
A Novel Hybrid Semi-Active Mass Damper Configuration for Structural Applications


Abstract
:
1. Introduction
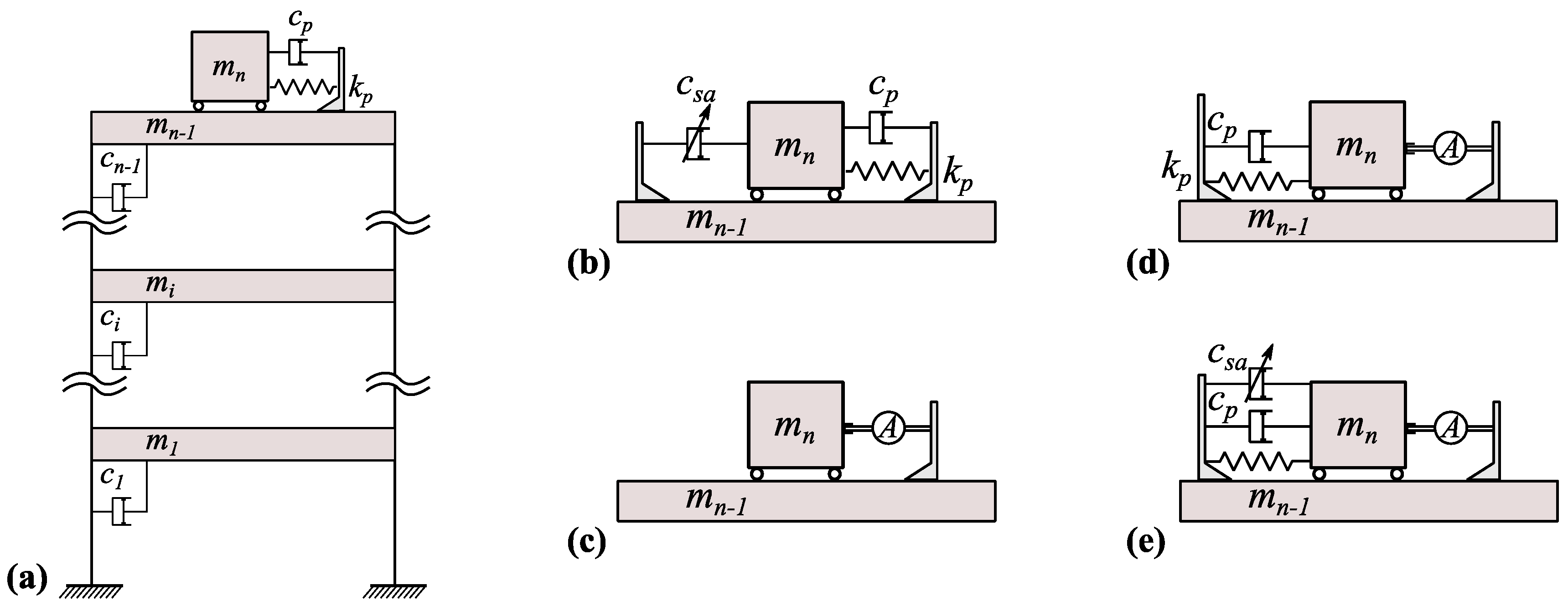
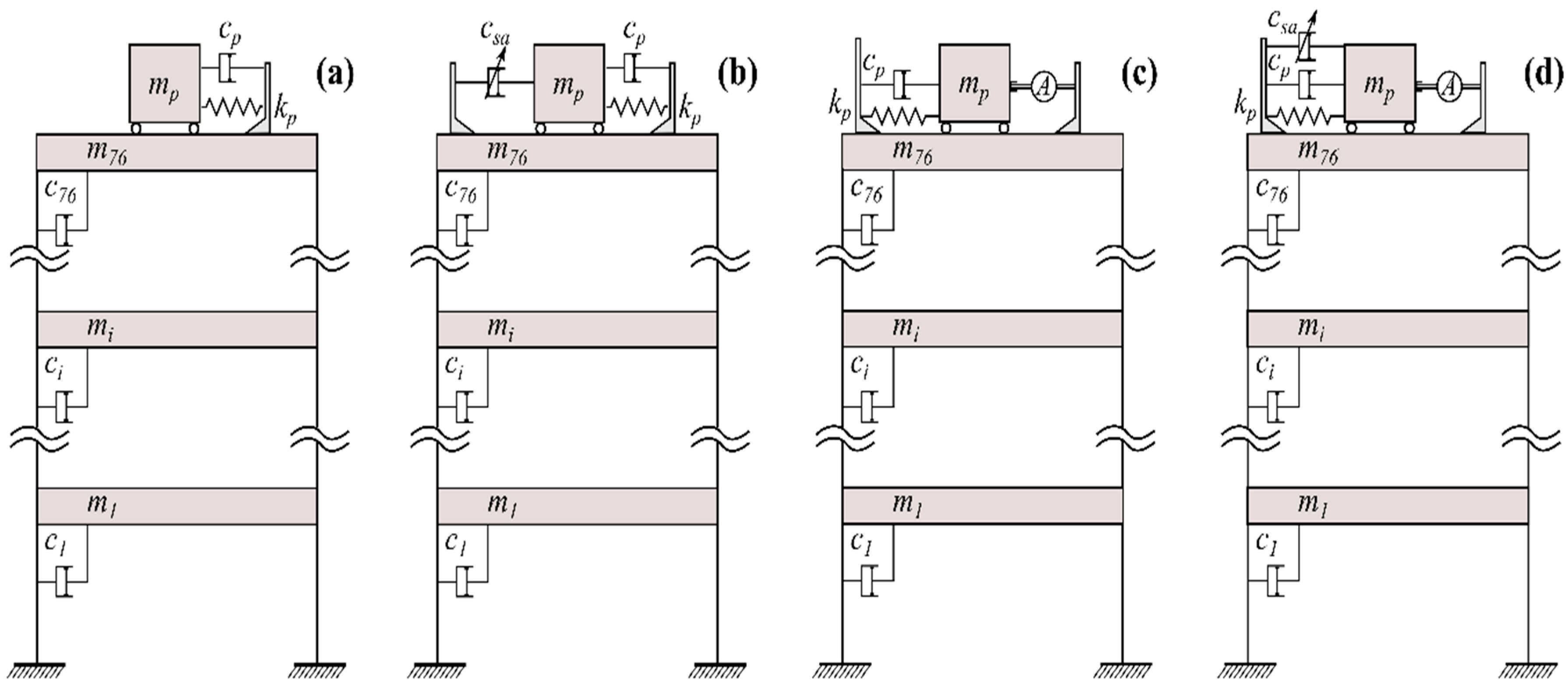
2. Modeling Principles
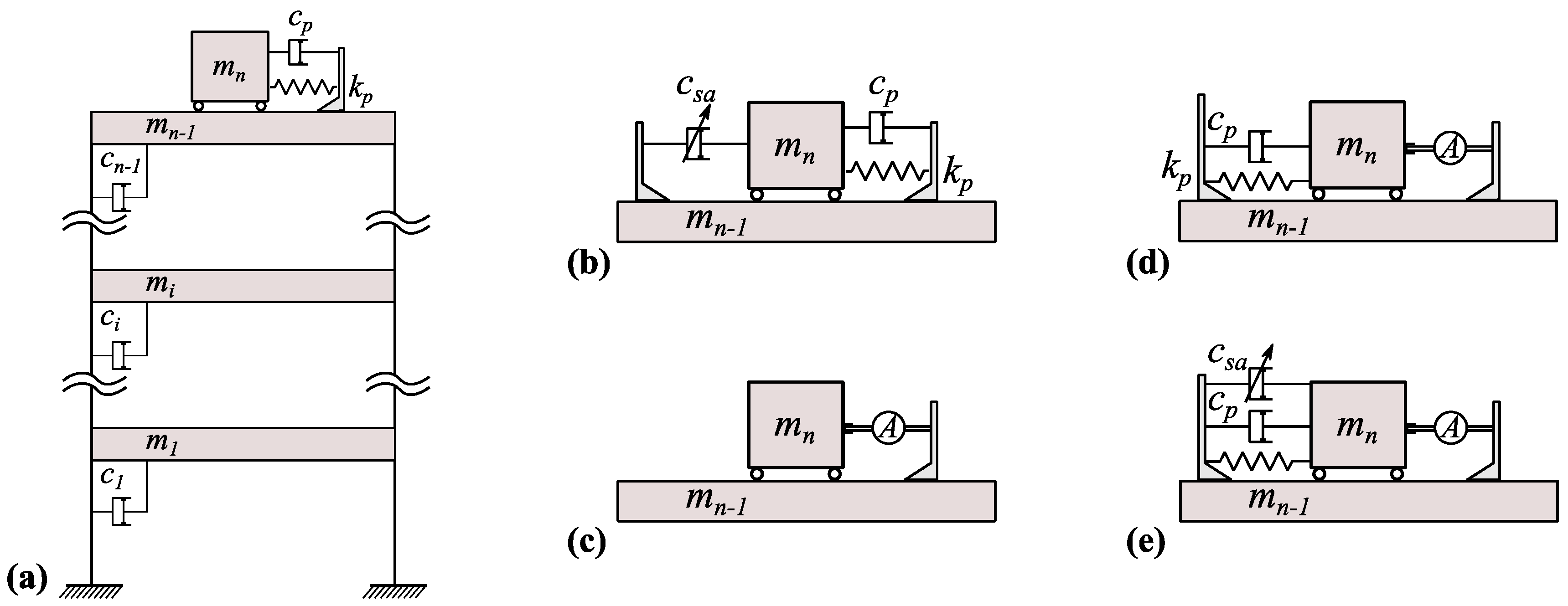
2.1. General Dynamic Vibration Absorbers (DVA) Modeling Approach
2.1.1. Passive Tuned Mass Damper (TMD) Control
2.1.2. Active Mass Damper (AMD) Control and Hybrid Active-Tuned Mass Damper (ATMD) Control
2.1.3. Semi-Active Tuned Mass Damper (STMD) Control
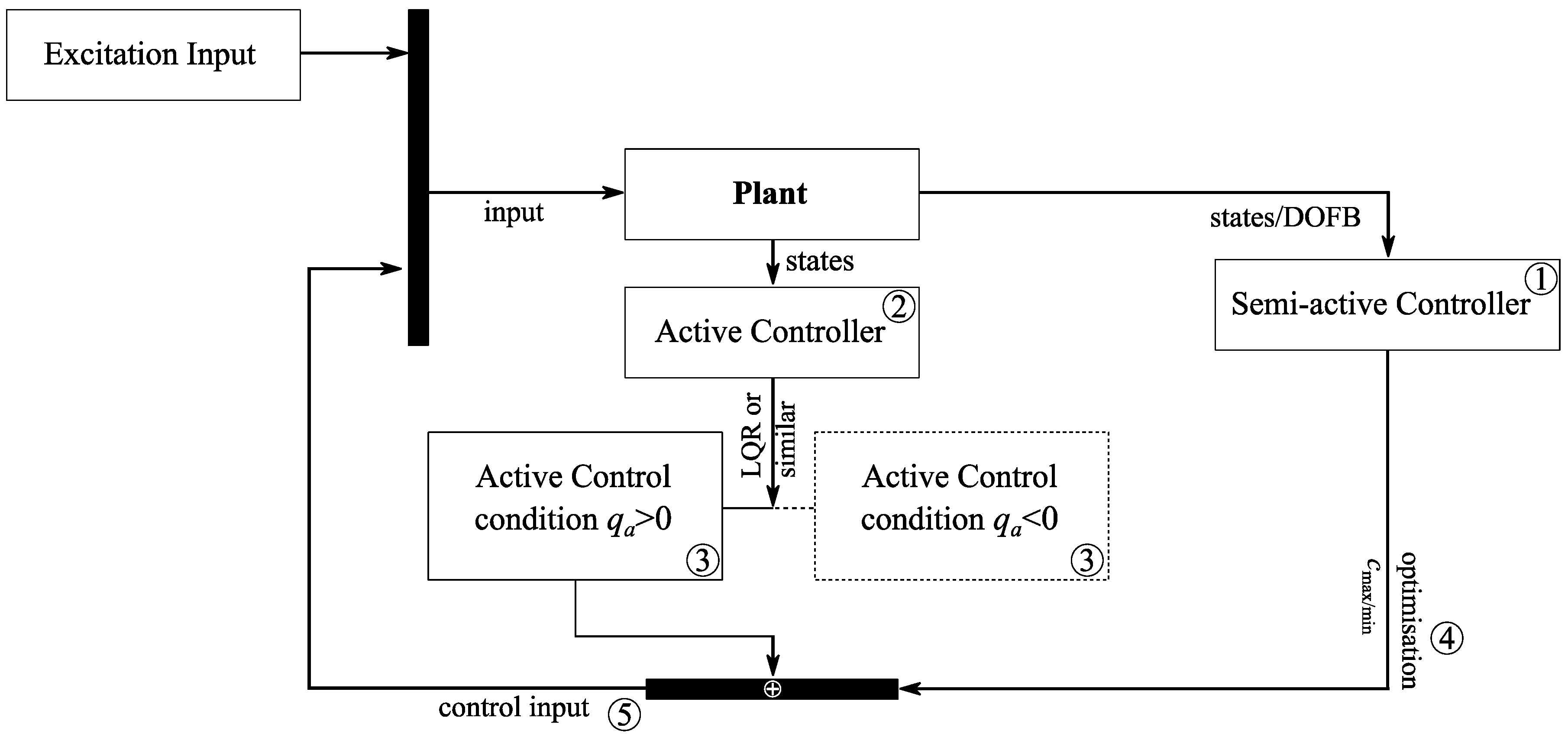
2.2. Modeling the Semi-Active Hybrid Mass Damper
- (1)
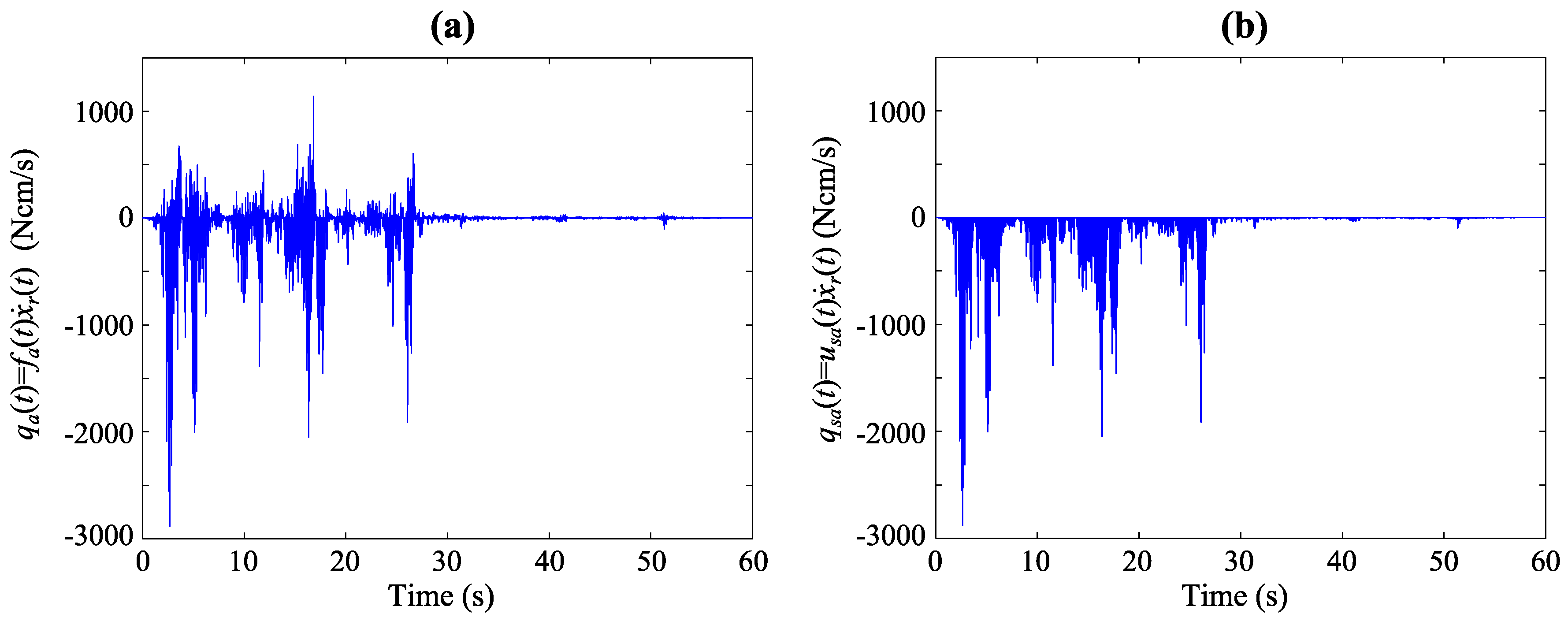
- Design of a semi-active controller based either on an active controller that is clipped using Equation (7) for semi-active control purposes or using direct output feedback control algorithms such as the ones found in the groundhook control scheme for alleviation of the online computational burden of Equations (7) and (8).
- (2)
- Design an active controller using active control algorithms such as LQR, PID or similar designed to satisfy performance and robustness specifications of the non-linear system (i.e., system including the semi-active controller).
- (3)
- Limit the capacity of the active actuator to only add power to the system:
- (4)
- Incorporation of both active and semi-active forces to the system using:
- (5)
- Optimisation of maximum and minimum damping ratios of the semi-active control device for the case of on-off control.
3. Control Methods
4. Numerical Investigation
4.1. Single Degree of Freedom (SDOF) Structural Configuration
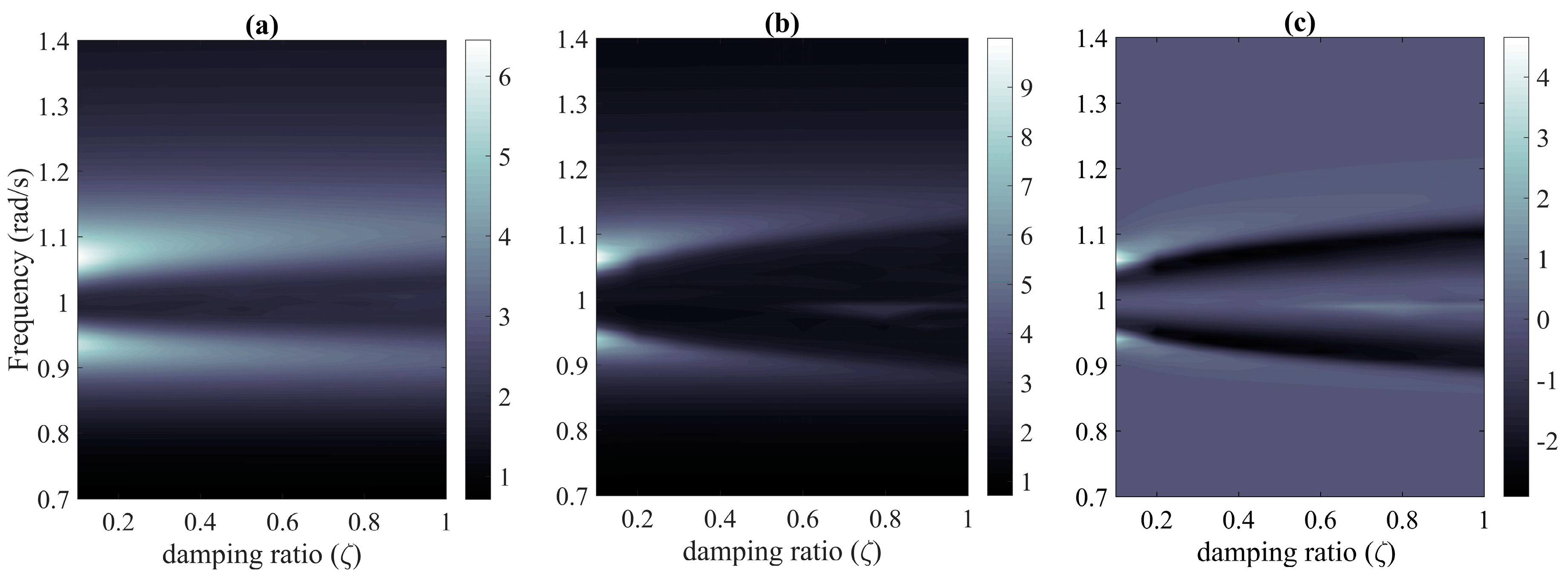
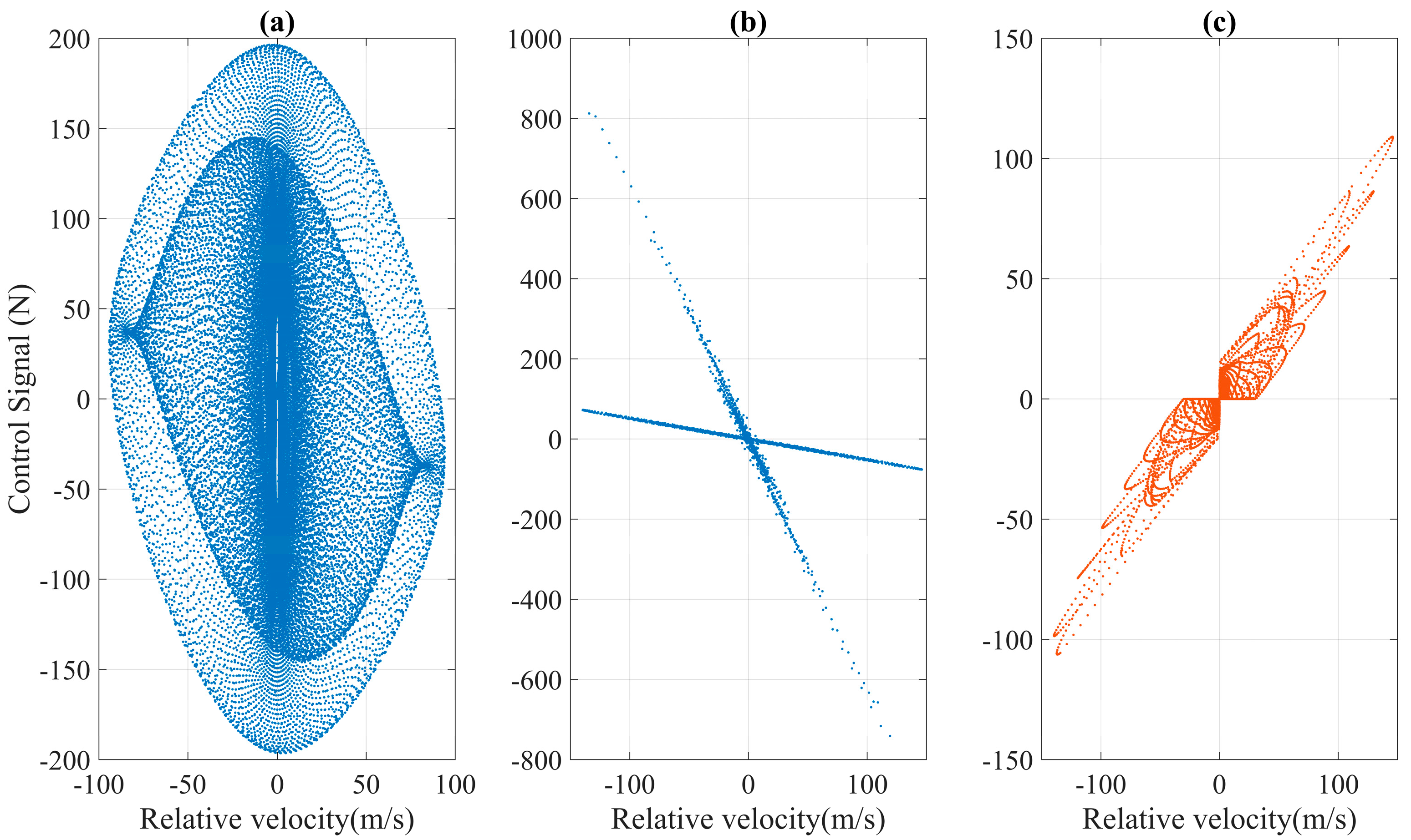
4.2. Variable Damping Coefficient Configuration
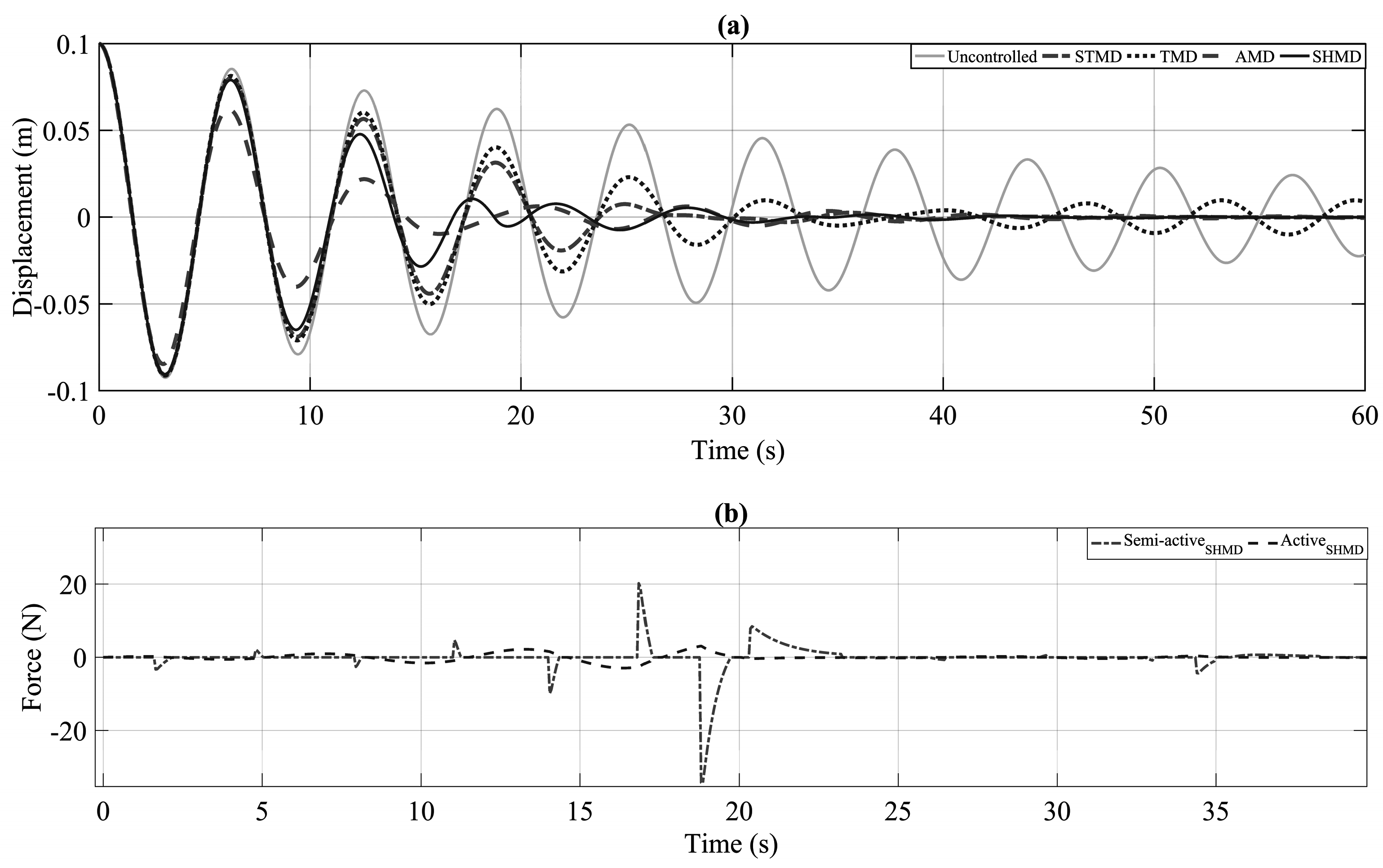
4.3. Free Vibration Analysis
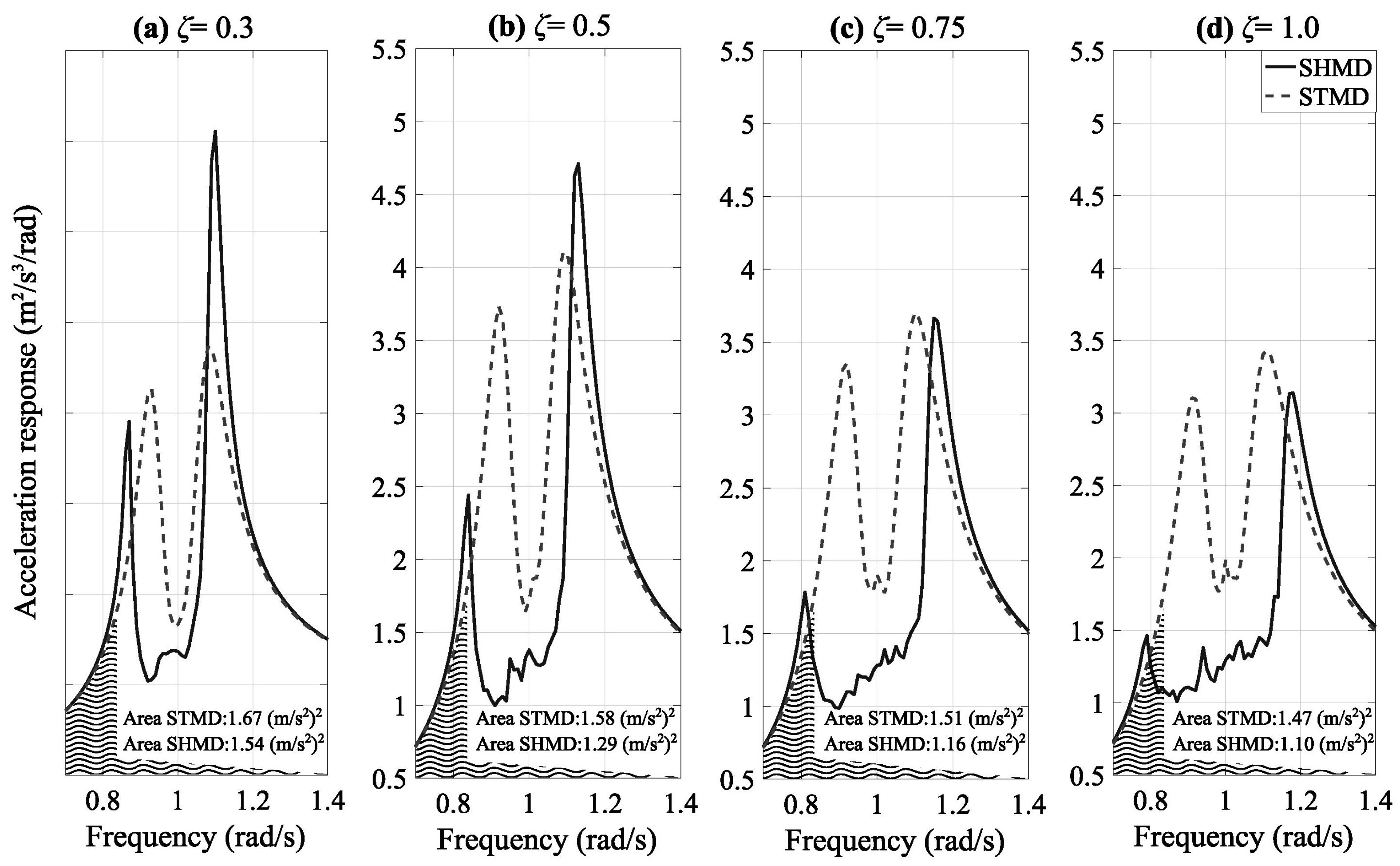
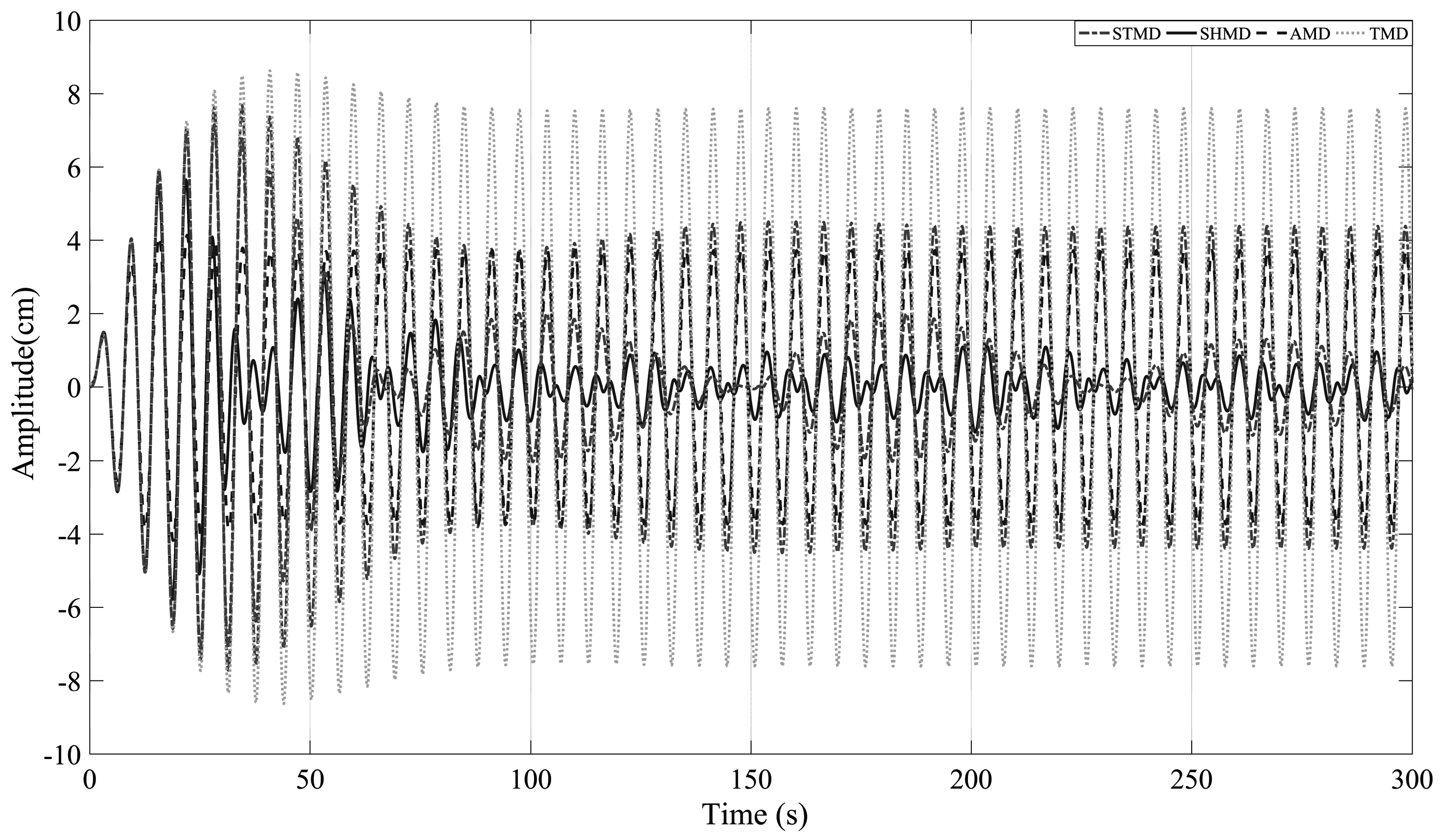
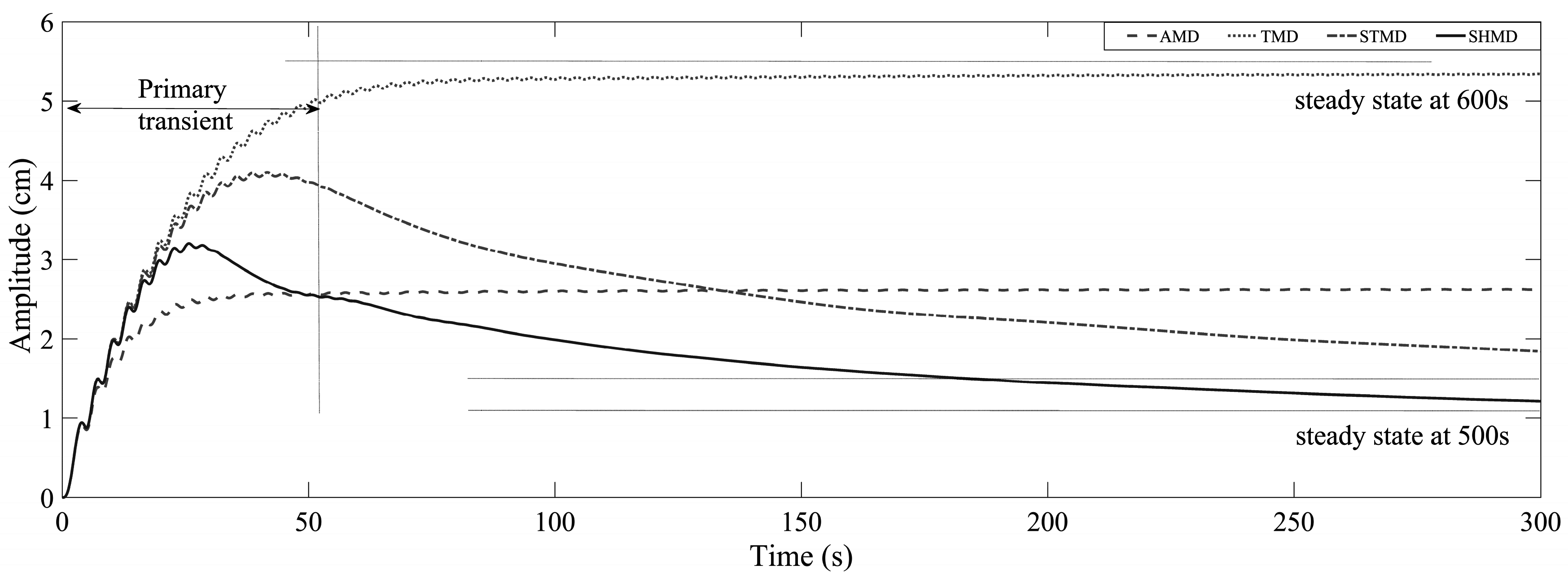
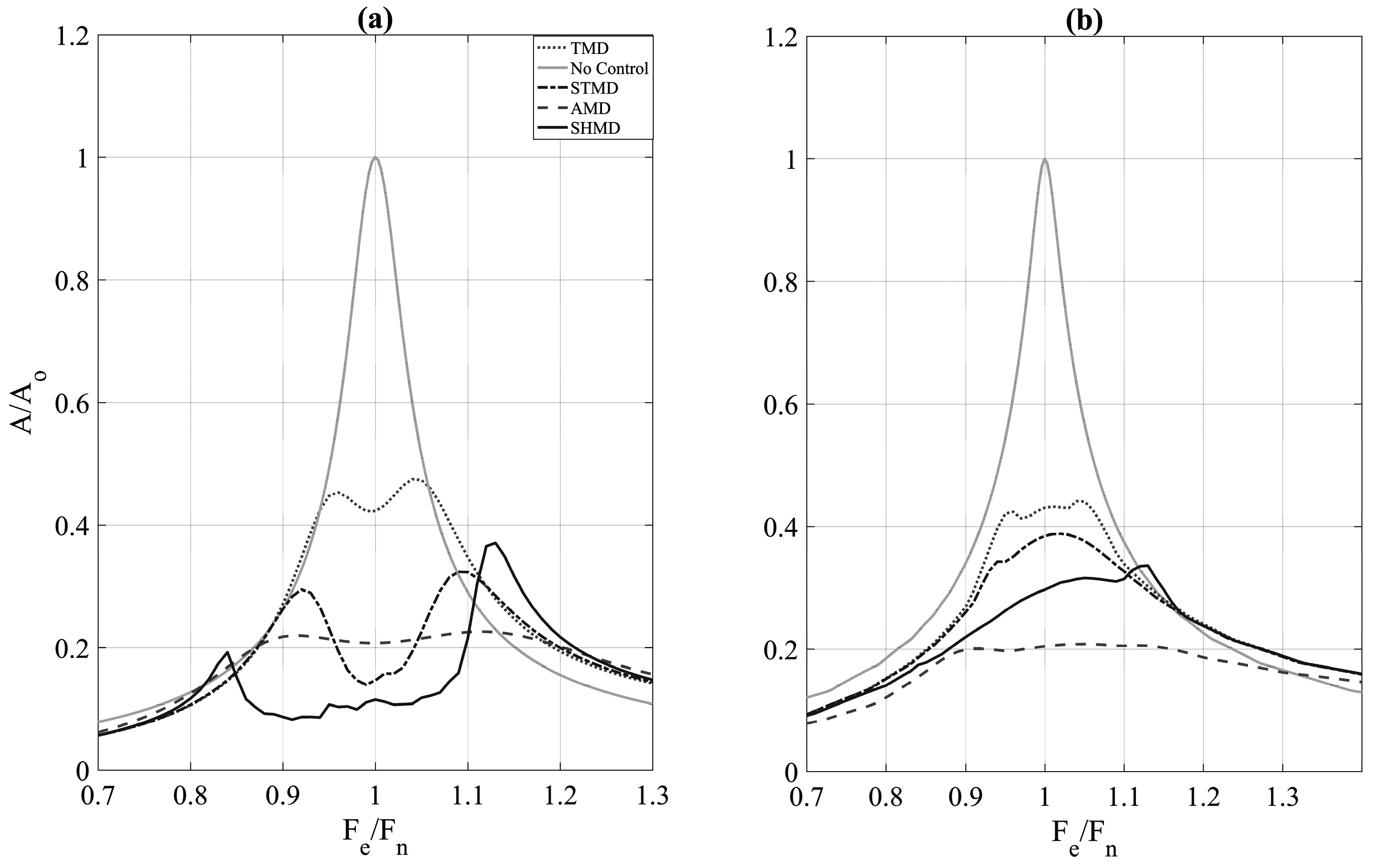
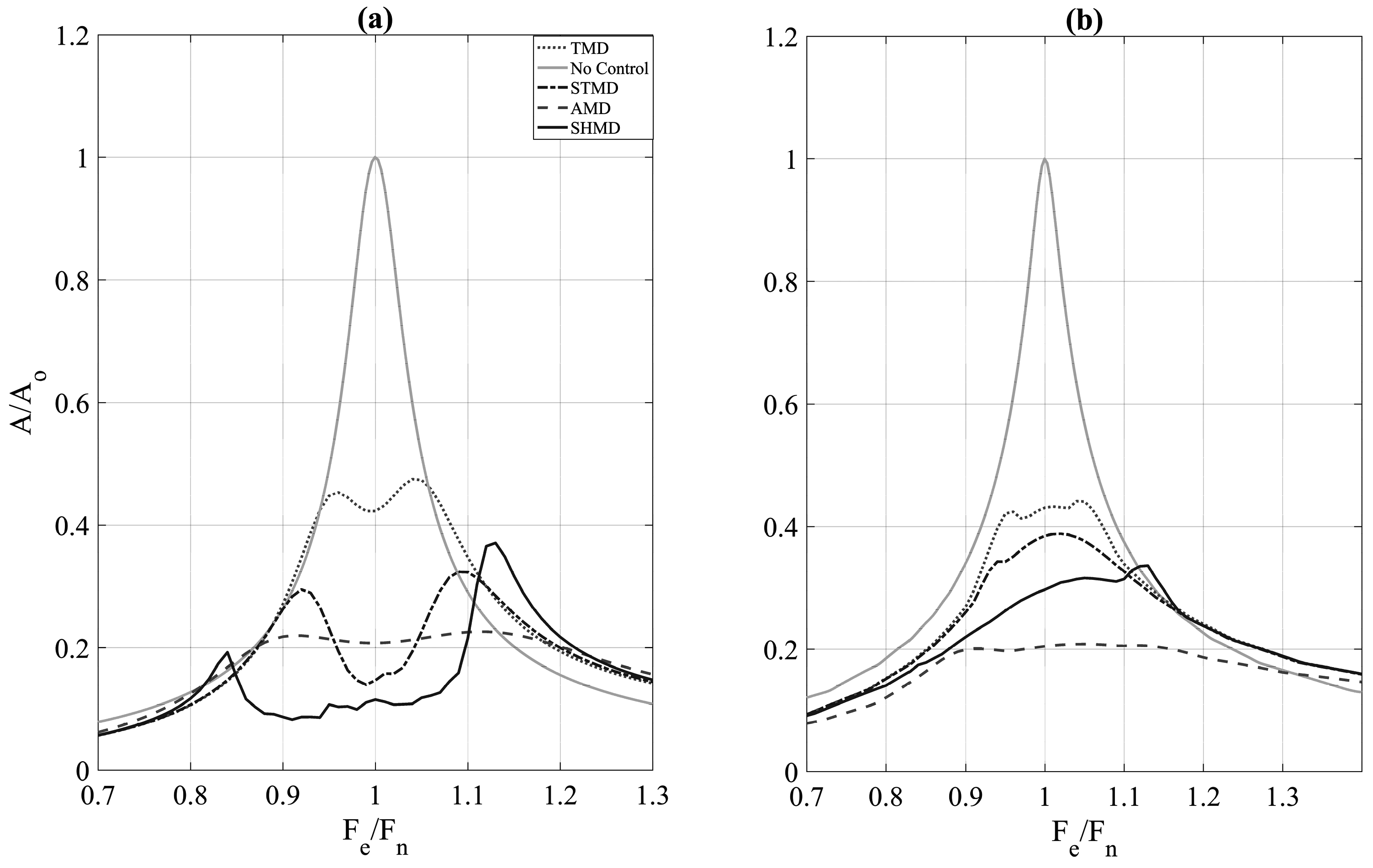
4.4. Forced Vibration
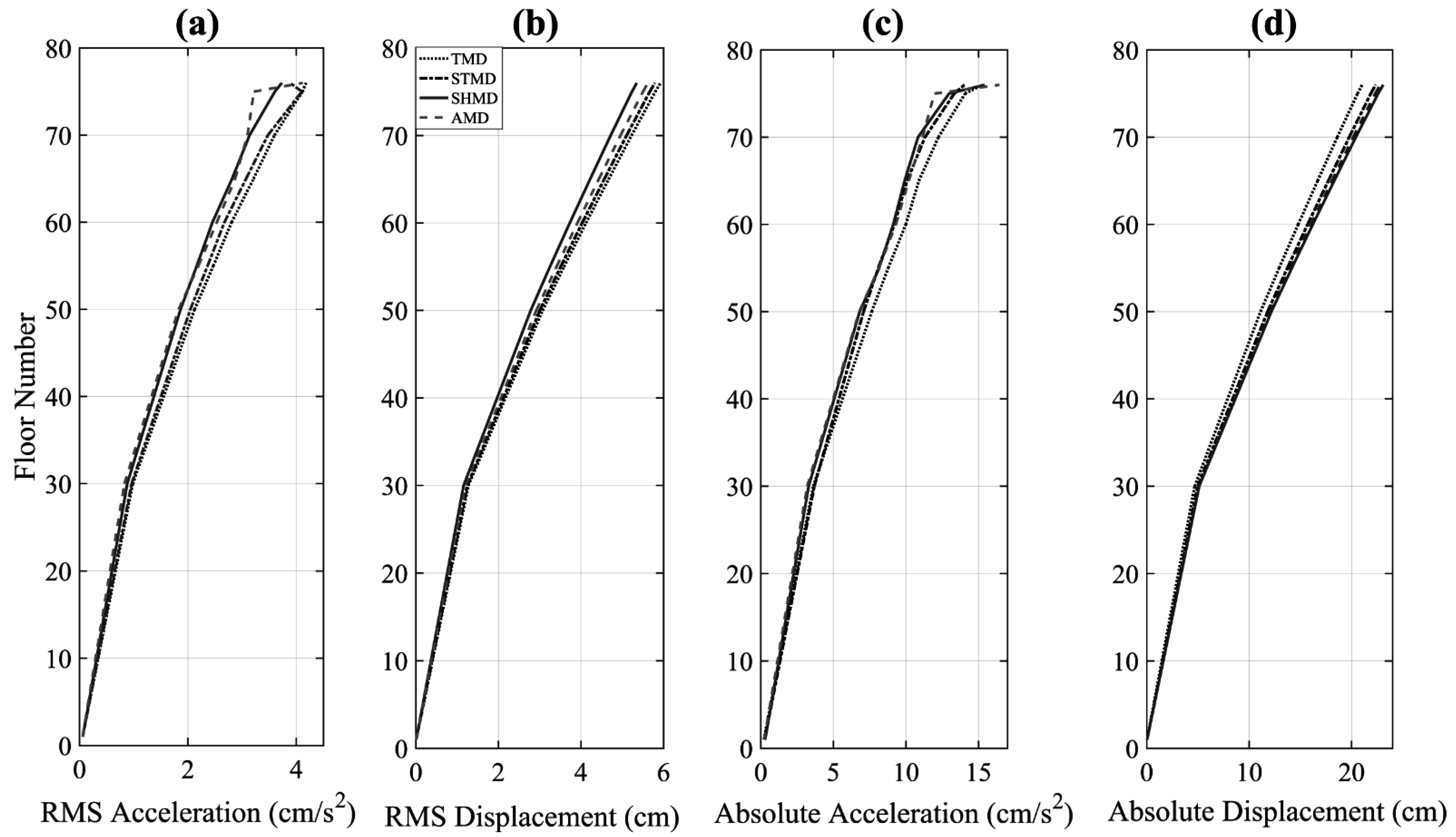
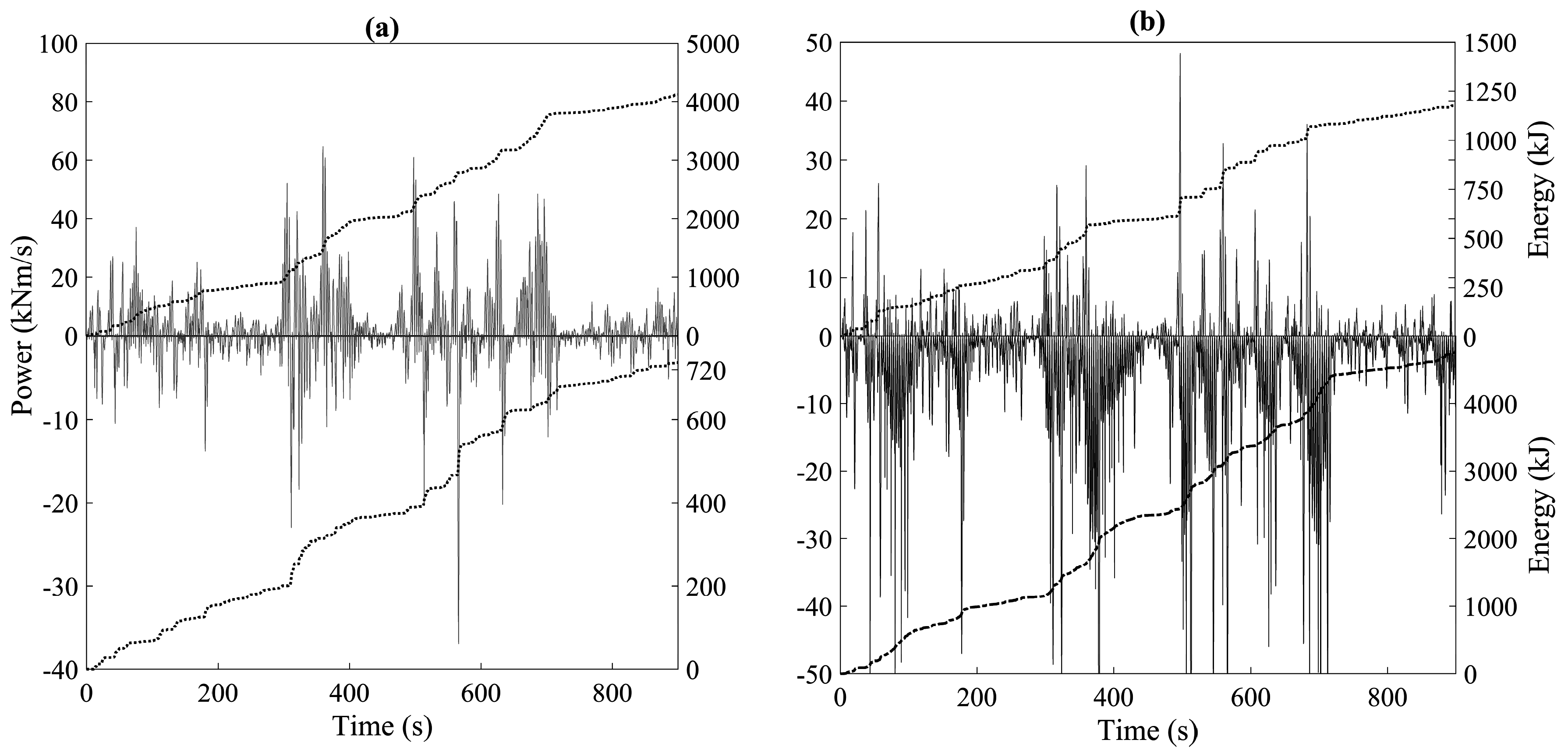
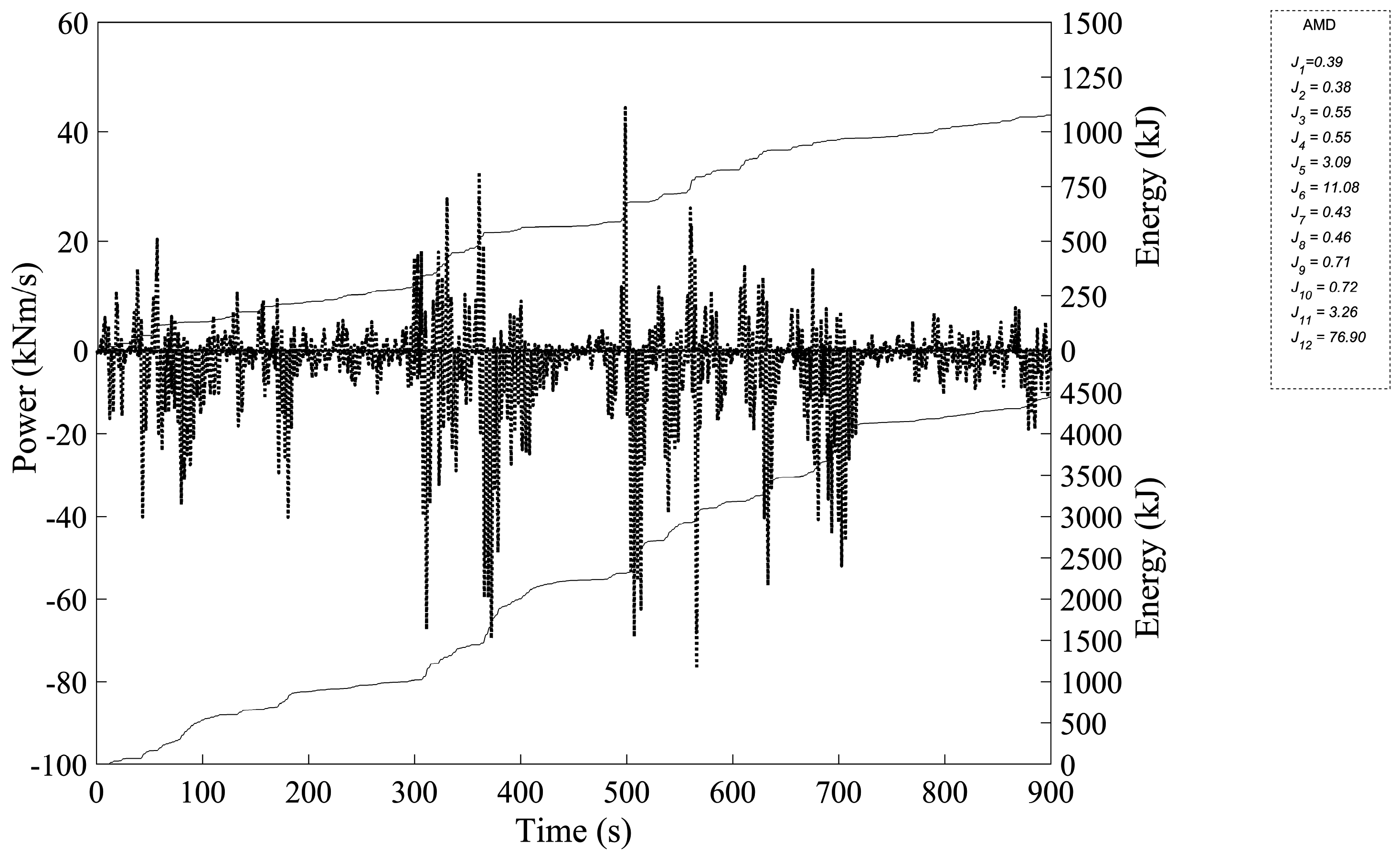
4.5. High-Rise Structural Configuration
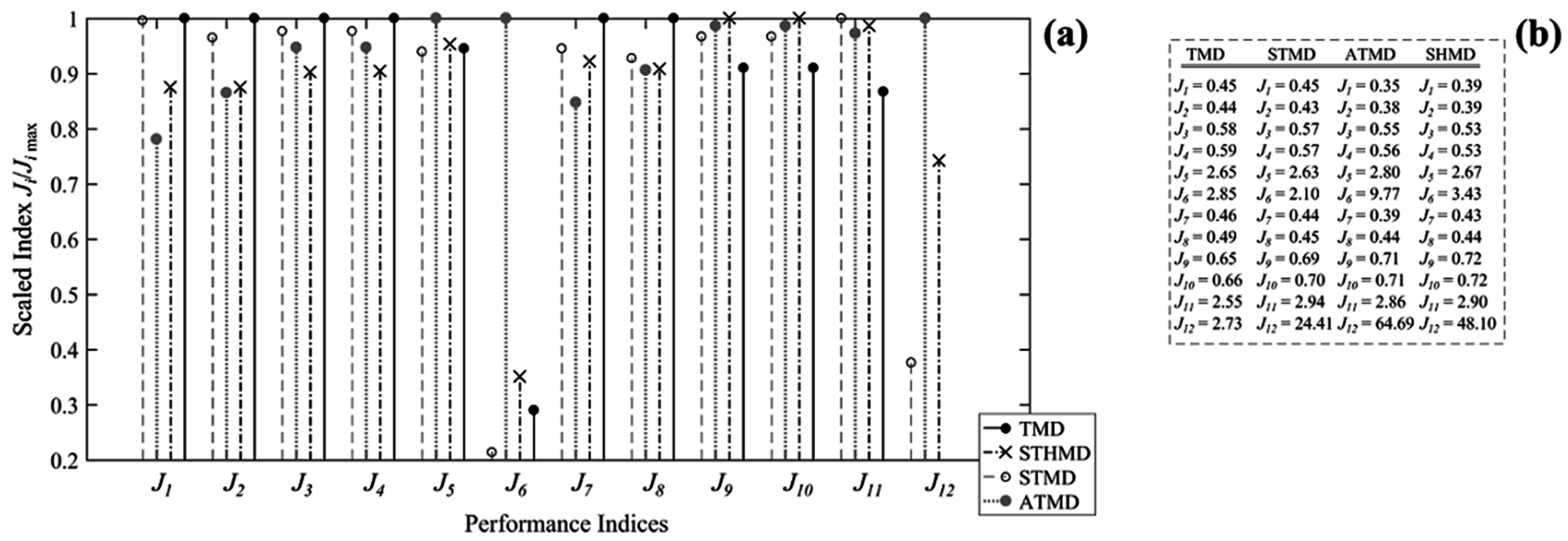
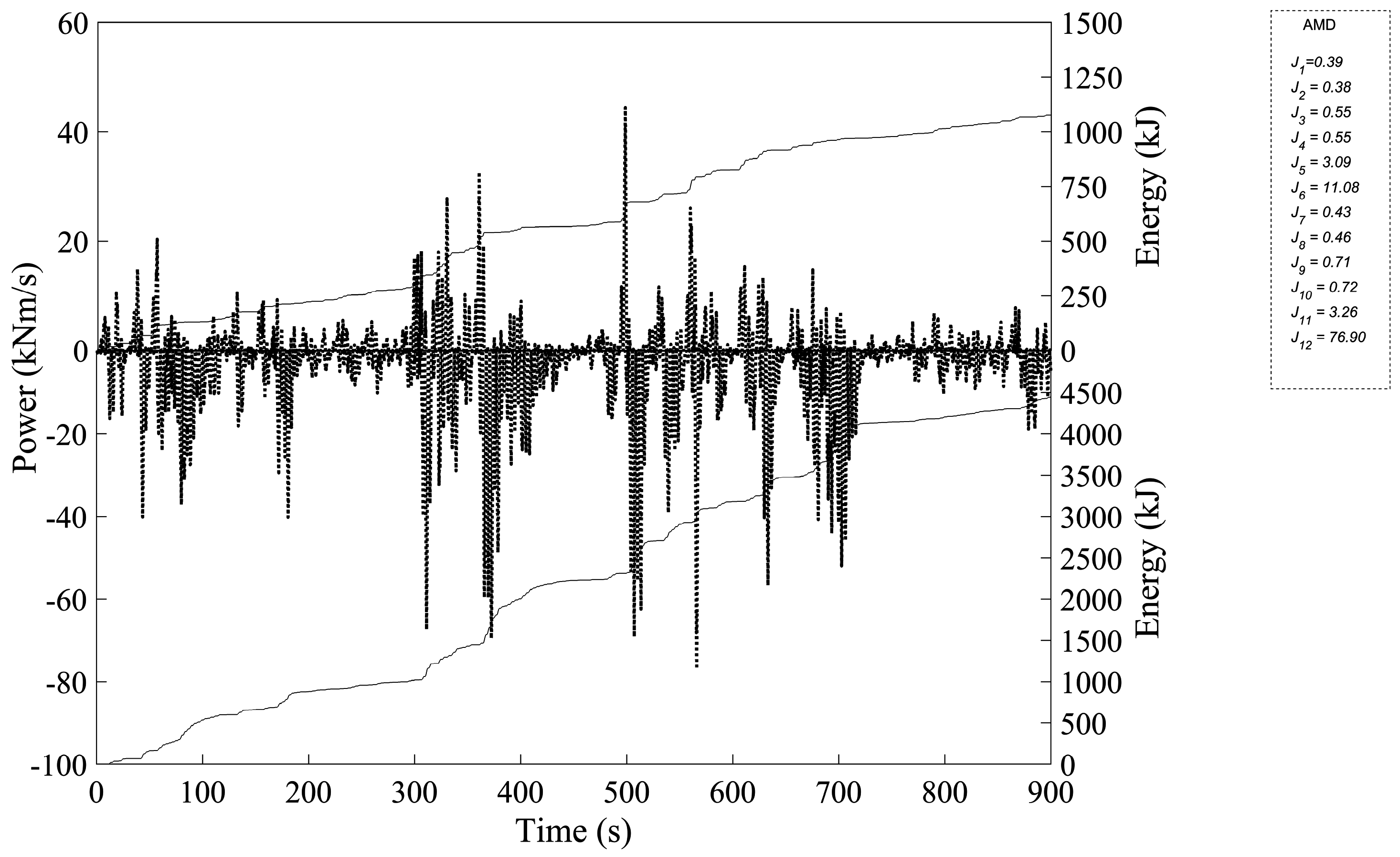
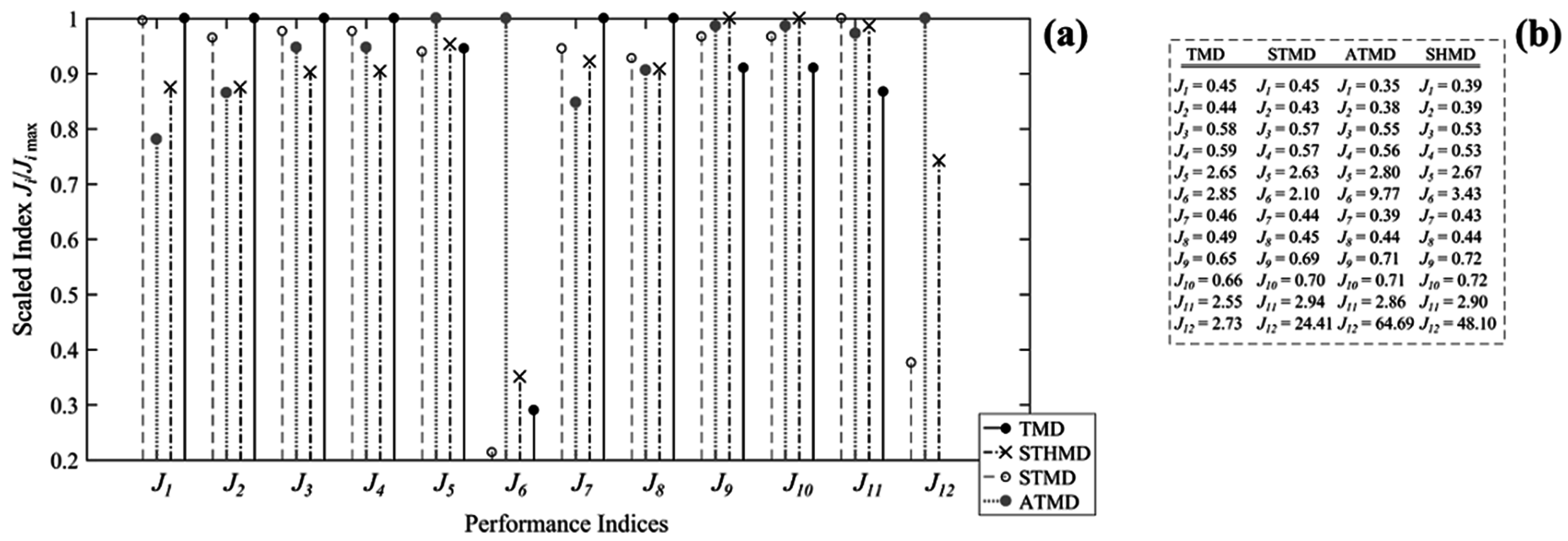
4.6. Evaluation Criteria
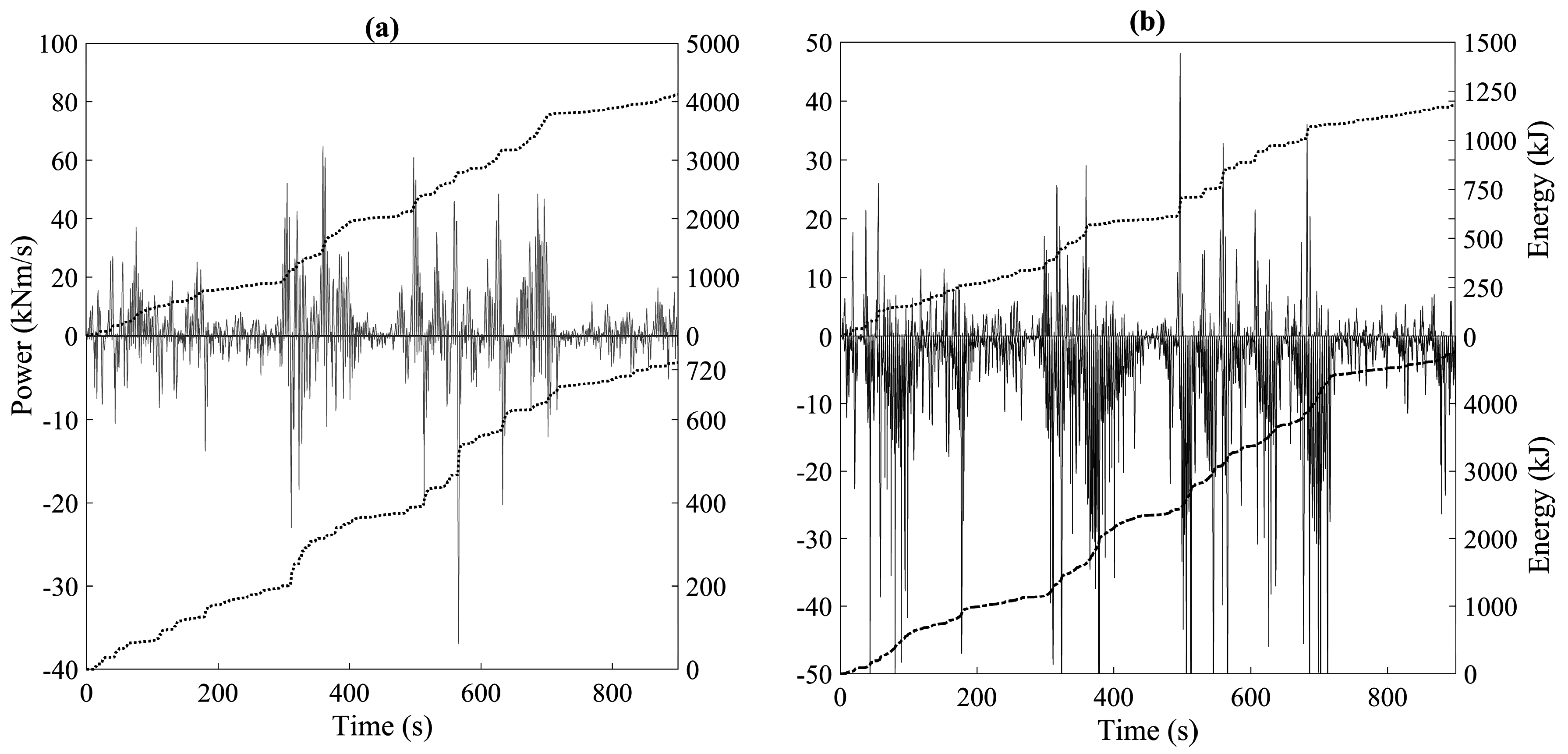
5. Simulation Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Holmes, D.J. Wind Loading of Structures; CRC Press: Sound Parkway NW, FL, USA, 2007. [Google Scholar]
- Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. Passive and active mass damper control of the response of tall buildings to wind gustiness. Eng. Struct. 2003, 25, 1199–1209. [Google Scholar] [CrossRef]
- Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, L.; Cheng, B.; Zhang, X. An active mass damper using rotating actuator for structural vibration control. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef]
- Haertling, G. Rainbow ceramics: A new type of ultra-high displacement actuator. Am. Ceram. Soc. Bull. 1994, 73, 93–96. [Google Scholar]
- Scruggs, J.; Iwan, W. Control of a civil structure using an electric machine with semiactive capability. J. Struct. Eng. 2003, 129, 951–959. [Google Scholar] [CrossRef]
- Zhang, C.; Ou, J. Modeling and dynamical performance of the electromagnetic mass driver system for structural vibration. Eng. Struct. 2015, 82, 93–103. [Google Scholar] [CrossRef]
- Ikeda, Y. Active and semi-active vibration control of buildings in Japan—Practical applications and verification. Struct. Control Health Monit. 2009, 16, 703–723. [Google Scholar] [CrossRef]
- Fujinami, T.; Saito, Y.; Masayuki, M.; Koike, Y.; Tanida, K. A hybrid mass damper system controlled by Hinfity control theory for reducing bending-torsion vibration of an actual building. Earthq. Eng. Struct. Dyn. 2001, 30, 1639–1643. [Google Scholar] [CrossRef]
- Nakamura, Y.; Tanaka, K.; Nakayama, M.; Fujita, T. Hybrid mass dampers using two types of electric servomotors:AC servomotors and linear-induction servomotors. Earthq. Eng. Struct. Dyn. 2001, 30, 1719–1743. [Google Scholar] [CrossRef]
- Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676. [Google Scholar] [CrossRef]
- Mitchel, R.; Kim, Y.; El-Khorchi, T. Wavelet neuro-fuzzy control of hybrid building-active tuned mass damper system under seismic excitations. J. Vib. Control 2012. [Google Scholar] [CrossRef]
- Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29. [Google Scholar]
- Li, C.; Cao, B. Hybrid active tuned mass dampers for structures under the ground acceleration. Struct. Control Health Monit. 2015, 22, 757–773. [Google Scholar] [CrossRef]
- Tso, M.H.; Yuan, J.; Wong, W.O. Hybrid vibration absorber with detached design for global vibration control. J. Vib. Control. 2016. [Google Scholar] [CrossRef]
- Khan, I.U.; Wagg, D.; Sims, N.D. Improving the vibration suppression capabilities of a magneto-rheological damper using hybrid active and semi-active control. Smart Mater. Struct. 2016, 25, 085045. [Google Scholar] [CrossRef]
- Demetriou, D.; Nikitas, N.; Tsavdaridis, K.D. A Novel Hybrid Semi-active Tuned Mass Damper for Lightweight Steel Structural Applications. In Proceedings of the IJSSD Symposium on Progress in Structural Stability and Dynamics, Lisbon, Portugal, 21–24 July 2015.
- Ricciardelli, F.; Occhiuzzi, A.; Clemente, P. Semi-active tuned mass damper control strategy for wind-excited structures. J. Wind Eng. Ind. Aerodyn. 2000, 88, 57–74. [Google Scholar] [CrossRef]
- Hartog, D. Mechanical Vibrations; McGraw-Hill Book Company: New York, NY, USA, 1956. [Google Scholar]
- Ghosh, A.; Basu, B. A closed-form optimal tuning criterion for TMD in damped structures. Struct. Control Health Monit. 2007, 14, 681–692. [Google Scholar] [CrossRef]
- Demetriou, D.; Nikitas, N.; Tsavdaridis, K.D. Performance of fixed-parameter control algorithms on high-rise structures equipped with semi-active tuned mass dampers. Struct. Des. Tall Spec. Build. 2016, 25, 340–354. [Google Scholar] [CrossRef]
- Nelder, J.; Mead, R. A simplex method for function minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Hrovat, D.; Barak, P.; Rabins, M. Semi-Active Versus Passive or Active Tuned Mass Dampers for Structural Control. J. Eng. Mech. 1983, 109, 691–705. [Google Scholar] [CrossRef]
- Yang, N.J.; Akbarpour, A.; Ghaemmaghami, P. New Optimal Control Algorithms for Structural Control. J. Eng. Mech. 1987, 113, 1369–1386. [Google Scholar] [CrossRef]
- Soong, T.T. Active Structural Control: Theory and Practice; John Wiley & Sons, Inc.: New York, NY, USA, 1990. [Google Scholar]
- Cheng, F.Y.; Jiang, H.; Lou, K. Smart Structures: Innovative Systems for Seismic Response Control; Taylor & Francis Group: New York, NY, USA, 2008. [Google Scholar]
- Viet, L.D.; Nghi, N.B.; Hieu, N.N.; Hung, D.T.; Linh, N.N.; Hung, L.X. On a combination of ground-hook controllers for semi-active tuned mass dampers. J. Mech. Sci. Technol. 2014, 28, 2059–2064. [Google Scholar] [CrossRef]
- Koo, J.H. Using Magneto-Rheological Dampers in Semiactive Tuned Vibration Absorbers to Control Structural Vibrations; Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2003. [Google Scholar]
- Koo, J.H.; Murray, T.M.; Setareh, M. In search of suitable control methods for semi-active tuned vibration absorbers. J. Vib. Control 2004, 10, 163–174. [Google Scholar] [CrossRef]
- Hac, A.; Youn, I. Optimal semi-active suspension with preview based on a quarter car model. J. Acoust. Vib. 1992, 114, 84–92. [Google Scholar] [CrossRef]
- Pinkaew, T.; Fujino, Y. Effectiveness of semi-active tuned mass dampers under harmonic excitation. Eng. Struct. 2001, 23, 850–856. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Varadarajan, N. Short time Fourier transform algorithm for wind response control of buildings with variable stiffness TMD. Eng. Struct. 2005, 27, 431–441. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | Max Damping Coefficient (kNs/m) | Min Damping Coefficient (kNs/m) | Equivalent Damping Ratio |
|---|---|---|---|
| TMD | 47 | 47 | 4.7% |
| STMD | 163.4 | 2.61 | 16%–2.6% |
| ATMD | 100 | 100 | 10% |
| SHMD | 168 | 39 | 16.8%–4% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demetriou, D.; Nikitas, N. A Novel Hybrid Semi-Active Mass Damper Configuration for Structural Applications. Appl. Sci. 2016, 6, 397. https://doi.org/10.3390/app6120397
Demetriou D, Nikitas N. A Novel Hybrid Semi-Active Mass Damper Configuration for Structural Applications. Applied Sciences. 2016; 6(12):397. https://doi.org/10.3390/app6120397
Chicago/Turabian StyleDemetriou, Demetris, and Nikolaos Nikitas. 2016. "A Novel Hybrid Semi-Active Mass Damper Configuration for Structural Applications" Applied Sciences 6, no. 12: 397. https://doi.org/10.3390/app6120397