Enhanced Prognostic Model for Lithium Ion Batteries Based on Particle Filter State Transition Model Modification

Abstract
:1. Introduction
2. Failure Modes of Lithium Ion Batteries
2.1. Battery Cell Shelf Discharge
2.2. Thermal Runway
2.3. Cell Imbalance
2.4. Capacity Fade
2.5. Power Fade
3. Diagnostic and Prognostic Framework Modelling
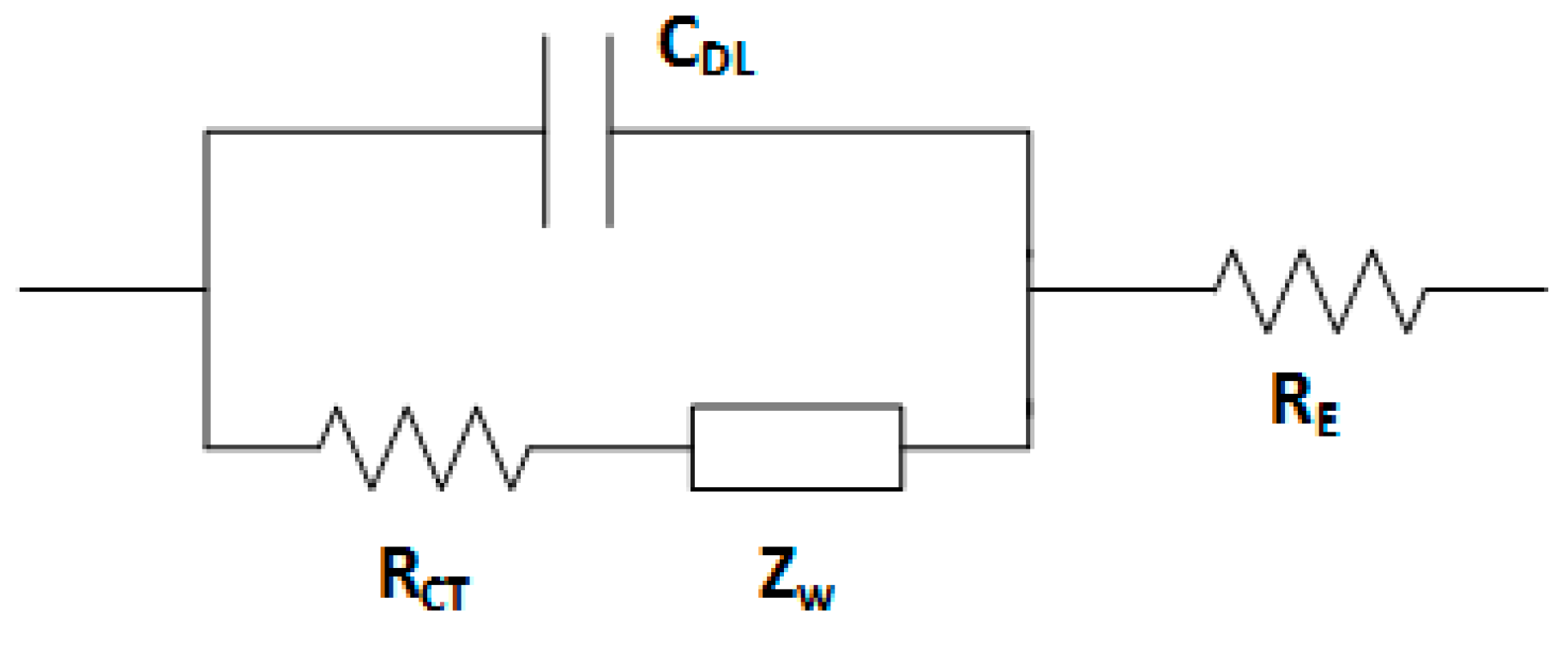
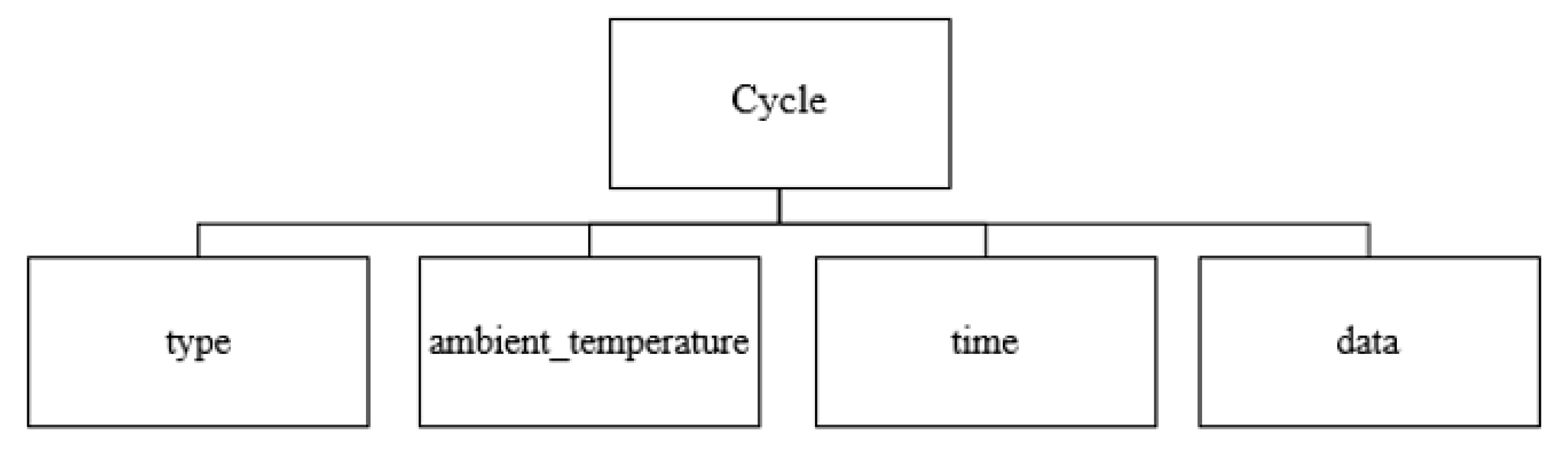
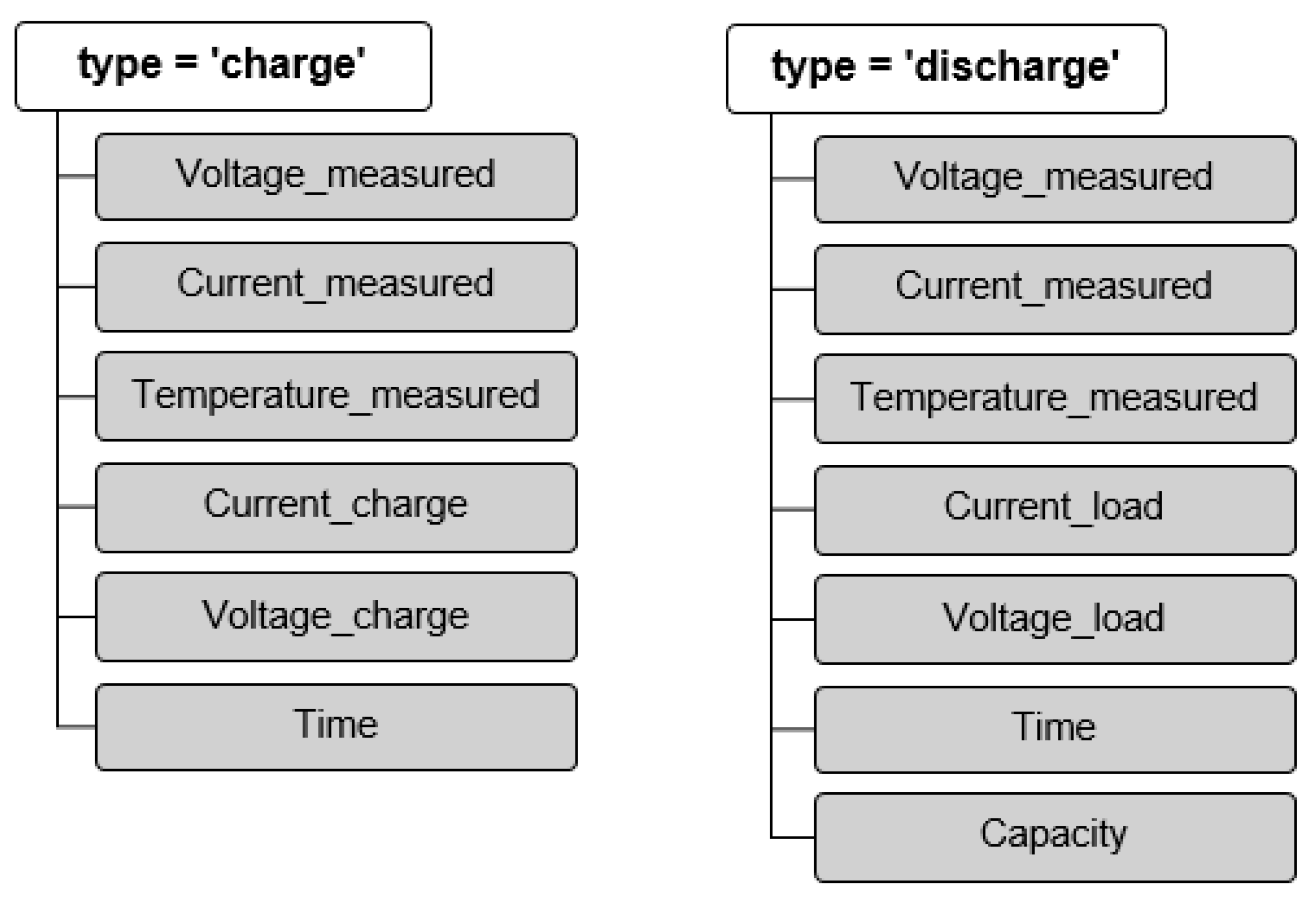
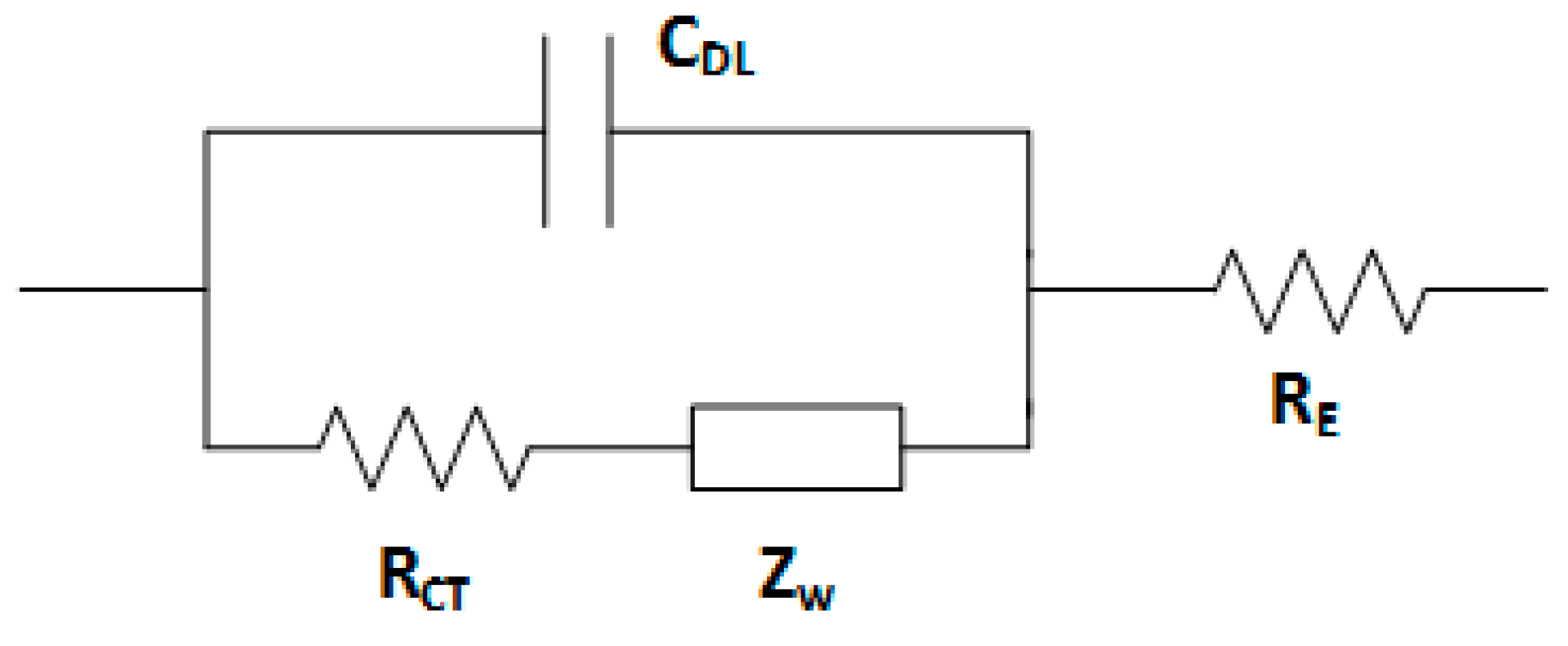
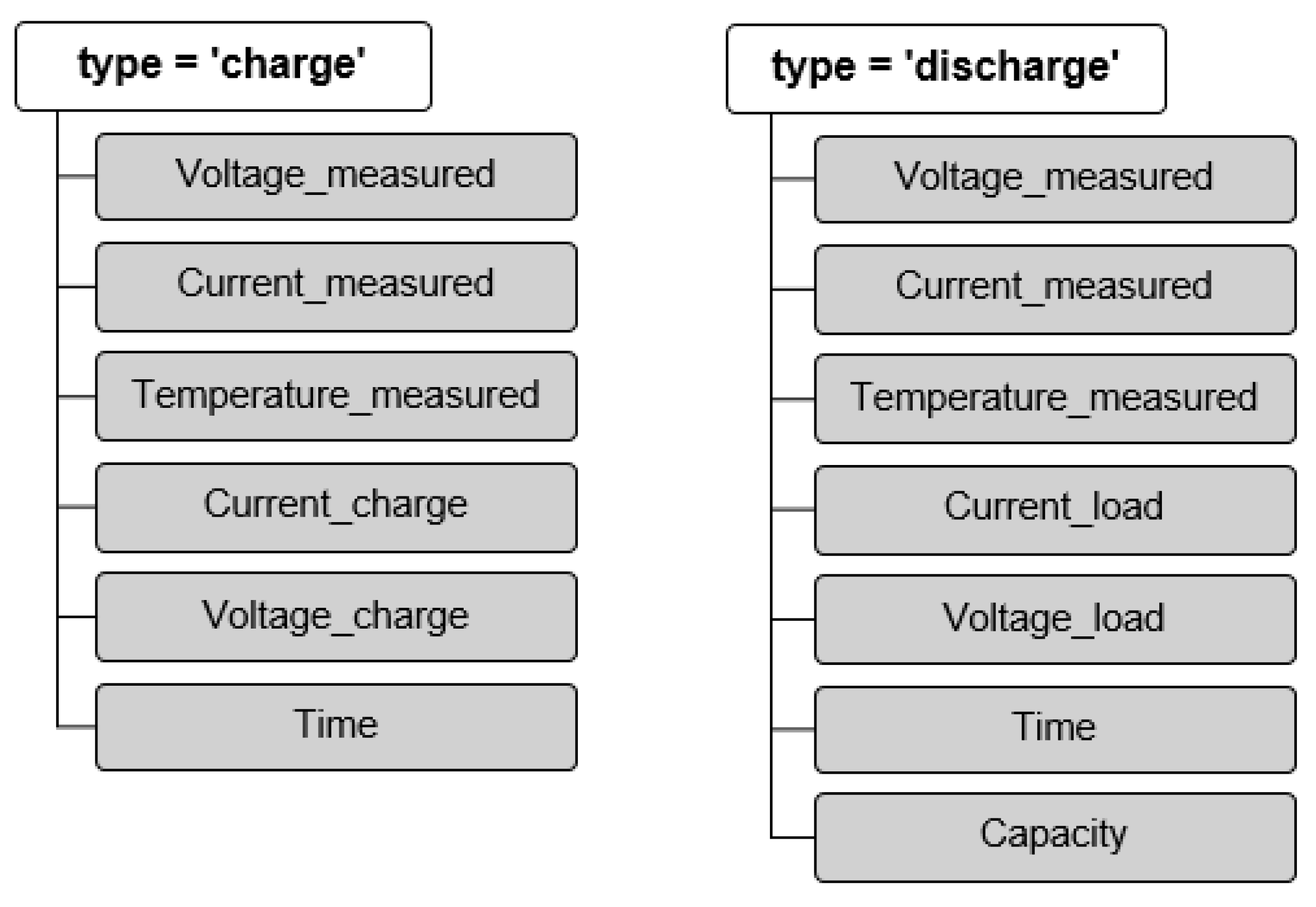
3.1. Battery Modeling and Feature Extraction
3.2. Battery Capacity Fade Model
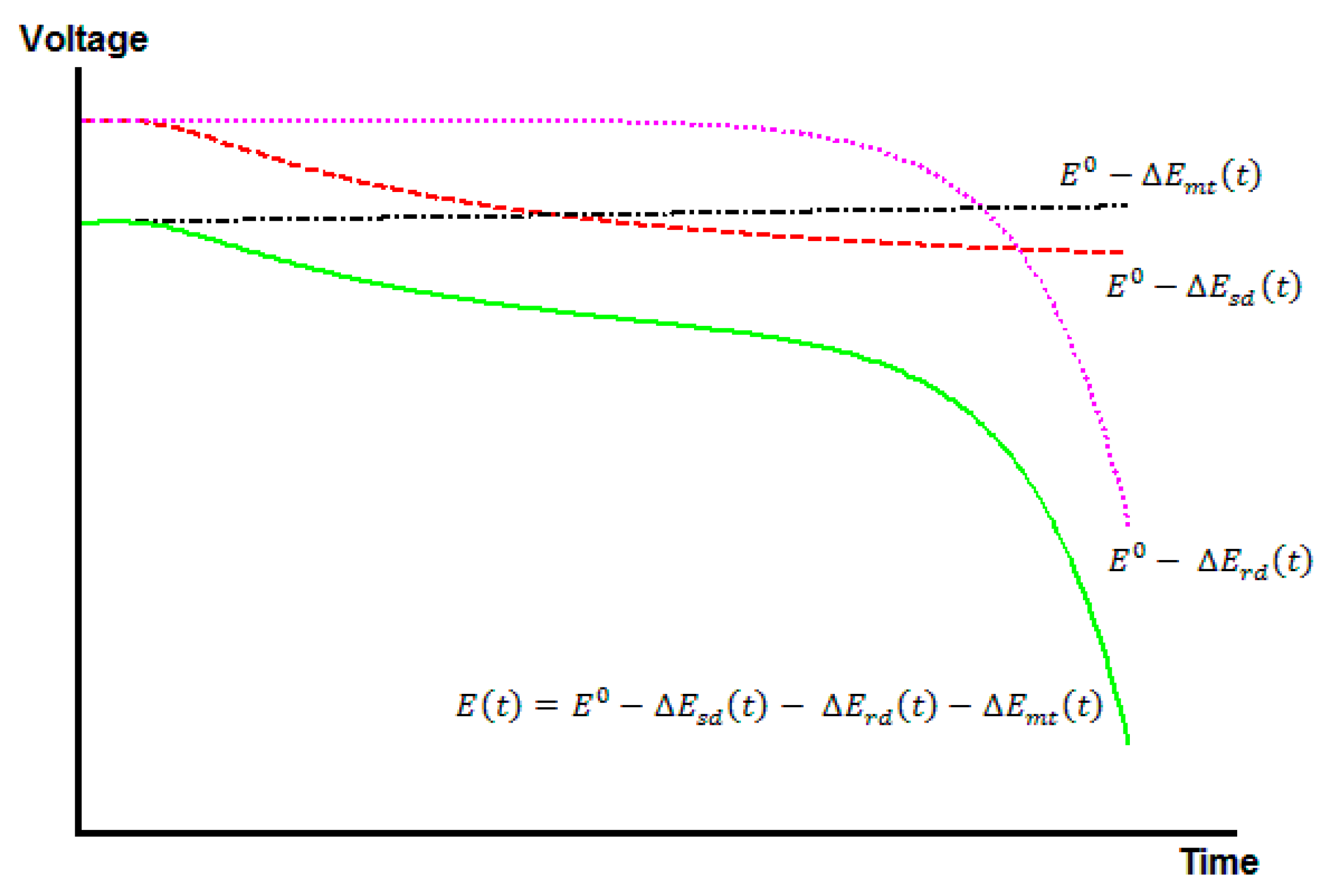
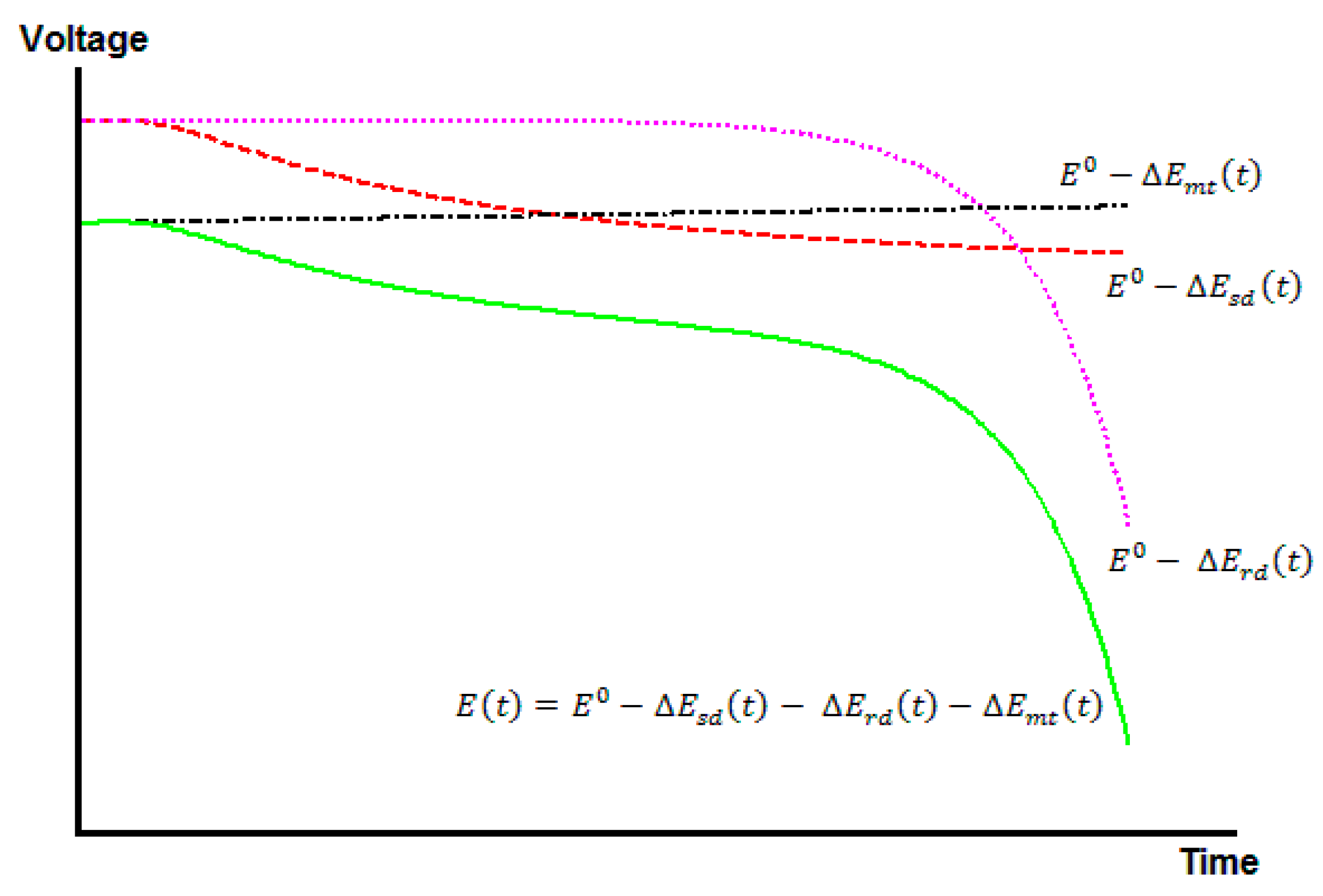
3.3. Battery Discharge Model
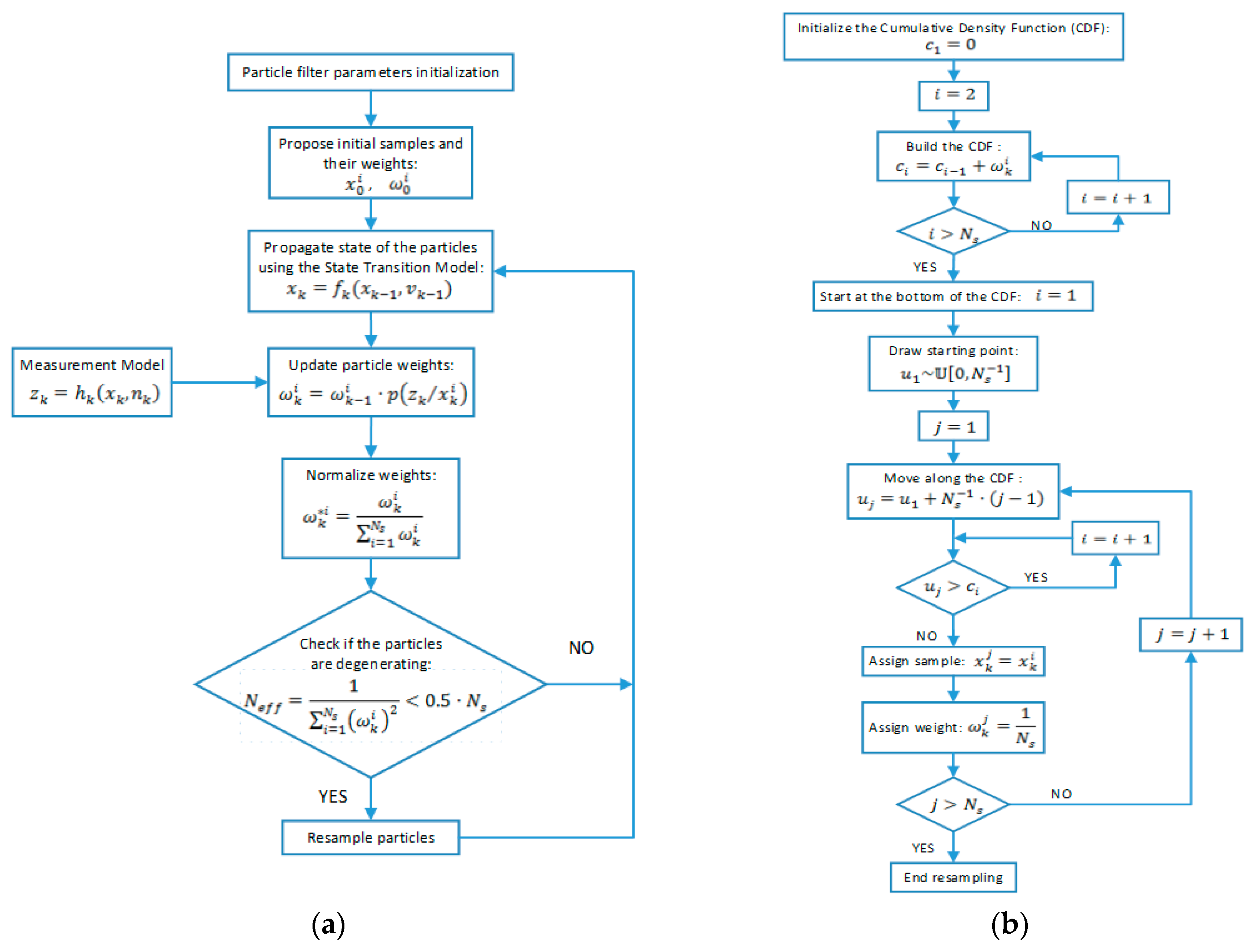
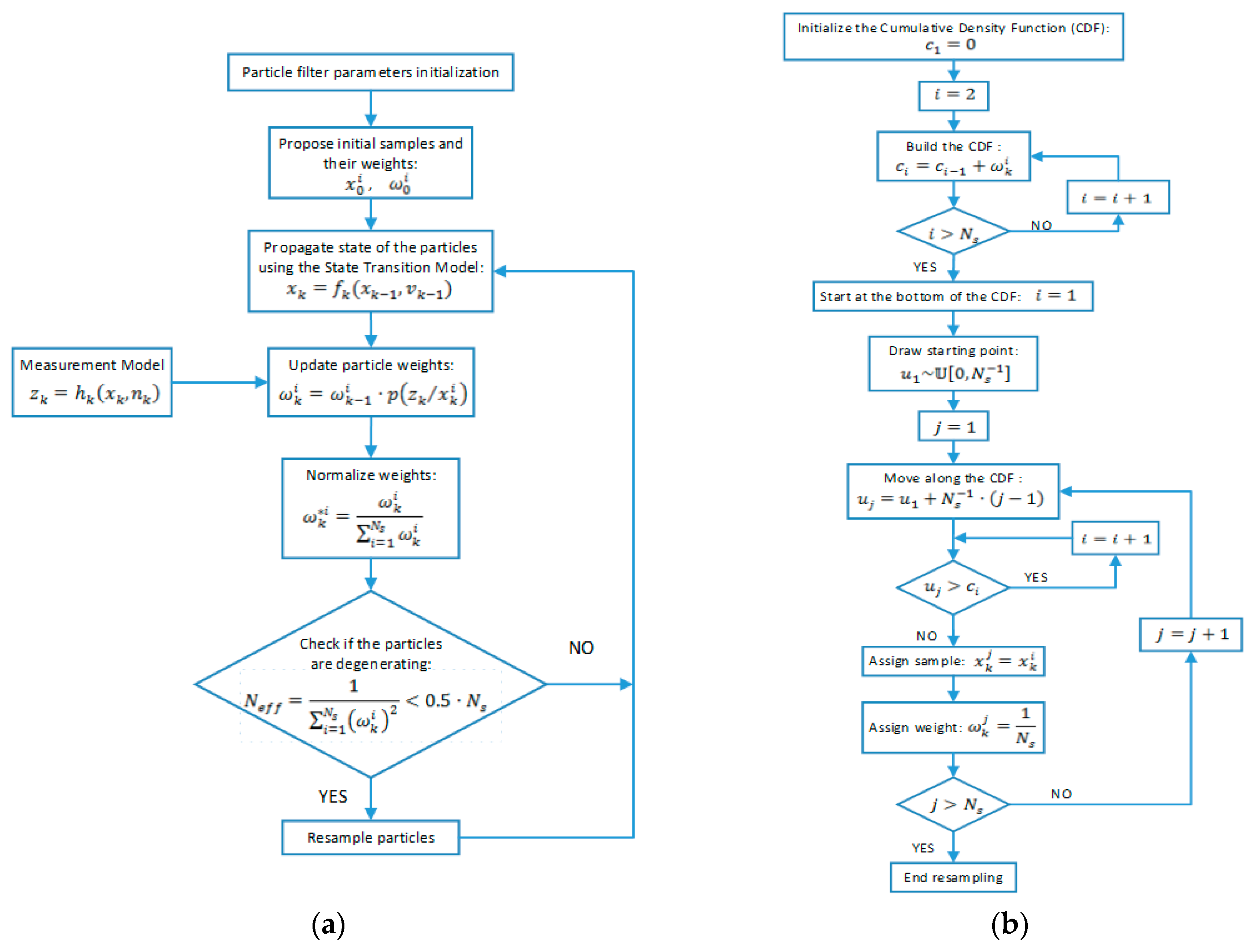
3.4. Particle Filter Framework
- Sequential importance sampling: when an importance density function is available, the weights can be updated using:
- When the importance density sampling function is chosen so that it reduces the variance of the weights:
- Occasionally, the importance density sampling function is chosen to be the PDF of the state based only on the previous state (). The weight update function is then:
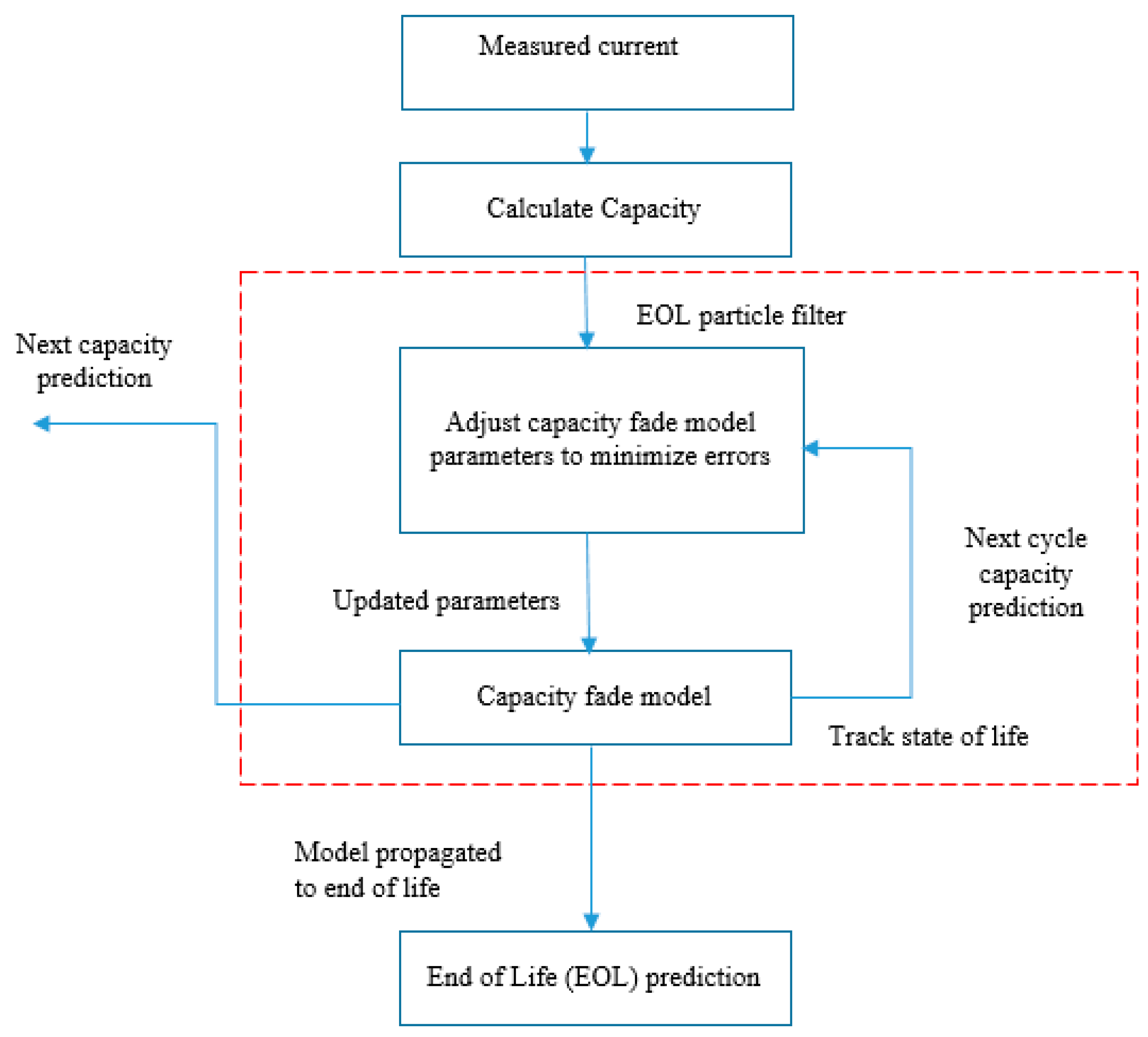
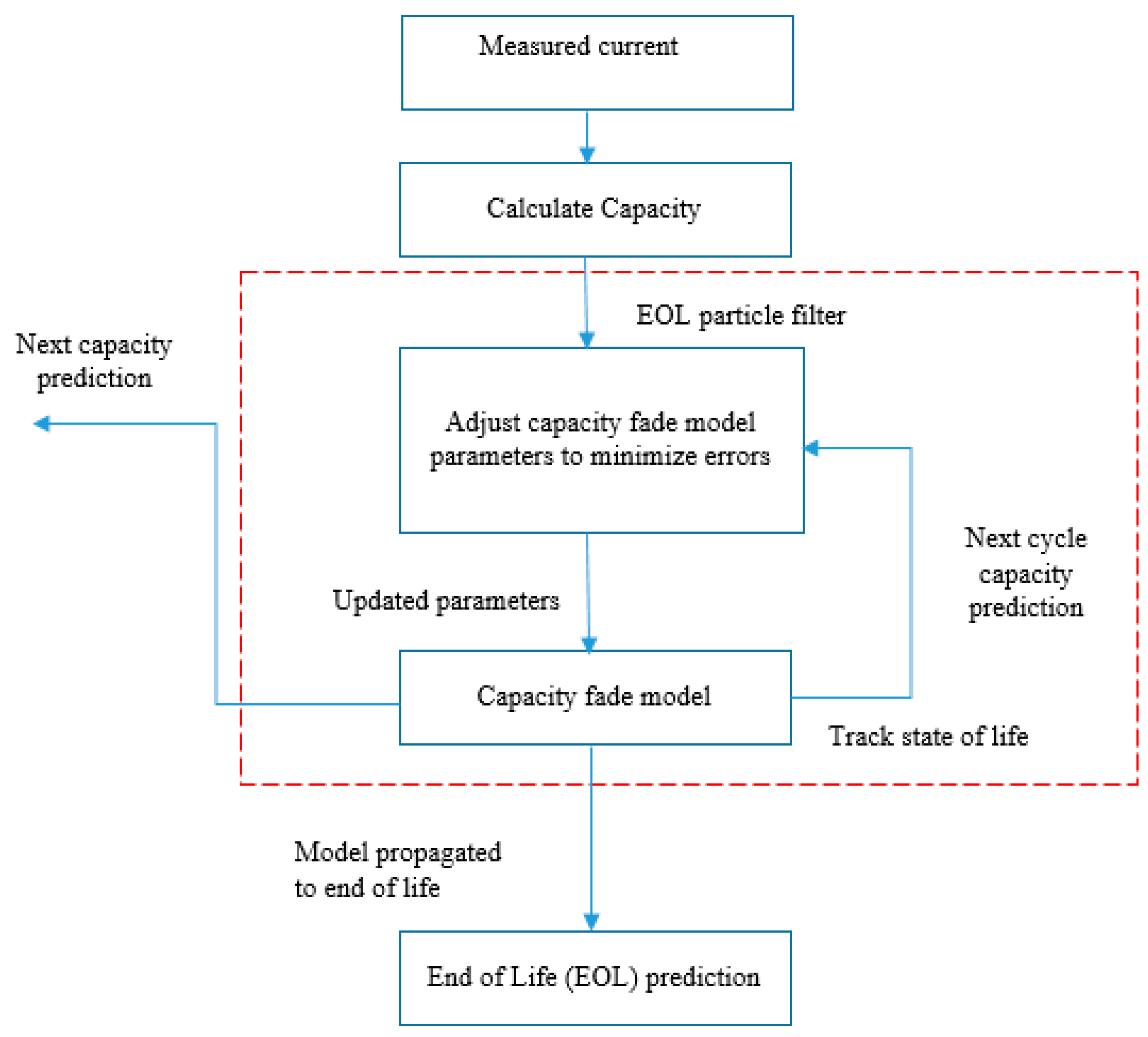
3.5. End of Life (EOL) Prediction Model
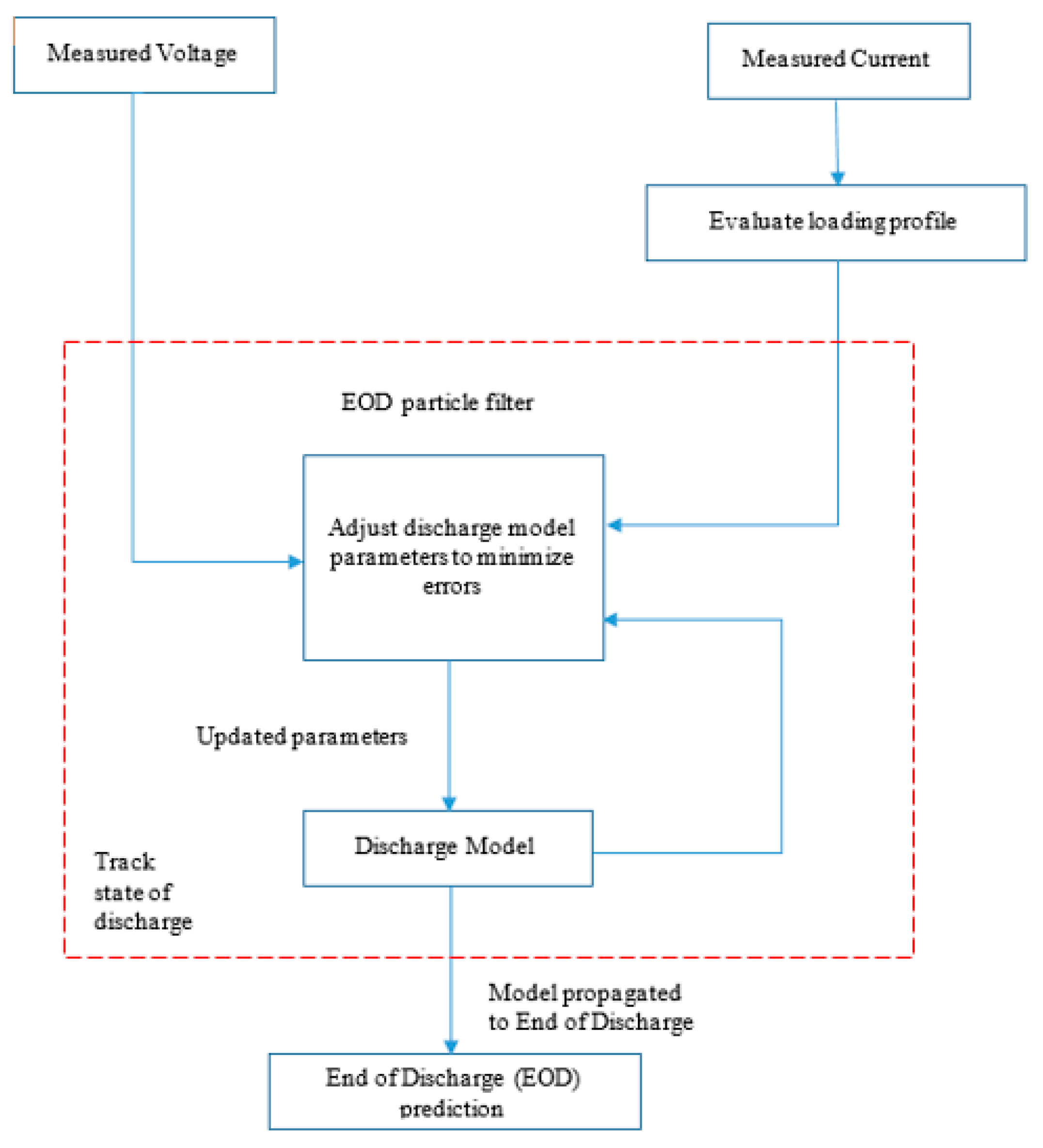
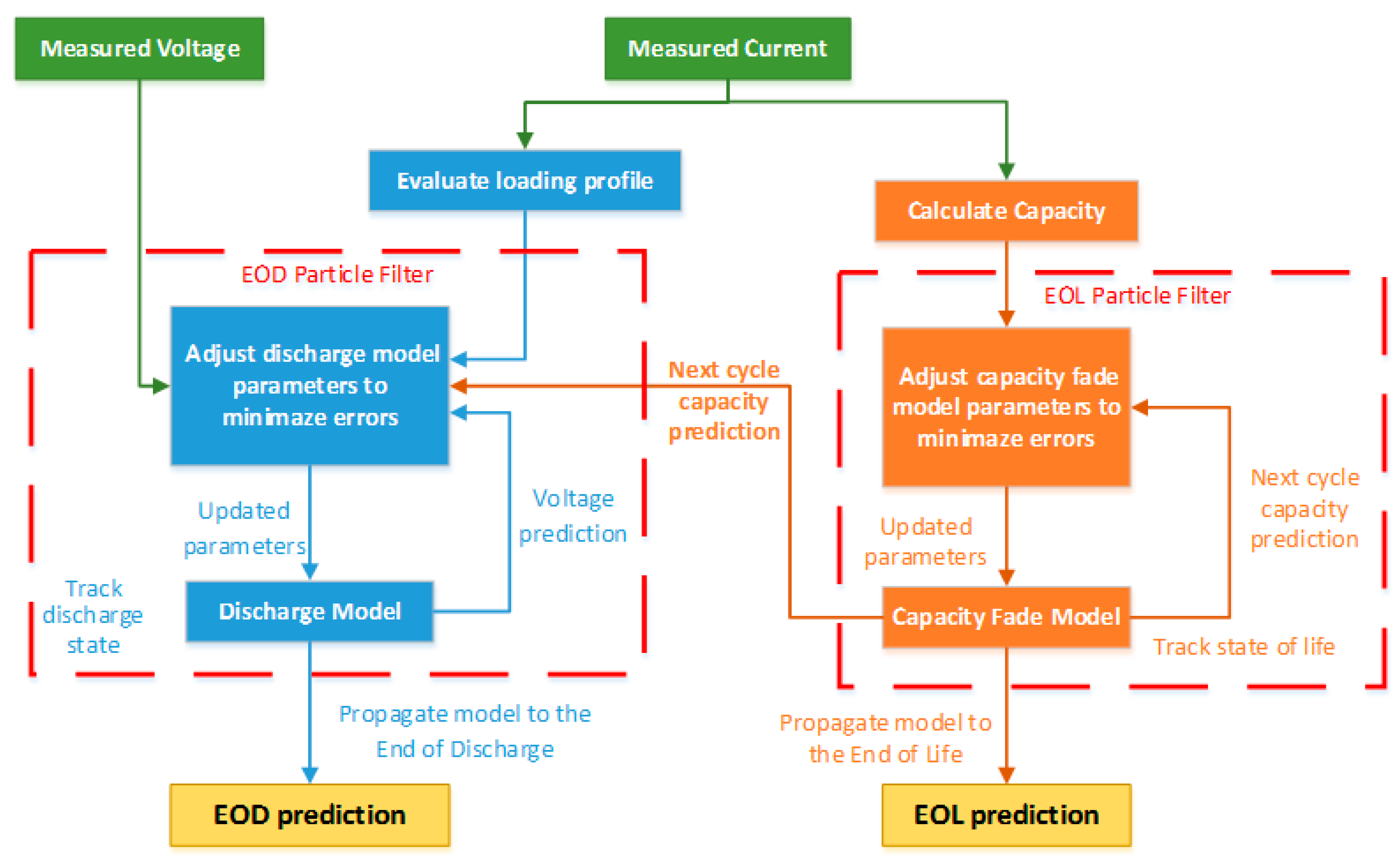
3.6. Enhanced End of Discharge (EOD) Prediction Model
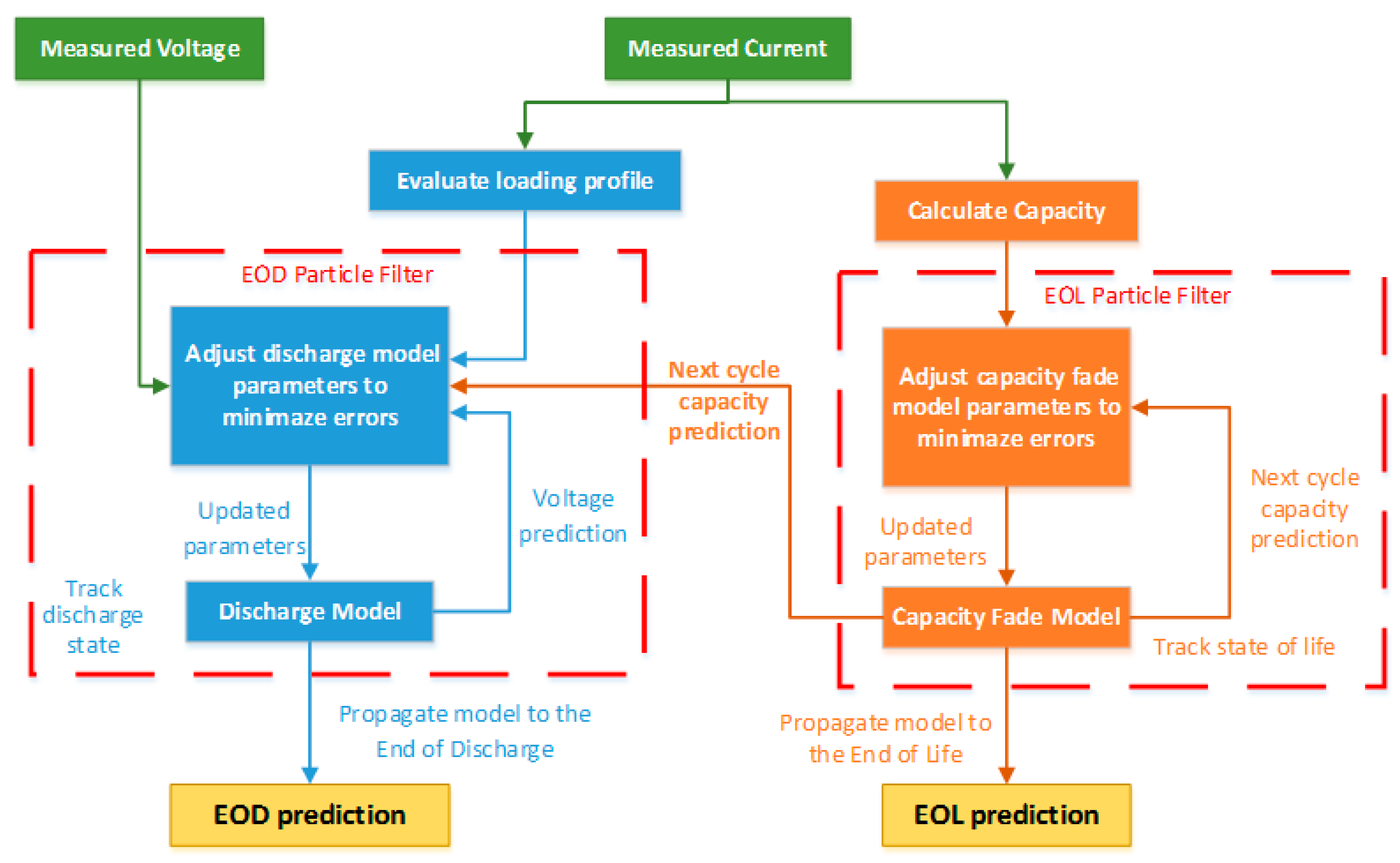
3.7. Diagnostic and Prognostic Framework
4. Simulation
Battery Specifications and Loading Conditions
5. Results and Discussion
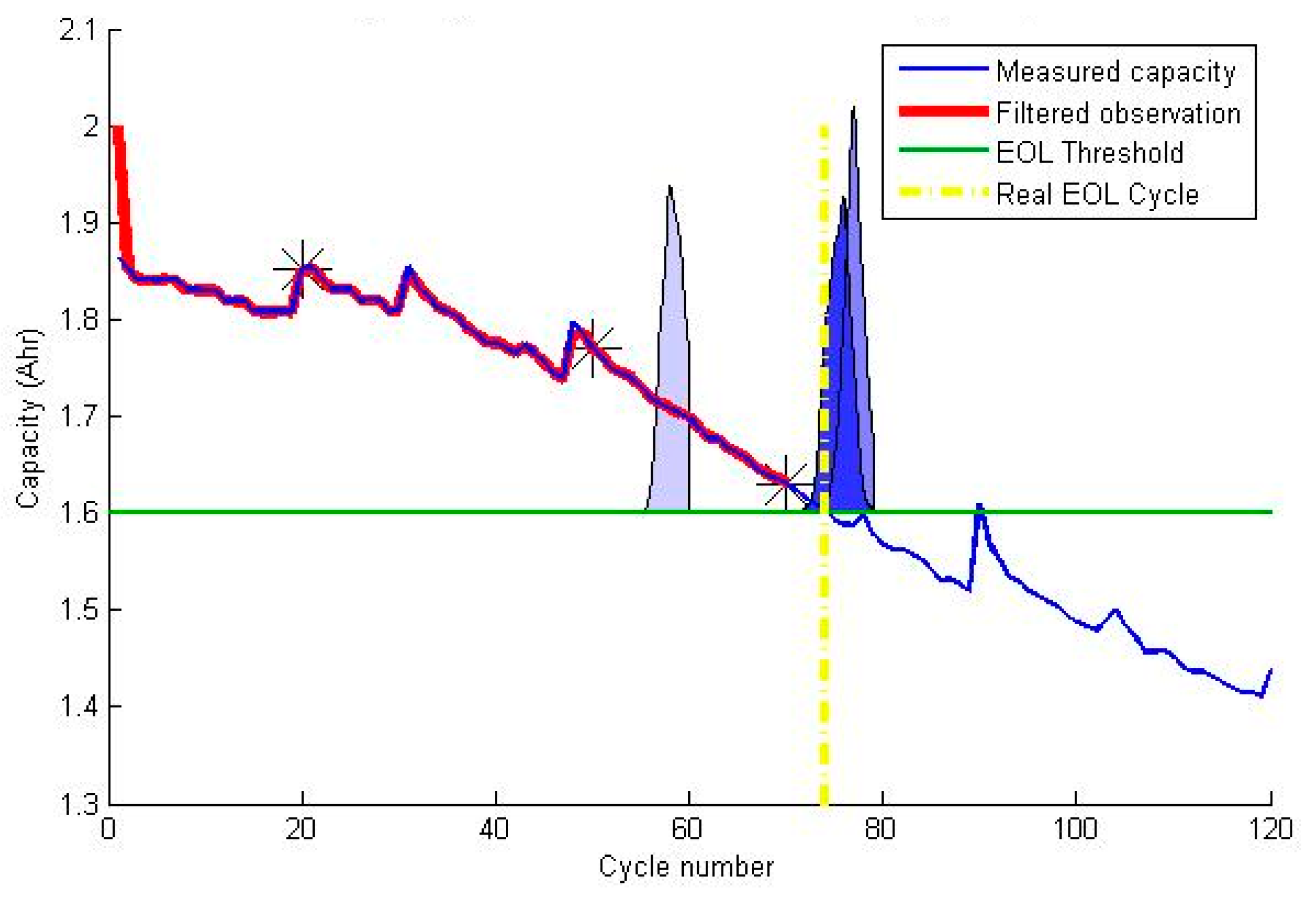
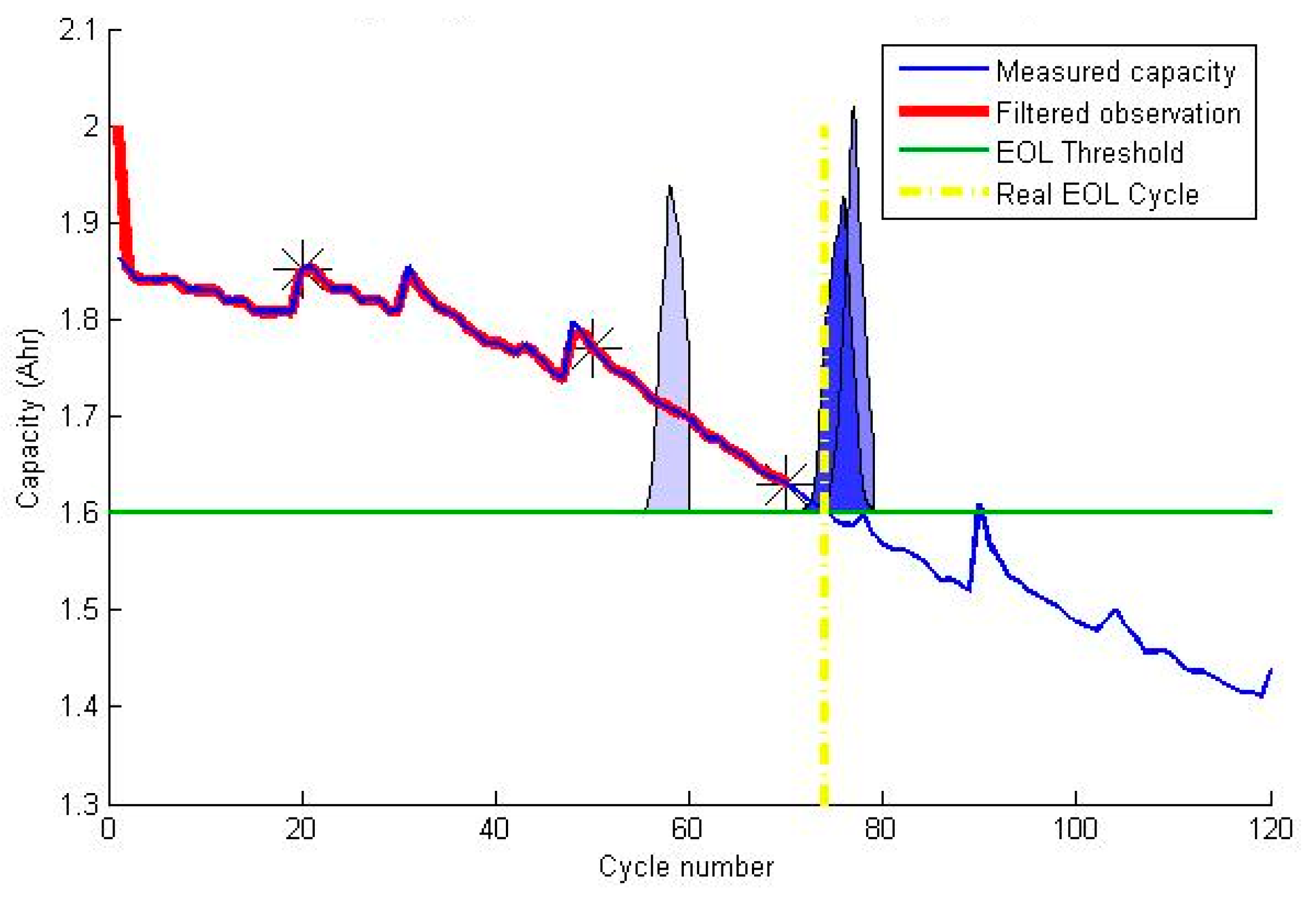
5.1. End of Life (EOL) Prediction
5.1.1. EOL Prediction (First Test)
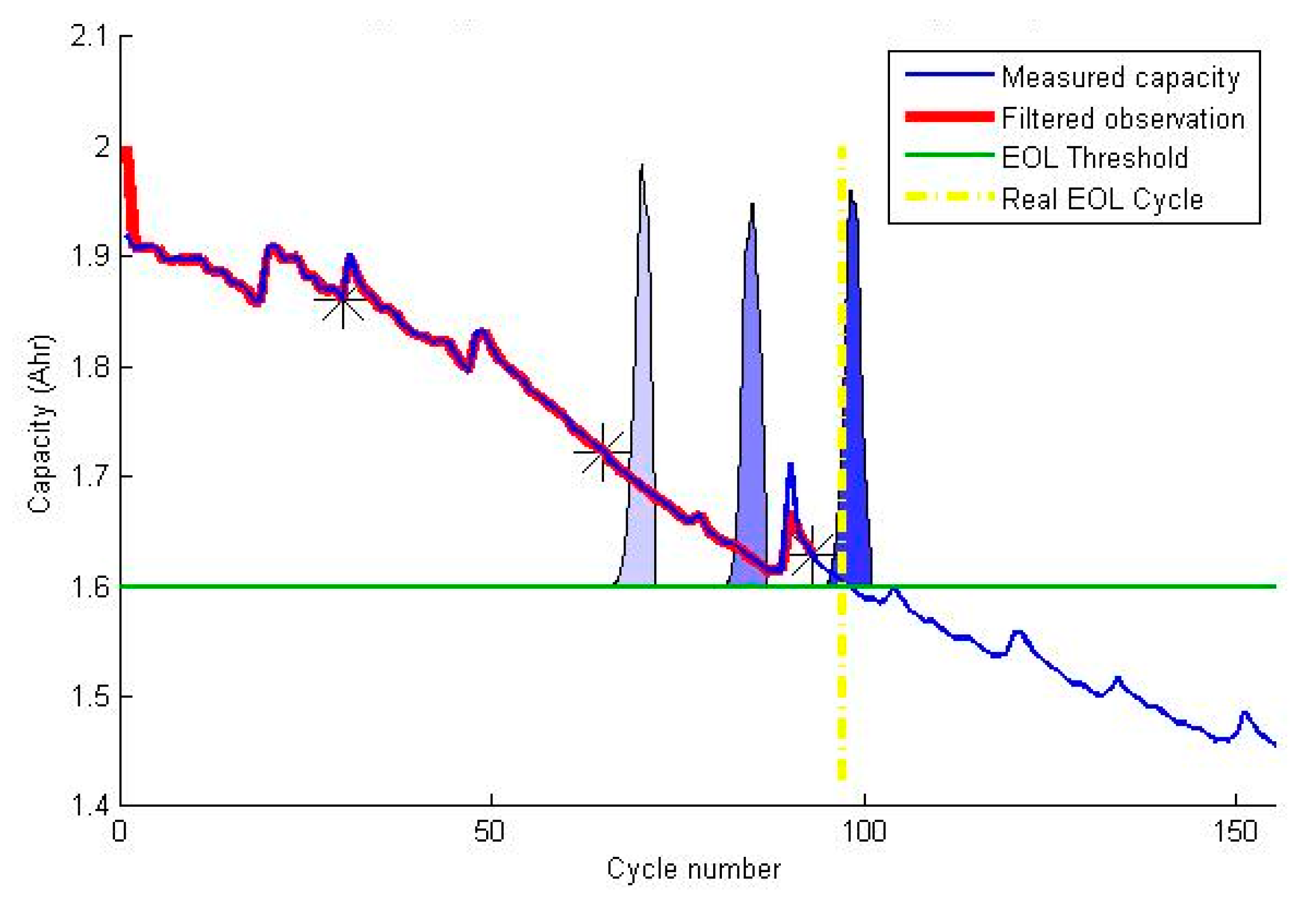
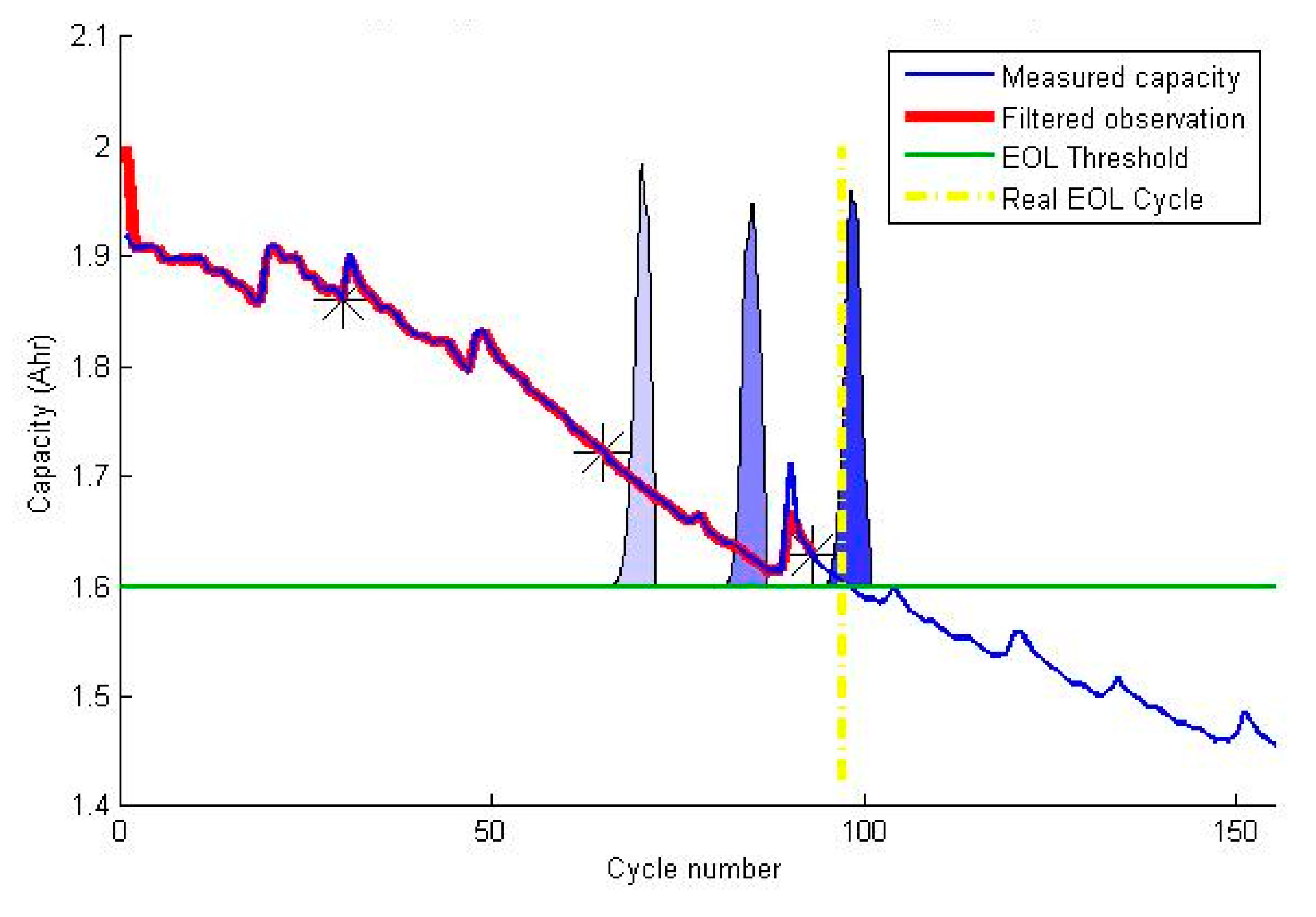
5.1.2. EOL Prediction (Second Test)
5.1.3. EOL Prediction (Third Test)
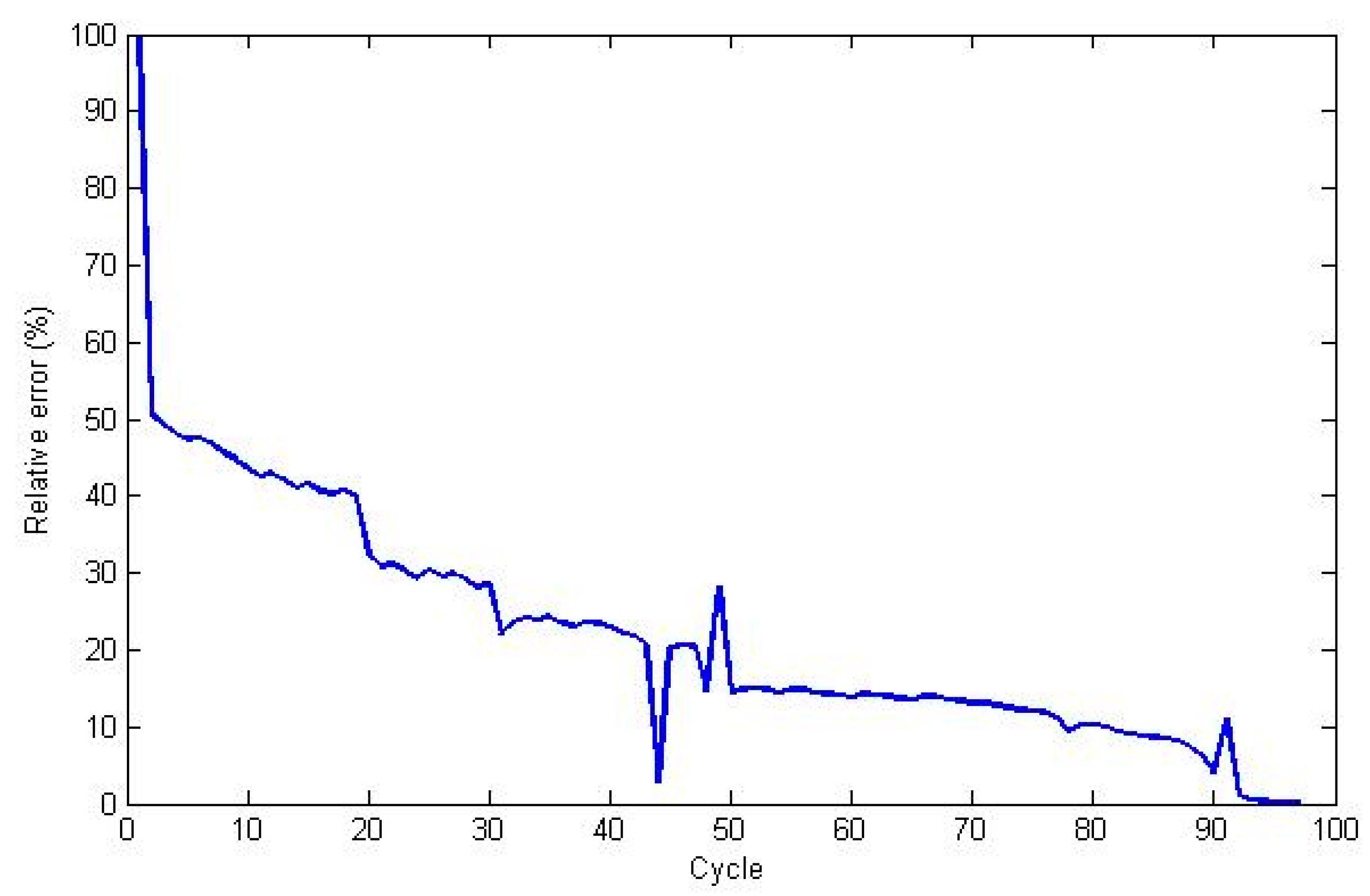
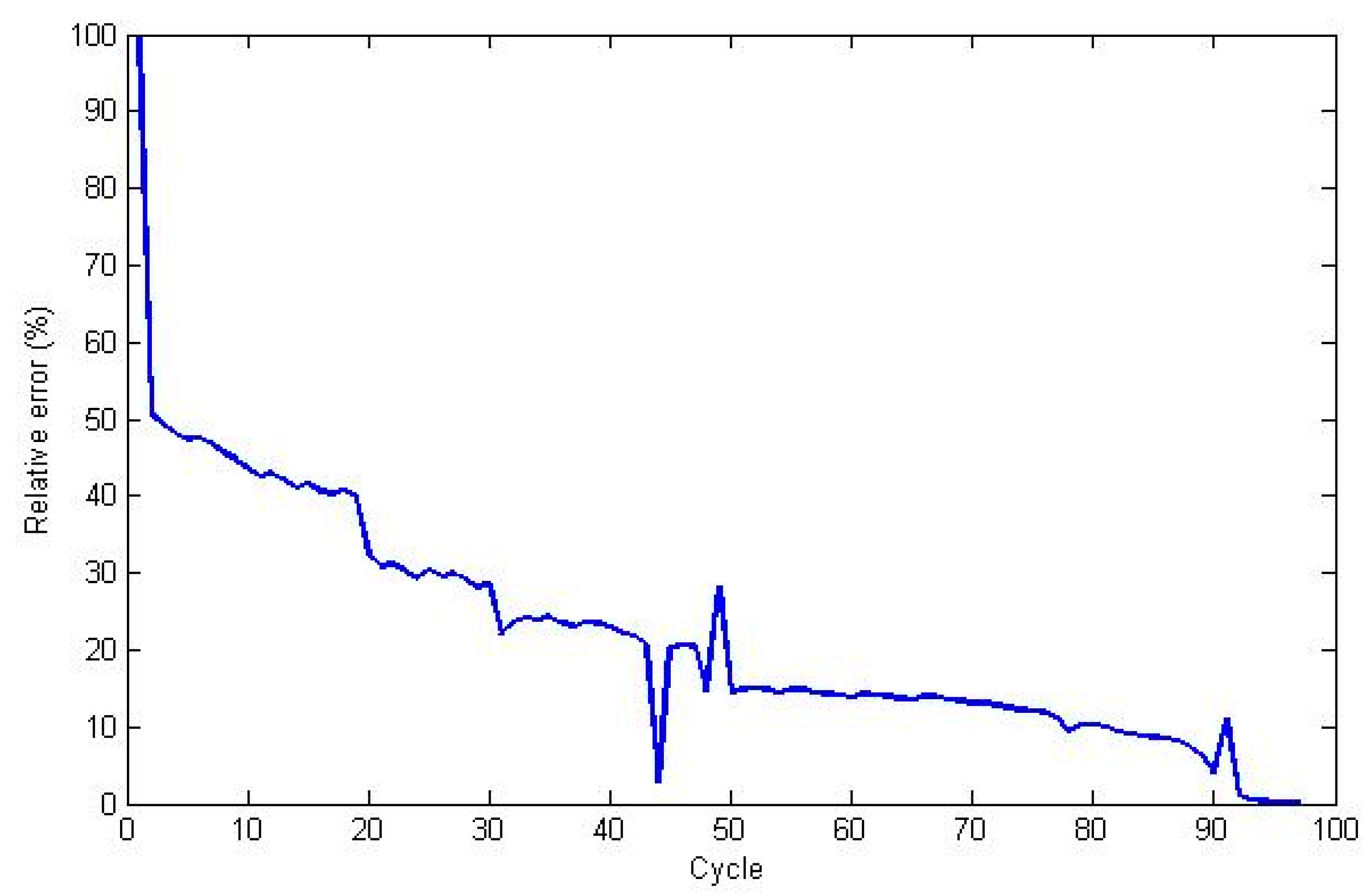
5.1.4. EOL Prediction Error
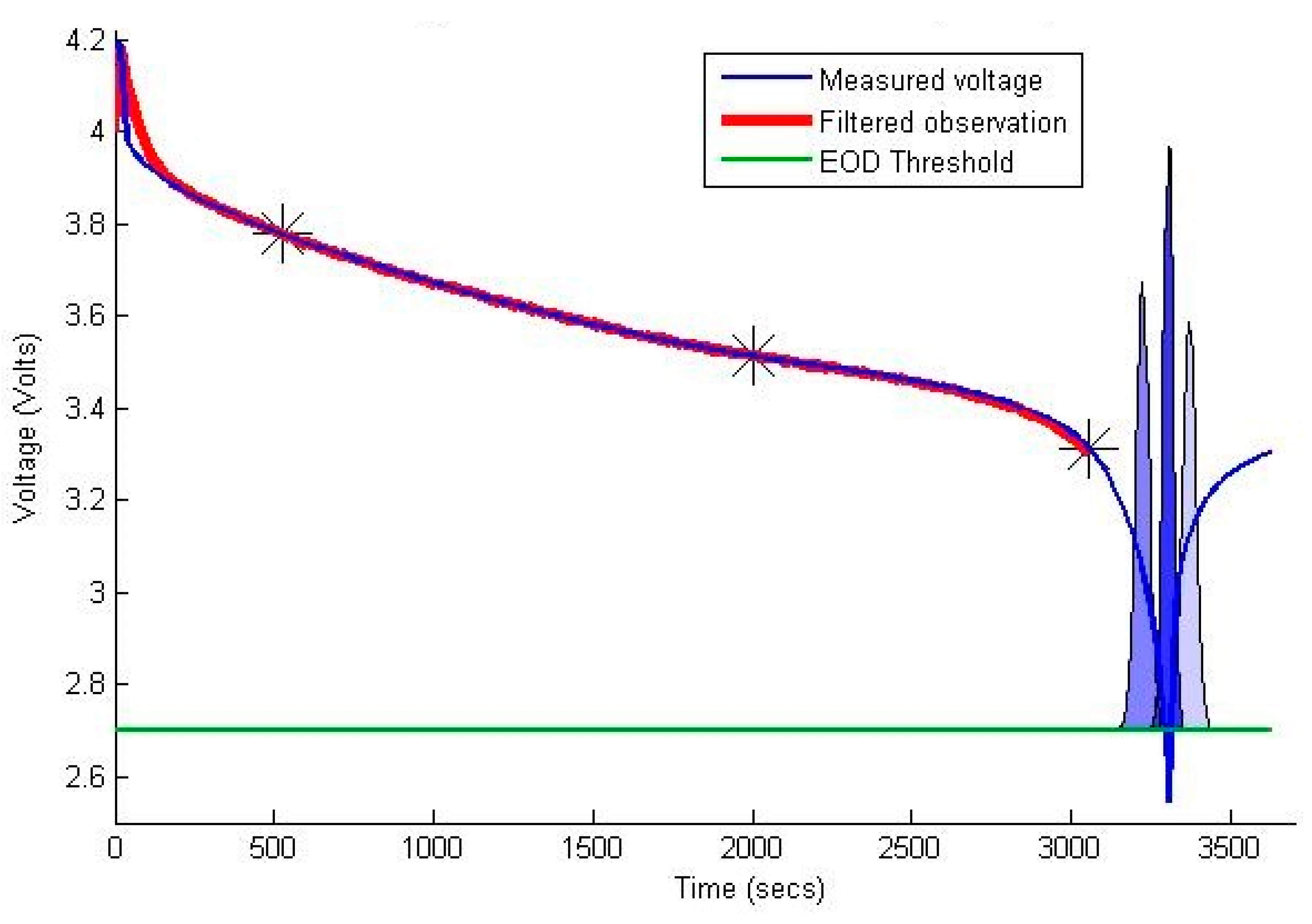
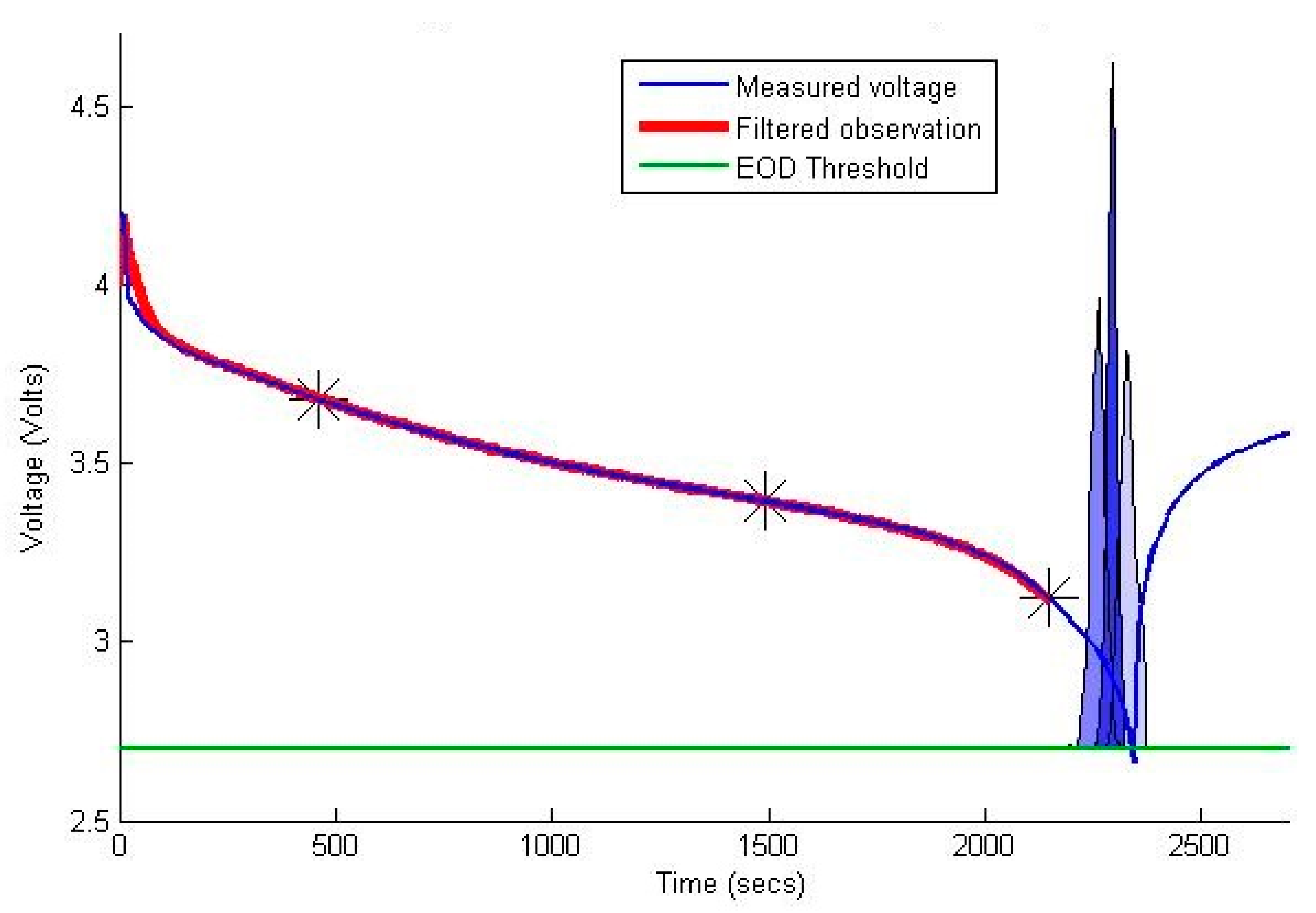
5.2. End of Discharge (EOD) Prediction
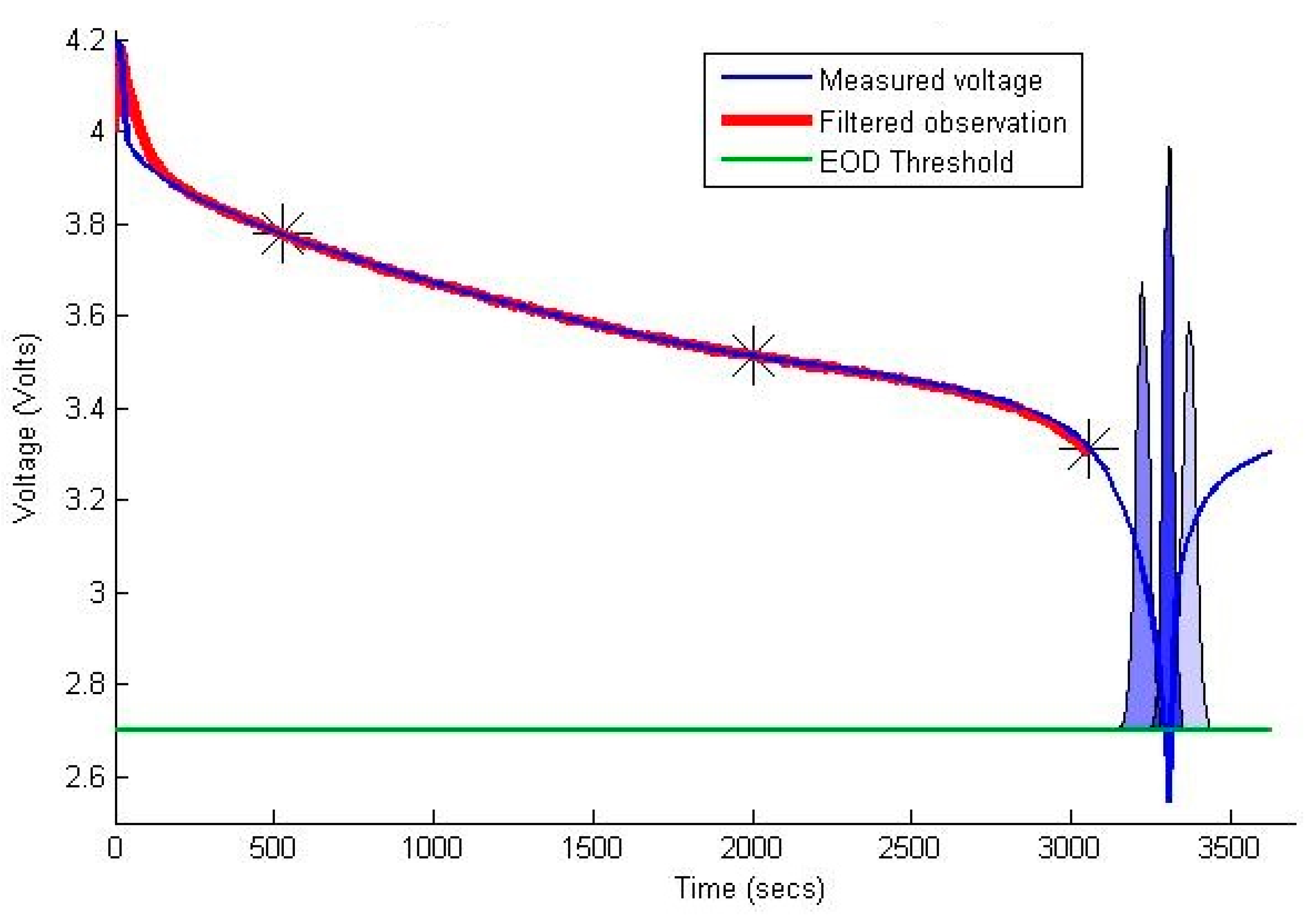
5.2.1. EOD Prediction (First Test)
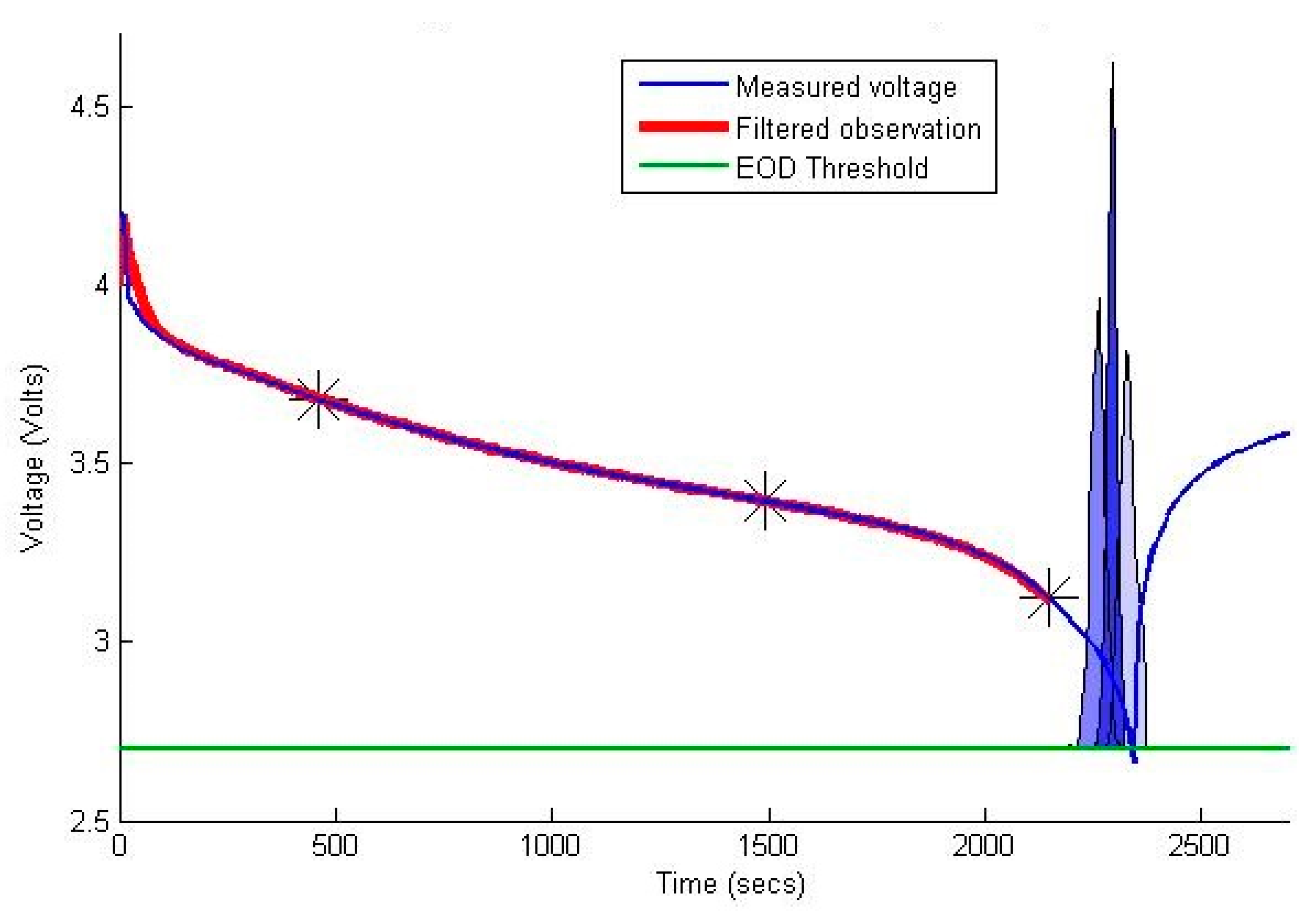
5.2.2. EOD Prediction (Second Test)
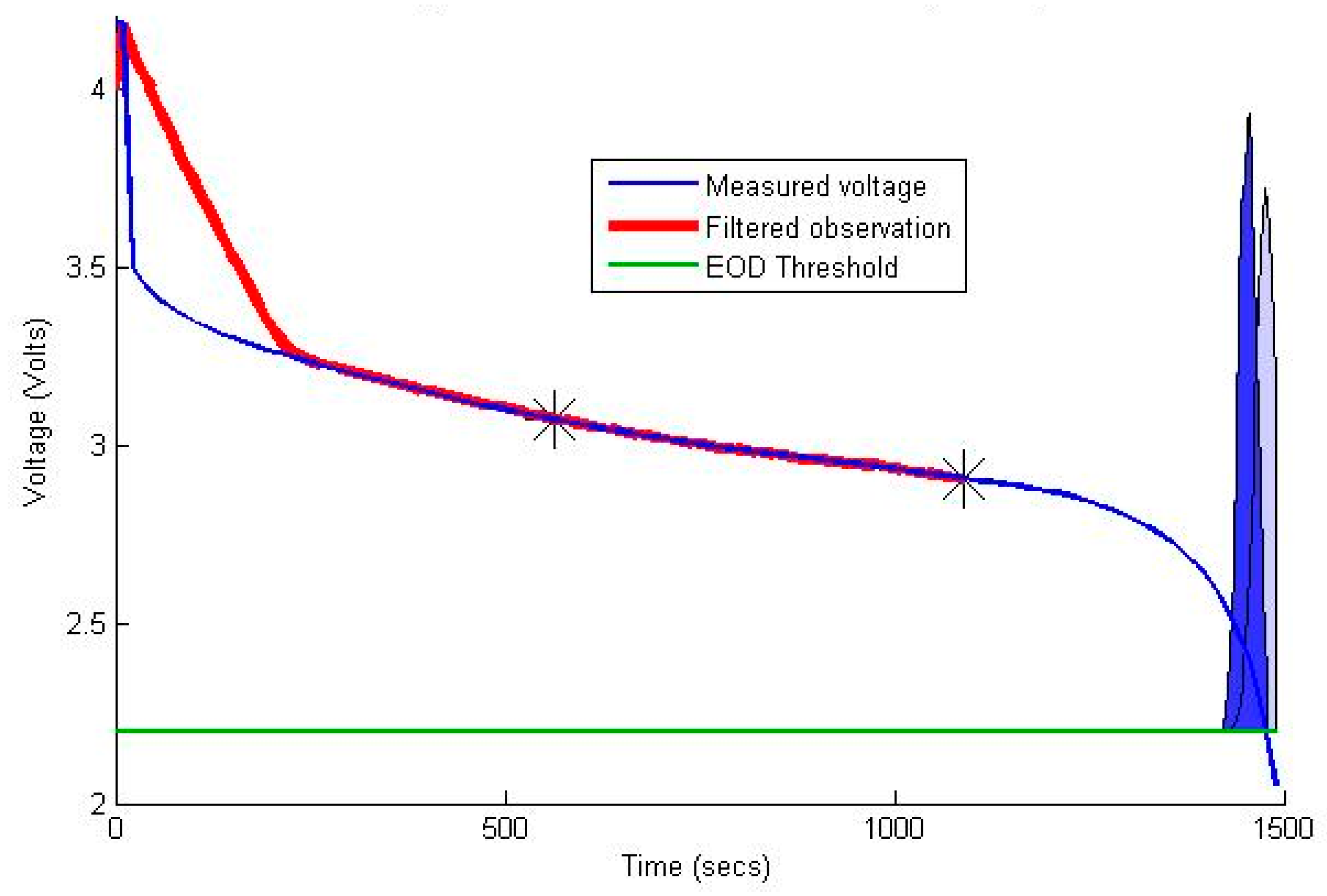
5.2.3. EOD Prediction (Third Test)
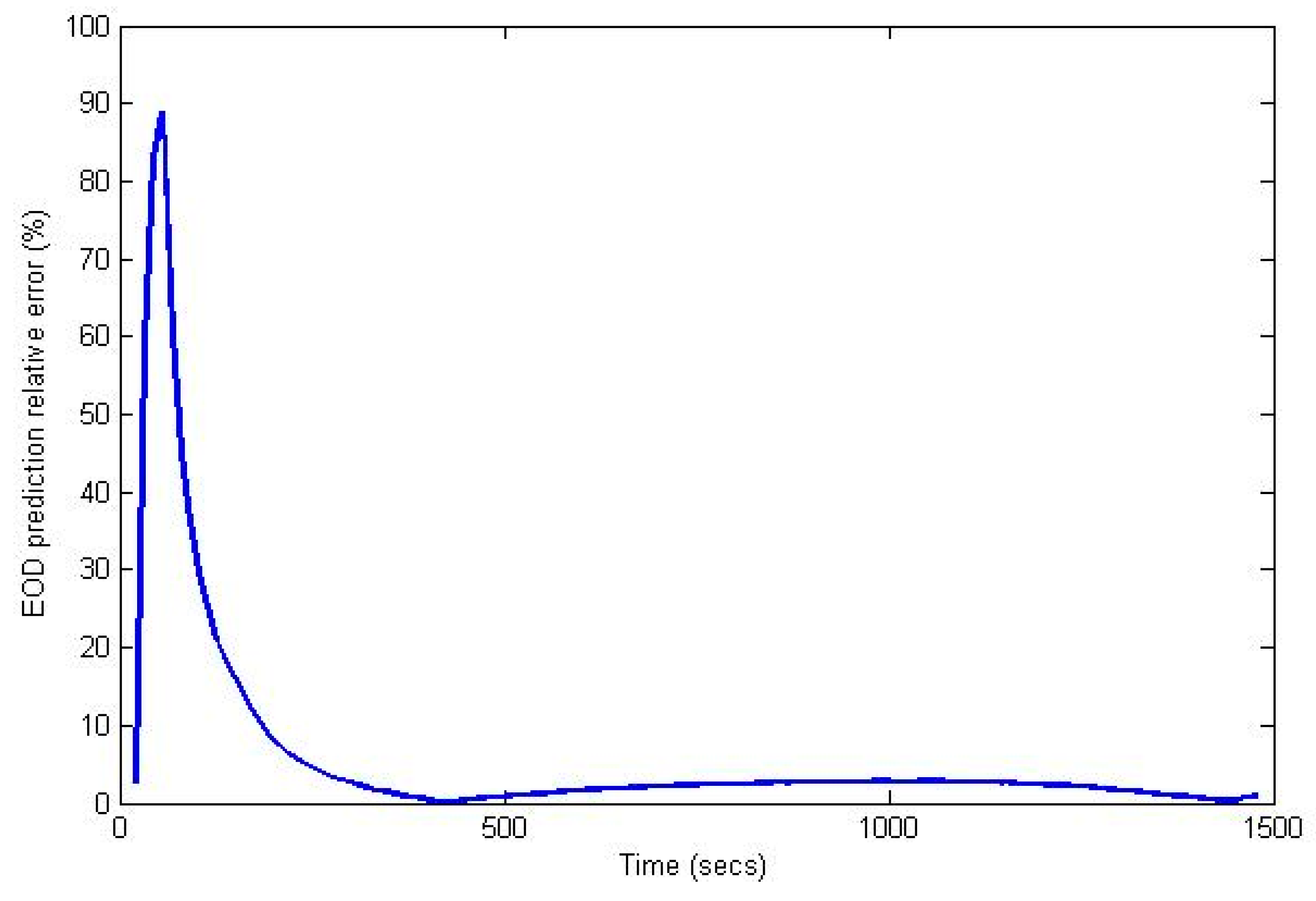
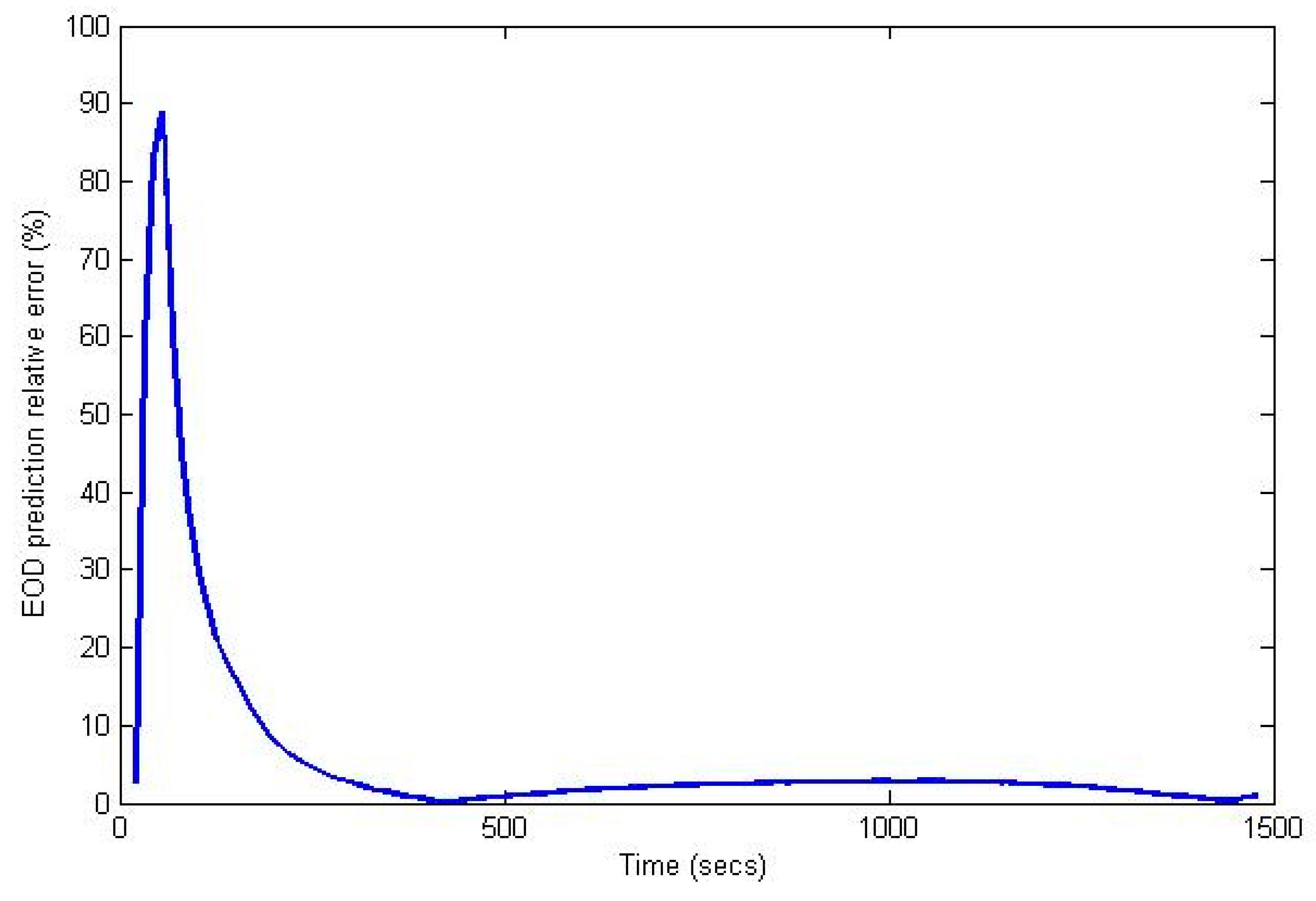
5.2.4. EOD Prediction Error
6. Conclusions
Supplementary Materials
Author Contributions
Conflicts of Interest
Nomenclature
| ηC | Coulombic efficiency factor |
| C0 | Initial capacitance |
| EOL | End of Life |
| EOD | End of Discharge |
| SOC | State of Charge |
| SVM | Support Vector Machine |
| PF | Particle Filter |
| Initial battery capacity | |
| Electrolyte resistance | |
| Charge transfer resistance | |
| Warburg impedance | |
| Voltage loss due to battery shelf discharge | |
| Voltage drop due to cell reactant depletion | |
| Voltage drop due to internal resistance to mass transfer | |
| Voltage drop at start of discharge cycle | |
| Sampling frequency |
References
- Walker, E.; Rayman, S.; White, E.R. Comparison of a particle filter and other state estimation methods for prognostics of lithium-ion batteries. J. Power Sources 2015, 287, 1–12. [Google Scholar] [CrossRef]
- Saha, B. NASA—Battery Prognostics; NASA: Washington, DC, USA, 2010. [Google Scholar]
- Xi, Z.; Jing, R.; Lee, C. Diagnostics and Prognostics of Lithium-ion Batteries. In Proceedings of the ASME 2015 International Design Engineering Technical Conferences and Computers and Information in Engineering, Boston, MA, USA, 2–5 August 2015. [Google Scholar]
- Jata, K.V.; Parthasarathy, T.A. Physics of Failure. In Proceedings of the 1st International Forum on Integrated System Health Engineering and Management in Aerospace, Napa, CA, USA, 7–10 November 2005. [Google Scholar]
- Pecht, M. Prognostics and Health Management of Electronics; Wiley-Interscience: New York, NY, USA, 2008. [Google Scholar]
- Xing, Y.; Ma, W.; Tsui, K. A Case Study on Battery Life Prediction Using Particle Filtering. In Proceedings of the 2012 Prognostics and System Health Management Conference, Beijing, China, 23–25 May 2012. [Google Scholar]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster-Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Pattipati, B.; Sankavaram, C.; Pattipati, K.R. System Identification and Estimation Framework for Pivotal Automotive Battery Management System Characteristics. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2011, 41, 869–884. [Google Scholar] [CrossRef]
- An, D.; Choi, N.H.; Kim, N.H. Prognostics 101: A tutorial for particle filter-based prognostics algorithm using Matlab. Reliab. Eng. Syst. Saf. 2013, 115, 161–169. [Google Scholar] [CrossRef]
- Gu, J.; Barker, D.; Pecht, M. Prognostics implementation of electronics under vibration loading. Microelectron. Reliab. 2007, 47, 1849–1856. [Google Scholar]
- Pecht, M.; Dasgupta, A. Physics-of-failure: An approach to reliable product development. J. Inst. Environ. Sci. 1995, 38, 30–34. [Google Scholar]
- Ye, M.; Guo, H.; Xiong, R.; Mu, H. An online model-based battery parameter and state estimation method using multi-scale dual adaptive particle filters. Energy Procedia 2017, 105, 4549–4554. [Google Scholar] [CrossRef]
- Doucet, A.; Godsill, S.; Andrieu, C. On sequential Monte Carlo sampling methods for Bayesian filtering. Stat. Comput. 2000, 10, 197–208. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K. Modelling Li-ion Battery Capacity Depletion in a Particle Filtering Framework. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, USA, 27 September–1 October 2009. [Google Scholar]
- Dalal, M.; Ma, J.; He, D. Lithium ion battery life prognostic health management system using particle filtering framework. Inst. Mech. Eng. Part O J. Risk Reliab. 2011, 225, 81–90. [Google Scholar] [CrossRef]
- Daigle, M.; Saha, B.; Goebel, K. A Comparison of Filter-Based Approaches for Model-Based Prognostics. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–10. [Google Scholar]
- Wang, S.; Zhao, L.; Su, X.; Ma, P. Prognostics of Lithium-Ion batteries based on battery performance analysis and flexible support vector regression. Energies 2014, 7, 6492–6508. [Google Scholar] [CrossRef]
- Tang, S.; Yu, C.; Wang, X.; Guo, X.; Si, X. Remaining useful life prediction of lithium ion batteries based on the wiener process with measurement error. Energies 2014, 7, 520–547. [Google Scholar] [CrossRef]
- Qin, T.; Zeng, S.; Guo, J.; Skaf, Z. A rest time-based prognostic framework for state of health estimation of lithium-ion batteries with regeneration phenomena. Energies 2016, 9, 896. [Google Scholar] [CrossRef]
- Huang, Q.; Shen, Y.; Huang, Y.; Zhang, L.; Zhang, J. Impedance characteristics and diagnosis of automotive lithium-ion batteries at 7.5% to 93% state of charge. Electrochim. Acta 2016, 219, 751–765. [Google Scholar] [CrossRef]
- Sood, B.; Severn, L.; Osterman, M.; Pecht, M.; Bougaev, A.; McElfresh, D. Lithium-ion battery degradation mechanisms and failure analysis methodology. In Proceedings of the 38th International Symposium for Testing and Failure Analysis, Phoenix, AZ, USA, 11–15 November 2012. [Google Scholar]
- Mikolajczak, C.J.; Kahn, M.; White, K.; Long, R.T. Fire Protection Research Foundation. In Lithium-Ion Batteries Hazard and Use Assessment; Springer: Boston, MA, USA, 2011. [Google Scholar]
- Barsukov, Y. Battery Cell Balancing: What to Balance and How; Texas Instruments: Dallas, TX, USA, 2005. [Google Scholar]
- Kularatna, N. Modern batteries and their management—Part 1. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010. [Google Scholar]
- Saha, B.; Koshimoto, E.; Quach, C.C.; Hogge, E.F.; Strom, T.H.; Hill, B.L.; Vazquez, S.L.; Goebel, K. Battery health management system for electric UAVs. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; pp. 1–9. [Google Scholar]
- Ramadass, P.; Haran, B.; White, R.; Popov, B.N. Capacity fade of Sony 18650 cells cycled at elevated temperatures: Part I. Cycling performance. J. Power Sources 2002, 112, 606–613. [Google Scholar] [CrossRef]
- Hsiao, K.; de Plinval-Salgues, H.; Miller, J. Particle Filters and Their Applications. In Cognitive Robotics Lecture Notes; Massachusetts Institute of Technology (MIT): Cambridge, MA, USA, 2005. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Failure Mode | Level | Primary Causes | Symptoms | Comments | Parameter to Monitor |
|---|---|---|---|---|---|
| Shelf discharge | Cell | -High ambient temperatures both during usage and storage | -Loss of capacity -Increase in the cell internal impedance | -SOC -Temperature | |
| Thermal runaway | Cell | -Internal or external short circuit of a cell -High temperature operation (overheating) -Overcharging | -Cell heating during charging, especially near the end of charging -High voltage drop during rest periods -Charge capacity higher than discharge capacity | -The failure originates at cell level but it can propagate to the other cells composing the system. -The rate at which heat is produced in the system exceeds the rate at which it can be dissipated. | -Temperature -Cell Voltage -SOC |
| Cell capacity imbalance | Module/System | -Different behaviour of cells within the same module | -Different cell voltages | -Occurs when the SOC of different cells in a battery pack deviates from each other | -Cell voltages -SOC |
| Capacity fade | Cell/Module/System | -Aging (time and use) -Cell over-discharge -Low temperature operation | -Capacity decreases with time -Increase in cell’s internal resistance | -Occurs with each charge–discharge cycle of the battery | -Temperature -SOC -Capacity |
| Power fade | Cell/Module/System | -Aging (cycle aging) | -High battery impedance | -Usually coupled to capacity fade | -Impedance |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arachchige, B.; Perinpanayagam, S.; Jaras, R. Enhanced Prognostic Model for Lithium Ion Batteries Based on Particle Filter State Transition Model Modification. Appl. Sci. 2017, 7, 1172. https://doi.org/10.3390/app7111172
Arachchige B, Perinpanayagam S, Jaras R. Enhanced Prognostic Model for Lithium Ion Batteries Based on Particle Filter State Transition Model Modification. Applied Sciences. 2017; 7(11):1172. https://doi.org/10.3390/app7111172
Chicago/Turabian StyleArachchige, Buddhi, Suresh Perinpanayagam, and Raul Jaras. 2017. "Enhanced Prognostic Model for Lithium Ion Batteries Based on Particle Filter State Transition Model Modification" Applied Sciences 7, no. 11: 1172. https://doi.org/10.3390/app7111172
APA StyleArachchige, B., Perinpanayagam, S., & Jaras, R. (2017). Enhanced Prognostic Model for Lithium Ion Batteries Based on Particle Filter State Transition Model Modification. Applied Sciences, 7(11), 1172. https://doi.org/10.3390/app7111172