Symmetry Reduction and Numerical Solution of Von K
a
´
a
´

{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Formulation of Invariance for a BVP of PDEs
3. The Symmetry and Symmetry Reduction of von Krmn sWirling Viscous Flow
3.1. First Symmetry Reduction
3.2. Second Symmetry Reduction
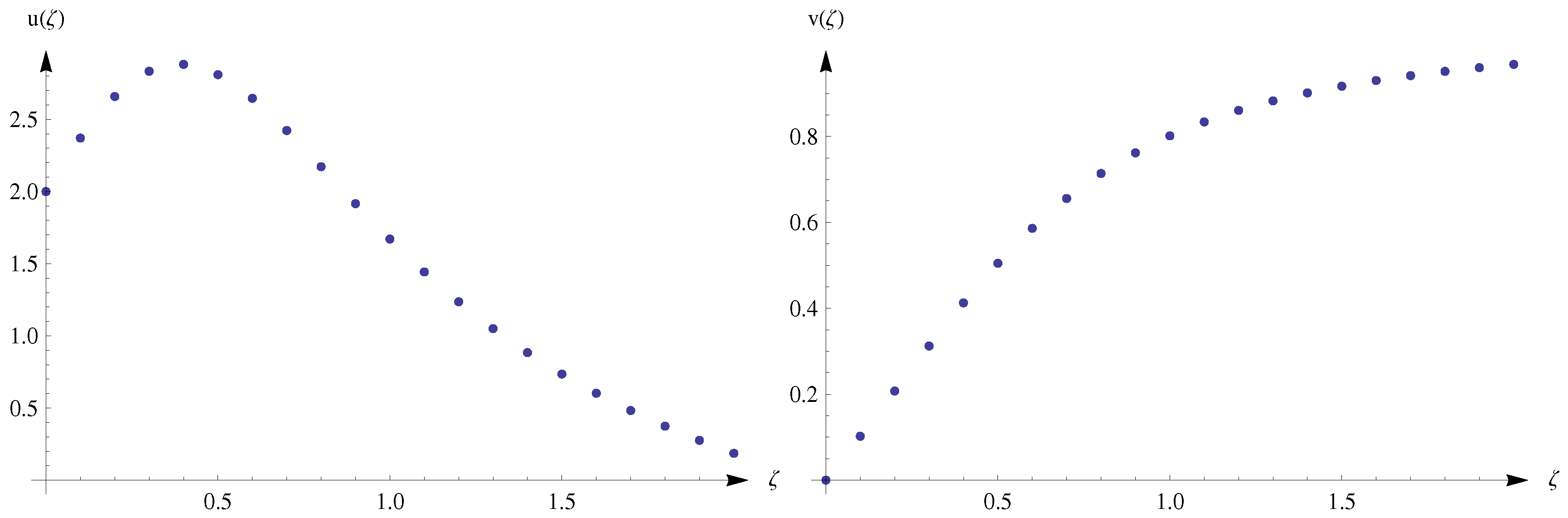
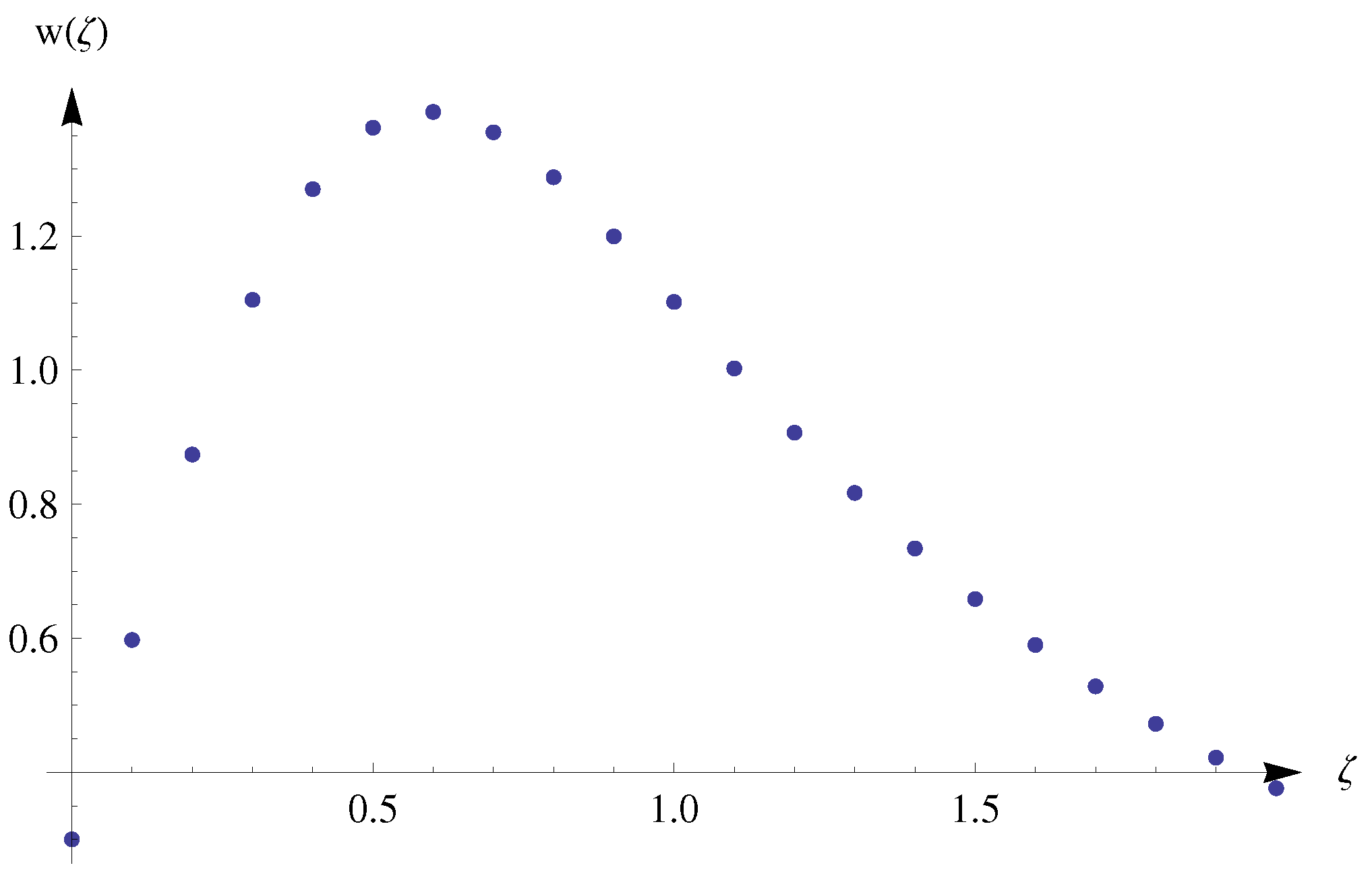
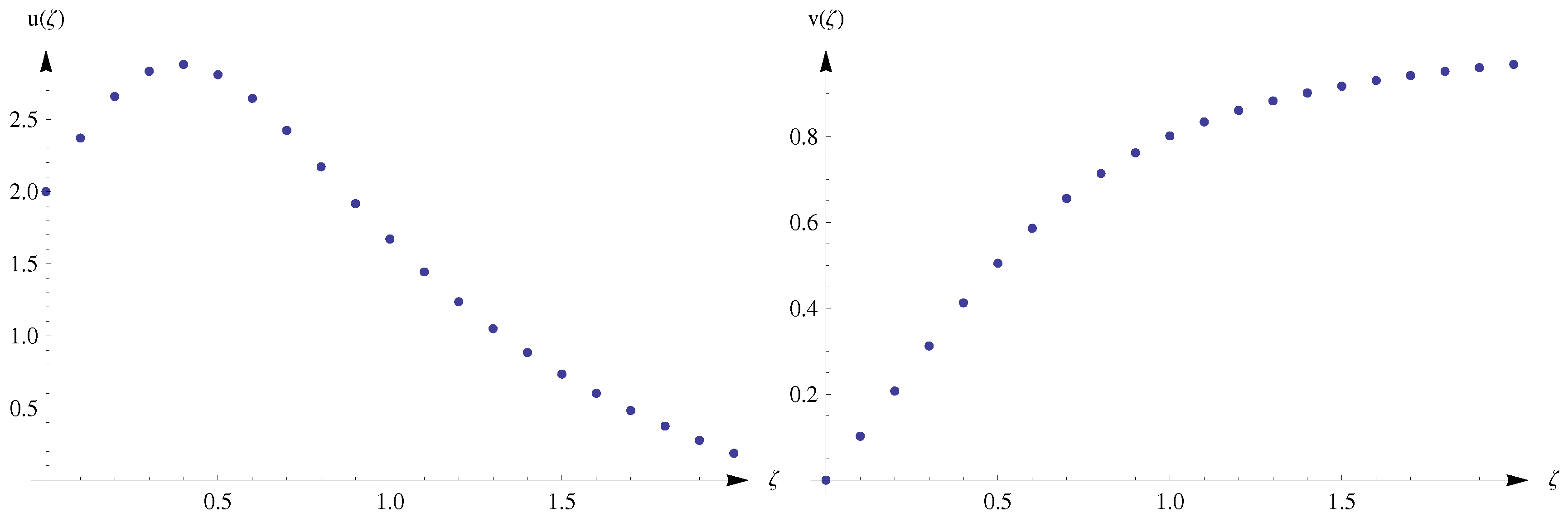
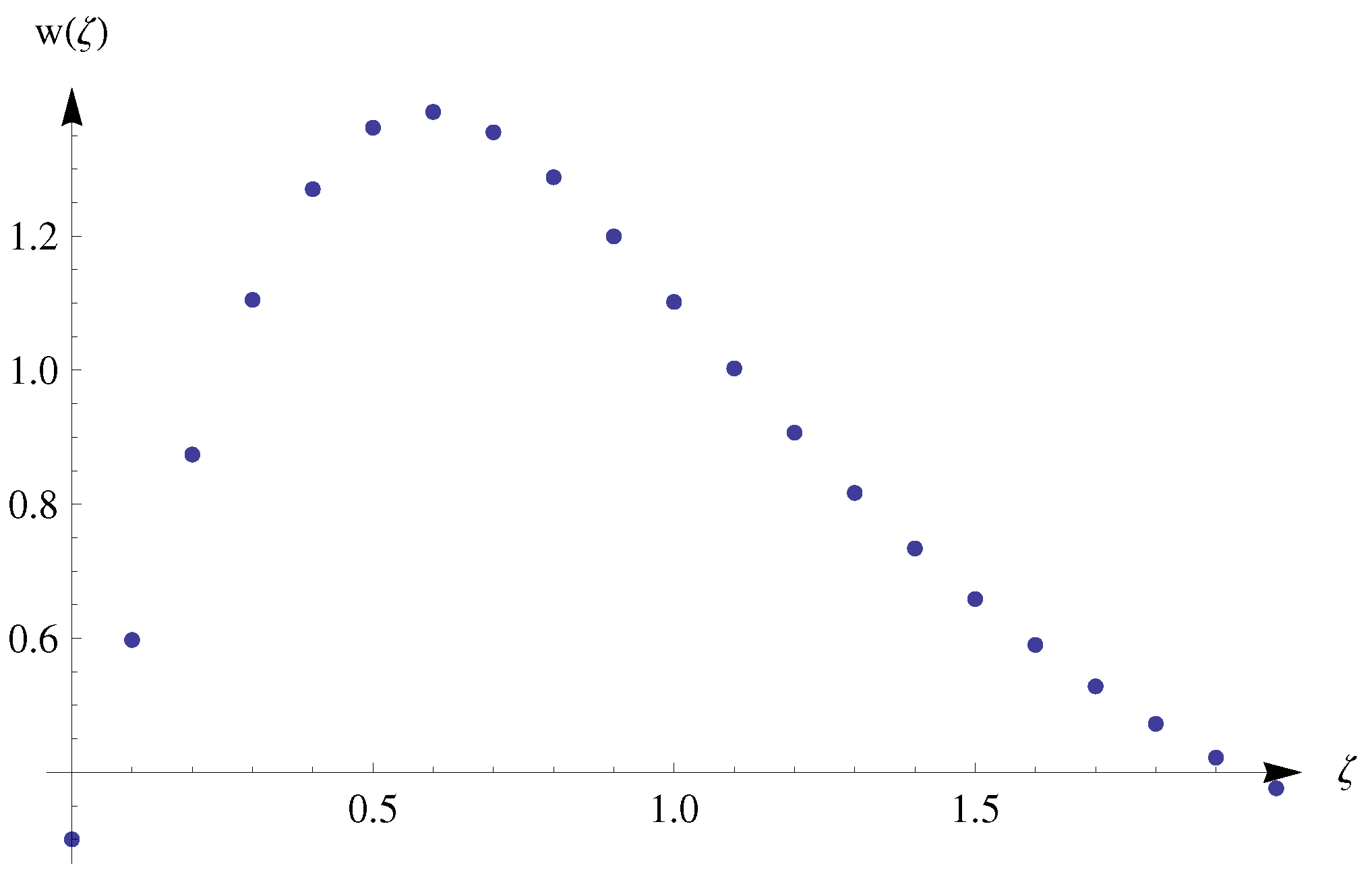
4. Numerical Solutions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lie, S. Vorlesungen uber Differentialgleichungen Mit Bekannten Infinitesimalen Transformationen; BG Teubner: Leipzig, Germany, 1891. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries and Differential Equations; Springer: New York, NY, USA; Berlin, Germany, 1989. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Spinger: New York, NY, USA; Berlin, Germany, 1986. [Google Scholar]
- Bluman, G.W.; Cheviakov, A.; Anco, S. Applications of Symmetry Methods to Partial Differential Equations; Springer: New York, NY, USA; Berlin, Germany, 2010. [Google Scholar]
- Ibragimov, N.H.; Ibragimov, R.N. Applications of Lie Group Analysis to Mathematical Modelling in Natural Sciences. Math. Model. Nat. Phenom. 2012, 7, 52–65. [Google Scholar] [CrossRef]
- Ibragimov, N.H. CRC Handbook of Lie Group Analysis of Differential Equations; CRC Press: Boca Raton, FL, USA, 1994; Volume 1. [Google Scholar]
- Ibragimov, N.H. CRC Handbook of Lie Group Analysis of Differential Equations; CRC Press: Boca Raton, FL, USA, 1995; Volume 2. [Google Scholar]
- Tiwari Ajey, K.; Pandey, S.N.; Senthilvelan, M.; Lakshmanan, M. Lie point symmetries classification of the mixed Lienard-type equation. Nonlinear Dyn. 2015, 82, 1953–1968. [Google Scholar] [CrossRef]
- Davison, A.H.; Kara, A.H. Potential Symmetries and Associated Conservation Laws with Application to Wave Equations. Nonlinear Dyn. 2003, 33, 369–377. [Google Scholar] [CrossRef]
- Chaolu, T.M.; Bai, Y.S. An Algorithm for Determining Approximate Symmetries of Differential Equations Based on Wu’s Method. Chin. J. Eng. Math. 2011, 28, 617–622. [Google Scholar]
- Ma, W.X. K-symmetries and τ-symmetries of evolution equations and their Lie algebras. J. Phys. A Math. Gen. 1990, 23, 2707–2716. [Google Scholar] [CrossRef]
- Ma, W.X. A soliton hierarchy associated with so(3,R). Appl. Math. Comput. 2013, 220, 117–122. [Google Scholar]
- Bluman, G.W.; Chaolu, T.M. Conservation laws of nonlinear telegraph equations. J. Math. Anal. Appl. 2005, 310, 459–476. [Google Scholar] [CrossRef]
- Anco, S.; Bluman, G.W.; Wolf, T. Invertible mappings of nonlinear PDEs to linear PDEs through admitted conservation laws. Acta Appl. Math. 2008, 101, 21–38. [Google Scholar] [CrossRef]
- Abdulwahhab, M.A. Exact solutions and conservation laws of the system of two-dimensional viscous Burgers equations. Commun. Nonlinear Sci. Numer. Simul. 2016, 39, 283–299. [Google Scholar] [CrossRef]
- Avdonina, E.D.; Ibragimov, N.H.; Khamitova, R. Exact solutions of gasdynamic equations obtained by the method of conservation laws. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 2359–2366. [Google Scholar] [CrossRef]
- Ma, W.X. Conservation Laws of Discrete Evolution Equations by Symmetries and Adjoint Symmetries. Symmetry 2015, 7, 714–725. [Google Scholar] [CrossRef]
- Wang, G.W.; Liu, X.Q.; Zhang, Y.Y. Symmetry reduction, exact solutions and conservation laws of a new fifth-order nonlinear integrable equation. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 2313–2320. [Google Scholar] [CrossRef]
- Sahoo, S.; Saha Ray, S. Lie symmetry analysis and exact solutions of (3+1) dimensional Yu-Toda-Sasa- Fukuyama equation in mathematical physics. Comput. Math. Appl. 2017, 73, 253–260. [Google Scholar] [CrossRef]
- Ma, W.X.; Chen, M. Direct search for exact solutions to the nonlinear Schrödinger equation. Appl. Math. Comput. 2009, 215, 2835–2842. [Google Scholar]
- Yang, H.Z.; Liu, W.; Yang, B.Y.; He, B. Lie symmetry analysis and exact explicit solutions of three-dimensional Kudryashov-Sinelshchikov equation. Commun. Nonlinear Sci. Numer. Simul. 2015, 27, 271–280. [Google Scholar] [CrossRef]
- Yang, S.J.; Hua, C.C. Lie symmetry reductions and exact solutions of a coupled KdV-Burgers equation. Appl. Math. Comput. 2014, 234, 579–583. [Google Scholar] [CrossRef]
- Seshadri, R.; Na, T.Y. Group Invariance in Engineering Boundary Value Problems; Springer: New York, NY, USA; Berlin/Heidelberg, Germany; Tokyo, Japan, 1985. [Google Scholar]
- Yürüsoy, M.; Pakdemirli, M.; Noyan, Ö.F. Lie group analysis of creeping flow of a second grade fluid. Int. J. Non-Linear Mech. 2001, 36, 955–960. [Google Scholar]
- Vaneeva, O.O.; Papanicolaou, N.C.; Christou, M.A.; Sophocleous, C. Numerical solutions of boundary value problems for variable coefficient generalized KdV equations using Lie symmetries. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3074–3085. [Google Scholar] [CrossRef]
- Bilige, S.D.; Wang, X.M.; Morigen, W.Y. Application of the symmetry classification to the boundary value problem of nonlinear partial differential equations (in Chinese). Acta Phys. Sin. 2014, 63, 040201. [Google Scholar]
- Gai, L.T.; Bilige, S.D.; Jie, Y.M. The exact solutions and approximate analytic solutions of (2+1)-dimensional KP equation based on symmetry method. SpringerPlus 2016, 5, 1267. [Google Scholar] [CrossRef] [PubMed]
- Bilige, S.D.; Han, Y.Q. Symmetry reduction and numerical solution of a nonlinear boundary value problem in fluid mechanics. Int. J. Numer. Methods Heat Fluid Flow 2018, 28, 518–531. [Google Scholar] [CrossRef]
- Chaolu, T.M.; Bai, Y.S. A new algorithmic theory for determining and classifying classical and non-classical symmetries of partial differential equations (in Chinese). Sci. China Math. 2010, 40, 331–348. [Google Scholar]
- Yang, C.; Liao, S.J. On the explicit, purely analytic solution of Von Kármán swirling viscous flow. Commun. Nonlinear Sci. Numer. Simul. 2006, 11, 83–93. [Google Scholar] [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Bilige, S.
Symmetry Reduction and Numerical Solution of Von K
Wang X, Bilige S.
Symmetry Reduction and Numerical Solution of Von K
Wang, XiaoMin, and SuDao Bilige.
2018. "Symmetry Reduction and Numerical Solution of Von K