
Enhancing Robustness of Surface Electromyography Pattern Recognition at Different Arm Positions for Transhumeral Amputees Using Deep Adversarial Inception Domain Adaptation
Abstract
:1. Introduction
- Leveraging the power of the Inception module, we incorporated parallel convolutional kernels of different sizes to enhance the feature-capturing capability of the model. This ensures the model’s ability to discern nuanced details crucial for upper arm motion recognition. Meanwhile, our algorithmic framework facilitates the seamless execution of two training phases without modifying any structures. These two training phases can eliminate heterogeneous features to ensure good motion recognition performance at the new arm position.
- To validate the effectiveness of our proposed model, we conducted experiments involving both able-bodied subjects and transhumeral amputees. This result showcases the model’s motion recognition accuracy and stability at different arm elevation positions, providing prospects for the advancement of myoelectric interfaces.
2. Methods
2.1. Data Acquisition
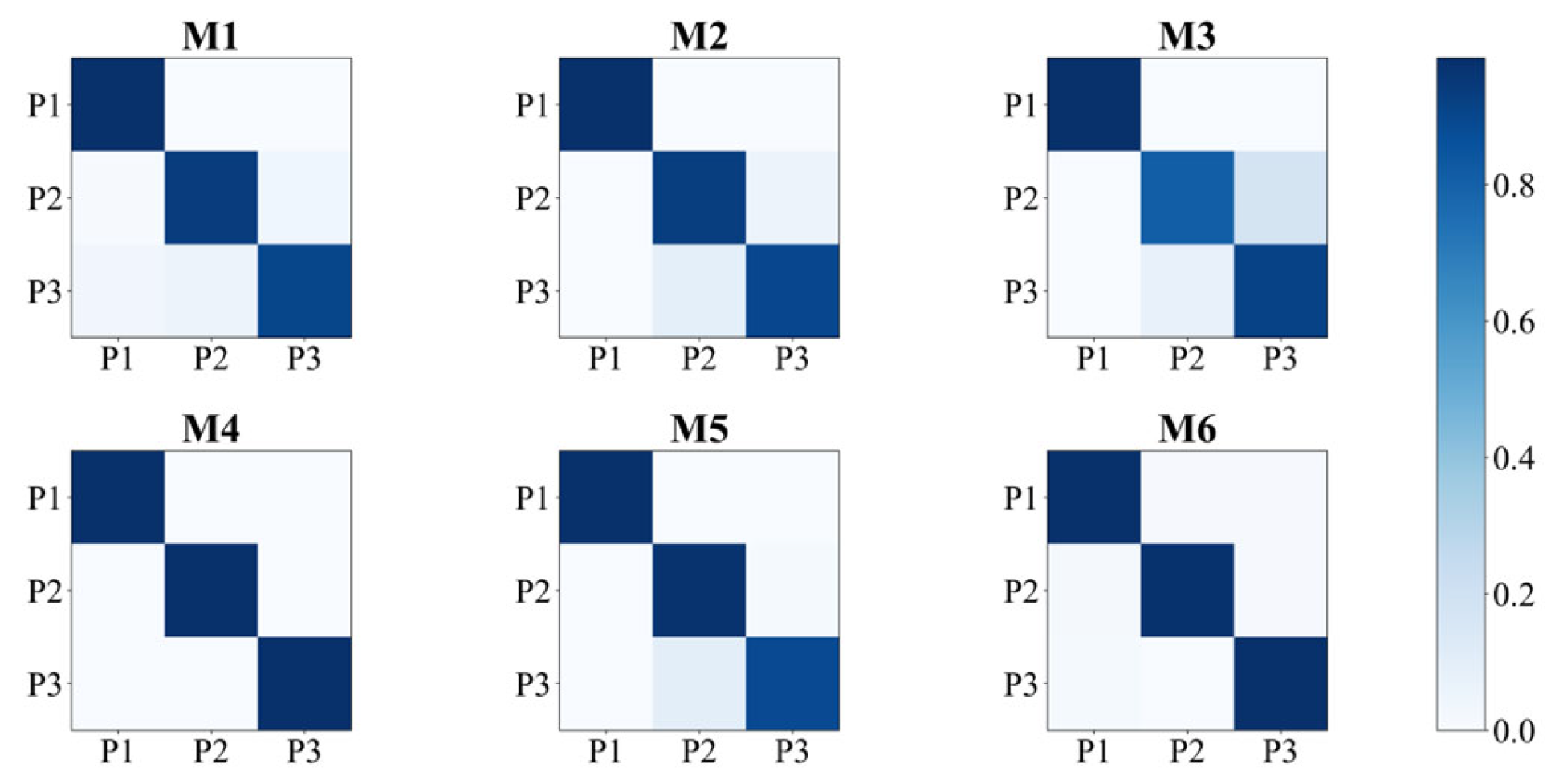
- P1: upper arm parallel to the horizontal plane;
- P2: elevated upper arm to 45° from the horizontal plane;
- P3: elevated upper arm to 90° from the horizontal plane.
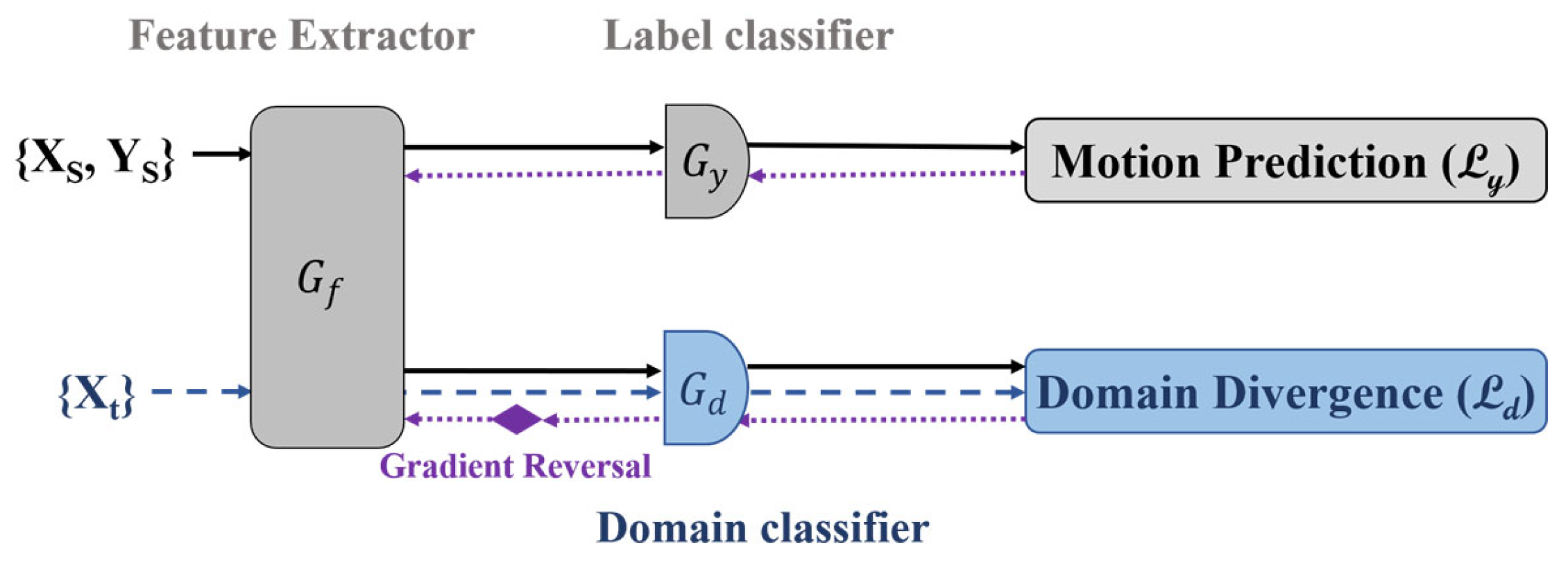
2.2. DAIDA Framework
2.2.1. Preprocessing
2.2.2. The CNN Model
2.2.3. DAIDA Framework
| Algorithm 1 Proposed DAIDA Algorithm |
| Input: (1) Training data: Labeled source and unlabeled target . (2) learning rate η, and iteration ; (3) Initialized parameters: of feature extractors, of label classifier, of domain classifier, weighting hyper-parameter . Output: Optimized parameters , and . for T = 1,2, …, do for N = 1,2, …, do Select mini batch: , from , Calculate weights: , and Calculate the losses: Calculate the final loss: Update the parameters: End for End for |
2.2.4. Training Scheme
- Without domain adaptation, training is solely based on labeled source domain data; i.e., the training data are labeled motion data from all positions and the test data are labeled data from one single position (No. 1).
- Domain adaptation is performed on source domain data; i.e., the test data come from the source domain and do not overlap with the retraining data (No. 2).
- Domain adaptation is performed on data from the target domain; i.e., the test data are from the target domain and from the same domain as the retraining data (No. 3).
- The ability to generalize the model after domain adaptation is determined; i.e., test data are not derived from the source nor the target domain (No. 4).
- The performance of the domain adaptation effect on the total dataset is determined; i.e., the source domain data from the sum of all arm position data, the target domain from data of one single arm position and the test data from a single arm position that are identical to (No. 5) or distinct from (No. 6) the target data.
2.3. Statistical Analysis
3. Results
3.1. CNN Model Recognition Performance
3.2. Position Recalibration
3.3. The Recognition Performance of Transhumeral Subjects
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kuiken, T.A.; Li, G.; Lock, B.A.; Lipschutz, R.D.; Miller, L.A.; Stubblefield, K.A.; Englehart, K.B. Targeted Muscle Reinnervation for Real-Time Myoelectric Control of Multifunction Artificial Arms. JAMA 2009, 301, 619–628. [Google Scholar] [CrossRef]
- Garbarini, F.; Bisio, A.; Biggio, M.; Pia, L.; Bove, M. Motor Sequence Learning and Intermanual Transfer with a Phantom Limb. Cortex 2018, 101, 181–191. [Google Scholar] [CrossRef]
- Jarrasse, N.; Nicol, C.; Touillet, A.; Richer, F.; Martinet, N.; Paysant, J.; de Graaf, J.B. Classification of Phantom Finger, Hand, Wrist, and Elbow Voluntary Gestures in Transhumeral Amputees With sEMG. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 68–77. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, G.; Wang, H.; Huang, P.; Yu, W. Long-Term Stability Performance Evaluation of Pattern Recognition with sEMG. In Proceedings of the 2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Xi’an, China, 15–17 October 2021; pp. 775–779. [Google Scholar]
- Tsinganos, P.; Cornelis, B.; Cornelis, J.; Jansen, B.; Skodras, A. Hilbert sEMG Data Scanning for Hand Gesture Recognition Based on Deep Learning. Neural Comput. Appl. 2021, 33, 2645–2666. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, J.; Xie, H. Surface-Electromyography-Based Gesture Recognition Using a Multistream Fusion Strategy. IEEE Access 2021, 9, 50583–50592. [Google Scholar] [CrossRef]
- Peng, X.; Zhou, X.; Zhu, H.; Ke, Z.; Pan, C. MSFF-Net: Multi-Stream Feature Fusion Network for Surface Electromyography Gesture Recognition. PLoS ONE 2022, 17, e0276436. [Google Scholar] [CrossRef]
- Yang, Z.; Jiang, D.; Sun, Y.; Tao, B.; Tong, X.; Jiang, G.; Xu, M.; Yun, J.; Liu, Y.; Chen, B.; et al. Dynamic Gesture Recognition Using Surface EMG Signals Based on Multi-Stream Residual Network. Front. Bioeng. Biotechnol. 2021, 9, 779353. [Google Scholar] [CrossRef] [PubMed]
- Tigrini, A.; Al-Timemy, A.H.; Verdini, F.; Fioretti, S.; Morettini, M.; Burattini, L.; Mengarelli, A. Decoding Transient sEMG Data for Intent Motion Recognition in Transhumeral Amputees. Biomed. Signal Process. Control 2023, 85, 104936. [Google Scholar] [CrossRef]
- Shi, P.; Zhang, X.; Li, W.; Yu, H. Improving the Robustness and Adaptability of sEMG-Based Pattern Recognition Using Deep Domain Adaptation. IEEE J. Biomed. Health Inform. 2022, 26, 5450–5460. [Google Scholar] [CrossRef]
- Pulliam, C.L.; Lambrecht, J.M.; Kirsch, R.F. EMG-Based Neural Network Control of Transhumeral Prostheses. J. Rehabil. Res. Dev. 2011, 48, 739–754. [Google Scholar] [CrossRef]
- Biddiss, E.; Beaton, D.; Chau, T. Consumer Design Priorities for Upper Limb Prosthetics. Disabil. Rehabil. Assist. Technol. 2007, 2, 346–357. [Google Scholar] [CrossRef] [PubMed]
- Jarrassé, N.; de Montalivet, E.; Richer, F.; Nicol, C.; Touillet, A.; Martinet, N.; Paysant, J.; de Graaf, J.B. Phantom-Mobility-Based Prosthesis Control in Transhumeral Amputees Without Surgical Reinnervation: A Preliminary Study. Front. Bioeng. Biotechnol. 2018, 6, 164. [Google Scholar] [CrossRef] [PubMed]
- Spatial Correlation of High Density EMG Signals Provides Features Robust to Electrode Number and Shift in Pattern Recognition for Myocontrol|IEEE Journals & Magazine|IEEE Xplore. Available online: https://ieeexplore.ieee.org/document/6949119 (accessed on 18 March 2024).
- Merletti, R.; Botter, A.; Troiano, A.; Merlo, E.; Minetto, M.A. Technology and Instrumentation for Detection and Conditioning of the Surface Electromyographic Signal: State of the Art. Clin. Biomech. 2009, 24, 122–134. [Google Scholar] [CrossRef]
- A Hybrid Non-Invasive Method for the Classification of Amputee’s Hand and Wrist Movements|SpringerLink. Available online: https://link.springer.com/chapter/10.1007/978-981-10-4505-9_34 (accessed on 21 October 2023).
- Barron, O.; Raison, M.; Gaudet, G.; Achiche, S. Recurrent Neural Network for Electromyographic Gesture Recognition in Transhumeral Amputees. Appl. Soft Comput. 2020, 96, 106616. [Google Scholar] [CrossRef]
- Khushaba, R.N.; Takruri, M.; Miro, J.V.; Kodagoda, S. Towards Limb Position Invariant Myoelectric Pattern Recognition Using Time-Dependent Spectral Features. Neural Netw. 2014, 55, 42–58. [Google Scholar] [CrossRef]
- Geng, Y.; Zhou, P.; Li, G. Toward Attenuating the Impact of Arm Positions on Electromyography Pattern-Recognition Based Motion Classification in Transradial Amputees. J. Neuroeng. Rehabil. 2012, 9, 74. [Google Scholar] [CrossRef] [PubMed]
- Scheme, E.; Fougner, A.; Stavdahl, Ø.; Chan, A.D.C.; Englehart, K. Examining the Adverse Effects of Limb Position on Pattern Recognition Based Myoelectric Control. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 6337–6340. [Google Scholar]
- Fougner, A.; Scheme, E.; Chan, A.D.C.; Englehart, K.; Stavdahl, Ø. Resolving the Limb Position Effect in Myoelectric Pattern Recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 644–651. [Google Scholar] [CrossRef] [PubMed]
- Khushaba, R.N.; Shi, L.; Kodagoda, S. Time-Dependent Spectral Features for Limb Position Invariant Myoelectric Pattern Recognition. In Proceedings of the 2012 International Symposium on Communications and Information Technologies (ISCIT), Gold Coast, Australia, 2–5 October 2012; pp. 1015–1020. [Google Scholar]
- Jarrah, Y.A.; Asogbon, M.G.; Samuel, O.W.; Nsugbe, E.; Chen, S.; Li, G. Performance Evaluation of HD-sEMG Electrode Configurations on Myoelectric Based Pattern Recognition System: High-Level Amputees. In Proceedings of the 2022 IEEE International Workshop on Metrology for Industry 4.0 & IoT (MetroInd4.0&IoT), Trento, Italy, 7–9 June 2022; pp. 75–80. [Google Scholar]
- Ogiri, Y.; Yamanoi, Y.; Nishino, W.; Kato, R.; Takagi, T.; Yokoi, H. Development of an Upper-Limb Neuroprosthesis to Voluntarily Control Elbow and Hand. Adv. Robot. 2018, 32, 879–886. [Google Scholar] [CrossRef]
- A Subject-Transfer Framework Based on Single-Trial EMG Analysis Using Convolutional Neural Networks|Semantic Scholar. Available online: https://www.semanticscholar.org/paper/A-Subject-Transfer-Framework-Based-on-Single-Trial-Kim-Guan/f9f18166304171f862138362c7ed7fd714472a36 (accessed on 16 March 2024).
- Li, W.; Shi, P.; Yu, H. Gesture Recognition Using Surface Electromyography and Deep Learning for Prostheses Hand: State-of-the-Art, Challenges, and Future. Front. Neurosci. 2021, 15, 621885. [Google Scholar] [CrossRef]
- Li, S.; Zhang, Y.; Tang, Y.; Li, W.; Sun, W.; Yu, H. Real-Time sEMG Pattern Recognition of Multiple-Mode Movements for Artificial Limbs Based on CNN-RNN Algorithm. Electronics 2023, 12, 2444. [Google Scholar] [CrossRef]
- Asghari Oskoei, M.; Hu, H. Myoelectric Control Systems—A Survey. Biomed. Signal Process. Control 2007, 2, 275–294. [Google Scholar] [CrossRef]
- Qi, S.; Wu, X.; Chen, W.-H.; Liu, J.; Zhang, J.; Wang, J. sEMG-Based Recognition of Composite Motion with Convolutional Neural Network. Sens. Actuators A Phys. 2020, 311, 112046. [Google Scholar] [CrossRef]
- Smith, L.H.; Hargrove, L.J.; Lock, B.A.; Kuiken, T.A. Determining the Optimal Window Length for Pattern Recognition-Based Myoelectric Control: Balancing the Competing Effects of Classification Error and Controller Delay. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 186–192. [Google Scholar] [CrossRef] [PubMed]
- Phantom Movements from Physiologically Inappropriate Muscles: A Case Study with a High Transhumeral Amputee|IEEE Conference Publication|IEEE Xplore. Available online: https://ieeexplore.ieee.org/document/7319144 (accessed on 18 October 2023).
- Gaudet, G.; Raison, M.; Achiche, S. Classification of Upper Limb Phantom Movements in Transhumeral Amputees Using Electromyographic and Kinematic Features. Eng. Appl. Artif. Intell. 2018, 68, 153–164. [Google Scholar] [CrossRef]
- Asogbon, M.G.; Samuel, O.W.; Ejay, E.; Jarrah, Y.A.; Chen, S.; Li, G. HD-sEMG Signal Denoising Method for Improved Classification Performance in Transhumeral Amputees Prosthesis Control. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Online, 1–5 November 2021; pp. 857–861. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, D.; Wang, Y.; Feng, J.; Xu, W. Two Ways to Improve Myoelectric Control for a Transhumeral Amputee after Targeted Muscle Reinnervation: A Case Study. J. Neuroeng. Rehabil. 2018, 15, 37. [Google Scholar] [CrossRef]
- Position-Independent Decoding of Movement Intention for Proportional Myoelectric Interfaces|IEEE Journals & Magazine|IEEE Xplore. Available online: https://ieeexplore.ieee.org/document/7275160 (accessed on 8 October 2023).
- Mukhopadhyay, A.K.; Samui, S. An Experimental Study on Upper Limb Position Invariant EMG Signal Classification Based on Deep Neural Network. Biomed. Signal Process. Control 2020, 55, 101669. [Google Scholar] [CrossRef]
- Boschmann, A.; Platzner, M. Reducing the Limb Position Effect in Pattern Recognition Based Myoelectric Control Using a High Density Electrode Array. In Proceedings of the 2013 ISSNIP Biosignals and Biorobotics Conference: Biosignals and Robotics for Better and Safer Living (BRC), Rio de Janeiro, Brazil, 18–20 February 2013; pp. 1–5. [Google Scholar]
- Betthauser, J.L.; Hunt, C.L.; Osborn, L.E.; Kaliki, R.R.; Thakor, N.V. Limb-Position Robust Classification of Myoelectric Signals for Prosthesis Control Using Sparse Representations. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 6373–6376. [Google Scholar]
- Muscle Synergies and Isometric Torque Production: Influence of Supination and Pronation Level on Elbow Flexion—PubMed. Available online: https://pubmed.ncbi.nlm.nih.gov/8229181/ (accessed on 8 October 2023).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Gender | Age | Dominant Hand | Upper Arm Length (cm) |
|---|---|---|---|---|
| S1 | female | 21 | right | 35 |
| S2 | male | 21 | right | 33 |
| S3 | male | 22 | right | 36 |
| S4 | female | 22 | right | 30 |
| S5 | female | 22 | right | 28 |
| S6 | male | 25 | right | 34 |
| S7 | male | 24 | right | 35 |
| S8 | female | 23 | right | 31 |
| S9 | male | 24 | right | 29 |
| S10 | male | 22 | right | 32 |
| No. | Age | Dominant Hand | Amputation Side | Amputation Years | Amputation Reason | Amputation Side Length (cm) | Complete Upper Arm Length (cm) |
|---|---|---|---|---|---|---|---|
| TH1 | 41 | right | left | 9 | industrial injury | 23 cm | 31 cm |
| TH2 | 39 | right | left | 5 | industrial injury | 25 cm | 33 cm |
| No. | Labeled Source Domain Data | Unlabeled Target Domain Data | Testing Data |
|---|---|---|---|
| 1 | x, y, z | \ | x |
| 2 | x | y | x |
| 3 | x | y | y |
| 4 | x | y | z |
| 5 | x, y, z | y | y |
| 6 | x, y, z | y | NOT y |
| Module | Accuracy (%) | Precision (%) | Recall (%) | Specificity (%) | F1 Score (%) |
|---|---|---|---|---|---|
| Stem | 88.71 ± 9.43 * | 91.53 ± 7.85 * | 91.85 ± 7.15 * | 97.82 ± 1.54 * | 91.72 ± 7.45 * |
| Inception A | 90.24 ± 3.55 * | 93.58 ± 6.29 * | 91.82 ± 6.14 * | 97.82 ± 1.57 * | 92.62 ± 6.98 * |
| Inception B | 90.07 ± 5.71 * | 93.68 ± 6.85 * | 91.91 ± 6.97 * | 96.87 ± 1.64 * | 92.71 ± 5.14 * |
| Inception C | 95.70 ± 1.27 | 94.34 ± 4.04 | 92.81 ± 6.35 | 97.94 ± 1.55 | 93.57 ± 6.19 |
| No. | Labeled Source Domain Data | Unlabeled Target Domain Data | Testing Data | Accuracy (%) |
|---|---|---|---|---|
| 1 | x, y, z | \ | x | 42.08 ± 8.21 |
| 2 | x | y | x | 43.61 ± 8.77 |
| 3 | x | y | y | 94.93±3.21 |
| 4 | x | y | z | 40.60 ± 9.68 |
| 5 | x, y, z | y | y | 94.06±4.18 |
| 6 | x, y, z | y | NOT y | 58.43 ± 8.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Sun, W.; Li, W.; Yu, H. Enhancing Robustness of Surface Electromyography Pattern Recognition at Different Arm Positions for Transhumeral Amputees Using Deep Adversarial Inception Domain Adaptation. Appl. Sci. 2024, 14, 3417. https://doi.org/10.3390/app14083417
Li S, Sun W, Li W, Yu H. Enhancing Robustness of Surface Electromyography Pattern Recognition at Different Arm Positions for Transhumeral Amputees Using Deep Adversarial Inception Domain Adaptation. Applied Sciences. 2024; 14(8):3417. https://doi.org/10.3390/app14083417
Chicago/Turabian StyleLi, Sujiao, Wanjing Sun, Wei Li, and Hongliu Yu. 2024. "Enhancing Robustness of Surface Electromyography Pattern Recognition at Different Arm Positions for Transhumeral Amputees Using Deep Adversarial Inception Domain Adaptation" Applied Sciences 14, no. 8: 3417. https://doi.org/10.3390/app14083417