
Principal Stress Trajectories in Plasticity under Plane Strain and Axial Symmetry



1
Ishlinsky Institute for Problems in Mechanics RAS, 101-1 Prospect Vernadskogo, 119526 Moscow, Russia
2
School of Mechanical Engineering and Automation, Beihang University, No. 37 Xueyuan Road, Beijing 100191, China
3
Department of Civil Engineering, Peoples’ Friendship University of Russia (RUDN University), 6 Miklukho-Maklaya St., 117198 Moscow, Russia
*
Author to whom correspondence should be addressed.
Symmetry 2023, 15(5), 981; https://doi.org/10.3390/sym15050981
Submission received: 28 February 2023
/
Revised: 12 March 2023
/
Accepted: 23 April 2023
/
Published: 25 April 2023
(This article belongs to the Special Issue Symmetry: Recent Developments in Engineering Science and Applications)
{kind=link}
Abstract
:The two families of principal stress trajectories can be regarded as an orthogonal curvilinear coordinate system under plane strain and axial symmetry. Under plane strain, the equilibrium equations in conjunction with a yield criterion comprise a statically determinate system. Under axial symmetry, a statically determinate system results from the above equations supplemented with the hypothesis of Haar von Karman. In both cases, the compatibility equations for mapping the principal line coordinate system to a given coordinate system show that the scale factors of the former satisfy a simple algebraic or transcendental equation for many yield criteria. Using this equation, one can develop a method for reducing boundary value problems in plasticity to purely geometric problems. The method is independent of any flow rule that can be chosen to calculate displacement or velocity fields, as well as independent whether elastic strains are included. The present paper summarizes available results related to using principal stress trajectories in plasticity and emphasizes the advantages of the method above.
1. Introduction
In the case of plane strain and axisymmetric deformations, principal stress trajectories can be regarded as the coordinate curves of an orthogonal coordinate system. This coordinate system is named the principal line coordinate system. Typical constitutive equations of plasticity include a yield criterion. In the case of isotropic perfectly plastic solids, the yield criterion is an equation that involves stress invariants and constitutive parameters. Depending on the yield criterion, the principal line coordinate system has remarkable geometric properties in regions where the yield criterion is satisfied. The pioneering work that discovered such properties was published in 1941 [1]. This paper has considered the plane strain deformation of solids obeying Tresca’s yield criterion. The derivation is also valid for an arbitrary pressure-independent yield criterion if the material is regarded as rigid plastic. The present paper reviews the extension of the result reported in [1] to more general yield criteria and axisymmetric deformation. The phrase ‘linear yield criterion’ means that the yield criterion is represented by a linear function of the principal stresses. The theory has been completed for such yield criteria. The research on more general yield criteria is ongoing. The first results are included in the present paper.
Besides geometric properties, various aspects of research related to principal stress trajectories have been reported in the literature. Paper [2] has developed a principal line theory of axisymmetric plastic deformation, assuming that a face regime of Tresca’s yield criterion is operative. It has been emphasized in [3] that using principal line coordinates proves advantageous for solving boundary value problems, including numerically. The practical usefulness of principal line coordinates has also been noted in [4].
The Ideal flow theory is a tool for designing metal-forming processes [5]. A property of stationary bulk ideal flows is that principal stress trajectories coincide with streamlines [6,7]. A property of non-stationary bulk ideal flows is that principal stress trajectories are material lines [8]. In both cases, calculating ideal flows is equivalent to calculating principal stress trajectories.
2. Basic Equations
2.1. Coordinate Systems
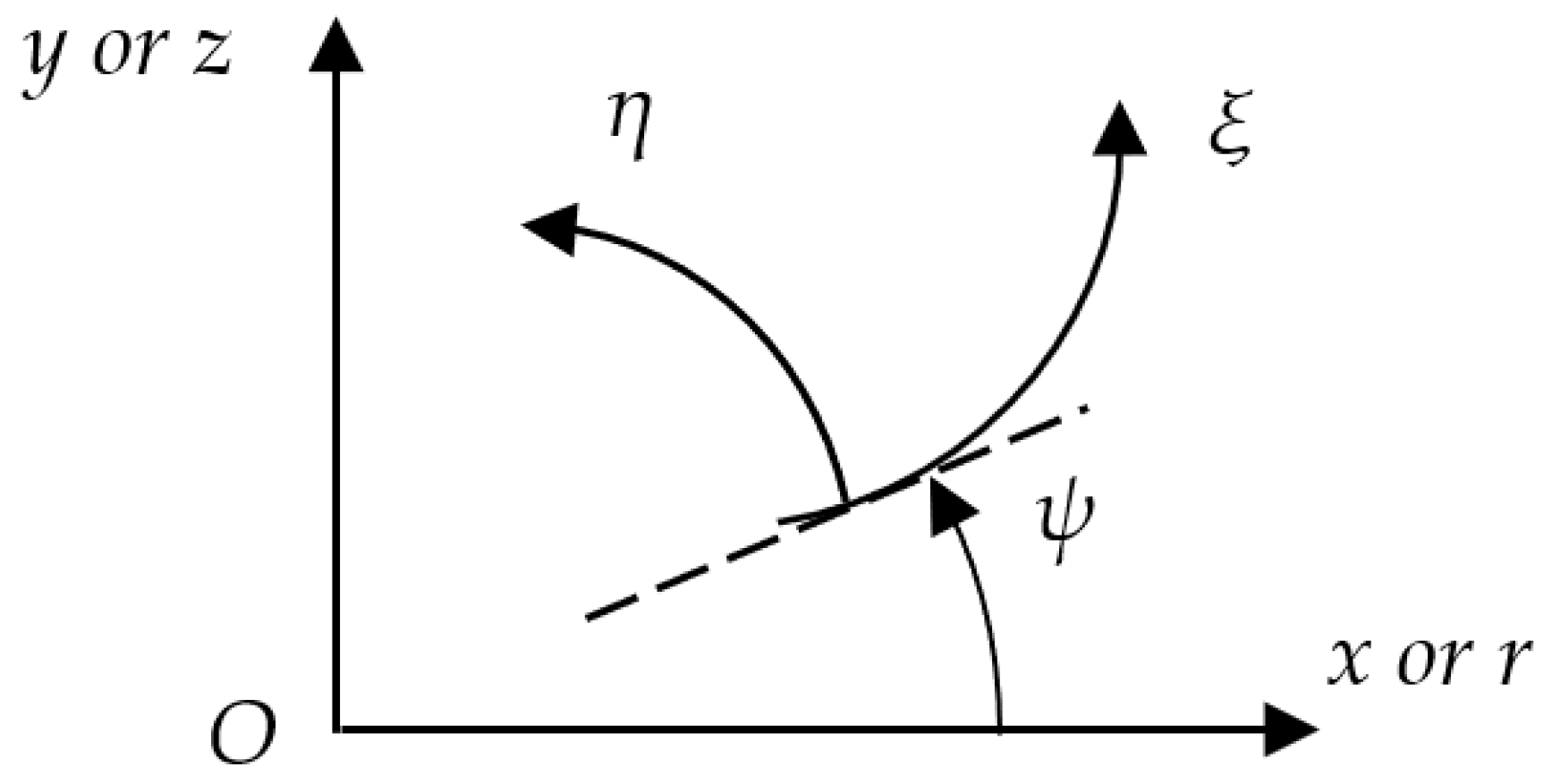
The principal stress directions are orthogonal. Therefore, two families of the principal stress trajectories can be regarded as a curvilinear orthogonal system in a generic flow plane under plane strain. This coordinate system is denoted as . Besides, a Cartesian coordinate system in the same plane will be used. This coordinate system is denoted as . These two coordinate systems are depicted in Figure 1, where is the orientation of the -lines relative to the x-axis, measured anticlockwise positive from the x-axis. The scale factors of the - and -coordinate lines are denoted as and , respectively. It is seen from Figure 1 that
The compatibility equations are
Equations (1) and (2) combine to give
Multiplying the first equation by , the second by and summing gives
Similarly, multiplying (3)1 by , (3)2 by and summing gives
Under axial symmetry, two families of the principal stress trajectories can be regarded as a curvilinear orthogonal system in a generic meridian plane. This coordinate system is denoted as . Besides, a cylindrical coordinate system will be used. In a generic meridian plane, these two coordinate systems are depicted in Figure 1, where is the orientation of the -lines relative to the r-axis, measured anticlockwise positive from the r-axis. The coordinate system is a principal line coordinate system. The scale factors of the - and -coordinate curves are denoted as and , respectively. The scale factor of the -coordinate lines is r. It is seen from Figure 1 that
The same line of reasoning that has led to Equations (4) and (5), starting from Equation (1), can be used to show that (4) and (5) are valid under axial symmetry.
2.2. Plasticity
The models considered herein are perfectly plastic and statically determinate. The latter means that the plastic flow rule and elastic deformation are immaterial for analyzing the stress equations. The system of equations consists of the equilibrium equations and a yield (or failure, or strength) criterion. The term yield will be used herein.
Let and be the normal stresses referred to the principal line coordinate system. These stresses are principal stresses. Under axial symmetry, the third principal stress is denoted as . The equilibrium equations are [9]
under plane strain and
under axial symmetry.
Any isotropic plane strain yield criterion can be represented as
Here, is an arbitrary function of its arguments satisfying the standard requirements of plasticity theory and is a reference stress. Equations (4), (5), (7), and (9) form a determinate system for , , , , and . Under axial symmetry, piece-wise differentiable yield criteria are considered. A typical yield criterion can be represented as
It is assumed that the equations in (10) can be rewritten as
and
The last equation expresses the hypothesis of Haar von Karman. Equations (4), (5), (8), (11), and (12) form a determinate system for , , , , , and .
In what follows, it is assumed without loss of generality that
3. Relations between hξ and hη under Plane Strain
3.1. Tresca Yield Criterion
Tresca’s yield criterion is often used in metal plasticity [10]. Considering (13), this yield criterion can be represented as
where k is the shear yield stress. Eliminating in (7) using (14), one gets
Each of these equations can be immediately integrated to give
Here, and are arbitrary functions of and , respectively. However, different choices of these functions merely change the scale of the coordinate curves. Therefore, without loss of generality, it is possible to choose and . Then, Equation (16) becomes
Substituting (17) into (14) yields
This relation between the scale factors has been derived in [1].
3.2. Mohr-Coulomb Yield Criterion
The Mohr–Coulomb yield criterion is widely used for describing the deformation of granular materials [11,12,13]. Considering (13), this yield criterion can be represented as
where
k is the cohesion, and ϕ is the angle of internal friction. Using (20), one can transform the equations in (7) to
Eliminating p in these equations employing (19) yields
Each of these equations can be immediately integrated to give
Here, and are arbitrary functions of and , respectively. However, different choices of these functions merely change the scale of the coordinate curves. Therefore, without loss of generality, it is possible to choose and . Then, Equation (23) becomes
Eliminating q between these equations results in
where . This equation reduces to (18) at ϕ = 0.
3.3. Generalized Linear Yield Criterion
Generalized linear yield criteria are often adopted in the literature [14,15,16,17,18,19]. Considering (13), a typical generalized linear yield criterion can be represented as
where is a constitutive parameter. This equation reduces to (14) at . Therefore, it is assumed in this section that . Eliminating in (7) using (26), one gets
Integrating these equations leads to
Here, and are arbitrary functions of and , respectively. However, different choices of these functions merely change the scale of the coordinate curves. Therefore, without loss of generality, it is possible to choose . Then, Equation (28) becomes
Eliminating between these equations results in
This relation between the scale factors was derived in [19]. Equation (30) reduces to (18) at .
3.4. General Yield Criterion
An adequate description of some materials requires non-linear yield criteria [19,20,21,22]. It is convenient to represent (9) as
where q and p are defined as in (20). Expressing the principal stresses in terms of p and q, eliminating q by employing (31), and substituting the resulting expressions in the equations in (7) leads to
Each of these equations can be immediately integrated to give
Here, and are arbitrary functions of and ,, respectively. However, different choices of these functions merely change the scale of the coordinate curves. Therefore, without loss of generality, it is possible to choose . Then, Equation (33) becomes
These equations supply the relation between and in parametric form with p being the parameter. This relation was derived in [23]. It has been shown in this work that (34) reduces to (18), (25), or (30) if the function f in (31) is chosen accordingly.
4. Relations between hξ and hη under Axial Symmetry
4.1. Tresca Yield Criterion
Considering (13), Equation (11) in the case of Tresca’s yield criterion becomes
Eliminating and in (8) using (12)1 and (14), one gets
Each of these equations can be immediately integrated to give
Here, and are arbitrary functions of and , respectively. However, different choices of these functions merely change the scale of the coordinate curves. Therefore, without loss of generality it is possible to choose and . Then, Equation (37) becomes
Substituting (38) into (35) yields
This relation between the scale factors was derived in [24]. Using the line of reasoning above, one can derive Equation (39) employing (12)2 instead of (12)1.
4.2. Mohr-Coulomb Yield Criterion
Considering (13), Equation (11) in the case of the Coulomb–Mohr yield criterion becomes
Using (12)1 and (20), one can transform Equation (8) to
Eliminating p in these equations employing (40) yields
Each of these equations can be immediately integrated to give
Here, and are arbitrary functions of and , respectively. However, different choices of these functions merely change the scale of the coordinate curves. Therefore, without loss of generality, it is possible to choose and . Then, Equation (43) becomes
Eliminating q between these equations results in
The definition of m is provided after Equation (25).
Employing (12)2 instead of (12)1 and using the line of reasoning above, one gets
4.3. Generalized Linear Yield Criterion
Considering (13), Equation (11) in the case of a typical generalized linear yield criterion becomes
As in Section 3.3, it is assumed in this section that . Eliminating and in (8) using (12)1 and (47), one gets
Integrating these equations leads to
Here, and are arbitrary functions of and , respectively. However, different choices of these functions merely change the scale of the coordinate curves. Therefore, without loss of generality, it is possible to choose . Then, Equation (49) becomes
Substituting (50) into (47) results in
Employing (12)2 instead of (12)1 and using the line of reasoning above, one gets
Equations (51) and (52) have been derived in [25].
5. Final Equation Systems under Plane Strain
5.1. Linear Yield Criteria
Equations (18), (25), and (30) can be represented as
where in Equation (18), in Equation (25), and in Equation (30). Equation (53) can be rewritten in the form
Then, Equations (4) and (5) become
Using a standard technique, one can find the characteristic curves as
It is seen from this equation that the characteristics are real if . The hyperbolic regimes are most important in perfectly plastic solids [26]. Therefore, it is assumed that in the reminder of the present paper. Note that this inequality is automatically satisfied in the case of Equations (18) and (25). In the case of Equation (30), the inequality is equivalent to .
The characteristic coordinates are denoted as . The upper sign in (56) corresponds to the -curves and the lower sign to the -curves. Using a standard technique, one can find the characteristic relations as
These equations can immediately be integrated to give
Here, is an arbitrary function only of and is an arbitrary function only of . The equations in (58) can be solved for and . As a result,
If both families of the characteristic lines are curved, one can choose and , where c is constant. Then, the equations in (59) become
The equations in (56) can be rewritten as
Eliminating h in these equations using the second equation in (60) yields
It is convenient to introduce the new quantities, and , as
where n is constant. Differentiating these expressions with respect to and , one gets
Equations (62) and (64) combine to give
Put
Then, the equations in (65) become
It is convenient to introduce the new quantities, and , as
Then, the equations in (67) transform to
Put
The equations in (69) become
These equations are equivalent to the two telegraph equations:
Each of these equations is integrated by the method of Riemann.
Using (66) and (70), one can transform (60) and (63) to
The derivatives with respect to and can be represented as
Using (64) and (70), one can express the derivatives , , , and as
Equations (1) and (54) combine to give
Substituting (75) and (76) into (74) and eliminating h employing (73) yields
The equations in (68) can be solved for and . Then, utilizing (71), one can find
Equations (77) and (78) combine to give
In these equations, and are known functions of and due to a solution of the equations in (72). Moreover, is a known function of and due to (73). Therefore, the dependence of x and y on and can be found by integrating (79) along any path in the -space.
5.2. General Yield Criterion
It is understood in this section that and are the known functions of p given in the equations in (34). Then, Equations (4) and (5) become
Using a standard technique, one can find the characteristic directions as
It is seen from this equation that the system is hyperbolic if
It is assumed that this inequality is satisfied in what follows. Using a standard technique, one can find the characteristic relations as
These equations can immediately be integrated to give
where
The equations in (84) can be solved for and . As a result,
If both families of the characteristic lines are curved, one can choose and . Then, the equations in (86) become
Here, is the function inverse to . The equations in (81) can be rewritten as
In these equations, p can be eliminated using the second equation in (87). Therefore, the equations in (88) constitute the system of two equations for and .
Equations (1) and (74) combine to give
One can express the right-hand sides of these equations as functions of and employing (34) and (87). Therefore, the dependence of x and y on and can be found by integrating (89) along any path in the -space.
6. Final Equation Systems under Axial Symmetry
Equations (39), (45), and (51) can be represented as
where in Equation (39), in Equation (45), and in Equation (51). Equation (90) can be rewritten in the form
Then, Equations (4) and (5) become
Here, the second equation in (6) has been used to eliminate the derivative . Using a standard technique, one can find the characteristic curves as
It is seen from this equation that the characteristics are real if . It is assumed that this inequality is satisfied. The characteristic coordinates are denoted as . The upper sign in (93) corresponds to -curves and the lower sign to -curves. Using a standard technique, one can find the characteristic relations as
Equations (6), (74), and (91) yield
The equations in (93) can be rewritten as
and the equations in (94) as
Equations (96) and (97), together with one of the equations in (95), constitute the system of five equations for h, , , , and r. The equation for z follows from (6), (74), and (91) as
Equations (39), (46), and (52) can be treated similarly. In particular, Equation (90) should be replaced with
where in Equation (39), in Equation (46), and in Equation (52).
7. Conclusions
The present paper has reviewed and summarized the available results on geometric properties of principal stress trajectories in regions where a yield criterion is satisfied. Plane strain and axisymmetric problems have been considered. The final result for each yield criterion is a relation between the scale factors of the principal line coordinate system. Having these relations, one can reduce the boundary value problems in plasticity to purely geometric problems of finding orthogonal coordinate systems. The latter problems are represented by standard systems of partial differential equations, as described in Section 5. In most cases, these systems are hyperbolic.
The above is one of several available methods for solving boundary value problems. This method has not yet been employed for solving specific boundary value problems. Free surface problems constitute an important class of boundary value problem in plasticity [27,28]. Since a free surface coincides with an - or -coordinate curve, the method described in the present paper can efficiently solve free surface problems.
Author Contributions
Formal analysis, S.A. and M.R.; conceptualization, Y.L.; supervision, Y.L.; writing—original draft, S.A. and M.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research has been supported by the Foreign Expert Project from the Ministry of Science and Technology of China (G2022177004L).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This publication has been supported by the RUDN University Scientific Projects Grant System, project No. 202247-2-000.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Sadowsky, M.A. Equiareal pattern of stress trajectories in plane plastic strain. ASME J. Appl. Mech. 1941, 63, A74–A76. [Google Scholar] [CrossRef]
- Lippmann, H. Principal line theory of axially-symmetric plastic deformation. J. Mech. Phys. Solids 1962, 10, 111–122. [Google Scholar] [CrossRef]
- Besdo, D. Principal- and slip-line methods of numerical analysis in plane and axially-symmetric deformations of rigid/plastic media. J. Mech. Phys. Solids 1971, 19, 313–328. [Google Scholar] [CrossRef]
- Haderka, P.; Galybin, A.N. The stress trajectories method for plane plastic problems. Int. J. Solids Struct. 2011, 48, 450–462. [Google Scholar] [CrossRef]
- Chung, K.; Alexandrov, S. Ideal flow in plasticity. ASME Appl. Mech. Rev. 2007, 60, 316–335. [Google Scholar] [CrossRef]
- Hill, R. A remark on diagonal streaming in plane plastic strain. J. Mech. Phys. Solids 1966, 14, 245–248. [Google Scholar] [CrossRef]
- Richmond, O.; Morrison, H.L. Streamlined wire drawing dies of minimum length. J. Mech. Phys. Solids 1967, 15, 195–203. [Google Scholar] [CrossRef]
- Richmond, O.; Alexandrov, S. Nonsteady planar ideal plastic flow: General and special analytical solutions. J. Mech. Phys. Solids 2000, 48, 1735–1759. [Google Scholar] [CrossRef]
- Malvern, L.E. Introduction to the Mechanics of a Continuous Medium; Prentice-Hall: Hoboken, NJ, USA, 1969. [Google Scholar]
- Druyanov, B.; Nepershin, R. Problems of Technological Plasticity; Elsevier: Amsterdam, The Netherlands, 1994. [Google Scholar]
- Spencer, A.J.M. Deformation of ideal granular materials. In Mechanics of Solids; Hopkins, H.G., Sewell, M.J., Eds.; Pergamon Press: Oxford, UK, 1982; pp. 607–652. [Google Scholar]
- Cox, G.M.; Thamwattana, N.; McCue, S.W.; Hill, J.M. Coulomb–Mohr granular materials: Quasi-static flows and the highly frictional limit. ASME Appl. Mech. Rev. 2008, 61, 060802. [Google Scholar] [CrossRef]
- Coombs, W.M.; Crouch, R.S.; Heaney, C.E. Observations on Mohr-Coulomb plasticity under plane strain. J. Eng. Mech. 2013, 139, 1218–1228. [Google Scholar] [CrossRef]
- Paul, B. Generalized pyramidal fracture and yield criteria. Int. J. Solids Struct. 1968, 4, 175–196. [Google Scholar] [CrossRef]
- Torkamani, M.A.M. A linear yield surface in plastic cyclic analysis. Comp. Struct. 1986, 22, 499–516. [Google Scholar] [CrossRef]
- Billington, E.W. Generalized isotropic yield criterion for incompressible materials. Acta Mech. 1988, 72, 1–20. [Google Scholar] [CrossRef]
- Kolupaev, V.A.; Yu, M.H.; Altenbach, H. Yield criteria of hexagonal symmetry in the π-plane. Acta Mech. 2013, 224, 1527–1540. [Google Scholar] [CrossRef]
- Meyer, J.P.; Labuz, J.F. Linear failure criteria with three principal stresses. Int. J. Rock. Mech. Min. Sci. 2013, 60, 180–187. [Google Scholar] [CrossRef]
- Druyanov, B. Technological Mechanics of Porous Bodies; Clarendon Press: New York, NY, USA, 1993. [Google Scholar]
- Alexandrov, S.; Date, P. A general method of stress analysis for a generalized linear yield criterion under plane strain and plane stress. Continuum Mech. Thermodyn. 2019, 31, 841–849. [Google Scholar] [CrossRef]
- Kingston, M.R.; Spencer, A.J.M. General yield conditions in plane deformations of granular media. J. Mech. Phys. Solids 1970, 18, 233–243. [Google Scholar] [CrossRef]
- Green, R.J. A plasticity theory for porous solids. Int. J. Mech. Sci. 1972, 14, 215–224. [Google Scholar] [CrossRef]
- Alexandrov, S.; Jeng, Y.-R. A method of finding stress solutions for a general plastic material under plane strain and plane stress conditions. J. Mech. 2021, 37, 100–107. [Google Scholar] [CrossRef]
- Alexandrov, S.; Lyamina, E.A.; Nguyen-Thoi, T. Geometry of principal stress trajectories for a Tresca material under axial symmetry. J. Phys. Conf. Ser. 2018, 1053, 012048. [Google Scholar] [CrossRef]
- Alexandrov, S.; Jeng, Y.-R. Geometry of principal stress trajectories for piece-wise linear yield criteria under axial symmetry. ZAMM J. Appl. Math. Mech. 2020, 100, e20190077. [Google Scholar] [CrossRef]
- Hill, R. Basic stress analysis of hyperbolic regimes in plastic media. Math. Proc. Cambr. Phil. Soc. 1980, 88, 359–369. [Google Scholar] [CrossRef]
- McCue, S.W.; Hill, J.M. Free surface problems for static Coulomb-Mohr granular solids. Math. Mech. Solids 2005, 10, 651–672. [Google Scholar] [CrossRef]
- Ntovoris, E.; Regis, M. A solution with free boundary for non-Newtonian fluids with Drucker–Prager plasticity criterion. ESAIM Control Optim. Calc. Var. 2019, 25, 46. [Google Scholar] [CrossRef]
Figure 1.
Principal line coordinate system.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Alexandrov, S.; Rynkovskaya, M.; Li, Y. Principal Stress Trajectories in Plasticity under Plane Strain and Axial Symmetry. Symmetry 2023, 15, 981. https://doi.org/10.3390/sym15050981
AMA Style
Alexandrov S, Rynkovskaya M, Li Y. Principal Stress Trajectories in Plasticity under Plane Strain and Axial Symmetry. Symmetry. 2023; 15(5):981. https://doi.org/10.3390/sym15050981
Chicago/Turabian StyleAlexandrov, Sergei, Marina Rynkovskaya, and Yong Li. 2023. "Principal Stress Trajectories in Plasticity under Plane Strain and Axial Symmetry" Symmetry 15, no. 5: 981. https://doi.org/10.3390/sym15050981
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.