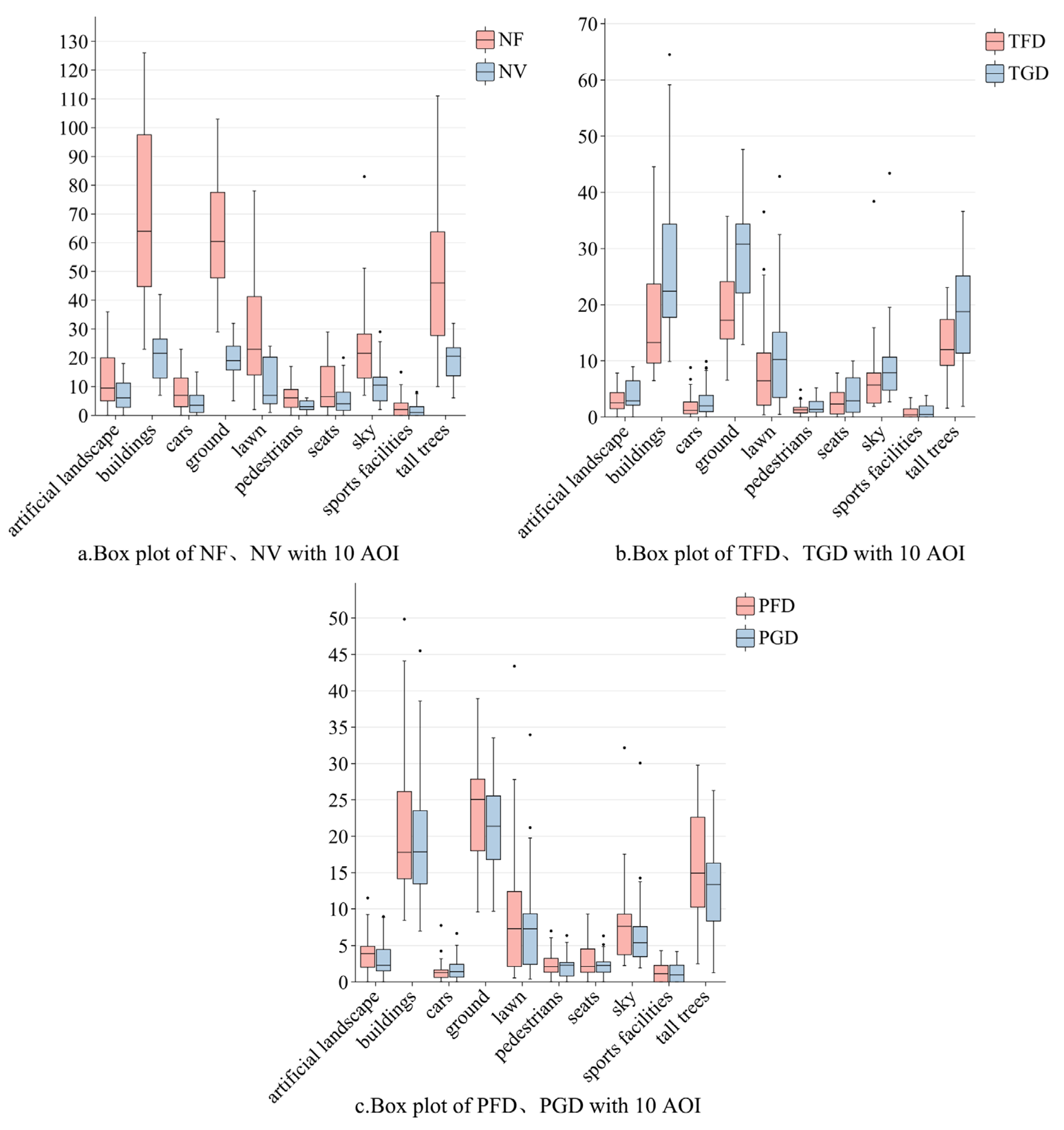
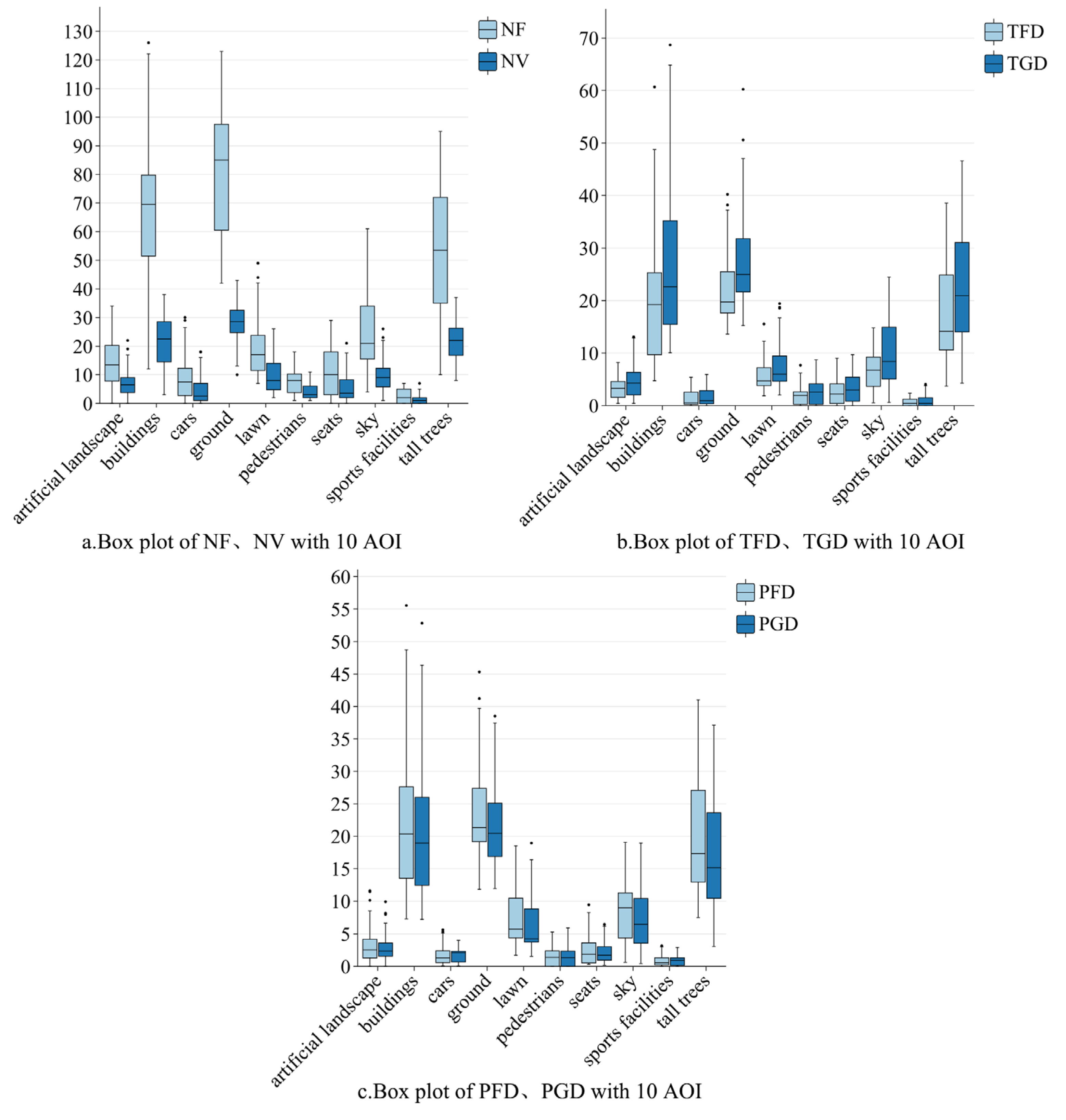
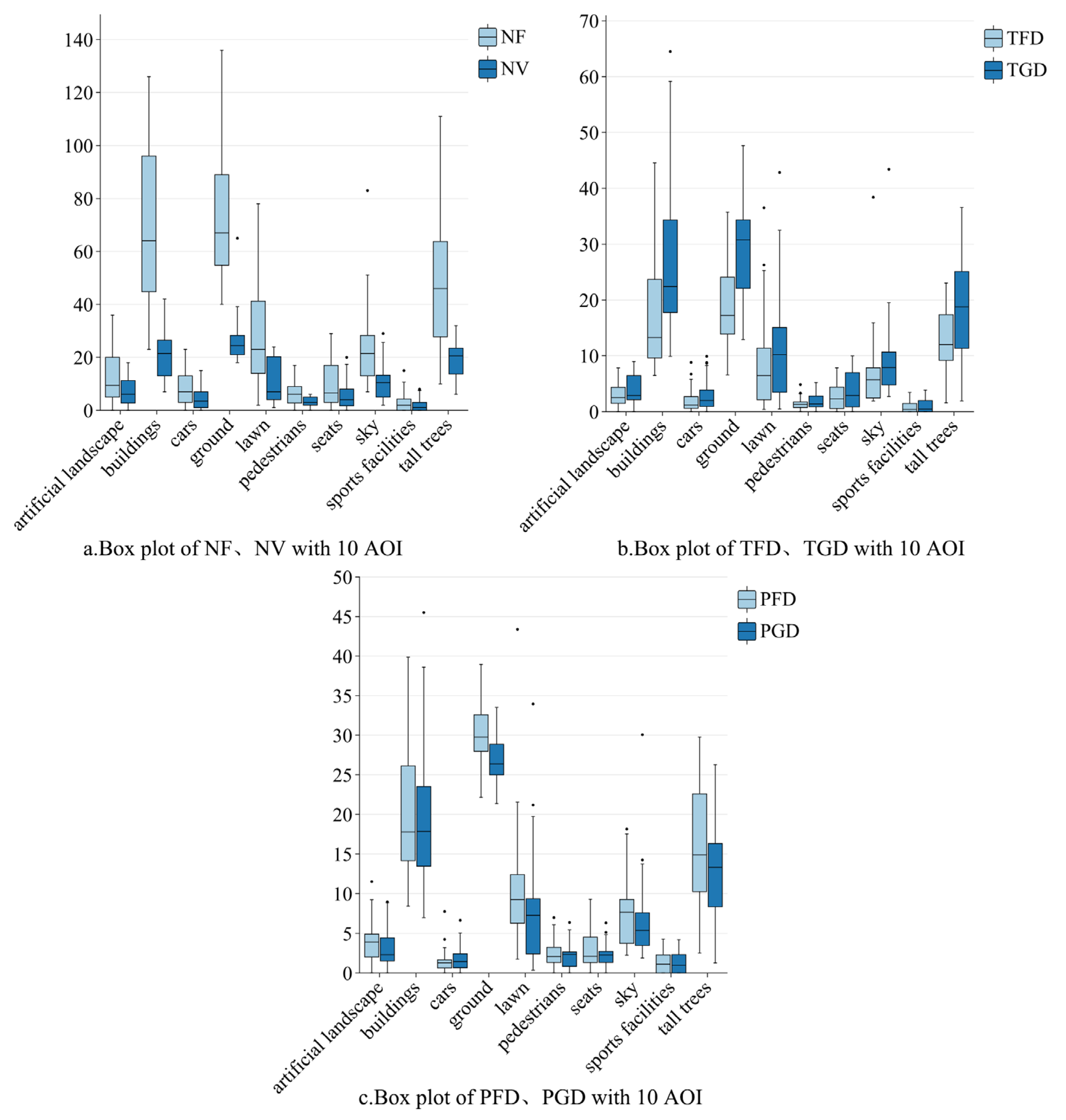
3.1.2. Eye Tracker Interest Point Screening
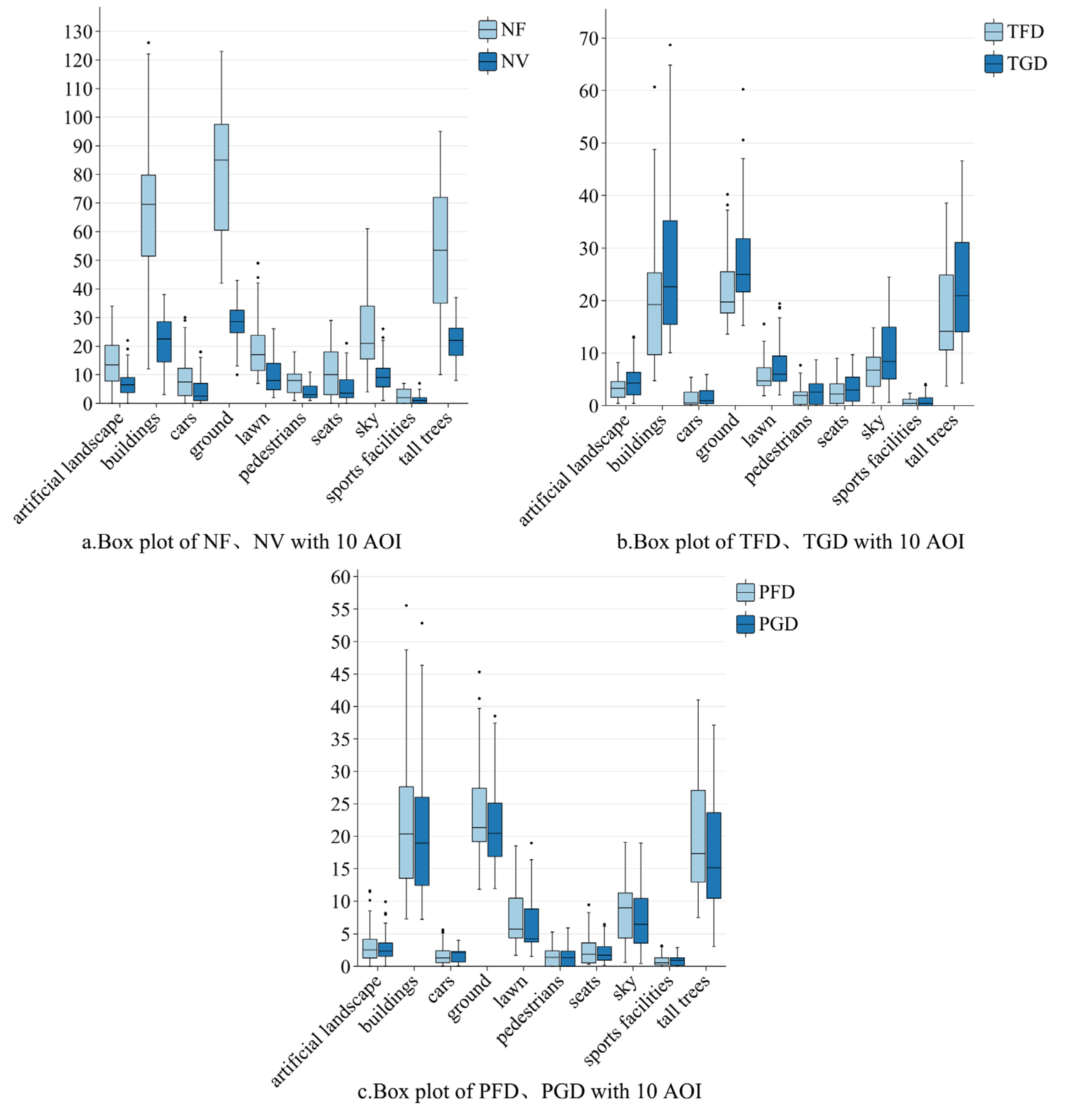
3.1.3. VR Eye-Tracking Verification
3.2. Influence Mechanism
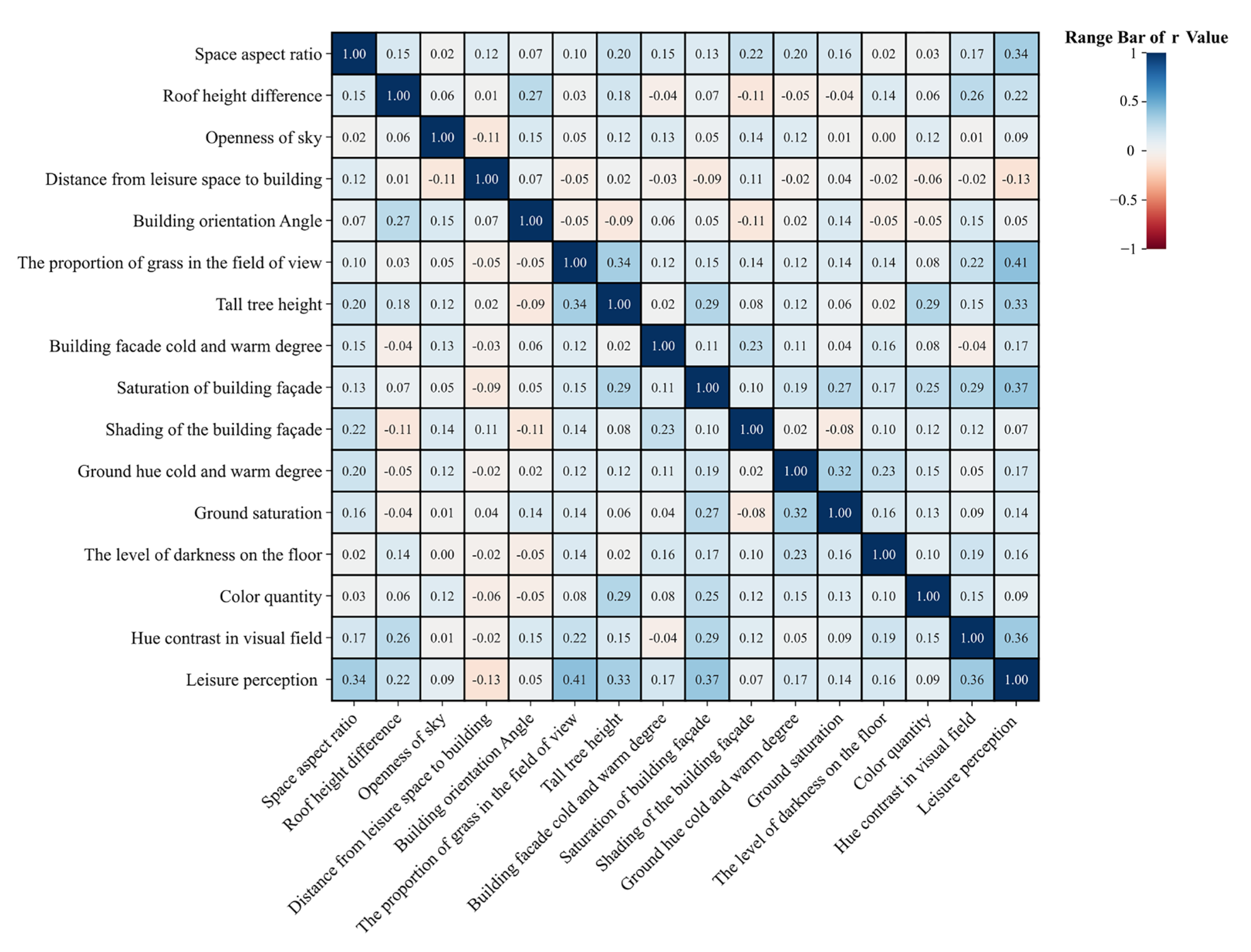
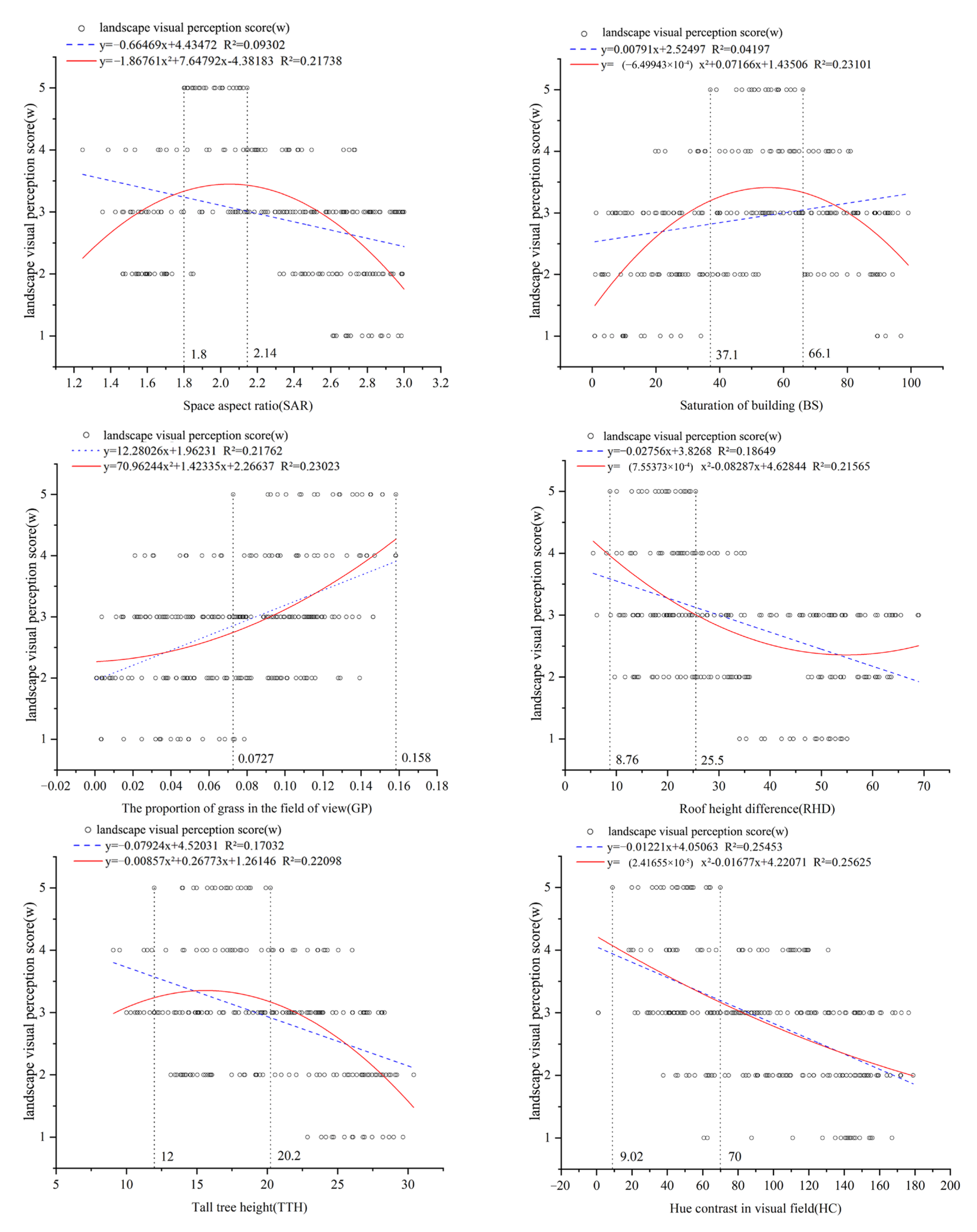
3.2.1. Influence Mechanism of Environmental Factors in Non-Snow Season
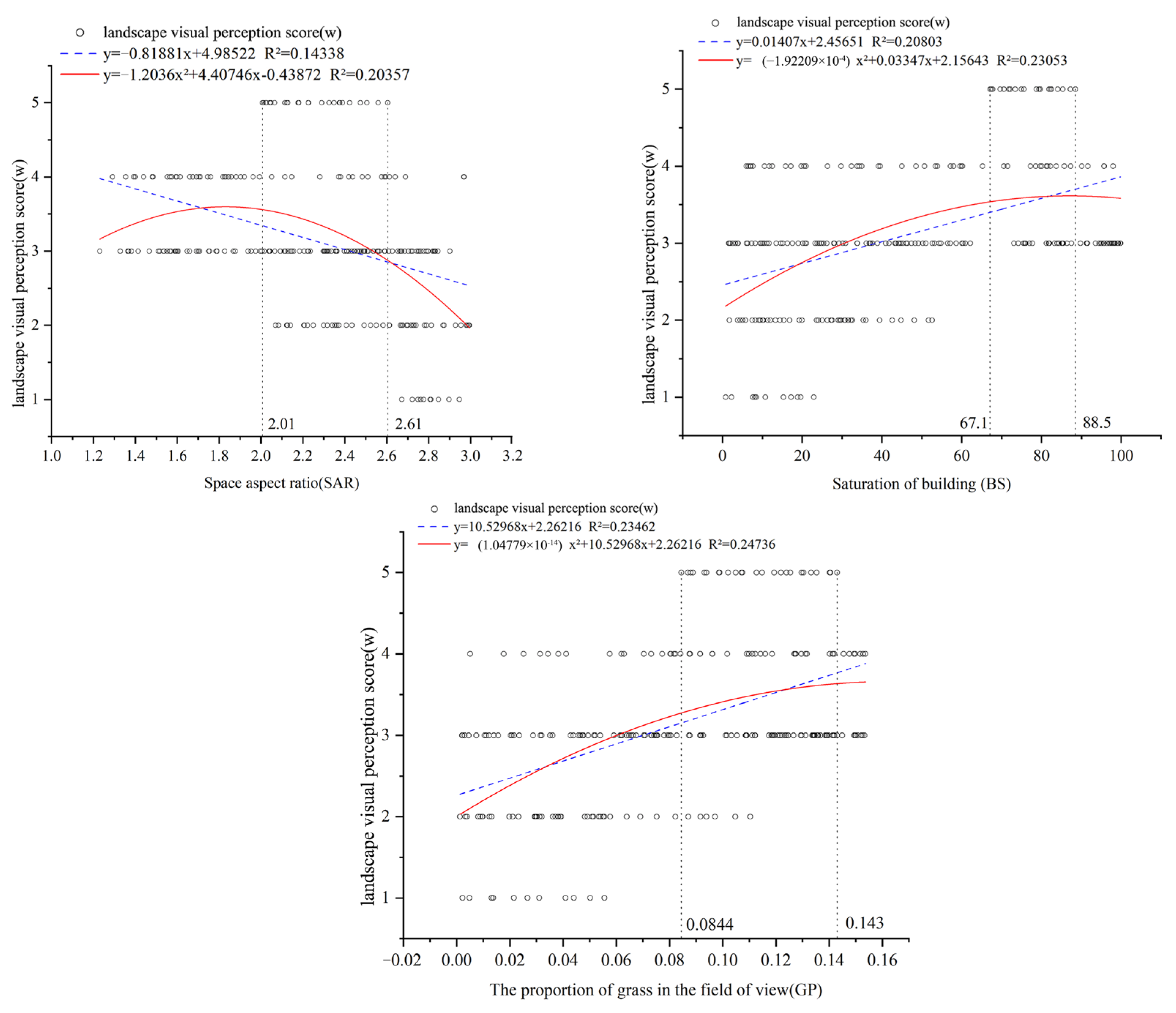
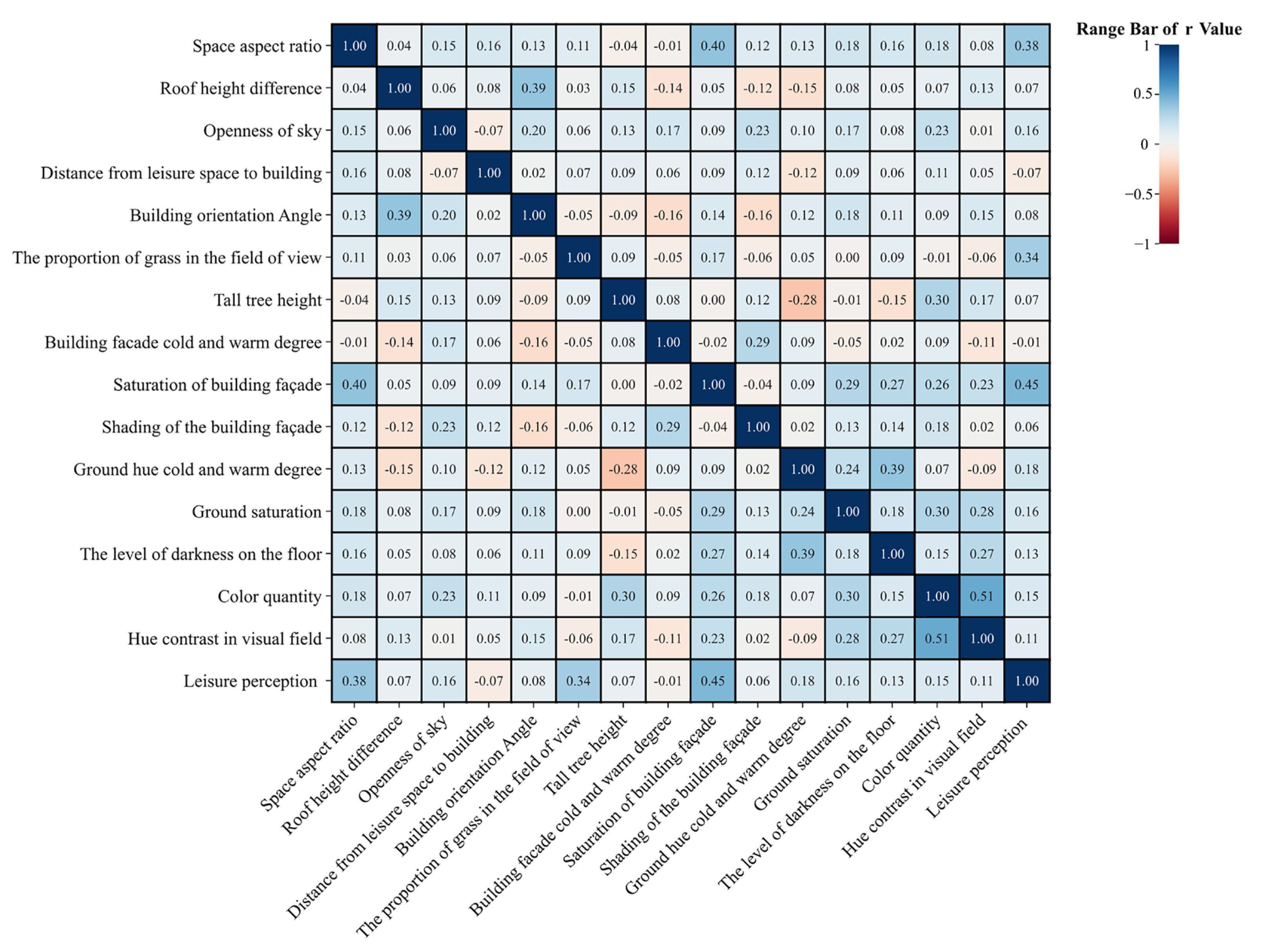
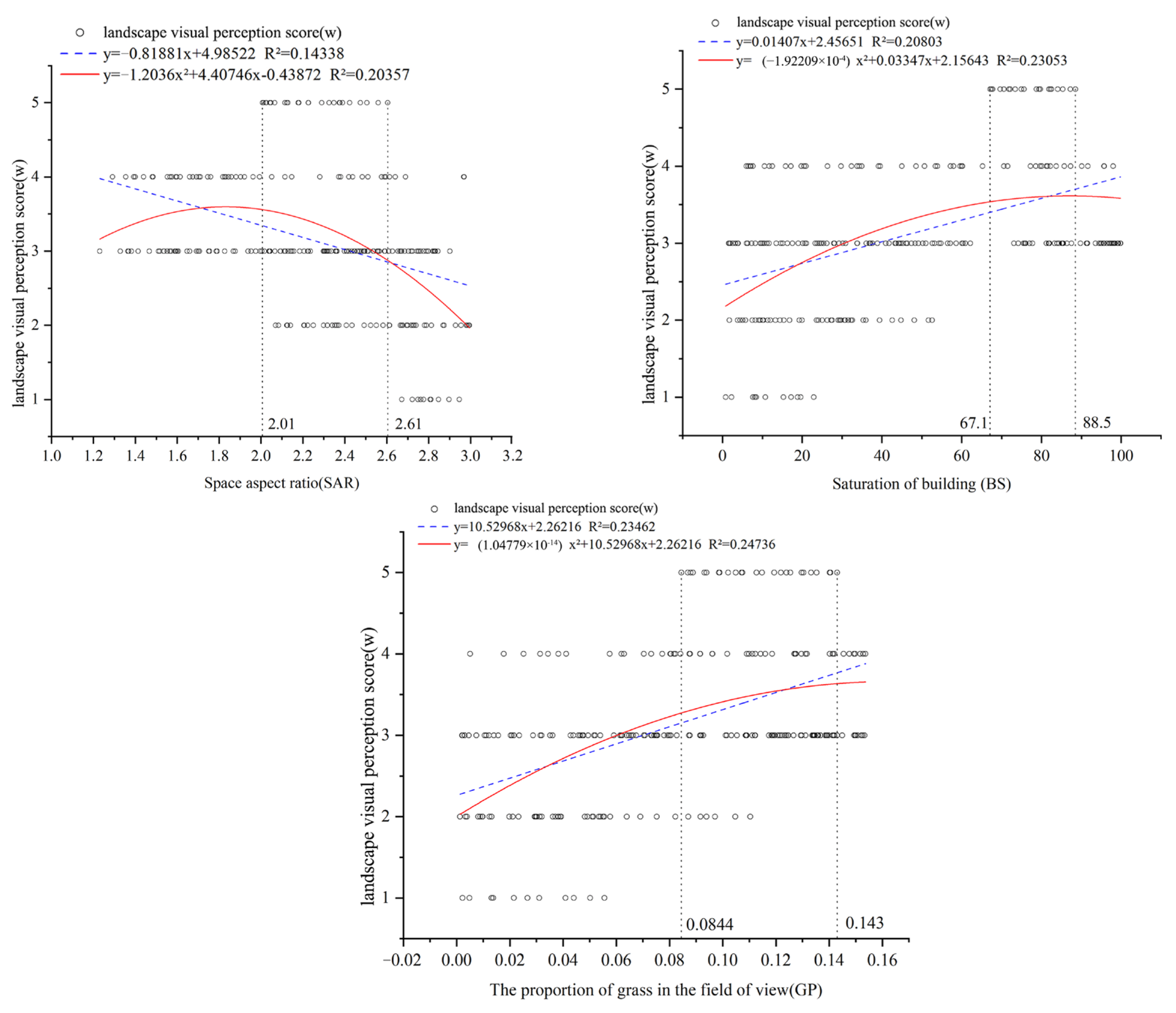
3.2.2. Influence Mechanism of Environmental Factors in Snow Season
3.3. Threshold Optimization
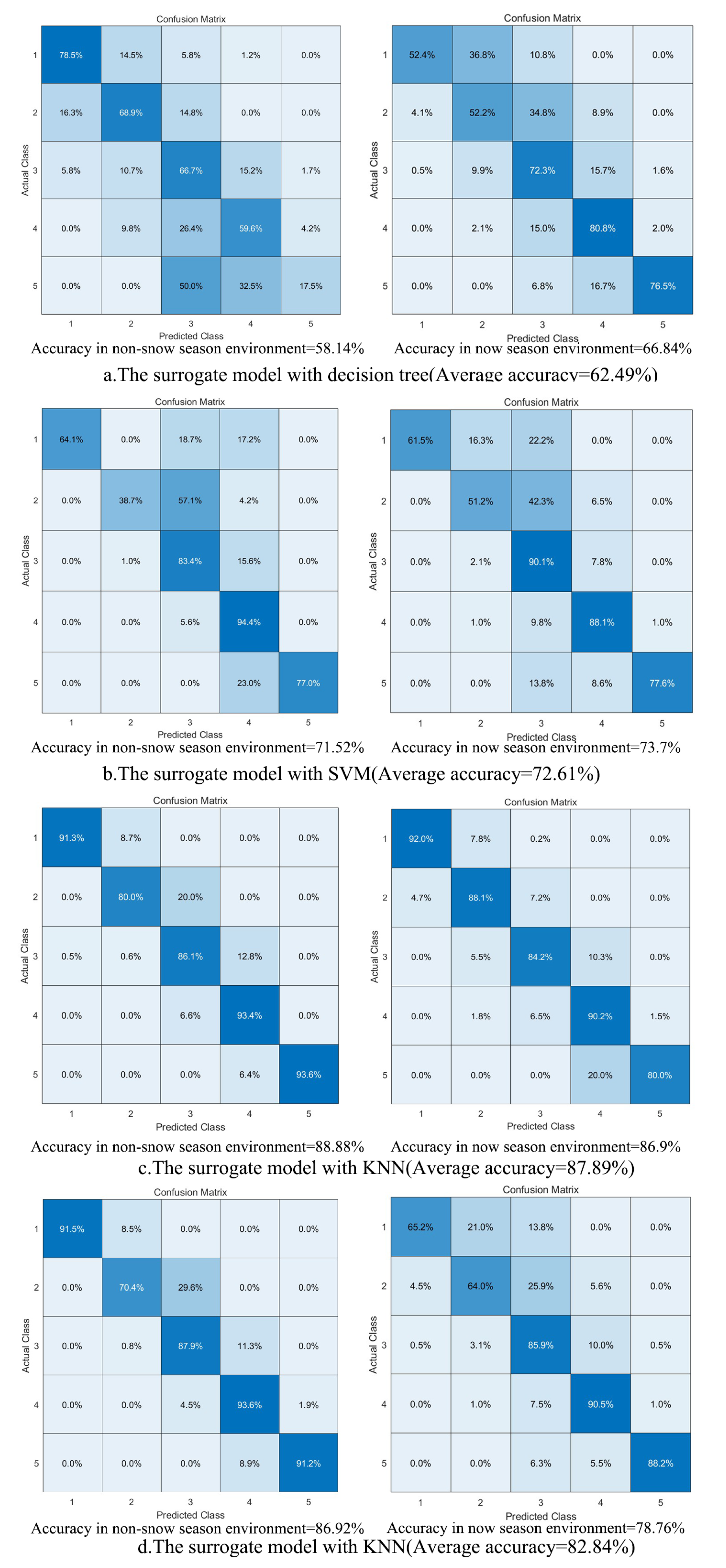
3.3.1. Machine Learning
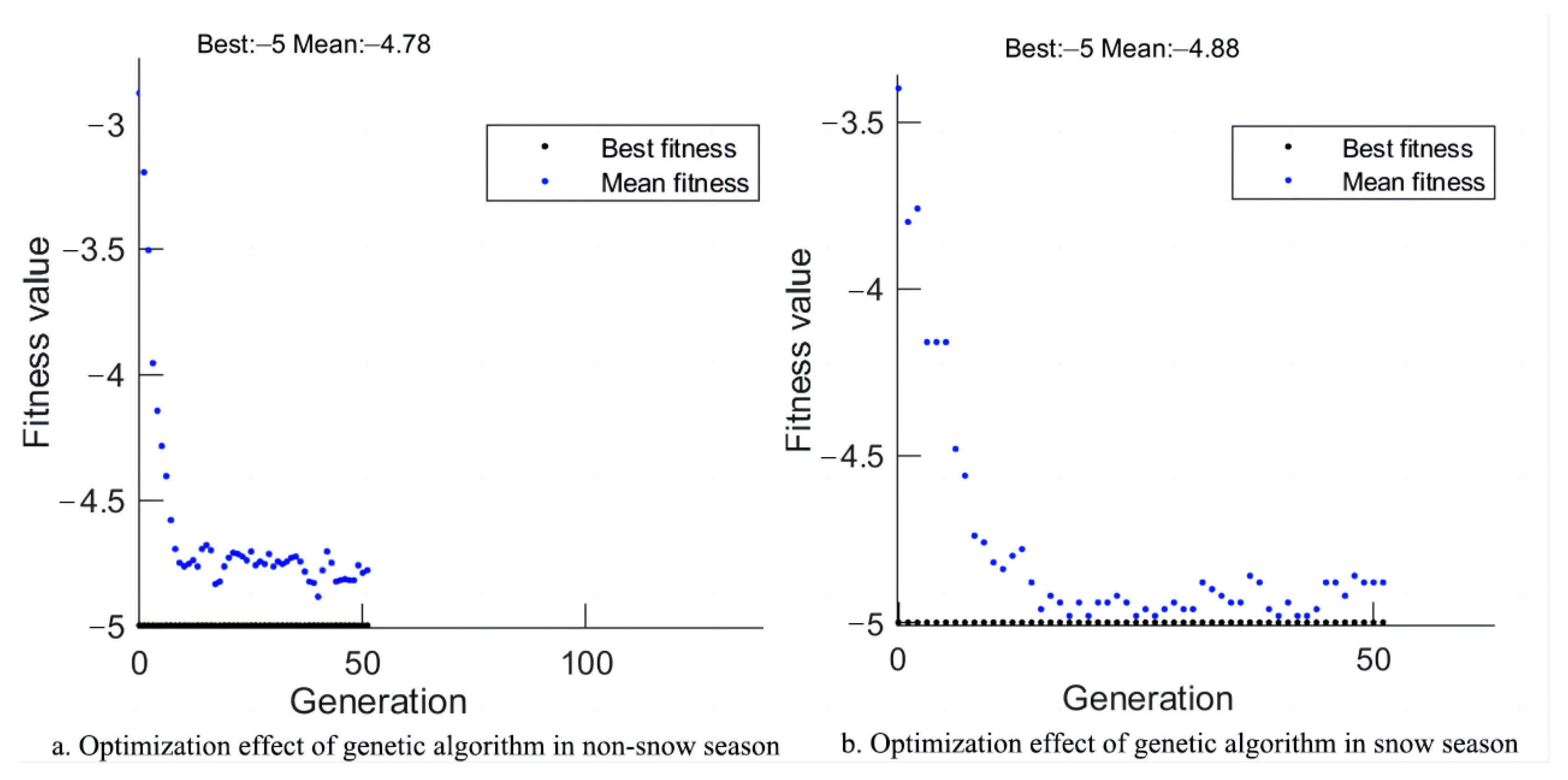
3.3.2. Optimizing the Threshold
4. Discussion
4.1. Walking with a VR Headset Is More Accurate Than Using a Joystick Remote Control to Obtain Visual Focus
4.2. Machine Learning Model Comparison
4.3. Limitation of Subject Group Selection and Leisure Type
4.4. Limitations of Screening Leisure Visual Landscape Environmental Factors
4.5. Limitations of Research Application and Evaluation Monitoring
5. Conclusions
5.1. Landscape Environment Factors
5.2. Environmental Factors and Landscape Visual Perception Scores
5.3. Optimized Variable Ranges
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Decision Tree
Appendix A.2. Support Vector Machines (SVMs)
Appendix A.3. K-Nearest Neighbor (KNN)
Appendix A.4. Artificial Neural Network (ANN)
References
- Zhou, B.; Huang, M.; Li, C.-L.; Xu, B. Leisure Constraint and Mental Health: The Case of Park Users in Ningbo, China. J. Outdoor Recreat. Tour. 2022, 39, 100562. [Google Scholar] [CrossRef]
- Langlois, F.; Thien, T.M.V.; Chasse, K.; Dupuis, G.; Kergoat, M.-J.; Bherer, L. Benefits of Physical Exercise Training on Cognition and Quality of Life in Frail Older Adults. J. Gerontol. Ser. B-Psychol. Sci. Soc. Sci. 2013, 68, 400–404. [Google Scholar] [CrossRef]
- Brach, J.S.; Simonsick, E.M.; Kritchevsky, S.; Yaffe, K.; Newman, A.B. The Association between Physical Function and Lifestyle Activity and Exercise in the Health, Aging and Body Composition Study. J. Am. Geriatr. Soc. 2004, 52, 502–509. [Google Scholar] [CrossRef]
- Helbich, M. Toward Dynamic Urban Environmental Exposure Assessments in Mental Health Research. Environ. Res. 2018, 161, 129–135. [Google Scholar] [CrossRef]
- Chen, C.; Luo, W.; Kang, N.; Li, H.; Yang, X.; Xia, Y. Study on the Impact of Residential Outdoor Environments on Mood in the Elderly in Guangzhou, China. Sustainability 2020, 12, 3933. [Google Scholar] [CrossRef]
- Helbich, M.; Yao, Y.; Liu, Y.; Zhang, J.; Liu, P.; Wang, R. Using Deep Learning to Examine Street View Green and Blue Spaces and Their Associations with Geriatric Depression in Beijing, China. Environ. Int. 2019, 126, 107–117. [Google Scholar] [CrossRef]
- Wang, R.; Liu, Y.; Lu, Y.; Zhang, J.; Liu, P.; Yao, Y.; Grekousis, G. Perceptions of Built Environment and Health Outcomes for Older Chinese in Beijing: A Big Data Approach with Street View Images and Deep Learning Technique. Comput. Environ. Urban Syst. 2019, 78, 101386. [Google Scholar] [CrossRef]
- Kaplan, S. The Restorative Benefits of Nature: Toward an Integrative Framework. J. Environ. Psychol. 1995, 15, 169–182. [Google Scholar] [CrossRef]
- Lindal, P.J.; Hartig, T. Architectural Variation, Building Height, and the Restorative Quality of Urban Residential Streetscapes. J. Environ. Psychol. 2013, 33, 26–36. [Google Scholar] [CrossRef]
- Yang, J.; Meng, Q.; Murroni, M.; Wang, S.; Shao, F. IEEE Access Special Section Editorial: Biologically Inspired Image Processing Challenges and Future Directions. IEEE Access 2020, 8, 147459–147462. [Google Scholar] [CrossRef]
- Wen, F.; Huang, M.J.; Yi, W. Effect of the preference of visual elements on the intention of reuse when designing a healing environment of welfare facilities for senior citizens: Focusing on welfare facilities for senior citizens in Seoul. J. Basic Des. Art 2021, 22, 337–348. [Google Scholar] [CrossRef]
- Tabrizian, P.; Baran, P.K.; Smith, W.R.; Meentemeyer, R.K. Exploring Perceived Restoration Potential of Urban Green Enclosure through Immersive Virtual Environments. J. Environ. Psychol. 2018, 55, 99–109. [Google Scholar] [CrossRef]
- Polat, A.T.; Akay, A. Relationships between the Visual Preferences of Urban Recreation Area Users and Various Landscape Design Elements. Urban For. Urban Green. 2015, 14, 573–582. [Google Scholar] [CrossRef]
- Pan, W.; Du, J. Effects of Neighbourhood Morphological Characteristics on Outdoor Daylight and Insights for Sustainable Urban Design. J. Asian Archit. Build. Eng. 2022, 21, 342–367. [Google Scholar] [CrossRef]
- Yadav, M.; Chaspari, T.; Kim, J.; Ahn, C.R. Capturing and Quantifying Emotional Distress in the Built Environment. In Proceedings of the Workshop on Human-Habitat for Health (H3): Human-Habitat Multimodal Interaction for Promoting Health and Well-Being in the Internet of Things Era, Boulder, CO, USA, 16–20 October 2018; ACM: New York, NY, USA; pp. 1–8. [Google Scholar]
- Pei, W.; Guo, X.; Lo, T. Pre-Evaluation Method of the Experiential Architecture Based on Multidimensional Physiological Perception. J. Asian Archit. Build. Eng. 2023, 22, 1170–1194. [Google Scholar] [CrossRef]
- Leisman, G.; Moustafa, A.A.; Shafir, T. Thinking, Walking, Talking: Integratory Motor and Cognitive Brain Function. Front. Public Health 2016, 4, 94. [Google Scholar] [CrossRef]
- Cortesão, J.; Brandão Alves, F.; Raaphorst, K. Photographic Comparison: A Method for Qualitative Outdoor Thermal Perception Surveys. Int. J. Biometeorol. 2020, 64, 173–185. [Google Scholar] [CrossRef] [PubMed]
- Mauss, I.B.; Robinson, M.D. Measures of Emotion: A Review. Cogn. Emot. 2009, 23, 209–237. [Google Scholar] [CrossRef] [PubMed]
- Annemans, M.; Audenhove, C.V.; Vermolen, H.; Heylighen, A. How to Introduce Experiential User Data: The Use of Information in Architects’ Design Process. In Proceedings of the Design’s Big Debates—DRS International Conference, Umeå, Sweden, 16–19 June 2014. [Google Scholar]
- Rogge, E.; Nevens, F.; Gulinck, H. Perception of Rural Landscapes in Flanders: Looking beyond Aesthetics. Landsc. Urban Plan. 2007, 82, 159–174. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhuo, K.; Wei, W.; Li, F.; Yin, J.; Xu, L. Emotional Responses to the Visual Patterns of Urban Streets: Evidence from Physiological and Subjective Indicators. Int. J. Environ. Res. Public Health 2021, 18, 9677. [Google Scholar] [CrossRef] [PubMed]
- Abraham, A.; Sommerhalder, K.; Abel, T. Landscape and Well-Being: A Scoping Study on the Health-Promoting Impact of Outdoor Environments. Int. J. Public Health 2010, 55, 59–69. [Google Scholar] [CrossRef] [PubMed]
- Costall, A.P. Are Theories of Perception Necessary? A Review of Gibson’s The Ecological Approach to Visual Perception. J. Exp. Anal. Behav. 1984, 41, 109–115. [Google Scholar] [CrossRef] [PubMed]
- Cui, W.; Li, Z.; Xuan, X.; Li, Q.; Shi, L.; Sun, X.; Zhu, K.; Shi, Y. Influence of Hospital Outdoor Rest Space on the Eye Movement Measures and Self-Rating Restoration of Staff. Front. Public Health 2022, 10, 855857. [Google Scholar] [CrossRef]
- Lisinska-Kusnierz, M.; Krupa, M. Suitability of Eye Tracking in Assessing the Visual Perception of Architecture-A Case Study Concerning Selected Projects Located in Cologne. Buildings 2020, 10, 20. [Google Scholar] [CrossRef]
- Birenboim, A.; Dijst, M.; Ettema, D.; de Kruijf, J.; de Leeuw, G.; Dogterom, N. The Utilization of Immersive Virtual Environments for the Investigation of Environmental Preferences. Landsc. Urban Plan. 2019, 189, 129–138. [Google Scholar] [CrossRef]
- Johnson, A.; Thompson, E.M.; Coventry, K.R. Human Perception, Virtual Reality and the Built Environment. In Proceedings of the 2010 14th International Conference Information Visualisation, London, UK, 26–29 July 2010; pp. 604–609. [Google Scholar]
- Luo, S.; Shi, J.; Lu, T.; Furuya, K. Sit down and Rest: Use of Virtual Reality to Evaluate Preferences and Mental Restoration in Urban Park Pavilions. Landsc. Urban Plan. 2022, 220, 104336. [Google Scholar] [CrossRef]
- Deng, Z.; Zhu, X.; Cheng, D.; Zong, M.; Zhang, S. Efficient KNN Classification Algorithm for Big Data. Neurocomputing 2016, 195, 143–148. [Google Scholar] [CrossRef]
- Zhang, D.; Li, D.; Zhou, L.; Wu, J. Fine Classification of UAV Urban Nighttime Light Images Based on Object-Oriented Approach. Sensors 2023, 23, 2180. [Google Scholar] [CrossRef]
- Hong, G.; Choi, G.-S.; Eum, J.-Y.; Lee, H.S.; Kim, D.D. The Hourly Energy Consumption Prediction by KNN for Buildings in Community Buildings. Buildings 2022, 12, 1636. [Google Scholar] [CrossRef]
- Xiong, L.; Yao, Y. Study on an Adaptive Thermal Comfort Model with K-Nearest-Neighbors (KNN) Algorithm. Build. Environ. 2021, 202, 108026. [Google Scholar] [CrossRef]
- Tsalera, E.; Papadakis, A.; Samarakou, M. Monitoring, Profiling and Classification of Urban Environmental Noise Using Sound Characteristics and the KNN Algorithm. Energy Rep. 2020, 6, 223–230. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, G. Optimization of the Virtual Scene Layout Based on the Optimal 3D Viewpoint. IEEE Access 2022, 10, 110426–110443. [Google Scholar] [CrossRef]
- Awada, M.; Srour, I. A Genetic Algorithm Based Framework to Model the Relationship between Building Renovation Decisions and Occupants’ Satisfaction with Indoor Environmental Quality. Build. Environ. 2018, 146, 247–257. [Google Scholar] [CrossRef]
- Estacio, I.; Hadfi, R.; Blanco, A.; Ito, T.; Babaan, J. Optimization of Tree Positioning to Maximize Walking in Urban Outdoor Spaces: A Modeling and Simulation Framework. Sust. Cities Soc. 2022, 86, 104105. [Google Scholar] [CrossRef]
- Sundet, J.M. Effects of Colour on Perceived Depth: Review of Experiments and Evalutaion of Theories. Scand. J. Psychol. 1978, 19, 133–143. [Google Scholar] [CrossRef] [PubMed]
- Niehorster, D.C.; Hessels, R.S.; Benjamins, J.S. GlassesViewer: Open-Source Software for Viewing and Analyzing Data from the Tobii Pro Glasses 2 Eye Tracker. Behav. Res. 2020, 52, 1244–1253. [Google Scholar] [CrossRef] [PubMed]
- Dunn, M.J.; Alexander, R.G.; Amiebenomo, O.M.; Arblaster, G.; Atan, D.; Erichsen, J.T.; Ettinger, U.; Giardini, M.E.; Gilchrist, I.D.; Hamilton, R.; et al. Minimal Reporting Guideline for Research Involving Eye Tracking (2023 Edition). Behav. Res. 2023. [Google Scholar] [CrossRef] [PubMed]
- Shadiev, R.; Li, D. A Review Study on Eye-Tracking Technology Usage in Immersive Virtual Reality Learning Environments. Comput. Educ. 2023, 196, 104681. [Google Scholar] [CrossRef]
- Niehorster, D.C.; Santini, T.; Hessels, R.S.; Hooge, I.T.C.; Kasneci, E.; Nyström, M. The Impact of Slippage on the Data Quality of Head-Worn Eye Trackers. Behav. Res. 2020, 52, 1140–1160. [Google Scholar] [CrossRef]
- Zhang, R. Integrating Ergonomics Data and Emotional Scale to Analyze People’s Emotional Attachment to Different Landscape Features in the Wudaokou Urban Park. Front. Archit. Res. 2023, 12, 175–187. [Google Scholar] [CrossRef]
- Ashihara, Y. Exterior Design in Architecture; Van Nostrand Reinhold: New York, NY, USA, 1981. [Google Scholar]
- Lu, M.; Song, D.; Shi, D.; Liu, J.; Wang, L. Effect of High-Rise Residential Building Layout on the Spatial Vertical Wind Environment in Harbin, China. Buildings 2022, 12, 705. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Li, W.; Ricard, R.; Meng, Q.; Zhang, W. Assessing Street-Level Urban Greenery Using Google Street View and a Modified Green View Index. Urban For. Urban Green. 2015, 14, 675–685. [Google Scholar] [CrossRef]
- Jiang, B.; Chang, C.-Y.; Sullivan, W.C. A Dose of Nature: Tree Cover, Stress Reduction, and Gender Differences. Landsc. Urban Plan. 2014, 132, 26–36. [Google Scholar] [CrossRef]
- Zhang, X.; Constable, M.; Chan, K.L.; Yu, J.; Junyan, W. Defining Hue Contrast. In Computational Approaches in the Transfer of Aesthetic Values from Paintings to Photographs: Beyond Red, Green and Blue; Zhang, X., Constable, M., Chan, K.L., Yu, J., Junyan, W., Eds.; Springer: Singapore, 2018; pp. 179–189. ISBN 978-981-10-3561-6. [Google Scholar]
- Wang, W.; Cai, D.; Wang, L.; Huang, Q.; Xu, X.; Li, X. Synthesized Computational Aesthetic Evaluation of Photos. Neurocomputing 2016, 172, 244–252. [Google Scholar] [CrossRef]
- Li, Y.; Yabuki, N.; Fukuda, T. Measuring Visual Walkability Perception Using Panoramic Street View Images, Virtual Reality, and Deep Learning. Sustain. Cities Soc. 2022, 86, 104140. [Google Scholar] [CrossRef]
- Jing, W.; Yin, Y.; Luo, W.; Zhang, J.; Qin, Z.; Liu, X.; Zhen, M. Outdoor Clothing Choice for Different Populations in Cold Regions: A Clothing Choice Prediction Model Based on Machine Learning. Energy Build. 2023, 289, 113069. [Google Scholar] [CrossRef]
- Jeon, J.Y.; Hong, J.Y. Classification of Urban Park Soundscapes through Perceptions of the Acoustical Environments. Landsc. Urban Plan. 2015, 141, 100–111. [Google Scholar] [CrossRef]
- Kong, M.; Kim, H.; Hong, T. An Effect of Numerical Data through Monitoring Device on Perception of Indoor Air Quality. Build. Environ. 2022, 216, 109044. [Google Scholar] [CrossRef]
- Berman, M.G.; Hout, M.C.; Kardan, O.; Hunter, M.R.; Yourganov, G.; Henderson, J.M.; Hanayik, T.; Karimi, H.; Jonides, J. The Perception of Naturalness Correlates with Low-Level Visual Features of Environmental Scenes. PLoS ONE 2014, 9, e114572. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A Review on Genetic Algorithm: Past, Present, and Future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Ting, C.K. On the Mean Convergence Time of Multi-Parent Genetic Algorithms without Selection. In European Conference on Artificial Life; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar] [CrossRef]
- Wei, Y.; Zhang, X.; Shi, Y.; Xia, L.; Pan, S.; Wu, J.; Han, M.; Zhao, X. A Review of Data-Driven Approaches for Prediction and Classification of Building Energy Consumption. Renew. Sustain. Energy Rev. 2018, 82, 1027–1047. [Google Scholar] [CrossRef]
- Asadi, E.; Silva, M.G.D.; Antunes, C.H.; Dias, L.; Glicksman, L. Multi-Objective Optimization for Building Retrofit: A Model Using Genetic Algorithm and Artificial Neural Network and an Application. Energy Build. 2014, 81, 444–456. [Google Scholar] [CrossRef]
- Yamada, Y.; Toritsuka, Y.; Nakamura, N.; Horibe, S.; Sugamoto, K.; Yoshikawa, H.; Shino, K. Correlation of 3D Shift and 3D Tilt of the Patella in Patients With Recurrent Dislocation of the Patella and Healthy Volunteers: An In Vivo Analysis Based on 3-Dimensional Computer Models. Am. J. Sports Med. 2017, 45, 3111–3118. [Google Scholar] [CrossRef]
- Han, J.; Lee, S. Verification of Immersive Virtual Reality as a Streetscape Evaluation Method in Urban Residential Areas. Land 2023, 12, 345. [Google Scholar] [CrossRef]
- Qi, Y.; Chodron Drolma, S.; Zhang, X.; Liang, J.; Jiang, H.; Xu, J.; Ni, T. An Investigation of the Visual Features of Urban Street Vitality Using a Convolutional Neural Network. Geo-Spat. Inf. Sci. 2020, 23, 341–351. [Google Scholar] [CrossRef]
- Harte, J.L.; Eifert, G.H. The Effects of Running, Environment, and Attentional Focus on Athletes’ Catecholamine and Cortisol Levels and Mood. Psychophysiology 1995, 32, 49–54. [Google Scholar] [CrossRef] [PubMed]
- Shi, L.; Zhang, Y.; Wang, Z.; Cheng, X.; Yan, H. Luminance Parameter Thresholds for User Visual Comfort under Daylight Conditions from Subjective Responses and Physiological Measurements in a Gymnasium. Build. Environ. 2021, 205, 108187. [Google Scholar] [CrossRef]
- Shi, L.; Qiu, J.; Zhang, R.; Li, Y.; Yang, Z.; Qi, X.; Tao, L.; Li, S.; Liu, W. An Intelligent Optimization Method of Exercisers’ Visual Comfort Assessment in Gymnasium. J. Build. Eng. 2023, 76, 107135. [Google Scholar] [CrossRef]
- Chinazzo, G.; Wienold, J.; Andersen, M. Influence of Indoor Temperature and Daylight Illuminance on Visual Perception. Light. Res. Technol. 2020, 52, 350–370. [Google Scholar] [CrossRef]
- Du, M.; Hong, B.; Gu, C.; Li, Y.; Wang, Y. Multiple Effects of Visual-Acoustic-Thermal Perceptions on the Overall Comfort of Elderly Adults in Residential Outdoor Environments. Energy Build. 2023, 283, 112813. [Google Scholar] [CrossRef]
- Ge, M.; Huang, Y.; Zhu, Y.; Kim, M.; Cui, X. Examining the Microclimate Pattern and Related Spatial Perception of the Urban Stormwater Management Landscape: The Case of Rain Gardens. Atmosphere 2023, 14, 1138. [Google Scholar] [CrossRef]
- Johansson, M.; Pedersen, E.; Maleetipwan-Mattsson, P.; Kuhn, L.; Laike, T. Perceived Outdoor Lighting Quality (POLQ): A Lighting Assessment Tool. J. Environ. Psychol. 2014, 39, 14–21. [Google Scholar] [CrossRef]
- Lyu, K.; Brambilla, A.; Globa, A.; de Dear, R. An Immersive Multisensory Virtual Reality Approach to the Study of Human-Built Environment Interactions. Autom. Constr. 2023, 150, 104836. [Google Scholar] [CrossRef]
- Eloy, S.; Andrade, M.; Dias, L.; Dias, M.S. The Impact of Sound in People’s Behaviour in Outdoor Settings: A Study Using Virtual Reality and Eye-Tracking. Appl. Ergon. 2023, 108, 103957. [Google Scholar] [CrossRef] [PubMed]
- Ayoub, M. A Review on Machine Learning Algorithms to Predict Daylighting inside Buildings. Sol. Energy 2020, 202, 249–275. [Google Scholar] [CrossRef]
- Rokach, L. Decision Forest: Twenty Years of Research. Inf. Fusion 2016, 27, 111–125. [Google Scholar] [CrossRef]
- Ding, S.; Zhu, Z.; Zhang, X. An Overview on Semi-Supervised Support Vector Machine. Neural Comput. Applic 2017, 28, 969–978. [Google Scholar] [CrossRef]
- Srivani, B.; Sandhya, N.; Padmaja Rani, B. Literature Review and Analysis on Big Data Stream Classification Techniques. KES 2020, 24, 205–215. [Google Scholar] [CrossRef]
- Huang, Y.; Ye, B.; Liu, T. Research on an Aging-Friendly Design of Urban Park Landscape Based on Computer Virtual Simulation Technology. Wirel. Commun. Mob. Comput. 2022, 2022, 7983757. [Google Scholar] [CrossRef]
- Santos, I.; Castro, L.; Rodriguez-Fernandez, N.; Torrente-Patiño, Á.; Carballal, A. Artificial Neural Networks and Deep Learning in the Visual Arts: A Review. Neural Comput. Applic 2021, 33, 121–157. [Google Scholar] [CrossRef]
- Ma, G.; Pan, X. Research on a Visual Comfort Model Based on Individual Preference in China through Machine Learning Algorithm. Sustainability 2021, 13, 7602. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | A | B | C | D |
|---|---|---|---|---|
| Construction time | 1990 | 2000 | 2013 | 2016 |
| Floor area ratio | 2.5 | 2.1 | 2.1 | 2.5 |
| Green space ratio | 24% | 20% | 30% | 30% |
| Live photos (non-snow season) |  |  |  |  |
| Live photos (snow season) |  |  |  |  |
| Number | Factors | Adjective Pairs |
|---|---|---|
| 1 | Space aspect ratio | Narrow–wide |
| 2 | Roof height difference | Low–high |
| 3 | Openness of sky | Small–big |
| 4 | Distance from leisure landscape space to building | Near–far |
| 5 | Building orientation angle | Low–high |
| 6 | The proportion of grass in the field of view | Low–high |
| 7 | The height of tall trees | Low–high |
| 8 | Color of buildings—H | Cold–warm |
| 9 | Color of buildings—S | Low–high |
| 10 | Color of buildings—V | Darkness–brightness |
| 11 | Color of ground—H | Cold–warm |
| 12 | Color of ground—S | Low–high |
| 13 | Color of ground—V | Darkness–brightness |
| 14 | Color quantity | Little–much |
| 15 | Hue contrast in visual field | Small–large |
 | ||
| Environmental Factors | Orthogonal Experimental Parameters in the Non-Snow Season |
| Space aspect ratio (SAR) | 1.2, 1.5, 1.8, 2.1, 2.4, 2.7, and 3 |
| Roof height difference (RHD) | 0 m, 12 m, 24 m, 36 m, 48 m, 60 m, and 72 m |
| Color saturation of buildings (BS) | 0, 20, 40, 60, 80, and 100 |
| Tall-tree height (TTH) | 6 m, 10 m, 14 m, 18 m, 22 m, 26 m, and 30 m |
| The proportion of grass in the field of view (GP) | 0, 3%, 6%, 9%, 12%, and 16% |
| Hue contrast in the visual field (HC) | 0, 30°, 60°, 90°, 120°, 150°, and 180° |
| Environmental Factors | Orthogonal Experimental Parameters in the Snow Season |
|---|---|
| Space aspect ratio (SAR) | 1.2, 1.5, 1.8, 2.1, 2.4, 2.7, and 3 |
| Saturation of buildings (BS) | 0, 20, 40, 60, 80, and 100 |
| The proportion of grass in the field of view (GP) | 0, 3%, 6%, 9%, 12%, and 16% |
| Solution Set 1 | Solution Set 2 | Solution Set 3 | Solution Set 4 | … | Solution Set 30 | Range | |
|---|---|---|---|---|---|---|---|
| SAR | 1.8795 | 1.9057 | 1.821 | 1.9776 | … | 2.1485 | 1.82–2.15 |
| RHD (m) | 15.094 | 10.8099 | 15.9183 | 18.1143 | … | 20.093 | 10.81–20.09 |
| BS | 58.2669 | 60.2785 | 48.5304 | 52.8396 | … | 61.0109 | 48.53–61.01 |
| TTH (m) | 17.5717 | 16.7644 | 14.3164 | 17.3361 | … | 18.2912 | 14.18–18.29 |
| GP (%) | 0.125 | 0.1369 | 0.1185 | 0.146 | … | 0.154 | 0.12–0.15 |
| HC | 19.9477 | 18.6411 | 20.6017 | 25.8764 | … | 26.8322 | 18.64–26.83 |
| W (Predict) | 5 (4.90) | 5 (4.70) | 5 (4.85) | 5 (4.96) | … | 5 (4.84) | 5 (4.70–5.0) |
| Solution Set 1 | Solution Set 2 | Solution Set 3 | Solution Set 4 | … | Solution Set 30 | Range | |
|---|---|---|---|---|---|---|---|
| SAR | 2.2234 | 2.4057 | 2.5211 | 2.3716 | … | 2.5425 | 2.22–2.54 |
| BS | 68.5324 | 70.8215 | 78.5304 | 72.8396 | … | 82.3412 | 68.53–82.34 |
| GP (%) | 0.104 | 0.139 | 0.115 | 0.136 | … | 0.144 | 0.1–0.14 |
| W (Predict) | 5 (4.76) | 5 (4.80) | 5 (4.90) | 5 (4.67) | … | 5 (4.84) | 5 (4.67–4.90) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Huang, K.; Zhang, R.; Chen, Y.; Dong, Y. Visual Perception Optimization of Residential Landscape Spaces in Cold Regions Using Virtual Reality and Machine Learning. Land 2024, 13, 367. https://doi.org/10.3390/land13030367
Li X, Huang K, Zhang R, Chen Y, Dong Y. Visual Perception Optimization of Residential Landscape Spaces in Cold Regions Using Virtual Reality and Machine Learning. Land. 2024; 13(3):367. https://doi.org/10.3390/land13030367
Chicago/Turabian StyleLi, Xueshun, Kuntong Huang, Ruinan Zhang, Yang Chen, and Yu Dong. 2024. "Visual Perception Optimization of Residential Landscape Spaces in Cold Regions Using Virtual Reality and Machine Learning" Land 13, no. 3: 367. https://doi.org/10.3390/land13030367
APA StyleLi, X., Huang, K., Zhang, R., Chen, Y., & Dong, Y. (2024). Visual Perception Optimization of Residential Landscape Spaces in Cold Regions Using Virtual Reality and Machine Learning. Land, 13(3), 367. https://doi.org/10.3390/land13030367