
A Comprehensive Survey on Fault Tolerance in Multiphase AC Drives, Part 2: Phase and Switch Open-Circuit Faults

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Detection of Phase/Switch OC Faults
- Model-based (MB) methods: an observer using a system model is employed to identify the faults, for example, when the measured signals deviate from the ones predicted for a healthy drive. No extra hardware is required, but to obtain adequate performance, a high accuracy is necessary in the model, which is particularly difficult when the electrical parameters change with operating conditions.
- Knowledge-based (KB) methods: the fault diagnosis is attained using advanced algorithms such as neural networks, deep-learning technologies, or similar strategies, based on historic values (knowledge) from the system. Although this alternative does not require an accurate model, the computational burden is often excessive for real-time implementation.
- Signal-based (SB) methods: the symptoms that some signals exhibit under failures are exploited to diagnose the fault. For this purpose, voltage or current signals may be monitored. If the current signals are employed, the fault is identified using only sensors that commonly exist for closed-loop control. The special behavior of the monitored signals in case of faults may be indirectly excited by the active injection of certain suitable signals, which some authors define as an additional category of diagnosis techniques [288].
- (R1)
- Use of non-invasive techniques and lack of extra hardware (e.g., voltage sensors).
- (R2)
- Obtain short detection times (less than a fundamental period), so that the effects of torque ripple, vibrations, and large currents are reduced.
- (R3)
- Avoid complexity and high implementation effort.
- (R4)
- Independence from operating conditions (e.g., load value, transients, etc.).
- (R5)
- Independence from control strategy and/or machine parameters (without adding parameter observers).
2.1. MB Detection Methods
2.2. KB Detection Methods
2.3. SB Detection Methods
2.4. Concluding Remarks about Detection of Phase/Switch OC Faults
3. Control Methods for Tolerating Phase/Switch OCs
- Additional current constraints in the system, since the corresponding phase current should be zero [21].
- Coupling between the voltages and currents of different VSD subspaces [21].
3.1. VSD Transform
- to use the general n-dimensional VSD transform (see Part 1) both before and after the failure;
- to replace said transformation matrix when the fault occurs with a reduced-order one, whose dimension is decreased corresponding with the reduction in current DOFs;
- or to employ a three-phase VSD for each unit of a multi-three-phase drive, either in prefault or postfault conditions.
3.1.1. n-Dimensional VSD
3.1.2. Reduced-Order VSD
3.1.3. Multiple Three-Phase VSD
3.2. V/f Control
3.3. Direct Torque/Flux Control
- The angle of the reference stator flux is obtained as the output of a proportional integral (PI) controller, whose input is the torque error. Then, the voltage references that are necessary to yield the reference stator-flux vector are directly calculated (predicted) based on the machine model. Finally, these references are synthesized by PWM [12,13,72,85,87].
- The PWM voltage references are computed based on the reference stator flux and the machine model. Then, the pair of SVs combined in SV PWM in each sampling period to synthesize the references are selected by FCS-MPC [88].
3.3.1. DTC Based on Hysteresis and LUTs
3.3.2. DTC Based on FCS-MPC
3.3.3. DTC Based on PI and Predictive Control with PWM
3.3.4. DTC Based on FCS-MPC and PWM
3.3.5. Direct Flux Control (DFC)
3.4. RFOC Inner Current Controller
3.4.1. Current PR or d-q PI Control
3.4.1.1. Current - PI Control without x-y Control Using Full-Order VSD
3.4.1.2. Multiple l-Phase Current d-q PI Control
3.4.1.3. Current - PI Control Using Reduced-Order VSD
3.4.1.4. Current Dual-PI or PR Control Using Full-Order VSD
3.4.1.5. Current d-q PI Control per Plane Using Full-Order VSD
3.4.1.6. Current - PI and x-y Stationary PI Control Using Full-Order VSD
3.4.1.7. Current Per-Phase PI or PR Control
3.4.2. Current FCS-MPC
3.4.3. Current Deadbeat Control
3.4.4. Current Hysteresis Control
3.4.5. Current Sliding-Mode Control
3.4.6. Current Fuzzy-Logic Control
3.5. RFOC Generation of Current References
3.5.1. Sinusoidally Distributed Windings
3.5.1.1. Definition of Thresholds for Overheating Prevention
- (T1)
- (T2)
- (T3)
3.5.1.2. Definition of DF Based on - Current Modulus
3.5.1.3. Current References in Secondary VSD Subspaces
3.5.1.4. Selection of Ratio
3.5.2. Consideration of Space Harmonics
3.5.3. Methods Based on Adaptive Outer Control Loop
3.6. Control with Reconfigurationless Tolerance to Phase OCs
3.7. Concluding Remarks about Control Methods for Tolerating Phase/Switch OCs
4. Drive Topologies for Improving Tolerance to Phase/Switch OCs
4.1. Performance under Phase/Switch OCs for Different Types of Drives (No Reconfiguration)
4.1.1. Postfault Performance for Different Neutral Configurations
4.1.2. Postfault Performance for Different Stator WSAs
4.1.3. Postfault Performance for Different Stator Phase Connections
4.1.4. Postfault Performance for Different VSC Topologies
4.2. Performance Improvement under Phase/Switch OCs by Drive Reconfiguration
4.2.1. Replacement of Faulty Legs by Redundant Ones
4.2.2. Connection of Stator Neutral Point(s) to DC-Link Midpoint
4.2.3. Connection of Stator Neutral Point(s) to VSC Leg(s)
4.2.4. Switch between One or Several Neutral Points
4.2.5. Combined Rearrangement of Neutral Points and Neutral Connections to VSC Legs
4.2.6. Switch between Single n-Leg FB and Dual n-Leg HB VSCs
4.2.7. Switch between Phases Open or Clamped to DC-Link Midpoint
4.2.8. Sharing a VSC Leg between Two Phases
4.2.9. Switch Types of Stator Phase Connections
4.2.10. Switch Order of VSC-Machine Connections
4.3. Concluding Remarks about Drive Topologies for Improving Tolerance to Phase/Switch OCs
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 1N | One stator neutral point |
| 2N | Two stator neutral points |
| DF | Derating factor |
| DFC | Direct flux control |
| DOF | Degree of freedom |
| DTC | Direct torque control |
| EMF | Electromotive force |
| FB | Full-bridge |
| FCS-MPC | Finite-control-set model predictive control |
| FF | Feed-forward |
| FRMLS | Full-range minimum loss strategy |
| FSCW | Fractional-slot concentrated winding |
| HB | Half-bridge |
| IGBT | Insulated-gate bipolar transistor |
| IM | Induction machine |
| IPMSM | Interior permanent-magnet synchronous machine |
| KB | Knowledge-based |
| LUT | Look-up table |
| MB | Model-based |
| MLS | Minimum loss strategy |
| MPC | Model predictive control |
| MTS | Maximum torque strategy |
| NPC | Neutral-point-clamped |
| OC | Open circuit |
| PI | Proportional integral |
| PMaSynRM | Permanent-magnet-assisted synchronous reluctance machine |
| PMSM | Permanent-magnet synchronous machine |
| PR | Proportional resonant |
| PWM | Pulsewidth modulation |
| RFNCMAN | Recurrent fuzzy neural cerebellar model articulation network |
| RFOC | Rotor-field-oriented control |
| SB | Signal-based |
| SC | Short circuit |
| SCL | Stator copper loss |
| SPMSM | Surface-mounted permanent-magnet synchronous machine |
| SV | Space vector |
| SynRM | Synchronous reluctance machine |
| THD | Total harmonic distortion |
| TSKFNN-AMF | Takagi–Sugeno–Kang fuzzy neural network with asymmetric membership function |
| VSC | Voltage source converter |
| VSD | Vector space decomposition |
| WSA | Winding spatial arrangement |
References
- Bennett, J.W.; Atkinson, G.J.; Mecrow, B.C.; Atkinson, D.J. Fault-tolerant design considerations and control strategies for aerospace drives. IEEE Trans. Ind. Electron. 2012, 59, 2049–2058. [Google Scholar] [CrossRef]
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of electric motor technologies used for more electric aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar] [CrossRef]
- Subotic, I.; Bodo, N.; Levi, E.; Jones, M. Onboard integrated battery charger for EVs using an asymmetrical nine-phase machine. IEEE Trans. Ind. Electron. 2015, 62, 3285–3295. [Google Scholar] [CrossRef]
- Bodo, N.; Levi, E.; Subotic, I.; Espina, J.; Empringham, L.; Johnson, C.M. Efficiency evaluation of fully integrated on-board EV battery chargers with nine-phase machines. IEEE Trans. Energy Convers. 2017, 32, 257–266. [Google Scholar] [CrossRef]
- Abdel-Majeed, M.S.; Eldeeb, H.M.; Metwly, M.Y.; Abdel-Khalik, A.S.; Hamad, M.S.; Hamdy, R.A.; Ahmed, S. Postfault operation of onboard integrated battery charger via a nine-phase EV-drive train. IEEE Trans. Ind. Electron. 2021, 68, 5626–5637. [Google Scholar] [CrossRef]
- Duran, M.; Barrero, F. Recent advances in the design, modeling and control of multiphase machines–Part 2. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Zarri, L.; Mengoni, M.; Gritli, Y.; Tani, A.; Filippetti, F.; Serra, G.; Casadei, D. Detection and localization of stator resistance dissymmetry based on multiple reference frame controllers in multiphase induction motor drives. IEEE Trans. Ind. Electron. 2013, 60, 3506–3518. [Google Scholar] [CrossRef]
- Kumar, S.; Mukherjee, D.; Guchhait, P.K.; Banerjee, R.; Srivastava, A.K.; Vishwakarma, D.N.; Saket, R.K. A comprehensive review of condition based prognostic maintenance (CBPM) for induction motor. IEEE Access 2019, 7, 90690–90704. [Google Scholar] [CrossRef]
- Guzman, H.; Barrero, F.; Duran, M.J. IGBT-gating failure effect on a fault-tolerant predictive current-controlled five-phase induction motor drive. IEEE Trans. Ind. Electron. 2015, 62, 15–20. [Google Scholar] [CrossRef] [Green Version]
- Lu, B.; Sharma, S.K. A literature review of IGBT fault diagnostic and protection methods for power inverters. IEEE Trans. Ind. Appl. 2009, 45, 1770–1777. [Google Scholar] [CrossRef]
- Tan, Y.; Zhang, H.; Zhou, Y. Fault detection method for permanent magnet synchronous generator wind energy converters using correlation features among three-phase currents. J. Mod. Power Syst. Clean Energy 2020, 8, 168–178. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Cheng, M.; Hu, Y. Remedial strategies of T-NPC three-level asymmetric six-phase PMSM drives based on SVM-DTC. IEEE Trans. Ind. Electron. 2017, 64, 6841–6853. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wang, X.; Cheng, M.; Hu, Y. Comprehensive investigation on remedial operation of switch faults for dual three-phase PMSM drives fed by T-3L inverters. IEEE Trans. Ind. Electron. 2018, 65, 4574–4587. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Gu, M.; Xu, Z.; Zou, Z.; Wang, W.; Cheng, M. Fault-tolerant control of common electrical faults in dual three-phase PMSM drives fed by T-type three-level inverters. IEEE Trans. Ind. Appl. 2021, 57, 481–491. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; He, J.; Zhao, W. Diagnosis and tolerance of common electrical faults in T-type three-level inverters fed dual three-phase PMSM drives. IEEE Trans. Power Electron. 2020, 35, 1753–1769. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; Wang, W.; Wang, B.; Zou, Z. Deadbeat predictive current control-based fault-tolerant scheme for dual three-phase PMSM drives. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1591–1604. [Google Scholar] [CrossRef]
- Sun, J.; Zheng, Z.; Li, C.; Wang, K.; Li, Y. Optimal fault-tolerant control of multiphase drives under open-phase/open-switch faults based on dc current injection. IEEE Trans. Power Electron. 2022, 37, 5928–5936. [Google Scholar] [CrossRef]
- Guo, H.; Guo, S.; Xu, J.; Tian, X. Power switch open-circuit fault diagnosis of six-phase fault tolerant permanent magnet synchronous motor system under normal and fault-tolerant operation conditions using the average current Park’s vector approach. IEEE Trans. Power Electron. 2021, 36, 2641–2660. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, A.; Aciego, J.J.; Gonzalez-Prieto, I.; Duran, M.J. Automatic fault-tolerant control of multiphase induction machines: A game changer. Electronics 2020, 9, 938. [Google Scholar] [CrossRef]
- Munim, W.N.W.A.; Duran, M.J.; Che, H.S.; Bermúdez, M.; Gonzalez-Prieto, I.; Rahim, N.A. A unified analysis of the fault tolerance capability in six-phase induction motor drives. IEEE Trans. Power Electron. 2017, 32, 7824–7836. [Google Scholar] [CrossRef]
- Che, H.S.; Duran, M.J.; Levi, E.; Jones, M.; Hew, W.P.; Abd Rahim, N. Postfault operation of an asymmetrical six-phase induction machine with single and two isolated neutral points. IEEE Trans. Power Electron. 2014, 29, 5406–5416. [Google Scholar] [CrossRef] [Green Version]
- Yepes, A.G.; Doval-Gandoy, J.; Baneira, F.; Toliyat, H. Comparison of stator winding connections in multiphase drives under healthy operation and with one open converter leg. IET Electric Power Appl. 2020, 14, 584–596. [Google Scholar] [CrossRef]
- Yepes, A.G.; Doval-Gandoy, J. Study and active enhancement by converter reconfiguration of the performance in terms of stator copper loss, derating factor and converter rating of multiphase drives under two open legs with different stator winding connections. IEEE Access 2021, 9, 63356–63376. [Google Scholar] [CrossRef]
- Yepes, A.G.; Doval-Gandoy, J.; Toliyat, H.A. Strategy with smooth transitions and improved torque-speed region and stator copper loss for two-level asymmetrical six-phase induction motor drives under switch faults. IEEE Trans. Power Electron. 2021, 36, 1954–1969. [Google Scholar] [CrossRef]
- Eldeeb, H.M.; Abdel-Khalik, A.S.; Hackl, C.M. Postfault full torque-speed exploitation of dual three-phase IPMSM drives. IEEE Trans. Ind. Electron. 2019, 66, 6746–6756. [Google Scholar] [CrossRef]
- Mecrow, B.C.; Jack, A.G.; Atkinson, D.J.; Green, S.R.; Atkinson, G.J.; King, A.; Green, B. Design and testing of a four-phase fault-tolerant permanent-magnet machine for an engine fuel pump. IEEE Trans. Energy Convers. 2004, 19, 671–678. [Google Scholar] [CrossRef]
- Scuiller, F.; Charpentier, J.; Semail, E. Multi-star multi-phase winding for a high power naval propulsion machine with low ripple torques and high fault tolerant ability. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference 2010, Lille, France, 1–3 September 2010; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Liu, G.; Zhao, W.; Sun, L.; Shao, M.; Liu, Z. Design and comparison of two fault-tolerant interior-permanent-magnet motors. IEEE Trans. Ind. Electron. 2014, 61, 6615–6623. [Google Scholar] [CrossRef]
- Zhang, L.; Fan, Y.; Li, C.; Liu, C. Design and analysis of a new six-phase fault-tolerant hybrid-excitation motor for electric vehicles. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Chen, H.; Liu, X.; Zhao, J.; Demerdash, N.A.O. Magnetic-coupling characteristics investigation of a dual-rotor fault-tolerant PMSM. IEEE Trans. Energy Convers. 2018, 33, 362–372. [Google Scholar] [CrossRef]
- Wang, B.; Wang, J.; Sen, B.; Griffo, A.; Sun, Z.; Chong, E. A fault-tolerant machine drive based on permanent magnet-assisted synchronous reluctance machine. IEEE Trans. Ind. Appl. 2018, 54, 1349–1359. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Choi, S.; Baek, J. Design optimization with multiphysics analysis on external rotor permanent magnet-assisted synchronous reluctance motors. IEEE Trans. Energy Convers. 2018, 33, 290–298. [Google Scholar] [CrossRef]
- Gonçalves, P.F.; Cruz, S.M.; Mendes, A.M. Design of a six-phase asymmetrical permanent magnet synchronous generator for wind energy applications. J. Eng. Technol. 2019, 2019, 4532–4536. [Google Scholar] [CrossRef]
- Wang, B.; Hu, J.; Hua, W. Design process of a triple redundant fault tolerant PMA SynRM. IEEE Access 2019, 7, 76241–76249. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, M.; Tang, L.; Xu, W.; Islam, M.R. Fault-tolerant analysis and design of AFPMSM with multi-disc type coreless open-end winding. IEEE Access 2020, 8, 171744–171753. [Google Scholar] [CrossRef]
- Wang, K.; Lin, H. A novel 24-slot/10-pole dual three-phase fractional-slot overlapped winding for low non-working space harmonics and stator modularization. IEEE Access 2020, 8, 85490–85503. [Google Scholar] [CrossRef]
- Shi, Z.; Sun, X.; Cai, Y.; Yang, Z. Robust design optimization of a five-phase PM hub motor for fault-tolerant operation based on Taguchi method. IEEE Trans. Energy Convers. 2020, 35, 2036–2044. [Google Scholar] [CrossRef]
- Wang, B.; Vakil, G.; Liu, Y.; Yang, T.; Zhang, Z.; Gerada, C. Optimization and analysis of a high power density and fault tolerant starter–generator for aircraft application. Energies 2021, 14, 113. [Google Scholar] [CrossRef]
- Shata, A.M.; Abdel-Khalik, A.S.; Hamdy, R.A.; Mostafa, M.Z.; Ahmed, S. Improved mathematical modeling of six phase induction machines based on fractional calculus. IEEE Access 2021, 9, 53146–53155. [Google Scholar] [CrossRef]
- Tursini, M.; Villani, M.; Di Tullio, A.; Fabri, G.; Collazzo, F.P. Nonlinear model suitable for the offline cosimulation of fault-tolerant PM motors drives. IEEE Trans. Ind. Appl. 2017, 53, 3719–3729. [Google Scholar] [CrossRef]
- Boglietti, A.; Bojoi, I.R.; Rubino, S.; Cossale, M. Overload capability of multiphase machines under normal and open-phase fault conditions: A thermal analysis approach. IEEE Trans. Ind. Appl. 2020, 56, 2560–2569. [Google Scholar] [CrossRef]
- Zhang, H.; Giangrande, P.; Sala, G.; Xu, Z.; Hua, W.; Madonna, V.; Gerada, D.; Gerada, C. Thermal model approach to multisector three-phase electrical machines. IEEE Trans. Ind. Electron. 2021, 68, 2919–2930. [Google Scholar] [CrossRef]
- Salehifar, M.; Arashloo, R.S.; Moreno-Equilaz, J.M.; Sala, V.; Romeral, L. Fault detection and fault tolerant operation of a five phase PM motor drive using adaptive model identification approach. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 212–223. [Google Scholar] [CrossRef]
- Gonçalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Online diagnostic method for the detection of high-resistance connections and open-phase faults in six-phase PMSM drives. IEEE Trans. Ind. Appl. 2022, 58, 345–355. [Google Scholar] [CrossRef]
- Torabi, N.; Sundaram, V.M.; Toliyat, H.A. On-line fault diagnosis of multi-phase drives using self-recurrent wavelet neural networks with adaptive learning rates. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 570–577. [Google Scholar] [CrossRef]
- Torabi, N.; Naghavi, F.; Toliyat, H.A. Real-time fault isolation in multiphase multilevel NPC converters using active semi-supervised fuzzy clustering algorithm with pairwise constraints. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017. [Google Scholar] [CrossRef]
- Yao, G.; Pang, S.; Ying, T.; Benbouzid, M.; Ait-Ahmed, M.; Benkhoris, M.F. VPSO-SVM-based open-circuit faults diagnosis of five-phase marine current generator sets. Energies 2020, 13, 6004. [Google Scholar] [CrossRef]
- Meinguet, F.; Sandulescu, P.; Aslan, B.; Lu, L.; Nguyen, N.; Kestelyn, X.; Semail, E. A signal-based technique for fault detection and isolation of inverter faults in multi-phase drives. In Proceedings of the 2012 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Bengaluru, India, 16–19 December 2012; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Pantea, A.; Yazidi, A.; Betin, F.; Taherzadeh, M.; Carrière, S.; Henao, H.; Capolino, G. Six-phase induction machine model for electrical fault simulation using the circuit-oriented method. IEEE Trans. Ind. Electron. 2016, 63, 494–503. [Google Scholar] [CrossRef]
- Pantea, A.; Yazidi, A.; Betin, F.; Carrière, S.; Sivert, A.; Vacossin, B.; Henao, H.; Capolino, G. Fault-tolerant control of a low-speed six-phase induction generator for wind turbines. IEEE Trans. Ind. Appl. 2019, 55, 426–436. [Google Scholar] [CrossRef]
- Mesai-Ahmed, H.; Jlassi, I.; Marques Cardoso, A.J.; Bentaallah, A. Multiple open-circuit faults diagnosis in six-phase induction motor drives, using stator current analysis. IEEE Trans. Power Electron. 2022, 37, 7275–7285. [Google Scholar] [CrossRef]
- Wen, Z.; Valente, G.; Formentini, A.; Papini, L.; Gerada, C.; Zanchetta, P. Open-circuit fault control techniques for bearingless multisector permanent magnet synchronous machines. IEEE Trans. Ind. Appl. 2021, 57, 2527–2536. [Google Scholar] [CrossRef]
- Meinguet, F.; Semail, E.; Gyselinck, J. An on-line method for stator fault detection in multi-phase PMSM drives. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Duran, M.J.; Gonzalez-Prieto, I.; Rios-Garcia, N.; Barrero, F. A simple, fast, and robust open-phase fault detection technique for six-phase induction motor drives. IEEE Trans. Power Electron. 2018, 33, 547–557. [Google Scholar] [CrossRef]
- Kong, J.; Wang, K.; Zhang, J.; Zhang, H. Multiple open-switch fault diagnosis for five-phase permanent magnet machine utilizing currents in stationary reference frame. IEEE Trans. Energy Convers. 2021, 36, 314–324. [Google Scholar] [CrossRef]
- Farag, K.; Shawier, A.; Abdel-Khalik, A.S.; Ahmed, M.M.; Ahmed, S. Applicability analysis of indices-based fault detection technique of six-phase induction motor. Energies 2021, 14, 5905. [Google Scholar] [CrossRef]
- Arafat, A.; Choi, S.; Baek, J. Open-phase fault detection of a five-phase permanent magnet assisted synchronous reluctance motor based on symmetrical components theory. IEEE Trans. Ind. Electron. 2017, 64, 6465–6474. [Google Scholar] [CrossRef]
- Chen, H.; He, J.; Demerdash, N.A.O.; Guan, X.; Lee, C.H.T. Diagnosis of open-phase faults for a five-phase PMSM fed by a closed-loop vector-controlled drive based on magnetic field pendulous oscillation technique. IEEE Trans. Ind. Electron. 2021, 68, 5582–5593. [Google Scholar] [CrossRef]
- Trabelsi, M.; Nguyen, N.K.; Semail, E. Real-time switches fault diagnosis based on typical operating characteristics of five-phase permanent-magnetic synchronous machines. IEEE Trans. Ind. Electron. 2016, 63, 4683–4694. [Google Scholar] [CrossRef] [Green Version]
- Trabelsi, M.; Semail, E.; Nguyen, N.K. Experimental investigation of inverter open-circuit fault diagnosis for biharmonic five-phase permanent magnet drive. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 339–351. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Open-phase fault diagnosis in six-phase PMSM drives based on the harmonics of the measured secondary subspace currents. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 4863–4868. [Google Scholar] [CrossRef]
- Gonçalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Diagnosis of open-phase faults and high resistance connections in six-phase PMSM drives. In Proceedings of the 2020 International Conference on Smart Energy Systems and Technologies (SEST), Istanbul, Turkey, 7–9 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Salehifar, M.; Salehi Arashloo, R.; Moreno-Eguilaz, M.; Sala, V.; Romeral, L. Observer-based open transistor fault diagnosis and fault-tolerant control of five-phase permanent magnet motor drive for application in electric vehicles. IET Power Electron. 2015, 8, 76–87. [Google Scholar] [CrossRef]
- Salehifar, M.; Moreno-Eguilaz, M.; Putrus, G.; Barras, P. Simplified fault tolerant finite control set model predictive control of a five-phase inverter supplying BLDC motor in electric vehicle drive. Electr. Power Syst. Res. 2016, 132, 56–66. [Google Scholar] [CrossRef] [Green Version]
- Salehifar, M.; Moreno-Eguilaz, M. Fault diagnosis and fault-tolerant finite control set-model predictive control of a multiphase voltage-source inverter supplying BLDC motor. ISA Trans. 2016, 60, 143–155. [Google Scholar] [CrossRef] [Green Version]
- Olivieri, C. A fault-adaptive and observer-based sensorless strategy for a fault-tolerant five-phase BLDC motor. In Proceedings of the 2013 IEEE International Symposium on Sensorless Control for Electrical Drives and Predictive Control of Electrical Drives and Power Electronics (SLED/PRECEDE), Munich, Germany, 17–19 October 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Lin, F.; Hung, Y.; Hwang, J.; Tsai, M. Fault-tolerant control of a six-phase motor drive system using a Takagi–Sugeno–Kang type fuzzy neural network with asymmetric membership function. IEEE Trans. Power Electron. 2013, 28, 3557–3572. [Google Scholar] [CrossRef]
- Lin, F.; Hung, Y.; Tsai, M. Fault-tolerant control for six-phase PMSM drive system via intelligent complementary sliding-mode control using TSKFNN-AMF. IEEE Trans. Ind. Electron. 2013, 60, 5747–5762. [Google Scholar] [CrossRef]
- Lin, F.; Sun, I.; Yang, K.; Chang, J. Recurrent fuzzy neural cerebellar model articulation network fault-tolerant control of six-phase permanent magnet synchronous motor position servo drive. IEEE Trans. Fuzzy Syst. 2016, 24, 153–167. [Google Scholar] [CrossRef]
- Jiang, X.; Huang, W.; Cao, R.; Hao, Z.; Jiang, W. Electric drive system of dual-winding fault-tolerant permanent-magnet motor for aerospace applications. IEEE Trans. Ind. Electron. 2015, 62, 7322–7330. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Rios-Garcia, N.; Barrero, F.; Martín, C. Open-switch fault detection in five-phase induction motor drives using model predictive control. IEEE Trans. Ind. Electron. 2018, 65, 3045–3055. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Wang, W.; Hu, Y. Comprehensive diagnosis and tolerance strategies for electrical faults and sensor faults in dual three-phase PMSM drives. IEEE Trans. Power Electron. 2019, 34, 6669–6684. [Google Scholar] [CrossRef]
- Garcia-Entrambasaguas, P.; Gonzalez-Prieto, I.; Duran, M.J. Single-index open-phase fault detection method for six-phase electric drives. IEEE Trans. Ind. Electron. 2020, 67, 10233–10242. [Google Scholar] [CrossRef]
- Salas-Biedma, P.; Gonzalez-Prieto, I.; Duran, M.J.; Bermudez, M.; Barrero, F. Multiphase current imbalance localisation method applied to natural fault-tolerant strategies. IET Electric Power Appl. 2020, 14, 1421–1429. [Google Scholar] [CrossRef]
- dos Santos Moraes, T.J.; Trabelsi, M.; Nguyen, N.K.; Semail, E.; Meinguet, F.; Guerin, M. Inverter open circuit faults diagnosis in series-connected six-phases permanent magnet drive. In Proceedings of the 2017 IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 188–194. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Khalik, A.S.; Hamdy, R.A.; Massoud, A.M.; Ahmed, S. Postfault control of scalar (V/f) controlled asymmetrical six-phase induction machines. IEEE Access 2018, 6, 59211–59220. [Google Scholar] [CrossRef]
- Paredes, J.; Prieto, B.; Satrústegui, M.; Elósegui, I.; Gonzalez, P. Improving the performance of a 1-MW induction machine by optimally shifting from a three-phase to a six-phase machine design by rearranging the coil connections. IEEE Trans. Ind. Electron. 2021, 68, 1035–1045. [Google Scholar] [CrossRef]
- Zhou, Y.; Lin, X.; Cheng, M. A fault-tolerant direct torque control for six-phase permanent magnet synchronous motor with arbitrary two opened phases based on modified variables. IEEE Trans. Energy Convers. 2016, 31, 549–556. [Google Scholar] [CrossRef]
- Bermudez, M.; Gonzalez-Prieto, I.; Barrero, F.; Guzman, H.; Duran, M.J.; Kestelyn, X. Open-phase fault-tolerant direct torque control technique for five-phase induction motor drives. IEEE Trans. Ind. Electron. 2017, 64, 902–911. [Google Scholar] [CrossRef] [Green Version]
- Bermudez, M.; Gonzalez-Prieto, I.; Barrero, F.; Guzman, H.; Kestelyn, X.; Duran, M.J. An experimental assessment of open-phase fault-tolerant virtual-vector-based direct torque control in five-phase induction motor drives. IEEE Trans. Power Electron. 2018, 33, 2774–2784. [Google Scholar] [CrossRef] [Green Version]
- Mossa, M.A.; Echeikh, H.; Diab, A.A.Z.; Haes Alhelou, H.; Siano, P. Comparative study of hysteresis controller, resonant controller and direct torque control of five-phase IM under open-phase fault operation. Energies 2021, 14, 1317. [Google Scholar] [CrossRef]
- Chikondra, B.; Muduli, U.R.; Behera, R.K. An improved open-phase fault-tolerant DTC technique for five-phase induction motor drive based on virtual vectors assessment. IEEE Trans. Ind. Electron. 2021, 68, 4598–4609. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, J.; Chen, C.; Tian, X.; Liu, G. Disturbance-observer-based direct torque control of five-phase permanent magnet motor under open-circuit and short-circuit faults. IEEE Trans. Ind. Electron. 2021, 68, 11907–11917. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, G. Predictive DTC strategy with fault-tolerant function for six-phase and three-phase PMSM series-connected drive system. IEEE Trans. Ind. Electron. 2018, 65, 9101–9112. [Google Scholar] [CrossRef]
- Zhang, L.; Fan, Y.; Cui, R.; Lorenz, R.D.; Cheng, M. Fault-tolerant direct torque control of five-phase FTFSCW-IPM motor based on analogous three-phase SVPWM for electric vehicle applications. IEEE Trans. Veh. Technol. 2018, 67, 910–919. [Google Scholar] [CrossRef]
- Huang, W.; Hua, W.; Chen, F.; Zhu, J. Enhanced model predictive torque control of fault-tolerant five-phase permanent magnet synchronous motor with harmonic restraint and voltage preselection. IEEE Trans. Ind. Electron. 2020, 67, 6259–6269. [Google Scholar] [CrossRef]
- Zhou, H.; Zhou, C.; Tao, W.; Wang, J.; Liu, G. Virtual-stator-flux-based direct torque control of five-phase fault-tolerant permanent-magnet motor with open-circuit fault. IEEE Trans. Power Electron. 2020, 35, 5007–5017. [Google Scholar] [CrossRef]
- Huang, W.; Hua, W.; Chen, F.; Hu, M.; Zhu, J. Model predictive torque control with SVM for five-phase PMSM under open-circuit fault condition. IEEE Trans. Power Electron. 2020, 35, 5531–5540. [Google Scholar] [CrossRef]
- Che, H.S.; Tousizadeh, M.; Duran, M.J.; Munim, W.N.W.; Rahim, N.A. Fault-tolerant symmetrical six-phase induction motor drive based on feed-forward voltage compensation. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 6212–6216. [Google Scholar] [CrossRef]
- Liu, G.; Qu, L.; Zhao, W.; Chen, Q.; Xie, Y. Comparison of two SVPWM control strategies of five-phase fault-tolerant permanent-magnet motor. IEEE Trans. Power Electron. 2016, 31, 6621–6630. [Google Scholar] [CrossRef]
- Bojoi, R.; Cavagnino, A.; Tenconi, A.; Vaschetto, S. Control of shaft-line-embedded multiphase starter/generator for aero-engine. IEEE Trans. Ind. Electron. 2016, 63, 641–652. [Google Scholar] [CrossRef]
- Rubino, S.; Bojoi, R.; Odhano, S.A.; Zanchetta, P. Model predictive direct flux vector control of multi-three-phase induction motor drives. IEEE Trans. Ind. Appl. 2018, 54, 4394–4404. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, G.; Zhao, W.; Qu, L.; Xu, G. Asymmetrical SVPWM fault-tolerant control of five-phase PM brushless motors. IEEE Trans. Energy Convers. 2017, 32, 12–22. [Google Scholar] [CrossRef]
- Patel, V.I.; Wang, J.; Nugraha, D.T.; Vuletić, R.; Tousen, J. Enhanced availability of drivetrain through novel multiphase permanent-magnet machine drive. IEEE Trans. Ind. Electron. 2016, 63, 469–480. [Google Scholar] [CrossRef]
- Barcaro, M.; Faggion, A.; Bianchi, N.; Bolognani, S. Sensorless rotor position detection capability of a dual three-phase fractional-slot IPM machine. IEEE Trans. Ind. Appl. 2012, 48, 2068–2078. [Google Scholar] [CrossRef]
- Jung, E.; Yoo, H.; Sul, S.K.; Choi, H.S.; Choi, Y.Y. A nine-phase permanent-magnet motor drive system for an ultrahigh-speed elevator. IEEE Trans. Ind. Appl. 2012, 48, 987–995. [Google Scholar] [CrossRef]
- Rubino, S.; Dordevic, O.; Bojoi, R.; Levi, E. Modular vector control of multi-three-phase permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 2021, 68, 9136–9147. [Google Scholar] [CrossRef]
- Kong, W.; Huang, J.; Li, B.; Zhao, L. Sensorless vector control of five-phase induction motor under open-phases fault. Electr. Power Compon. Syst. 2014, 42, 1039–1047. [Google Scholar] [CrossRef]
- Shamsi-Nejad, M.; Nahid-Mobarakeh, B.; Pierfederici, S.; Meibody-Tabar, F. Fault tolerant and minimum loss control of double-star synchronous machines under open phase conditions. IEEE Trans. Ind. Electron. 2008, 55, 1956–1965. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, J.; Cheng, M.; Li, S. Fault-tolerant control of dual three-phase permanent-magnet synchronous machine drives under open-phase faults. IEEE Trans. Power Electron. 2017, 32, 2052–2063. [Google Scholar] [CrossRef]
- Wang, B.; Wang, J.; Griffo, A.; Sen, B. A general modeling technique for a triple redundant 3×3-phase PMA SynRM. IEEE Trans. Ind. Electron. 2018, 65, 9068–9078. [Google Scholar] [CrossRef] [Green Version]
- de Souza, T.S.; Bastos, R.R.; Cardoso Filho, B.J. Synchronous-frame modeling and dq current control of an unbalanced nine-phase induction motor due to open phases. IEEE Trans. Ind. Appl. 2020, 56, 2097–2106. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, W.; Liu, G.; Cheng, R.; Xie, Y. Remedial field-oriented control of five-phase fault-tolerant permanent-magnet motor by using reduced-order transformation matrices. IEEE Trans. Ind. Electron. 2017, 64, 169–178. [Google Scholar] [CrossRef]
- Chen, C.; Zhou, H.; Wang, G.; Liu, G. Unified decoupling vector control of five-phase permanent-magnet motor with double-phase faults. IEEE Access 2020, 8, 152646–152658. [Google Scholar] [CrossRef]
- Tian, B.; An, Q.; Duan, J.; Sun, D.; Sun, L.; Semenov, D. Decoupled modeling and nonlinear speed control for five-phase PM motor under single-phase open fault. IEEE Trans. Power Electron. 2017, 32, 5473–5486. [Google Scholar] [CrossRef]
- Tian, B.; An, Q.; Duan, J.; Semenov, D.; Sun, D.; Sun, L. Cancellation of torque ripples with FOC strategy under two-phase failures of the five-phase PM motor. IEEE Trans. Power Electron. 2017, 32, 5459–5472. [Google Scholar] [CrossRef]
- Liu, G.; Lin, Z.; Zhao, W.; Chen, Q.; Xu, G. Third harmonic current injection in fault-tolerant five-phase permanent-magnet motor drive. IEEE Trans. Power Electron. 2018, 33, 6970–6979. [Google Scholar] [CrossRef]
- Tian, B.; Molinas, M.; An, Q. PWM investigation of a field-oriented controlled five-phase PMSM under two-phase open faults. IEEE Trans. Energy Convers. 2021, 36, 580–593. [Google Scholar] [CrossRef]
- Tian, B.; Sun, L.; Molinas, M.; An, Q.T. Repetitive control based phase voltage modulation amendment for FOC-based five-phase PMSMs under single-phase open fault. IEEE Trans. Ind. Electron. 2021, 68, 1949–1960. [Google Scholar] [CrossRef]
- Ryu, H.M.; Kim, J.W.; Sul, S.K. Synchronous-frame current control of multiphase synchronous motor under asymmetric fault condition due to open phases. IEEE Trans. Ind. Appl. 2006, 42, 1062–1070. [Google Scholar] [CrossRef]
- Priestley, M.; Farshadnia, M.; Fletcher, J.E. FOC transformation for single open-phase faults in the five-phase open-end winding topology. IEEE Trans. Ind. Electron. 2020, 67, 842–851. [Google Scholar] [CrossRef]
- Fan, Y.; Cui, R.; Zhang, A. Torque ripple minimization for inter-turn short-circuit fault based on open-winding five phase FTFSCW-IPM motor for electric vehicle application. IEEE Trans. Veh. Technol. 2020, 69, 282–292. [Google Scholar] [CrossRef]
- Xu, H.; Huang, W.; Bu, F.; Liu, H.; Lin, X. Control of five-phase dual stator-winding induction generator with an open phase. IEEE Trans. Ind. Electron. 2019, 66, 696–706. [Google Scholar] [CrossRef]
- Li, W.; Feng, G.; Li, Z.; Tjong, J.; Kar, N.C. Multireference frame based open-phase fault modeling and control for asymmetrical six-phase interior permanent magnet motors. IEEE Trans. Power Electron. 2021, 36, 11712–11725. [Google Scholar] [CrossRef]
- Cheng, L.; Sui, Y.; Zheng, P.; Wang, P.; Wu, F. Implementation of postfault decoupling vector control and mitigation of current ripple for five-phase fault-tolerant PM machine under single-phase open-circuit fault. IEEE Trans. Power Electron. 2018, 33, 8623–8636. [Google Scholar] [CrossRef]
- Hu, Y.; Feng, Y.; Li, X. Fault-tolerant hybrid current control of dual three-phase PMSM with one phase open. IEEE J. Emerg. Sel. Top. Power Electron. accepted for publication. [CrossRef]
- Hu, Y.; Zhu, Z.Q.; Wu, Z.Y. Modelling and vector control of dual three-phase PMSM with one-phase open. IET Electric Power Appl. 2021, 15, 847–860. [Google Scholar] [CrossRef]
- Xiong, C.; Xu, H.; Guan, T.; Zhou, P. Fault-tolerant FOC for five-phase SPMSM with non-sinusoidal back EMF. IET Electric Power Appl. 2019, 13, 1734–1742. [Google Scholar] [CrossRef]
- Xiong, C.; Guan, T.; Zhou, P.; Xu, H. A fault-tolerant FOC strategy for five-phase SPMSM with minimum torque ripples in the full torque operation range under double-phase open-circuit fault. IEEE Trans. Ind. Electron. 2020, 67, 9059–9072. [Google Scholar] [CrossRef]
- Geng, Y.; Lai, Z.; Li, Y.; Wang, D.; Chen, R.; Zheng, P. Sensorless fault-tolerant control strategy of six-phase induction machine based on harmonic suppression and sliding mode observer. IEEE Access 2019, 7, 110086–110102. [Google Scholar] [CrossRef]
- Qiu-Liang, H.; Yong, C.; Li, X. Fault-tolerant control strategy for five-phase PMSM with third-harmonic current injection. IEEE Access 2018, 6, 58501–58509. [Google Scholar] [CrossRef]
- Vu, D.T.; Nguyen, N.K.; Semail, E. Fault-tolerant control for nonsinusoidal multiphase drives with minimum torque ripple. IEEE Trans. Power Electron. 2022, 37, 6290–6304. [Google Scholar] [CrossRef]
- Chen, Q.; Gu, L.; Lin, Z.; Liu, G. Extension of space-vector-signal-injection-based MTPA control into SVPWM fault-tolerant operation for five-phase IPMSM. IEEE Trans. Ind. Electron. 2020, 67, 7321–7333. [Google Scholar] [CrossRef]
- Chen, Q.; Zhao, W.; Liu, G.; Lin, Z. Extension of virtual-signal-injection-based MTPA control for five-phase IPMSM into fault-tolerant operation. IEEE Trans. Ind. Electron. 2019, 66, 944–955. [Google Scholar] [CrossRef]
- Shawier, A.; Abdel-Khalik, A.S.; Hamdy, R.A.; Ahmed, K.H.; Ahmed, S. Postfault operation of five-phase induction machine with minimum total losses under single open-phase fault. IEEE Access 2020, 8, 208696–208706. [Google Scholar] [CrossRef]
- Baneira, F.; Doval-Gandoy, J.; Yepes, A.G.; Lopez, O.; Pérez-Estévez, D. Comparison of postfault control strategies in terms of converter losses for dual three-phase machines. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 3612–3619. [Google Scholar] [CrossRef]
- Baneira, F.; Doval-Gandoy, J.; Yepes, A.G.; Lopez, O.; Pérez-Estévez, D. Comparison of postfault strategies for current reference generation for dual three-phase machines in terms of converter losses. IEEE Trans. Power Electron. 2017, 32, 8243–8246. [Google Scholar] [CrossRef]
- Yepes, A.G.; Doval-Gandoy, J.; Baneira, F.; Toliyat, H. Control strategy for dual three-phase machines with two open phases providing minimum loss in the full torque operation range. IEEE Trans. Power Electron. 2018, 33, 10044–10050. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Hamad, M.S.; Massoud, A.M.; Ahmed, S. Postfault operation of a nine-phase six-terminal induction machine under single open-line fault. IEEE Trans. Ind. Electron. 2018, 65, 1084–1096. [Google Scholar] [CrossRef]
- Yepes, A.G.; Doval-Gandoy, J.; Baneira, F.; Toliyat, H.A. Speed estimation based on rotor slot harmonics in multiphase induction machines under open-phase fault. IEEE Trans. Power Electron. 2018, 33, 7980–7993. [Google Scholar] [CrossRef]
- Sun, J.; Liu, Z.; Zheng, Z.; Li, Y. An online global fault-tolerant control strategy for symmetrical multiphase machines with minimum losses in full torque production range. IEEE Trans. Power Electron. 2020, 35, 2819–2830. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. Effect of dc-link voltage limitation on postfault steady-state performance of asymmetrical six-phase induction machines. IEEE Trans. Ind. Electron. 2018, 65, 6890–6900. [Google Scholar] [CrossRef]
- Tani, A.; Mengoni, M.; Zarri, L.; Serra, G.; Casadei, D. Control of multiphase induction motors with an odd number of phases under open-circuit phase faults. IEEE Trans. Power Electron. 2012, 27, 565–577. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F.; Zarri, L.; Bogado, B.; Gonzalez Prieto, I.; Arahal, M.R. Comparative study of predictive and resonant controllers in fault-tolerant five-phase induction motor drives. IEEE Trans. Ind. Electron. 2016, 63, 606–617. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Barrero, F.J. Fault-tolerant control of six-phase induction motor drives with variable current injection. IEEE Trans. Power Electron. 2017, 32, 7894–7903. [Google Scholar] [CrossRef]
- Munim, W.N.W.A.; Tousizadeh, M.; Che, H.S. Effects of zero-sequence transformations and min-max injection on fault-tolerant symmetrical six-phase drives with single isolated neutral. J. Power Electron. 2019, 19, 968–979. [Google Scholar] [CrossRef]
- Eldeeb, H.M.; Abdel-Khalik, A.S.; Kullick, J.; Hackl, C.M. Pre- and postfault current control of dual three-phase reluctance synchronous drives. IEEE Trans. Ind. Electron. 2020, 67, 3361–3373. [Google Scholar] [CrossRef]
- Liu, Z.; Sun, X.; Zheng, Z.; Jiang, D.; Li, Y. Optimized current trajectory tracking control of a five-phase induction machine under asymmetrical current limits. IEEE Trans. Power Electron. 2020, 35, 5290–5303. [Google Scholar] [CrossRef]
- Tousizadeh, M.; Che, H.S.; Abdel-Khalik, A.S.; Munim, W.N.W.A.; Selvaraj, J.; Rahim, N.A. Effects of flux derating methods on torque production of fault-tolerant polyphase induction drives. IET Electric Power Appl. 2021, 15, 616–628. [Google Scholar] [CrossRef]
- Sala, G.; Mengoni, M.; Rizzoli, G.; Degano, M.; Zarri, L.; Tani, A. Impact of star connection layouts on the control of multiphase induction motor drives under open-phase fault. IEEE Trans. Power Electron. 2021, 36, 3717–3726. [Google Scholar] [CrossRef]
- Zoric, I.; Jones, M.; Levi, E. Arbitrary power sharing among three-phase winding sets of multiphase machines. IEEE Trans. Ind. Electron. 2018, 65, 1128–1139. [Google Scholar] [CrossRef] [Green Version]
- Sala, G.; Mengoni, M.; Rizzoli, G.; Zarri, L.; Tani, A. Decoupled d–q axes current-sharing control of multi-three-phase induction machines. IEEE Trans. Ind. Electron. 2020, 67, 7124–7134. [Google Scholar] [CrossRef]
- Locment, F.; Semail, E.; Kestelyn, X. Vectorial approach-based control of a seven-phase axial flux machine designed for fault operation. IEEE Trans. Ind. Electron. 2008, 55, 3682–3691. [Google Scholar] [CrossRef] [Green Version]
- Vu, D.T.; Nguyen, N.K.; Semail, E.; dos Santos Moraes, T.J. Control strategies for non-sinusoidal multiphase PMSM drives in faulty modes under constraints on copper losses and peak phase voltage. IET Electric Power Appl. 2019, 13, 1743–1752. [Google Scholar] [CrossRef] [Green Version]
- Feng, G.; Lai, C.; Li, W.; Tjong, J.; Kar, N.C. Open-phase fault modeling and optimized fault-tolerant control of dual three-phase permanent magnet synchronous machines. IEEE Trans. Power Electron. 2019, 34, 11116–11127. [Google Scholar] [CrossRef]
- Feng, G.; Lai, C.; Li, W.; Han, Y.; Kar, N.C. Computation-efficient solution to open-phase fault tolerant control of dual three-phase interior PMSMs with maximized torque and minimized ripple. IEEE Trans. Power Electron. 2021, 36, 4488–4499. [Google Scholar] [CrossRef]
- Li, Z.; Wu, L.; Chen, Z.; Shi, Y.; Qiu, L.; Fang, Y. Single- and two-phase open-circuit fault tolerant control for dual three-phase PM motor without phase shifting. IEEE Access 2020, 8, 171945–171955. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, J.; Jewell, G.W.; Howe, D. Enhanced optimal torque control of fault-tolerant PM machine under flux-weakening operation. IEEE Trans. Ind. Electron. 2010, 57, 344–353. [Google Scholar] [CrossRef]
- Sui, Y.; Zheng, P.; Yin, Z.; Wang, M.; Wang, C. Open-circuit fault-tolerant control of five-phase PM machine based on reconfiguring maximum round magnetomotive force. IEEE Trans. Ind. Electron. 2019, 66, 48–59. [Google Scholar] [CrossRef]
- He, S.; Sui, X.; Zhou, D.; Blaabjerg, F. Zero torque ripple operation of seven-phase concentrated-full-pitch winding induction motor under open circuit faults. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 380–385. [Google Scholar] [CrossRef]
- Villani, M.; Tursini, M.; Fabri, G.; Castellini, L. High reliability permanent magnet brushless motor drive for aircraft application. IEEE Trans. Ind. Electron. 2012, 59, 2073–2081. [Google Scholar] [CrossRef]
- He, S.; Sui, X.; Liu, Z.; Kang, M.; Zhou, D.; Blaabjerg, F. Torque ripple minimization of a five-phase induction motor under open-phase faults using symmetrical components. IEEE Access 2020, 8, 114675–114691. [Google Scholar] [CrossRef]
- Sen, B.; Wang, J. Stationary frame fault-tolerant current control of polyphase permanent-magnet machines under open-circuit and short-circuit faults. IEEE Trans. Power Electron. 2016, 31, 4684–4696. [Google Scholar] [CrossRef]
- Liu, H.; Wang, D.; Yi, X.; Meng, F. Torque ripple suppression under open-phase fault conditions in a five-phase induction motor with harmonic injection. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 274–288. [Google Scholar] [CrossRef]
- Arashloo, R.S.; Martinez, J.L.R.; Salehifar, M.; Moreno-Eguilaz, M. Genetic algorithm-based output power optimisation of fault tolerant five-phase brushless direct current drives applicable for electrical and hybrid electrical vehicles. IET Electric Power Appl. 2014, 8, 267–277. [Google Scholar] [CrossRef]
- Kong, W.; Kang, M.; Li, D.; Qu, R.; Jiang, D.; Gan, C. Investigation of spatial harmonic magnetic field coupling effect on torque ripple for multiphase induction motor under open fault condition. IEEE Trans. Power Electron. 2018, 33, 6060–6071. [Google Scholar] [CrossRef]
- Harikumaran, J.; Buticchi, G.; Galea, M.; Wheeler, P. Open phase fault tolerant control of multi three phase machines. IEEE Open J. Power Electron. 2021, 2, 535–544. [Google Scholar] [CrossRef]
- Pham, H.T.; Bourgeot, J.M.; Benbouzid, M. Fault-tolerant model predictive control of 5-phase PMSG under an open-circuit phase fault condition for marine current applications. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 5760–5765. [Google Scholar] [CrossRef]
- Liu, G.; Song, C.; Chen, Q. FCS-MPC-based fault-tolerant control of five-phase IPMSM for MTPA operation. IEEE Trans. Power Electron. 2020, 35, 2882–2894. [Google Scholar] [CrossRef]
- Huang, W.; Hua, W.; Chen, F.; Yin, F.; Qi, J. Model predictive current control of open-circuit fault-tolerant five-phase flux-switching permanent magnet motor drives. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1840–1849. [Google Scholar] [CrossRef]
- Lu, H.; Li, J.; Qu, R.; Ye, D.; Xiao, L. Reduction of unbalanced axial magnetic force in postfault operation of a novel six-phase double-stator axial-flux PM machine using model predictive control. IEEE Trans. Ind. Appl. 2017, 53, 5461–5469. [Google Scholar] [CrossRef]
- Baudart, F.; Dehez, B.; Matagne, E.; Telteu-Nedelcu, D.; Alexandre, P.; Labrique, F. Torque control strategy of polyphase permanent-magnet synchronous machines with minimal controller reconfiguration under open-circuit fault of one phase. IEEE Trans. Ind. Electron. 2012, 59, 2632–2644. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F.; Bogado, B.; Toral, S. Speed control of five-phase induction motors with integrated open-phase fault operation using model-based predictive current control techniques. IEEE Trans. Ind. Electron. 2014, 61, 4474–4484. [Google Scholar] [CrossRef]
- Lu, H.; Li, J.; Qu, R.; Ye, D. Fault-tolerant predictive current control with two-vector modulation for six-phase permanent magnet synchronous machine drives. IET Electric Power Appl. 2018, 12, 169–178. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. Pre- and post-fault tolerant operation of a six-phase PMSM motor using FCS-MPC without controller reconfiguration. IEEE Trans. Veh. Technol. 2019, 68, 254–263. [Google Scholar] [CrossRef]
- Tao, T.; Zhao, W.; Du, Y.; Cheng, Y.; Zhu, J. Simplified fault-tolerant model predictive control for a five-phase permanent-magnet motor with reduced computation burden. IEEE Trans. Power Electron. 2020, 35, 3850–3858. [Google Scholar] [CrossRef]
- Tao, T.; Zhao, W.; He, Y.; Cheng, Y.; Saeed, S.; Zhu, J. Enhanced fault-tolerant model predictive current control for a five-phase PM motor with continued modulation. IEEE Trans. Power Electron. 2021, 36, 3236–3246. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F. A comprehensive fault analysis of a five-phase induction motor drive with an open phase. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. LS5b.3-1–LS5b.3-6. [Google Scholar] [CrossRef]
- Tenconi, A.; Rubino, S.; Bojoi, R. Model predictive control for multiphase motor drives–A technology status review. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018—ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 732–739. [Google Scholar] [CrossRef]
- Salehi Arashloo, R.; Salehifar, M.; Romeral, L.; Sala, V. A robust predictive current controller for healthy and open-circuit faulty conditions of five-phase BLDC drives applicable for wind generators and electric vehicles. Energy Convers. Manag. 2015, 92, 437–447. [Google Scholar] [CrossRef]
- Lu, H.; Li, J.; Qu, R.; Ye, D.; Lu, Y. Fault-tolerant predictive control of six-phase PMSM drives based on pulsewidth modulation. IEEE Trans. Ind. Electron. 2019, 66, 4992–5003. [Google Scholar] [CrossRef]
- Ye, D.; Li, J.; Chen, J.; Qu, R.; Xiao, L. Study on steady-state errors for asymmetrical six-phase permanent magnet synchronous machine fault-tolerant predictive current control. IEEE Trans. Power Electron. 2020, 35, 640–651. [Google Scholar] [CrossRef]
- De Belie, F.; Kestelyn, X.; Nguyen, N.K. Fault-tolerant optimal-current torque-controlled five-phase PMSMs with open-circuited phases: Position self-sensing operation. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Toliyat, H.A. Analysis and simulation of five-phase variable-speed induction motor drives under asymmetrical connections. IEEE Trans. Power Electron. 1998, 13, 748–756. [Google Scholar] [CrossRef]
- Parsa, L.; Toliyat, H.A. Fault-tolerant interior-permanent-magnet machines for hybrid electric vehicle applications. IEEE Trans. Veh. Technol. 2007, 56, 1546–1552. [Google Scholar] [CrossRef]
- Dwari, S.; Parsa, L. Fault-tolerant control of five-phase permanent-magnet motors with trapezoidal back EMF. IEEE Trans. Ind. Electron. 2011, 58, 476–485. [Google Scholar] [CrossRef]
- Dwari, S.; Parsa, L. An optimal control technique for multiphase PM machines under open-circuit faults. IEEE Trans. Ind. Electron. 2008, 55, 1988–1995. [Google Scholar] [CrossRef]
- Mohammadpour, A.; Parsa, L. Global fault-tolerant control technique for multiphase permanent-magnet machines. IEEE Trans. Ind. Appl. 2015, 51, 178–186. [Google Scholar] [CrossRef]
- Kestelyn, X.; Semail, E. A vectorial approach for generation of optimal current references for multiphase permanent-magnet synchronous machines in real time. IEEE Trans. Ind. Electron. 2011, 58, 5057–5065. [Google Scholar] [CrossRef] [Green Version]
- Nounou, K.; Charpentier, J.F.; Marouani, K.; Benbouzid, M.; Kheloui, A. Emulation of an electric naval propulsion system based on a multiphase machine under healthy and faulty operating conditions. IEEE Trans. Veh. Technol. 2018, 67, 6895–6905. [Google Scholar] [CrossRef]
- Mekri, F.; Benelghali, S.; Benbouzid, M.; Charpentier, J.F. A fault-tolerant multiphase permanent magnet generator for marine current turbine applications. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 2079–2084. [Google Scholar] [CrossRef] [Green Version]
- Mekri, F.; Ben Elghali, S.; Benbouzid, M.E.H. Fault-tolerant control performance comparison of three- and five-phase pmsg for marine current turbine applications. IEEE Trans. Sustain. Energy 2013, 4, 425–433. [Google Scholar] [CrossRef]
- Mekri, F.; Elghali, S.B.; Charpentier, J.F.; Kestelyn, X.; Benbouzid, M. A new control strategy of 5-phase PM motor under open-circuited phase based on high order sliding mode and current references real-time generation. Electr. Power Compon. Syst. 2019, 47, 261–274. [Google Scholar] [CrossRef]
- Tian, B.; Mirzaeva, G.; An, Q.; Sun, L.; Semenov, D. Fault-tolerant control of a five-phase permanent magnet synchronous motor for industry applications. IEEE Trans. Ind. Appl. 2018, 54, 3943–3952. [Google Scholar] [CrossRef]
- Fnaiech, M.A.; Betin, F.; Capolino, G.A.; Fnaiech, F. Fuzzy logic and sliding-mode controls applied to six-phase induction machine with open phases. IEEE Trans. Ind. Electron. 2010, 57, 354–364. [Google Scholar] [CrossRef]
- Betin, F.; Capolino, G. Shaft positioning for six-phase induction machines with open phases using variable structure control. IEEE Trans. Ind. Electron. 2012, 59, 2612–2620. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.; Masoud, M.; Ahmed, S.; Massoud, A. Calculation of derating factors based on steady-state unbalanced multiphase induction machine model under open phase(s) and optimal winding currents. Electr. Power Syst. Res. 2014, 106, 214–225. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, B. Design and analysis of a five-phase fault-tolerant permanent magnet synchronous motor for aerospace starter-generator system. IEEE Access 2019, 7, 135040–135049. [Google Scholar] [CrossRef]
- Rahman, U.; Munim, A.; Che, H.; Tousizadeh, M.; Muhammad, K. Fault tolerance of asymmetrical six-phase induction machine during single open circuit fault to three open circuit faults using GUI. Int. J. Power Electron. Drive Syst. 2020, 11, 611. [Google Scholar] [CrossRef]
- Li, W.; Cheng, M. Investigation of influence of winding structure on reliability of permanent magnet machines. CES Trans. Electr. Mach. Syst. 2020, 4, 87–95. [Google Scholar] [CrossRef]
- Hang, J.; Ren, X.; Tang, C.; Tong, M.; Ding, S. Fault-tolerant control strategy for five-phase PMSM drive system with high-resistance connection. IEEE Trans. Transport. Electrific. 2021, 7, 1390–1400. [Google Scholar] [CrossRef]
- Zafari, Y.; Shoja-Majidabad, S. Sensorless fault-tolerant control of five-phase IPMSMs via model reference adaptive systems. Automatika 2020, 61, 564–573. [Google Scholar] [CrossRef]
- Zheng, P.; Sui, Y.; Zhao, J.; Tong, C.; Lipo, T.A.; Wang, A. Investigation of a novel five-phase modular permanent-magnet in-wheel motor. IEEE Trans. Magn. 2011, 47, 4084–4087. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. Application of standard three-phase stator frames in prime phase order multiphase machine construction. IEEE Trans. Ind. Electron. 2019, 66, 2506–2517. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Hamdy, R.A.; Massoud, A.M.; Ahmed, S. Low-order space harmonic modeling of asymmetrical six-phase induction machines. IEEE Access 2019, 7, 6866–6876. [Google Scholar] [CrossRef]
- Fu, J.R.; Lipo, T.A. Disturbance-free operation of a multiphase current-regulated motor drive with an opened phase. IEEE Trans. Ind. Appl. 1994, 30, 1267–1274. [Google Scholar] [CrossRef]
- Arafat, A.K.M.; Choi, S. Optimal phase advance under fault-tolerant control of a five-phase permanent magnet assisted synchronous reluctance motor. IEEE Trans. Ind. Electron. 2018, 65, 2915–2924. [Google Scholar] [CrossRef]
- Zhang, L.; Fan, Y.; Lorenz, R.D.; Nied, A.; Cheng, M. Design and comparison of three-phase and five-phase FTFSCW-IPM motor open-end winding drive systems for electric vehicles applications. IEEE Trans. Veh. Technol. 2018, 67, 385–396. [Google Scholar] [CrossRef]
- Huang, J.; Zheng, P.; Sui, Y.; Zheng, J.; Yin, Z.; Cheng, L. Third harmonic current injection in different operating stages of five-phase PMSM with hybrid single/double layer fractional-slot concentrated winding. IEEE Access 2021, 9, 15670–15685. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Pre, M.D. Strategies for the fault-tolerant current control of a five-phase permanent-magnet motor. IEEE Trans. Ind. Appl. 2007, 43, 960–970. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Pre, M.D. Impact of stator winding of a five-phase permanent-magnet motor on postfault operations. IEEE Trans. Ind. Electron. 2008, 55, 1978–1987. [Google Scholar] [CrossRef]
- Nounou, K.; Benbouzid, M.; Marouani, K.; Charpentier, J.F.; Kheloui, A. Performance comparison of open-circuit fault-tolerant control strategies for multiphase permanent magnet machines for naval applications. Electr. Eng. 2018, 100, 1827–1836. [Google Scholar] [CrossRef]
- Wang, J.; Atallah, K.; Howe, D. Optimal torque control of fault-tolerant permanent magnet brushless machines. IEEE Trans. Magn. 2003, 39, 2962–2964. [Google Scholar] [CrossRef]
- Lee, K.; Li, L.; Bai, K.; Ouyang, X.; Yang, H. Harmonic model and remedy strategy of multiphase PM motor under open-circuit fault. IEEE/ASME Trans. Mechatronics 2019, 24, 1407–1419. [Google Scholar] [CrossRef]
- Zhao, Y.; Lipo, T.A. Modeling and control of a multi-phase induction machine with structural unbalance–Part I: Machine modeling and multidimensional current regulation. IEEE Trans. Energy Convers. 1996, 11, 570–577. [Google Scholar] [CrossRef]
- Zhao, Y.; Lipo, T.A. Modeling and control of a multi-phase induction machine with structural unbalance–Part II: Field-oriented control and experimental verification. IEEE Trans. Energy Convers. 1996, 11, 578–584. [Google Scholar] [CrossRef]
- de Souza, T.S.; Bastos, R.R.; Cardoso Filho, B.J. Modeling and control of a nine-phase induction machine with open phases. IEEE Trans. Ind. Appl. 2018, 54, 6576–6585. [Google Scholar] [CrossRef]
- Tian, B.; Molinas, M.; An, Q.; Zhou, B.; Wei, J. Freewheeling current-based sensorless field-oriented control of five-phase permanent magnet synchronous motors under insulated gate bipolar transistor failures of a single phase. IEEE Trans. Ind. Electron. 2022, 69, 213–224. [Google Scholar] [CrossRef]
- Bianchi, N.; Fornasiero, E.; Bolognani, S. Thermal analysis of a five-phase motor under faulty operations. IEEE Trans. Ind. Appl. 2013, 49, 1531–1538. [Google Scholar] [CrossRef]
- Green, S.; Atkinson, D.; Jack, A.G.; Mecrow, B.C.; King, A. Sensorless operation of a fault tolerant PM drive. IEE Proc. Electric Power Appl. 2003, 150, 117–128. [Google Scholar] [CrossRef]
- Xu, J.; Du, Y.; Fang, H.; Guo, H.; Chen, Y. A robust observer and nonorthogonal PLL-based sensorless control for fault-tolerant permanent magnet motor with guaranteed postfault performance. IEEE Trans. Ind. Electron. 2020, 67, 5959–5970. [Google Scholar] [CrossRef]
- Arafat, A.K.M.; Choi, S. Active current harmonic suppression for torque ripple minimization at open-phase faults in a five-phase PMa-SynRM. IEEE Trans. Ind. Electron. 2019, 66, 922–931. [Google Scholar] [CrossRef]
- Ouenzerfi, S.; Zahr, H.; Trabelsi, M.; Semail, E.; Harmand, S.; Boubaker, R. 3-D multi-nodal thermal modelling for fault-tolerant machine. In Proceedings of the 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, VIC, Australia, 13–15 February 2019; pp. 1551–1556. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Fan, Y.; Li, C.; Nied, A.; Cheng, M. Fault-tolerant sensorless control of a five-phase FTFSCW-IPM motor based on a wide-speed strong-robustness sliding mode observer. IEEE Trans. Energy Convers. 2018, 33, 87–95. [Google Scholar] [CrossRef]
- Akay, A.; Lefley, P. Research on torque ripple under healthy and open-circuit fault-tolerant conditions in a PM multiphase machine. CES Trans. Electr. Mach. Syst. 2020, 4, 349–359. [Google Scholar] [CrossRef]
- Gerada, C.; Bradley, K.; Sumner, M.; Wheeler, P.; Picker, S.; Clare, J.; Whitley, C.; Towers, G. The results do mesh. IEEE Ind. Appl. Mag. 2007, 13, 62–72. [Google Scholar] [CrossRef]
- Feng, G.; Lu, Y.; Lai, C.; Ding, B.; Kar, N. Fault tolerant maximum torque per ampere (FT-MTPA) control for dual three-phase interior PMSMs under open-phase fault. IEEE Trans. Ind. Electron. 2022; accepted for publication. [Google Scholar] [CrossRef]
- Khadar, S.; Abdellah, K.; Benguesmia, H. Remedial robust control of five-phase fault-tolerant induction motor with open-end winding using reduced-order transformation matrices. Model. Meas. Control. A 2019, 92, 52–59. [Google Scholar] [CrossRef]
- Mohammadpour, A.; Mishra, S.; Parsa, L. Fault-tolerant operation of multiphase permanent-magnet machines using iterative learning control. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 201–211. [Google Scholar] [CrossRef]
- Guo, H.; Xu, J.; Chen, Y.H. Robust control of fault-tolerant permanent-magnet synchronous motor for aerospace application with guaranteed fault switch process. IEEE Trans. Ind. Electron. 2015, 62, 7309–7321. [Google Scholar] [CrossRef]
- Liang, Z.; Liang, D.; Kou, P.; Jia, S. Postfault control and harmonic current suppression for a symmetrical dual three-phase SPMSM drive under single-phase open-circuit fault. IEEE Access 2020, 8, 67674–67686. [Google Scholar] [CrossRef]
- Jiang, X.; Li, Q.; Huang, W.; Cao, R. A dual-winding fault-tolerant motor drive system based on the redundancy bridge arm. IEEE Trans. Ind. Electron. 2019, 66, 654–662. [Google Scholar] [CrossRef]
- Yepes, A.G.; Doval-Gandoy, J.; Toliyat, H. Improvement of postfault performance of multiphase drives in terms of operating region and stator copper loss. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5819–5824. [Google Scholar] [CrossRef]
- Hu, Y.; Huang, S.; Wu, X.; Li, X. Control of dual three-phase permanent magnet synchronous machine based on five-leg inverter. IEEE Trans. Power Electron. 2019, 34, 11071–11079. [Google Scholar] [CrossRef]
- Jing, G.; Zhou, C. Control strategy for a five-leg inverter supplying dual three-phase PMSM. IEEE Access 2020, 8, 174480–174488. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Elserougi, A.A.; Massoud, A.M. Effect of stator winding connection of five-phase induction machines on torque ripples under open line condition. IEEE/ASME Trans. Mechatronics 2015, 20, 580–593. [Google Scholar] [CrossRef]
- Wang, P.; Gong, S.; Sun, X.; Liu, Z.; Jiang, D.; Qu, R. Fault-tolerant reconfiguration topology and control strategy for symmetric open-winding multiphase machines. IEEE Trans. Ind. Electron. 2022; accepted for publication. [Google Scholar] [CrossRef]
- Melo, V.F.M.B.; Jacobina, C.B.; Rocha, N.; Braga-Filho, E.R. Fault tolerance performance of two hybrid six-phase drive systems under single-phase open-circuit fault operation. IEEE Trans. Ind. Appl. 2019, 55, 2973–2983. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Morsy, A.S.; Ahmed, S.; Massoud, A.M. Effect of stator winding connection on performance of five-phase induction machines. IEEE Trans. Ind. Electron. 2014, 61, 3–19. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Elgenedy, M.A.; Ahmed, S.; Massoud, A.M. An improved fault-tolerant five-phase induction machine using a combined star/pentagon single layer stator winding connection. IEEE Trans. Ind. Electron. 2016, 63, 618–628. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.M. A nine-phase six-terminal concentrated single-layer winding layout for high-power medium-voltage induction machines. IEEE Trans. Ind. Electron. 2017, 64, 1796–1806. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. Nine-phase six-terminal induction machine modeling using vector space decomposition. IEEE Trans. Ind. Electron. 2019, 66, 988–1000. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. An improved torque density pseudo six-phase induction machine using a quadruple three-phase stator winding. IEEE Trans. Ind. Electron. 2020, 67, 1855–1866. [Google Scholar] [CrossRef]
- Baneira, F.; Doval-Gandoy, J.; Yepes, A.G.; Lopez, O.; Pérez-Estévez, D. Control strategy for multiphase drives with minimum losses in the full torque operation range under single open-phase fault. IEEE Trans. Power Electron. 2017, 32, 6275–6285. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.M. A six-phase 24-slot/10-pole permanent-magnet machine with low space harmonics for electric vehicle applications. IEEE Trans. Magn. 2016, 52, 1–10. [Google Scholar] [CrossRef]
- Kianinezhad, R.; Nahid-Mobarakeh, B.; Baghli, L.; Betin, F.; Capolino, G.A. Modeling and control of six-phase symmetrical induction machine under fault condition due to open phases. IEEE Trans. Ind. Electron. 2008, 55, 1966–1977. [Google Scholar] [CrossRef]
- Duran, M.J.; Gonzalez-Prieto, I.; Bermudez, M.; Barrero, F.; Guzman, H.; Arahal, M.R. Optimal fault-tolerant control of six-phase induction motor drives with parallel converters. IEEE Trans. Ind. Electron. 2016, 63, 629–640. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Che, H.S.; Levi, E.; Bermudez, M.; Barrero, F. Fault-tolerant operation of six-phase energy conversion systems with parallel machine-side converters. IEEE Trans. Power Electron. 2016, 31, 3068–3079. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Prieto, I.; Duran, M.J.; Barrero, F.; Bermudez, M.; Guzmán, H. Impact of postfault flux adaptation on six-phase induction motor drives with parallel converters. IEEE Trans. Power Electron. 2017, 32, 515–528. [Google Scholar] [CrossRef] [Green Version]
- Mohammadpour, A.; Parsa, L. A unified fault-tolerant current control approach for five-phase PM motors with trapezoidal back EMF under different stator winding connections. IEEE Trans. Power Electron. 2013, 28, 3517–3527. [Google Scholar] [CrossRef]
- Mohammadpour, A.; Sadeghi, S.; Parsa, L. A generalized fault-tolerant control strategy for five-phase PM motor drives considering star, pentagon, and pentacle connections of stator windings. IEEE Trans. Ind. Electron. 2014, 61, 63–75. [Google Scholar] [CrossRef]
- Cervone, A.; Dordevic, O.; Brando, G. General approach for modelling and control of multiphase PMSM drives. IEEE Trans. Power Electron. 2021, 36, 10490–10503. [Google Scholar] [CrossRef]
- Cervone, A.; Slunjski, M.; Levi, E.; Brando, G. Optimal Third-Harmonic Current Injection for Asymmetrical Multiphase Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 2772–2783. [Google Scholar] [CrossRef] [Green Version]
- Gjerde, S.S.; Olsen, P.K.; Ljøkelsøy, K.; Undeland, T.M. Control and fault handling in a modular series-connected converter for a transformerless 100 kV low-weight offshore wind turbine. IEEE Trans. Ind. Appl. 2014, 50, 1094–1105. [Google Scholar] [CrossRef]
- Gu, C.; Yan, H.; Yang, J.; Sala, G.; De Gaetano, D.; Wang, X.; Galassini, A.; Degano, M.; Zhang, X.; Buticchi, G. A multiport power conversion system for the more electric aircraft. IEEE Trans. Transport. Electrific. 2020, 6, 1707–1720. [Google Scholar] [CrossRef]
- dos Santos Moraes, T.; Nguyen, N.K.; Semail, E.; Meinguet, F.; Guerin, M. Dual-multiphase motor drives for fault-tolerant applications: Power electronic structures and control strategies. IEEE Trans. Power Electron. 2018, 33, 572–580. [Google Scholar] [CrossRef] [Green Version]
- Gupta, N.; Gopika, T.G.; Kaarthik, R.S. Modeling and decoupled control of series-connected split-phase synchronous machines with open-circuit fault. IEEE Trans. Ind. Appl. 2020, 56, 325–334. [Google Scholar] [CrossRef]
- Zhao, M.; Liu, G.; Chen, Q.; Zhao, W.; Lee, C.H.T. Fault-tolerant control of a triple redundant PMA-SynRM driven under single-phase open-circuit by mono-inverter. IEEE Trans. Power Electron. 2021, 36, 11593–11605. [Google Scholar] [CrossRef]
- Melo, V.F.M.B.; Jacobina, C.B.; Rocha, N. Fault tolerance performance of dual-inverter-based six-phase drive system under single-, two-, and three-phase open-circuit fault operation. IET Power Electron. 2018, 11, 212–220. [Google Scholar] [CrossRef]
- Madonna, V.; Giangrande, P.; Gerada, C.; Galea, M. Thermal analysis of fault-tolerant electrical machines for aerospace actuators. IET Electric Power Appl. 2019, 13, 843–852. [Google Scholar] [CrossRef]
- Atallah, K.; Wang, J.; Howe, D. Torque-ripple minimization in modular permanent-magnet brushless machines. IEEE Trans. Ind. Appl. 2003, 39, 1689–1695. [Google Scholar] [CrossRef]
- Ede, J.D.; Atallah, K.; Wang, J.; Howe, D. Effect of optimal torque control on rotor loss of fault-tolerant permanent-magnet brushless machines. IEEE Trans. Magn. 2002, 38, 3291–3293. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, B.; Fang, H.; Guo, H. Guaranteeing the fault transient performance of aerospace multiphase permanent magnet motor system: An adaptive robust speed control approach. CES Trans. Electr. Mach. Syst. 2020, 4, 114–122. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, Z.; Li, Y. Enhancing fault-tolerant ability of a nine-phase induction motor drive system using fuzzy logic current controllers. IEEE Trans. Energy Convers. 2017, 32, 759–769. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Garcia-Entrambasaguas, P.; Bermudez, M. Field-oriented control of multiphase drives with passive fault tolerance. IEEE Trans. Ind. Electron. 2020, 67, 7228–7238. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Bermudez, M.; Barrero, F.; Martín, C. Assessment of virtual-voltage-based model predictive controllers in six-phase drives under open-phase faults. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2634–2644. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, A.; Gonzalez-Prieto, I.; Duran, M.J.; Barrero, F. Efficient model predictive control with natural fault-tolerance in asymmetrical six-phase induction machines. Energies 2019, 12, 3989. [Google Scholar] [CrossRef] [Green Version]
- Barrero, F.; Bermudez, M.; Duran, M.J.; Salas, P.; Gonzalez-Prieto, I. Assessment of a universal reconfiguration-less control approach in open-phase fault operation for multiphase drives. Energies 2019, 12, 4698. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Wang, Z.; Gu, M.; Xiao, D.; He, J.; Emadi, A. Diagnosis-free self-healing scheme for open-circuit faults in dual three-phase PMSM drives. IEEE Trans. Power Electron. 2020, 35, 12053–12071. [Google Scholar] [CrossRef]
- Kuang, Z.; Wu, S.; Du, B.; Xu, H.; Cui, S.; Chan, C.C. Thermal analysis of fifteen-phase permanent magnet synchronous motor under different fault tolerant operations. IEEE Access 2019, 7, 81466–81480. [Google Scholar] [CrossRef]
- Chai, F.; Gao, L.; Yu, Y.; Liu, Y. Fault-tolerant control of modular permanent magnet synchronous motor under open-circuit faults. IEEE Access 2019, 7, 154008–154017. [Google Scholar] [CrossRef]
- Si, B.; Fu, Q.; Wang, T.; Gao, C.; Zhu, J. Twofold fail-work remedy for reconfigurable driver and windings of four-phase permanent magnet fault-tolerant motor system. IEEE Trans. Power Electron. 2019, 34, 7763–7774. [Google Scholar] [CrossRef]
- Reddy, B.P.; Rao A, M.; Sahoo, M.; Keerthipati, S. A fault-tolerant multilevel inverter for improving the performance of a pole-phase modulated nine-phase induction motor drive. IEEE Trans. Ind. Electron. 2018, 65, 1107–1116. [Google Scholar] [CrossRef]
- Kumar, P.; Rathore, V.; Yadav, K.B. Fault tolerance study of symmetrical six-phase induction drive. In Proceedings of the 2020 First IEEE International Conference on Measurement, Instrumentation, Control and Automation (ICMICA), Kurukshetra, India, 24–26 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Analysis and tests of a dual three-phase 12-slot 10-pole permanent-magnet motor. IEEE Trans. Ind. Appl. 2010, 46, 2355–2362. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Faulty operations of a PM fractional-slot machine with a dual three-phase winding. IEEE Trans. Ind. Electron. 2011, 58, 3825–3832. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Six-phase supply feasibility using a PM fractional-slot dual winding machine. IEEE Trans. Ind. Appl. 2011, 47, 2042–2050. [Google Scholar] [CrossRef]
- Alberti, L.; Bianchi, N. Impact of winding arrangement in dual 3-phase induction motor for fault tolerant applications. In Proceedings of the XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Alberti, L.; Bianchi, N. Experimental tests of dual three-phase induction motor under faulty operating condition. IEEE Trans. Ind. Electron. 2012, 59, 2041–2048. [Google Scholar] [CrossRef]
- Park, J.K.; Babetto, C.; Berardi, G.; Hur, J.; Bianchi, N. Comparison of fault characteristics according to winding configurations for dual three-phase synchronous reluctance motor. IEEE Trans. Ind. Appl. 2021, 57, 2398–2406. [Google Scholar] [CrossRef]
- Bianchi, N.; Park, J.; Tortella, A.; Zavagnin, R. Experimental tests of dual three-phase synchronous reluctance motor under half-control mode. IEEE Trans. Ind. Appl. 2021, 57, 5887–5893. [Google Scholar] [CrossRef]
- Popescu, M.; Dorrell, D.G.; Alberti, L.; Bianchi, N.; Staton, D.A.; Hawkins, D. Thermal analysis of duplex three-phase induction motor under fault operating conditions. IEEE Trans. Ind. Appl. 2013, 49, 1523–1530. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Elserougi, A.A.; Massoud, A.M. A voltage-behind-reactance model of five-phase induction machines considering the effect of magnetic saturation. IEEE Trans. Energy Convers. 2013, 28, 576–592. [Google Scholar] [CrossRef]
- Apsley, J.; Williamson, S. Analysis of multiphase induction machines with winding faults. IEEE Trans. Ind. Appl. 2006, 42, 465–472. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.M. Steady-state equivalent circuit of five-phase induction machines with different stator connections under open-line conditions. IEEE Trans. Ind. Electron. 2016, 63, 4651–4662. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.M. Steady-state mathematical modeling of a five-phase induction machine with a combined star/pentagon stator winding connection. IEEE Trans. Ind. Electron. 2016, 63, 1331–1343. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, J.; Wang, B. Performance assessment of triple redundant nine-phase delta- and wye-connected permanent magnet-assisted synchronous reluctance motor under healthy and fault conditions. J. Eng. Technol. 2019, 2019, 3563–3567. [Google Scholar] [CrossRef]
- Che, H.S.; Hew, W.P. Dual three-phase operation of single neutral symmetrical six-phase machine for improved performance. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 1176–1181. [Google Scholar] [CrossRef]
- Ifedi, C.J.; Mecrow, B.C.; Brockway, S.T.M.; Boast, G.S.; Atkinson, G.J.; Kostic-Perovic, D. Fault-tolerant in-wheel motor topologies for high-performance electric vehicles. IEEE Trans. Ind. Appl. 2013, 49, 1249–1257. [Google Scholar] [CrossRef]
- Golovanov, D.; Gerada, D.; Sala, G.; Degano, M.; Trentin, A.; Connor, P.H.; Xu, Z.; La Rocca, A.; Galassini, A.; Tarisciotti, L.; et al. 4MW class high-power-density generator for future hybrid-electric aircraft. IEEE Trans. Transport. Electrific. 2021, 7, 2952–2964. [Google Scholar] [CrossRef]
- Bastos, R.R.; de Souza, T.S.; de Carvalho, M.M.; Silva, L.A.R.; Filho, B.J.C. Assessment of a nine-phase induction motor drive for metal industry applications. IEEE Trans. Ind. Appl. 2020, 56, 7217–7226. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.M. Dynamic modeling of a five-phase induction machine with a combined star/pentagon stator winding connection. IEEE Trans. Energy Convers. 2016, 31, 1645–1656. [Google Scholar] [CrossRef]
- Apsley, J.M. Derating of multiphase induction machines due to supply imbalance. IEEE Trans. Ind. Appl. 2010, 46, 798–805. [Google Scholar] [CrossRef]
- Jordan, S.; Manolopoulos, C.D.; Apsley, J.M. Winding configurations for five-phase synchronous generators with diode rectifiers. IEEE Trans. Ind. Electron. 2016, 63, 517–525. [Google Scholar] [CrossRef]
- Sulligoi, G.; Tessarolo, A.; Benucci, V.; Baret, M.; Rebora, A.; Taffone, A. Modeling, simulation, and experimental validation of a generation system for medium-voltage dc integrated power systems. IEEE Trans. Ind. Appl. 2010, 46, 1304–1310. [Google Scholar] [CrossRef]
- Schiestl, M.; Marcolini, F.; Incurvati, M.; Capponi, F.G.; Stärz, R.; Caricchi, F.; Rodriguez, A.S.; Wild, L. Development of a high power density drive system for unmanned aerial vehicles. IEEE Trans. Power Electron. 2021, 36, 3159–3171. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part II: Fault diagnosis with knowledge-based and hybrid/active approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef] [Green Version]
- Wu, L.; Huang, X.; Habetler, T.G.; Harley, R.G. Eliminating load oscillation effects for rotor eccentricity detection in closed-loop drive-connected induction motors. IEEE Trans. Power Electron. 2007, 22, 1543–1551. [Google Scholar] [CrossRef]
- Cardoso, A.J.M.; Saraiva, E.S. Computer-aided detection of airgap eccentricity in operating three-phase induction motors by Park’s vector approach. IEEE Trans. Ind. Appl. 1993, 29, 897–901. [Google Scholar] [CrossRef]
- Jeong, H.; Moon, S.; Kim, S.W. An early stage interturn fault diagnosis of PMSMs by using negative-sequence components. IEEE Trans. Ind. Electron. 2017, 64, 5701–5708. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Mills, A.R.; Chong, E.; Sun, Z. Detection and classification of turn fault and high resistance connection fault in permanent magnet machines based on zero sequence voltage. IEEE Trans. Power Electron. 2020, 35, 1922–1933. [Google Scholar] [CrossRef]
- Yepes, A.G.; Riveros, J.A.; Doval-Gandoy, J.; Barrero, F.; Lopez, O.; Bogado, B.; Jones, M.; Levi, E. Parameter identification of multiphase induction machines with distributed windings–Part 1: Sinusoidal excitation methods. IEEE Trans. Energy Convers. 2012, 27, 1056–1066. [Google Scholar] [CrossRef]
- Zhu, B.; Tan, C.; Farshadnia, M.; Fletcher, J.E. Postfault zero-sequence current injection for open-circuit diode/switch failure in open-end winding PMSM machines. IEEE Trans. Ind. Electron. 2019, 66, 5124–5132. [Google Scholar] [CrossRef]
- Vu, D.T.; Nguyen, N.K.; Semail, E. An overview of methods using reduced-ordered transformation matrices for fault-tolerant control of 5-phase machines with an open phase. In Proceedings of the 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, VIC, Australia, 13–15 February 2019; pp. 1557–1562. [Google Scholar] [CrossRef] [Green Version]
- Duran, M.J.; Gonzalez-Prieto, I.; Barrero, F.; Levi, E.; Zarri, L.; Mengoni, M. A simple braking method for six-phase induction motor drives with unidirectional power flow in the base-speed region. IEEE Trans. Ind. Electron. 2017, 64, 6032–6041. [Google Scholar] [CrossRef] [Green Version]
- Noh, Y.; Kim, W.; Lee, J. The optimal current ratio control of redundant electric drive systems and diagnostic strategies for disagreement. IEEE Access 2021, 9, 32115–32130. [Google Scholar] [CrossRef]
- Pellegrino, G.; Bojoi, R.I.; Guglielmi, P. Unified direct-flux vector control for ac motor drives. IEEE Trans. Ind. Appl. 2011, 47, 2093–2102. [Google Scholar] [CrossRef]
- Varatharajan, A.; Pellegrino, G.; Armando, E. Direct flux vector control of synchronous motor drives: A small-signal model for optimal reference generation. IEEE Trans. Power Electron. 2021, 36, 10526–10535. [Google Scholar] [CrossRef]
- Levi, E. Chapter FOC: Field oriented control. In The Industrial Electronics Handbook; Electronics and Motor Drives; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Yepes, A.G.; Malvar, J.; Vidal, A.; Lopez, O.; Doval-Gandoy, J. Current harmonics compensation based on multiresonant control in synchronous frames for symmetrical n-phase machines. IEEE Trans. Ind. Electron. 2015, 62, 2708–2720. [Google Scholar] [CrossRef]
- Jones, M.; Vukosavic, S.N.; Dujic, D.; Levi, E. A synchronous current control scheme for multiphase induction motor drives. IEEE Trans. Energy Convers. 2009, 24, 860–868. [Google Scholar] [CrossRef]
- Zhu, Y.; Gu, W.; Lu, K.; Wu, Z. Vector control of asymmetric dual three-phase PMSM in full modulation range. IEEE Access 2020, 8, 104479–104493. [Google Scholar] [CrossRef]
- Che, H.S.; Levi, E.; Jones, M.; Hew, W.P.; Rahim, N.A. Current control methods for an asymmetrical six-phase induction motor drive. IEEE Trans. Power Electron. 2014, 29, 407–417. [Google Scholar] [CrossRef] [Green Version]
- Yepes, A.G.; Doval-Gandoy, J. Simple carrier-based PWM for prolonged high dc-link utilization for symmetrical and asymmetrical n-phase ac drives. IEEE Trans. Power Electron. 2021, 36, 8696–8712. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Masoud, M.I.; Williams, B.W. Improved flux pattern with third harmonic injection for multiphase induction machines. IEEE Trans. Power Electron. 2012, 27, 1563–1578. [Google Scholar] [CrossRef]
- Mengoni, M.; Zarri, L.; Tani, A.; Parsa, L.; Serra, G.; Casadei, D. High-torque-density control of multiphase induction motor drives operating over a wide speed range. IEEE Trans. Ind. Electron. 2015, 62, 814–825. [Google Scholar] [CrossRef]
- Pérez-Estévez, D.; Doval-Gandoy, J.; Yepes, A.G.; Lopez, O.; Baneira, F. Enhanced resonant current controller for grid-connected converters with LCL filter. IEEE Trans. Power Electron. 2018, 33, 3765–3778. [Google Scholar] [CrossRef]
- Zmood, D.N.; Holmes, D.G. Stationary frame current regulation of PWM inverters with zero steady-state error. IEEE Trans. Power Electron. 2003, 18, 814–822. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J.; Abu-Rub, H. Assessing finite-control-set model predictive control: A comparison with a linear current controller in two-level voltage source inverters. IEEE Ind. Electron. Mag. 2014, 8, 44–52. [Google Scholar] [CrossRef]
- Aguilera, R.P.; Lezana, P.; Quevedo, D.E. Finite-control-set model predictive control with improved steady-state performance. IEEE Trans. Ind. Informat. 2013, 9, 658–667. [Google Scholar] [CrossRef]
- Garcia, C.F.; Silva, C.A.; Rodriguez, J.R.; Zanchetta, P.; Odhano, S.A. Modulated model-predictive control with optimized overmodulation. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 404–413. [Google Scholar] [CrossRef]
- Lim, C.; Levi, E.; Jones, M.; Rahim, N.; Hew, W. FCS-MPC-based current control of a five-phase induction motor and its comparison with PI-PWM control. IEEE Trans. Ind. Electron. 2014, 61, 149–163. [Google Scholar] [CrossRef]
- Gonçalves, P.; Cruz, S.; Mendes, A. Finite control set model predictive control of six-phase asymmetrical machines—An overview. Energies 2019, 12, 4693. [Google Scholar] [CrossRef] [Green Version]
- Romeral Martinez, J.L.; Arashloo, R.S.; Salehifar, M.; Moreno, J.M. Predictive current control of outer-rotor five-phase BLDC generators applicable for off-shore wind power plants. Electr. Power Syst. Res. 2015, 121, 260–269. [Google Scholar] [CrossRef]
- Xu, C.; Han, Z.; Lu, S. Deadbeat predictive current control for permanent magnet synchronous machines with closed-form error compensation. IEEE Trans. Power Electron. 2020, 35, 5018–5030. [Google Scholar] [CrossRef]
- Wu, L.; Liu, J.; Vazquez, S.; Mazumder, S.K. Sliding mode control in power converters and drives: A review. EEE/CAA J. Autom. Sin. 2022, 9, 392–406. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef] [Green Version]
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.A.; Williamson, S. Multiphase induction motor drives—A technology status review. IET Electric Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef] [Green Version]
- dos Santos Moraes, T.J.; Wu, H.; Semail, E.; Nguyen, N.K.; Vu, D.T. Optimal torque/speed characteristics of a five-phase synchronous machine under peak or rms current control strategies. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe), Lyon, France, 7–11 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Feng, G.; Lai, C.; Kelly, M.; Kar, N.C. Dual three-phase PMSM torque modeling and maximum torque per peak current control through optimized harmonic current injection. IEEE Trans. Ind. Electron. 2019, 66, 3356–3368. [Google Scholar] [CrossRef]
- Wasynczuk, O.; Sudhoff, S.; Corzine, K.; Tichenor, J.; Krause, P.; Hansen, I.; Taylor, L. A maximum torque per ampere control strategy for induction motor drives. IEEE Trans. Energy Convers. 1998, 13, 163–169. [Google Scholar] [CrossRef] [Green Version]
- Morimoto, S.; Takeda, Y.; Hirasa, T.; Taniguchi, K. Expansion of operating limits for permanent magnet motor by current vector control considering inverter capacity. IEEE Trans. Ind. Appl. 1990, 26, 866–871. [Google Scholar] [CrossRef]
- Trancho, E.; Ibarra, E.; Arias, A.; Kortabarria, I.; Jurgens, J.; Marengo, L.; Fricassè, A.; Gragger, J.V. PM-assisted synchronous reluctance machine flux weakening control for EV and HEV applications. IEEE Trans. Ind. Electron. 2018, 65, 2986–2995. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Du, Y.; Zhang, B.; Fang, H.; Guo, H.; Chen, Y.H. Sensorless fault-tolerant control with phase delay compensation for aerospace FTPMSM drives with phase open-circuit and short-circuit faults. IEEE Trans. Ind. Electron. 2021, 68, 4576–4585. [Google Scholar] [CrossRef]
- Zhou, H.; Liu, G.; Zhao, W.; Yu, X.; Gao, M. Dynamic performance improvement of five-phase permanent-magnet motor with short-circuit fault. IEEE Trans. Ind. Electron. 2018, 65, 145–155. [Google Scholar] [CrossRef]
- Cui, R.; Fan, Y.; Li, C. On-line inter-turn short-circuit fault diagnosis and torque ripple minimization control strategy based on OW five-phase BFTHE-IPM. IEEE Trans. Energy Convers. 2018, 33, 2200–2209. [Google Scholar] [CrossRef]
- Dieterle, O.; Greiner, T.; Heidrich, P. Control of a PMSM with quadruple three-phase star-connected windings under inverter short-circuit fault. IEEE Trans. Ind. Electron. 2019, 66, 685–695. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Abdel-Majeed, M.S.; Ahmed, S. Effect of winding configuration on six-phase induction machine parameters and performance. IEEE Access 2020, 8, 223009–223020. [Google Scholar] [CrossRef]
- Dujic, D.; Jones, M.; Levi, E. Analysis of output current-ripple rms in multiphase drives using polygon approach. IEEE Trans. Power Electron. 2010, 25, 1838–1849. [Google Scholar] [CrossRef]
- Sadeghi, S.; Guo, L.; Toliyat, H.A.; Parsa, L. Wide operational speed range of five-phase permanent magnet machines by using different stator winding configurations. IEEE Trans. Ind. Electron. 2012, 59, 2621–2631. [Google Scholar] [CrossRef]
- Sayed-Ahmed, A.; Mirafzal, B.; Demerdash, N.A.O. Fault-tolerant technique for δ-connected ac-motor drives. IEEE Trans. Energy Convers. 2011, 26, 646–653. [Google Scholar] [CrossRef]
- Nguyen, N.K.; Meinguet, F.; Semail, E.; Kestelyn, X. Fault-tolerant operation of an open-end winding five-phase PMSM drive with short-circuit inverter fault. IEEE Trans. Ind. Electron. 2016, 63, 595–605. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Wang, J.; Griffo, A.; Hua, W. Effective turn fault mitigation by creating zero sequence current path for a triple redundant 3 × 3-phase PMA SynRM. IEEE Trans. Power Electron. 2019, 34, 11080–11089. [Google Scholar] [CrossRef]
- Li, A.; Jiang, D.; Liu, Z.; Sun, X.; Kong, W. Unified analysis of winding connection sequence in series-end winding topology. IEEE Trans. Ind. Appl. 2021, 57, 516–527. [Google Scholar] [CrossRef]
- Raherimihaja, H.J.; Zhang, Q.; Na, T.; Shao, M.; Wang, J. A three-phase integrated battery charger for EVs based on six-phase open-end winding machine. IEEE Trans. Power Electron. 2020, 35, 12122–12132. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, D.; Enjeti, P.N.; Li, H.; Hawke, J.T.; Krishnamoorthy, H.S. Survey on fault-tolerant techniques for power electronic converters. IEEE Trans. Power Electron. 2014, 29, 6319–6331. [Google Scholar] [CrossRef]
- Welchko, B.A.; Lipo, T.A.; Jahns, T.M.; Schulz, S.E. Fault tolerant three-phase ac motor drive topologies: A comparison of features, cost, and limitations. IEEE Trans. Power Electron. 2004, 19, 1108–1116. [Google Scholar] [CrossRef] [Green Version]
- Levi, E. Multiphase electric machines for variable-speed applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]


















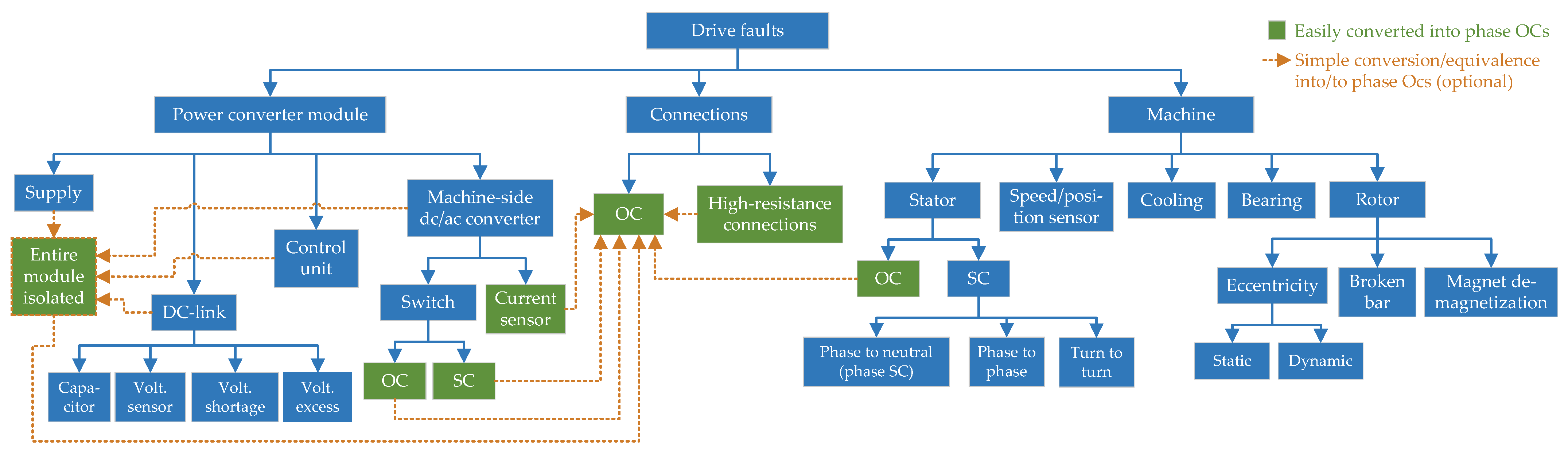{kind=link}
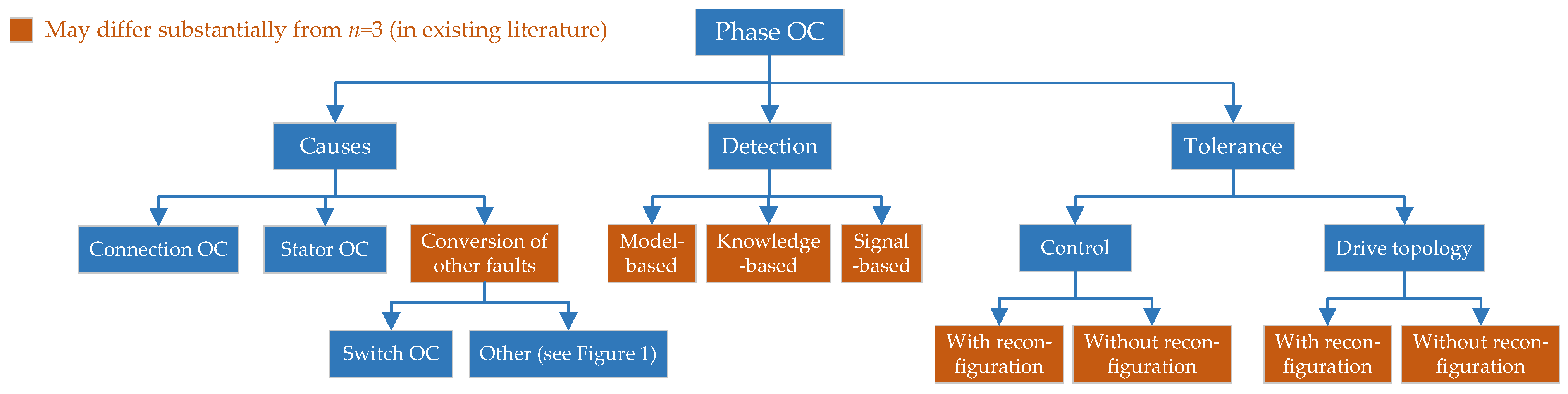{kind=link}
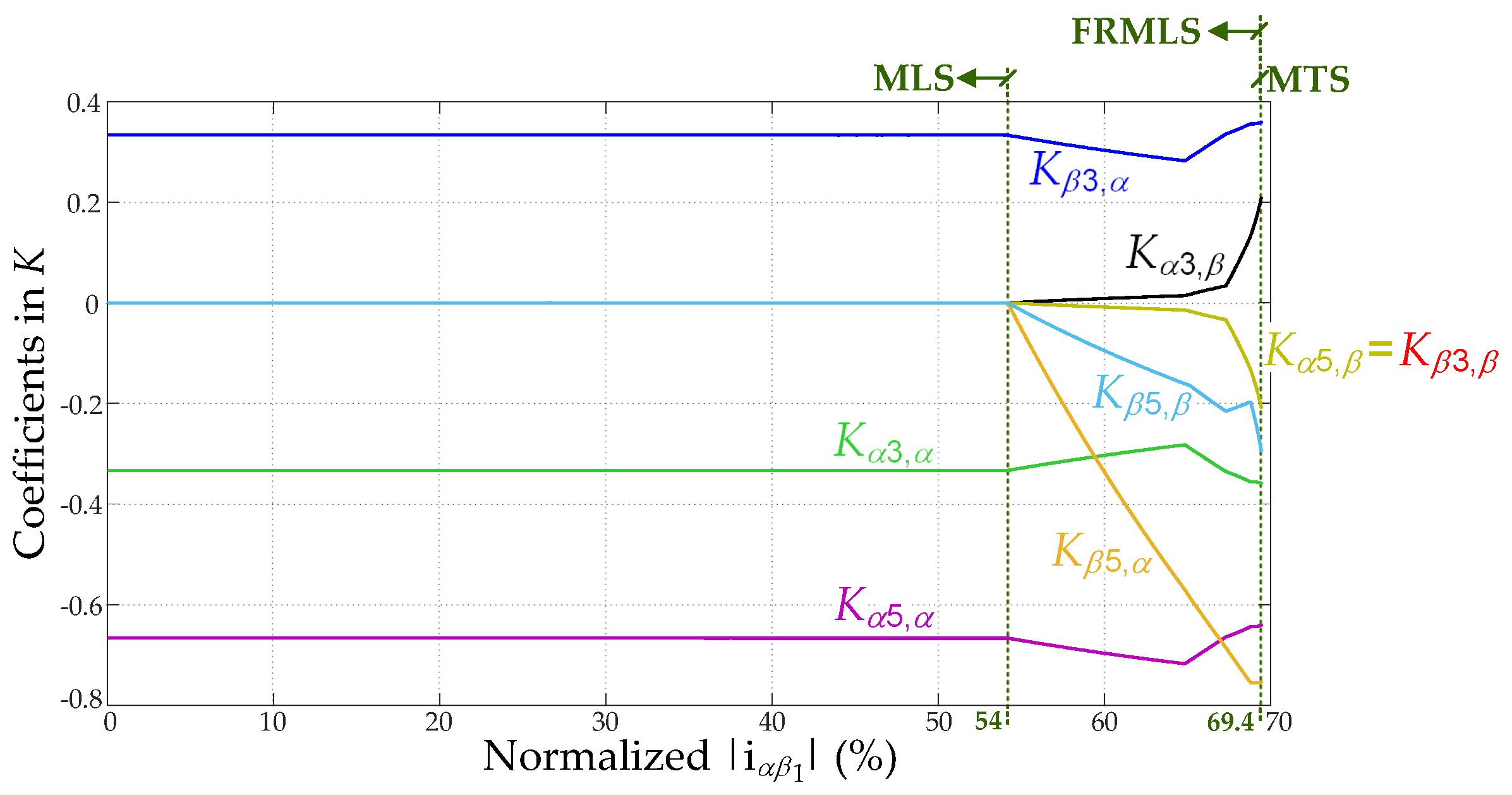{kind=link}
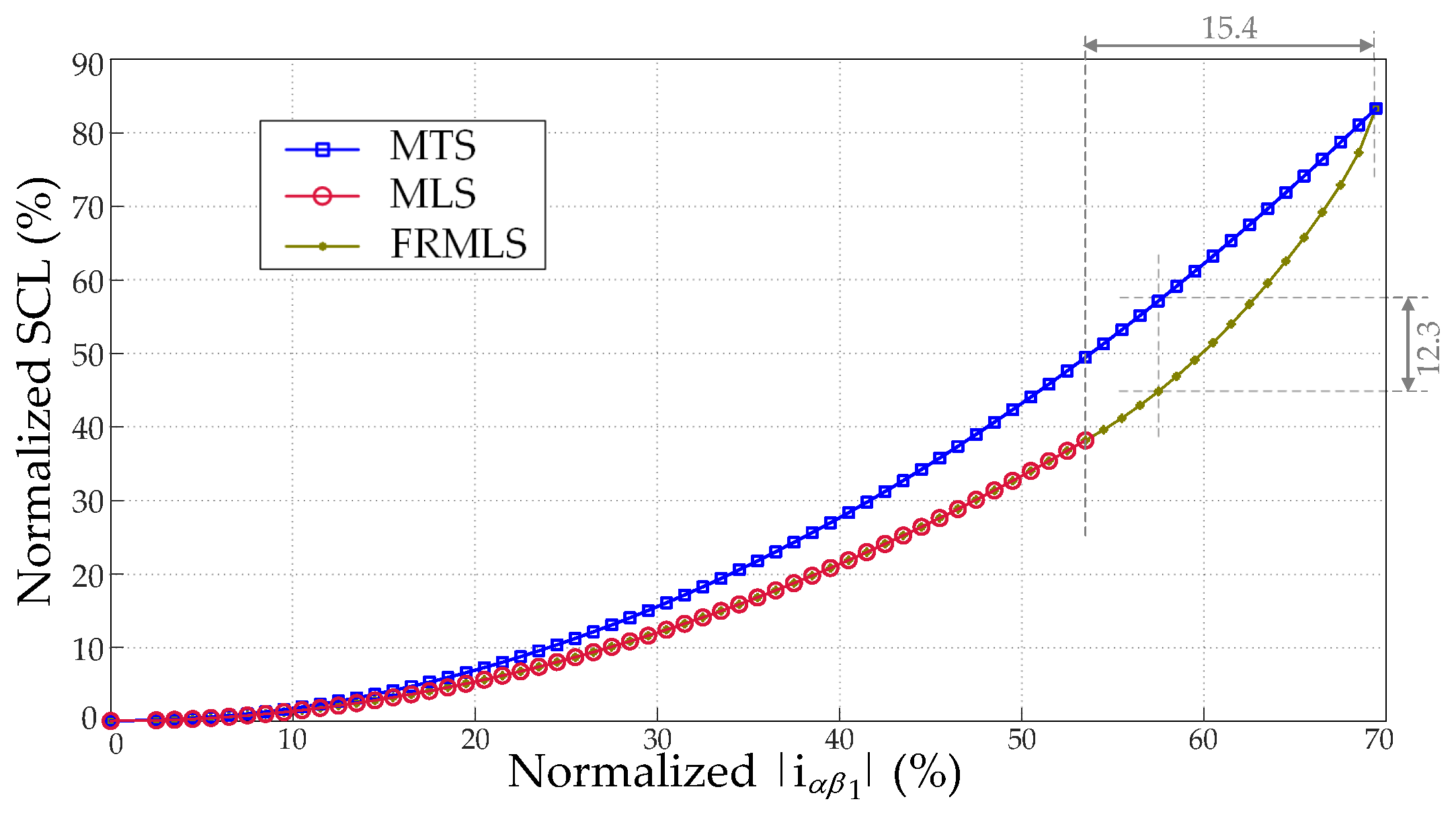{kind=link}
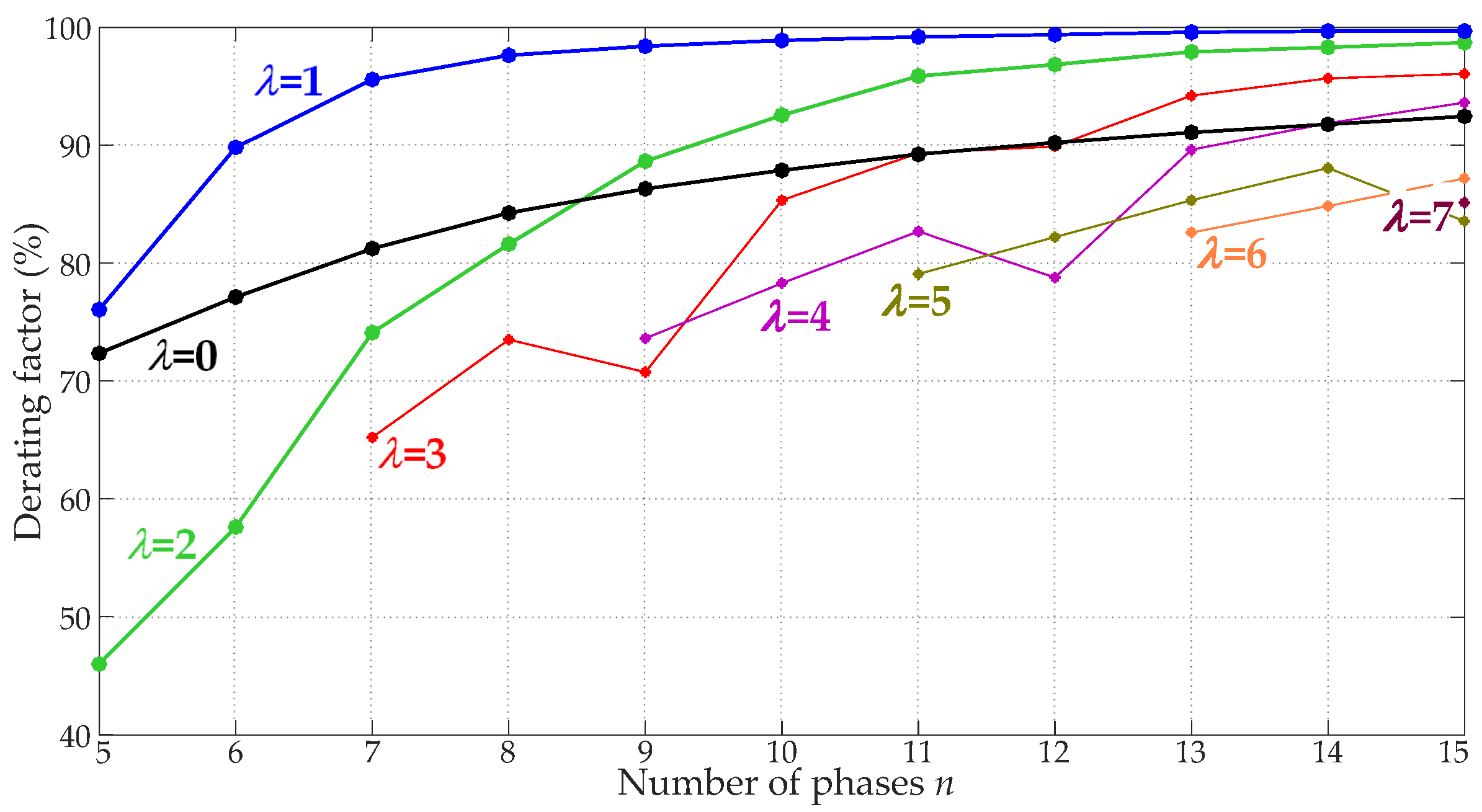{kind=link}
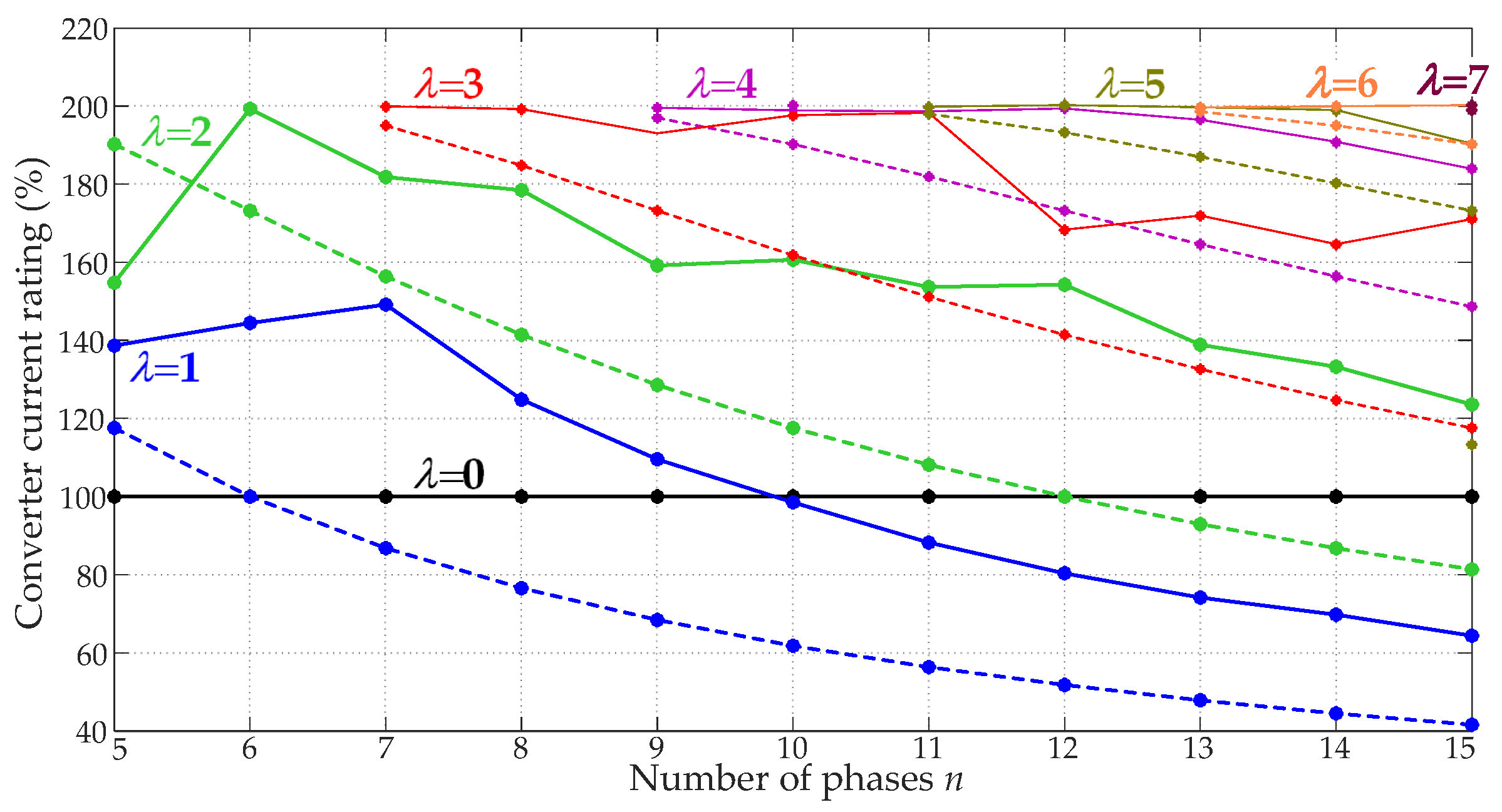{kind=link}
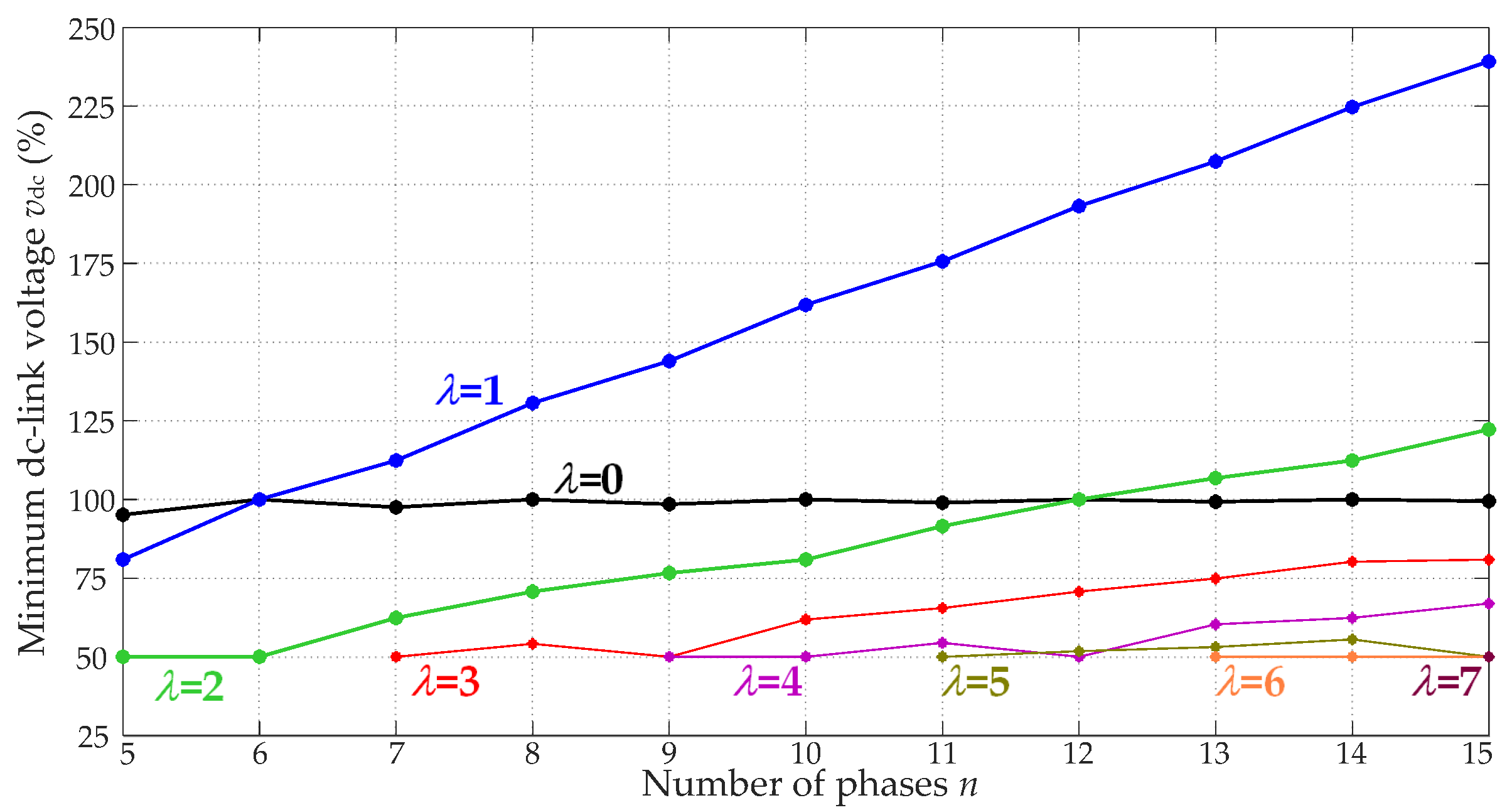{kind=link}
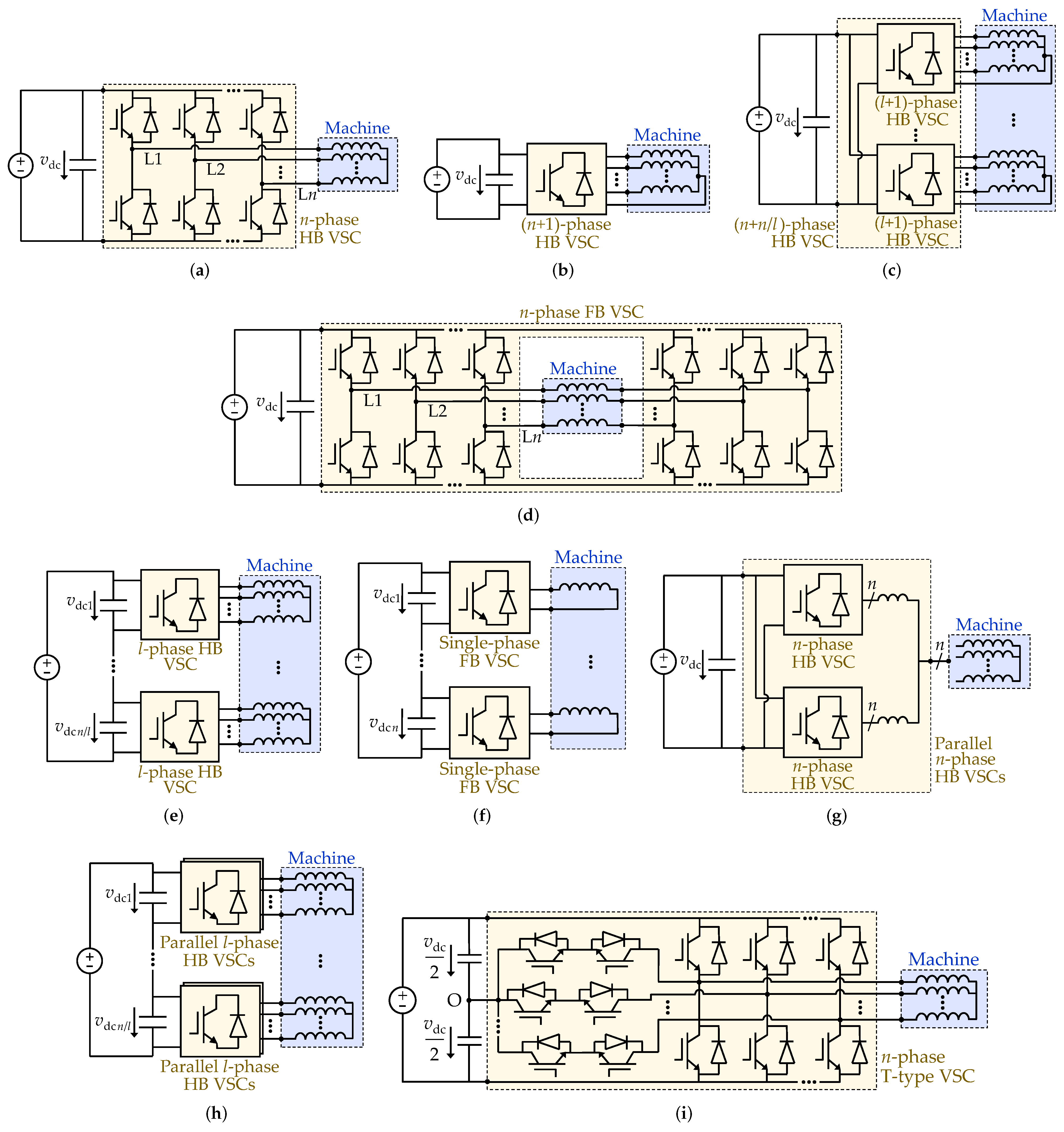{kind=link}
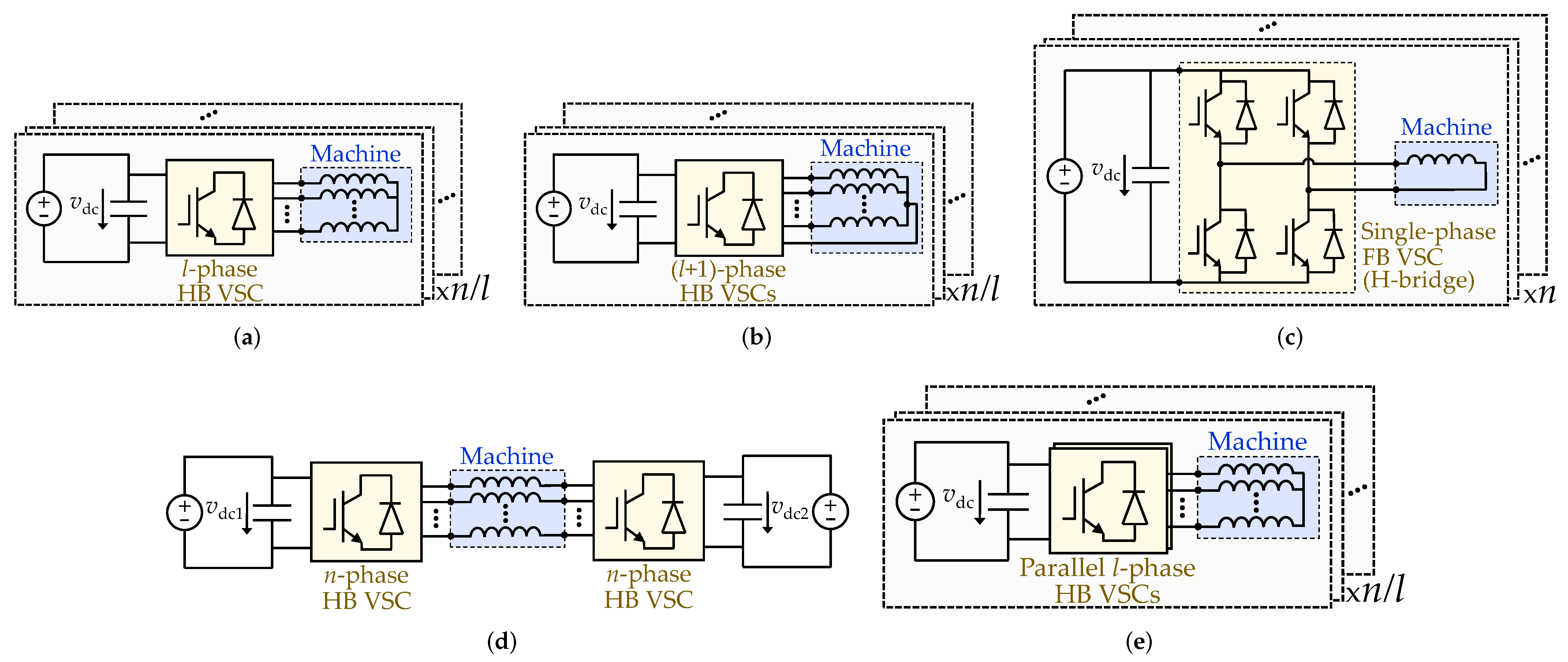{kind=link}
{kind=link}
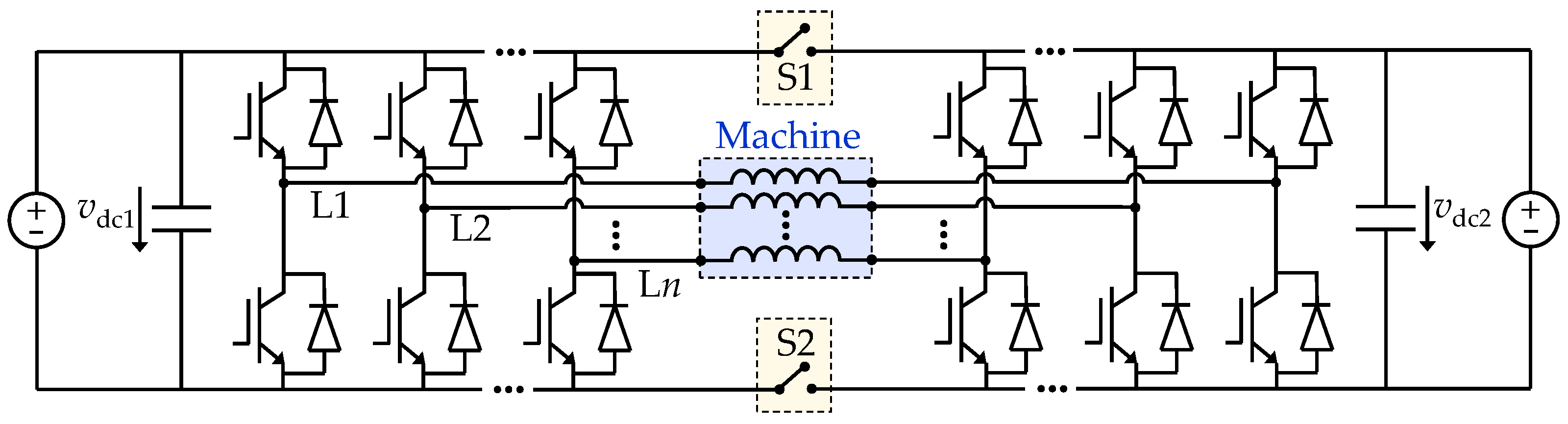{kind=link}
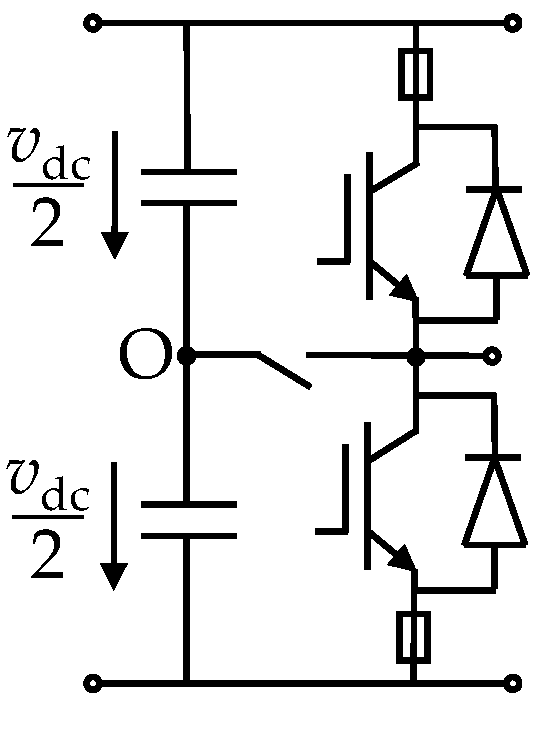{kind=link}
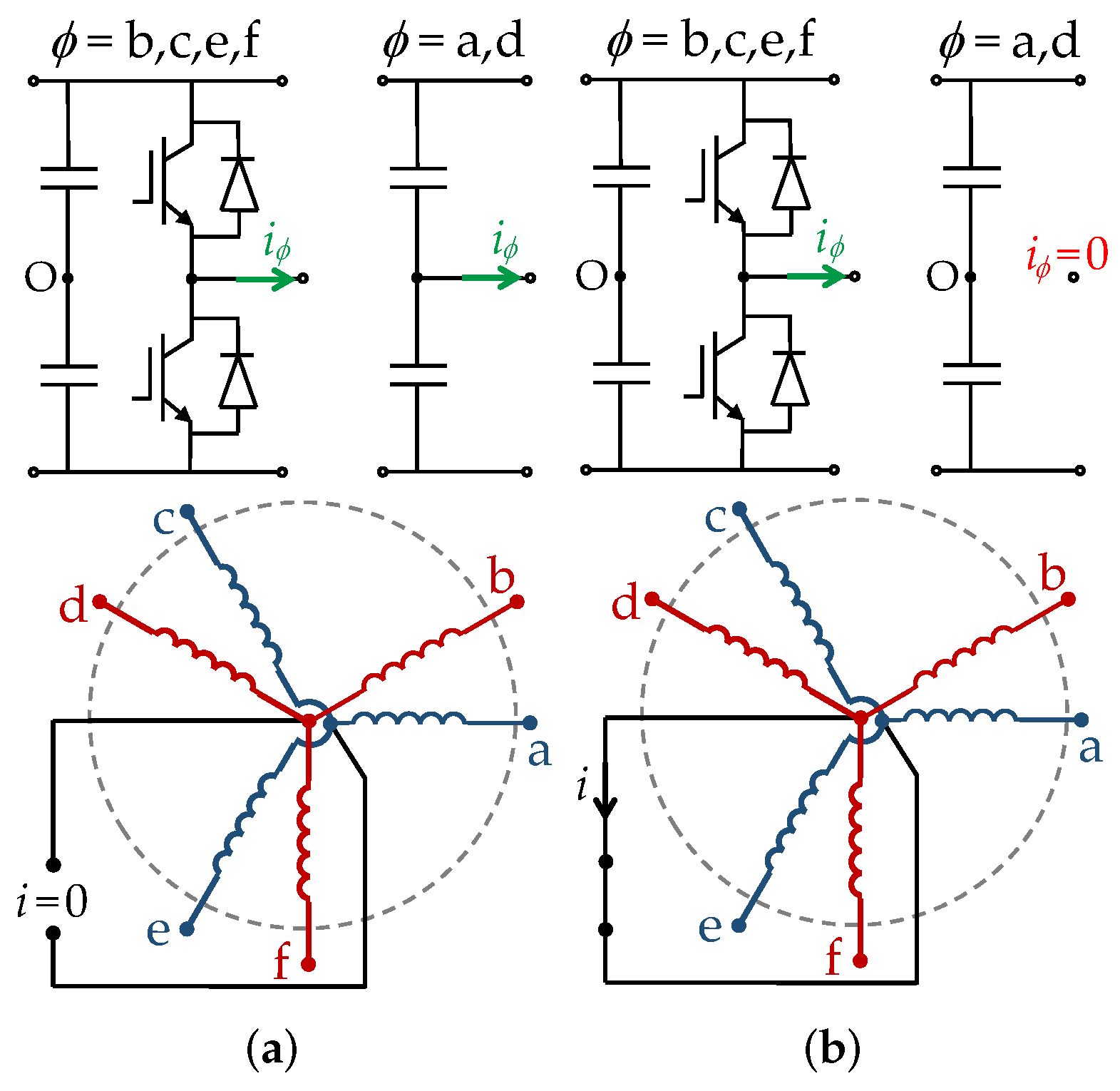{kind=link}
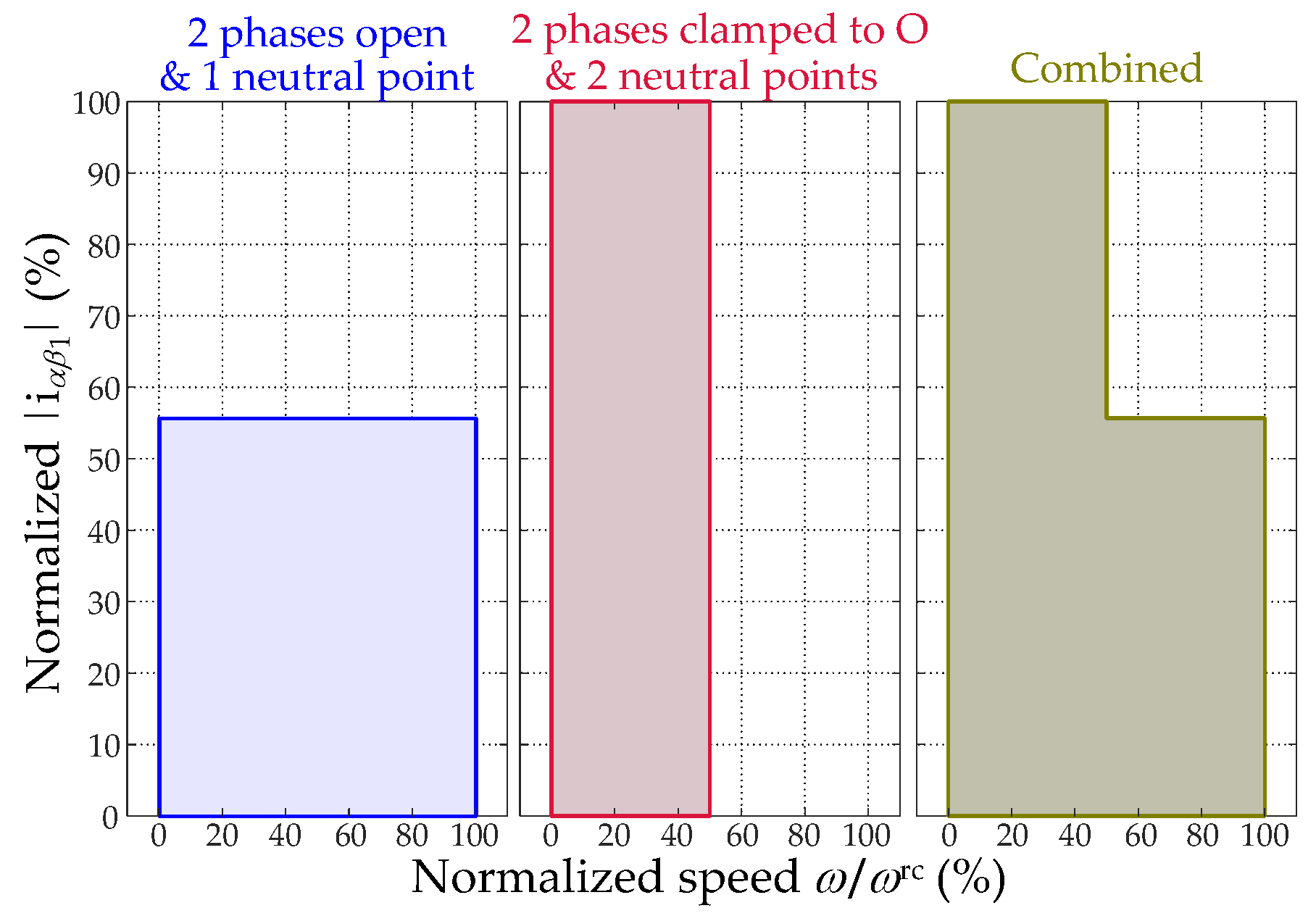{kind=link}
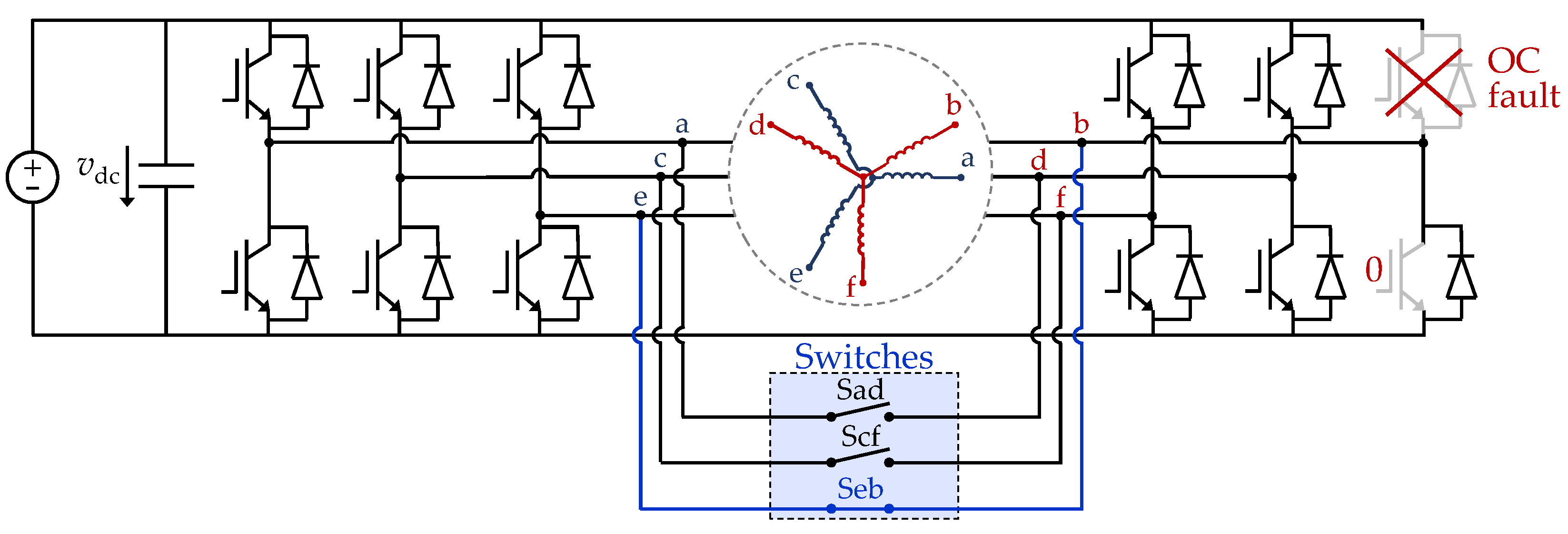{kind=link}
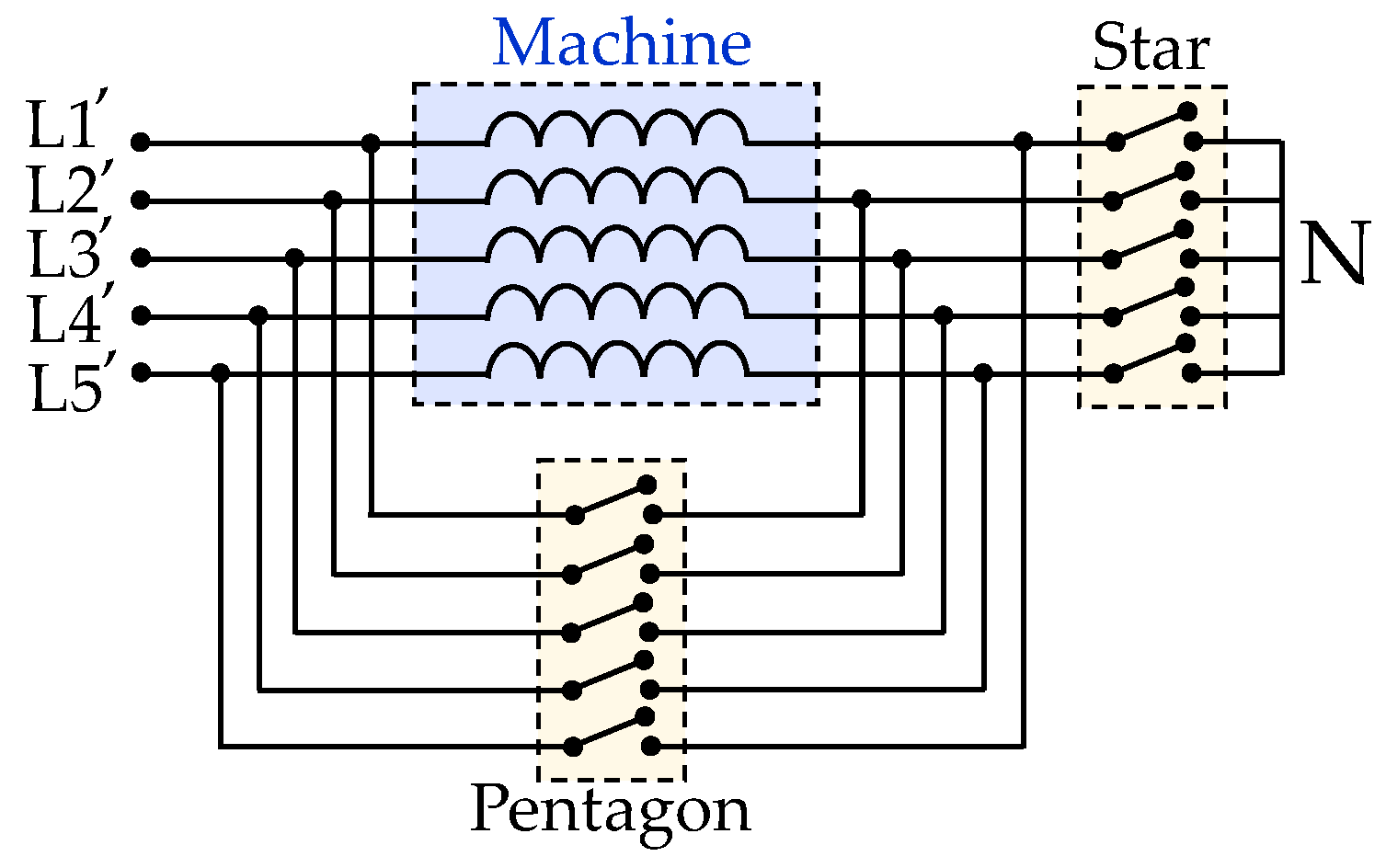{kind=link}
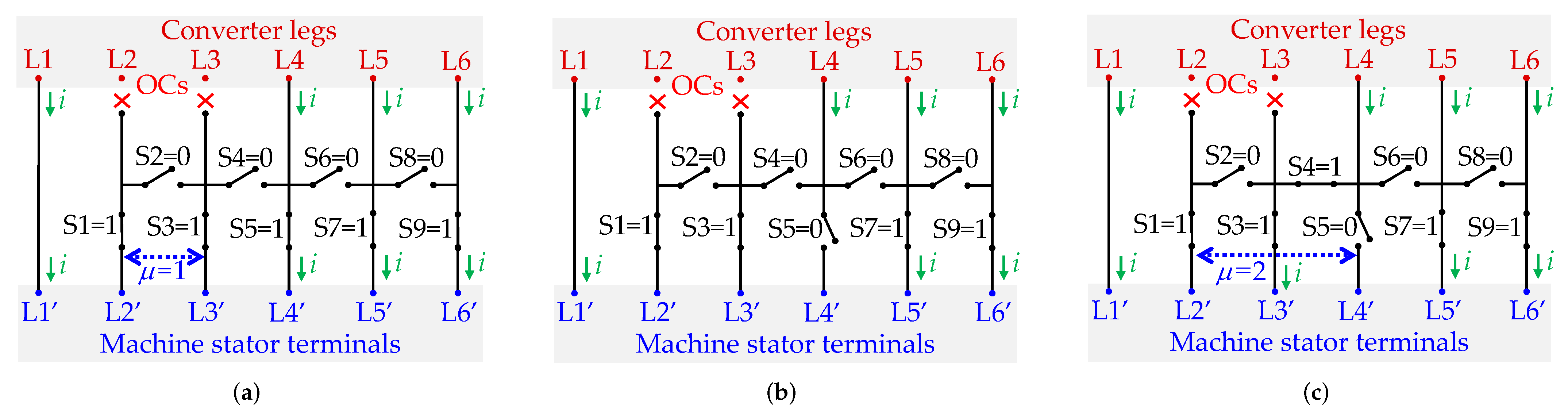{kind=link}
| References | Electric Drive | Type of | Requirements | OC | Fault ph. | Additional | Monitored | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Approach | R1 | R2 | R3 | R4 | R5 | Type | Location | Faults Detected | Current | ||
| Salehifar et al. [43] | 5-ph. PMSM | MB | Yes | Yes | Yes | Yes | No | Ph./sw. | Yes | No | Phase |
| Salehifar et al. [63] | 5-ph. PMSM | MB | Yes | Yes | No | Yes | No | Ph./sw. | Yes | No | Phase |
| Salehifar et al. [64] | 5-ph. PMSM | MB | Yes | Yes | Yes | Yes | No | Ph./sw. | Yes | Switch SC | Phase |
| Salehifar et al. [65] | 5-ph. PMSM | MB & SB | Yes | No * | Yes | Yes | No | Ph./sw. | Yes | No | Phase |
| Gonçalves et al. [44] | Asym. 6-ph. PMSM | MB | Yes | − | Yes | Yes | No | Phase | Yes | High-resistance | x-y |
| Gonçalves et al. [44] | Asym. 6-ph. PMSM | SB | Yes | − | Yes | Yes | Yes | Phase | Yes | High-resistance | x-y |
| Torabi et al. [45] | 5-ph. IM | MB & KB | Yes | Yes | No | Yes | Yes | Ph./sw. | Yes | No | Phase |
| Torabi et al. [46] | NPC 5-ph. IM | MB & KB | Yes | Yes | No | Yes | Yes | Ph./sw. | Yes | No | Phase |
| Olivieri [66] | 5-ph. PMSM | KB | Yes | No | No | Yes | No | Phase | Yes | No | - |
| Yao et al. [47] | 5-ph. PMSM | KB | Yes | No | No | No | No | Phase | Yes | Current sensor | |
| Meinguet et al. [48] | 5-ph. PMSM | SB | Yes | No | Yes | Yes | Yes | Ph./sw. | Yes | No | Phase |
| Various [49,50,67,68,69] | Any | SB | Yes | No | Yes | Yes | Yes | Phase | Yes | No | Phase |
| Jiang et al. [70] | Sym. 6-ph. PMSM | SB | Yes | No | Yes | Yes | Yes | Phase | Yes | Stator SC | Phase |
| Mesai-Ahmed et al. [51] | Asym. 6-ph. IM | SB | Yes | No | Yes | Yes | Yes | Ph./sw. | Yes | No | Phase |
| Wen et al. [52] | 3-sector 9-ph. PMSM | SB | Yes | Yes | Yes | No | No | Phase | No | No | Phase |
| Meinguet et al. [53] | 5-ph. PMSM | SB | Yes | No | Yes | No | No | Phase | No | No | - |
| Duran et al. [54] | Asym. 6-ph. IM | SB | Yes | Yes | Yes | Yes | Yes | Phase | Yes | No | - & a x-y |
| Gonzalez-Prieto et al. [71] | 5-ph. IM | SB | Yes | Yes | Yes | Yes | Yes | Ph./sw. | Yes | No | - & x-y |
| Kong et al. [55] | 5-ph. PMSM | SB | Yes | Yes | Yes | Yes | Yes | Ph./sw. | Yes | No | - & x-y |
| Farag et al. [56] | Sym. 6-ph. IM | SB | Yes | No | Yes | Yes | Yes | Ph./sw. | Yes | High-res., bars | Ph., - & x-y |
| Arafat et al. [57] | 5-ph. PMSM | SB | Yes | − | Yes | Yes | Yes | Phase | No | High-resistance | - & x-y |
| Chen et al. [58] | 5-ph. PMSM | SB | Yes | No | No | Yes | Yes | Ph./sw. | Yes | No | - & x-y |
| Trabelsi et al. [59] | 5-ph. PMSM | SB | Yes | Yes | Yes | Yes | Yes | Ph./sw. | Yes | No | Ph., - & x-y |
| Trabelsi et al. [60] | 5-ph. PMSM | SB | Yes | Yes | Yes | Yes | Yes | Ph./sw. | Yes | No | Ph., - & x-y |
| Gonçalves et al. [61] | Asym. 6-ph. PMSM | SB | Yes | Yes | Yes | Yes | Yes | Phase | Yes | No | x-y |
| Gonçalves et al. [62] | Asym. 6-ph. PMSM | SB | Yes | Yes | Yes | Yes | Yes | Phase | Yes | High-resistance | x-y |
| Moraes et al. [75] | Series Sym. 6-ph. PMSMs | SB | Yes | Yes | Yes | Yes | Yes | Ph./sw. | Yes | No | - |
| Wang et al. [15] | T-type VSC, As. 6-ph. PMSM | SB | No | No * | No | Yes | Yes | Ph./sw. | Yes | Switch SC | x-y |
| Guo et al. [18] | Sym. 6-ph. PMSM | SB | Yes | Yes | Yes | Yes | Yes | Switch | Yes | No | - & x-y |
| Wang et al. [72] | Asym. 6-ph. PMSM | SB | Yes | No * | Yes | Yes | Yes | Ph./sw. | Yes | Various sensors | x-y & ph. |
| Salas-Biedma et al. [74] | 5-ph. IM | SB | Yes | Yes | Yes | Yes | No | Ph./sw. | Yes | High-resistance | - & x-y |
| Entrambasaguas et al. [73] | Asym. 6-ph. IM | SB | Yes | Yes | Yes | Yes | Yes | Phase | No | No | - & x-y |
| Type of Control (VSD, Controller, Current References, etc.) | Section | Table | References |
|---|---|---|---|
| Using n-dimensional VSD | 3.1.1 | 4 | Many |
| Using reduced-order VSD | 3.1.2 | 4 | Many |
| Using multiple three-phase VSD | 3.1.3 | 4 | [67,69,70,92,94,95,96,97,99,100,101,114,222,244,245,253] |
| V/f control | 3.2 | 5 | [76,77,226,228,229,230,231,249,274,275] |
| DTC based on hysteresis and LUTs | 3.3.1 | 6 | [74,78,79,80,81,82,83,258] |
| DTC based on FCS-MPC | 3.3.2 | 6 | [84,86] |
| DTC based on PI + predictive control + PWM | 3.3.3 | 6 | [12,13,72,85,87] |
| DTC based on FCS-MPC + PWM | 3.3.4 | 6 | [88] |
| DFC | 3.3.5 | 6 | [91,92] |
| RFOC based on current - PI control without x-y control using full-order VSD | 3.4.1.1 | 7 | [19,89,90,93,255] |
| RFOC based on multiple l-phase current d-q PI control | 3.4.1.2 | 7 | [67,69,70,94,95,96,97,99,114,222,244,253,260] |
| RFOC based on current - PI control using reduced-order VSD | 3.4.1.3 | 7 | [98,102,103,104,105,106,107,108,109,110,111,112,113,115,116,117,118,119,120,121,122,123,124,208,221] |
| RFOC based on current dual-PI or PR control using full-order VSD | 3.4.1.4 | 7 | [5,17,20,21,22,23,24,25,80,81,125,126,127,128,129,130,131,132,133,134,135,136,137,138,139,140,227,232,233,234,237] |
| RFOC based on current d-q PI control per plane using full-order VSD | 3.4.1.5 | 7 | [141,142,143,144,145,146,224,237,238,239] |
| RFOC based on current - PI and x-y stationary PI control using full-order VSD | 3.4.1.6 | 7 | [15,147,162,225] |
| RFOC based on current per-phase PI or PR control | 3.4.1.7 | 7 | [63,66,148,149,150,151,152,153,154,155,156,157,242] |
| RFOC based on current FCS-MPC | 3.4.2 | 8 | [9,64,65,71,73,80,134,158,159,160,161,163,164,165,166,167,168,169,256,257] |
| RFOC based on current deadbeat control | 3.4.3 | 9 | [14,16,170,171,172,210,259] |
| RFOC based on current hysteresis control | 3.4.4 | − | [81,173,174,175,176,177,178,179,201,240,241,260] |
| RFOC based on current sliding-mode control | 3.4.5 | 10 | [181,182,183,184,185,186] |
| RFOC based on current fuzzy-logic control | 3.4.6 | 11 | [185,254] |
| RFOC generation of current references with sinusoidally distributed windings | 3.5.1 | 12; 13 | Many |
| RFOC generation of current references considering space harmonics | 3.5.2 | 14 | [98,107,109,118,119,121,122,133,143,144,148,150,152,153,154,156,176,177,178,179,180,181,182,183,199,200,201,202,203,204,209,219,240,241,242,243,251,252] |
| RFOC generation of current references using an adaptive outer loop | 3.5.3 | 15 | [67,68,69,105,106,185,186,219,253] |
| Control with reconfigurationless tolerance to phase OCs | 3.6 | 16 | [19,73,74,219,220,253,254,255,256,258,259] |
| VSD Transform | VSD Reconfiguration | Machine Model Change * | Coupling between Subspaces | Current Reference Reconfiguration | Current Controller Reconfiguration | ||
|---|---|---|---|---|---|---|---|
| Prefault | Postfault | 3-ph. Module Off | 1 Phase OC | ||||
| n-dimensional | None | None | Low/none | Complex | Complex | Complex | Simple/none |
| Reduced-order | Complex | Complex/none | − | Complex/none | Complex/none | Complex/none | Complex/none |
| Multiple 3-phase | None | None | Complex | Complex (simple change) | Very simple | Very complex | Simple/very simple |
| References | Machine | Postfault Reconfiguration | ||
|---|---|---|---|---|
| WSA | Rotor | |||
| Abdel-Khalik et al. [76,226,229,230] | 6 | Asym. | IM | References for closed-loop x-y current control |
| Melo et al. [228] | 6 | Asym. | IM | Voltage FF |
| Melo et al. [249] | 6 | Asym. | IM | Open-loop voltage references |
| Paredes et al. [77] | 6 | No-ph. | IM | Disable 3-phase set |
| Abdel-Khalik et al. [231] | 9 | Asym. | IM | Disable 3-phase set |
| References | Machine | Number of VSC Levels | Type of Control | Postfault Reconfiguration | ||
|---|---|---|---|---|---|---|
| n | WSA | Rotor | ||||
| Zhou et al. [78] | 6 | Sym. | PMSM | 2 | Hysteresis DTC | VSD & LUT |
| Bermudez et al. [79] | 5 | Sym. | IM | 2 | Hysteresis DTC | VSD & LUT |
| Barrero et al. [74,258] | 5 | Sym. | IM | 2 | Hysteresis DTC | None |
| Chikondra et al. [82] | 5 | Sym. | IM | 2 | Hysteresis DTC | VSD & LUT |
| Zhou et al. [83] | 5 | Sym. | PMSM | 2 | Hysteresis DTC | VSD, LUT, & disturbance observer |
| Zhou et al. [84] | 3,6 | Sym. | PMSM | 2 | FCS-MPC DTC | Machine model for flux prediction |
| Huang et al. [86] | 5 | Sym. | PMSM | 2 | FCS-MPC DTC | VSD, SV preselection, & x-y current refs. |
| Zhang et al. [85] | 5 | Sym. | PMSM | 2 | PI + pred. + SV PWM DTC | PWM |
| Zhou et al. [87] | 5 | Sym. | PMSM | 2 | PI + pred. + SV PWM DTC | VSD & voltage FF |
| Wang et al. [12] | 6 | Asym. | PMSM | 3 | PI + pred. + SV PWM DTC | FF (phase OC) or PWM (switch OC) |
| Wang et al. [13] | 6 | Asym. | PMSM | 3 | PI + pred. + SV PWM DTC | FF (phase OC) or PWM (switch OCs) |
| Wang et al. [72] | 6 | Asym. | PMSM | 3 | PI + pred. + SV PWM DTC | FF (phase OC) |
| Huang et al. [88] | 5 | Sym. | PMSM | 2 | FCS-MPC + SV PWM DTC | VSD, SV preselection, & x-y current refs. |
| Bojoi et al. [91] | 6 | Asym. | IM | 2 | PWM DFC | Disable 3-phase set |
| Rubino et al. [92] | 6 | Asym. | IM | 2 | Deadbeat + PWM DFC | Disable 3-phase set |
| References | Machine | No. ph. OCs | Postfault VSD Transform | Postfault Current Control | Space Harmonics | Salient | Postfault Reconfiguration (Besides PI/PR Control) | |||
|---|---|---|---|---|---|---|---|---|---|---|
| n | WSA | Rotor | PI | PR/Dual-PI * | ||||||
| Che et al. [89] | 6 | Sym. | IM | 1 | Full | - | No | 1 | No | Voltage FF |
| Liu et al. [90] | 5 | Sym. | PMSM | 1 | Full | - | No | 1 | No | SV PWM |
| Chen et al. [93] | 5 | Sym. | PMSM | 1,2 | Full | - | No | 1 | No | SV PWM |
| Gonzalez-Prieto et al. [19,255] | 6 | Asym. | IM | 1,2 | Full | - | No | 1 | No | None (not control either) |
| [67,69,70,94,95,244] | Any | Any | Any | 3,6 | Mult. 3-ph. | Mult. d-q | No | 1 | No/yes | Disable 3-phase set |
| Jiang et al. Jiang2019TIE | 6 | Sym. | PMSM | 3 | Mult. 3-ph. | Mult. d-q | No | 1 | No | Drive topology |
| Jung et al. Jung2012TIA | 9 | Sym. | PMSM | 3 | Mult. 3-ph. | Mult. d-q | No | 1 | No | Disable 3-phase set |
| Rubino et al. [97] | 9 | Asym. | IM | 3 | Mult. 3-ph. | Mult. d-q | No | 1 | No | Disable 3-phase set |
| Kuang et al. [260] | 15 | Asym. | PMSM | 1 | Mult. 5-ph. | Mult. d-q | No | 1 | No | None (not control either) |
| Xu et al. [253] | 6 | Sym. | PMSM | 1,2 | Mult. 3-ph. | Mult. d-q | No | 1 | No | None (not control either) |
| Shamsi-Nejad et al. [99] | 6 | No-ph. | PMSM | 1,3 | Mult. 3-ph. | Mult. d-q | No | 1 | No | Current references |
| Li et al. [114] | 6 | Asym. | PMSM | 1,3 | Mult. 3-ph. | No | Mult. - | 1 | Yes | Current references |
| Souza et al. [102] | 9 | Sym. | IM | 1-3 | Reduced | - | No | 1 | No | VSD & voltage FF |
| Ryu et al. [110] | 5 | Sym. | PMSM | 1 | Reduced | - & x | No | 1 | Yes | VSD, v FF, & i refs. |
| Zhou et al. [103] | 5 | Sym. | PMSM | 1 | Reduced | - & x | No | 1 | No | VSD |
| Chen et al. [104] | 5 | Sym. | PMSM | 2 | Reduced | - | No | 1 | No | VSD |
| Priestley et al. [111] | 5 | Sym. | PMSM | 1 | Reduced | - & x-y | No | 1,3 | Yes | VSD |
| Fan et al. [112] | 5 | Sym. | PMSM | 1 | Reduced | - & x-y | No | 1 | No | VSD |
| Tian et al. [105] | 5 | Sym. | PMSM | 1 | Reduced | - & x | No | 1,3 | Yes | VSD & i refs. |
| Tian et al. [106] | 5 | Sym. | PMSM | 2 | Reduced | - | - | 1,3 | Yes | VSD |
| Liu et al. [107] | 5 | Sym. | PMSM | 1,2 | 2 reduced | - (& x) | No | 1,3 | Yes | VSD & i refs. |
| Tian et al. [108] | 5 | Sym. | PMSM | 2 | Reduced | - | - | 1,3 | Yes | VSD, v FF, & PWM |
| Tian et al. [109] | 5 | Sym. | PMSM | 1 | Reduced | - & x | - & x | 1,3 | Yes | VSD, v FF, & i refs. |
| Cheng et al. [115] | 5 | Sym. | PMSM | 1 | Reduced | - & x | No | 1,3 | No | VSD, v FF, & i refs. |
| Xu et al. [113] | 5 | − | IM | 1 | Reduced | - & x | No | 1,3 | No | VSD, v FF, & i refs. |
| Kong et al. [98] | 5 | Sym. | IM | 1 | Reduced | - & x-y | No | 1,3 | No | VSD & i refs. |
| Hu et al. [117] | 6 | Asym. | PMSM | 1 | Reduced | - & x | x | 1 | Yes | VSD & voltage FF |
| Hu et al. [116] | 6 | Asym. | PMSM | 1 | Reduced | - & x | x | 1 | − | VSD, v FF, & i refs. |
| Xiong et al. [118] | 5 | Sym. | PMSM | 1 | Reduced | - & x | - & x | 1,3 | No | VSD & i refs. |
| Xiong et al. [119] | 5 | Sym. | PMSM | 2 | Reduced | - | - | 1,3 | No | VSD & i refs. |
| Liang et al. [221] | 6 | No-ph. | PMSM | 1 | Reduced | - & x-y | - & x-y | 1,3 | No | VSD, v FF, PWM, i refs., & drive |
| Geng et al. [120] | 6 | Asym. | IM | 1-3 | Reduced | - | x | 1 | No | VSD |
| Qiu-Liang et al. [121] | 5 | Sym. | PMSM | 1 | 2 reduced | 3 per VSD | No | 1,3 | No | VSD & i refs. |
| Vu et al. [122] | 7 | Sym. | PMSM | 1 | 2 reduced | 5 per VSD | No | 1,3,9 | No | VSD |
| Chen et al. [124] | 5 | Sym. | PMSM | 1,2 | Reduced | - (& x) | No | 1 | Yes | VSD & i refs. |
| Chen et al. [123] | 5 | Sym. | PMSM | 1,2 | Reduced | - (& x) | No | 1 | Yes | VSD & SV PWM |
| Eldeeb et al. [25] | 6 | Asym. | PMSM | 1 | Full | - | - & x-y | 1-13 | Yes | Current references |
| [5,17,21,22,23,24,125,126,127,128,129,130,131,132,227,232,233,234] | Any | Any | Any | Any | Full | No | - & x-y | Any | No/yes | Current references |
| [20,80,81,133,134,135,136,137,138,139,140,237] | Any | Any | Any | Any | Full | - | x-y | Any | No/yes | Current references |
| Duran et al. [237,238,239] | 6 | Asym. | IM | 3 | Full | - & x-y | No | 1 | No | Current references |
| Zoric et al. [141] | 9 | Asym. | IM | 3,6 | Full | - & x-y | No | 1,29,31 | No | Current references |
| Sala et al. [142] | 12 | Asym. | IM | 3 | Full | - & x-y | No | 1 | No | Current references |
| Locment/Vu et al. [143,144] | 7 | Sym. | PMSM | 1,2 | Full | - & x-y | No | 1,3,9 | No | Current references |
| Feng et al. [145,146] | 6 | Asym | PMSM | 1 | Full | - & x-y | No | Any | No/yes | Current references |
| Hu et al. [224] | 6 | Asym. | PMSM | 1 | Full | - & x-y | No | 1 | No | Drive topology |
| Baudart et al. [162] | 6 | Sym. | PMSM | 1 | Full | - & x-y | No | 1 | No | i refs. |
| Jing et al. [225] | 6 | Asym. | PMSM | 1 | Full | - & x-y | No | 1 | Yes | Drive topology |
| Li et al. [147] | 6 | No-ph. | PMSM | 1,2 | Full | - & x-y | - | 1 | No | Voltage FF |
| Wang et al. [15] | 6 | Asym. | PMSM | 1 | Full | - & x-y | No | 1 | No | SV PWM |
| Wang et al. [15] | 6 | Asym. | PMSM | 1 | Full | - & x-y | No | 1 | No | VSD & i refs. |
| [148,149,150] | Any | Any | Any | Any | None | Per phase | No | Any | No/yes | Current references |
| [63,152,153,154,155,242] | Any | Any | Any | Any | None | No | Per phase | Any | No/yes | Current references |
| Kong et al. [156] | 5 | Sym. | IM | 1,2 | None | Per phase | Per phase | 1,3 | No | Current references |
| References | Machine | No. VSC Levels | Fixed Switch. Freq. | SVs Applied per Sampl. Period | Minimized Error in Cost Function | Postfault Reconfiguration * | ||
|---|---|---|---|---|---|---|---|---|
| n | WSA | Rotor | ||||||
| Pham et al. [158] | 5 | Sym. | PMSM | 3 | No | 1 | Torque & VSD curr. | Current references |
| Duran et al. [9,71,134,163] | 5 | Sym. | IM | 2 | No | 1 | VSD currents | VSD & current refs. |
| Liu et al. [159] | 5 | Sym. | PMSM | 2 | No | 1 | VSD currents | VSD |
| Luo & Liu [165] | 6 | Asym. | PMSM | 2 | No | 1 | VSD currents | Predicted SVs & current refs. |
| Lu et al. [161] | 6 | Asym. | PMSM | 2 | No | 1 | Phase currents | VSD & current refs. |
| Lu et al. [164] | 6 | Asym. | PMSM | 2 | No | 2 | Phase currents | Per-phase machine model & current refs. |
| Salehifar et al. [64] | 5 | Sym. | PMSM | 2 | No | 1 | VSD voltages | Per-phase machine model & current refs. |
| Salehifar et al. [65] | 5 | Sym. | PMSM | 2 | No | 1 | Phase currents | Per-line machine model & current refs. |
| Huang et al. [160] | 5 | Sym. | PMSM | 2 | No | 2 | VSD currents | VSD & current refs. |
| Gonzalez-Prieto et al. [73,256,257] | 6 | Asym. | IM | 2 | No | 2 | - current | None |
| Tao et al. [166] | 5 | Sym. | PMSM | 2 | No | 2 | - current | VSD & virtual SVs |
| Tao et al. [167] | 5 | Sym. | PMSM | 2 | Yes | 5 | - current | VSD, virtual SVs, & back-EMF compensation |
| References | Machine | Number of VSC Levels | Fixed Switching Frequency | SVs Applied per Sampl. Period | Machine Model Reference Frame | Postfault Reconfiguration | ||
|---|---|---|---|---|---|---|---|---|
| n | WSA | Rotor | ||||||
| Arashloo et al. [170] | 5 | Sym. | PMSM | 2 | Yes | − | - & x-y synchronous frames | Machine model & current refs. |
| Lu et al. [171] | 6 | Asym. | PMSM | 2 | Yes | * | Per-phase stationary frame | Machine model & current refs. |
| Ye et al. [172] | 6 | Asym. | PMSM | 2 | Yes | * | Per-line stationary frame | Machine model & current refs. |
| Wang et al. [259] | 6 | Asym. | PMSM | 2 | Yes | − | x-y stationary frame | None |
| Wang et al. [14] | 6 | Asym. | PMSM | 3 | No | 1 | - synchr. & x-y stat. frames | SV regions & current refs. |
| Wang et al. [16] | 6 | Asym. | PMSM | 2 | Yes | − | - synchr. & x-y stat. frames | Current references |
| References | Machine | Type of Current Sliding-Mode Control | Reference Frame of Current Sliding Mode | Postfault Reconfiguration | ||
|---|---|---|---|---|---|---|
| n | WSA | Rotor | ||||
| Mekri et al. [181,182,183] | 5 | Sym. | PMSM | Second-order sliding mode | - & x-y synchr. | Current references |
| Fnaiech et al. [185] | 6 | Sym. | IM | Linear feedback with switched gains | - synchronous | VSD |
| Betin et al. [186] | 6 | Sym. | IM | Linear fdbk. with switched gains & time-varying switching line | - synchronous | VSD |
| Tian et al. [184] | 5 | Sym. | PMSM | Saturation function | - synchr. & x stat. * | VSD & current refs. |
| References | Machine | Inputs of Fuzzy Logic | Operations at Output of Fuzzy Logic | Reference Frame of Current Fuzzy Logic | Other Current Controllers | Postfault Reconfiguration | ||
|---|---|---|---|---|---|---|---|---|
| n | WSA | Rotor | ||||||
| Fnaiech et al. [185] | 6 | Sym. | IM | Error and its derivative | Gain and integration | - synchronous | No | VSD |
| Liu et al. [254] | 9 | Sym. | IM | Error and its integration | Gain | - synchronous | x-y PI | None |
| References | Type of Method | Injects Current Harmonics | Mini-Mizes Losses | Maxi-Mizes DF | Constraints in Optimization (Besides OCs) * | Opti-Mizes |
|---|---|---|---|---|---|---|
| [6,9,16,18,20,21,81,86,87,88,89,113,114,115,116,124,126,127,128,129,134,135,136,137,162,163,164,165,189,190,191,192,207,220,225,232,233,234,248] | MLS | No | SCL | No | No | No |
| Shawier et al. [125] | MLS | No | Rotor, core, and SCL | No | No | No |
| Wang et al. [16] | MLS | Yes | SCL | No | No | No |
| Wang/Shamsi-Nejad et al. [99,100] | MLS | Yes | SCL | No | Predef. currents | No |
| Liang/Kuang et al. [221,260] | MLS | No | SCL | No | Predef. currents | No |
| [6,9,20,21,81,87,88,89,90,110,111,112,113,114,115,116,124,125,126,127,128,129,133,134,135,136,137,138,149,163,164,168,174,175,187,188,189,192,194,195,196,197,198,199,207,209,215,216,220,227,232,233,234,235,236,237] | MTS | No | No | Yes | No | No |
| Wang et al. [100] | MTS | Yes | No | Yes | Predef. currents | No |
| Liang/Kuang et al. [221,260] | MTS | No | No | Yes | Predef. currents | No |
| Duran/Wang et al. [100,135,163] | Switch MLS/MTS | No | SCL(not at ↑ torque) | Yes | No | No |
| [5,22,23,24,116,128,129,130,131,137,138,223,227,234] | FRMLS | No | SCL | Yes | T1 | No |
| Sun et al. [17] | FRMLS | dc | SCL | Yes | T1 | No |
| Baneira et al. [126,127] | FRMLS | No | VSC and SCL | Yes | T1 | No |
| Shawier et al. [125] | FRMLS | No | Rotor, core, and SCL | Yes | T1 | No |
| Gonzalez-Prieto et al. [239] | FRMLS | No | Rotor, core, and SCL | Yes | T1 | Yes |
| Eldeeb et al. [25] | FRMLS | No | SCL | Yes | T1 & | Yes |
| Feng et al. [145] | Other | Yes | No | Yes | Predef. currents | No |
| Feng et al. [146] | Other | No | No | Yes | Predef. currents | Yes |
| Feng et al. [217] | Other | Yes | No | Yes | Predef. currents | Yes |
| References | Machine | Includes Current Limit | Includes Voltage Limit | Includes Flux Saturation | Includes x-y Current DOFs | Complexity of Offline Optimization | Postfault Reconfiguration | ||
|---|---|---|---|---|---|---|---|---|---|
| n | WSA | Rotor | |||||||
| Gonzalez-Prieto et al. [239] | 6 | Asym. | IM | Yes | No | Yes | Partially | High | Yes |
| Gonzalez-Prieto et al. [257] | 6 | Asym. | IM | No | No | No | No | Very low | No |
| Eldeeb et al. [25] | 6 | Asym. | PMSM | Yes | Yes | Yes | Yes | Very high | Yes |
| Feng et al. [146,217] | 6 | Asym. | PMSM | No | No | Yes | Partially | Very high | Yes |
| References | Machine | VSD | Type of Method | Space Harmonics * | Injects Current Harms | Mini-Mizes Losses | Thresholds as Constraints in Optimization † | ||
|---|---|---|---|---|---|---|---|---|---|
| n | WSA | Rotor | |||||||
| Tani/He et al. [133,150] | 7 | Sym. | IM | Full | Circular in all planes | 1,3,5 | 1 | Rotor & SCL | No |
| Locment et al. [143] | 7 | Sym. | PMSM | Full | Circular , in 2 resp. planes | 1,3 | 1,3 | SCL | No |
| Cervone et al. [243] | 7 | Sym. | PMSM | Reduced | Circular , in 2 resp. planes | 1,3 | 1,3 | SCL | No |
| Vu et al. [122] | 7 | Sym. | PMSM | Reduced | Null | 1,3,9 | 1,3 | No | No |
| Huang et al. [199] | 5 | Sym. | PMSM | None | Unbalanced | 1,3,5 | 1 | No | No |
| Huang et al. [199] | 5 | Sym. | PMSM | None | Equal-amplitude , sets | 1,3,5 | 1,3 | No | No |
| Bianchi et al. [200,201,209] | 5 | Sym. | PMSM | None | Cancel 2nd & 4th T ripple | 1,3 | 1,3 | No | No |
| Dwari et al. [176] | 5 | Sym. | PMSM | None | Cancel 2nd, 4th, & 6th T ripple | 1,3 | 1,3 | No | No |
| Mohammadpour et al. [240] | 5 | Sym. | PMSM | None | Cancel 2nd, 4th, & 6th T ripple | 1,3 | 1,3 | SCL | No |
| Liu et al. [107] | 5 | Sym. | PMSM | 2 reduced | Cancel 2nd & 4th T ripple | 1,3 | 1,3 | SCL | No |
| Liu et al. [107] | 5 | Sym. | PMSM | 2 reduced | Cancel 2nd & 4th T ripple | 1,3 | 1,3 | No | No |
| Xiong et al. [118] | 5 | Sym. | PMSM | Reduced | Cancel 2nd, 4th, & 6th | 1,3 | 1,3 | SCL | No |
| Xiong et al. [118] | 5 | Sym. | PMSM | Reduced | Cancel 2nd, 4th, & 6th | 1,3 | 1,3 | No | No |
| Tian et al. [109] | 5 | Sym. | PMSM | Reduced | Cancel 2nd & 4th T ripple | 1,3 | 1,3 | SCL | No |
| Qiu-Liang et al. [121] | 5 | Sym. | PMSM | Reduced | Cancel 2nd & 4th T ripple | 1,3 | 1,3 | No | No |
| Kong et al. [156] | 5 | Sym. | IM | Full | Avoid backwards SVs | 1,3 | 1,3 | No | No |
| He et al. [152] | 5 | Sym. | IM | Full | Circular in - | 1,3 | 1,3 | No | No |
| Liu et al. [154] | 5 | Sym. | IM | Full | Circular , in 2 resp. planes | 1,3 | 1,3 | No | No |
| Kong et al. [98] | 5 | Sym. | IM | Reduced | Cancel 2nd, 4th, & 6th T ripple | 1,3 | 1,3 | No | No |
| [177,178,179,180,181,182,183,202,219,241,242,252] | Any | Any | PMSM | None | Constant T in (2) | Any | Any | SCL | No |
| Wang et al. [148,153,203,251] | Any | Any | PMSM | None | Constant T in (2) & field-wk. | Any | Any | SCL(not in field-wk.) | No |
| Lee et al. [204] | Any | Any | PMSM | − | Reduce unbalanced forces | Any | Any | SCL | No |
| Vu et al. [144] | 7 | Sym. | PMSM | Reduced | Maximize DF per speed | 1,3 | 1,3 | No | |
| Xiong et al. [119] | 5 | Sym. | PMSM | Reduced | Full-range low T ripple | 1,3 | 1,3 | Yes | T1 |
| References | Machine | Outer Control Loop | Space Harmo-Nics | Adaptive Current References | Postfault Reconfiguration | ||
|---|---|---|---|---|---|---|---|
| n | WSA | Rotor | |||||
| Fnaiech/Betin et al. [185,186] | 6 | Sym. | IM | Position sliding mode | 1 | VSD | |
| Lin et al. [69] | 6 | Asym. | PMSM | Position RFNCMAN | 1 | Disable 3-ph. set | |
| Lin et al. [67] | 6 | Asym. | PMSM | Speed TSKFNN-AMF | 1 | Disable 3-ph. set | |
| Lin et al. [68] | 6 | Asym. | PMSM | Speed sliding mode & TSKFNN-AMF | 1 | Disable 3-ph. set | |
| Tian et al. [105,106] | 6 | Sym. | PMSM | Speed sliding mode | 1,3 | VSD & x current ref. * | |
| Mohammadpour et al. [219] | 5 | Sym. | PMSM | Torque iterative learning | 1,3 | Per phase | None |
| Guo et al. [220] | 10 | Sym. | PMSM | Speed robust control law | 1 | None | |
| Xu et al. [253] | 6 | Sym. | PMSM | Speed robust control law | 1 | None | |
| References | Method Description | Machine | Other Details | |||
|---|---|---|---|---|---|---|
| n | WSA | Rotor | Section | Table | ||
| Mohammadpour et al. [219] | RFOC with torque iterative-learning control | 5 | Sym. | PMSM | 3.5.3 | 15 |
| Guo et al. [220] | RFOC with speed robust control law | 10 | Sym. | PMSM | 3.5.3 | 15 |
| Xu et al. [253] | RFOC with speed robust control law | 6 | Sym. | PMSM | 3.4.1.2; 3.5.3 | 7; 15 |
| Liu et al. [254] | RFOC with - fuzzy-logic i control | 9 | Sym. | IM | 3.4.6 | 11 |
| Gonzalez-Prieto et al. [255] | RFOC with - PI & no x-y closed-loop i control | 6 | Asym. | IM | 3.4.1.1 | 7 |
| Gonzalez-Prieto et al. [256,257] | RFOC with - FCS-MPC & no x-y closed-loop i control & virtual SVs | 6 | Asym. | IM | 3.4.2 | 8 |
| Barrero et al. [258] | - DTC & no x-y closed-loop i control & virtual SVs | 5 | Sym. | IM | 3.3.1 | 6 |
| Wang et al. [259] | RFOC with - PI & x-y deadbeat i control & phase-locked loop | 6 | Asym. | PMSM | 3.4.3 | 9 |
| Entrambasaguas et al. [73] | [256] + derating by single-index fault detection | 6 | Asym. | IM | 2.3; 3.4.2 | 2; 8 |
| Gonzalez-Prieto et al. [19] | [255] + automatic derating | 6 | Asym. | IM | 3.4.1.1 | 7 |
| Configuration | Healthy SCL | DC-Link Utilization | DF under Phase OCs |
|---|---|---|---|
| Isolated neutral points | Low | High | Low |
| Connected neutral points | High | Low | High |
| WSA | DC-Link Utilization | DF under Phase OCs |
|---|---|---|
| Symmetrical | Low | Very high |
| Asymmetrical | Low | High |
| No-phase-shift | High | Low |
| Multisector | High | Low |
| Parameter | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DF under line OC (%) | 72.34 | 76.05 | 77.12 | 89.81 | 81.22 | 95.56 | 86.29 | 98.39 | 89.22 | 95.85 | 90.2 | 96.83 | 91.07 | 97.9 | 92.44 | 98.68 |
| Dc-link voltage (%) * | 95.11 | 80.90 | 100 | 100 | 97.49 | 112.3 | 98.48 | 144 | 98.98 | 91.54 | 100 | 100 | 99.27 | 106.8 | 99.45 | 122.3 |
| Line-current rating (%) | 100.0 | 138.6 | 100.0 | 144.5 | 100.0 | 149.2 | 100.0 | 109.6 | 100.0 | 153.7 | 100.0 | 154.2 | 100.0 | 138.9 | 100.0 | 123.6 |
| Type of Drive Reconfiguration | Section | References |
|---|---|---|
| Replacement by redundant switches or legs | 4.2.1 | [264,337] |
| Connection of stator neutral point(s) to dc-link midpoint | 4.2.2 | [264,337] |
| Connection of stator neutral point(s) to VSC leg(s) | 4.2.3 | [221,222,228] |
| Switch between one or several neutral points | 4.2.4 | [25,223] |
| Combined rearrangement of neutral points and neutral connections to VSC legs | 4.2.5 | [261] |
| Switch between single n-leg FB and dual n-leg HB VSCs | 4.2.6 | [262] |
| Switch between phases open or clamped to dc-link midpoint | 4.2.7 | [24] |
| Sharing a VSC leg between two phases | 4.2.8 | [224,225] |
| Switch types of stator phase connections | 4.2.9 | [226] |
| Switch order of VSC-machine connections | 4.2.10 | [23] |
| No. of Phases with Faulty IGBTs | ||||||
|---|---|---|---|---|---|---|
| Total | Winding 1 | Winding 2 | Neutrals | No. of Phases Clamped to O | Neutrals | No. of Phases Clamped to O |
| 0 | 0 | 0 | 2N | 0 | 2N | 0 |
| 1 | 1 | 0 | 2N | 1 | 1N | 0 |
| 2 | 1 | 1 | 2N | 2 | 1N | 0 |
| 2 | 2 | 0 | 1N | 1 | 1N | 0 |
| 3 | 2 | 1 | 2N | 2 | 1N | 0 |
| 3 | 3 | 0 | 1N | 1 | 1N | 0 |
| 4 | 2 | 2 | 2N | 2 | − | − |
| 4 | 3 | 1 | 1N/2N | 1 | − | − |
| >4 | Any | Any | − | − | − | − |
| n | Original | Target | |
|---|---|---|---|
| 0 | 5–7 | 1 | 2 |
| 0 | 8–10 | 1 | 3 |
| 1 | 5, 8–9 | 1 | 2 |
| 1 | 6 | 1,3 | 2 |
| 1 | 7 | 1,3 | 2 |
| 2 | 11 | 2,5 | ≠2,5 |
| 2 | 12–14 | 2 | ≠2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yepes, A.G.; Gonzalez-Prieto, I.; Lopez, O.; Duran, M.J.; Doval-Gandoy, J. A Comprehensive Survey on Fault Tolerance in Multiphase AC Drives, Part 2: Phase and Switch Open-Circuit Faults. Machines 2022, 10, 221. https://doi.org/10.3390/machines10030221
Yepes AG, Gonzalez-Prieto I, Lopez O, Duran MJ, Doval-Gandoy J. A Comprehensive Survey on Fault Tolerance in Multiphase AC Drives, Part 2: Phase and Switch Open-Circuit Faults. Machines. 2022; 10(3):221. https://doi.org/10.3390/machines10030221
Chicago/Turabian StyleYepes, Alejandro G., Ignacio Gonzalez-Prieto, Oscar Lopez, Mario J. Duran, and Jesus Doval-Gandoy. 2022. "A Comprehensive Survey on Fault Tolerance in Multiphase AC Drives, Part 2: Phase and Switch Open-Circuit Faults" Machines 10, no. 3: 221. https://doi.org/10.3390/machines10030221