
Rolling Bearing Weak Fault Feature Extraction under Variable Speed Conditions via Joint Sparsity and Low-Rankness in the Cyclic Order-Frequency Domain


Abstract
:1. Introduction
- The OFSC is calculated by converting the measurement of a rolling bearing with variable speed into the cyclic order-frequency domain. The joint sparsity and low-rankness of the fault feature in OFSC is firstly revealed in this paper, which can be utilized to extract weak fault features of rolling bearings under variable speed conditions;
- A joint sparsity and low-rankness constraint is imposed on the OFSC to model the fault feature. To optimize the proposed model, an algorithm named ADMM-SLRJEM is developed to extract the fault feature in OFSC.
2. The Signal of Faulty Rolling Bearing with Variable Speed: An Angle-Time Cyclostationary View
2.1. Problem Statement
2.2. The Angle-Time Cyclostationarity of the Faulty Bearing with Variable Speed
2.3. The Calculation of the Order-Frequency Spectral Correlation
3. The Proposed Rolling Bearing Fault Feature Extraction Method under Variable Speed Conditions
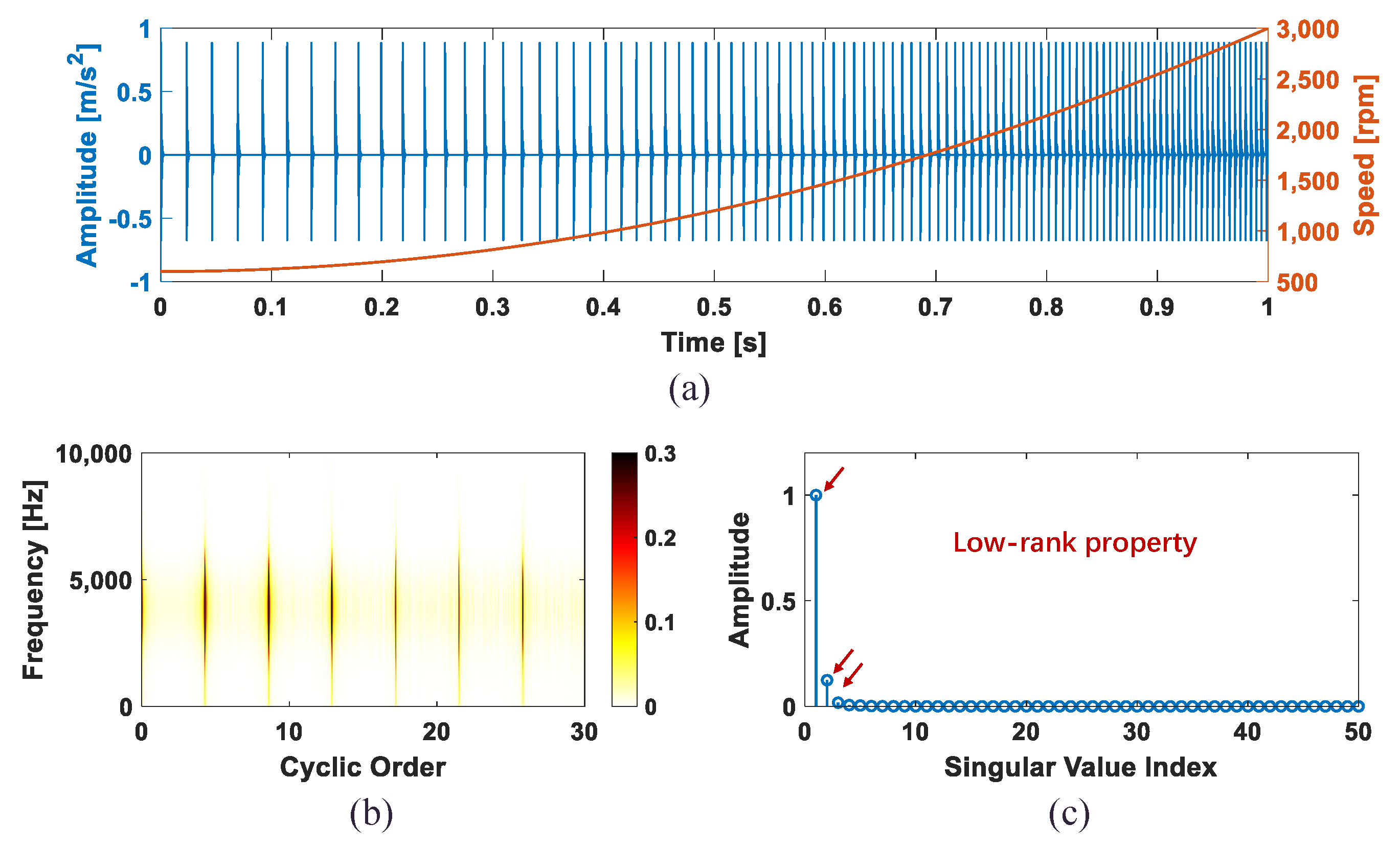
3.1. The Joint Sparsity and Low-Rankness of the Fault Feature in OFSC
3.2. The Optimization Algorithm Derivation
3.2.1. The Solution of Sub-Problem (12)
3.2.2. The Solution of Sub-Problem (13)
| Algorithm 1 ADMM-SLRJEM. |
|
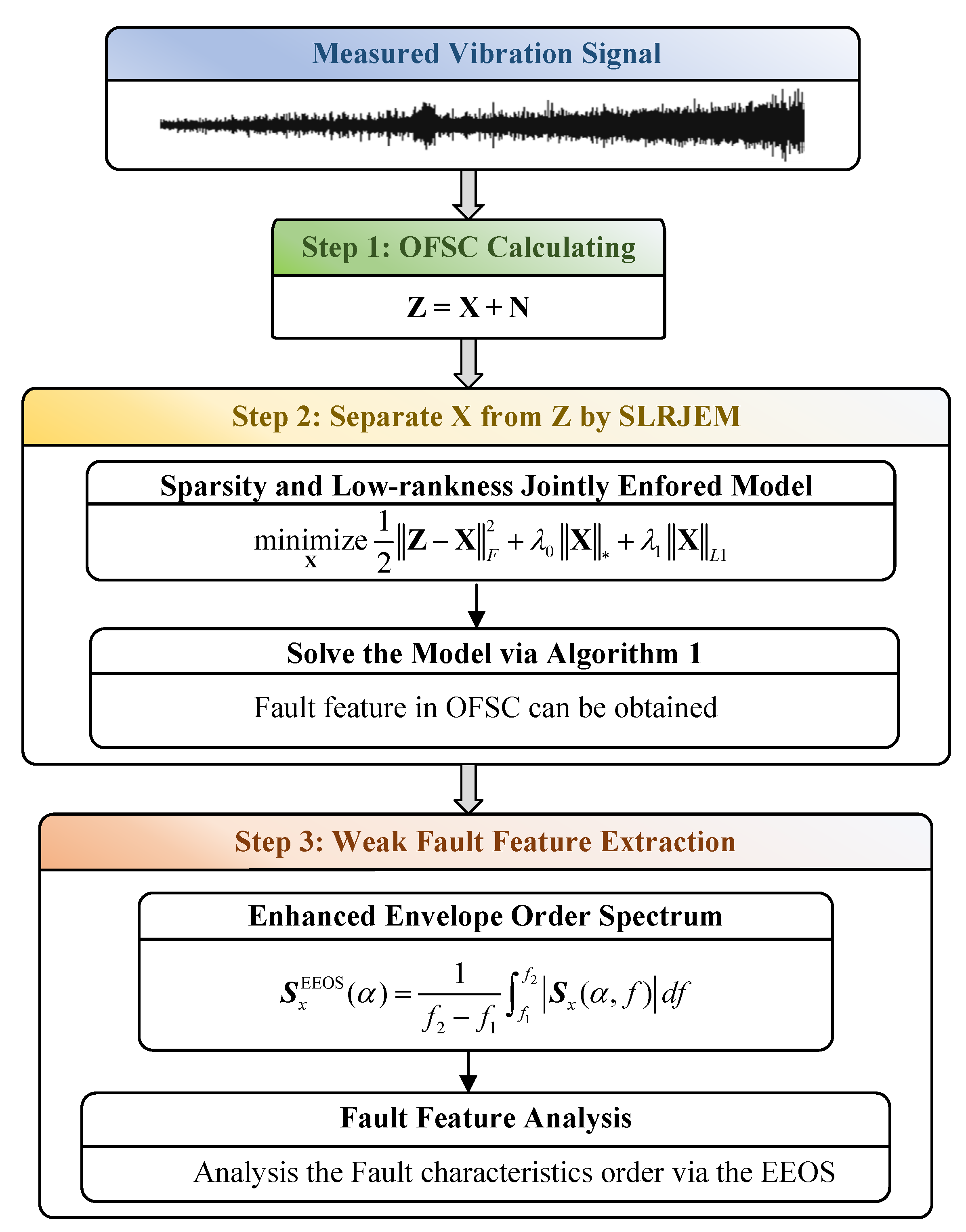
3.3. Process of the Proposed Extraction Method of Rolling Bearing Fault Feature
- Step 1: Resample the obtained vibration measurement into the angular domain and calculate the OFSC via Equation (4).
- Step 2: Separate the fault feature from the obtained OFSC via the proposed algorithm. The obtained OFSC is constrained as jointly sparse and low-rank, which is explained in Section 3.1. The derived algorithm in Section 3.2 named ADMM-SLRJEM is applied to separate the time-varying fault feature in the obtained OFSC.
- Step 3: Calculate the EEOS according to Equation (5) to further enhance the separated fault feature in OFSC. Then, the enhanced fault feature can be more obvious for fault diagnosis of rolling bearing with variable speed.
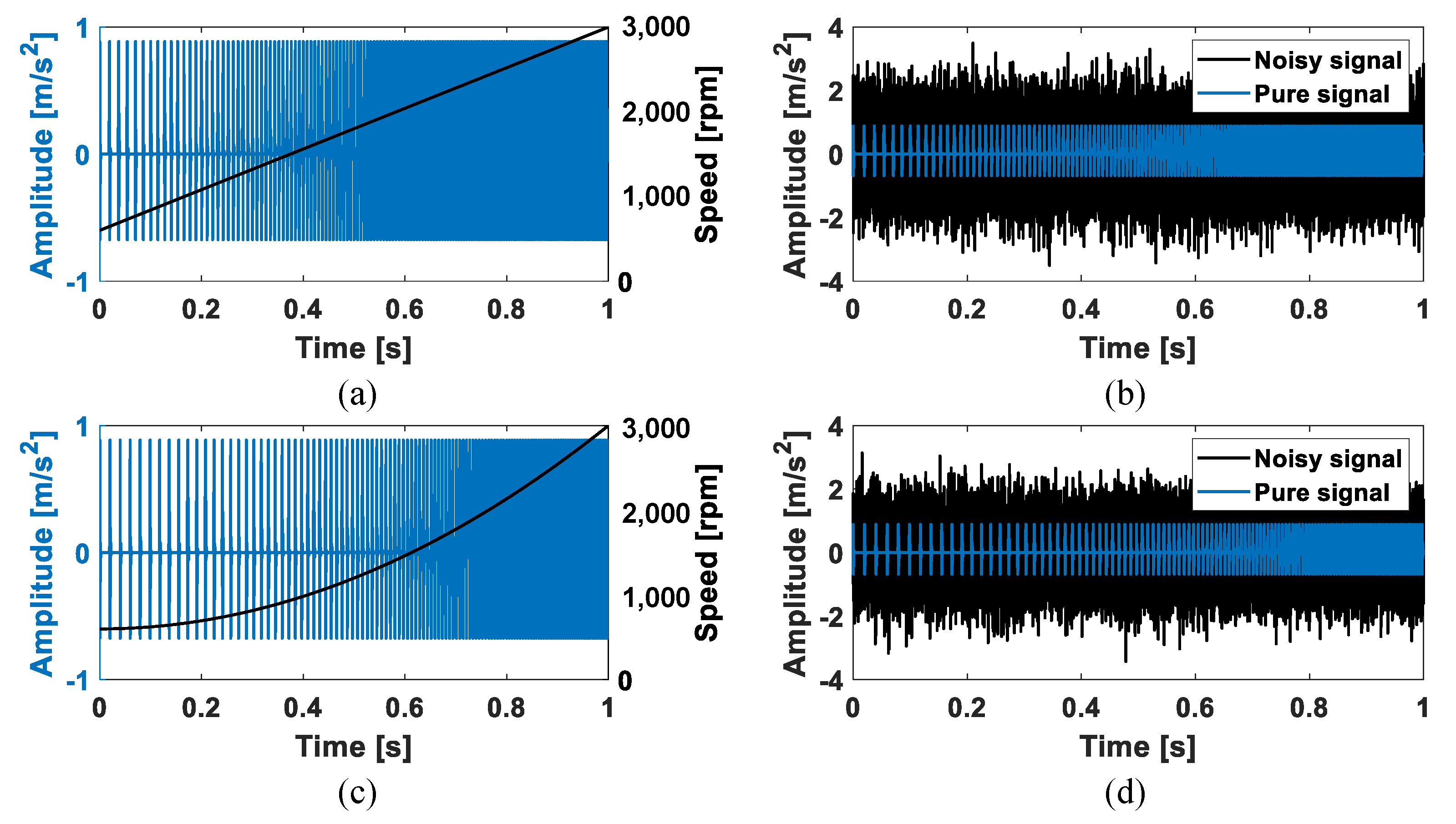
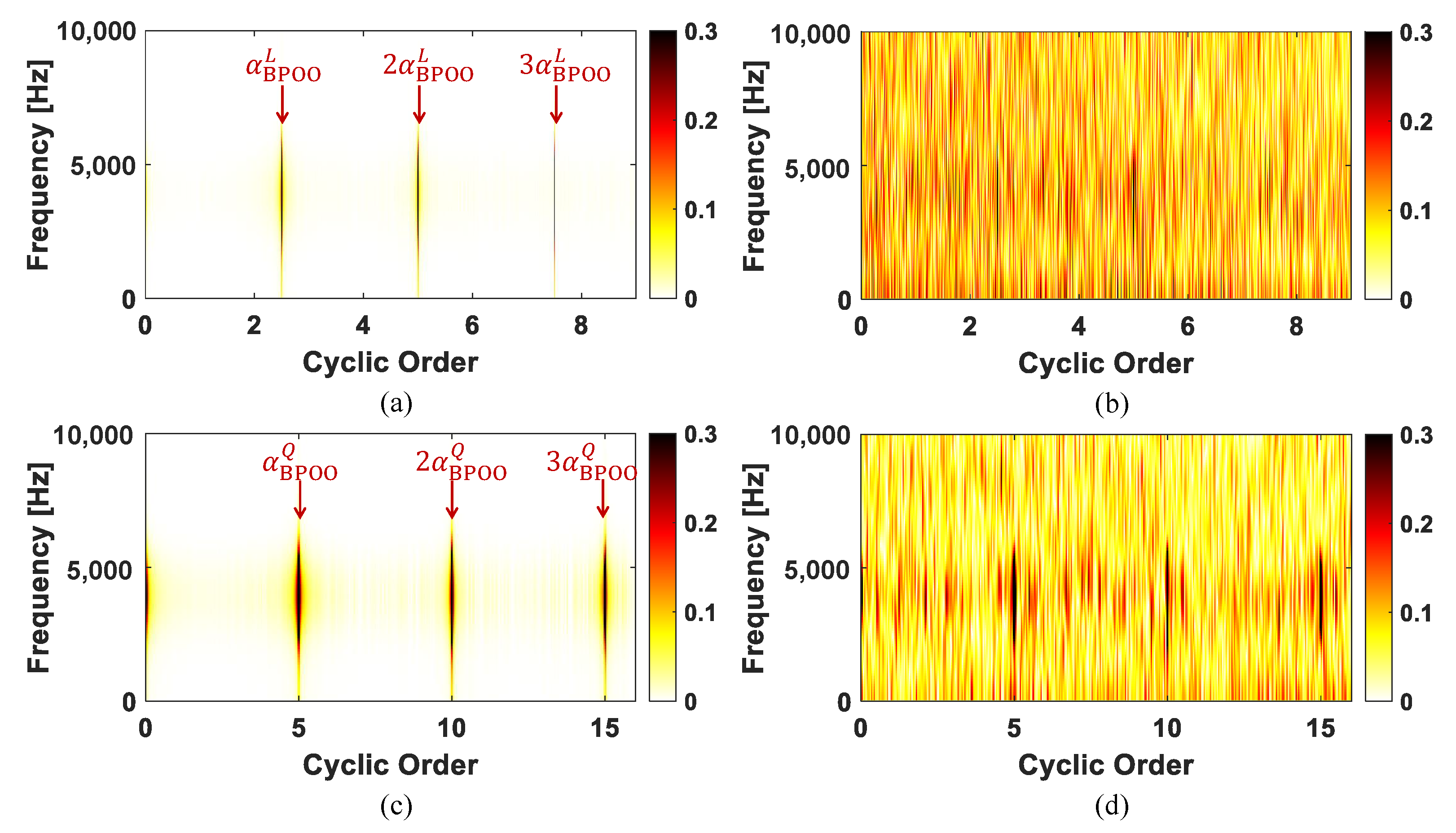
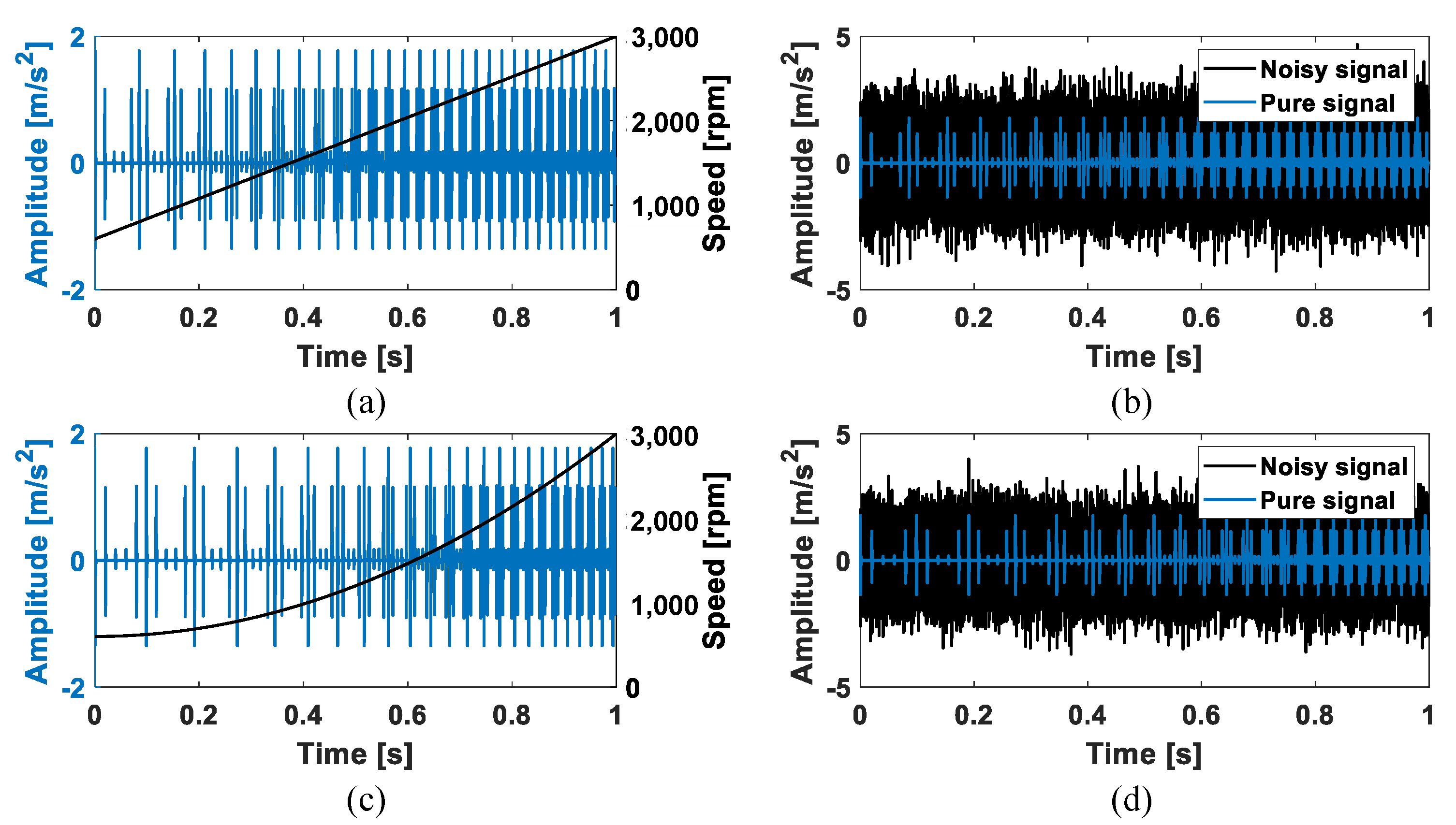
4. Simulation Study
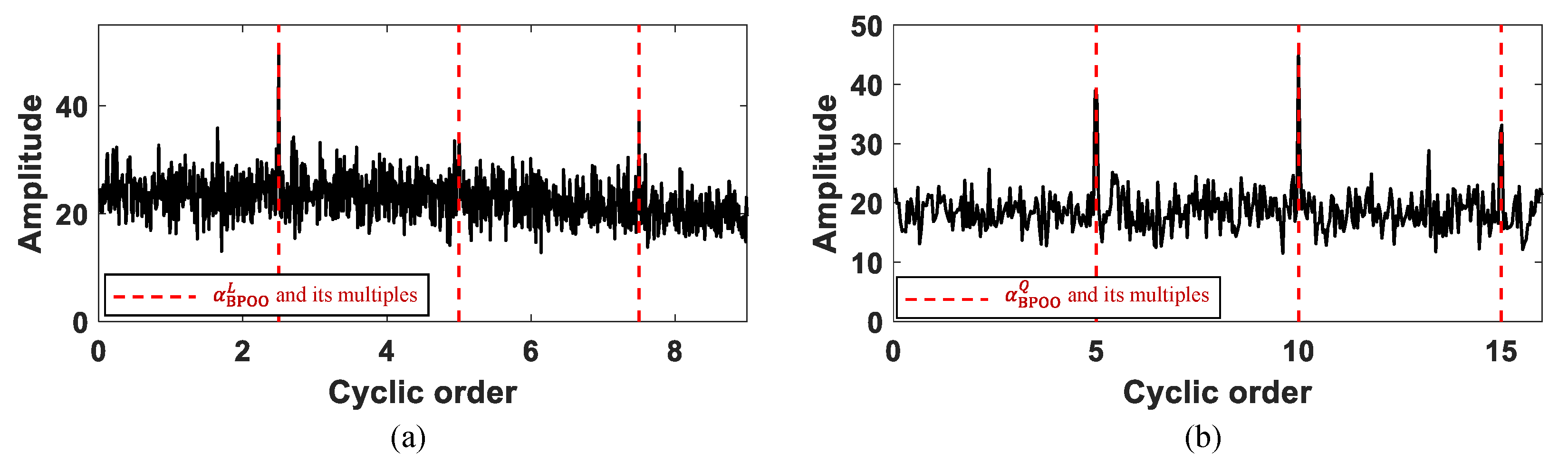
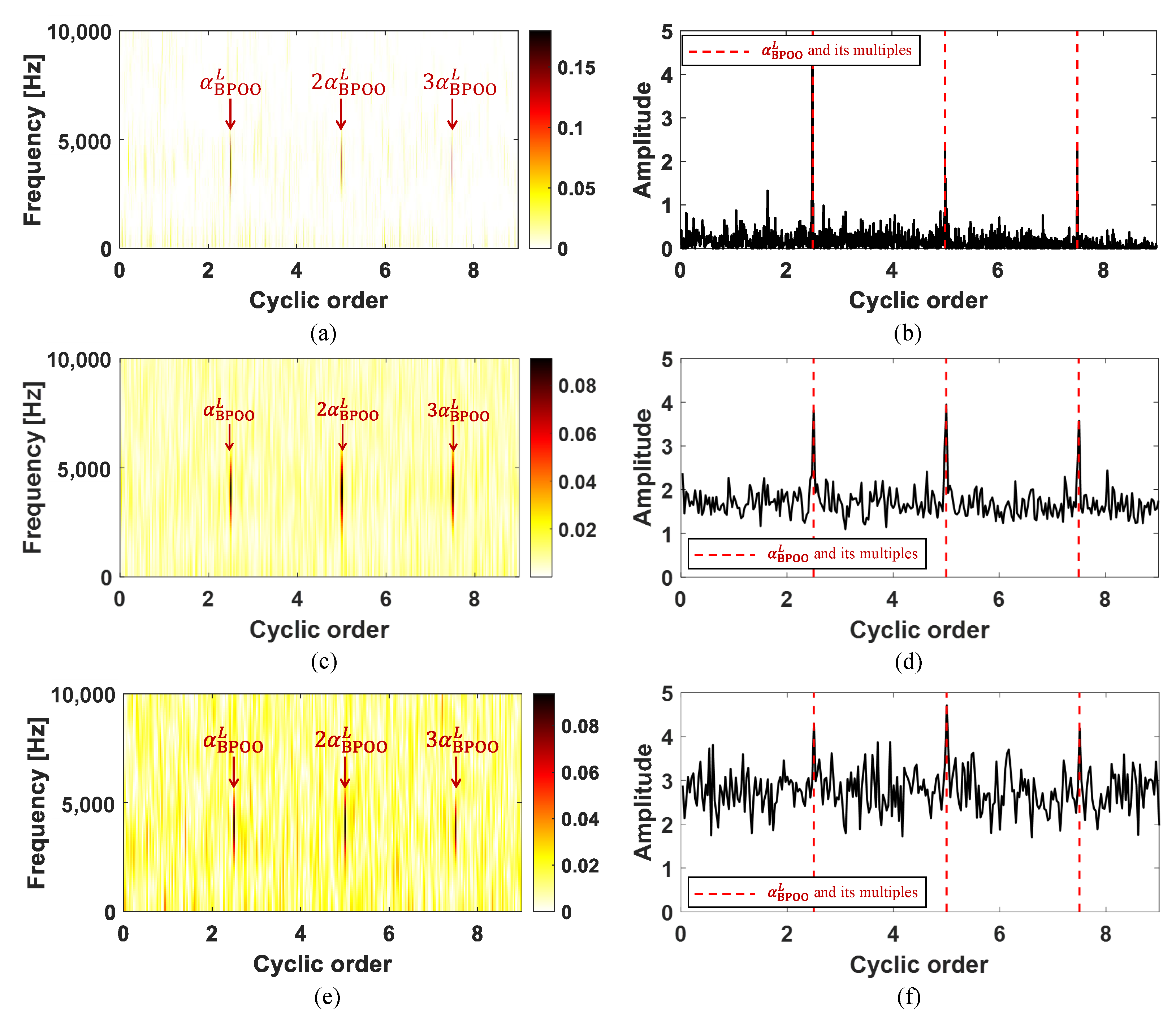
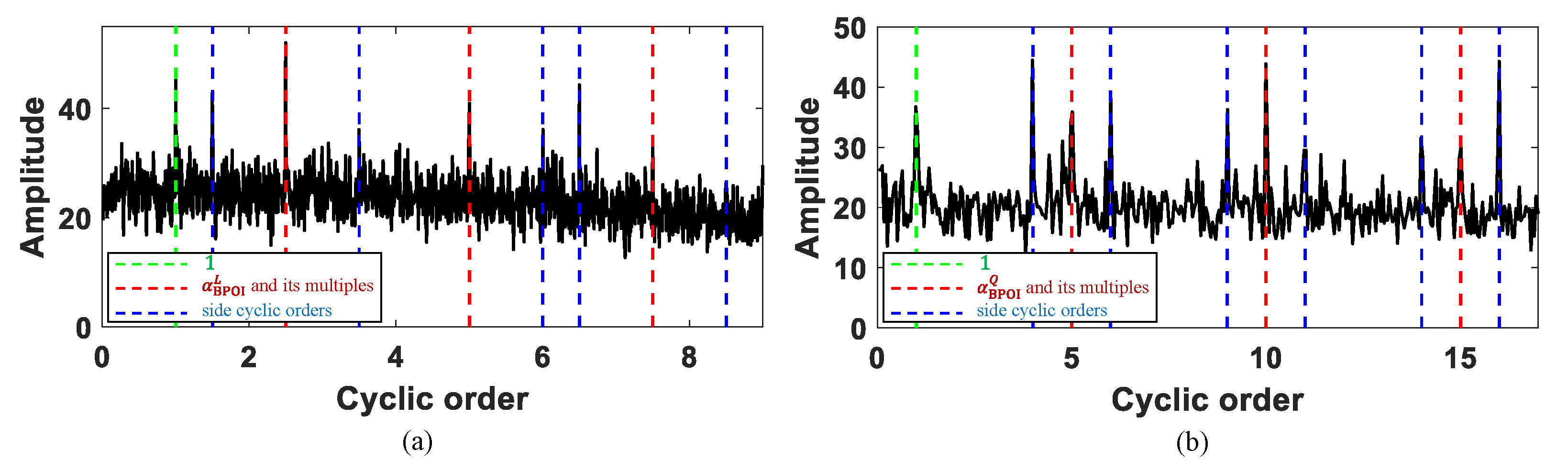
4.1. Case 1: Outer Race Fault
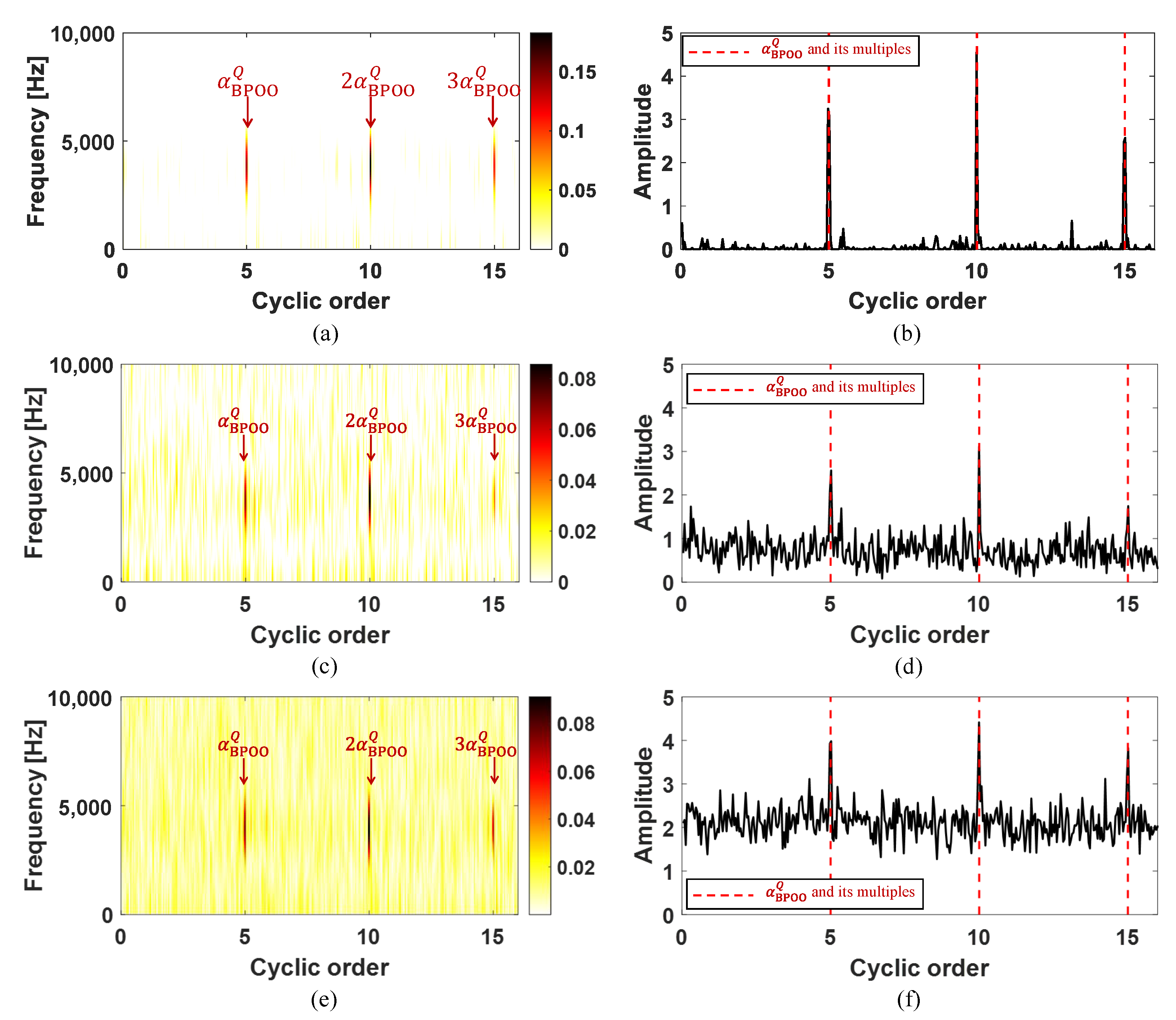
4.2. Case 2: Inner Race Fault
5. Experimental Validation
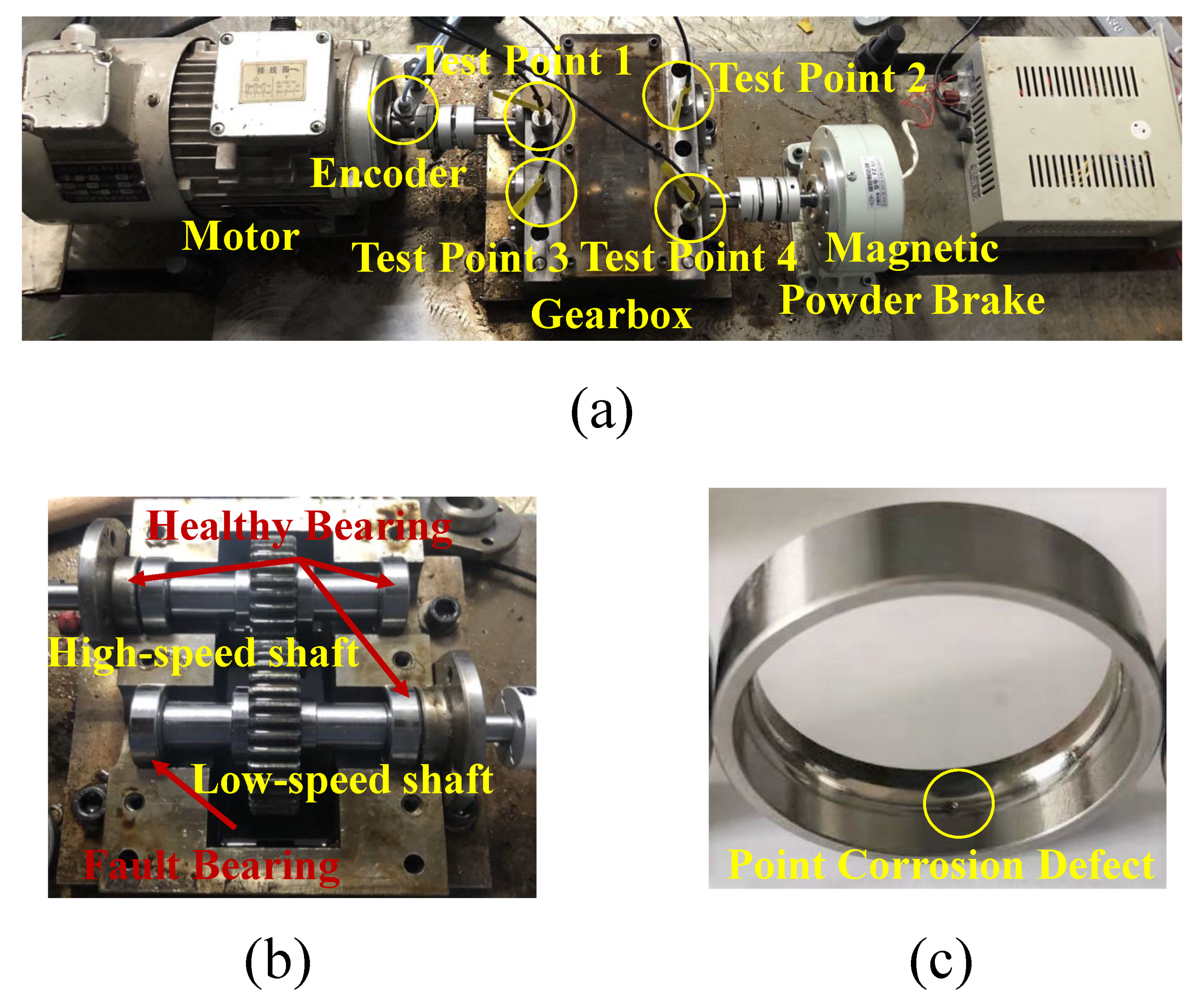
5.1. Experimental Layout
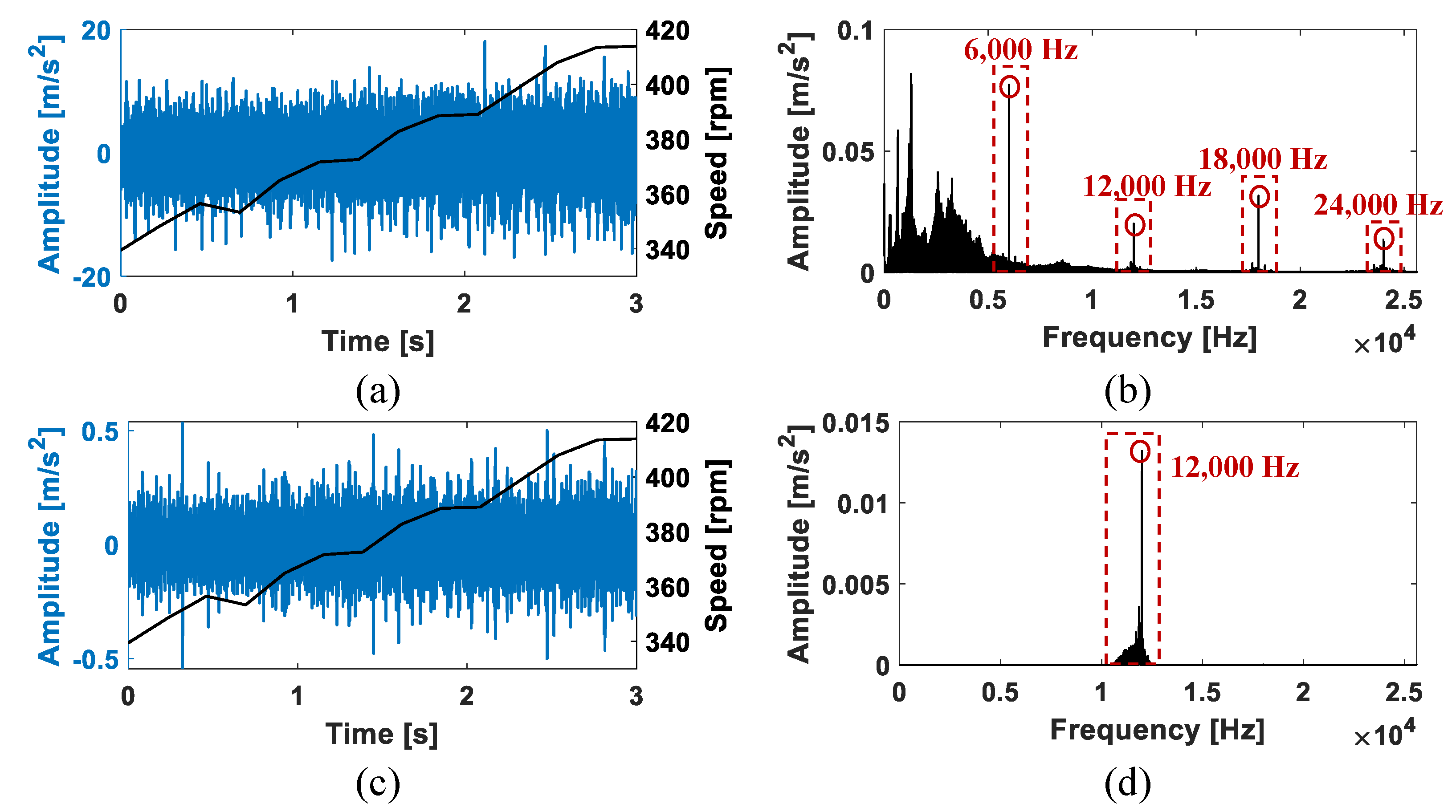
5.2. Data Preprocessing
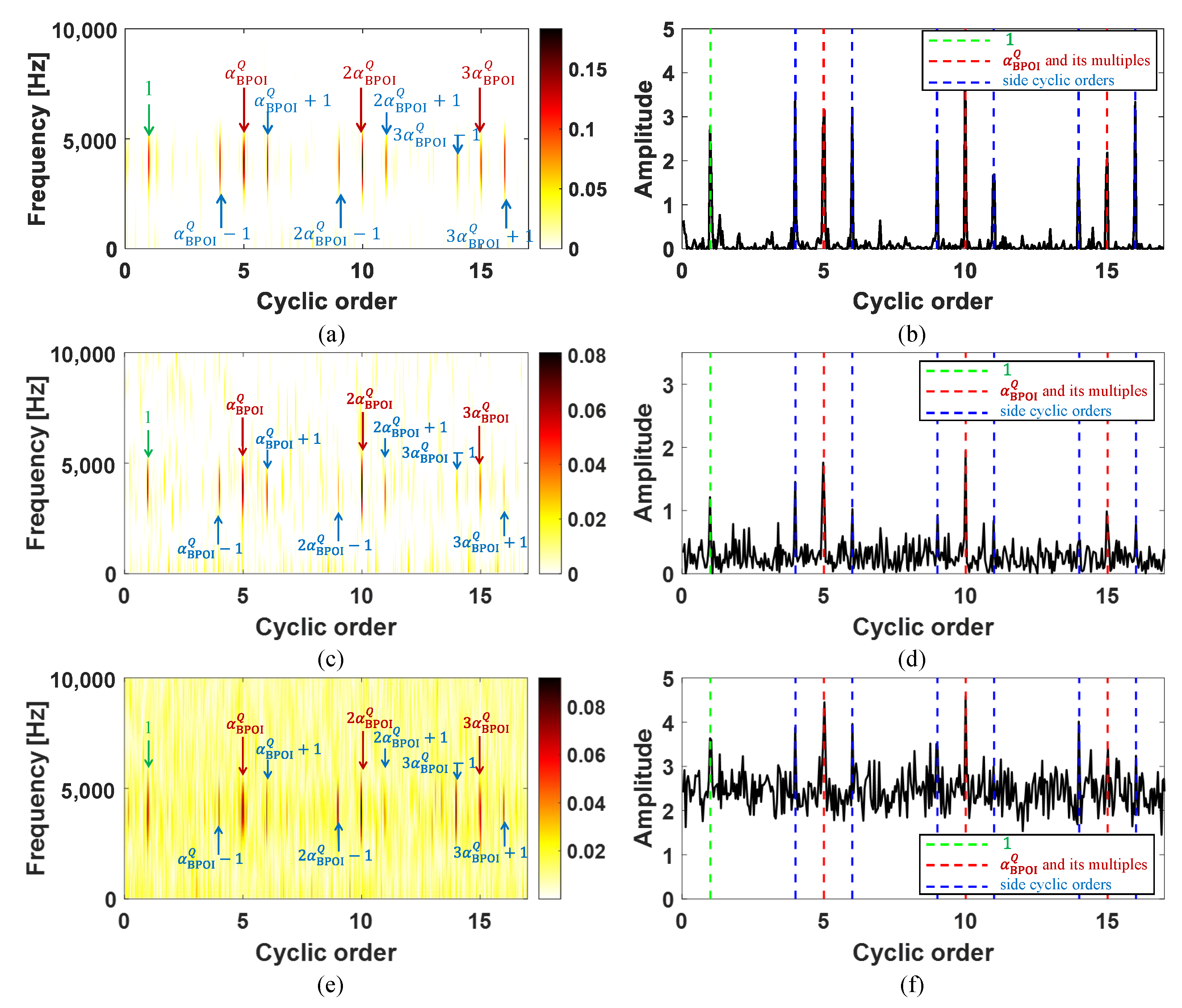
5.3. Extraction Results of the Outer Race Fault
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| OFSC | Order-frequency spectral correlation |
| LRJEM | Low-rankness jointly enforced model |
| ADMM | Alternating direction method of multipliers |
| STFT | Short-time Fourier transform |
| EES | Enhanced envelope spectrum |
| EEOS | Enhanced envelope order spectrum |
| FCF | Fault characteristic frequency |
| TFA | Time-frequency analysis |
| RPCA | Robust principal component analysis |
| SNR | Signal-to-noise ratio |
| CNS | Cyclic non-stationary |
| AT-CS | Angle-time cyclostationary |
| ATCF | Angle-time autocorrelation function |
| SC | Spectral correlation |
| SVD | singular value decomposition |
| SRF | Shaft rotating frequency |
Appendix A. The Detailed Process to Obtain Equation (15) from Equation (12)
References
- Yang, B.; Liu, R.; Chen, X. Fault diagnosis for a wind turbine generator bearing via sparse representation and shift-invariant K-SVD. IEEE Trans. Ind. Inf. 2017, 13, 1321–1331. [Google Scholar] [CrossRef]
- Jiang, X.; Cheng, X.; Shi, J.; Huang, W.; Shen, C.; Zhu, Z. A new l0-norm embedded MED method for roller element bearing fault diagnosis at early stage of damage. Measurement 2018, 127, 414–424. [Google Scholar] [CrossRef]
- Jin, Y.; Qin, C.; Huang, Y.; Liu, C. Actual bearing compound fault diagnosis based on active learning and decoupling attentional residual network. Measurement 2021, 173, 108500. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Xie, Z.; Zhu, W. An investigation on the lubrication characteristics of floating ring bearing with consideration of multi-coupling factors. Mech. Syst. Signal Process. 2022, 162, 108086. [Google Scholar] [CrossRef]
- Zmarzły, P. Multi-Dimensional Mathematical Wear Models of Vibration Generated by Rolling Ball Bearings Made of AISI 52100 Bearing Steel. Materials 2020, 13, 5440. [Google Scholar] [CrossRef]
- Tang, G.; Wang, X.; He, Y. Diagnosis of compound faults of rolling bearings through adaptive maximum correlated kurtosis deconvolution. J. Mech. Sci.Technol. 2016, 30, 43–54. [Google Scholar] [CrossRef]
- Arpaia, P.; Cesaro, U.; Chadli, M.; Coppier, H.; De Vito, L.; Esposito, A.; Gargiulo, F.; Pezzetti, M. Fault detection on fluid machinery using Hidden Markov Models. Measurement 2020, 151, 107–126. [Google Scholar] [CrossRef]
- Zhu, H.; He, Z.; Wei, J.; Wang, J.; Zhou, H. Bearing fault feature extraction and fault diagnosis method based on feature fusion. Sensors 2021, 21, 2524. [Google Scholar] [CrossRef]
- Qiao, W.; Lu, D. A Survey on Wind Turbine Condition Monitoring and Fault Diagnosis—Part II: Signals and Signal Processing Methods. IEEE Trans. Ind. Electron. 2015, 62, 6546–6557. [Google Scholar] [CrossRef]
- Borghesani, P.; Ricci, R.; Chatterton, S.; Pennacchi, P. A new procedure for using envelope analysis for rolling element bearing diagnostics in variable operating conditions. Mech. Syst. Signal Process. 2013, 38, 23–35. [Google Scholar] [CrossRef]
- Ding, C.; Zhao, M.; Lin, J.; Jiao, J. Multi-objective iterative optimization algorithm based optimal wavelet filter selection for multi-fault diagnosis of rolling element bearings. ISA Trans. 2019, 88, 199–215. [Google Scholar] [CrossRef] [PubMed]
- Antoni, J.; Randall, R.B. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech.Syst. Signal Process. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterizing non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Jiang, X.; Shen, C.; Shi, J.; Zhu, Z. Initial center frequency-guided VMD for fault diagnosis of rotating machines. J. Sound Vib. 2018, 435, 36–57. [Google Scholar] [CrossRef]
- Li, H.; Liu, T.; Wu, X.; Li, S. Research on test bench bearing fault diagnosis of improved EEMD based on improved adaptive resonanceance technology. Measurement 2019, 185, 109986. [Google Scholar] [CrossRef]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. Application of EEMD and improved frequency band entropy in bearing fault feature extraction. ISA Trans. 2019, 88, 170–185. [Google Scholar] [CrossRef]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. Research on bearing fault feature extraction based on singular value decomposition and optimized frequency band entropy. Mech. Syst. Signal Process. 2019, 118, 477–502. [Google Scholar] [CrossRef]
- Hou, F.; Selesnick, I.W.; Chen, J.; Dong, G. Fault diagnosis for rolling bearings under unknown time-varying speed conditions with sparse representation. J. Sound Vib. 2021, 494, 115854. [Google Scholar] [CrossRef]
- Wang, R.; Fang, H.; Yu, L.; Chen, J. Sparse and low-rank decomposition of the time–frequency representation for bearing fault diagnosis under variable speed conditions. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Yang, H.; Mathew, J.; Ma, L. Fault diagnosis of rolling element bearings using basis pursuit. Mech. Syst. Signal Process. 2005, 19, 341–356. [Google Scholar] [CrossRef]
- Huang, H.; Baddour, N.; Liang, M. Bearing fault diagnosis under unknown time-varying rotational speed conditions via multiple time-frequency curve extraction. J. Sound Vib. 2018, 414, 43–60. [Google Scholar] [CrossRef]
- Yu, L.; Dai, W.; Huang, S.; Jiang, W. Sparse Time–Frequency Representation for the Transient Signal Based on Low-Rank and Sparse Decomposition. J. Acoust. 2019, 1, e190003. [Google Scholar]
- Wright, J.; Ganesh, A.; Rao, S.; Ma, Y. Robust principal component analysis: Exact recovery of corrupted low-rank matrices via convex optimization. arXiv 2009, arXiv:0905.0233v2. [Google Scholar]
- Du, Z.; Chen, X.; Zhang, H.; Yang, B.; Zhai, Z.; Yan, R. Weighted low-rank sparse model via nuclear norm minimization for bearing fault detection. J. Sound Vib. 2017, 400, 270–287. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, X.; Zhang, X. A clustering low-rank approach for aero-enging bearing fault detection. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference, Auckland, New Zealand, 20–23 May 2019; pp. 1–6. [Google Scholar]
- Wang, B.; Liao, Y.; Ding, C.; Zhang, X. Periodical sparse low-rank matrix estimation algorithm for fault detection of rolling bearings. ISA Trans. 2020, 101, 366–378. [Google Scholar] [CrossRef]
- Wang, B.; Liao, Y.; Duan, R.; Zhang, X. Sparse Low-Rank Based Signal Analysis Method for Bearing Fault Feature Extraction. Appl. Sci. 2021, 10, 2358. [Google Scholar] [CrossRef] [Green Version]
- Parekh, A.; Selesnick, I.W. Improved sparse low-rank matrix estimation. Signal Process. 2017, 139, 62–69. [Google Scholar] [CrossRef] [Green Version]
- Feng, Z.; Liang, M.; Chu, F. Recent advances in time-frequency analysis methods for machinery fault diagnosis: A review with application examples. Mech. Syst. Signal Process. 2013, 38, 165–205. [Google Scholar] [CrossRef]
- Borghesani, P.; Pennacchi, P.; Randall, R.B. Order tracking for discrete-random separation in variable speed conditions. Mech. Syst. Signal Process. 2012, 30, 1–22. [Google Scholar] [CrossRef]
- Hou, B.; Wang, Y.; Tang, B.; Qin, Y.; Chen, Y. A tacholess order tracking method for wind turbine planetary gearbox fault detection. Meas. J. Int. Meas. Confed. 2019, 138, 266–277. [Google Scholar] [CrossRef]
- Abboud, D.; Antoni, J.; Eltabach, M.; Sieg, Z.S. Anglentime cyclostationarity for the analysis of rolling element bearing vibrations. Measurement 2015, 75, 29–39. [Google Scholar] [CrossRef]
- Abboud, D.; Antoni, J.; Leclere, Q. Spectral matrix completion by Cyclic Projection and application to sound source reconstruction from non-synchronous measurements. J. Sound Vib. 2016, 372, 31–49. [Google Scholar]
- Abboud, D.; Antoni, J. Order-frequency analysis of machine signals. Mech. Syst. Signal Process. 2017, 87, 229–258. [Google Scholar] [CrossRef]
- Jiao, Y.; Jin, Q.; Lu, X.; Wang, W. Alternating direction method of multipliers for linear inverse problems. SIAM J. Numer. Anal. 2016, 54, 2114–2137. [Google Scholar] [CrossRef]
- Yu, H.; Neely, M.J. A Simple Parallel Algorithm with an O(1/t) Convergence Rate for General Convex Programs. arXiv 2015, arXiv:1512.08370v3. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constraint | Time |
|---|---|
| Joint sparsity and low-rankness | 6.04 s |
| Single sparsity | 6.23 s |
| Single low-rankness | 6.11 s |
| Type | Rolling Balls Number | Rolling Element Diameter | Pitch Diameter | |
|---|---|---|---|---|
| 6203 | 8 | 6.747 mm | 28.5 mm | 3.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Zhang, C.; Yu, L.; Fang, H.; Hu, X. Rolling Bearing Weak Fault Feature Extraction under Variable Speed Conditions via Joint Sparsity and Low-Rankness in the Cyclic Order-Frequency Domain. Appl. Sci. 2022, 12, 2449. https://doi.org/10.3390/app12052449
Wang R, Zhang C, Yu L, Fang H, Hu X. Rolling Bearing Weak Fault Feature Extraction under Variable Speed Conditions via Joint Sparsity and Low-Rankness in the Cyclic Order-Frequency Domain. Applied Sciences. 2022; 12(5):2449. https://doi.org/10.3390/app12052449
Chicago/Turabian StyleWang, Ran, Chenyu Zhang, Liang Yu, Haitao Fang, and Xiong Hu. 2022. "Rolling Bearing Weak Fault Feature Extraction under Variable Speed Conditions via Joint Sparsity and Low-Rankness in the Cyclic Order-Frequency Domain" Applied Sciences 12, no. 5: 2449. https://doi.org/10.3390/app12052449