
Research on Heat Transfer through a Double-Walled Heat Shield of a Firefighting Robot
 , ,
, ,  ,
,
Abstract
:1. Introduction
- Conditions imposed by engine type:
- The possibility of flaws in the design/realization of the robot, as these will be at technology readiness level 2 (TRL2) in the research center laboratory;
- The lack of specialized laboratory equipment for the mechanical processing of high-temperature-resistant materials;
- Developing an analytical–numerical model for heat transfer process calculation;
- High-temperature protection system testing and evaluation.
2. Theoretical Aspects
3. Analytical Model for the Stationary Case of Heat Transfer by Radiation
- There will be two surface resistors for each plate of the heat shield and one for each radiation plane. When the emissivity of all surfaces is equal, then all surface resistances (2n + 2) will have the same value: .
- If there are (n + 1) spatial resistances, the configuration factor for each will be equal to the unit.
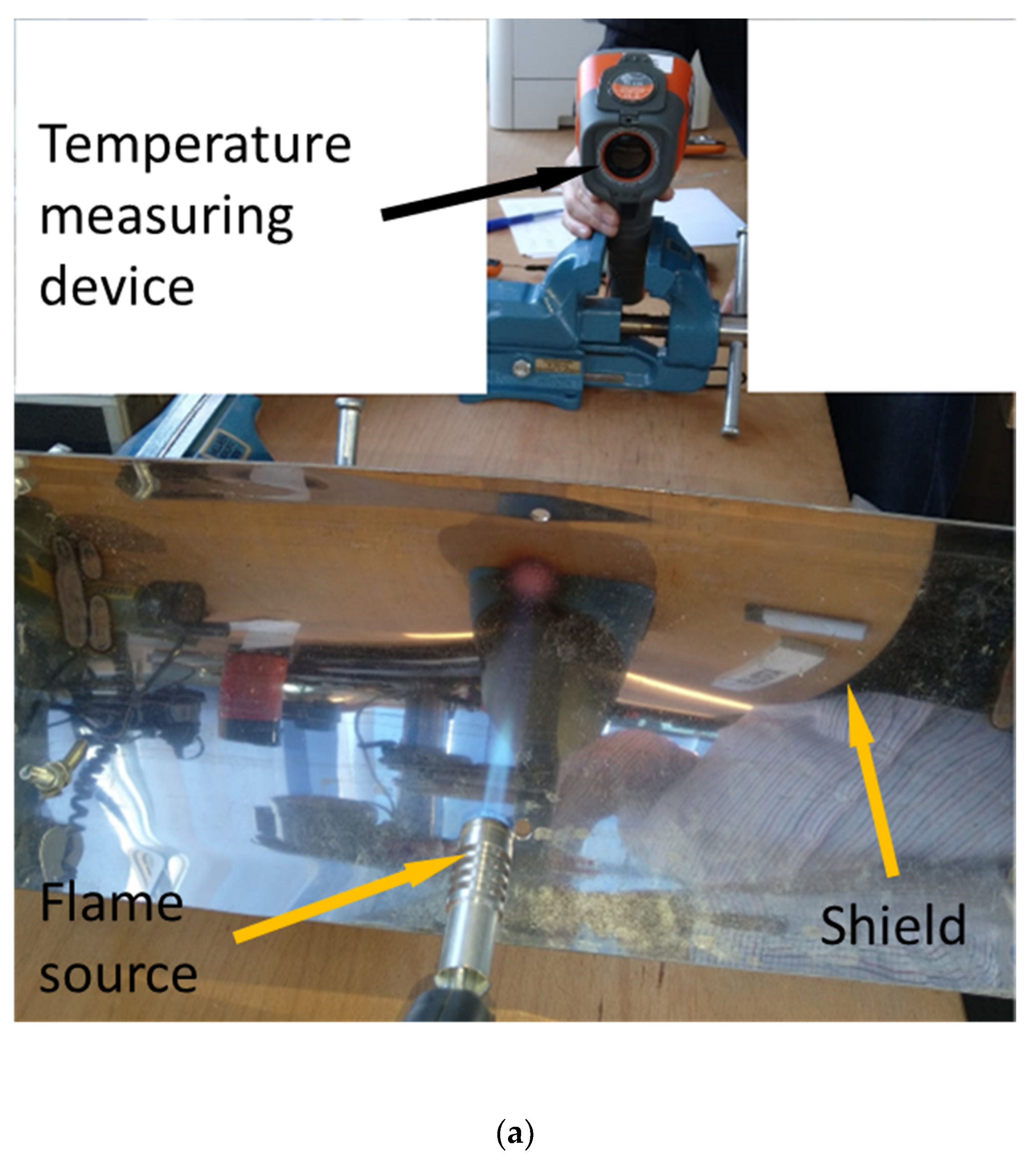
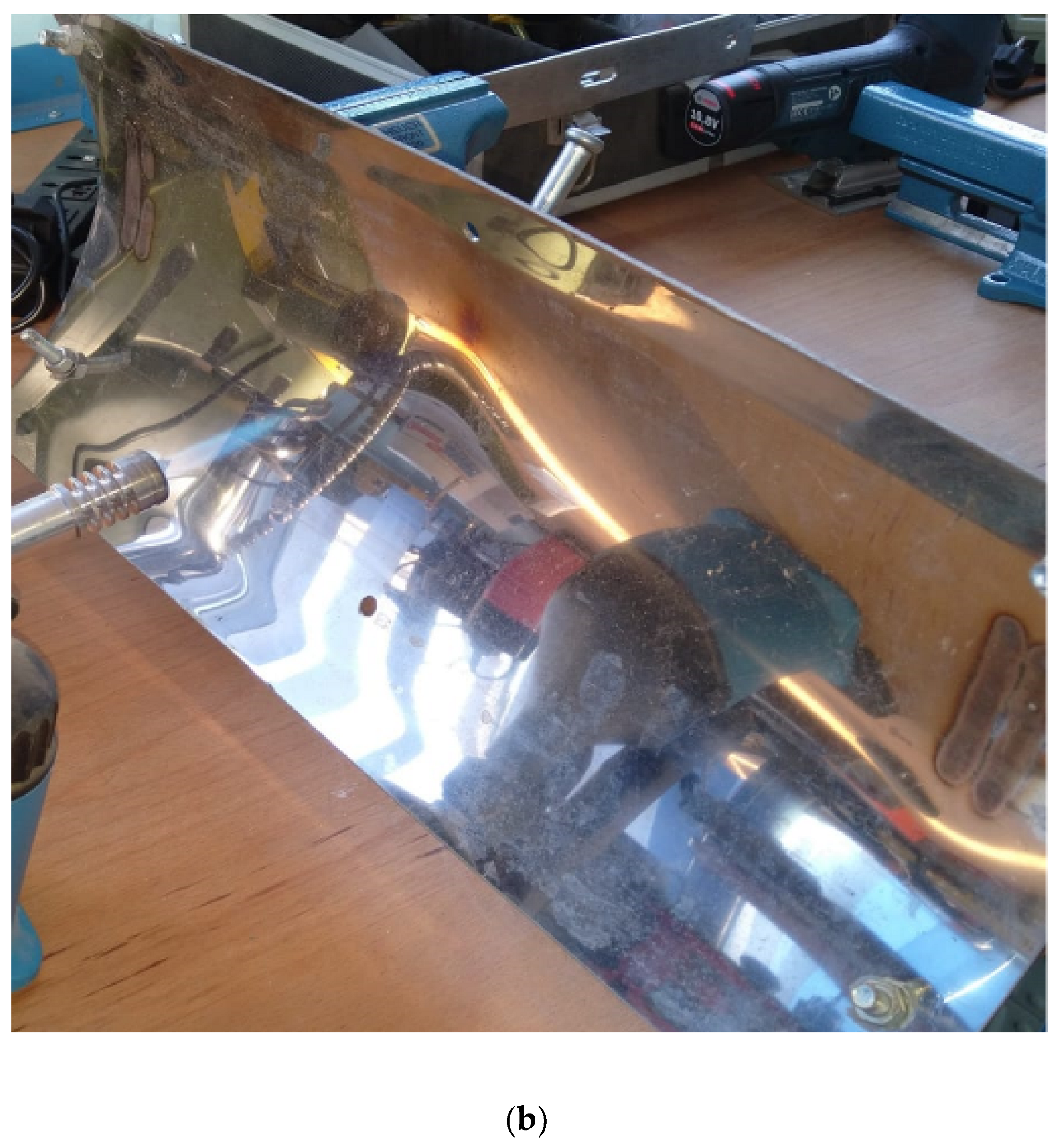
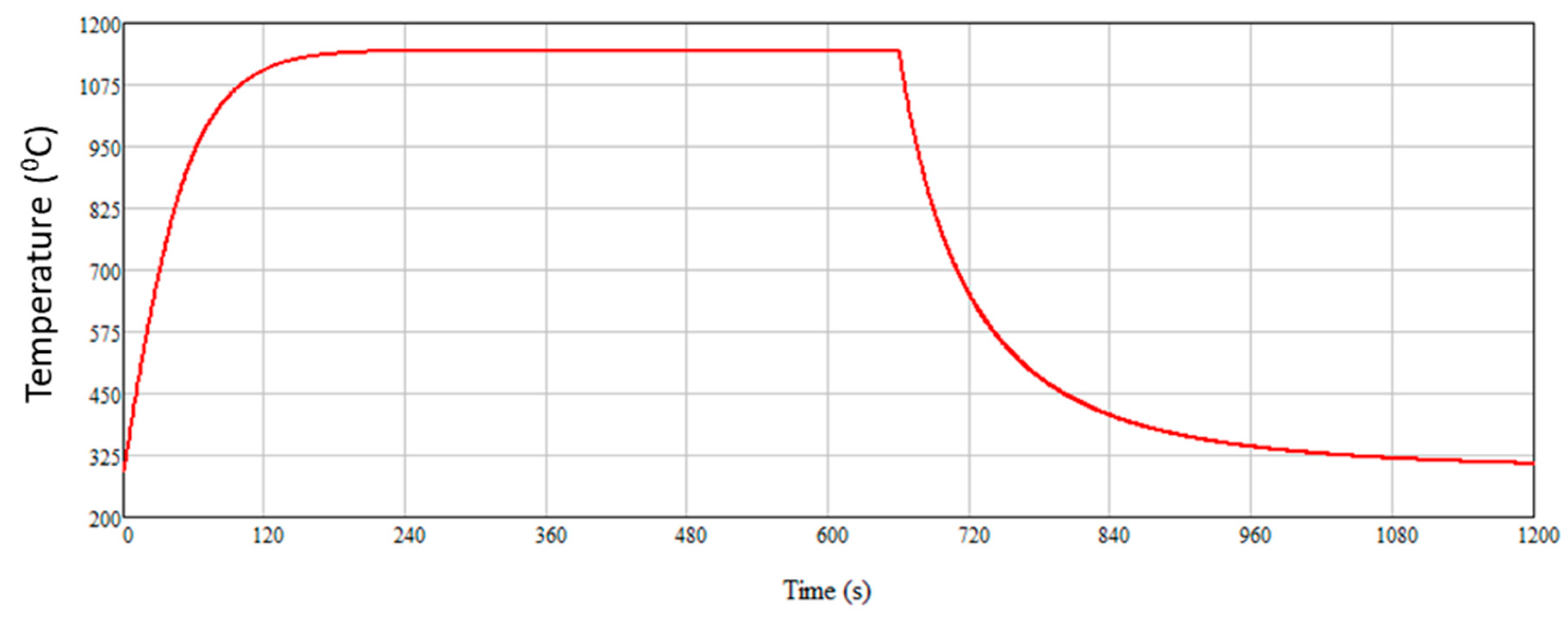
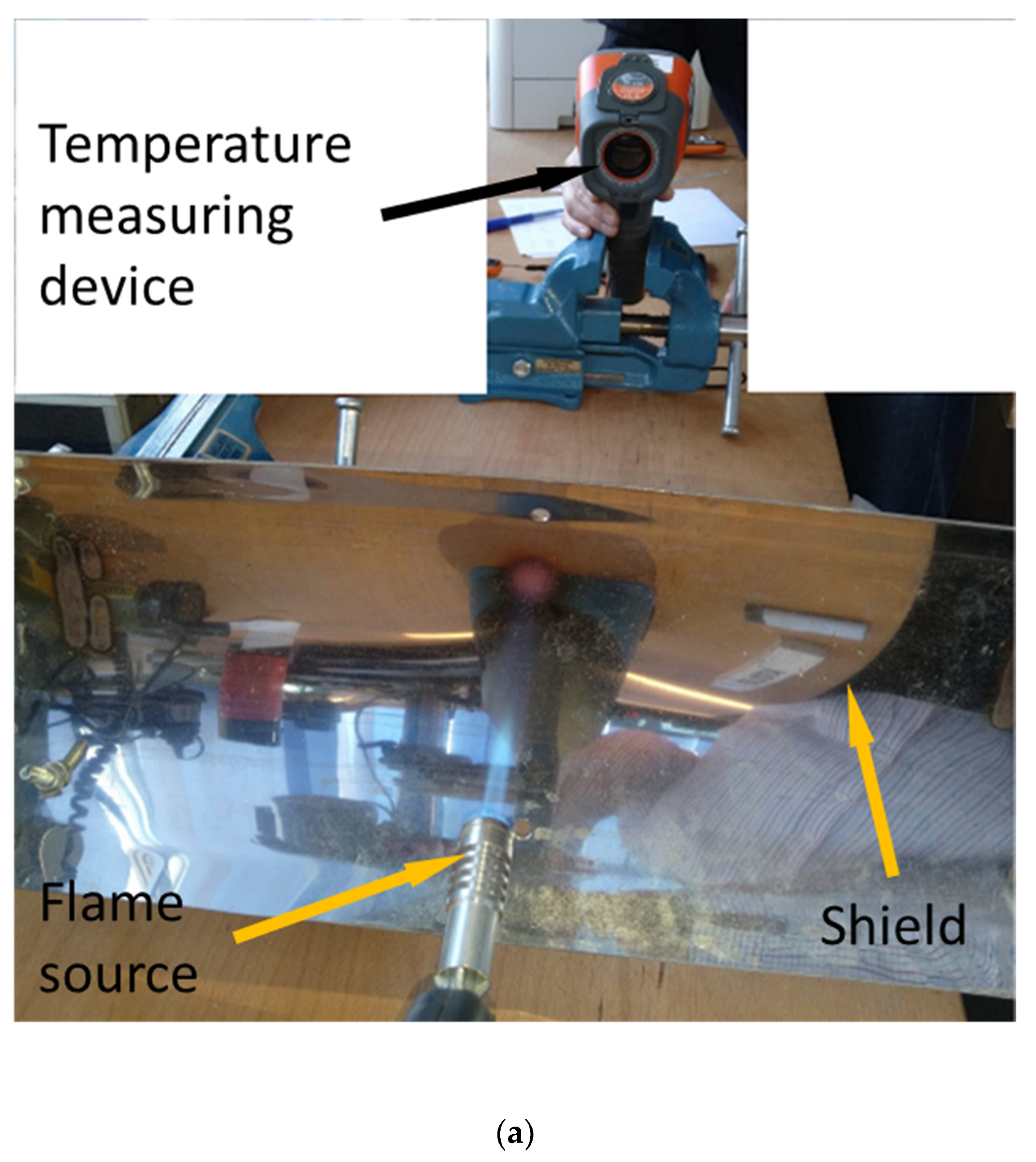
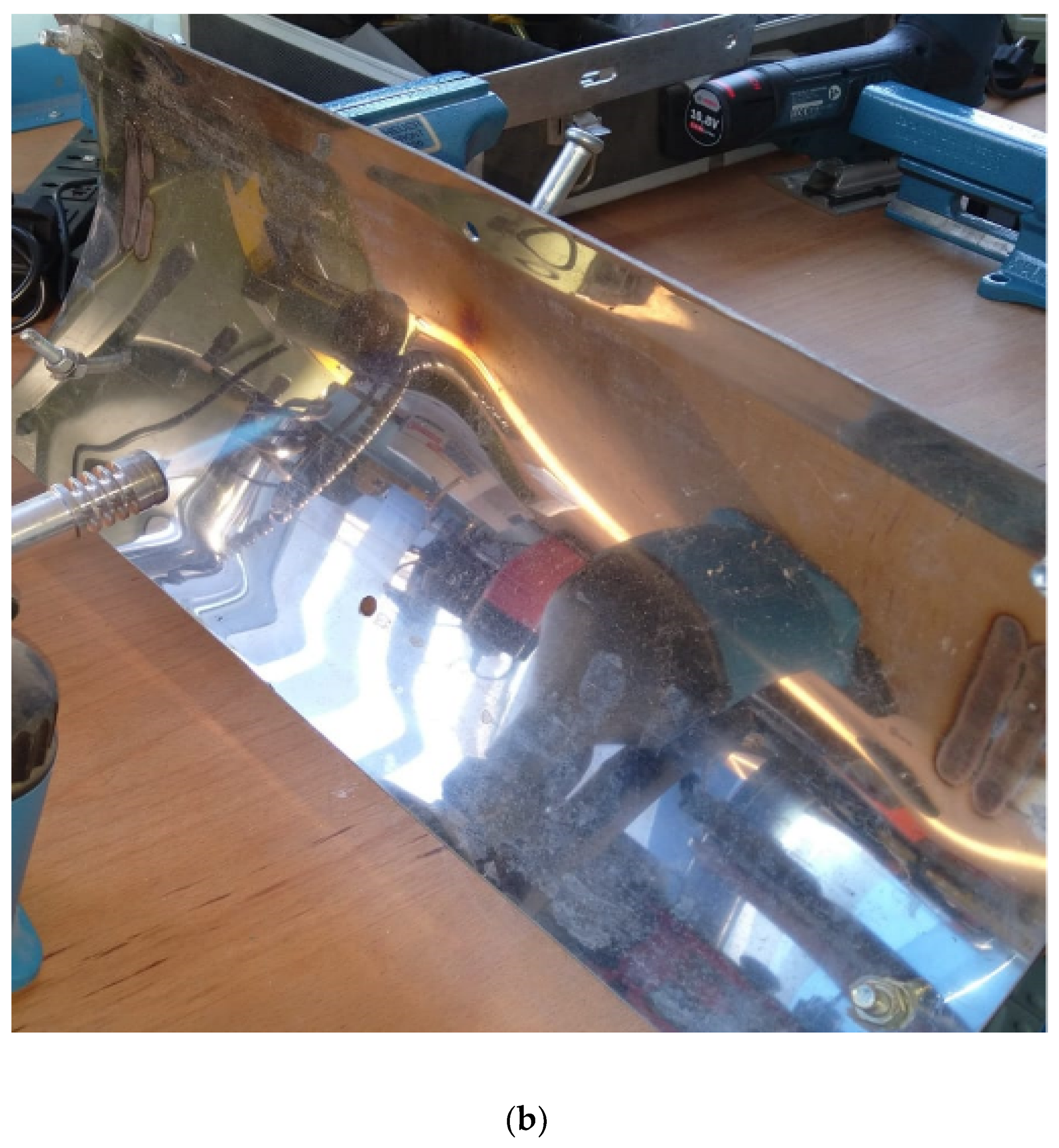
4. Experimental Study on the Behavior of the Thermal Shield to the Action of Fire
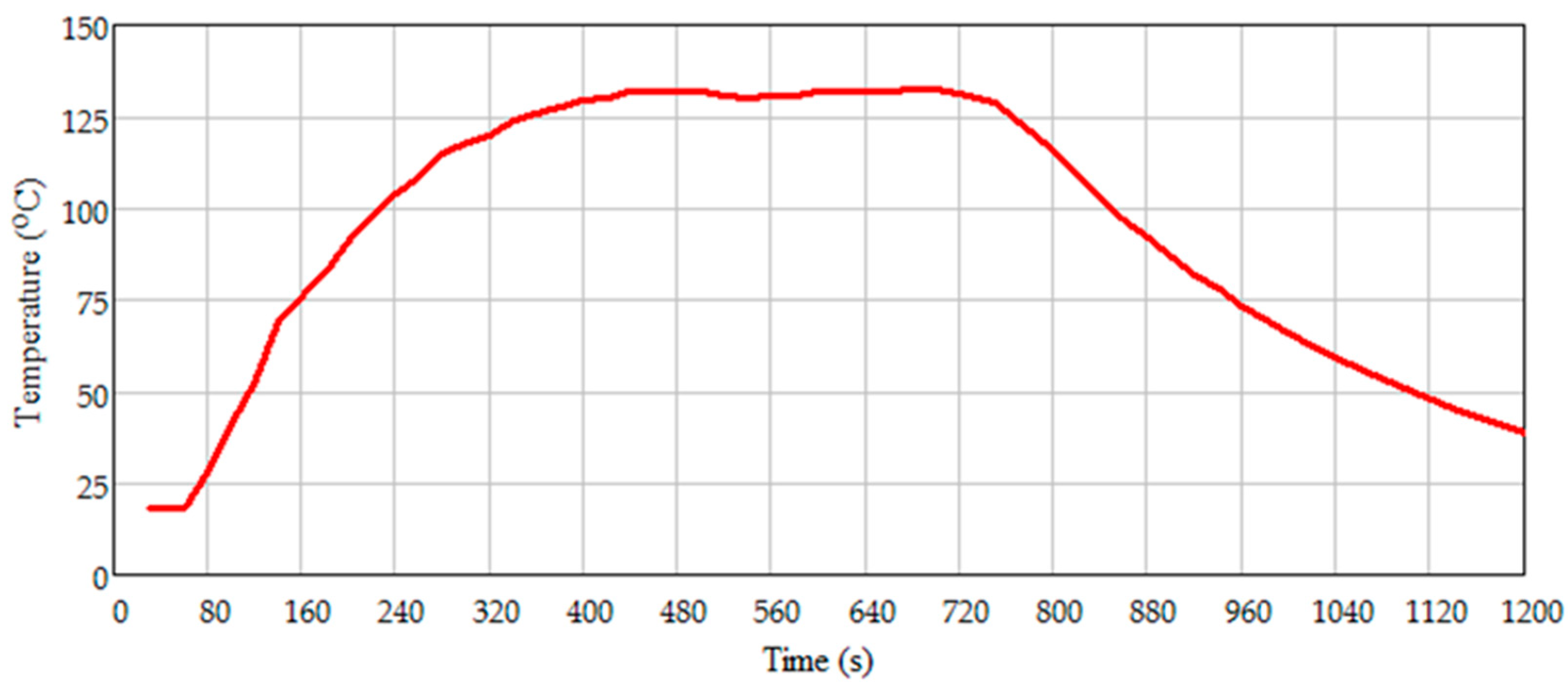
- In the temperature range of 250–160 °C, the speed is about 0.6 m/s;
- In the temperature range of 160–135 °C, the speed is about 0.5 m/s;
- In the temperature range of 130–70 °C, the speed is about 0.4 m/s.
- From 132.5 to 100 °C, the speed was about 1.1 m/s near the first shield exposed to the flame and 0.6 m/s for the second;
- From 100 to 80 °C, the speed was about 1 m/s near the first shield and 0.5 m/s for the second.
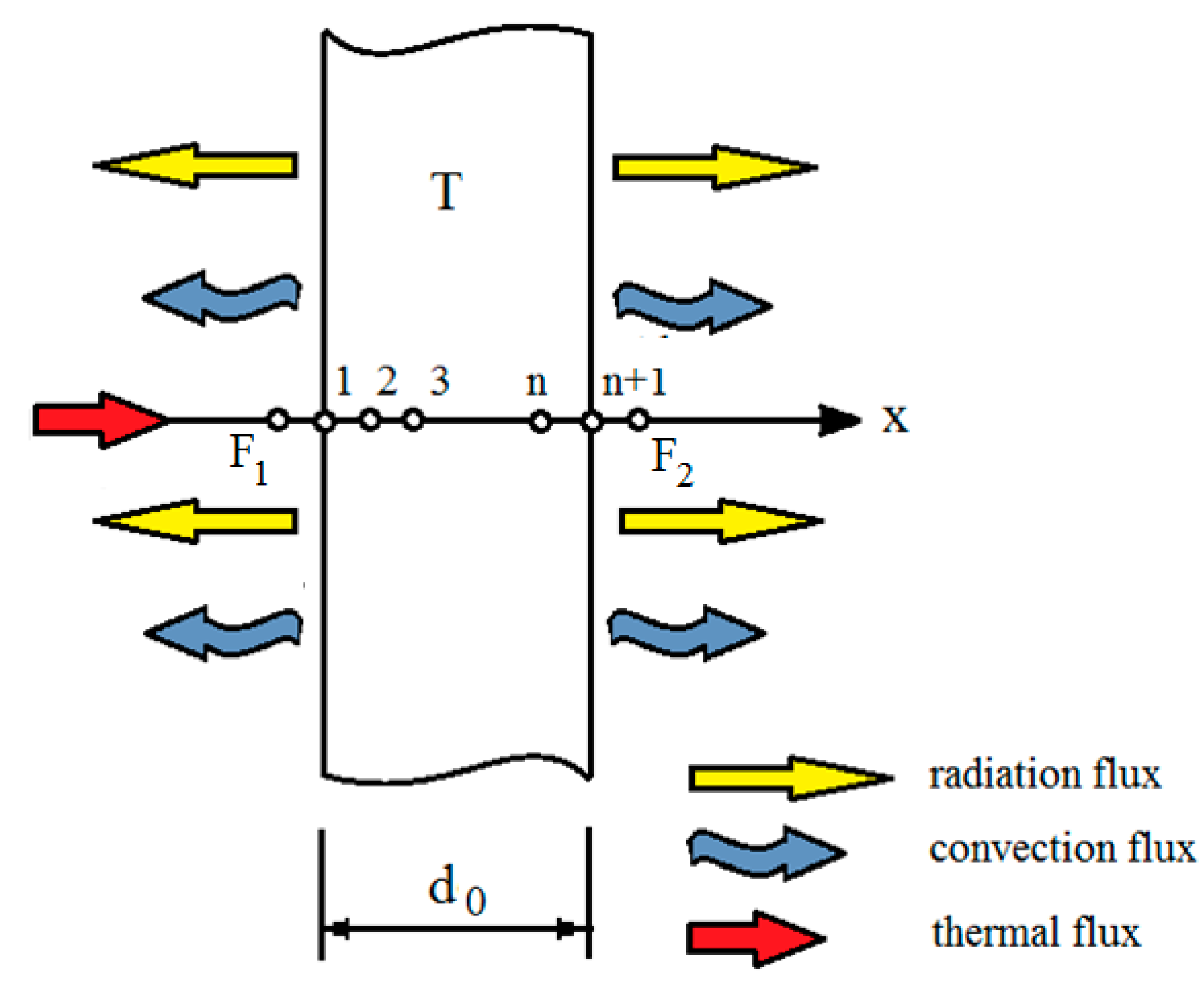
5. Analytical Model for the Non-Stationary Case of Heat Transfer by Radiation, Convection, and Conduction
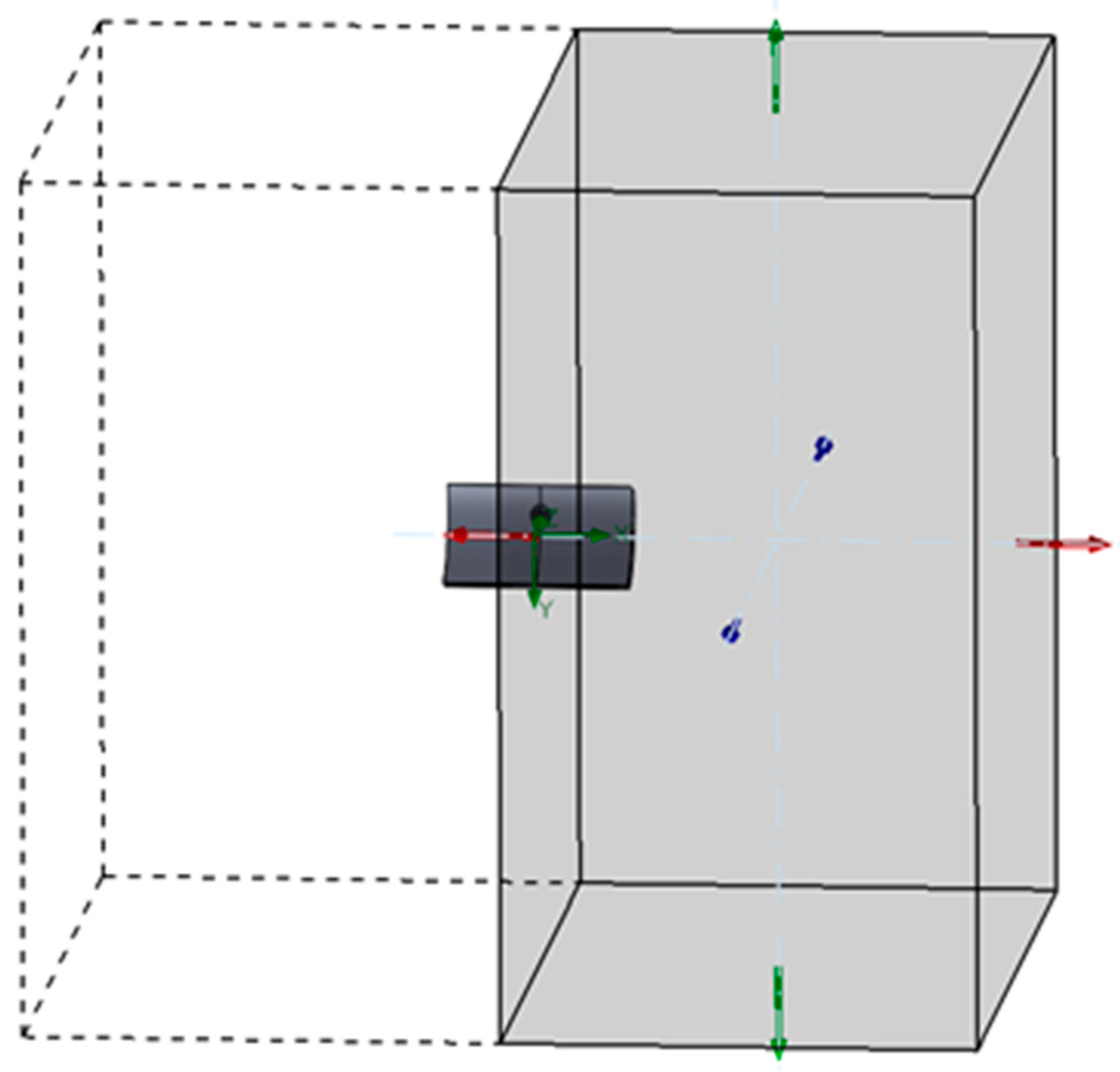
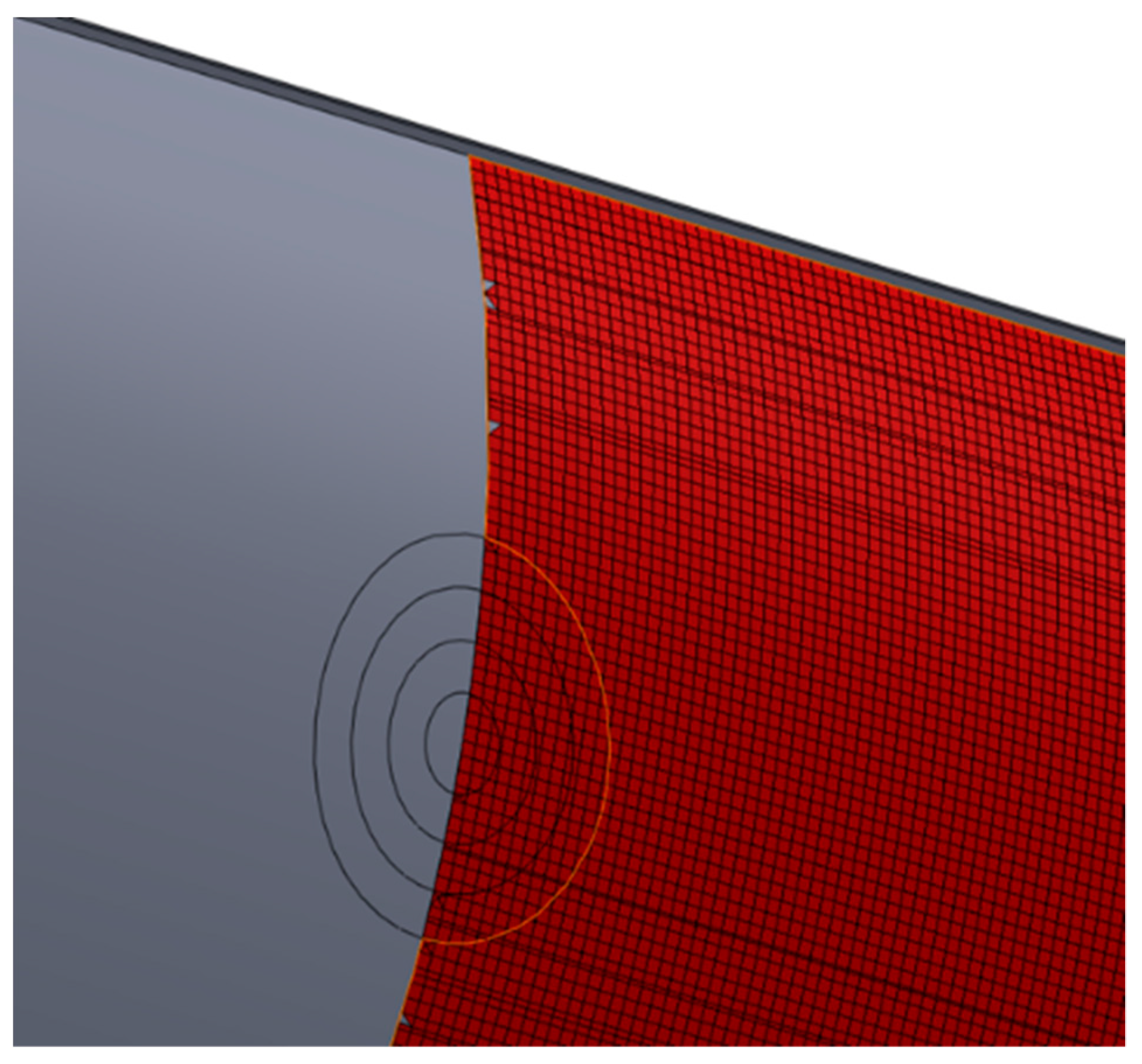
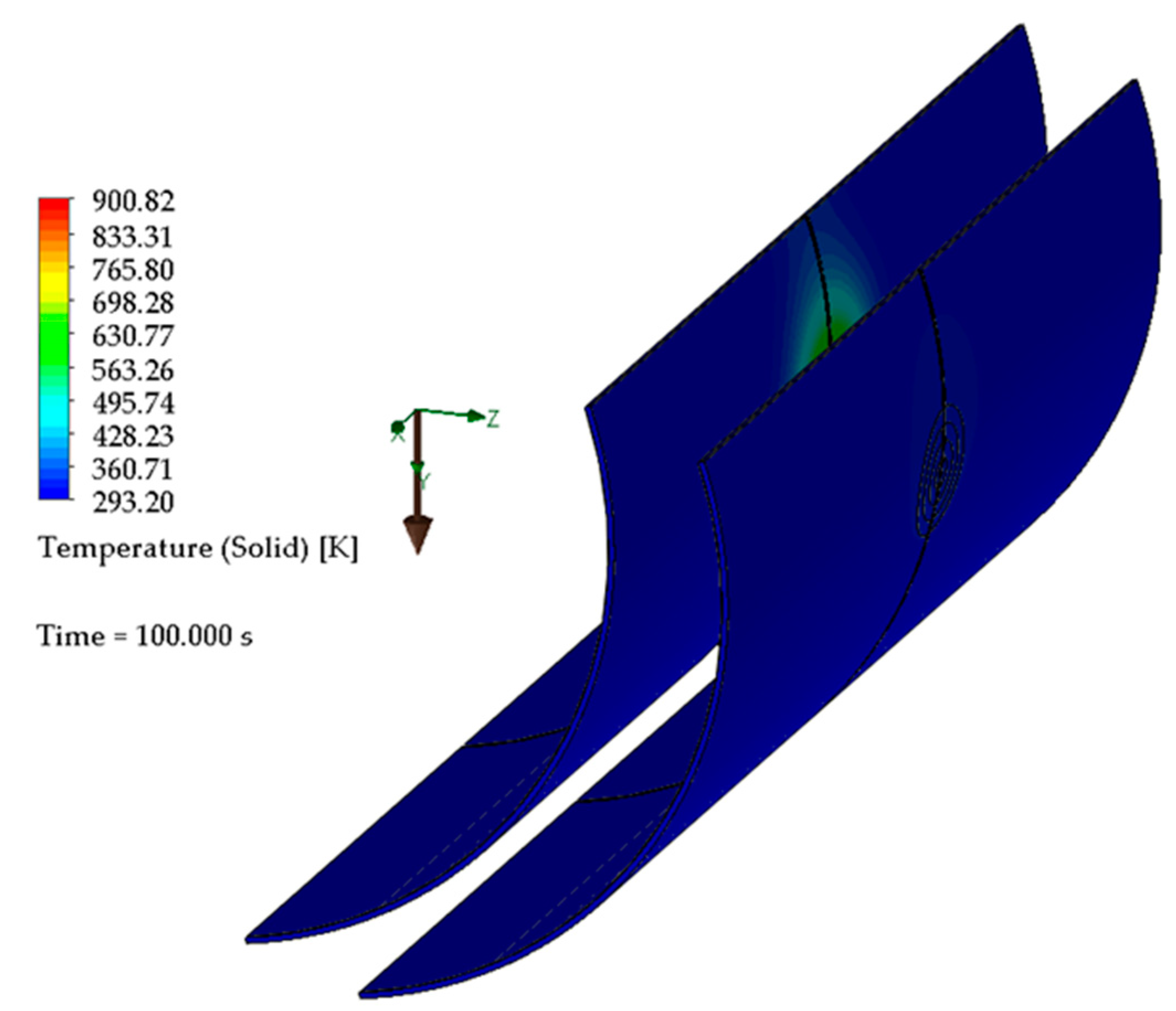
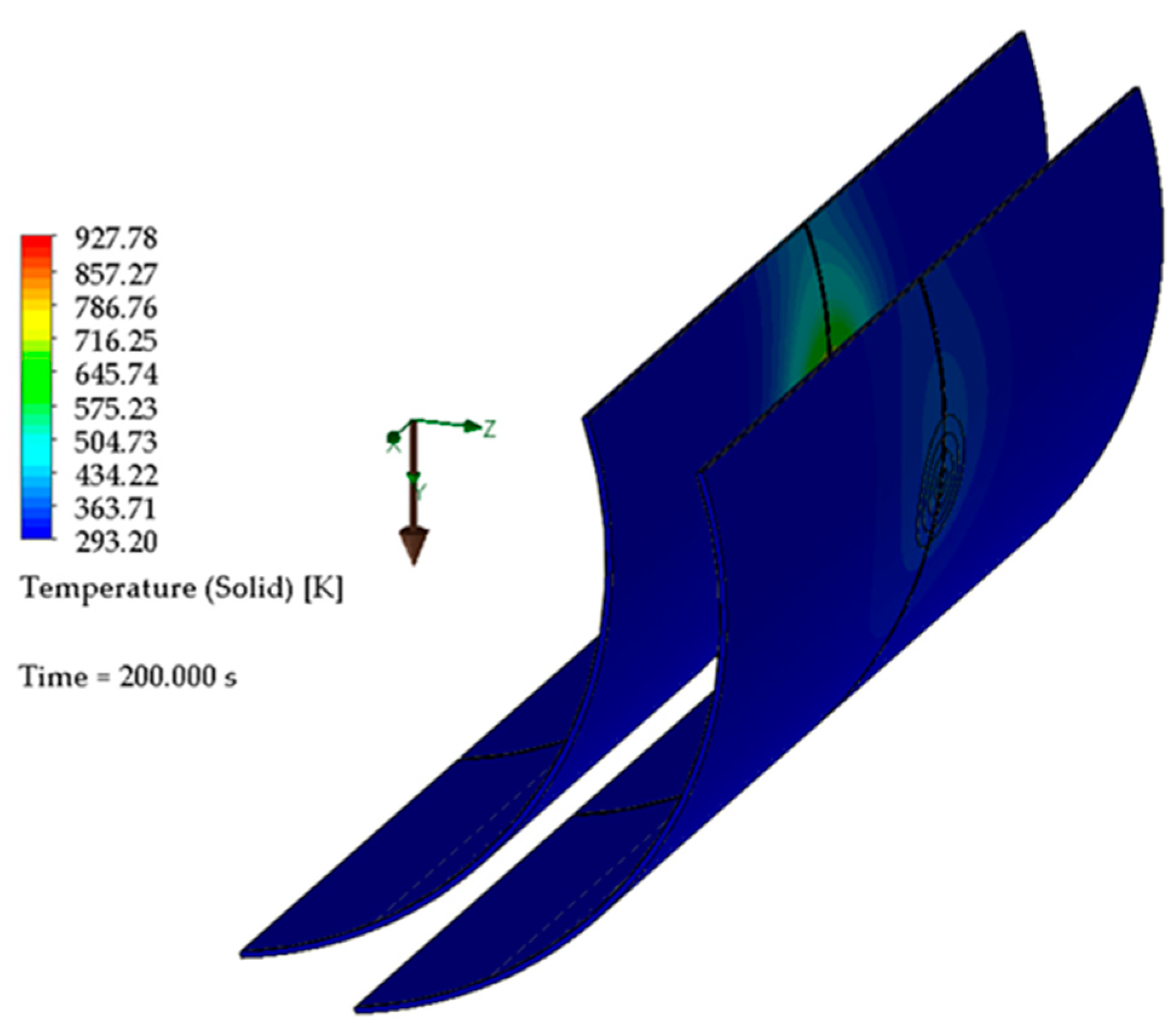
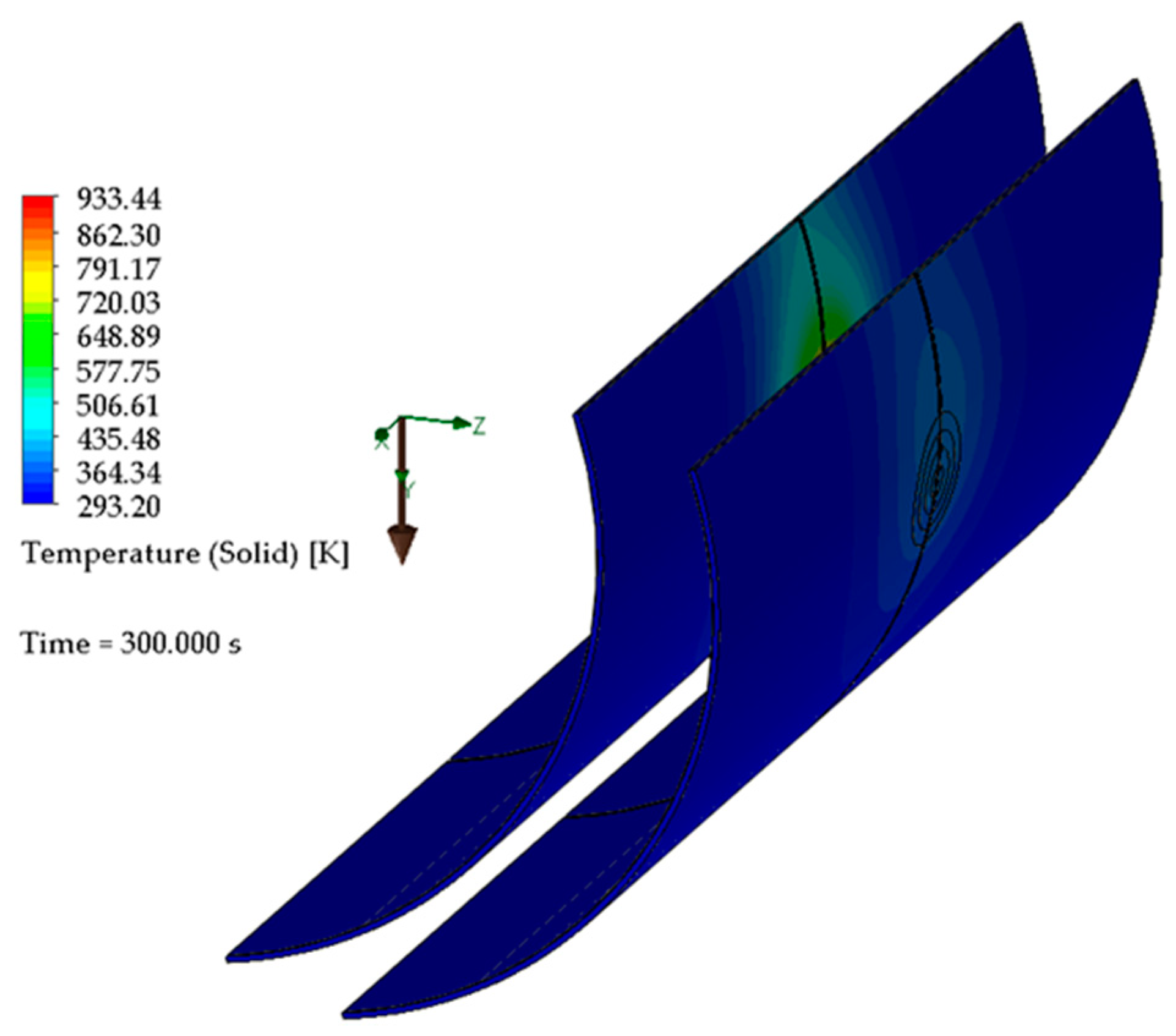
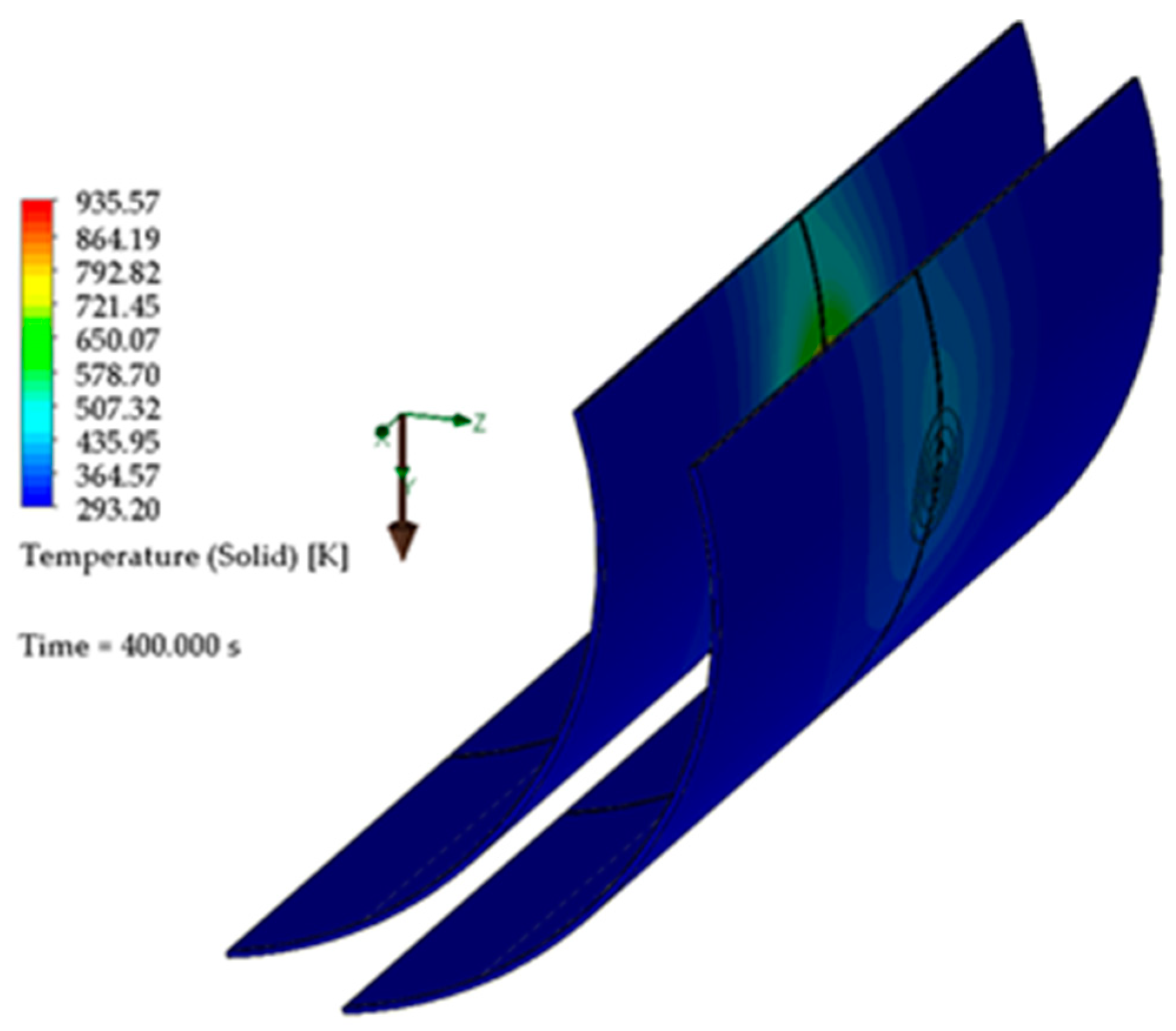
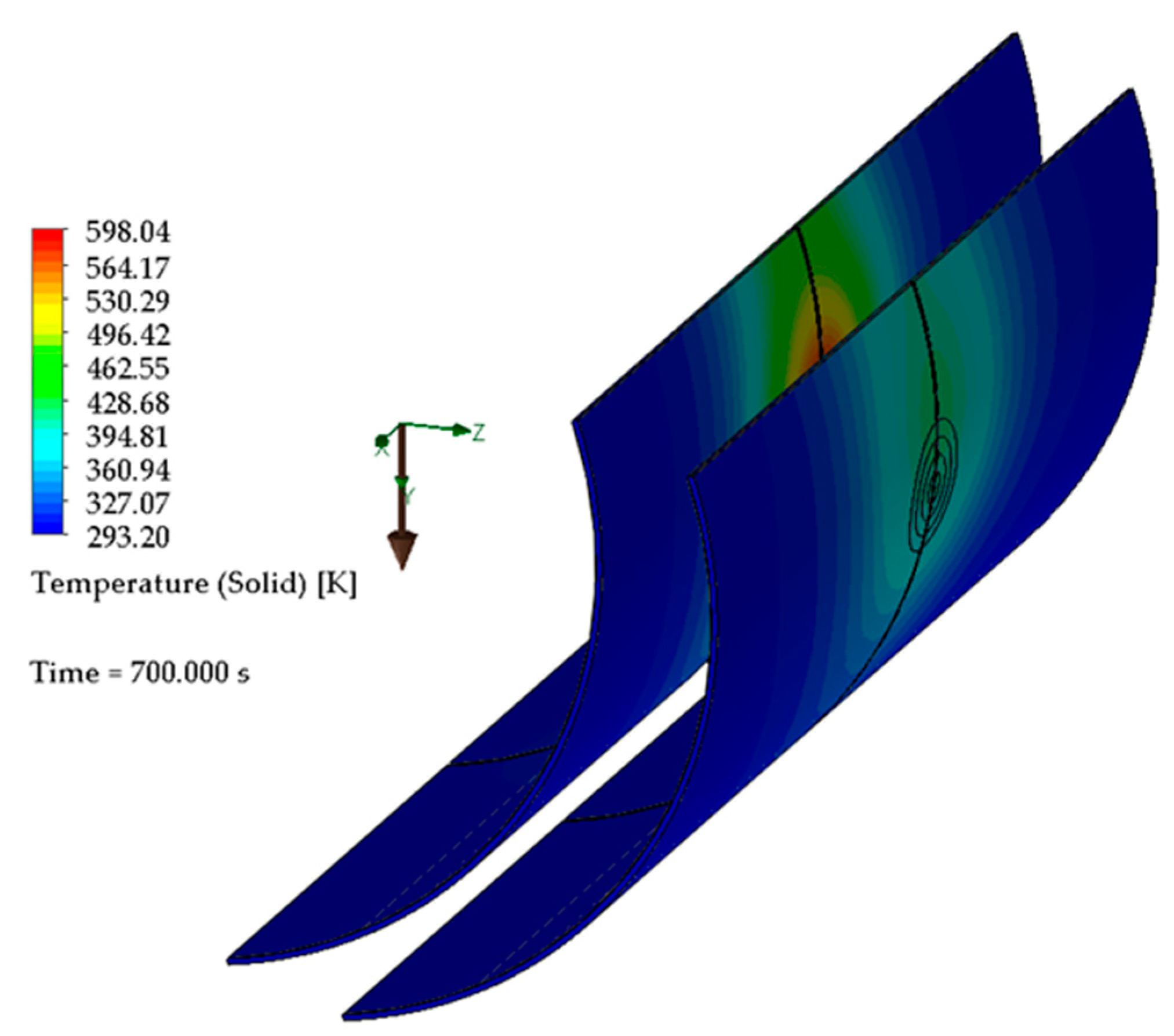
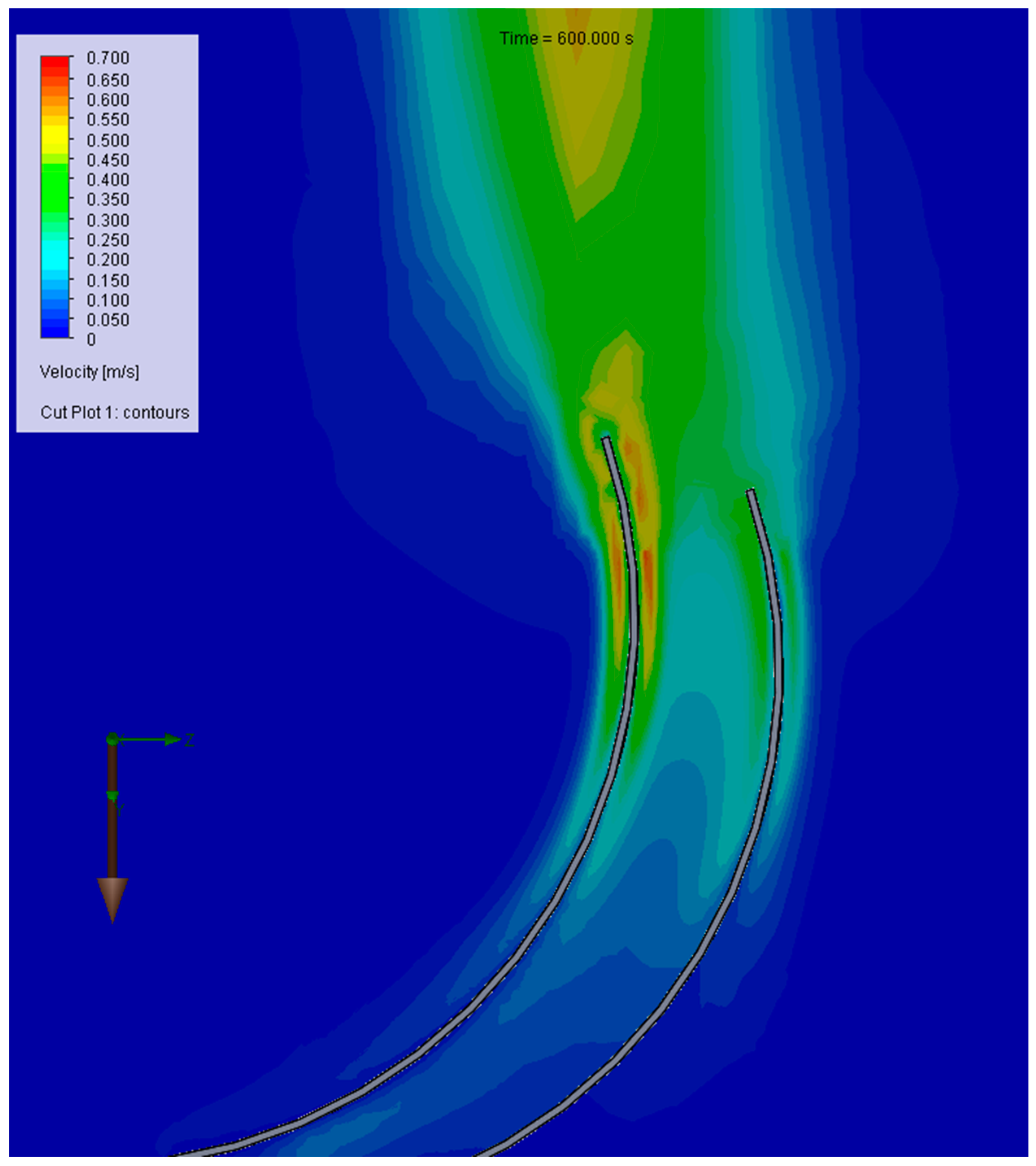
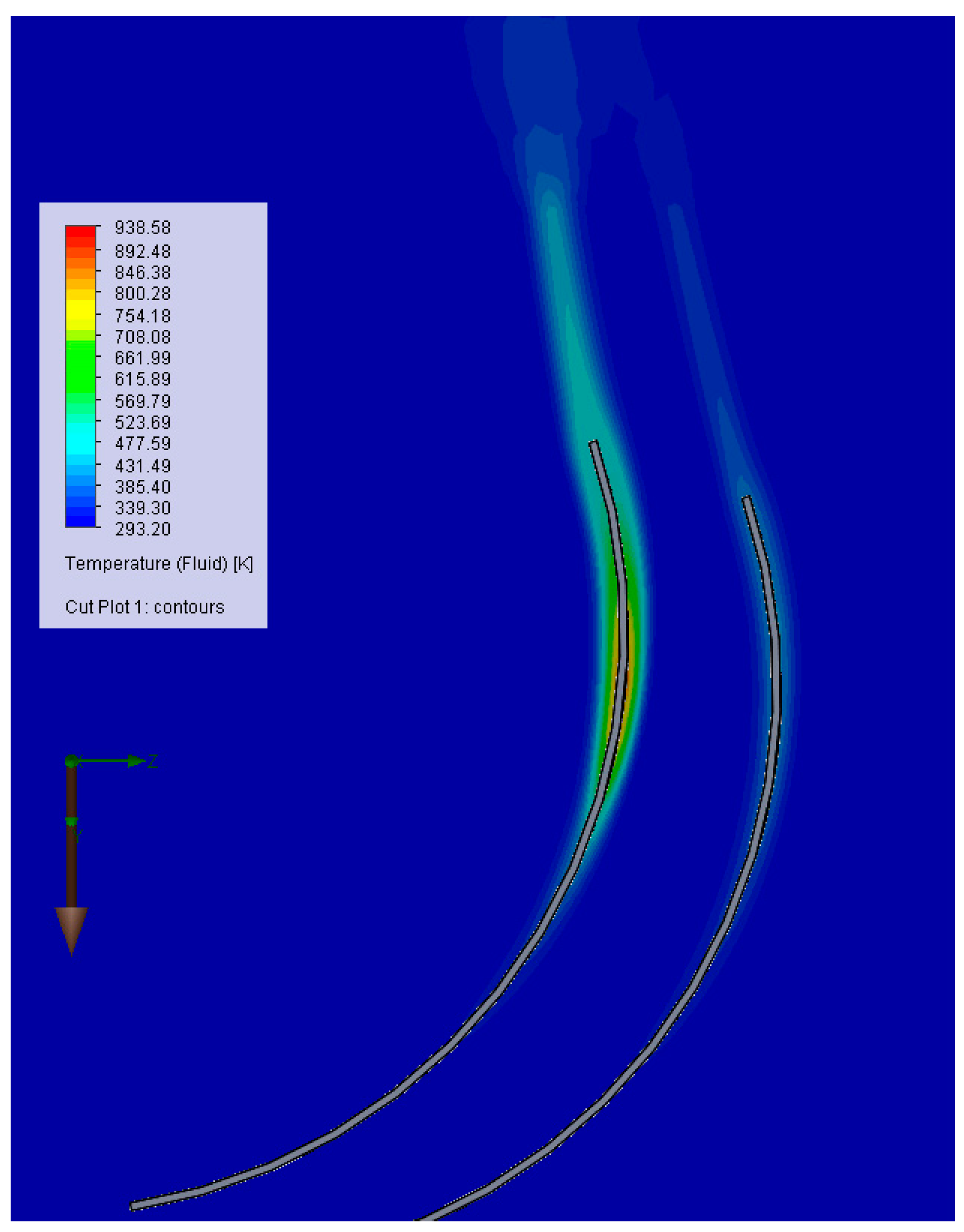
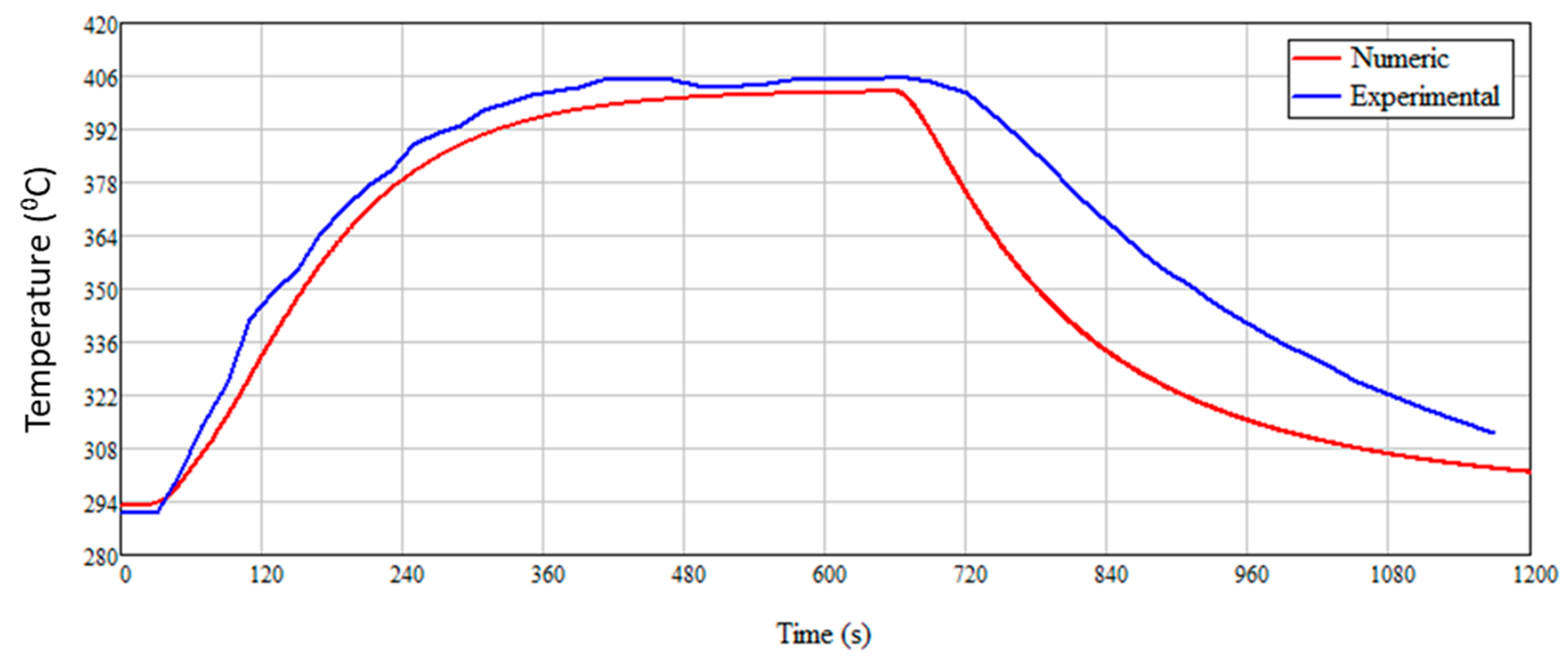
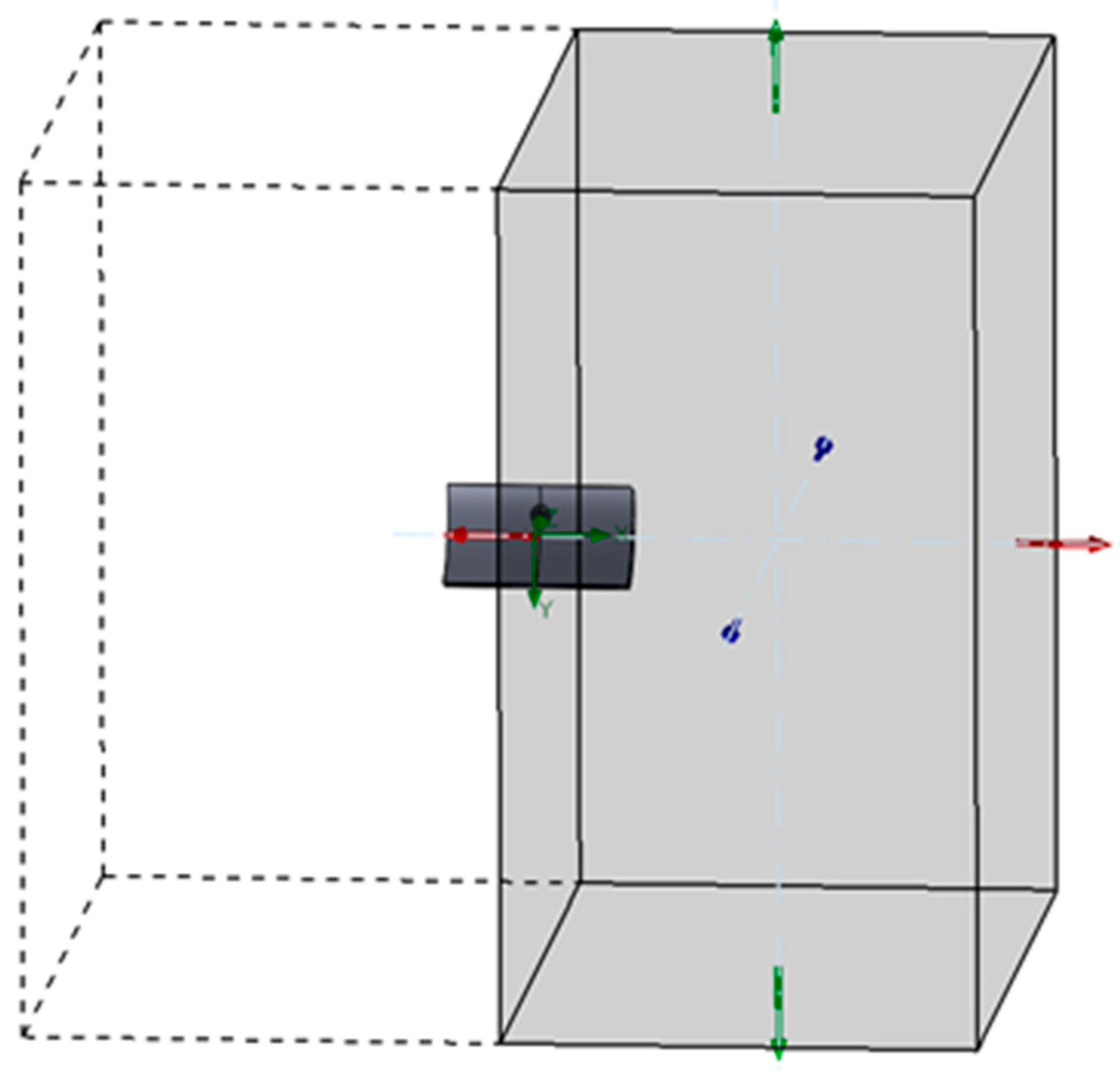
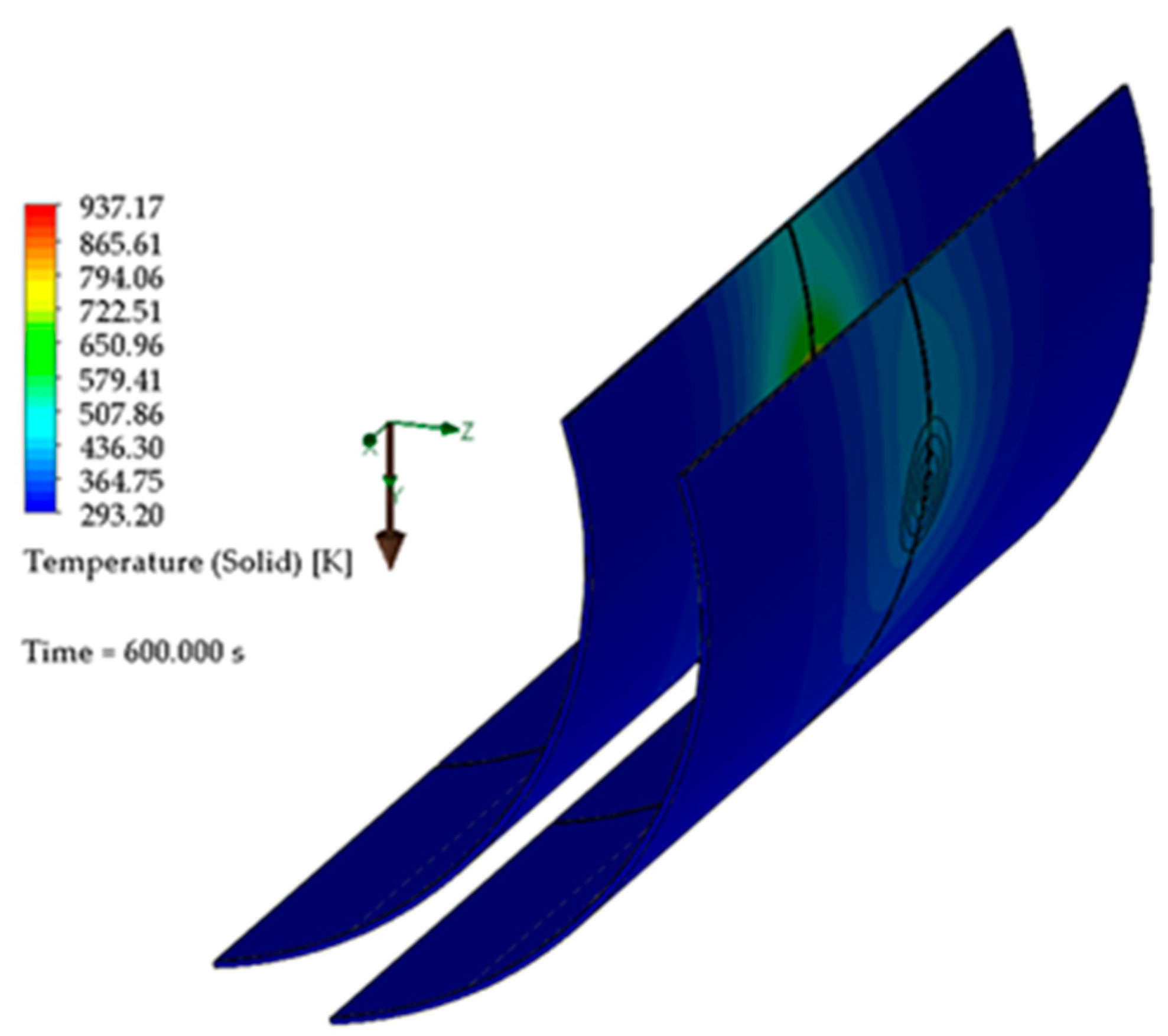
6. Transfer Modeling with the Finite Volume Method
7. Conclusions
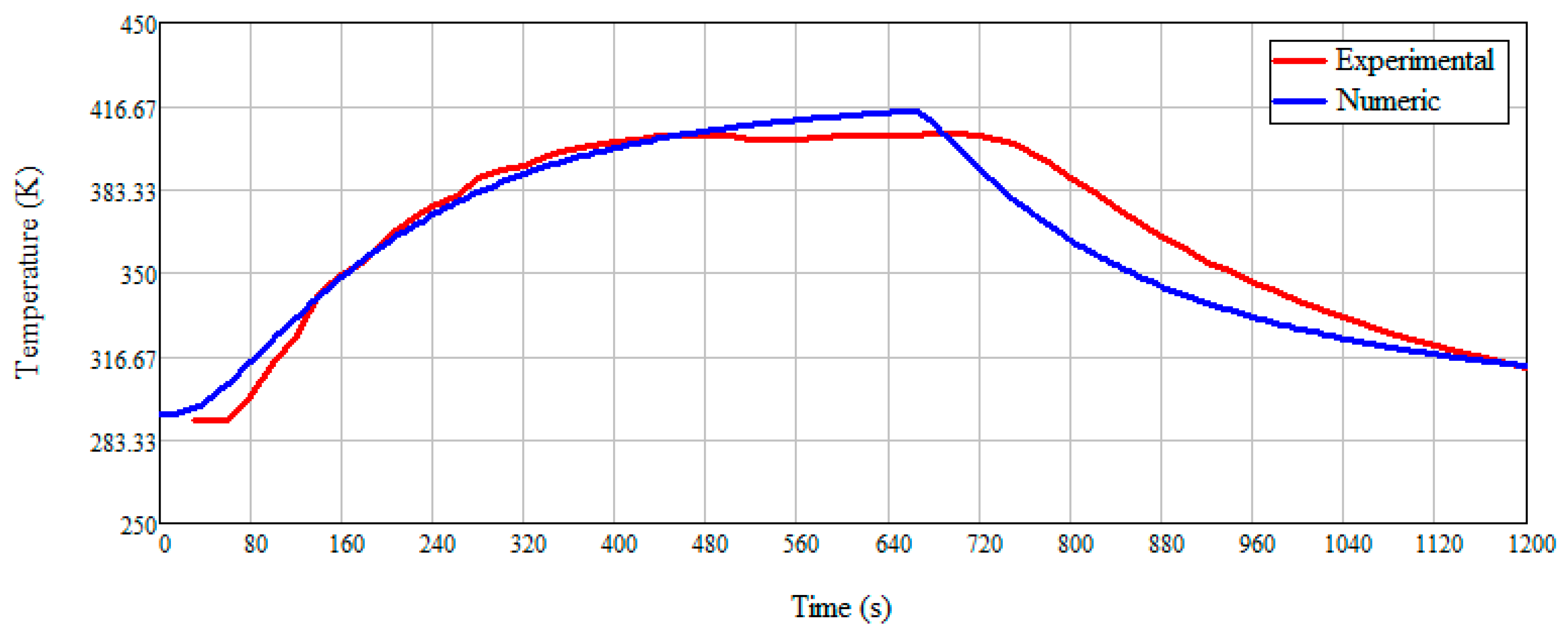
- Estimating the evolution of temperature using analytical and numerical methods was satisfying, the most complex problems being related to convective heat transfer and determining the convection heat transfer coefficient;
- Following the simulation, it was possible to identify parameters that needed to be measured to allow the correlation of calculations from the numerical analysis with the Finite Difference Method (FDM);
- The evolution of the heating phenomenon over time showed us that, due to the special properties of stainless steel, temperature gradients increased moderately;
- The introduction of the second wall to the protection shield demonstrated a decrease in temperature on the second shield, but under low ambient temperature;
- Because the open flame was a hot air jet, the problem of a reverse analysis for modeling the gas fluid jet appeared, but this may be the subject of another research.
8. Further Directions of Development
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviations | Explanation |
| Stefan–Boltzmann’s constant | |
| Emissivity | |
| Surface | |
| Thermal conductivity coefficient | |
| Shape factor | |
| Eb | Blackbody emissive power |
| Specific heat of stainless steel | |
| Density of stainless steel | |
| Time | |
| Temperature of the fire, at a certain moment | |
| Temperature in stainless steel considered uniform at the same time | |
| Perimeter | |
| The gross cross-sectional area | |
| Factor of the section, namely the ratio between the heated perimeter | |
| The heat transfer coefficient by convection and radiation | |
| Fourier number | |
| The thermal diffusivity coefficient | |
| The heat flux received by the wall | |
| The convective heat flux from the wall to the external environment | |
| The radiative heat flux |
References
- Grigore, L.Ș.; Soloi, A.; Tiron, O.; Răcuciu, C. Fundamentals of Autonomous Robot Classes with a System of Stabilization of the Gripping Mechanism. In Proceedings of the 2012 International Conference on Nano Materials and Electric Devices (ICNMED 2012), Hong Kong, China, 19–20 December 2012; Volume 646, pp. 164–170. [Google Scholar]
- Nuță, I.; Orban, O.; Grigore, L.Ș. Development and improvement of technology in emergency response. Procedia Econ. Financ. 2015, 32, 603–609. [Google Scholar] [CrossRef] [Green Version]
- Peskoe-Yang, L. Paris Firefighters Used This Remote-Controlled Robot to Extinguish the Notre Dame Blaze. In IEEE Spectrum: Technology, Engineering, and Science News; 2019; Available online: https://spectrum.ieee.org/colossus-the-firefighting-robot-that-helped-save-notre-dame (accessed on 13 October 2022).
- Raghavendran, P.S.; Suresh, M.; Ranjith Kumar, R.; Ashok Kumar, R.; Mahendran, K.; Swathi, S.; Kamesh, L.; Sanjay, R. An Intelligent Remote-Controlled Fire Fighting Machine for Autonomous Protection of Human being. Int. J. Adv. Res. Sci. Eng. Technol. 2018, 5, 7620–7626. [Google Scholar]
- Nikitin, V.; Golubin, S.; Belov, R.; Gusev, V.; Andrianov, N. Development of a robotic vehicle complex for wildfire-fighting by means of fire-protection roll screens. IOP Conf. Ser. Earth Environ. Sci. 2019, 226, 012003. [Google Scholar] [CrossRef]
- Steopan, M.; Schonstein, C.; Bogdan, A.V. Mobile Robotic Platform for Firefighting—Concept Development, Finissing and Mockup Buildup. J. Acta Tech. Napoc. Ser. Appl. Math. Mech. Eng. 2020, 63, 269–274. [Google Scholar]
- Kurvinen, K.; Smolander, P.; Pöllänen, R.; Kuukankorpi, S.; Kettunen, M.; Lyytinen, J. Design of a Radiation Surveillance Unit for an Unmanned Aerial Vehicle. J. Environ. Radioact. 2005, 81, 1–10. [Google Scholar] [CrossRef]
- Zhang, K.; Hutson, C.; Knighton, J.; Hermann, G.; Scott, T. Radiation Tolerance Testing Methodology of Robotic Manipulator Prior to Nuclear Waste Handling. Front. Robot. AI 2020, 7, 10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, J.; Pan, L.; Zhao, G. An Improved Near-Field Computer Vision for Jet Trajectory Falling Position Prediction of Intelligent Fire Robot. Sensors 2020, 20, 7029. [Google Scholar] [CrossRef]
- Anderson, J.; Lee, D.J.; Schoenberger, R.; Wei, Z.; Archibald, Z.K. Semi-Autonomous Unmanned Ground Vehicle Control System. In Unmanned Systems Technology VIII, Proceedings of the Defense and Security Symposium, Orlando (Kissimmee), FL, USA, 17–21 April 2006; Society of Photo Optical: Bellingham, WA, USA, 2006. [Google Scholar]
- Grigore, L.Ș.; Priescu, I.; Joița, D.; Holban-Oncioiu, I. The Integration of Collaborative Robot Systems and Their Environmental Impacts. Processes 2020, 8, 494. [Google Scholar] [CrossRef] [Green Version]
- Cruz, H.; Eckert, M.; Meneses, J.; Martínez, J.-F. Efficient Forest Fire Detection Index for Application in Unmanned Aerial Systems (UASs). Sensors 2016, 16, 893. [Google Scholar] [CrossRef] [Green Version]
- Sousa, M.J.; Moutinho, A.; Almeida, M. Thermal Infrared Sensing for Near Real-Time Data-Driven Fire Detection and Monitoring Systems. Sensors 2020, 20, 6803. [Google Scholar] [CrossRef]
- Kwet, C.; Lam, Y.; Man, L.; Koonjul, Y.; Nagowah, L. A low cost autonomous unmanned ground vehicle. Future Comput. Inform. J. 2018, 3, 304–320. [Google Scholar]
- Muppidi, S. Development of a Low Cost Controller and Navigation System for Unmanned Ground Vehicle. Master’s Thesis, West Virginia University, Morgantown, West Virginia, 2008. [Google Scholar] [CrossRef]
- Patle, B.K.; Ganesh-Babu, L.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Väljaots, E.; Sell, R.; Kaeeli, M. Motion and Energy Efficiency Parameters of Unmanned Ground Vehicle. Solid State Phenom. 2015, 220–221, 934–939. [Google Scholar]
- Sevinchan, E. Investigation of Thermal Management Options for Robots. Ph.D. Thesis, University of Ontario Institute of Technology, Oshawa, ON, Canada, 2018. [Google Scholar]
- Szrek, J.; Zimroz, R.; Wodecki, J.; Michalak, A.; Góralczyk, M.; Worsa-Kozak, M. Application of the Infrared Thermography and Unmanned Ground Vehicle for Rescue Action Support in Underground Mine—The AMICOS Project. Remote Sens. 2021, 13, 69. [Google Scholar] [CrossRef]
- Ștefan, A.; Ștefan, A.; Constantin, D.; Mateescu, C.; Cartal, L.A. Aspects of kinematics and dynamics for Payload UAVs. In Proceedings of the 7th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Bucharest, Romania, 25–27 June 2015; pp. WF1–WF4. [Google Scholar]
- Wong, J.Y. Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and Design, 2nd ed.; Butterworth-Heinemann Elsevier Ltd.: Oxford, UK, 2009; p. 488. [Google Scholar]
- Ciobotaru, T. Semi-Empiric Algorithm for Assessment of the Vehicle Mobility. Leonardo Electron. J. Pract. Technol. 2009, 8, 19–30. [Google Scholar]
- Alexa, O.; Coropețchi, I.; Vasile, A.; Oncioiu, I.; Grigore, L.Ș. Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle. Sensors 2020, 20, 5587. [Google Scholar] [CrossRef]
- Ott, C.W.; Adhikari, B.; Alexander, S.P.; Hodza, P.; Xu, C.; Minckley, T.A. Predicting Fire Propagation across Heterogeneous Landscapes Using WyoFire: A Monte Carlo-Driven Wildfire Model. Fire 2020, 3, 71. [Google Scholar] [CrossRef]
- Cicione, A.; Gibson, L.; Wade, C.; Spearpoint, M.; Walls, R.; Rush, D. Towards the Development of a Probabilistic Approach to Informal Settlement Fire Spread Using Ignition Modelling and Spatial Metrics. Fire 2020, 3, 67. [Google Scholar] [CrossRef]
- Castro Jiménez, L.E.; Edgar, A. Martínez-García, E.A. Thermal Image Sensing Model for Robotic Planning and Search. Sensors 2016, 16, 1253. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Le, Q.X.; Dao, V.T.N.; Torero, J.L.; Maluk, C.; Bisby, L. Effects of temperature and temperature gradient on concrete performance at elevated temperatures. Adv. Struct. Eng. 2018, 21, 1223–1233. [Google Scholar] [CrossRef] [Green Version]
- IMOA—International Molybdenum Association. Stainless Steel Fire Performance & Radiant Heat Transfer. Available online: https://www.imoa.info/molybdenum-uses/molybdenum-grade-stainless-steels/architecture/fire-resistance.php (accessed on 13 January 2021).
- Li, S.; Feng, C.; Niu, Y.; Shi, L.; Wu, Z.; Song, H. Reconnaissance Robot Based on SLAM Position, Thermal Imaging Technologies, and AR Display. Sensors 2019, 19, 5036. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, N.; Rohilla, Y. Flame Sensor Based Atunomous Firefighting Robot. In Proceedings of the Fifth International Conference on Microelectronics, Computing and Communication Systems, Proceeding of the Fifth International Conference on Microelectronics, Computing and Communication Systems (MCCS-2020), Ranchi, India, 21–22 October 2020; Springer Nature Singapore Pte Ltd.: Singapore, Singapore, 2021; Volume 748, pp. 641–655. [Google Scholar] [CrossRef]
- Brucker, K.A.; Majdalani, J. Effective thermal conductivity of common geometric shapes. Int. J. Heat Mass Transf. 2005, 48, 4779–4796. [Google Scholar] [CrossRef]
- Ryzhenkov, A.V.; Pogorelov, S.I.; Loginova, N.A.; Mednikov, A.F.; Tkhabisimov, A.B. Radiant heat transfer reduction methods in heat insulation of power equipment. WIT Trans. Eng. Sci. 2016, 106, 107–114. [Google Scholar]
- Tahmasbi, V.; Noori, S. Thermal Analysis of Honeycomb Sandwich Panels as Substrate of Ablative Heat Shield. J. Thermophys. Heat Transf. 2017, 32, 129–140. [Google Scholar] [CrossRef]
- SMOOTH–Smart Robots for Fighting. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5bb6ea8f9&appId=PPGMS (accessed on 14 January 2021).
- Tan, C.F.; Liew, S.M.; Alkahari, M.R.; Ranjit, S.S.S.; Said, M.R.; Chen, W.; Rauterberg, G.W.M.; Sivakumar, D. Fire Fighting Mobile Robot: State of the Art and Recent Development. Aust. J. Basic Appl. Sci. 2013, 7, 220–230. [Google Scholar]
- Liu, P.; Yu, H.; Cang, S.; Vladareanu, L. Robot-Assisted Smart Firefighting and Interdisciplinary Perspectives. In Proceedings of the 22nd International Conference on Automation and Computing (ICAC), Colchester, UK, 7–8 September 2016; pp. 395–401. [Google Scholar]
- Grigore, L.Ș.; Priescu, I.; Grecu, D.L. Applied Artificial Intelligence in Fixed and Mobile Robotic Systems. Cap 4 Terrestrial Mobile Robots; AGIR: Bucharest, Romania, 2020; p. 703. ISBN 978-973-72-0767-8. [Google Scholar]
- Silk, E. Radiative Heat Transfer Analysis. In Introduction to Spacecraft Thermal Design; Cambridge Aerospace Series; Cambridge University Press: Cambridge, UK, 2020; pp. 64–113. [Google Scholar] [CrossRef]
- Leca, A.; Chiriac, F.; Pop, M.; Badea, L. Heat Transfer Processes; Technical Publishing House: Bucharest, Romania, 2000. [Google Scholar]
- Croft, D.R.; David, G. Lilley, Heat Transfer Calculations Using Finite Difference Equations; Elsevier Science & Technology: London, UK, 1977; p. 283. [Google Scholar]
- Robert, J. Moffat, Describing the uncertainties in experimental results. Exp. Therm. Fluid Sci. 1988, 1, 3–17. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Nusselt Criterion (Nu) | Conditions | |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ștefan, A.; Grigore, L.Ș.; Molder, C.; Oncioiu, I.; Vlădescu, B.; Constantin, D.; Gorgoteanu, D.; Bălașa, R.-I.; Mustață, Ș. Research on Heat Transfer through a Double-Walled Heat Shield of a Firefighting Robot. Machines 2022, 10, 942. https://doi.org/10.3390/machines10100942
Ștefan A, Grigore LȘ, Molder C, Oncioiu I, Vlădescu B, Constantin D, Gorgoteanu D, Bălașa R-I, Mustață Ș. Research on Heat Transfer through a Double-Walled Heat Shield of a Firefighting Robot. Machines. 2022; 10(10):942. https://doi.org/10.3390/machines10100942
Chicago/Turabian StyleȘtefan, Amado, Lucian Ștefăniță Grigore, Cristian Molder, Ionica Oncioiu, Bogdan Vlădescu, Daniel Constantin, Damian Gorgoteanu, Răzvan-Ionuț Bălașa, and Ștefan Mustață. 2022. "Research on Heat Transfer through a Double-Walled Heat Shield of a Firefighting Robot" Machines 10, no. 10: 942. https://doi.org/10.3390/machines10100942