
Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles




1
Intelligent Robotic and Energy Systems Research Group, Faculty of Engineering and Design, Carleton University, Ottawa, ON K1S 5B6, Canada
2
Department of Electrical and Computer Engineering, Texas Tech University, Lubbock, TX 79409, USA
*
Author to whom correspondence should be addressed.
Machines 2023, 11(7), 713; https://doi.org/10.3390/machines11070713
Submission received: 7 June 2023
/
Revised: 30 June 2023
/
Accepted: 3 July 2023
/
Published: 5 July 2023
(This article belongs to the Special Issue Advanced Control of Electric Machines and Sustainable Energy Systems)
Abstract
:Fault detection and diagnosis (FDD) is of utmost importance in ensuring the safety and reliability of electric vehicles (EVs). The EV’s power train and energy storage, namely the electric motor drive and battery system, are critical components that are susceptible to different types of faults. Failure to detect and address these faults in a timely manner can lead to EV malfunctions and potentially catastrophic accidents. In the realm of EV applications, Permanent Magnet Synchronous Motors (PMSMs) and lithium-ion battery packs have garnered significant attention. Consequently, fault detection methods for PMSMs and their drives, as well as for lithium-ion battery packs, have become a prominent area of research. An effective FDD approach must possess qualities such as accuracy, speed, sensitivity, and cost-effectiveness. Traditional FDD techniques include model-based and signal-based methods. However, data-driven approaches, including machine learning-based methods, have recently gained traction due to their promising capabilities in fault detection. This paper aims to provide a comprehensive overview of potential faults in EV motor drives and battery systems, while also reviewing the latest state-of-the-art research in EV fault detection. The information presented herein can serve as a valuable reference for future endeavors in this field.
1. Introduction
Electrified transportation is one of the main strategies to reduce carbon emissions contributing to climate change and global warming. Additionally, limited fossil fuel sources and instability in countries producing fossil fuels draw attention to electric vehicles (EVs). The number of EVs is rising at a fast pace, and many governments are putting forth legislation to increase the market share of EVs in the next decade. In this regard, the safety and reliability of EVs become critical to gaining a considerable market share. EVs include several components, all of which are prone to different types of faults. However, the electric motor drive and battery system are its core components, and the main faults of an EV usually occur in these components. As a result, the healthy operation of these parts is of high importance and needs precise monitoring.
Electric motors are employed extensively in various industries and are especially utilized as the powertrain of EVs. For the transportation industry, EVs’ reliability and safety are crucial. However, due to their harsh working environment, various types of faults can occur in the motor and its drive system that can degrade system performance and reduce the reliability and safety of EVs. The interior permanent magnet synchronous motor (IPMSM) is the most used in EVs based on high power density and efficiency [1]. On the other hand, as the demand for PMSMs grows and the cost of their materials remains high, designers are forced to optimize their designs, increasing complexity and making the PMSM more vulnerable to different types of faults. At the same time, the transportation industry requires continuity despite the operating environment of EV motors. Electrical motor drive faults may occur in the motor as the main part or in the inverter of the motor drive system, and they can be classified into three main groups: electrical faults, mechanical faults, and sensor faults [2]. Interturn short fault (ITSF), open- or short-phase faults, demagnetization fault and open or short circuits of the switches in the inverter are considered electrical faults. Faults related to the rotor, such as bearing faults, bent shaft and airgap eccentricity, are mechanical faults. Defects in each of the various sensors are referred to as sensor faults. If these faults are discovered early, proper measures can be taken to avoid costly damage and catastrophic failures.
As the energy storage part of EVs, the lithium-ion battery system has taken the lead in EV applications due to its outstanding features, including high power and energy density, long lifespan and environmental factors [3]. A battery pack usually comprises hundreds of cells connected in series and parallel configurations. However, different types of faults, including battery abuse and actuator and sensor faults, may occur in battery systems resulting in battery degradation and accelerated aging, EV failure and dangerous accidents. It is reported that 30% of EV accidents stem from battery faults [4].
Thus, developing reliable online fault detection and fault tolerant control is needed to guarantee safe and continuous EV operation. However, complex operations and other unpredictable factors make early fault detection challenging. Fault detection and diagnosis (FDD) is a technique to monitor and determine the operating state of an electric motor, which allows early fault detection and prediction. With the use of FDD, various faults can be detected and identified, and by taking proper measures, the safety and reliability of EVs increase [5].
Many FDD methods have already been introduced to overcome the risk of potential faults in electric motor drives and battery systems. FDD methods can generally be categorized into model-based, signal-based, data-driven (knowledge-based), and hybrid methods. The model-based methods are based on the difference between the measured and estimated values by the system model and observers. There are different model-based techniques, such as state observer, parameter estimation, extended Kalman filter (EKF), linear parameter varying and finite element analysis (FEA), to name a few [6]. In signal-based methods, the fault symptoms are extracted from the output signals, and there is no need for an accurate system model. The features can be extracted through the time domain, frequency domain or time-frequency domain by analyzing the spectrum, phase, magnitude, deviations, etc. [7]. Some of the feature extraction methods are fast Fourier transform (FFT), Hilbert Huang transform (HHT), Wavelet transform (WT) and Winger Ville [6]. Model-based and signal-based methods need prior motor knowledge, are sensitive to load and are slow at fault detection. Data-driven methods differ from model-based and signal-based methods, as they can be implemented without a pre-existing knowledge of the model or signal pattern of traction systems, which is the main advantage of this type of FDD. A considerable amount of historical data under healthy and faulty conditions are required for the data-driven method to be performed effectively; however, it is not considered an insurmountable challenge. Also, as in this method, the system model is not required; it has more capability to generalize the FDD method to multiphase motors with more complex models and more uncertainties. Some of the primary and most-used approaches in data-driven methods include Hypothesis Test and Test Statistics, Principal Component Analysis (PCA), Independent Component Analysis (ICA), Canonical Correlation Analysis (CCA), Neural Networks (NN), Support Vector Machine (SVM), Bayesian Network (BN), Deep learning and other machine learning methods.
This paper surveys different types of electric motor drives and battery system faults to understand their basis and effects. Different FDD methods are introduced, and recent works and state-of-the-art techniques are reviewed, including their advantages and limitations. Section 2 introduces the different types of faults in the electric motor drive. Section 3 presents the battery system faults. The existing model-based and signal-based FDD methods for PMSM motor drives are studied in Section 4. Section 5 focuses on the data-driven methods, and the battery system FDD methods are reviewed in Section 6.
2. Electric Motor Drive Faults
Three main groups of faults in PMSM motor drives are categorized as electrical, mechanical and sensor faults. These faults may occur in the motor part or the inverter part. Figure 1 shows a diagram of various electric motor drive faults.
2.1. Electrical Faults
The main electrical faults, as noted above, are winding interturn short-circuit faults (ITSF) and open- or short-phase and demagnetization faults, which are related to the motor. Additionally, open circuits or short circuits in switches and DC-link capacitor failures are associated with the inverter.
2.1.1. Interturn Short-Circuit Fault
Breakdown and degradation in the stator turn-to-turn windings insulation of a PMSM are usually due to a power surge, moisture, or mechanical, electrical and thermal stresses, resulting in a short circuit in the windings [8]. This failure is known as the fault (ITSF) and has the highest failure rate among motor faults [9].
As shown in Figure 2, the shorted turns create an additional circuit loop connected to flux linkages created by other motor windings and the rotor magnet. A high-fault current is created in the ITSF windings because of the low impedance and high-coupled flux linkage voltage leading to stator overcurrent and overheating [10,11]. At the early stages of the ITSF, with failure in only a few percentages of turns, the motor can continue to operate with degraded performance. However, the heat produced by the overcurrent can damage the insulation of the nearby turns and expand to the whole phase at a high pace [12] and lead to a phase-to-phase or phase-to-ground short circuit and severe motor failure in a short time with high repair costs. Also, the rotor permanent magnet can potentially be permanently demagnetized by the high fault current in the extra current route [13,14]. Therefore, incipient fault detection becomes critical for ITSF. Usually, the ratio of the shorted turns to the number of turns in a coil is regarded as the severity of ITSF. As the severity increases, the induced back-EMF voltage of the shorted turns rises and subsequently, the short-circuit current rises rapidly, resulting in more system imbalance [15].
2.1.2. Demagnetization Fault
Physical damage, high-temperature operation, aging or an inverse magnetic field can all induce demagnetization, which reduces the strength of the permanent magnet (PM) inside the IPMSM. Also, an ITSF, if not detected and tolerated in time, can result in partial demagnetization due to the induced reverse magnetitic field [16]. Reversible and irreversible demagnetization are the two forms of demagnetization. The former is caused by a field weakening control, whereas the second suffers from permanent demagnetization. An inappropriate operating point of the IPMSM because of the combined influence of temperature and a shift in the permeance curve [17] is a key cause of irreversible demagnetization. If demagnetization happens, it lowers the torque of the PMSM due to the reduced PM flux linkage. Consequently, it negatively impacts the motor’s characteristics and efficiency [18]. The current in demagnetized PMSMs must increase to compensate for the effect of a weakened PM and produce the same torque as a healthy state [19]; nevertheless, this means increasing copper losses and temperature [20]. On the other hand, high temperatures can result in far more severe irreversible demagnetization [21]. Consequently, the reliability and safety of the system would be decreased. Utilizing fault detection and diagnosis technologies is vital to avoid such consequences. Demagnetization fault can result in additional frequency components in stator current and the vibration and result in pulsation in torque and speed. These signatures can be used for demagnetization fault detection [22,23].
2.1.3. Open or Short Switches in the Inverter
Inverters are used in electric motor drive systems as a core component, as shown in Figure 3. Due to the high-frequency operation, high power stresses, aging and other conditions, the switching devices are the components most expected to fail while in use (about 38% of faults in drivers [24]), which commonly appear as a short-circuit or open-circuit failure. Open-circuit faults usually occur because of a gate signal failure or disconnecting of the wire. Such a fault does not stop the drive system from operating [25]. As an open-circuit fault stops the defective phase winding stimulation in a switching device, the system operates in phase-locking mode. As a result, the drive system loses equilibrium, and the rotor is subjected to an imbalanced force, resulting in a considerable reduction in system performance [2] and noticeable vibrations and can end in secondary faults in the motor due to the lack of FDD. Short-circuit faults are usually the result of overvoltage, overheating, breakdown of the protection components or a wrong gate signal [25]. Furthermore, when a power switch is short-circuited, the defective phase winding is constantly stimulated, regardless of the rotor position, and causes instant overcurrent. Consequently, the faulty phase creates a significant, reversed braking torque during its demagnetization period, and the drive system’s stability is significantly damaged, resulting in a subsequent failure of the entire system [26]. In this case, the protective circuits come into effect as an overcurrent is produced immediately, making the inverter shut down; it needs to be repaired to operate again. Hence, identifying and isolating power transistor faults and their locations accurately and quickly is critical for the safe functioning of a PMSM drive.
2.2. Mechanical Faults
Mechanical faults are as important as electrical faults and need in-time detection. The main mechanical faults are bearing faults and air–gap eccentricity. Some other mechanical faults include a bent shaft, damaged magnet and bolt loosening [28].
2.2.1. Bearing Faults
A bearing fault is the most common fault among all possible motor faults, contributing about 40–50% [29]. Bearing faults can be in the inner raceway, outer raceway, cage or ball bearings. The main reasons behind the bearing fault are poor lubrication, mechanical vibrations, shaft misalignment, overload, corrosion and eventually fatigue, even under normal conditions. If the bearing defect is not detected and repaired in time, other forms of faults, such as air–gap eccentricity, ITSF and even complete motor failure, are expected [30]. Figure 1 in [31] illustrates the rolling bearing structure.
2.2.2. Air–Gap Eccentricity Faults
Some mechanical problems, such as unbalanced loads, shaft misalignments, rotor imbalance, missing bolt and bearing faults, result in a rotor eccentricity fault within the motor [28]. In fact, it is the uneven air gap between the stator and rotor and is categorized into three types: static eccentricity (SE), dynamic eccentricity (DE), and mixed eccentricity (ME). SE refers to the condition that the minimum air gap has a fixed value and hardly ever alters with time, mainly caused during the manufacturing stage. DE occurs where the minimum air gap location rotates along with the rotor and is brought on by rotor flaws, worn bearings, and bent shafts. The ME has both SE and DE defects simultaneously [32].
2.3. Sensor Faults
Different types of sensors, including current, voltage, speed, or position sensors, are needed to provide a motor drive control system with different feedback signals. A sensor fault refers to any defect or failure in such sensors which can happen due to vibration, temperature, moisture, etc. [33]. Sensor faults can be open circuits, gain deviation or high noise [34]. If a fault occurs in any of these sensors, incorrect information is fed to the motor’s monitoring and controller system, leading to degraded performance and even complete motor failure. Therefore, fault detection and diagnosis are essential to avoiding such failure and reduced reliability [35].
2.3.1. Current Sensor Faults
At least two current sensors are used to measure the phase currents of a three-phase PMSM. Current sensor faults can be found in three types, zero output, incorrect gain and dc offset, none of which need rapid detection and repair but can lead to reduced efficiency and overheating [2].
2.3.2. Voltage Sensor Faults
If the voltage sensor fault causes a rapid increase in the measured DC-link voltage, it can lead to system failure in a small period. In this situation, fast fault detection and repair are critical. Sometimes a fault can cause slight changes and deviations in the measured value, allowing the motor to operate for some time with reduced performance. Eventually, any fault in the voltage sensor must be detected and tolerated [2].
2.3.3. Speed or Position Sensor Faults
The rotor position and speed are measured by the position and speed sensors in the motor drive to feed the control system. Photoelectric incremental encoders are mostly used for this object. Any fault in this sensor can affect motor functionality. It can result in wrong-direction rotation, reducing the speed from the desired speed to zero, making the motor stop, or, most dangerously, increasing the speed more than desired to the maximum possible motor speed. The last situation results in persistent overload and even catastrophic accidents. As a result, FDD has a crucial role in preventing such conditions [2].
3. Battery System Faults
The potential faults of the battery pack can be classified into three main groups: battery abuse, connection faults, and sensor faults. The occurrence of each of these faults can result in heat generation and, if they are not detected or tolerated in time, can increase the aging speed and even result in thermal runaway and explosion [36]. Figure 4 shows a diagram of battery system faults.
3.1. Battery Abuse Faults
This group of faults contains overcharge, over-discharge, internal short circuit, external short circuit, thermal runaway, etc., which can happen inside the battery. Errors in the battery management systems and cell capacity degradation can result in overcharge and over-discharge faults. These faults can lead to chemical and physical damage to the battery, degrading the battery’s performance and safe operation [37]. The internal short circuit refers to the insulation failure between the layers inside the battery, while the external one notices the shorted positive and negative terminals [38]. An external short circuit is a more dangerous and noticeable fault than an internal short circuit, which is negligible in the early stages. However, the internal short circuit can turn into an intense fault after a while [39]. Rapid voltage drop and thermal runaway are expected when a short circuit occurs.
3.2. Actuator Faults
Connection faults, cooling system faults, controller area network bus faults, etc. belong to this group of faults. Due to the need for a high level of energy in EV applications, the battery system usually consists of many battery cells connected in a parallel–series configuration. Due to the working environment of EV, temperature changes, vibration and aging, the connection can become defective. Loose connections can reduce the available power, resulting in potential accidents. Increasing the resistance of the connection can cause heat production and affect the battery performance [40]. If the cooling system fails, the battery temperature may exceed the allowed temperature range and even lead to thermal runaway, so it is one of the considerable battery faults.
3.3. Sensor Faults
Battery management system (BMS) plays a crucial role in the safe, reliable and effective performance of EVs. This unit is responsible for several tasks, including estimating the state of charge (SOC) and state of health (SOH) of the battery, thermal management, cell balancing, etc., by monitoring the voltage, current and temperature of the cells [41]. In this regard, many current, voltage and temperature sensors are utilized in the battery system. Any defect and fault in these sensors can be reflected in the BMS performance and lead to further faults such as battery abuse faults and significant failures, all of which reduce the battery lifespan and safety.
4. Fault Detection and Diagnosis of Electric Motor Drives
Reliability and safety are always of high priority in every application, but in transportation systems, they are even more critical, as transportation needs continuity and safety, notwithstanding the operating environment of EV motors. As discussed, the electric motor and its drive system are always vulnerable to different types of faults, which inevitably occur [42]. Undetected faults can lead to performance degradation, high repair expenses and even catastrophic accidents. To overcome such risks, increase reliability, avoid unexpected EV stops and high repair costs, and increase safety, FDD is considered in many systems with different applications. FDD is a method of keeping track of motor performance to detect, identify and locate faults as early as possible. FDD provides the opportunity to take proper measures as soon as the fault occurs and tolerate the faults. An FDD technique needs to comply with certain requirements to be considered effective, such as: (i) fast detection time, (ii) robust to varying operating conditions, (iii) sensitive enough but with no false alarm, and (iv) requiring no additional hardware (due to cost and complexity). Selecting the proper fault index plays the most critical role in fault detection. Since the fault can alter a motor’s parameters, utilizing multiparameter fault indicators can improve the detection method’s robustness and accuracy [43]. Figure 5 indicates the overall schematic of the EV motor drive system with FDD and fault-tolerant control.
As indicated in Figure 6, the FDD methods utilized in PMSM motor drives are divided into three main classes: model-based, signal-based (or signal processing) and data-driven [44,45]. Also, in some applications, combining these methods is used to take advantage of different methods simultaneously, referring to hybrid FDD methods. Table 1 indicates a summary of FDD categories.
4.1. Model-Based FDD Methods
Model-based techniques are developed by comparing the measured values with the estimated values produced by the system model. In the first stage, the mathematical model of the motor is used to estimate the expected signal values in a healthy condition. Then, these estimated values are compared with the actual measured signals and the residual signals are generated. The signal (signals) considered for fault detection can differ based on the desired fault type and fault detection methodology. In the second stage of model-based FDD, the residual signals reveal if there is a fault or if the motor is operating in a healthy condition [46,47]. Model-based approaches are fast and effective, but they need an accurate system model, which brings limitations and reduces the efficiency of the FDD method for complex systems with many uncertainties. Furthermore, expert knowledge is needed [48]. There are different model-based techniques [49], such as state observer [50], parameter estimation [51], parity space equations [52], extended Kalman filter (EKF), linear parameter varying, finite element analysis (FEA) and model predictive control (MPC), to name a few. Different types of model-based FDD techniques have been introduced and some of them have been studied as follows. Figure 7 shows general schematic of model-based method where the green cycle is the fault detection unit.
The state-observer method, as one of the most-used techniques with the general diagram shown in Figure 8, is usually divided into two main subgroups: voltage-based observer [54] and current-based observer [55]. The voltage-based methods are fast diagnosis techniques and can be used to increase the fault detection speed, but usually, extra voltage sensors are needed. Consequently, adding voltage sensors increases the system’s cost, volume and complexity, which is regarded as a drawback for FDD techniques [56]. A stator flux linkage (SFL) DC-offset observer is proposed in [57] for stator fault detection. It is analyzed in an antisynchronous reference frame (ASRF) after SFL is estimated in the stator reference frame and transformed into ASRF. This method is simple and is unaffected by operating conditions and stator connection type (delta or star). In [54], a voltage-based observer is utilized for robust open fault detection to estimate the converter voltages and takes advantage of obtaining reference voltage from the control system. In this case, there is no need for extra hardware, reducing the cost of the FDD method. On the other hand, as current sensors are usually utilized for motor control, using current-based observers does not require additional sensors. In [58], a current state observer is used to generate a residual current vector (RCV) by comparing the estimated value with the stator current. To prevent false alarms caused by disturbances, the RCV is separated into different reference frames to accurately detect and measure the severity of interturn short-circuit faults in any stator-phase winding. Also, the electrical angular speed is estimated using the stator voltages, eliminating the need for a speed sensor. Using state observers to detect sensor faults needs robustness to parameter uncertainties and load variation as they can affect the residual signal and cause nonzero values under healthy conditions. Based on the dynamic characteristics of the EV, using adaptive thresholds can noticeably increase the efficiency and performance of the FDD [59,60,61]. It is highly important to design an adaptive threshold to avoid false or missing alarms.
The theory of interval observer has introduced fresh concepts for detecting faults and incorporating them into control. In contrast to the conventional scheme for observer-based fault detection, the interval observer scheme eliminates the need for designing a residual evaluator and threshold selector, reducing computational load. An improved interval observer relying on the established mathematical model of the motor was used in [63], which shows better robustness to electromagnetic perturbation and enables incipient ITSF fault detection.
The Luenberger observer is another effective residual observer gaining attention and improving observer-based FDD techniques. In [64], the Luenberger observer is utilized for encoder fault detection for very low- to high-speed ranges. However, the Luenberger observer has the drawback of sensitivity to motor parameter variations. To overcome the nonlinearity of complex systems, the sliding mode control system is widely utilized, which shows more robustness comparing the Luenberger observer-based methods. The sliding mode observer for fault detection was first introduced and triggered attention [65]. In [66], sliding mode observer parameters are selected using linear matrix inequalities so that the residual signal is affected only by the fault signals. It is used for detecting PMSM demagnetization faults with high accuracy. In [67], a sliding mode observer is used along with an exact differentiator to estimate the PMSM stator resistor for online ITSF fault detection. It needs low tuning effort and is applicable for measurements under noisy conditions.
Parameter estimation is the other model-based technique used for detecting faults. In this technique, different motor and inverter parameters, such as current, voltage, back-EMF, resistance and speed, are estimated based on the system models, and they are considered the expected healthy values or references. Then, these values are compared to the real parameter values acquired online from the system. Deviations from the reference values reveal the fault occurrence. In [68], the estimated DC-link current is used as the reference value and compared with the actual measured value to detect and distinguish single and multiple sensor and nonsensor faults. Also, the phase signal residual is utilized to isolate the detected faults. The suggested technique in [69] utilizes the resistance and inductance obtained from online parameter estimation, along with the second harmonic of control voltage, as fault indicators. In the case of the demagnetization fault, flux linkage is usually considered a fault indicator, and it is mainly estimated based on d-axis and q-axis inductances. However, flux density variations under the demagnetization fault result in PMSM inductance variations that affect the accurate demagnetization fault detection and severity identification. In [70], structural analysis is utilized to estimate the changing inductance values considering the saturation effect and, consequently, along with the least square method, to estimate flux linkage to detect and estimate demagnetization fault severity. In [71], a detailed magnetic equivalent circuit (MEC) model was derived, and it used current, voltage and rotor angular signals to detect an ITSF fault and estimate the ITSF severity and short-circuit resistance.
The parity space equation produces the residual vectors utilizing mathematical equations using past measurements in a finite period. These residuals are then analyzed to detect faults. However, they are affected by noise and model uncertainties [72].
Extended Kalman filter (EKF) is another powerful mathematical algorithm based on minimizing the variance of estimation error applicable in nonlinear systems used to estimate motor parameters such as stator current, rotor speed and torque in case of fault detection. They show robust estimation against noise, have a low false alarm and have good detection speed. They need the last estimated values and measured signals to estimate the next step parameters. The Kalman filter can be used for different applications; in [73,74], the Kalman filter is used for autonomous driving vehicle state estimation and removing noise and outliers, and detailed information about the Kalman filter is provided due to its importance on state estimation, generating residuals and signal innovation. Figure 9 indicates the Kalman filter procedure. In [75], EKF is used to estimate the PMSM driver inverter switches Ron to detect open-switch faults. The high value of the estimated on-state switch resistance reveals the open-circuit fault.
The finite element method (FEM) is a highly effective computational technique for determining parameters (inductance, flux density and linkage, torque, etc.) of electromagnetic devices such as motors. It obtains precise results by dividing a large electromagnetic device into smaller elements and using complex mathematical equations, and it has been used for detecting PMSM faults, especially eccentricity, demagnetization and ITSF [77,78]. Figure 2 and Figure 3 in [79] show the finite element model of the PMSM.
Model predictive control is a motor drive control technique, which, due to simplicity and superior performance, is attracting attraction. MPC and cost functions have been used for fault detection recently. MPC for PMSM motor drive can be divided into two categories based on the control objective: model predictive current control (MPCC) and model predictive torque control (MPTC) [80], where MPCC shows priority over MPTC due to less computational efforts and its cost function with no weighting factors, which make it simpler and more effective [81]. In [82], open-phase fault (OPF) is detected based on a cost function in a PMSM motor drive with MPCC. The DC component and second harmonic component in the cost function designed for the current to track the references are involved in fault detection, and the phase angle difference of the stator current is utilized for locating the fault phase. This method is simple, and the operating condition and parameter variations do not affect its performance. Twenty-one combinations of open-switch faults in the inverter of the PMSM motor drive can be detected in the proposed method [83] based on the cost function and normalized αβ-current characteristics. In the case of ITSF in a PMSM motor drive with MPC, in [84], the fault signature is revealed by applying Wavelet transform to the MPC cost function. Table 2 shows a summary of some recent model-based FDD methods.
4.2. Signal-Based FDD Methods
Unlike model-based strategies, signal-based methods do not need an accurate system model. As a result, signal-based FDD approaches show superior performance in complex systems with inaccurate models and parameter uncertainties. The principle of such methods is extracting the fault features from the motor output signals, including current, voltage, magnetic flux density [85], torque [86], vibration, etc. Different types of faults can cause changes in output signals from the expected values under healthy conditions. One or more signals can be chosen as fault indicators based on the fault symptoms. Then, by applying signal feature extraction techniques to the measured values, the fault features are extracted, and by comparing them to a reference or threshold, the fault occurrence is detected, and the type of fault can be identified. Figure 10 presents the summary of signal-based method workflow in general.
Different types of faults can result in the same symptoms, so choosing the proper signal or signals as fault indicators is crucial. Stator current is needed in most motor drive controls, so it is always available without the need for extra sensors. Motor current signature analysis (MCSA) is the mostly used signal-based FDD technique [87]. In this technique, the stator current is usually transformed to the frequency domain using signal-processing techniques such as discrete furrier transform (FTT). The frequency domain can be utilized for fault detection under stationary and steady-state operations. On the other hand, the EV motor has dynamic nature, so the frequency domain is not applicable during transient motor operations. Therefore, using time-frequency domain feature extraction techniques provide the FDD with the capability of fault detection in non-stationary condition and improves the performance and reliability of EV motor FDD. Totally, signal-processing methods are divided into the time domain, frequency domain and time-frequency domain methods. Hilbert–Huang transform (HHT) [88], continuous and discrete wavelet transform (CWT and DWT) [89], short-time Fourier transform (STFT), empirical mode decomposition (EMD) [90] and Winger–Vile distribution are the most-used time-frequency domain signal-processing methods [91].
Current signal-based methods are widely used for fault detection as a current is easy and cheap to measure, and it is usually available as it is needed for motor drive control. MCSA-based diagnosis methods, dq-frame current analysis, negative- and zero-sequence current and Park’s vector approach are some of the methods. Generally, phase current-based methods are easy to implement, and there is no need for extra hardware, but they have a slow detection drawback (at least one fundamental period). In [92], MSCA-based partial demagnetization fault detection was proposed. In this technique, the additional even harmonics in the stator current caused by partial demagnetization were taken as fault indicators. In [93], the zero-sequence current (ZSC) is analyzed for open-switch fault detection in a dual inverter five-phase PMSM motor drive. ZSC is zero under the healthy condition, while under open-switch fault, it deviates from zero and is used as the fault indicator. The ratio of phase current positive sequence to negative sequence is considered as the open-switch fault indicator in [94] and analyzed using the Fourier series. Different open-switch faults are detected by setting a proper threshold for this fault indicator. Then the fault location is revealed using the current DC component. A simple method for open circuit and current sensor fault detection and identification is proposed in [95] where the normalized average current is utilized. Comparing other current-based methods, the FDD proposed in this paper has better rapidity in fault detection. An approach based on the mean value of the harmonic of the secondary subspace and current magnitude was proposed in [96] for open-phase fault detection. This method is not affected by operating conditions and motor parameters. It can detect the fault in less than half of the fundamental period.
In voltage signal-based methods, the motor phase voltage, line voltage, etc. are directly measured, and faults are detected based on the variations from reference voltages. It is very fast, reliable and usually more immune to false alarms, but the need for the voltage sensor increases the cost and complexity of the FDD. Symmetrical component analysis (zero and negative sequence) and dq-frame voltage analysis are two common voltage base methods. In [97], two-line voltages are analyzed, and their features are extracted to detect one or two open-switch faults in the PMSM motor drive inverter. This technique needs extra voltage sensors; however, fewer sensors make the FDD method cost friendly and simple. Also, it is very fast, and the detection time is 1/20 of the fundamental period. In [98], the change in the d and q axis’s voltage angle, which results from demagnetization and the ITSF effect on magnetic flux, is taken as the fault indicator. It is shown that the demagnetization fault increases this angle while the ITFS has an inverse effect, reducing this value. Also, in this paper, dq-voltage is analyzed to detect eccentricity faults. In [99], incipient ITSF detection and identification are investigated based on the zero-sequence voltage component (ZSVC). The ZSVC is used to detect fault occurrence, and then the type of fault is identified by injecting a high-frequency signal. However, the circuit needed to reach the neural point for symmetrical component analysis increases the cost of the system.
Vibration signal-based methods analyze the vibration signal spectrum obtained from vibration sensors to find fault symptoms. It is mostly suitable for mechanical fault detection. Vibration sensors are usually installed on the external surface of the stator, which increases the cost and complexity of the FDD. Also, environmental disturbances and external vibrations can easily affect FDD performance and efficiency. Other than mechanical faults, demagnetization faults can be detected by analyzing the vibration signals caused by electromagnetic force. Demagnetization in the air gap can result in low-frequency vibrations, which are proportional to the motor’s physical characteristics. This feature is extracted from the vibration signal by applying FFT in [100] and is taken as the fault indicator. Then, the demagnetization fault is revealed by comparing this index to the generated thresholds using Chebyshev’s inequality. An orthogonal DWT was applied to vibration signals to obtain energy signals, and it was used for rolling bearings fault detection, which has fast and accurate detection of the early-stage faults in [101].
Using a search coil is another reliable method to detect motor faults, especially ITSF, demagnetization and air–gap eccentricity faults. In fact, this method analyzes the electromagnetic signature of the faults. Search coils wound around the stator teeth and the induced voltage in the coils are measured and analyzed to detect and locate the fault [102]. When a fault occurs, additional harmonics are generated in the air–gap magnetic field, which is used for revealing the faults [103]. This method is very reliable; however, special installment is required during the manufacturing level, increasing the complexity and cost of the FDD. In [104], a new structure using search coils for ITSF detection is proposed. In this structure, the number of search coils is reduced to twice the number of phases, which reduces the cost noticeably. Then, by analyzing the negative sequence of the second harmonic of search coil voltages, ITSF is detected and identified. To improve the performance of this FDD method, it is transformed into a DC frame, making it possible to perform stationary and non-stationary operations. Another technique to detect eccentricity and demagnetization fault based on flux variations is using the hall-effect field sensor [32].
Table 3 summarizes the signal-based methods reviewed above.
5. Data-Driven FDD Methods for Electric Motor Drive
Data-driven FDD methods have emerged among FDD techniques in recent years due to their prior performance and features. This technique uses a large amount of historical data in healthy and faulty conditions to train the system to detect and classify faults. Data-driven methods do not require prior knowledge of the system’s mathematical model, which is a noticeable advantage for complex and ill-defined systems. They either use historical data to assess the current state of the system or represent human expertise in a set of rules as expert systems to analyze, learn, and make decisions on very complex problems. The used model and trained system can extract hidden features of the signals and detect the fault type even in the incipient stages and its severity based on the historical data used for training. Since data-driven methods are based regardless of the system model, signal and load, they have better robustness and generalization capability in varying system operating conditions, which is a noticeable advantage of this technique [105]. This technique can be divided into statistical-based and artificial intelligence-based. The former is based on probabilities, and the latter is based on classification [106]. In fact, artificial intelligence (AI) is the main component of data-driven methods, and due to the considerable and fast-paced progress in AI and machine learning tools, as well as the increasing complexity of systems, data-driven techniques are drawing more and more attention. Machine learning is mainly divided into three groups: supervised, unsupervised and semi-supervised learning methods [107]. For supervised learning, a set of labelled data is required, and the training and learning processes are based on the labelled data to find the correlation between the input data and output. In unsupervised learning algorithms, when there is a huge amount of unlabeled data, the learning and classification are performed based on the common features of the data. The semi-supervised algorithm is a combination of the two former algorithms. The labelled data are used to train the system to a level so that the other unlabeled data can be labelled. Then, the whole labelled data are used for learning. So far, many different data-driven and machine-learning methods have been introduced and are utilized for fault detection and diagnosis, such as artificial neural networks (ANN), Fuzzy logic (FL), support vector machine (SVM), deep learning (DL) and other machine learning tools. Regardless of the specific method, most data-driven FDDs are basically carried out through the following steps as shown in Figure 11:
Step 1, data collection: Due to the requirement of historical data in data-driven methods, a big database from the healthy and faulty condition of the motor drive system is required. If it is unavailable, a suite of nondestructive cycling tests should be performed at healthy and faulty conditions to develop comprehensive fault-predictive models. Different types of faults at various severity levels should be injected. To do so, a small resistor or copper plate can be used to connect the stator winding turns using taps to generate interturn short faults in motors with several severity levels. The demagnetization fault can be produced by replacing the PMs with a dummy without a magnet of the same size and weight. The IGBT open-circuit or short-circuit faults in the inverter can be generated by disabling the corresponding command signal or altering the faulty switches’ gate state signal. As mentioned before, the quantity and quality of the historical data play a crucial role in the performance and accuracy of the data-driven FDD methods. As a result, simulating some faults, such as short circuits and collecting enough high-quality data, is challenging.
Step 2, raw data processing using signal feature extraction: Using the dataset generated in Step 1, first, pre-processing is performed to increase the data quality and eliminate useless data and then, advanced signal feature extraction methods such as WT, PCA, STFT, etc. should be used to extract appropriate and useful features, reveal fault patterns and perform classification from the collected signals. Such pre-processing techniques enhance performance, as a properly designed agile feature engineering selection technique is crucial to identify predictive patterns truly. Building an effective data pre-processing step also protects from overfitting to the training data with expert knowledge about the process and a thorough understanding of the inherent variation in the data. Combining relevant pre-processing techniques with a proper machine-learning algorithm enables accurate fault prediction. This step implies computational load to the FDD method and decreases the detection speed. However, the deep learning methods which can be trained through raw data can overcome this drawback. For instance, to achieve a fast fault detection method, a convolutional neural network (CNN) is an appropriate candidate for this application due to the ability to train the system based on the raw data and the employed kernels with the need for a lower number of weights to be trained.
Step 3, training system and fault detection: In this step, collected data (step 1) with appropriate features (step 2) are used by appropriate machine learning techniques and the classifiers are trained by the dataset. Next, the trained system is used to detect and identify different types of faults.
Some of the main data-driven tools used for FDD for PMSM motor drives are as follows:
Fuzzy Logic (FL) maps a feature space into Fuzzy classes and is executed in three levels of fuzzification, inference and defuzzification for decision making based on the Fuzzy rules. First the inputs are mapped into Fuzzy variables in the fuzzification stage. In the inference level, the relation between input and output is formed based on Fuzzy rules. Then, outputs are generated in the defuzzification stage.
Artificial Neural Networks (ANNs) have been used widely for fault detection and diagnosis. It is one of the mature AI techniques used for non-linear systems working based on the human brain with the goal of recognizing relationships and patterns. The key feature of this method is the capability of modeling complex problems and generalizing the model to all possible conditions. In fact, modeling is performed by adjusting the weights and structure of neurons in the nervous system to learn based on the samples. In this technique, data are processed through the weighted connections between nodes in multiple layers, including the three main input, hidden and output layers. Self-learning and self-adaptive capability are the main advantages of ANNs. Various training techniques and network models have been introduced so far, and different data, including current, voltage, vibration, etc., are used for training ANNs. The back propagation neural network (BPNN) is one of the most used neural network models as a simple and reliable model [108].
Support vector machine (SVM) is a supervised learning algorithm that uses a small dataset for training and binary classification. It aims to classify data by finding the hyperplane to distinguish between two classes, as shown in Figure 12 [109].
K-nearest neighbours (KNN) is one of the most basic, straightforward, and efficient machine learning techniques for classification. KNN uses maps features as points in the space and classifies the new data by comparing the distance between the new data and K-nearest neighbours that is used for training, as shown in Figure 13 [110].
Extreme learning machine (ELM), different from SVM, is useful for multi-classification purposes and takes advantage of higher training speed. Optimal initial weights and thresholds can be derived just by applying the least square one time, which increases the training speed significantly [105].
Deep learning: In the machine learning techniques, first, it is necessary to extract signal features before using them for training systems. So, signal-processing methods, such as FTT, WT, HH, etc., are needed, adding more computational burden and delay for fault detection. Also, this step needs prior knowledge, which opposes fully automated fault detection without the need for prior knowledge [111]. To overcome this limitation, deep learning can be trained directly with raw signals eliminating the signal-processing level. In fact, these techniques provide the automatic feature extraction capability for fault detection. Some widely used deep learning methods are Autoencoder (AE), recurrent neural network (RNN), Generative advertised network (GAN), Convolutional neural network (CNN), and Deep belief network (DBN).
- CNN: This is an AI tool that is based on the human brain visual system and multi-layer NN. It works along with supervised learning and labelled data for fault classification, including four layers, the convolutional layer, pooling layer, fully connected layer and softmax layer, as shown in Figure 14. As mentioned, deep learning methods extract features automatically from the raw data. In CNN, the first two layers, including the convolutional and pooling layer, are responsible for this duty and classification is preformed through the fully connected and softmax layer [112]. CNN-based FDD methods are a hot research topic in fault detection. They not only can detect and diagnose faults but they can also reveal the severity of faults. They are very effective, highly accurate, and fast for FDD applications. However, they need higher computational power, more training time and more complex structures [113]. As time-domain signals are in 1D format, in some studies, CNN is used as 1D CNN. Also, by converting the signals to 2D format as grayscale images, 2D CNN has been utilized in many recent studies [114] Comparing 1D and 2D CNN, 1D usually shows higher accuracy and needs less human expertise as the conversion level is eliminated [115].
- Recurrent neural network (RNN) is a sophisticated sequence-data-learning machine developed to learn the time dependency of time series data [117]. The recurrent connections in the hidden layers result in a good ability to extract the patterns and make predictions in sequential data.
Figure 14.
CNN block diagram [112].
Figure 14.
CNN block diagram [112].

Figure 15.
Single-layer autoencoder structure.

5.1. Recent Data-Driven FDD Methods for Different PMSM Motor Drive Faults
This section reviews some of the recent data-driven FDD methods for electrical, mechanical and sensor faults.
5.1.1. Recent Data-Driven FDD Methods for Electrical Faults
Due to the limitations of the model-based and signal-based FDD methods, in recent years, data-driven methods have attracted much attention. In [118], a Fuzzy logic method is proposed for open-switch fault detection in PMSM motor drives. The average current Park’s vector is used as a fault indicator and to generate six fault symptom variables. Then, the generated variables are fed to the Fuzzy-based FDD block, as shown in Figure 16. The input variables are mapped into Fuzzy variables, the relation between input and output is extracted based on the Fuzzy rule in the Fuzzy inference stage, and finally, at the defuzzification stage, which is a Max–Min composition in this study, the outputs are generated for fault detection. The proposed method can detect single, multiple and intermittent open-switch faults.
Also, different types of machine learning tools are utilized for inverter open-switch fault detection. In [119], open-switch fault detection is performed through a combination of DWT and CNN to reduce noise and increase accuracy. For training the WCNN model, a small set of normalized current vector trajectory graph samples is used, avoiding the need for big datasets.
In the case of demagnetization fault, data-driven methods show superior advancement. In [120], STFT is used to extract related features to PM demagnetization from the stator current. Then, they are used to train two models based on KNN and MLP for demagnetization fault detection. Both models reached 100% accuracy and had very low training and detection times while keeping a simple structure. Comparing these two methods, KNN has a shorter detection time. To avoid the feature extraction level, in [115], 1D CNN was used for detecting demagnetization, partial demagnetization and ball-bearing faults. For this purpose, data are collected under different faulty conditions and labelled to use for supervised training. The capability of detecting faults in incipient stages is an important feature of a reliable FDD method. In [121], incipient demagnetization fault and simultaneous early ITSF detection based on CNN and stator current were proposed. As mentioned before, the raw signal-processing feature of CNN and eliminating the need for signal-processing tools increase the rapidity of fault detection while reaching very high accuracy in steady-state and transient conditions. The proposed method has a very high accuracy for incipient fault detection with a maximum time of 0.03 s, which is a noticeable merit. A semi-supervised training method was introduced in [122] for demagnetization fault detection using magnetic leakage signals to reduce the cost of generating labelled faulty data. First, data are converted to 2D images and features are extracted using a wavelet scattering convolutional network (WSCN). Then, a semi-supervised deep rule-based (SSDRB) model is trained for demagnetization fault detection. An unsupervised learning model was used in [123] to reduce the effort and cost of labelling the samples. Five different signals are chosen for training the system to increase accuracy. An autoencoder model is used to train and detect the demagnetization fault. Then, the severity is estimated using the K-means clustering algorithm.
In [124], two methods based on SVM and CNN were proposed for ITSF detection. The PMSM mathematical model was used to select the proper feature to use for the SVM-based approach as a model-aided method. Both algorithms could reach a high accuracy of 99%, while SVM needs fewer data and time for training with a simple structure. This study shows the merits of hybrid methods. Recently, deep learning has been used in more applications in fault detection due to its advantages. In [117], an attention-based RNN method with an encoder–decoder structure was utilized to detect early ITSF and estimate its severity for various operating conditions. It is one of the first studies to use deep learning for severity estimation. The stator currents and rotational speed were used as the FDD input, eliminating the need for extra sensors. In [125], to overcome the deep learning method’s complexity and long training time, a simplified CNN for incipient ITSF detection is introduced with lower training time and fewer input parameters while obtaining -high efficiency. The three parameters of stator current, phase-to-phase voltage and axial flux were used as inputs to find the best fault indicator signal as raw input data. It tried to reach a trade-off between the number of connected neurons and training time to figure out a simple and efficient CNN structure without the pre-processing stage. The structure trained with axial flux showed a higher accuracy of 99.4% as the flux is affected by the ITSF with better robustness to operating conditions and very fast detection. However, coils are needed for gathering flux data. Bispectrum analysis and CNN were utilized in [126] for ITSF fault detection and classification. In this technique, bispectrum analysis is applied to convert the current signals to images instead using of raw data. It reduces the CNN training time to as low as one minute while increasing the accuracy of ITSF detection to a high of 99.4%. However, adding the pre-processing stage increases the detection time.
Table 4 summarizes the reviewed data-driven FDD methods for electrical faults.
5.1.2. Recent Data-Driven FDD Methods for Mechanical Faults
Machine learning tools are being used in electric motor drive mechanical fault detection as well as for other types of fault detection. In [108], mixed eccentricity offline fault detection is investigated based on large data with a wide variety. An analytical model (AM) of Electromotive force (EMF) was used to generate the samples. EMF is fundamental and harmonic components are extracted using FFT, chosen as fault indicators, and used as labelled data to train the BPNN for mixed eccentricity fault detection. This technique is highly accurate and efficient, showing generalization capability but with the drawback of offline applications. However, online fault detection in incipient stages is of high importance in transportation applications. In [127], incipient eccentricity fault detection for the severity of 10–40% is investigated in IPMSM. In this study, the faulty IPMSM was studied using ANSYS Maxwell FEA and different parameters, including stator current, speed and flux density, were used to train various machine-learning models. Among the tested algorithms, the FDD method based on the KNN trained with stator current reached the highest accuracy with 96.3% precision.
In [30], bearing failure detectors that used various shallow neural network topologies, including multi-layer perceptrons (MLPs), networks with radial base function (RBFs), and self-organizing Kohonen maps (SOMs), were analyzed, and their efficacy in identifying and categorizing the failures was evaluated. In this study, the vibration signal was measured for various voltage frequencies and load torque in three axes, and X-axis showed the most variation during bearing fault and was used as a fault indicator. FFT and HTT were applied for signal processing to use vibration harmonic components. For the MPL method, after 15 training series, 100% accuracy was achieved, while the other methods needed more complex structures approving the performance of classical NNs. In [128], a multiscale shared learning network (MSSLN) was proposed for bearing fault detection based on vibration signals for vehicular applications. In [111], using vibration signals, a multiscale kernel-based residual CNN (MK-ResCNN) was proposed for five types of rotor fault detection under non-stationary conditions. Due to the need to extract useful and deep features of vibrations signals, a deep enough network is inevitable, resulting in a degradation problem. In this study, residual learning is applied to MK-CNN to overcome this limitation. However, using vibration sensors to collect the vibration signals increases the system’s cost and complexity [129].
To reduce the cost, a developed non-contact sensor was used to collect the vibration signals [130]. The collected data were denoised using DWT, and then the proper features were extracted and using SVM, different types of bearing faults were revealed for various operating conditions. To avoid the vibration sensor cost and the environmental effects on it, in [31], speed signal and CNN model were utilized to detect bearing fault.
Another bearing fault detection was proposed in [131] based on 2D CNN and MSCA for various operating conditions. In this method, Garmian angular field (GAF) was utilized to convert time-domain current signals to 2D images, eliminating the signal-processing stage in CNN. The images are used for training a simple two-layer CNN for detecting bearing faults with a reduced computational time and high accuracy of more than 99%. Multiscale learning is key to reaching higher accuracy and better performance during non-stationary operations and changing conditions.
Table 5 summarizes the reviewed data-driven FDD methods for mechanical faults.
5.1.3. Recent Data-Driven FDD Methods for Sensor Faults
So far, different methods have been introduced for sensor fault detection; however, several existing limitations are bringing attention to data-driven and machine learning-based methods. In [132], various current sensor fault detection was investigated using NN and raw speed and current signals. Comparing the conventional methods, using this NN increased the detection speed during low computational burden. The MLP NN reached accuracy of 100% for current sensor fault detection under various conditions in stationary and non-stationary operating modes [133].
In [134], open-switch and current sensor fault detection for a multi-sector PMSM was investigated based on a metric learning method. This technique takes advantage of a low computational burden, reduces the fault detection time to 1/10 of the current fundamental cycle and can detect and locate 28 combinations of open-switch fault and current sensor fault. Using the structural characteristics makes the proposed method robust to current and speed variations.
The reviewed data-driven FDD methods for sensor faults are summarized in Table 6.
6. EVs’ Battery Fault Detection
As it is obvious and has been discussed, the safety and reliability of an EV is one of the main factors affecting the electrification of transportation. The EV battery is one of the major parts in this regard, which can have many limitations. It is always prone to different types of faults, some of which can be hazardous and even life threatening. To overcome these problems, fault detection and diagnosis of the battery are as crucial as fault detection in the EV motor drive. In recent years, many types of research have been devoted to this field. The FDD methods for battery faults are similarly classified into three main groups, model-based, signal processing and data-driven, with the same principles mentioned in the electric motor drive FDD methods. Usually, the parameters used for battery fault detection are voltage, current and temperature. In the rest of this section, different FDD methods for battery faults are introduced briefly, and some recent methods are reviewed.
6.1. Model-Based FDD Methods for Battery Faults
Model-based battery FDD methods are based on using the battery models, filters and observers to generate the residuals. A battery can be modeled as electrochemical, electrical, thermal or a combination of these models [135]. The main model-based FDD methods for battery fault detection are state estimation, parameter estimation, parity space equation and structural analysis. Some proposed model-based methods are introduced briefly as follows.
Thermal faults were detected using the Leunberger observer and the thermal model of the battery [136]. A partial differential equation (PDE) model-based technique was introduced in [137] to detect thermal faults in Lithium-ion batteries. Two PDE observers were used for estimation and fault diagnostic, making the fault detection robust to uncertainties.
Using voltage signals is usually more effective and accurate than the temperature for fault detection [138]. In [139], structural analysis was used to detect internal and external short-circuit faults by studying the residuals generated by the structural model. In [140], an online external short-circuit fault detection was proposed based on a two-step ECM of the battery. This method has a very fast detection speed and high accuracy. The generalization capability of the proposed method makes it proper for battery packs with various numbers of cells.
Due to the features of the KF, it has been used frequently for battery fault detection. In [141], ECM and EKF were used to estimate the battery voltage terminal to detect the voltage and sensor fault as a simple model-based method. In [142], recursive least squares and unscented KF were used to estimate the SOC and generate the residuals. The current and voltage sensor faults were revealed based on the generated residuals. The measured temperature separates the sensor faults from cell faults. In [143], EKF was used to estimate the SOC, and based on the SOC correlation of adjacent cells, an early-stage internal short circuit was detected during dynamic operation, which is applicable for series-connected configuration. In [144], on-board short-circuit detection was proposed using EKF. EKF based on the voltage values is used to estimate the SOC, and it detects the fault by comparing it with the calculated SOC. It shows fast, accurate and robust detection capability and can evaluate the fault severity.
To increase the reliability of the battery FDD, in [145], a model-based method is combined with entropy methods to reach a multi-fault detection system. The proposed method can detect voltage, current and temperature sensor faults, short circuits and connection faults. EKF is used to detect sensor faults, and by utilizing the entropy method, short circuit and connection faults are diagnosed, which is robust against noise and inconsistencies of SOC and temperature.
6.2. Signal-Based FDD Methods for Battery Faults
In this type of FDD, signals are collected directly from sensors, processed and studied to reveal the faults, usually by comparing them to a threshold. The mostly used signal-processing techniques to analyze the frequencies in which the electrochemical reactions happen are WT and FFT [146].
In [147], various battery faults are detected using the EMD of the voltage signal and sample entropy analysis. This method can detect different types of faults due to the unexpected voltage drops detected by sample entropy. This method takes advantage of the noise cancellation of EMD, so it has high accuracy.
In [148], gas and force sensors were used to detect the internal short-circuit error. This method is based on sensing the cell swelling and generated CO2 gas caused by the chemical reactions due to internal short circuits. However, using extra sensors increases the cost and complexity of the system.
6.3. Data-Driven FDD Methods for Battery Faults
Due to the same limitations of the model-based and signal-based methods, such as the inaccurate model and very nonlinear characteristic of the lithium-ion batteries, to reach higher accuracies and reliabilities, the data-driven methods and machine-learning-based FDDs are growing rapidly in the case of battery fault detection recently. However, there is a massive gap in FDD methods based on machine-learning tools in case of battery faults. Some of the recent data-driven methods are as follows.
In [149], battery voltage fault detection was proposed based on general regression neural network (NN). Using DWT, the voltage was denoised, and then several parameters were used to train the GRNN to reach the highest accuracy of more than 99%. This scheme can detect, locate and estimate the fault severity. In [138], SVM was used to detect battery voltage faults and estimate their severity. First, the voltage data are denoised to increase accuracy and reliability. Then, to reduce the detection time, a modified covariance matrix was introduced as the condition indicator of the SVM, which was optimized using the grid search technique.
In [150], battery thermal runaway detection is proposed based on abnormal heat generation and the long short-term memory CNN (LSTM-CNN) model. PCA is used to improve the input feature, and LSTM-CNN is trained with real-world EV data to predict the temperature. This method is accurate and can alert the thermal runaway fault in advance.
To increase the accuracy and efficiency of FDD, in [151], an online, hybrid FDD method based on the combination of LSTM-RNN and the equivalent circuit model (ECM) was proposed. The model is trained based on real-world data, and by utilizing the prejudgment module, the computational cost has been reduced.
To overcome the lack of comprehensive fault detection methods, some FDD schemes have been proposed. In [152], different battery faults, including the voltage, discharge current and temperature, were injected into a battery pack, and the collected data were used to train an improved radial basis function neural network (RBF-NN) to detect the faults. The proposed method could reach a fault detection accuracy of 100%. Another multi-fault detection method was proposed in [153], based on multi-classification SVM (MC-SVM). In this method, overvoltage, undervoltage, overheating and low-capacity faults were detected using MC-SVM, which was trained using a small data set while reaching very high accuracy. Training based on a small data set reduces the cost of generating faulty data.
Summary of the reviewed FDD methods for battery faults of EV are presented in Table 7.
7. Conclusions
The increasing attention to the importance of electrification of transportation in recent years has made EVs the future of transportation. In this regard, to gain the most significant share of the market, the safety and reliability of EVs are of high priority. The electric motor drive and the energy storage system are two main parts of EVs. Due to the outstanding features, the PMSM motor drive is turning to the first choice for the power train of the EVs and lithium-ion batteries are the main energy storage system. However, due to the working environment and nature of EVs, fault occurrence is inevitable. Therefore, fault detection and diagnosis have become vital functions, and much research has been devoted to this field, yet there is a need to improve and address the remaining gaps. This review paper is aimed at introducing different types of faults in the PMSM motor drive and the battery pack of the EVs, the FDD methods and recent advancements in this field so that it can be used for future works to reach fully reliable and safe electric transportation.
FDD for the PMSM motor drive focuses on two parts of motor side and inverter side faults. Therefore, different FDD methods are studied thoroughly in this paper, including the model-based, signal-based, and data-driven methods. The complex models, parameter uncertainties and other limitations of model-based and signal-based methods, along with the fast-paced advancement in machine-learning tools with their superior features, have attracted attention to using various machine-learning tools for fault detection in PMSM motor drives. Many works based on deep learning tools (especially CNN) have been introduced until now, and significant improvements have been shown.
In the case of battery fault detection, most of the FDD methods proposed so far belong to the model-based group and are especially based on KF. However, due to the unknown characteristics of lithium-ion batteries and their non-linear behaviour, data-driven methods could be the future of FDD methods for batteries. So far, many data-driven methods, including machine-learning tools, have been used in the case of battery state estimation. Nevertheless, for fault detection, just a few methods based on neural networks, SVM and deep learning are investigated.
The conventional methods commonly used for fault detection of EVs are mainly model-based and signal-based. The lack of accuracy of the motor and battery models (especially during their lifespan) results in limitations and reduces the robustness and precision of the FDD. Also, the measurement noises make signal-based methods slow and unsuitable for incipient fault detection. However, recent works, especially the data-driven methods presented in this paper, can overcome some limitations and may be the future of fault detection. Some of the main advancements achieved in the presented methods are incipient fault detection, robustness to parameter uncertainties, consideration of lifespan, increased accuracy and speed of fault detection, generalization capability and non-stationary condition fault detection. However, several gaps remain to be addressed to satisfy all the desired FDD features and can be investigated in future works, as follows:
1-PMSM motor drive fault detection:
Reducing the detection time, using a deep learning algorithm, may be a good choice to overcome the long signal-processing time.
Comprehensive fault detection methods cover different types of faults and different faults show similar symptoms, making it difficult to distinguish between them. Most of the existing methods focus on one or two types of faults. By selecting more signals and their features as fault indicators, multiple fault detection could be a great improvement.
Non-stationary condition fault detection; EVs have dynamic characteristics, so fault detection during transient and non-stationary conditions is critical. This can be improved by using time-frequency or time-domain signal-processing methods and utilizing deep learning algorithms.
Short circuit fault detection; most of the existing electric motor drive inverter fault detection can detect only the open-switch fault, while detecting the short circuit of the switches is not studied.
Real-time fault detection, reducing the FDD cost and overcoming hardware limitations, could also be focused on in future works. Even though many machine learning and deep learning-based methods are proposed, there is much to expand, and more powerful tools can be used in fault detection and diagnosis of PMSM motor drives.
2-Battery system fault detection:
Various machine-learning, deep learning and reinforcement learning tools can be utilized to obtain higher accuracies, comprehensive fault detection and more robustness to uncertainties. In addition, using more parameters as fault indicators could be an excellent choice to reach higher accuracy in fault detection.
Finally, this paper can be a good reference for future works as many recent works are studied, and state-of-art techniques are introduced.
Author Contributions
Conceptualization, M.Z.K. and M.A.; methodology, M.Z.K., M.A. and H.C.; writing—original draft preparation, M.Z.K. and M.A.; writing—review and editing, M.Z.K., M.A. and H.C.; visualization, M.Z.K., M.A. and H.C.; supervision, H.C.; project administration, M.A. and H.C.; funding acquisition, H.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Ontario Ministry of Colleges and Universities, Canada, grant number 115838.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data was created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Popescu, M.; Goss, J.; Staton, D.A.; Hawkins, D.; Chong, Y.C.; Boglietti, A. Electrical Vehicles—Practical Solutions for Power Traction Motor Systems. IEEE Trans. Ind. Appl. 2018, 54, 2751–2762. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Wang, W.; Hu, Y. Comprehensive Diagnosis and Tolerance Strategies for Electrical Faults and Sensor Faults in Dual Three-Phase PMSM Drives. IEEE Trans. Power Electron. 2019, 34, 6669–6684. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, C.; Yu, S.; Ge, D.; Zhou, H. Status and challenges facing representative anode materials for rechargeable lithium batteries. J. Energy Chem. 2022, 66, 260–294. [Google Scholar] [CrossRef]
- Shete, S.; Jog, P.; Kamalakannan, R.; Raghesh, J.T.A.; Manikandan, S.; Kumawat, R.K. Fault Diagnosis of Electric Vehicle’s Battery by Deploying Neural Network. In Proceedings of the 6th International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud), I-SMAC, Dharan, Nepal, 10–12 November 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 346–351. [Google Scholar] [CrossRef]
- Lang, W.; Hu, Y.; Gong, C.; Zhang, X.; Xu, H.; Deng, J. Artificial Intelligence-Based Technique for Fault Detection and Diagnosis of EV Motors: A Review. IEEE Trans. Transp. Electrif. 2022, 8, 384–406. [Google Scholar] [CrossRef]
- Bhuiyan, E.A.; Akhand, M.A.; Das, S.K.; Ali, F.; Tasneem, Z.; Islam, R.; Saha, D.K.; Badal, F.R.; Ahamed, H.; Moyeen, S.I. A Survey on Fault Diagnosis and Fault Tolerant Methodologies for Permanent Magnet Synchronous Machines. Int. J. Autom. Comput. 2020, 17, 763–787. [Google Scholar] [CrossRef]
- Niu, X.; Zhu, L.; Ding, H. New statistical moments for the detection of defects in rolling element bearings. Int. J. Adv. Manuf. Technol. 2005, 26, 1268–1274. [Google Scholar] [CrossRef]
- Moosavi, S.; Djerdir, A.; Ait-Amirat, Y.; Khaburi, D. ANN based fault diagnosis of permanent magnet synchronous motor under stator winding shorted turn. Electr. Power Syst. Res. 2015, 125, 67–82. [Google Scholar] [CrossRef]
- Nandi, S. Detection of stator faults in induction machines using residual saturation harmonics. IEEE Trans. Ind. Appl. 2006, 42, 1201–1208. [Google Scholar] [CrossRef]
- Bonnett, A.; Soukup, G. Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors. IEEE Trans. Ind. Appl. 1992, 28, 921–937. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Romeral, L. Diagnosis of interturn faults in pmsms operating under nonstationary conditions by applying order tracking filtering. IEEE Trans. Power Electron. 2013, 28, 507–515. [Google Scholar] [CrossRef]
- Kim, K.-H.; Choi, D.-U.; Gu, B.-G.; Jung, I.-S. Fault model and performance evaluation of an inverter-fed permanent magnet synchronous motor under winding shorted turn and inverter switch open. IET Electr. Power Appl. 2010, 4, 214–225. [Google Scholar] [CrossRef]
- Kim, K.-T.; Park, J.-K.; Kim, B.-W.; Hur, J. Comparison of the fault characteristics of IPM-type and SPM-type BLDC motors under Inter-Turn Faults conditions using Winding Function Theory. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition, ECCE, Raleigh, NC, USA, 15–20 September 2012; pp. 1262–1269. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Kim, K.-T.; Hur, J. Finite-element analysis of the demagnetization of IPM-type BLDC motor with stator turn fault. IEEE Trans. Magn. 2014, 50, 889–892. [Google Scholar] [CrossRef]
- Qi, Y.; Bostanci, E.; Gurusamy, V.; Akin, B. A Comprehensive Analysis of Short-Circuit Current Behavior in PMSM Interturn Short-Circuit Faults. IEEE Trans. Power Electron. 2018, 33, 10784–10793. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, H.; Kim, S.W. Detection of Interturn Short-Circuit Fault and Demagnetization Fault in IPMSM by 1-D Convolutional Neural Network. In Proceedings of the 2019 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Macao, China, 1–4 December 2019. [Google Scholar]
- Hong, J.; Park, S.; Hyun, D.; Kang, T.-J.; Bin Lee, S.; Kral, C.; Haumer, A. Detection and Classification of Rotor Demagnetization and Eccentricity Faults for PM Synchronous Motors. IEEE Trans. Ind. Appl. 2012, 48, 923–932. [Google Scholar] [CrossRef]
- Kim, K.-C.; Lim, S.-B.; Koo, D.-H.; Lee, J. The Shape Design of Permanent Magnet for Permanent Magnet Synchronous Motor Considering Partial Demagnetization. IEEE Trans. Magn. 2006, 42, 3485–3487. [Google Scholar] [CrossRef]
- Ruoho, S.; Kolehmainen, J.; Ikaheimo, J.; Arkkio, A. Interdependence of demagnetization, loading, and temperature rise in a permanent-magnet synchronous motor. IEEE Trans. Magn. 2010, 46, 949–953. [Google Scholar] [CrossRef]
- Espinosa, A.G.; Rosero, J.A.; Cusido, J.; Romeral, L.; Ortega, J.A. Fault detection by means of Hilbert-Huang transform of the stator current in a PMSM with demagnetization. IEEE Trans. Energy Convers. 2010, 25, 312–318. [Google Scholar] [CrossRef] [Green Version]
- Joo, D.; Cho, J.-H.; Woo, K.; Kim, B.-T.; Kim, D.-K. Electromagnetic field and thermal linked analysis of interior permanent-magnet synchronous motor for agricultural electric vehicle. IEEE Trans. Magn. 2011, 47, 4242–4245. [Google Scholar] [CrossRef]
- Faiz, J.; Nejadi-Koti, H. Demagnetization Fault Indexes in Permanent Magnet Synchronous Motors—An Overview. IEEE Trans. Magn. 2016, 52, 8201511. [Google Scholar] [CrossRef]
- Yang, Z.; Shi, X.; Krishnamurthy, M. Vibration monitoring of PM synchronous machine with partial demagnetization and inter-turn short circuit faults. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo: Components, Systems, and Power Electronics—From Technology to Business and Public Policy, ITEC, Beijing, China, 31 August–3 September 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Zhang, Z.; Luo, G.; Zhang, Z.; Tao, X. A hybrid diagnosis method for inverter open-circuit faults in PMSM drives. CES Trans. Electr. Mach. Syst. 2020, 4, 180–189. [Google Scholar] [CrossRef]
- Cai, B.; Zhao, Y.; Liu, H.; Xie, M. A Data-Driven Fault Diagnosis Methodology in Three-Phase Inverters for PMSM Drive Systems. IEEE Trans. Power Electron. 2017, 32, 5590–5600. [Google Scholar] [CrossRef]
- Gan, C.; Chen, Y.; Qu, R.; Yu, Z.; Kong, W.; Hu, Y. An Overview of Fault-Diagnosis and Fault-Tolerance Techniques for Switched Reluctance Machine Systems. IEEE Access 2019, 7, 174822–174838. [Google Scholar] [CrossRef]
- Liu, Z.; Fang, L.; Jiang, D.; Qu, R. A Machine-Learning-Based Fault Diagnosis Method With Adaptive Secondary Sampling for Multiphase Drive Systems. IEEE Trans. Power Electron. 2022, 37, 8767–8772. [Google Scholar] [CrossRef]
- Siddiqui, K.M.; Bakhsh, F.I.; Ahmad, R.; Solanki, V. Advanced Signal Processing Based Condition Monitoring of PMSM for Stator-inter Turn Fault. In Proceedings of the 2021 IEEE 8th Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering, UPCON, Dehradun, India, 11–13 November 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Ewert, P.; Orlowska-Kowalska, T.; Jankowska, K. Effectiveness analysis of pmsm motor rolling bearing fault detectors based on vibration analysis and shallow neural networks. Energies 2021, 14, 712. [Google Scholar] [CrossRef]
- Guo, Z.; Yang, M.; Huang, X. Bearing fault diagnosis based on speed signal and CNN model. Energy Rep. 2022, 8, 904–913. [Google Scholar] [CrossRef]
- Park, Y.; Fernandez, D.; Bin Lee, S.; Hyun, D.; Jeong, M.; Kommuri, S.K.; Cho, C.; Reigosa, D.D.; Briz, F. Online Detection of Rotor Eccentricity and Demagnetization Faults in PMSMs Based on Hall-Effect Field Sensor Measurements. IEEE Trans. Ind. Appl. 2019, 55, 2499–2509. [Google Scholar] [CrossRef]
- Choi, K.; Kim, Y.; Kim, S.-K.; Kim, K.-S. Current and Position Sensor Fault Diagnosis Algorithm for PMSM Drives Based on Robust State Observer. IEEE Trans. Ind. Electron. 2021, 68, 5227–5236. [Google Scholar] [CrossRef]
- Xia, J.; Guo, Y.; Dai, B.; Zhang, X. Sensor Fault Diagnosis and System Reconfiguration Approach for an Electric Traction PWM Rectifier Based on Sliding Mode Observer. IEEE Trans. Ind. Appl. 2017, 53, 4768–4778. [Google Scholar] [CrossRef]
- El Khil, S.K.; Jlassi, I.; Estima, J.; Mrabet-Bellaaj, N.; Cardoso, A.M. Current sensor fault detection and isolation method for PMSM drives, using average normalised currents. Electron. Lett. 2016, 52, 1434–1436. [Google Scholar] [CrossRef]
- Kang, Y.; Duan, B.; Zhou, Z.; Shang, Y.; Zhang, C. Online multi-fault detection and diagnosis for battery packs in electric vehicles. Appl. Energy 2020, 259, 114170. [Google Scholar] [CrossRef]
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery management system hardware concepts: An overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Rheinfeld, A.; Sturm, J.; Frank, A.; Kosch, S.; Erhard, S.V.; Jossen, A. Impact of Cell Size and Format on External Short Circuit Behavior of Lithium-Ion Cells at Varying Cooling Conditions: Modeling and Simulation. J. Electrochem. Soc. 2019, 167, 013511. [Google Scholar] [CrossRef]
- Ouyang, M.; Zhang, M.; Feng, X.; Lu, L.; Li, J.; He, X.; Zheng, Y. Internal short circuit detection for battery pack using equivalent parameter and consistency method. J. Power Source 2015, 294, 272–283. [Google Scholar] [CrossRef]
- Liu, G.; Ouyang, M.; Lu, L.; Li, J.; Han, X. Analysis of the heat generation of lithium-ion battery during charging and discharging considering different influencing factors. J. Therm. Anal. Calorim. 2014, 116, 1001–1010. [Google Scholar] [CrossRef]
- Samanta, A.; Chowdhuri, S.; Williamson, S.S. Machine Learning-Based Data-Driven Fault Detection/Diagnosis of Lithium-Ion Battery: A Critical Review. Electronics 2021, 10, 1309. [Google Scholar] [CrossRef]
- Mehrjou, M.R.; Mariun, N.; Karami, M.; Misron, N.; Radzi, M.A.M. Statistical features analysis of transient current signal for broken bars fault detection in LS-PMSMs. In Proceedings of the 2015 IEEE International Conference on Smart Instrumentation, Measurement and Applications, ICSIMA, Kuala Lumpur, Malaysia, 24–25 November 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- He, Z.; Wang, Z.; Duan, C.; Wang, X. Fault Diagnosis of Inter-turn Short Circuit Faults in Dual Three-Phase PMSM Drives. In Proceedings of the 2021 IEEE 13th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, SDEMPED, Dallas, TX, USA, 22–25 August 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 388–394. [Google Scholar] [CrossRef]
- Chowdhury, M.H. Modeling of faults in permanent magnet synchronous machines. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific, ITEC Asia-Pacific, Busan, Republic of Korea, 1–4 June 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 246–250. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis With Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Dai, X.; Gao, Z. From Model, Signal to Knowledge: A Data-Driven Perspective of Fault Detection and Diagnosis. IEEE Trans. Ind. Inform. 2013, 9, 2226–2238. [Google Scholar] [CrossRef] [Green Version]
- Skliros, C.; Miguez, M.E.; Fakhre, A.; Jennions, I. A review of model based and data driven methods targeting hardware systems diagnostics. Diagnostyka 2019, 20, 3–21. [Google Scholar] [CrossRef]
- Gonzalez-Jimenez, D.; Del-Olmo, J.; Poza, J.; Garramiola, F.; Madina, P. Data-driven fault diagnosis for electric drives: A review. Sensors 2021, 21, 4024. [Google Scholar] [CrossRef]
- Isermann, R. Model-based fault-detection and diagnosis–status and applications. Annu. Rev. Control 2005, 29, 71–85. [Google Scholar] [CrossRef]
- Jankowska, K.; Dybkowski, M. Experimental Analysis of the Current Sensor Fault Detection Mechanism Based on Cri Markers in the PMSM Drive System. Appl. Sci. 2022, 12, 9405. [Google Scholar] [CrossRef]
- Bouslimani, S.; Drid, S.; Chrifi-Alaoui, L.; Delahoche, L. On line inter-turn short-circuit fault diagnosis and nonlinear control of PMSM. In Proceedings of the 2022 19th IEEE International Multi-Conference on Systems, Signals and Devices, SSD, Sétif, Algeria, 6–10 May 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 1139–1143. [Google Scholar] [CrossRef]
- Berriri, H.; Naouar, M.W.; Slama-Belkhodja, I. Easy and fast sensor fault detection and isolation algorithm for electrical drives. IEEE Trans. Power Electron. 2011, 27, 490–499. [Google Scholar] [CrossRef]
- Mouzakitis, A. Classification of fault diagnosis methods for control systems. Meas. Control 2013, 46, 303–308. [Google Scholar] [CrossRef]
- Freire, N.M.A.; Estima, J.O.; Cardoso, A.J.M. A voltage-based approach without extra hardware for open-circuit fault diagnosis in closed-loop PWM AC regenerative drives. IEEE Trans. Ind. Electron. 2014, 61, 4960–4970. [Google Scholar] [CrossRef]
- An, Q.-T.; Sun, L. Current residual vector-based open-switch fault diagnosis of inverters in PMSM drive systems. IEEE Trans. Power Electron. 2015, 30, 2814–2827. [Google Scholar] [CrossRef]
- Karimi, S.; Poure, P.; Saadate, S. Fast power switch failure detection for fault tolerant voltage source inverters using FPGA. IET Power Electron. 2009, 2, 346–354. [Google Scholar] [CrossRef]
- Upadhyay, A.; Alakula, M. A Stator Flux Linkage DC Offset Based Stator Fault Detection For PMSM Drive Systems. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Brussels, Belgium, 17–20 October 2022; IEEE Computer Society: Washington, DC, USA, 2022. [Google Scholar] [CrossRef]
- Mazzoletti, M.A.; Bossio, G.R.; De Angelo, C.H.; Espinoza-Trejo, D.R. A Model-Based Strategy for Interturn Short-Circuit Fault Diagnosis in PMSM. IEEE Trans. Ind. Electron. 2017, 64, 7218–7228. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.O.; El Khil, S.K.; Bellaaj, N.M.; Cardoso, A.J.M. A Robust Observer-Based Method for IGBTs and Current Sensors Fault Diagnosis in Voltage-Source Inverters of PMSM Drives. IEEE Trans. Ind. Appl. 2017, 53, 2894–2905. [Google Scholar] [CrossRef]
- Choi, C.; Lee, K.; Lee, W. Observer-based phase-shift fault detection using adaptive threshold for rotor position sensor of permanent-magnet synchronous machine drives in electromechanical brake. IEEE Trans. Ind. Electron. 2015, 62, 1964–1974. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, J.; Cui, P.; Lu, Y.; Lu, M.; Yu, Y. A Fast and Robust Open-Switch Fault Diagnosis Method for Variable-Speed PMSM System. IEEE Trans. Power Electron. 2021, 36, 2598–2610. [Google Scholar] [CrossRef]
- Eissa, M.A.; Darwish, R.R.; Bassiuny, A.M. Design of Observer-Based Fault Detection Structure for Unknown Systems using Input–Output Measurements: Practical Application to BLDC Drive. Power Electron. Drives 2019, 4, 217–226. [Google Scholar] [CrossRef] [Green Version]
- Hou, M.; Shi, H. Stator-Winding Incipient Shorted-Turn Fault Detection for Motor System in Motorized Spindle Using Modified Interval Observers. IEEE Trans. Instrum. Meas. 2021, 70, 3505716. [Google Scholar] [CrossRef]
- Bourogaoui, M.; Jlassi, I.; El Khil, S.K.; Sethom, H.B.A. An effective encoder fault detection in PMSM drives at different speed ranges. In Proceedings of the Proceedings—SDEMPED 2015: IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, Guarda, Portugal, 1–4 September 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015; pp. 90–96. [Google Scholar] [CrossRef]
- Hermans, F.J.J.; Zarrop, M.B. Sliding Mode Observers for Robust Sensor Monitoring. IFAC Proc. Vol. 1996, 29, 6530–6535. [Google Scholar] [CrossRef]
- He, J.; Zhang, C.; Mao, S.; Wu, H.; Zhao, K. Demagnetization fault detection in permanent magnet synchronous motors based on sliding observer. J. Nonlinear Sci. Appl. 2016, 9, 2039–2048. [Google Scholar] [CrossRef] [Green Version]
- Hashemi, M.; Golkani, M.A.; Watzenig, D. A Robust Approach for Inter-Turn Fault Detection of PMSM Used for Autonomous Vehicles. In Proceedings of the ICCVE 2022—IEEE International Conference on Connected Vehicles and Expo, Lakeland, FL, USA, 7–9 March 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Li, H.; Qian, Y.; Asgarpoor, S.; Sharif, H. Machine Current Sensor FDI Strategy in PMSMs. IEEE Access 2019, 7, 158575–158583. [Google Scholar] [CrossRef]
- Bao, L.; Yao, G.; Chen, S.; Wang, Z.; Hu, X.; Huang, Y. An On-line Detection Method for Single-Phase Inter-Turn Fault Occurring in High-Speed PMSM. In Proceedings of the 23rd International Conference on Electrical Machines and Systems, ICEMS, Hamamatsu, Japan, 24–27 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 1095–1100. [Google Scholar] [CrossRef]
- Moon, S.; Lee, J.; Jeong, H.; Kim, S.W. Demagnetization Fault Diagnosis of a PMSM Based on Structure Analysis of Motor Inductance. IEEE Trans. Ind. Electron. 2016, 63, 3795–3803. [Google Scholar] [CrossRef]
- Forstner, G.; Kugi, A.; Kemmetmuller, W. Model-based fault identification of inter-turn winding short circuits in PMSM. In Proceedings of the 2020 International Conference on Electrical Machines, ICEM, Gothenburg, Sweden, 23–26 August 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 1390–1396. [Google Scholar] [CrossRef]
- Aminu, K.T.; Jibril, M.M.; Jimoh, A.A.; Mohammed, S.; Jumba, A.G. Fault Detection and Isolation of a Three-tank System Using Analytical Temporal Redundancy—Parity Space/Relation Based Residual Generation. Int. J. Adv. Sci. Res. Eng. 2020, 6, 180–187. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control Syst. Technol. 2023, 31, 179–192. [Google Scholar] [CrossRef]
- Xia, X.; Meng, Z.; Han, X.; Li, H.; Tsukiji, T.; Xu, R.; Zheng, Z.; Ma, J. An automated driving systems data acquisition and analytics platform. Transp. Res. Part C Emerg. Technol. 2023, 151, 104120. [Google Scholar] [CrossRef]
- Dan, L. EKF-based fault detection and isolation for PMSM inverter. Sustain. Energy Technol. Assess. 2022, 52, 101846. [Google Scholar] [CrossRef]
- Namdar, A.; Samet, H.; Allahbakhshi, M.; Tajdinian, M.; Ghanbari, T. A robust stator inter-turn fault detection in induction motor utilizing Kalman filter-based algorithm. Measurement 2022, 187, 110181. [Google Scholar] [CrossRef]
- Prasad, B.J.; Ram, B.V. Inter-turn fault analysis of synchronous generator using finite element method (fem). Int. J. Innov. Technol. Explor. Eng. 2013, 3, 170–176. [Google Scholar]
- Ebrahimi, B.M.; Faiz, J.; Javan-Roshtkhari, M.; Nejhad, A.Z. Static eccentricity fault diagnosis in permanent magnet synchronous motor using time stepping finite element method. IEEE Trans. Magn. 2008, 44, 4297–4300. [Google Scholar] [CrossRef]
- Fitouri, M.; BenSalem, Y.; Abdelkrim, M.N. Analysis and co-simulation of permanent magnet sychronous motor with short-circuit fault by finite element method. In Proceedings of the 13th International Multi-Conference on Systems, Signals and Devices, SSD, Leipzig, Germany, 21–24 March 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 472–477. [Google Scholar] [CrossRef]
- Huang, W.; Luo, L.; Du, J.; Xiang, B.; Mei, S.; Zhou, L.; Fan, Q. Open-Circuit Fault Detection in PMSM Drives Using Model Predictive Control and Cost Function Error. IEEE Trans. Transp. Electrif. 2022, 8, 2667–2675. [Google Scholar] [CrossRef]
- Wang, F.; Li, S.; Mei, X.; Xie, W.; Rodriguez, J.; Kennel, R.M. Model-based predictive direct control strategies for electrical drives: An experimental evaluation of PTC and PCC methods. IEEE Trans. Ind. Inform. 2015, 11, 671–681. [Google Scholar] [CrossRef]
- Hang, J.; Wu, H.; Zhang, J.; Ding, S.; Huang, Y.; Hua, W. Cost Function-Based Open-Phase Fault Diagnosis for PMSM Drive System With Model Predictive Current Control. IEEE Trans. Power Electron. 2021, 36, 2574–2583. [Google Scholar] [CrossRef]
- Huang, W.; Du, J.; Hua, W.; Lu, W.; Bi, K.; Zhu, Y.; Fan, Q. Current-Based Open-Circuit Fault Diagnosis for PMSM Drives With Model Predictive Control. IEEE Trans. Power Electron. 2021, 36, 10695–10704. [Google Scholar] [CrossRef]
- Sahin, I.; Keysan, O. Model Predictive Controller Utilized as an Observer for Inter-Turn Short Circuit Detection in Induction Motors. IEEE Trans. Energy Convers. 2021, 36, 1449–1458. [Google Scholar] [CrossRef]
- Reigosa, D.; Fernández, D.; Park, Y.; Diez, A.B.; Lee, S.B.; Briz, F. Detection of demagnetization in permanent magnet synchronous machines using hall-effect sensors. IEEE Trans. Ind. Appl. 2018, 54, 3338–3349. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Demagnetization fault diagnosis in surface mounted permanent magnet synchronous motors. IEEE Trans. Magn. 2013, 49, 1185–1192. [Google Scholar] [CrossRef]
- Elbouchikhi, E.; Choqueuse, V.; Auger, F.; Benbouzid, M.E.H. Motor current signal analysis based on a matched subspace detector. IEEE Trans. Instrum. Meas. 2017, 66, 3260–3270. [Google Scholar] [CrossRef]
- Alvarez-Gonzalez, F.; Griffo, A.; Wang, B. Permanent magnet synchronous machine stator windings fault detection by Hilbert–Huang transform. J. Eng. 2019, 2019, 3505–3509. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Comparison of selected methods for the stator winding condition monitoring of a pmsm using the stator phase currents. Energies 2021, 14, 1630. [Google Scholar] [CrossRef]
- Krichen, M.; Elbouchikhi, E.; Benhadj, N.; Chaieb, M.; Benbouzid, M.; Neji, R. Motor current signature analysis-based permanent magnet synchronous motor demagnetization characterization and detection. Machines 2020, 8, 35. [Google Scholar] [CrossRef]
- Jiang, C.; Liu, H.; Chen, D. A novel fault detection of igbt open—Circuit failure in five-phase open-end winding PMSM drive system. In Proceedings of the 2020 IEEE 1st China International Youth Conference on Electrical Engineering, CIYCEE, Wuhan, China, 1–4 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Huang, W.; Du, J.; Hua, W.; Fan, Q. An open-circuit fault diagnosis method for PMSM drives using symmetrical and DC components. Chin. J. Electr. Eng. 2021, 7, 124–135. [Google Scholar] [CrossRef]
- El Khil, S.K.; Jlassi, I.; Cardoso, A.J.M.; Estima, J.O.; Mrabet-Bellaaj, N. Diagnosis of Open-Switch and Current Sensor Faults in PMSM Drives Through Stator Current Analysis. IEEE Trans. Ind. Appl. 2019, 55, 5925–5937. [Google Scholar] [CrossRef]
- Goncalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Open-Phase Fault Diagnosis in Six-Phase PMSM Drives Based on the Harmonics of the Measured Secondary Subspace Currents. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Singapore, 18–21 October 2020; IEEE Computer Society: Washington, DC, USA, 2020; pp. 4863–4868. [Google Scholar] [CrossRef]
- Wu, X.; Chen, C.-Y.; Chen, T.-F.; Cheng, S.; Mao, Z.-H.; Yu, T.-J.; Li, K. A Fast and Robust Diagnostic Method for Multiple Open-Circuit Faults of Voltage-Source Inverters Through Line Voltage Magnitudes Analysis. IEEE Trans. Power Electron. 2020, 35, 5205–5220. [Google Scholar] [CrossRef]
- Ullah, Z.; Lee, S.T.; Hur, J. A novel fault diagnosis technique for IPMSM using voltage angle. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 3236–3243. [Google Scholar]
- Zhang, J.; Xu, Z.; Wang, J.; Zhao, J.; Din, Z.U.; Cheng, M. Detection and Discrimination of Incipient Stator Faults for Inverter-Fed Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 7505–7515. [Google Scholar] [CrossRef]
- Xing, M.; Ding, H.; Ren, X.; Wang, T.; Ge, S.; Shen, J. On the Accuracy of Rotor Demagnetization Fault Detection in PMSM Using Vibration-Based Condition Indicators. In Proceedings of the 2021 CAA Symposium on Fault Detection, Supervision, and Safety for Technical Processes, Safeprocess, Chengdu, China, 17–18 December 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Fan, W.; Zhou, Q.; Li, J.; Zhu, Z. A Wavelet-Based Statistical Approach for Monitoring and Diagnosis of Compound Faults With Application to Rolling Bearings. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1563–1572. [Google Scholar] [CrossRef]
- Da, Y.; Shi, X.; Krishnamurthy, M. A new approach to fault diagnostics for permanent magnet synchronous machines using electromagnetic signature analysis. IEEE Trans. Power Electron. 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Lv, X.; Zheng, X. A Diagnosis Method for Inter-turn Short-circuit Fault of A Nine-phase Permanent Magnet Synchronous Motor Based on Search Coil. In Proceedings of the 2022 International Conference on Electrical Machines and Systems, ICEMS, Chiang Mai, Thailand, 29 November–2 December; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Huang, W.; Du, B.; Li, T.; Sun, Y.; Cheng, Y.; Cui, S. Interturn Short-Circuit Fault Diagnosis of Interior Permanent Magnet Synchronous Motor for Electric Vehicle Based on Search Coil. IEEE Trans. Power Electron. 2023, 38, 2506–2515. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, L.; Yan, Z.; Li, Y.; Su, X.; Song, W. Diagnosis and distinguishment of open-switch and current sensor faults in PMSM drives using improved regularized extreme learning machine. Mech. Syst. Signal Process. 2022, 171, 108866. [Google Scholar] [CrossRef]
- Okada, K.F.A.; de Morais, A.S.; Oliveira-Lopes, L.C.; Ribeiro, L. A survey on fault detection and diagnosis methods. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications, Induscon, São Paulo, Brazil, 15–18 August 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 1422–1429. [Google Scholar] [CrossRef]
- Tang, M.; Zhao, Q.; Wu, H.; Wang, Z.; Meng, C.; Wang, Y. Review and perspectives of machine learning methods for wind turbine fault diagnosis. Front. Energy Res. 2021, 9, 751066. [Google Scholar] [CrossRef]
- Zhou, S.; Ma, C.; Wang, Y.; Wang, D.; He, Y.-L.; Bu, F.; Wang, M. A New Data-Driven Diagnosis Method for Mixed Eccentricity in External Rotor Permanent Magnet Motors. IEEE Trans. Ind. Electron. 2022, 70, 11659–11669. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Machine Learning-Based Stator Current Data-Driven PMSM Stator Winding Fault Diagnosis. Sensors 2022, 22, 9668. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. On-line detection and classification of pmsm stator winding faults based on stator current symmetrical components analysis and the knn algorithm. Electronics 2021, 10, 1786. [Google Scholar] [CrossRef]
- Liu, R.; Wang, F.; Yang, B.; Qin, S.J. Multiscale Kernel Based Residual Convolutional Neural Network for Motor Fault Diagnosis Under Nonstationary Conditions. IEEE Trans. Ind. Inform. 2020, 16, 3797–3806. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Milhem, A.S.; Nemer, I.A.; Al-Duwaish, H.; Abido, M.A. Convolutional Neural Network-Based Inter-Turn Fault Diagnosis in LSPMSMs. IEEE Access 2020, 8, 81960–81970. [Google Scholar] [CrossRef]
- Skowron, M.; Kowalski, C.T.; Orlowska-Kowalska, T. Impact of the Convolutional Neural Network Structure and Training Parameters on the Effectiveness of the Diagnostic Systems of Modern AC Motor Drives. Energies 2022, 15, 7008. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Kao, I.-H.; Wang, W.-J.; Lai, Y.-H.; Perng, J.-W. Analysis of Permanent Magnet Synchronous Motor Fault Diagnosis Based on Learning. IEEE Trans. Instrum. Meas. 2019, 68, 310–324. [Google Scholar] [CrossRef]
- Arellano-Espitia, F.; Delgado-Prieto, M.; Martinez-Viol, V.; Saucedo-Dorantes, J.J.; Osornio-Rios, R.A. Deep-learning-based methodology for fault diagnosis in electromechanical systems. Sensors 2020, 20, 3949. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, H.; Koo, G.; Ban, J.; Kim, S.W. Attention Recurrent Neural Network-Based Severity Estimation Method for Interturn Short-Circuit Fault in Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 3445–3453. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Cai, F.; Zhang, H.; Zhao, W.; Gerada, C. PWM-VSI Fault Diagnosis for a PMSM Drive Based on the Fuzzy Logic Approach. IEEE Trans. Power Electron. 2018, 34, 759–768. [Google Scholar] [CrossRef]
- Hang, J.; Shu, X.; Ding, S.; Huang, Y. Robust Open-Circuit Fault Diagnosis for PMSM Drives Using Wavelet Convolutional Neural Network with Small Samples of Normalized Current Vector Trajectory Graph. IEEE Trans. Ind. Electron. 2023, 70, 7653–7663. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Based on Stator Current Signal Processing and Machine Learning Algorithms. Sensors 2023, 23, 1757. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Detection of Permanent Magnet Damage of PMSM Drive Based on Direct Analysis of the Stator Phase Currents Using Convolutional Neural Network. IEEE Trans. Ind. Electron. 2022, 69, 13665–13675. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, X.; Qin, G.; Xie, J.; Peng, J.; Huang, S.; Long, Z.; Tang, Y. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Using Magnetic Leakage Signals. IEEE Trans. Ind. Inform. 2022, 19, 6105–6116. [Google Scholar] [CrossRef]
- Chang, L.-K.; Wang, S.-H.; Tsai, M.-C. Demagnetization fault diagnosis of a PMSM using auto-encoder and k-means clustering. Energies 2020, 13, 4467. [Google Scholar] [CrossRef]
- Shih, K.-J.; Hsieh, M.-F.; Chen, B.-J.; Huang, S.-F. Machine Learning for Inter-Turn Short-Circuit Fault Diagnosis in Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2022, 58, 8204307. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Application of simplified convolutional neural networks for initial stator winding fault detection of the PMSM drive using different raw signal data. IET Electr. Power Appl. 2021, 15, 932–946. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M.; Orlowska-Kowalska, T. PMSM Stator Winding Fault Detection and Classification Based on Bispectrum Analysis and Convolutional Neural Network. IEEE Trans. Ind. Electron. 2022, 70, 5192–5202. [Google Scholar] [CrossRef]
- Kashyap, K.S.; Kumar, N.P.; Balakrishnan, P. Application of Machine Learning for Analysis of Static Eccentricity Fault in IPMSM using Finite Element Method. In Proceedings of the 2021 National Power Electronics Conference, NPEC, Bhubaneswar, India, 15–17 December 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Chen, Z.; Tian, S.; Shi, X.; Lu, H. Multiscale Shared Learning for Fault Diagnosis of Rotating Machinery in Transportation Infrastructures. IEEE Trans. Ind. Inform. 2023, 19, 447–458. [Google Scholar] [CrossRef]
- Dalvand, F.; Dalvand, S.; Sharafi, F.; Pecht, M. Current Noise Cancellation for Bearing Fault Diagnosis Using Time Shifting. IEEE Trans. Ind. Electron. 2017, 64, 8138–8147. [Google Scholar] [CrossRef]
- Goyal, D.; Choudhary, A.; Pabla, B.S.; Dhami, S.S. Support vector machines based non-contact fault diagnosis system for bearings. J. Intell. Manuf. 2020, 31, 1275–1289. [Google Scholar] [CrossRef]
- Toma, R.N.; Piltan, F.; Im, K.; Shon, D.; Yoon, T.H.; Yoo, D.-S.; Kim, J.-M. A Bearing Fault Classification Framework Based on Image Encoding Techniques and a Convolutional Neural Network under Different Operating Conditions. Sensors 2022, 22, 4881. [Google Scholar] [CrossRef]
- Jankowska, K.; Dybkowski, M. Design and Analysis of Current Sensor Fault Detection Mechanisms for PMSM Drives Based on Neural Networks. Designs 2022, 6, 18. [Google Scholar] [CrossRef]
- Jankowska, K.; Dybkowski, M. Experimental Analysis of the Current Sensor Fault Detection Mechanism Based on Neural Networks in the PMSM Drive System. Electronics 2023, 12, 1170. [Google Scholar] [CrossRef]
- Du, Y.; Member, S.; Li, C.; Zheng, Z.; Member, S. An Online Metric Learning-Based Open-Switch and Current Sensor Fault Diagnosis for Multi-Sector PMSM Systems. IEEE Trans. Power Electron. 2023, 38, 8966–8976. [Google Scholar] [CrossRef]
- Tomasov, M.; Kajanova, M.; Bracinik, P.; Motyka, D. Overview of battery models for sustainable power and transport applications. Transp. Res. Procedia 2019, 40, 548–555. [Google Scholar] [CrossRef]
- Dey, S.; Biron, Z.A.; Tatipamula, S.; Das, N.; Mohon, S.; Ayalew, B.; Pisu, P. On-board thermal fault diagnosis of lithium-ion batteries for hybrid electric vehicle application. IFAC-PapersOnLine 2015, 48, 389–394. [Google Scholar] [CrossRef]
- Dey, S.; Perez, H.E.; Moura, S.J. Model-Based Battery Thermal Fault Diagnostics: Algorithms, Analysis, and Experiments. IEEE Trans. Control. Syst. Technol. 2019, 27, 576–587. [Google Scholar] [CrossRef]
- Yao, L.; Fang, Z.; Xiao, Y.; Hou, J.; Fu, Z. An Intelligent Fault Diagnosis Method for Lithium Battery Systems Based on Grid Search Support Vector Machine. Energy 2020, 214, 118866. [Google Scholar] [CrossRef]
- Cheng, Y.; D’Arpino, M.; Rizzoni, G. Fault Diagnosis in Lithium-ion Battery of Hybrid Electric Aircraft based on Structural Analysis. In Proceedings of the 2022 IEEE Transportation Electrification Conference and Expo, ITEC, Anaheim, CA, USA, 15–17 June 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 997–1004. [Google Scholar] [CrossRef]
- Xiong, R.; Yang, R.; Chen, Z.; Shen, W.; Sun, F. Online Fault Diagnosis of External Short Circuit for Lithium-Ion Battery Pack. IEEE Trans. Ind. Electron. 2020, 67, 1081–1091. [Google Scholar] [CrossRef]
- Liu, Z.; He, H. Model-based sensor fault diagnosis of a lithium-ion battery in electric vehicles. Energies 2015, 8, 6509–6527. [Google Scholar] [CrossRef] [Green Version]
- Xiong, R.; Yu, Q.; Shen, W.; Lin, C.; Sun, F. A Sensor Fault Diagnosis Method for a Lithium-Ion Battery Pack in Electric Vehicles. IEEE Trans. Power Electron. 2019, 34, 9709–9718. [Google Scholar] [CrossRef]
- Lai, X.; Yi, W.; Kong, X.; Han, X.; Zhou, L.; Sun, T.; Zheng, Y. Online detection of early stage internal short circuits in series-connected lithium-ion battery packs based on state-of-charge correlation. J. Energy Storage 2020, 30, 101514. [Google Scholar] [CrossRef]
- Yang, R.; Xiong, R.; Shen, W. On-board diagnosis of soft short circuit fault in lithium-ion battery packs for electric vehicles using an extended Kalman filter. CSEE J. Power Energy Syst. 2022, 8, 258–270. [Google Scholar] [CrossRef]
- Zhang, K.; Hu, X.; Liu, Y.; Lin, X.; Liu, W. Multi-fault detection and isolation for lithium-ion battery systems. IEEE Trans. Power Electron. 2022, 37, 971–989. [Google Scholar] [CrossRef]
- Jiang, J.; Cong, X.; Li, S.; Zhang, C.; Zhang, W.; Jiang, Y. A Hybrid Signal-Based Fault Diagnosis Method for Lithium-Ion Batteries in Electric Vehicles. IEEE Access 2021, 9, 19175–19186. [Google Scholar] [CrossRef]
- Li, X.; Dai, K.; Wang, Z.; Han, W. Lithium-ion batteries fault diagnostic for electric vehicles using sample entropy analysis method. J. Energy Storage 2020, 27, 101121. [Google Scholar] [CrossRef]
- Cai, T.; Mohtat, P.; Stefanopoulou, A.G.; Siegel, J.B. Li-ion battery fault detection in large packs using force and gas sensors. IFAC-PapersOnLine 2020, 53, 12491–12496. [Google Scholar] [CrossRef]
- Yao, L.; Xiao, Y.; Gong, X.; Hou, J.; Chen, X. A novel intelligent method for fault diagnosis of electric vehicle battery system based on wavelet neural network. J. Power Source 2020, 453, 227870. [Google Scholar] [CrossRef]
- Li, D.; Liu, P.; Zhang, Z.; Zhang, L.; Deng, J.; Wang, Z.; Dorrell, D.G.; Li, W.; Sauer, D.U. Battery Thermal Runaway Fault Prognosis in Electric Vehicles Based on Abnormal Heat Generation and Deep Learning Algorithms. IEEE Trans. Power Electron. 2022, 37, 8513–8525. [Google Scholar] [CrossRef]
- Li, D.; Zhang, Z.; Liu, P.; Wang, Z.; Zhang, L. Battery Fault Diagnosis for Electric Vehicles Based on Voltage Abnormality by Combining the Long Short-Term Memory Neural Network and the Equivalent Circuit Model. IEEE Trans. Power Electron. 2021, 36, 1303–1315. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, S.; Hu, X. A Fault Diagnosis Method for Lithium-Ion Battery Packs Using Improved RBF Neural Network. Front. Energy Res. 2021, 9, 702139. [Google Scholar] [CrossRef]
- Deng, F.; Bian, Y.; Zheng, H. Fault diagnosis for electric vehicle lithium batteries using a multi-classification support vector machine. Electr. Eng. 2022, 104, 1831–1837. [Google Scholar] [CrossRef]
Figure 1.
Various electric motor drive faults.

Figure 2.
Interturn short-circuit fault in one phase winding of PMSM [8].
Figure 2.
Interturn short-circuit fault in one phase winding of PMSM [8].

Figure 3.
m-phase inverter of an electric motor [27].
Figure 3.
m-phase inverter of an electric motor [27].

Figure 4.
Various battery faults.

Figure 5.
PMSM motor drive schematic with FDD and fault-tolerant control.

Figure 6.
Different classes of FDD methods.

Figure 7.
General diagram of model-based FDD workflow [53].
Figure 7.
General diagram of model-based FDD workflow [53].

Figure 8.
General diagram of state-observer FDD configuration [62].
Figure 8.
General diagram of state-observer FDD configuration [62].

Figure 9.
Kalman filter flowchart [76].
Figure 9.
Kalman filter flowchart [76].

Figure 10.
General signal-based FDD methods workflow.

Figure 11.
Data-driven FDD workflow.

Figure 12.
SVM principle [109].
Figure 12.
SVM principle [109].

Figure 13.
KNN principle [110].
Figure 13.
KNN principle [110].

Figure 16.
Fuzzy control schematic [118].
Figure 16.
Fuzzy control schematic [118].


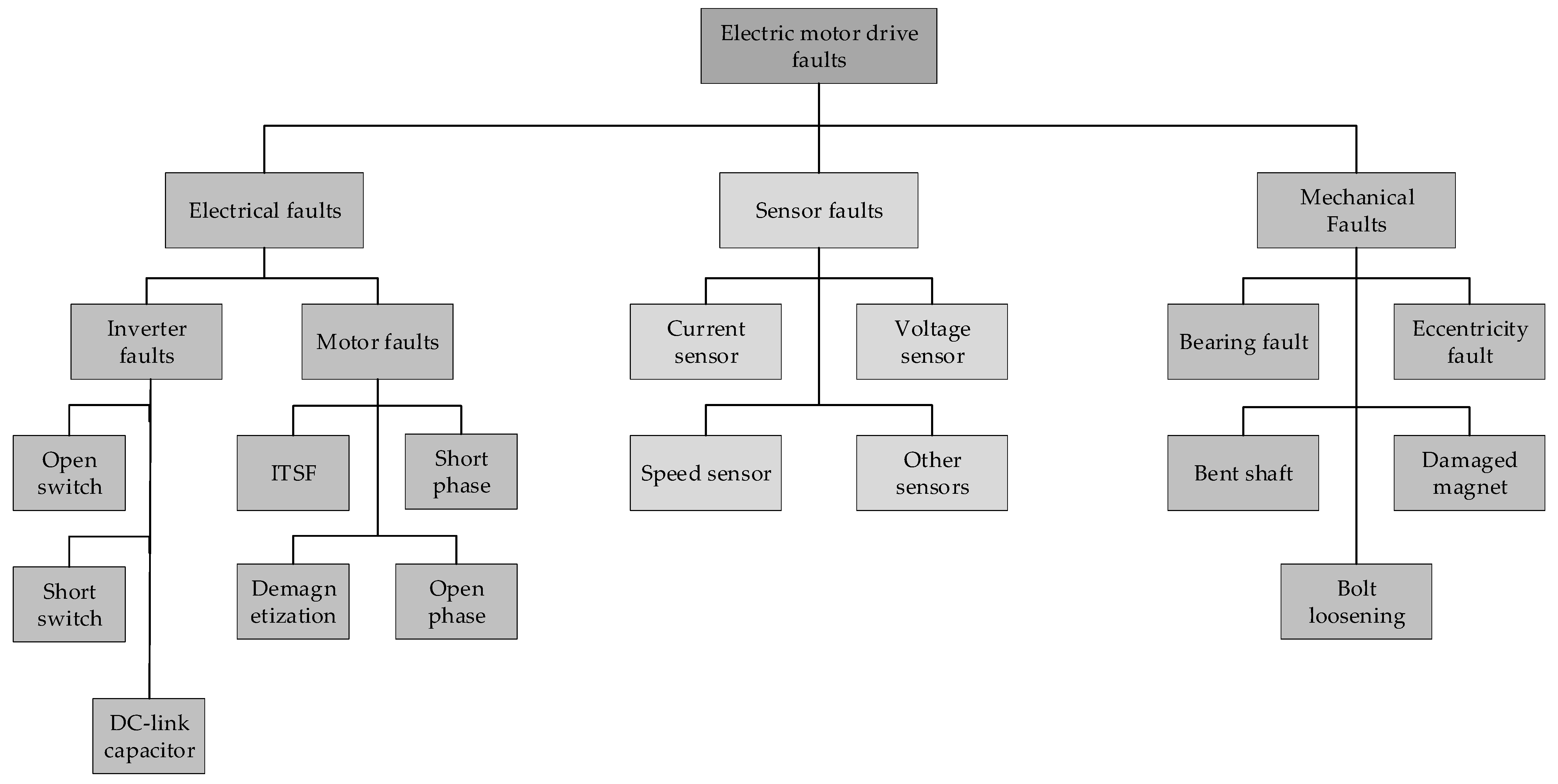{kind=link}
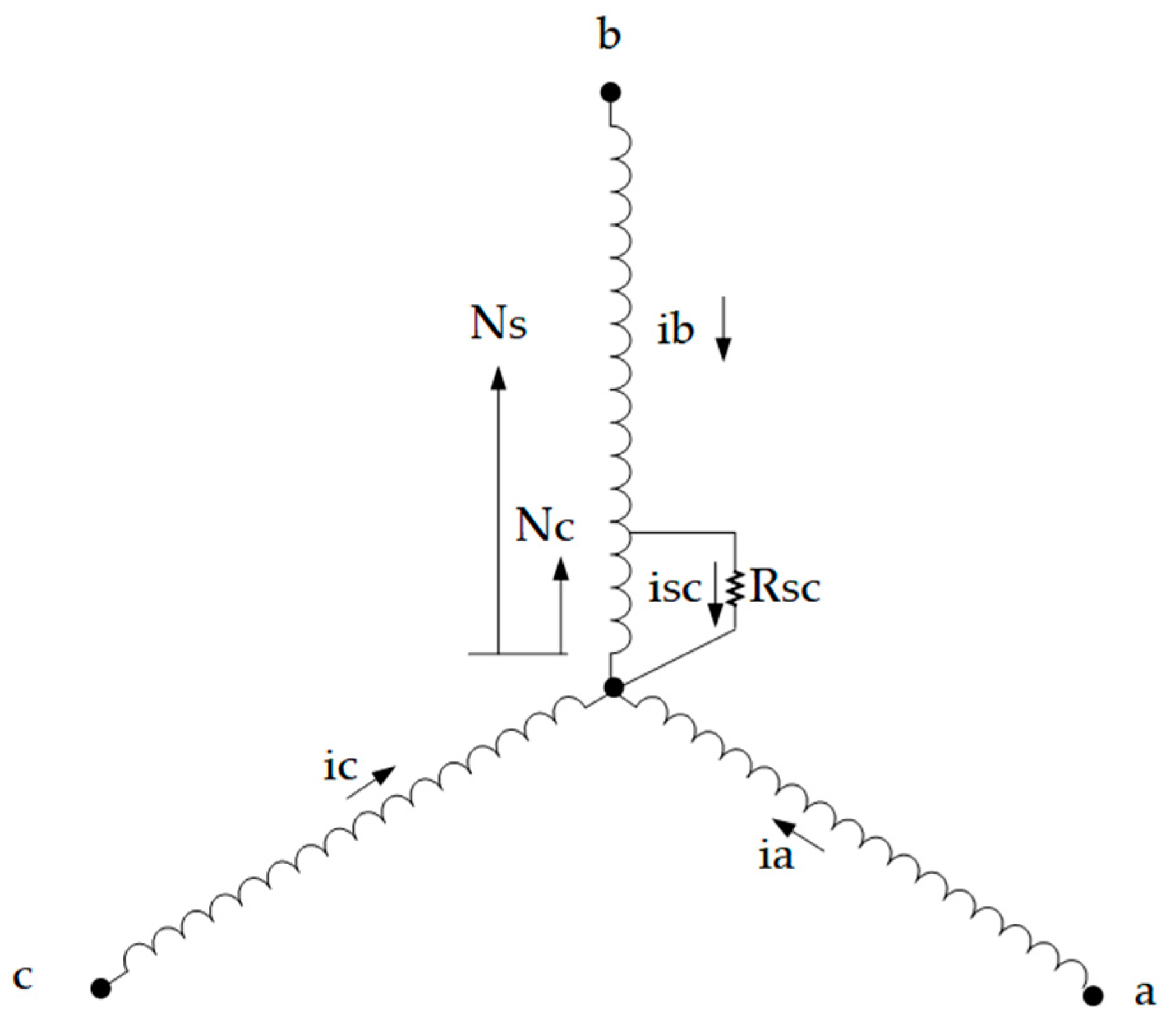{kind=link}
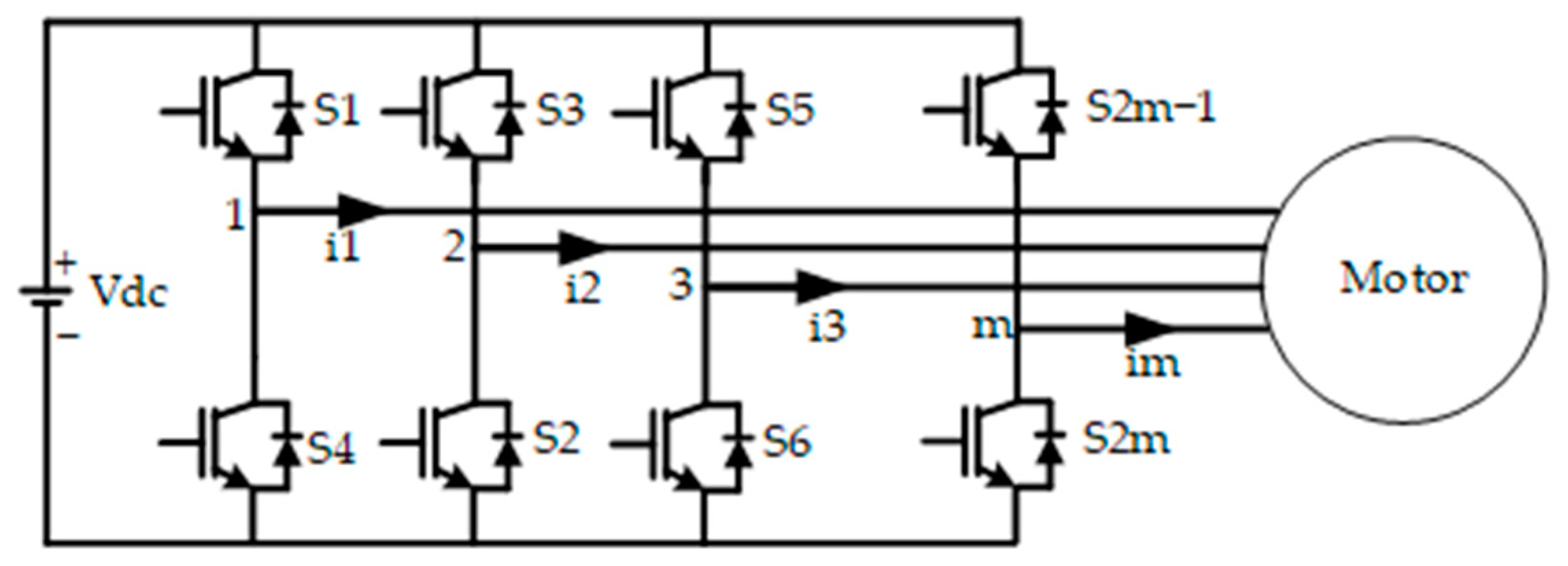{kind=link}
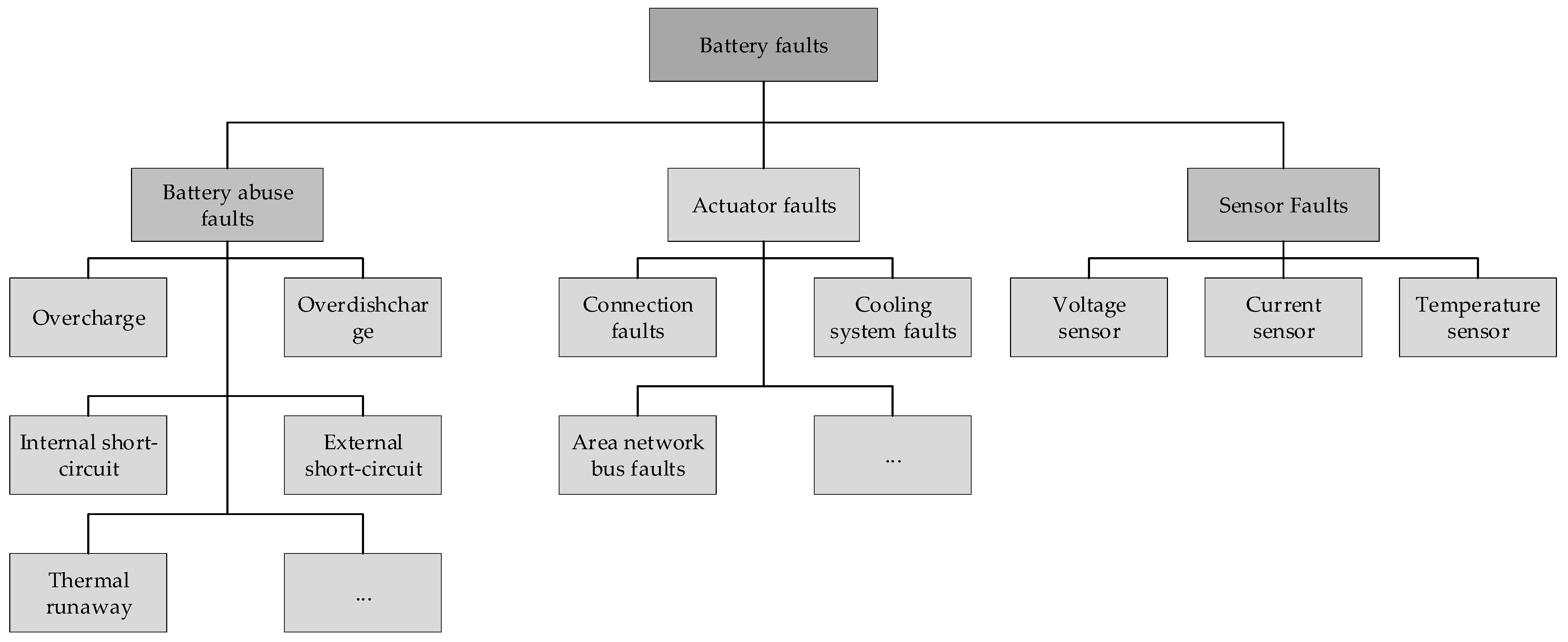{kind=link}
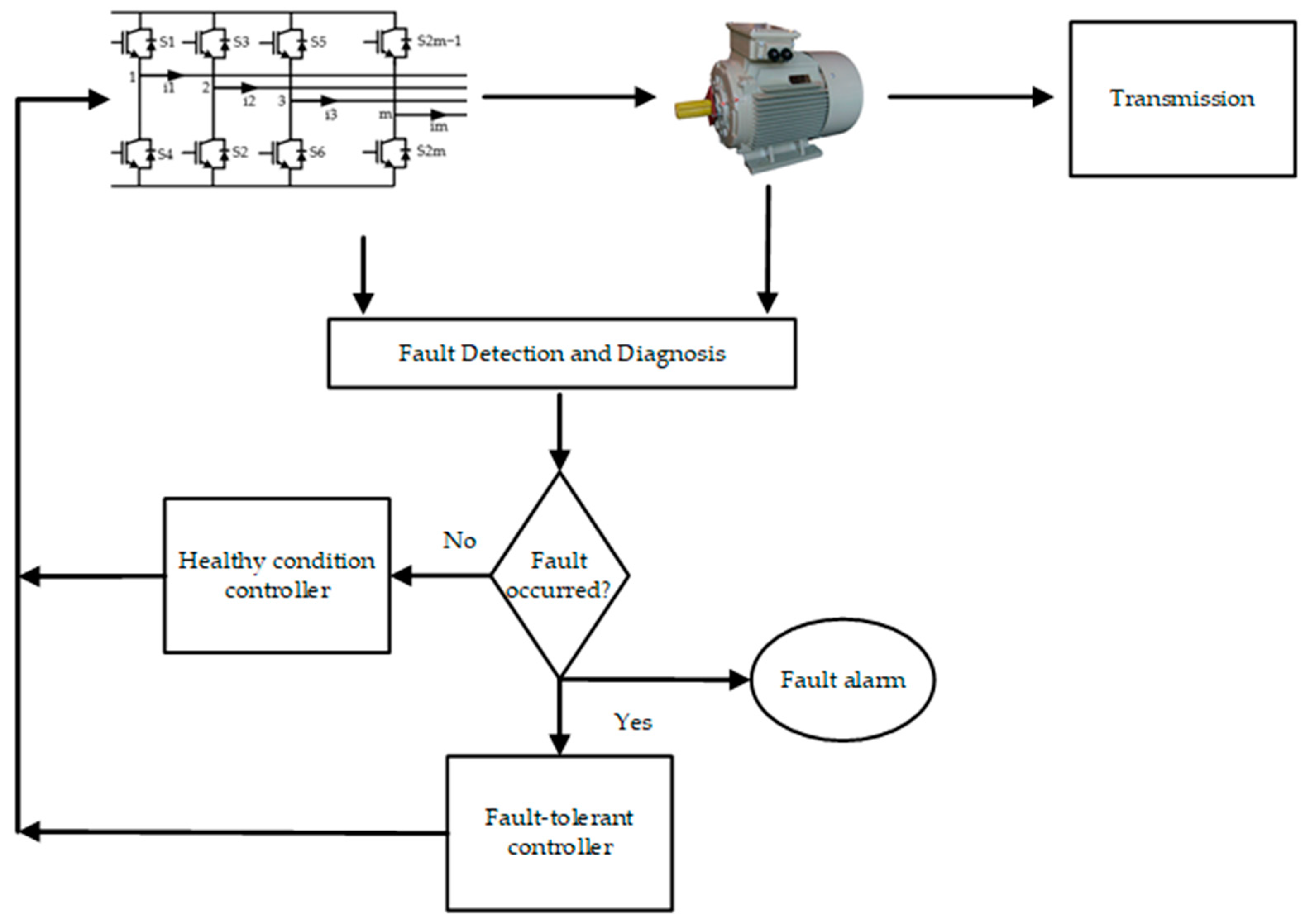{kind=link}
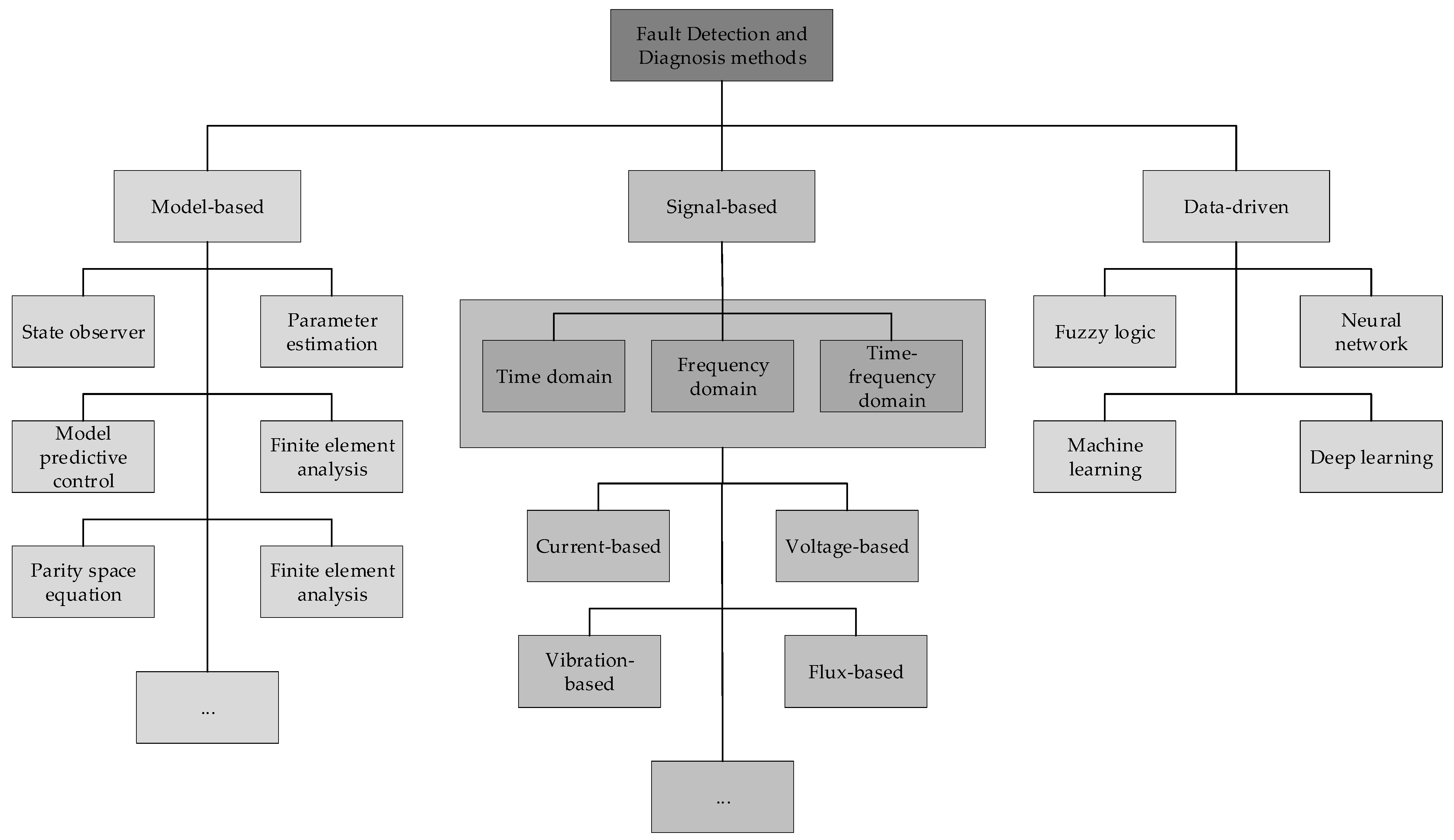{kind=link}
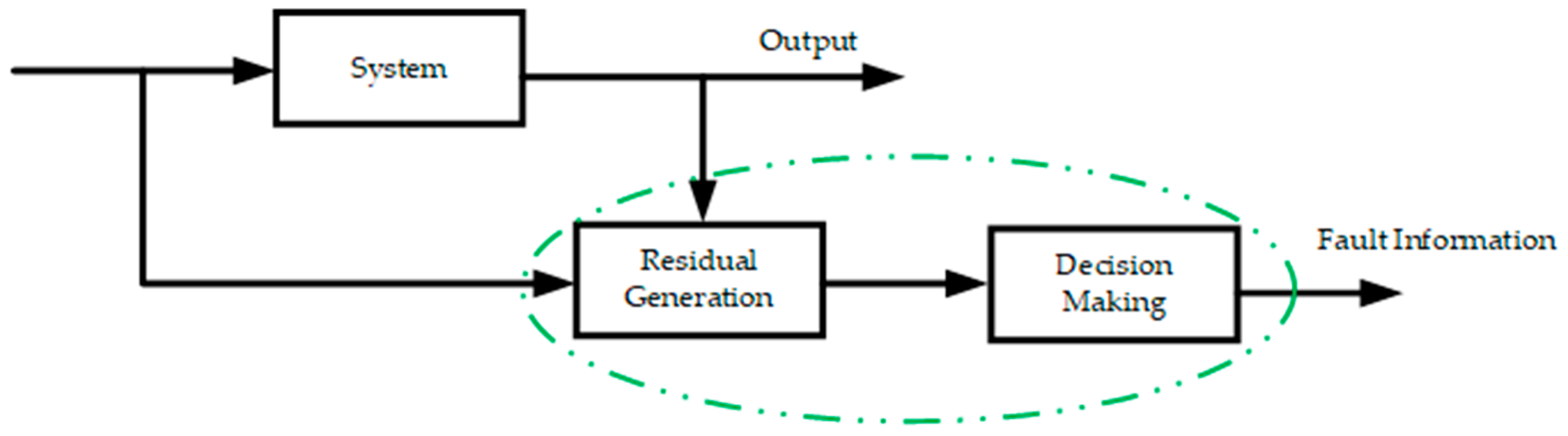{kind=link}
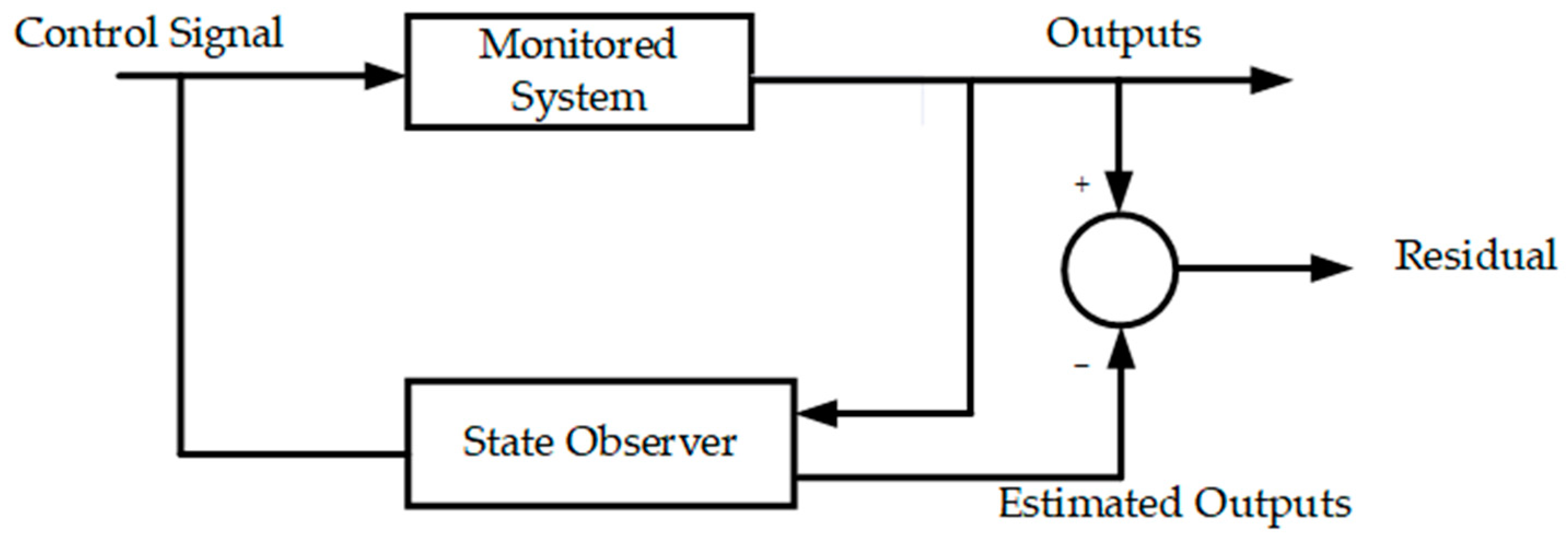{kind=link}
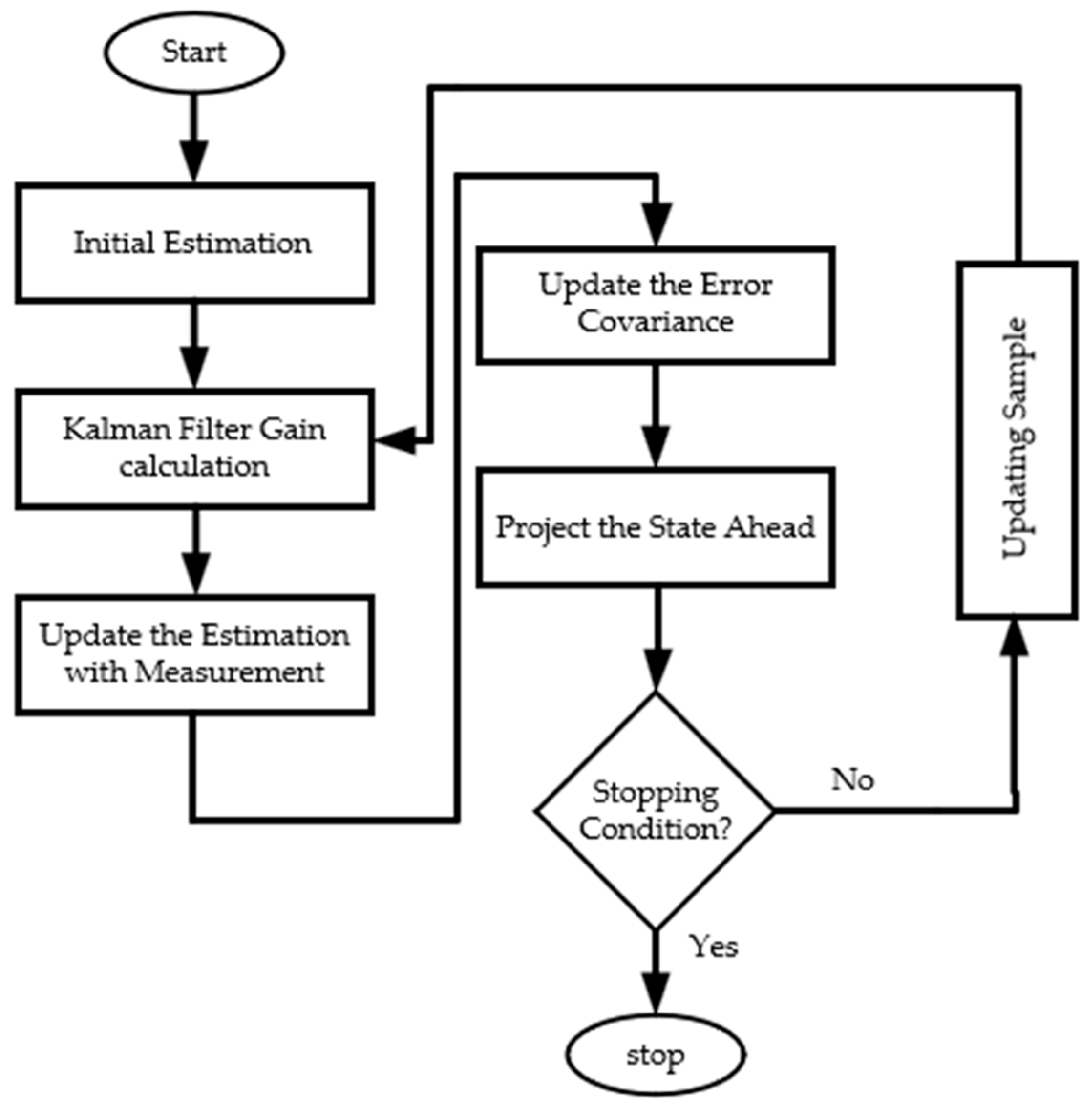{kind=link}
{kind=link}
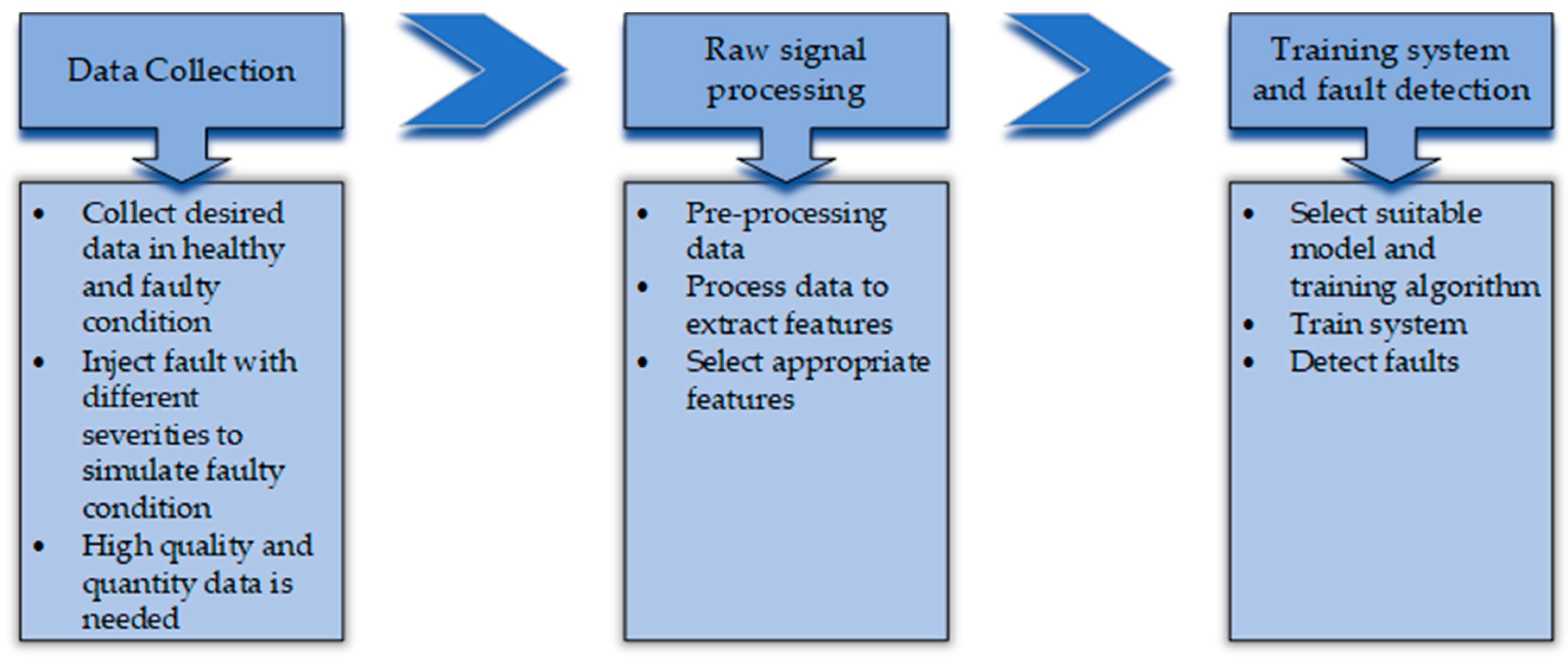{kind=link}
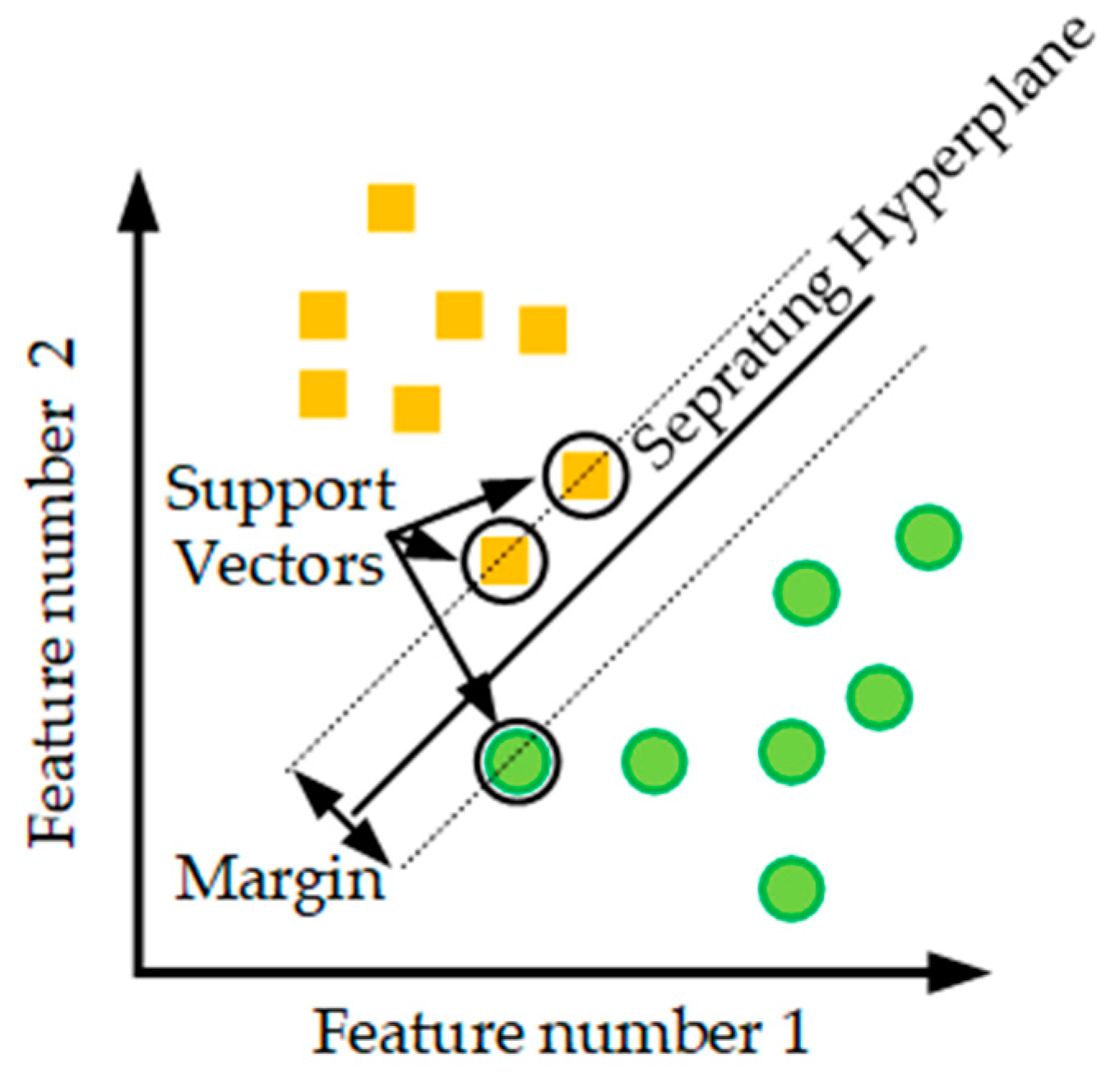{kind=link}
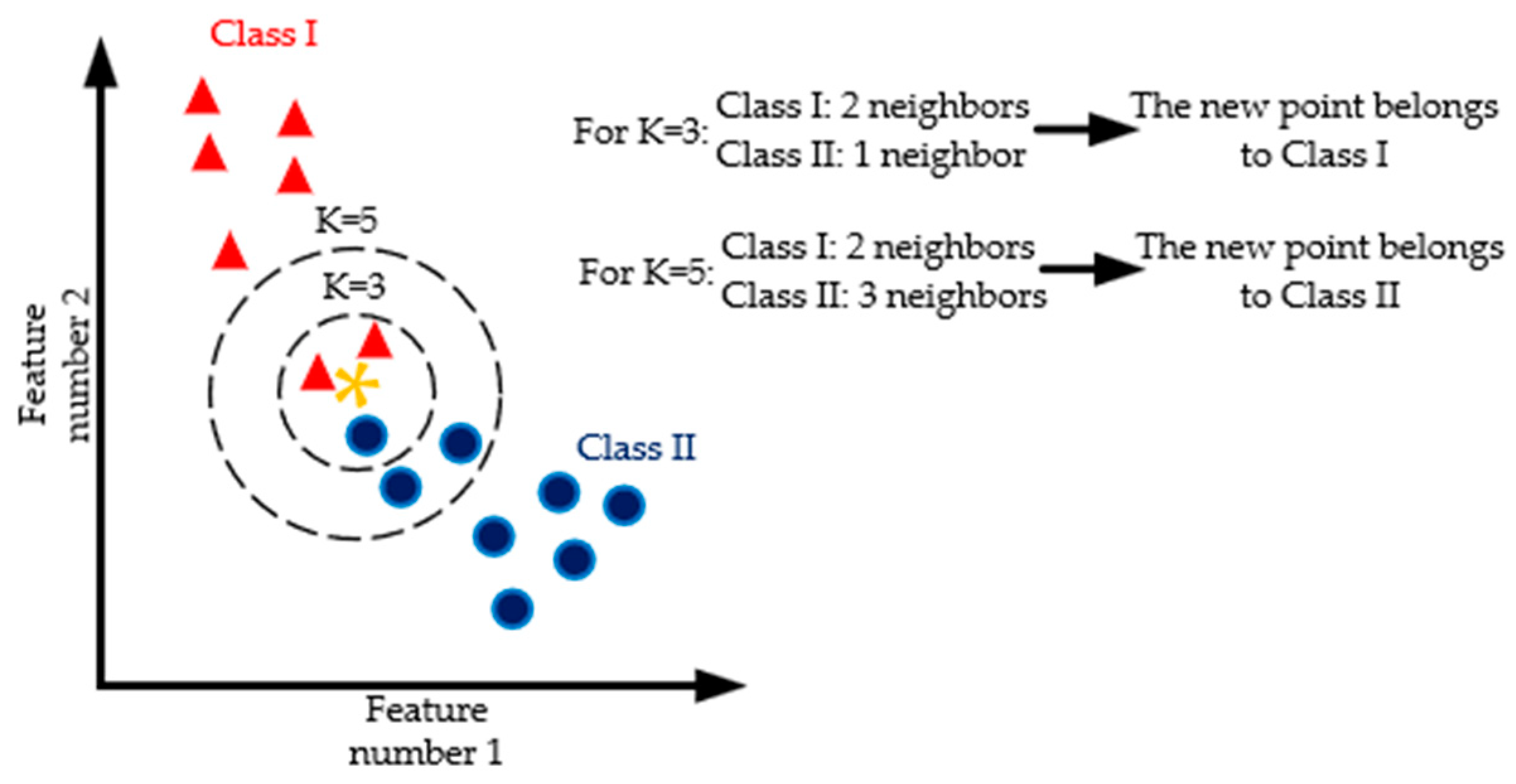{kind=link}
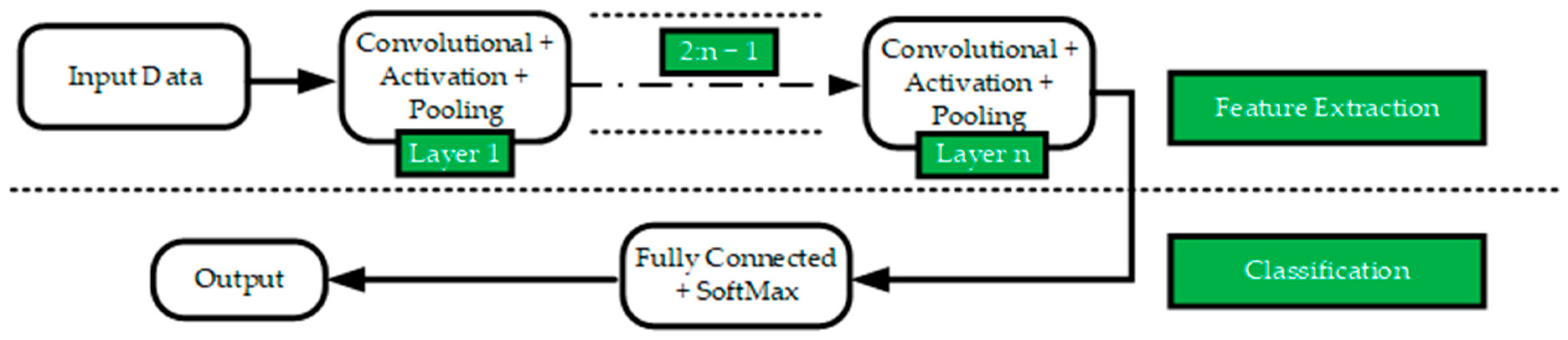{kind=link}
{kind=link}
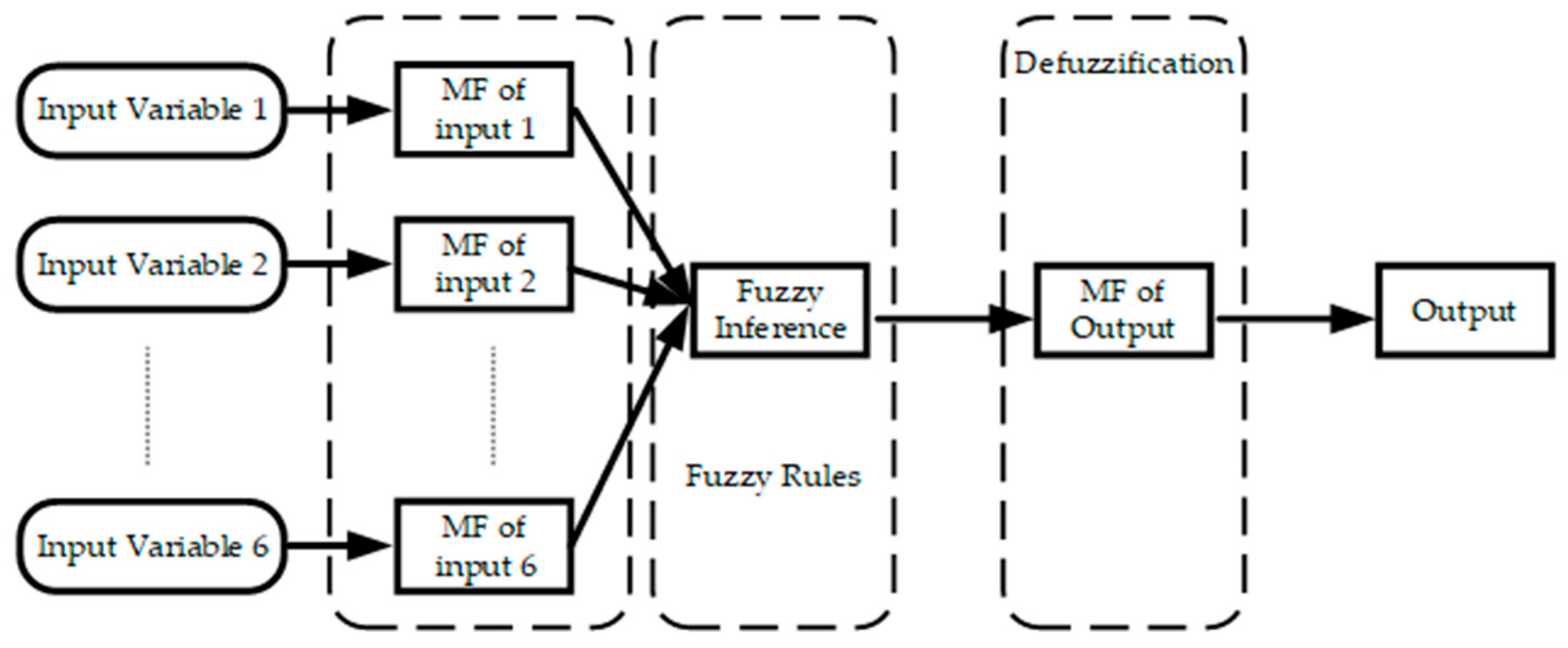{kind=link}
Table 1.
Summary of FDD categories.
| Type | Basis | Features |
|---|---|---|
| Model-based | Using the system model and the estimated parameters for fault detection | Very effective and reliable for simple systems Low cost and fast detection Modelling complex systems is difficult Uncertainties affect the model Sensitive to load and parameters variations Prior knowledge and model are needed |
| Signal-based | Using output signal and signal-processing methods for fault detection | Easy implementation Suitable for complex systems Slow detection speed or high cost for faster detection methods due to the need for extra hardware |
| Data-driven | Using historical data for training the system and fault detection | No prior knowledge needed No system model or signal pattern needed Suitable for complex systems Generalization capability High accuracy, even for incipient fault detection Quality and quantity of the historical data can affect FDD performance |
Table 2.
Summary of the reviewed model-based FDD methods.
| Method | Fault Index | Fault(s) | Features | Ref. |
|---|---|---|---|---|
| Voltage observer | voltage | Open circuit | No extra hardware needed | [54] |
| Stator flux linkage DC-offset observer | Flux linkage | Stator faults | High accuracy Low computational complexity Suitable for real-time FDD | [57] |
| Current observer | current | ITSF | Stationary and transient condition High accuracy and low false alarm | [58] |
| Luenberger Observer | current | Open switch Current sensor fault | Adaptive threshold Stationary and transient condition Robust to machine parameter and load variations High accuracy and low false alarm | [46] |
| Current observer | current | Open switch | Adaptive threshold Stationary and transient condition Robust to machine parameter and load variations Fast detection High accuracy | [61] |
| Luenberger observer | Current | Encoder fault | Different speed range | [64] |
| Sliding mode observer | Flux | Demagnetization | Operating condition independent Suitable for real-time FDD | [66] |
| Sliding mode observer | Resistance | ITSF | Locating and estimating fault severity | [67] |
| Parameter estimation | Current | Current sensor fault | Multiple sensor fault detection Robust to motor imbalance | [68] |
| Parameter estimation + Machine learning | Resistance Inductance Voltage | ITSF | Combine model-based and machine learning for fault detection | [69] |
| Parameter estimation | Flux linkage | Demagnetization | Flux linkage estimation based on the varying inductance to improve reliability | [70] |
| Parameter estimation | Current Voltage Rotor angle | ITSF | Locating and estimating fault severity | [71] |
| EKF | Resistance | Open switch | Fault detection and isolation | [75] |
| FEA | Reactance | ITSC | Incipient fault detection High computational cost | [77] |
| FEA + ANN | Current Torque | Eccentricity | Robust to noise | [78] |
| MPC | Current | Open switch | Fast detection Single and multiple switch fault detection Robust to the motor parameter and operation condition | [80] |
| MPC | Current | Open phase | Robust against operation point and parameter variations Simple implementation | [81] |
| MPC | current | Open switch | Fast detection Robust against operation point Detection of 21 combinations of open-switch fault in 3-phase inverters | [82] |
| MPC | Voltage | ITSF | Low computational load | [83] |
Table 3.
Summary of the introduced signal-based FDD methods.
| Method | Fault Index | Fault(s) | Features | Ref. |
|---|---|---|---|---|
| FEM + MCSA + FFT | Current | Partial demagnetization | Early fault detection Cost-effective High computational load Not suitable for uniform demagnetization | [91] |
| ZSC | Current | Open switch | Fast detection | [92] |
| Symmetrical components | Current | Open switch | Fast detection Multiple open-switch fault detection | [93] |
| Normalized average | Current | Open switch Current sensor fault | Better rapidity Cost-effective Robust to false alarms Detection and isolation of 27 open circuit faults Stationary and non-stationary conditions | [94] |
| Secondary subspace analysis | Current | Open phase | Independent of motor parameters and operating condition | [95] |
| Magnitude analysis | Voltage | Open switch | Very fast detection Robust to various control methods and false alarms | [96] |
| Voltage angle analysis | Voltage | ITSF Demagnetization Eccentricity | No extra hardware needed Multi-fault detection | [97] |
| ZSVC + High-frequency signal injection | Voltage | ITSF Resistive unbalance fault | Robust to speed and load variations | [98] |
| FFT + Chebyshev’s inequity + Machine learning | vibration | Demagnetization | Severity estimation High accuracy | [99] |
| DSW | Vibration | Bearing fault | Not suitable for detecting bearing fault type | [100] |
| FEA + Search coil | Magnetic flux Induced voltage | ITSF | Fast and accurate Early-stage fault detection | [102] |
| Search coil + NSVC | Induced voltage | ITSF | Reduced cost Robust to speed and load Stationary and non-stationary conditions | [104] |
| Using Hall-effect field sensor | Magnetic flux | Eccentricity Demagnetization | Robust to motor design and operating condition | [32] |
Table 4.
Summary of the reviewed data-driven FDD methods for electrical faults.
| Method | Fault Index | Feature Extraction Method | Faults | Features | Ref |
|---|---|---|---|---|---|
| Hybrid SVM & 2D-CNN | Current (iq) Voltage (vq) | ITSF | Very high accuracy Fewer samples for SVM Combining Model-based and data-driven | [124] | |
| Fuzzy logic | Current | Open switch | Single, multiple and intermittent fault detection and locating Robust to load variation Relatively slow detection with two fundamental periods for fault detection | [118] | |
| WCNN | Current | Open-switch | A small sample set needed | [119] | |
| 1D CNN | Current | Demagnetization Bearing fault | Can detect demagnetization, partial demagnetization and bearing fault with an accuracy of 98.8% at various speeds | [115] | |
| KNN & MLP | Current | STFT | Demagnetization | Simple structure Fast detection and training Very high accuracy | [120] |
| CNN | Current | Demagnetization | Incipient fault detection Detection during simultaneous ITSF fault Very fast detection and high accuracy Steady-state and transient condition applicable | [121] | |
| SSDRB | Magnetic leakage | WSCN | Demagnetization | High accuracy Few labelled data needed | [122] |
| Autoencoder & K-means | Current Voltage Speed Power Torque | Demagnetization | High accuracy Severity estimation No additional sensor | [123] | |
| CNN | Current | Bispectrum analysis | ITSF | High accuracy Low training time due to adding a pre-processing stage, but lower detection speed | [126] |
| CNN | Axial flux | ITSF | Simple structure with high accuracy Robust no operating condition Very fast detection | [125] | |
| RNN | Current Rotational speed | ITSF | ITSF severity estimation Incipient fault detection Applicable for different operating conditions | [117] |
Table 5.
Summary of the reviewed data-driven FDD methods for mechanical faults.
| Method | Fault Index | Feature Extraction Method | Faults | Features | Ref |
|---|---|---|---|---|---|
| BPNN + AM | EMF | FFT | Mixed eccentricity | Highly accurate Generalization capability Offline fault detection | [108] |
| KNN + FEA | Current | FFT | Static eccentricity | High accuracy Incipient fault detection | [127] |
| MLP RBF SOM | Vibration | FFT HHT | Bearing fault | Reaching 100% accuracy Cheap processor and easy implementation | [30] |
| 2D CNN | Current | Bearing faults | Accuracy of more than 99% Low computational time | [129] | |
| MK-ResCNN | Vibration | Rotor faults | Non-stationary condition fault detection Multiple rotor fault detection | [111] | |
| MSSLN | Vibration | Bearing fault | Non-stationary operation and varying conditions fault detection High accuracy | [128] | |
| SVM | Vibration | DWT | Bearing fault | Low cost non-contact vibration sensor | [130] |
| CNN | Speed | Bearing fault | No extra sensor Low cost High accuracy Fast | [31] |
Table 6.
Summary of the reviewed data-driven FDD methods for sensor faults.
| Method | Fault Index | Feature Extraction Method | Faults | Features | Ref |
|---|---|---|---|---|---|
| NN | Speed Current | Current sensor fault | Fast detection Accurate Low computational effort | [132] | |
| Metric Learning | Current | Current sensor fault Open switch | Fast detection Robustness Low computational effort | [134] | |
| MLP NN | Current | Current sensor fault | Fast detection High accuracy Stationary and non-stationary state | [133] |
Table 7.
Summary of reviewed EV battery faults detection.
| Method | Fault Index | Faults | Features | Ref | |
|---|---|---|---|---|---|
| Model-based | PDE observer | Temperature | Thermal faults | Robust and effective Simple | [137] |
| Structural analysis | current | Short circuit | Detecting both internal and external short circuit | [139] | |
| ECM | voltage | External short circuit | Online, fast and accurate detection Generalization capability | [140] | |
| ECM and EKF | voltage | Sensor fault | Simple | [141] | |
| Parameter estimation | SOC | Sensor fault | Simple and efficient | [142] | |
| EKF | SOC | Internal short circuit | Online, fast and accurate detection | [143] | |
| EKF and entropy | Voltage | Sensor faults Short circuit Connection faults | Online, comprehensive fault detection | [145] | |
| Signal-based | Sample Entropy and EMD | Voltage | Detecting and locating various faults High accuracy | [147] | |
| Gas and force sensor | Gas Force | Internal short circuit | Fast and simple | [148] | |
| Data-driven | SVM | Voltage | Voltage fault | High accuracy Severity estimation | [138] |
| GRNN | voltage | Voltage fault | High accuracy Estimating fault severity and location | [149] | |
| LSTN-RNN | voltage | Battery failure Thermal runaway | Highly precise Online fault detection Fast Trained based on real-world data | [151] | |
| RBF-NN | Voltage Current Temperature | Battery faults | 100% accuracy | [152] | |
| MC-SVM | Current Voltage Temperature Discharging Capacity | Over/under-voltage Overheating Low capacity | A small training data set High accuracy | [153] | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Khaneghah, M.Z.; Alzayed, M.; Chaoui, H. Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles. Machines 2023, 11, 713. https://doi.org/10.3390/machines11070713
AMA Style
Khaneghah MZ, Alzayed M, Chaoui H. Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles. Machines. 2023; 11(7):713. https://doi.org/10.3390/machines11070713
Chicago/Turabian StyleKhaneghah, Mohammad Zamani, Mohamad Alzayed, and Hicham Chaoui. 2023. "Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles" Machines 11, no. 7: 713. https://doi.org/10.3390/machines11070713
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.