Controllable Micro-Particle Rotation and Transportation Using Sound Field Synthesis Technique


Abstract
:1. Introduction
2. Method
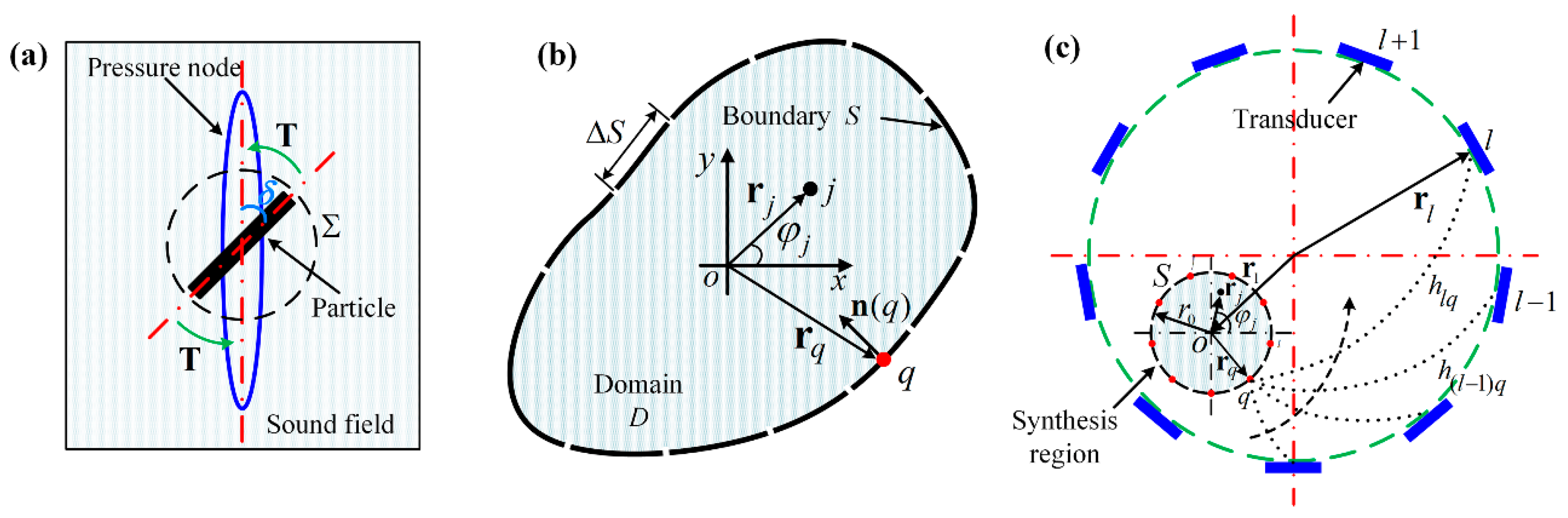
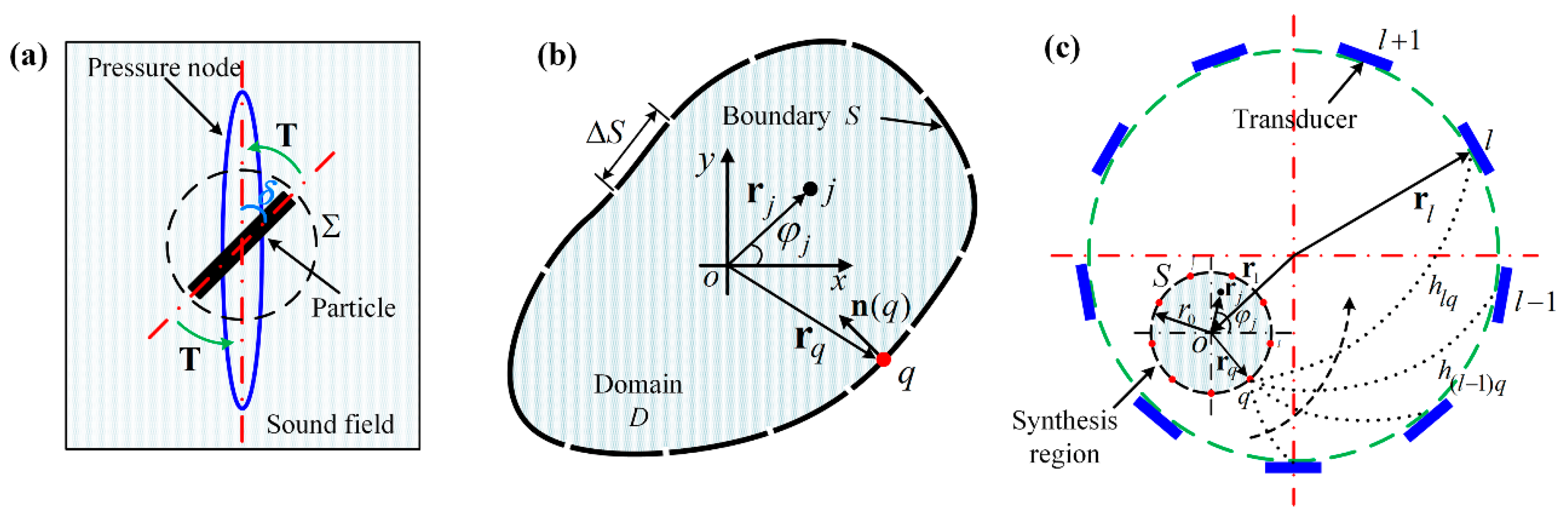
2.1. Mechanical Effects on Microparticles in a Sound Field
2.2. Synthesizing the Required Pressure Field by Finite Control Points
2.3. Acoustic Source Excitation
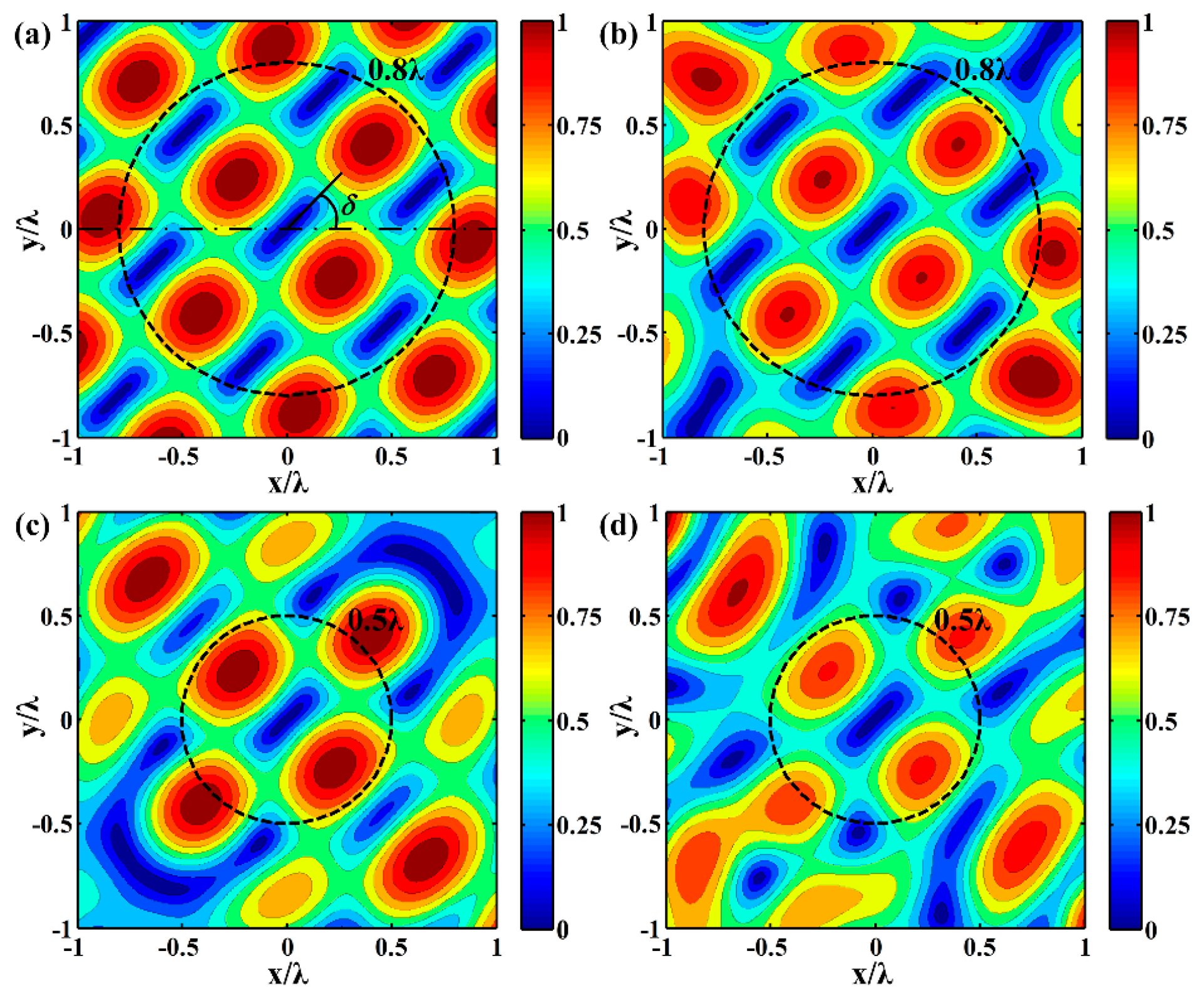
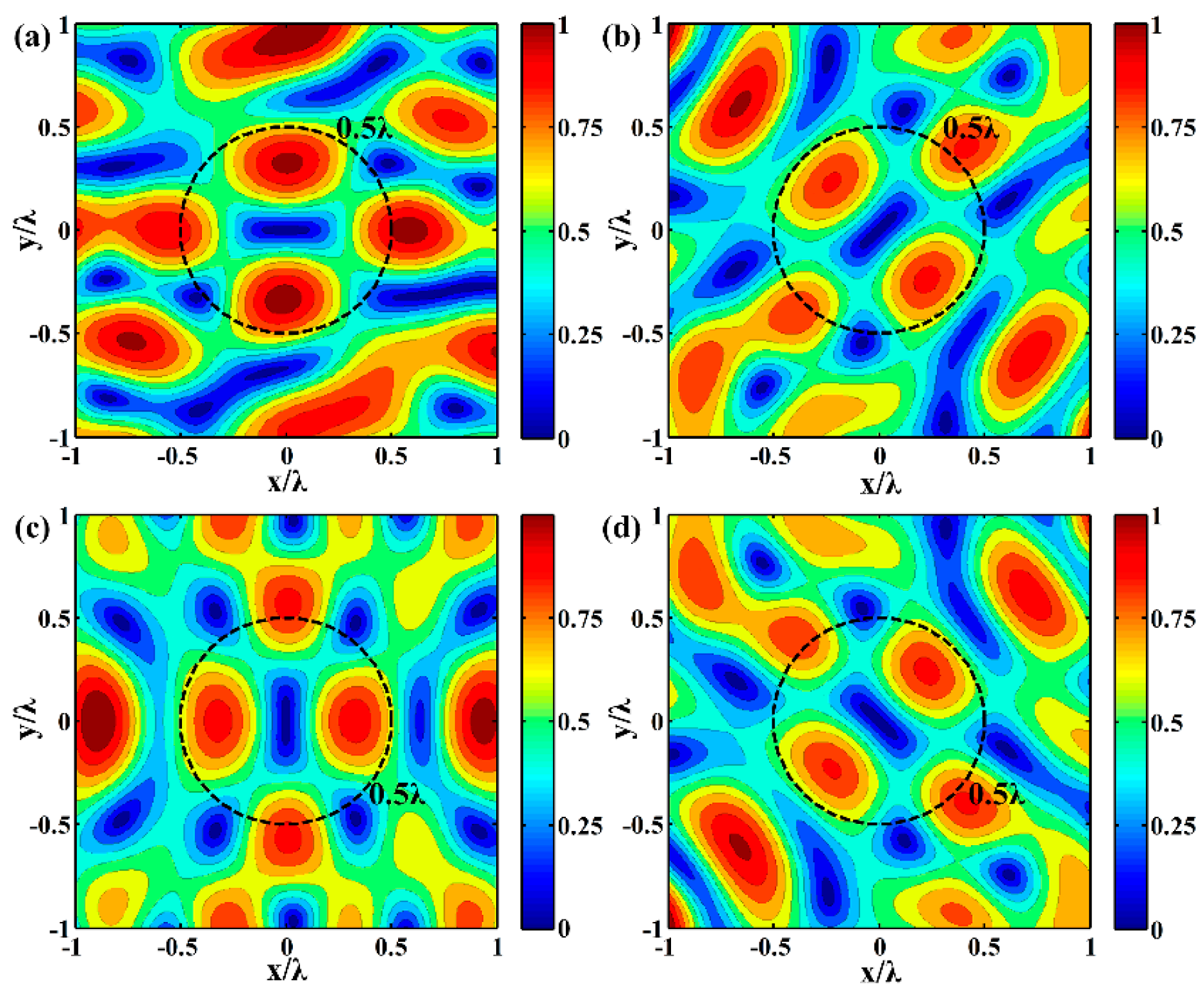
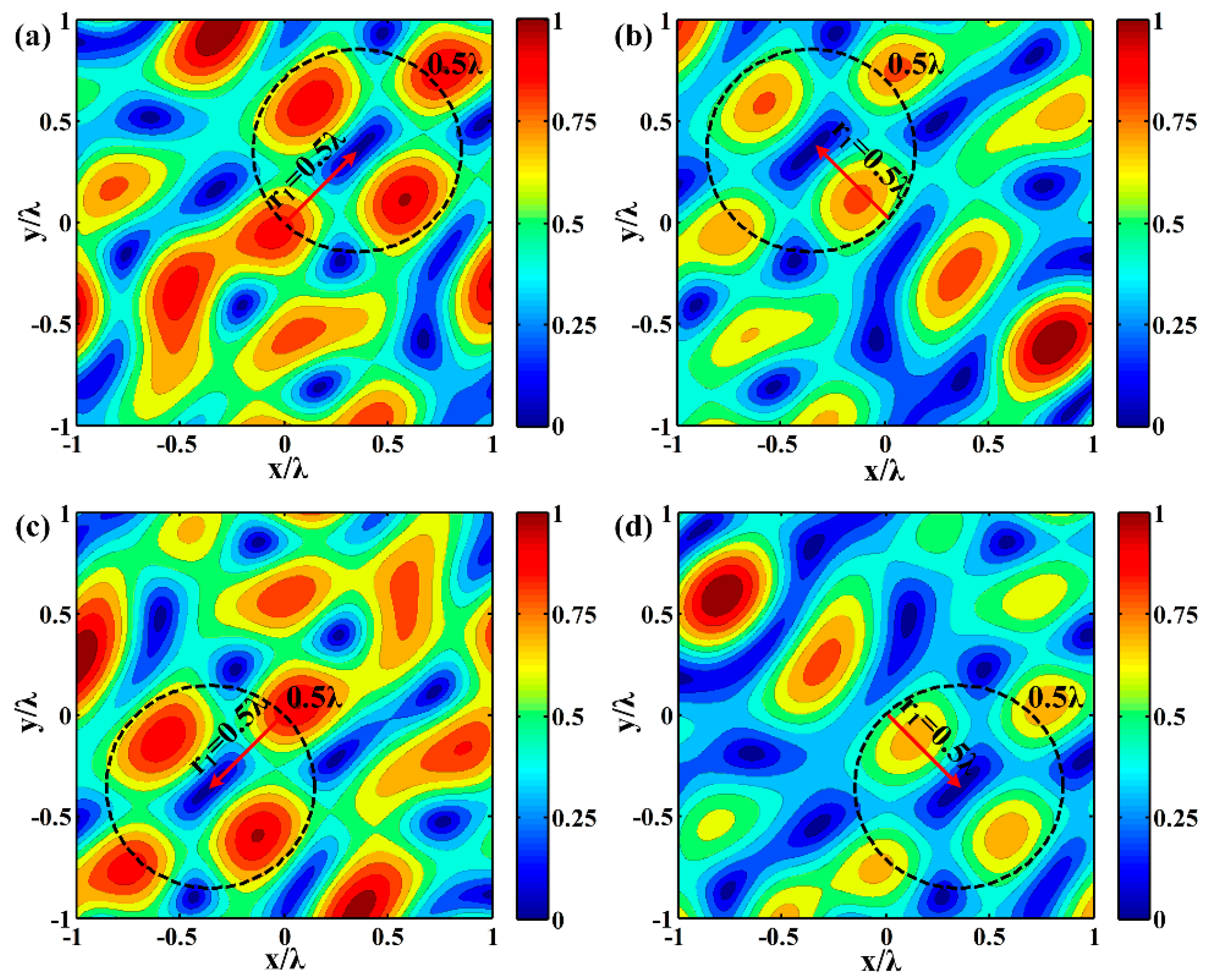
2.4. Field Transformation for Particle Rotation and Transportation
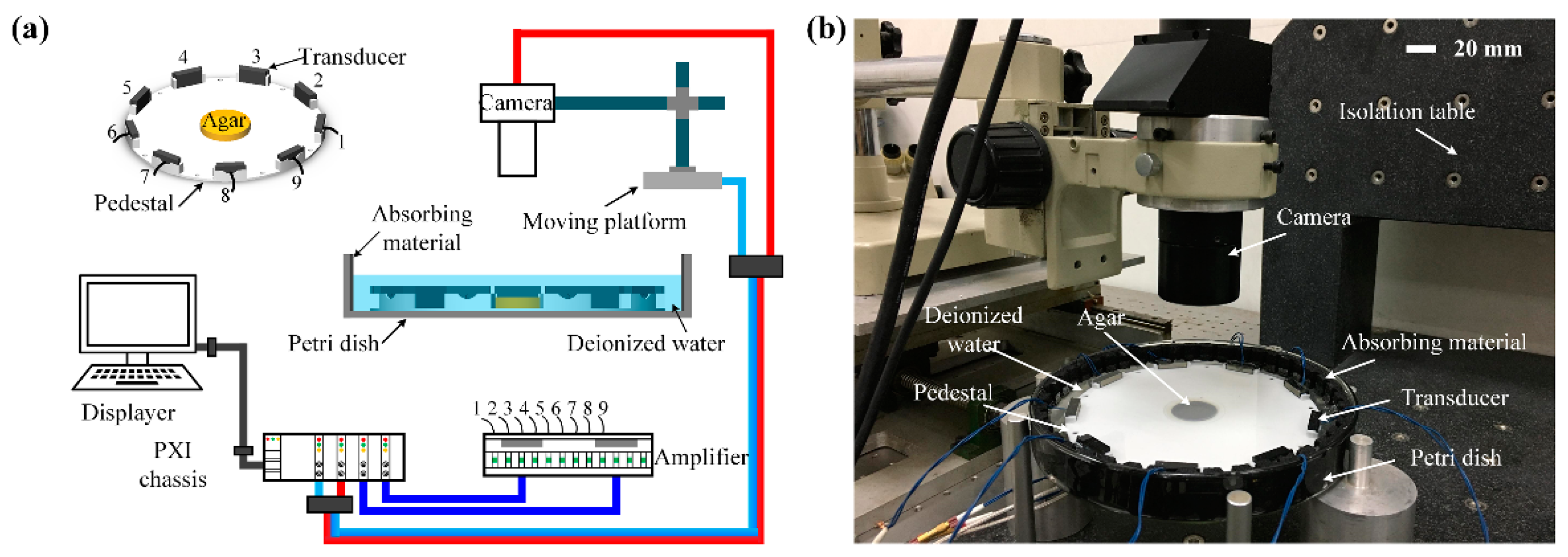
3. Experimental Setup
4. Results and Discussions
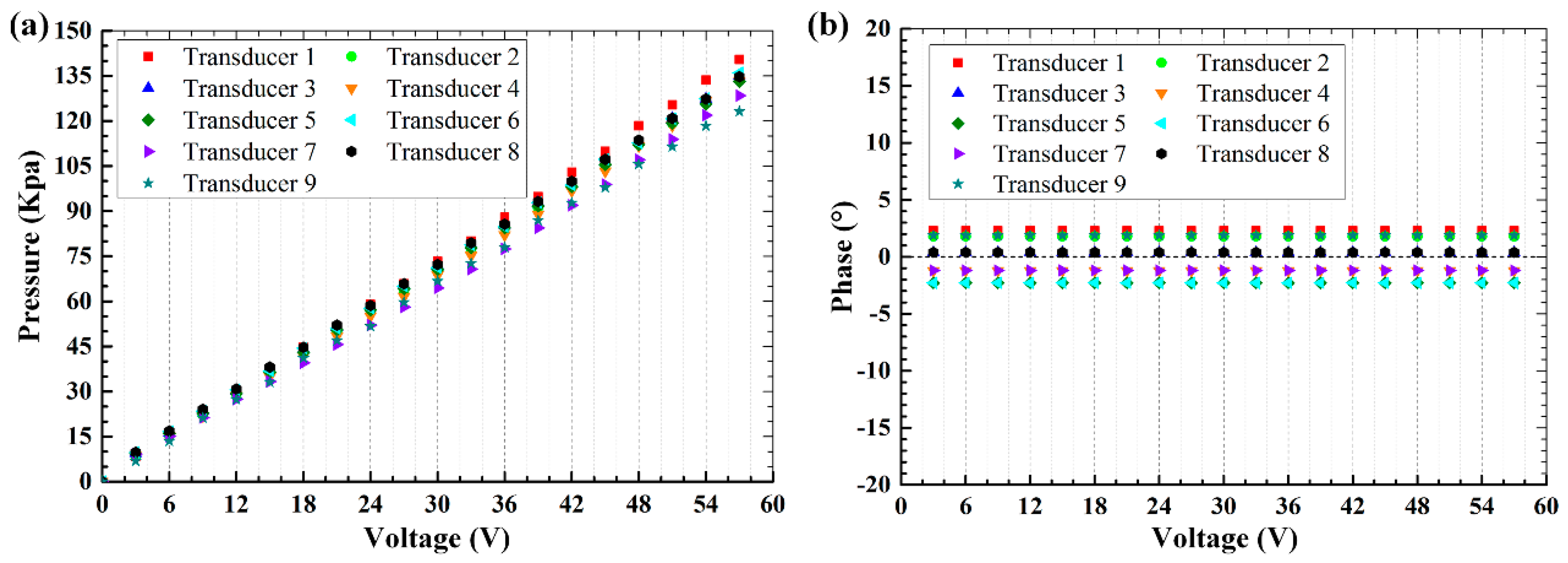
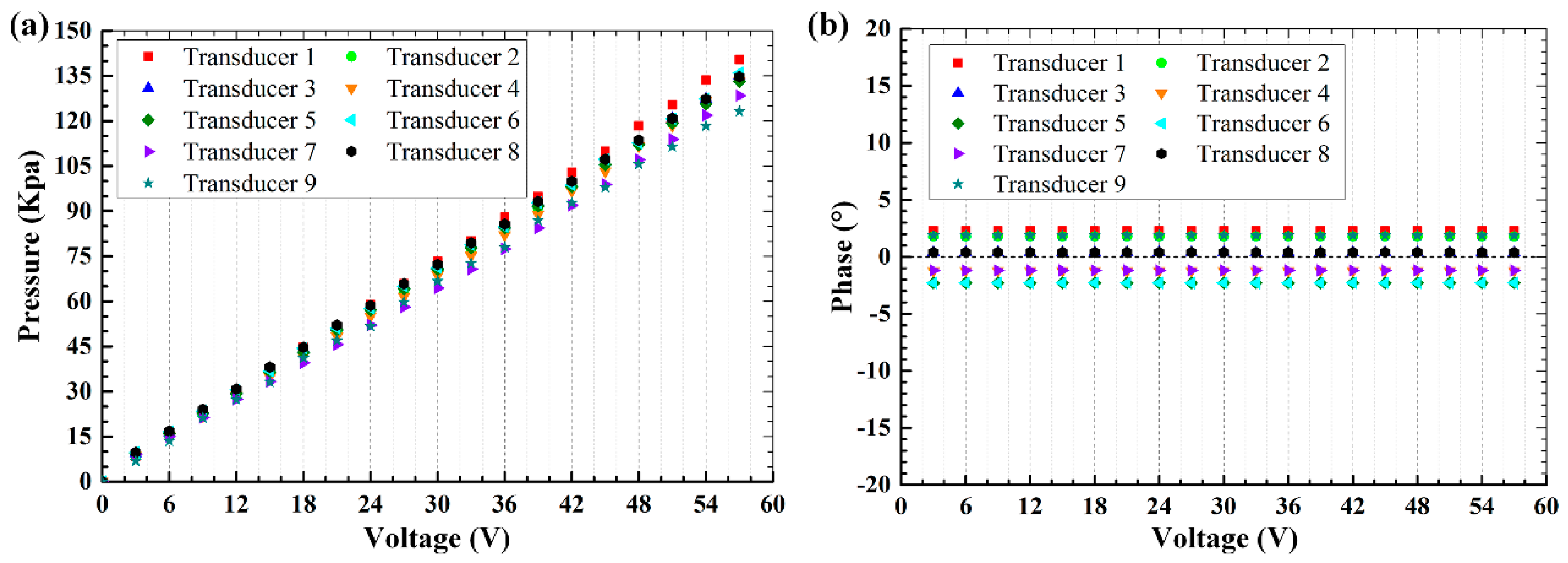
4.1. Transducer Calibration
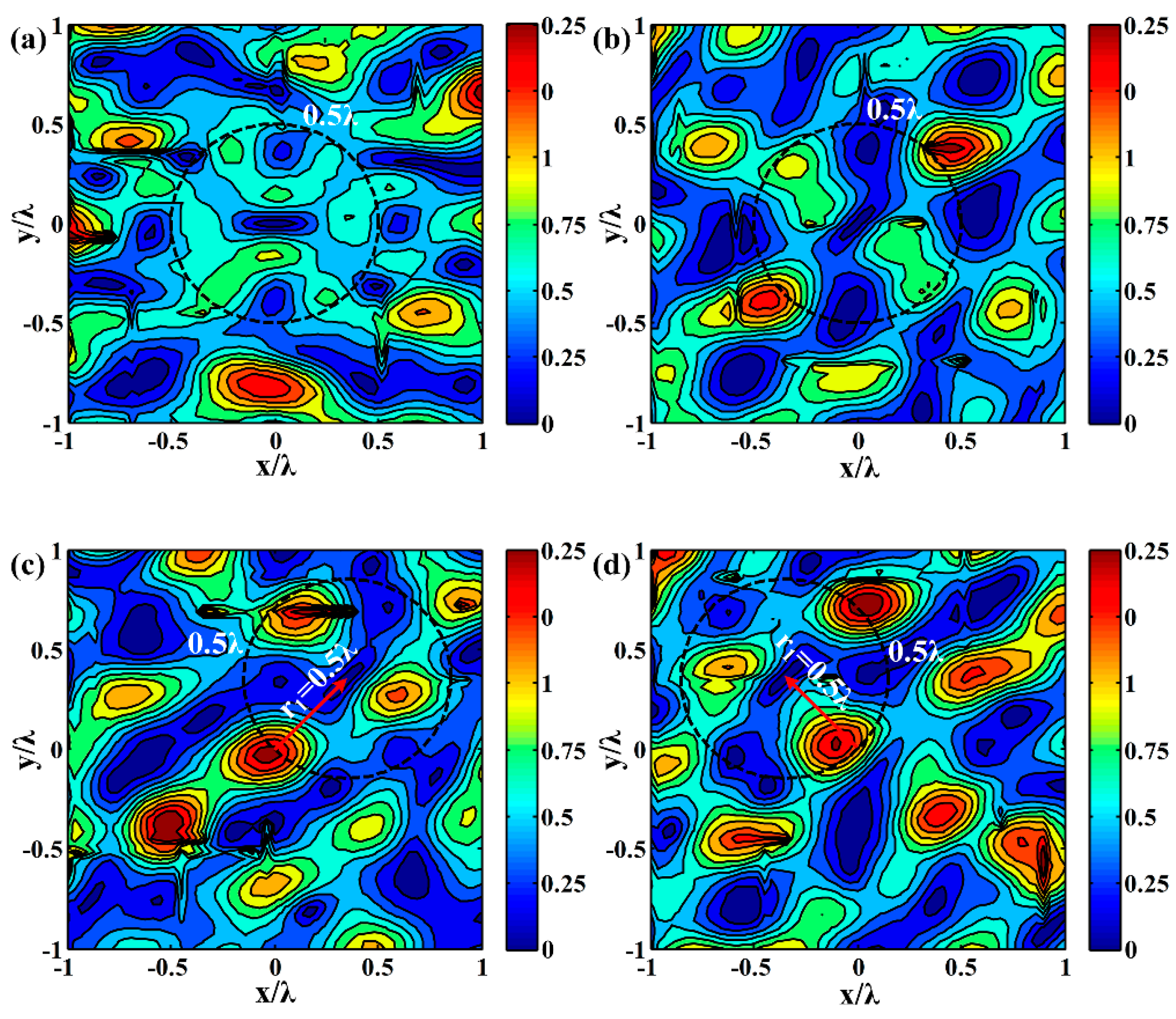
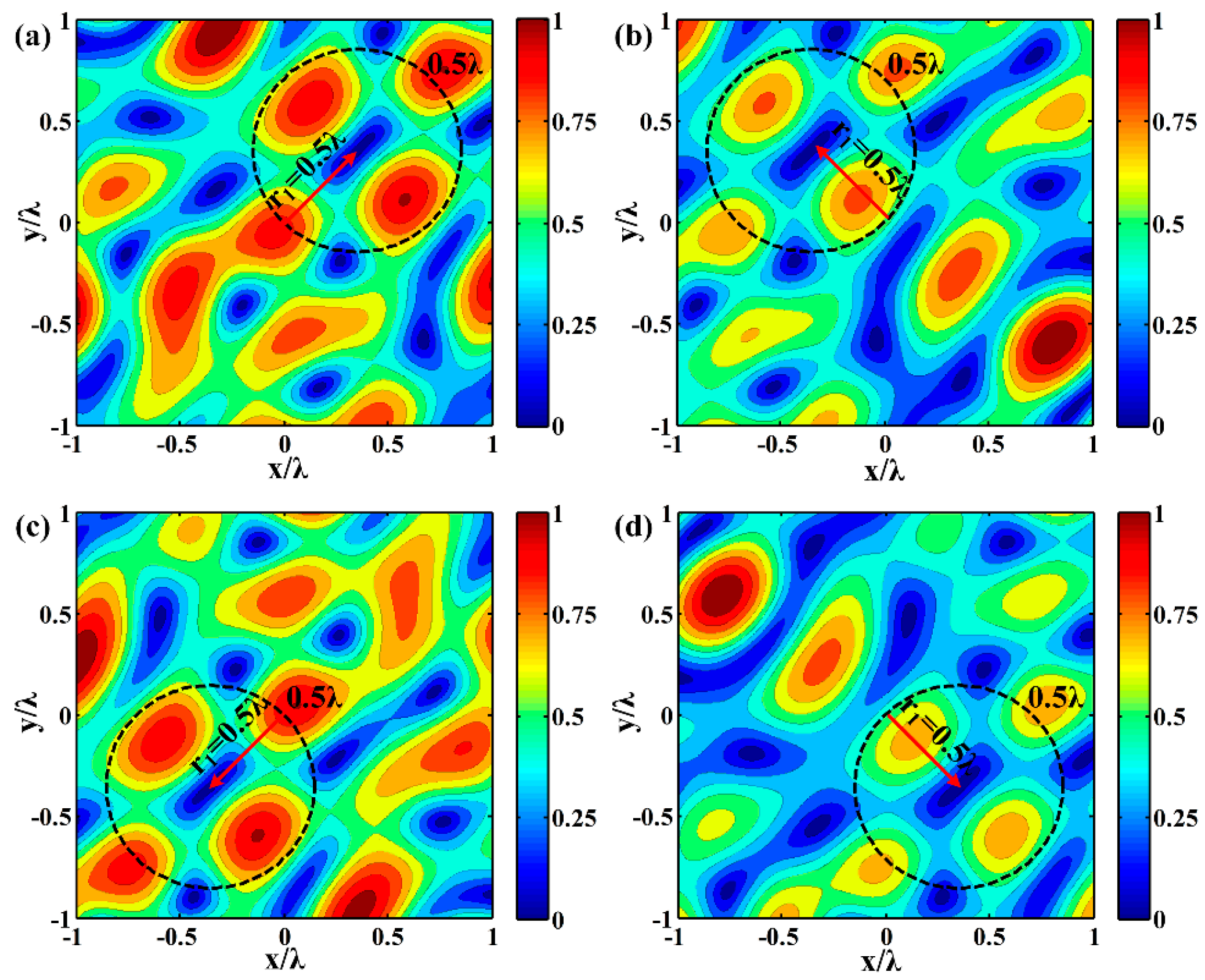
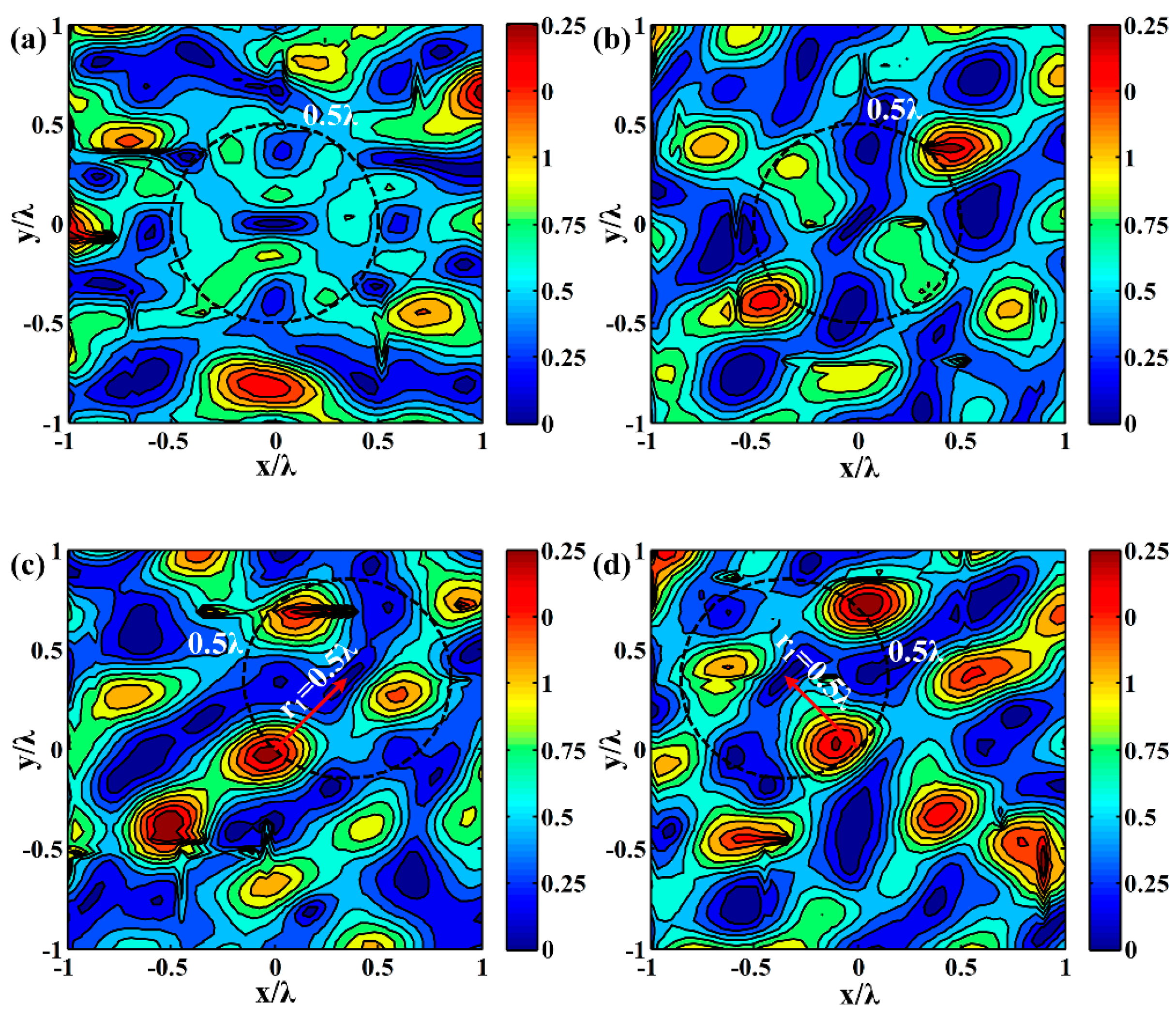
4.2. Measurement of the Synthesized Sound Pressure Field
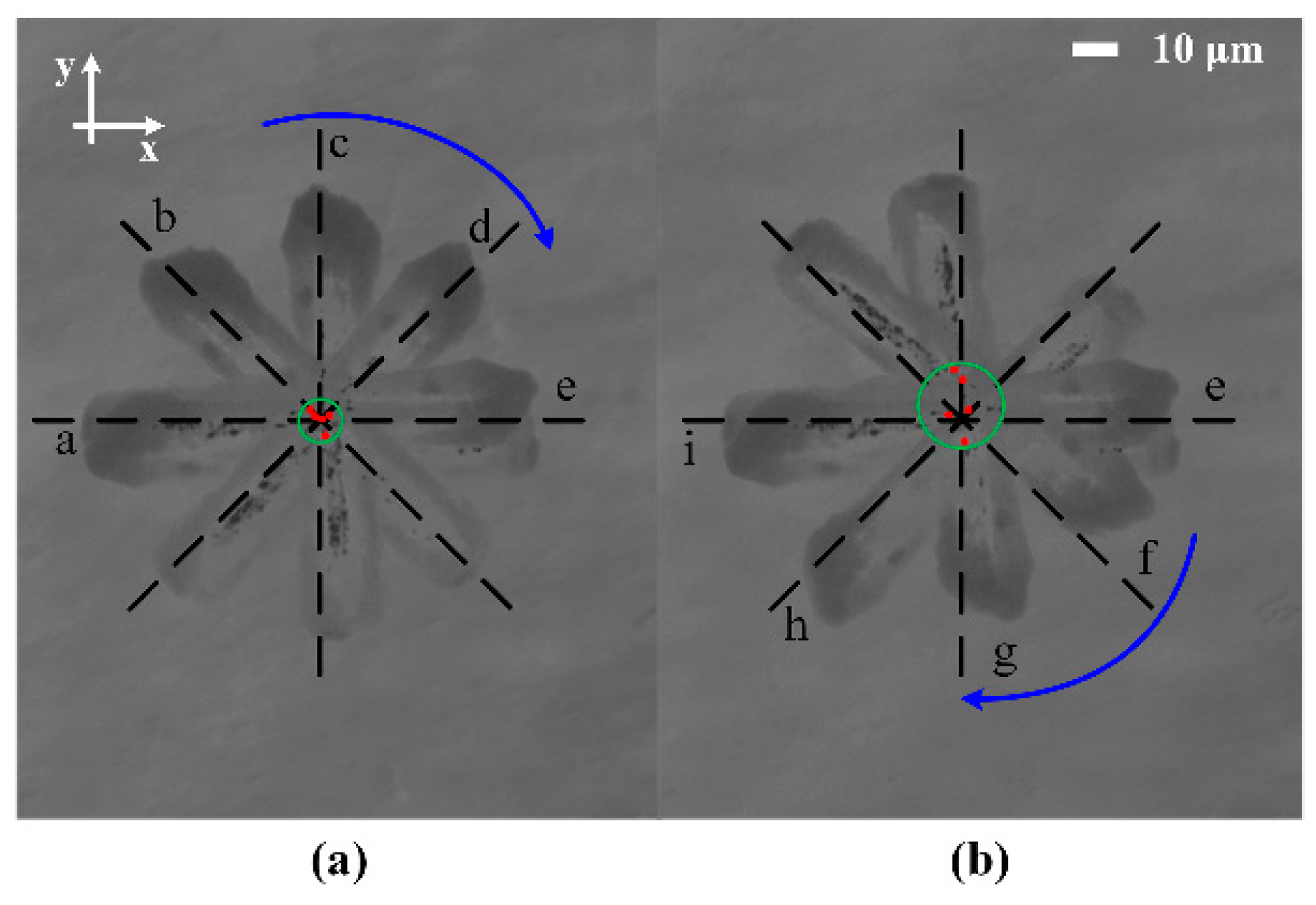
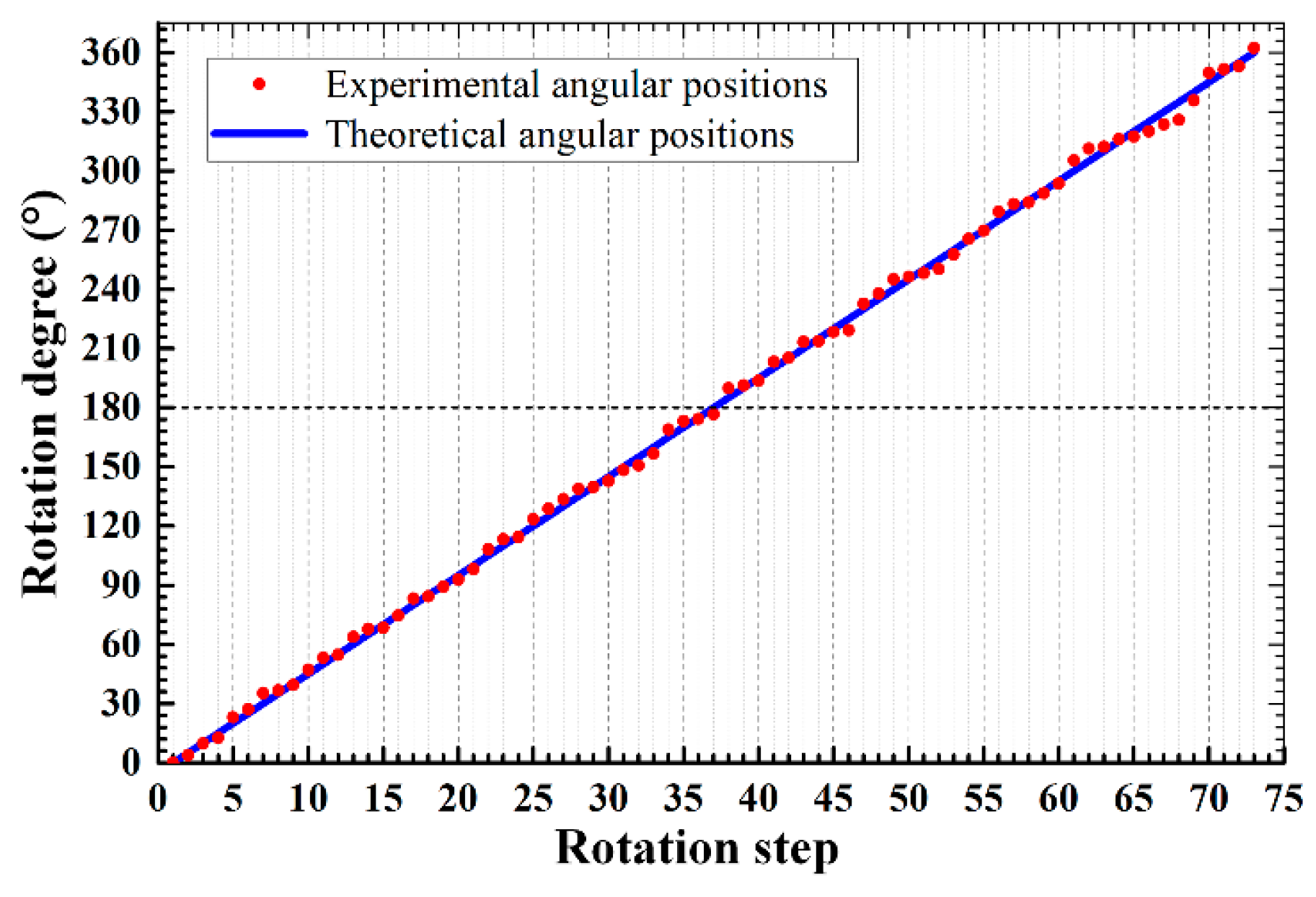
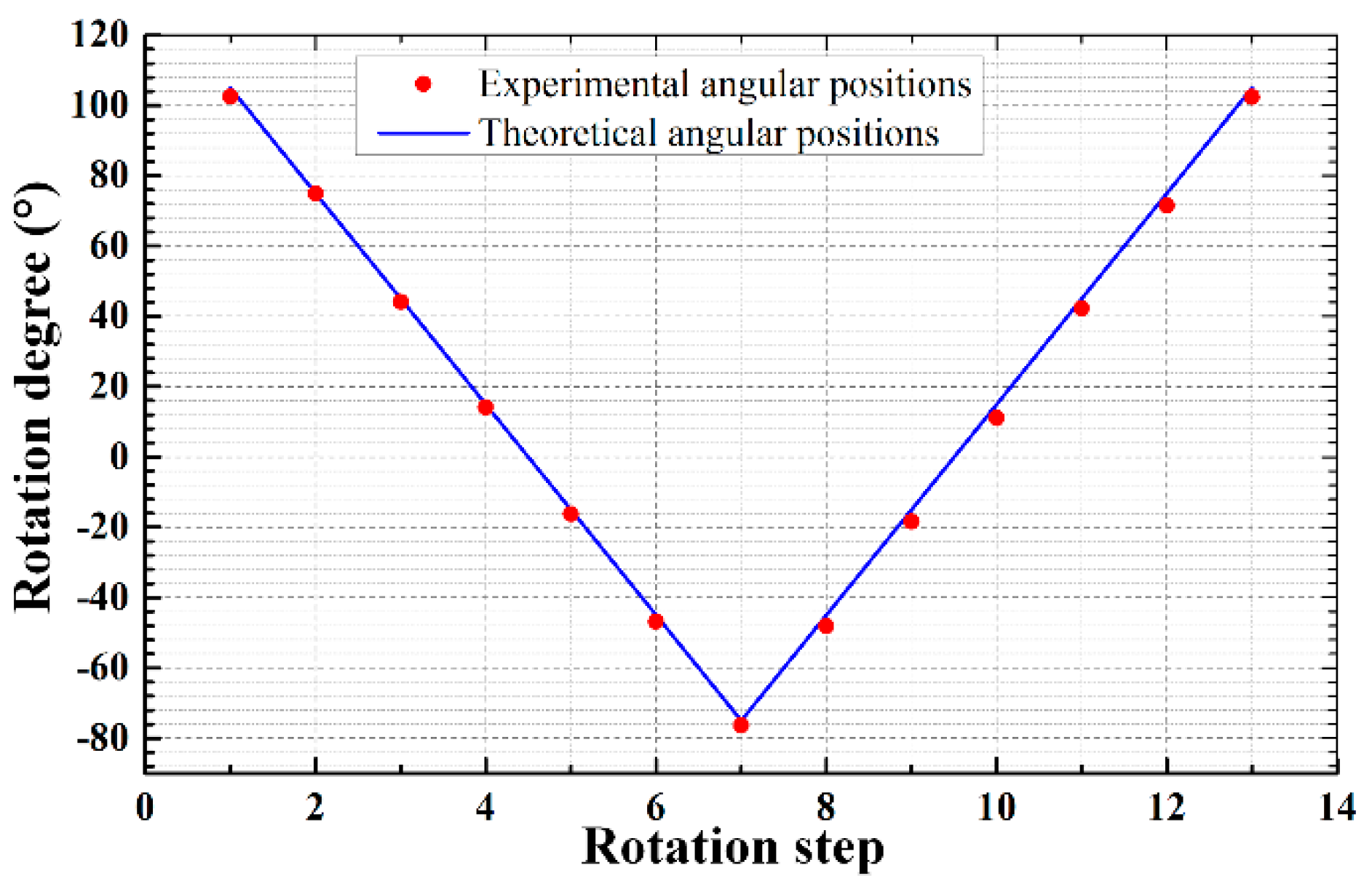
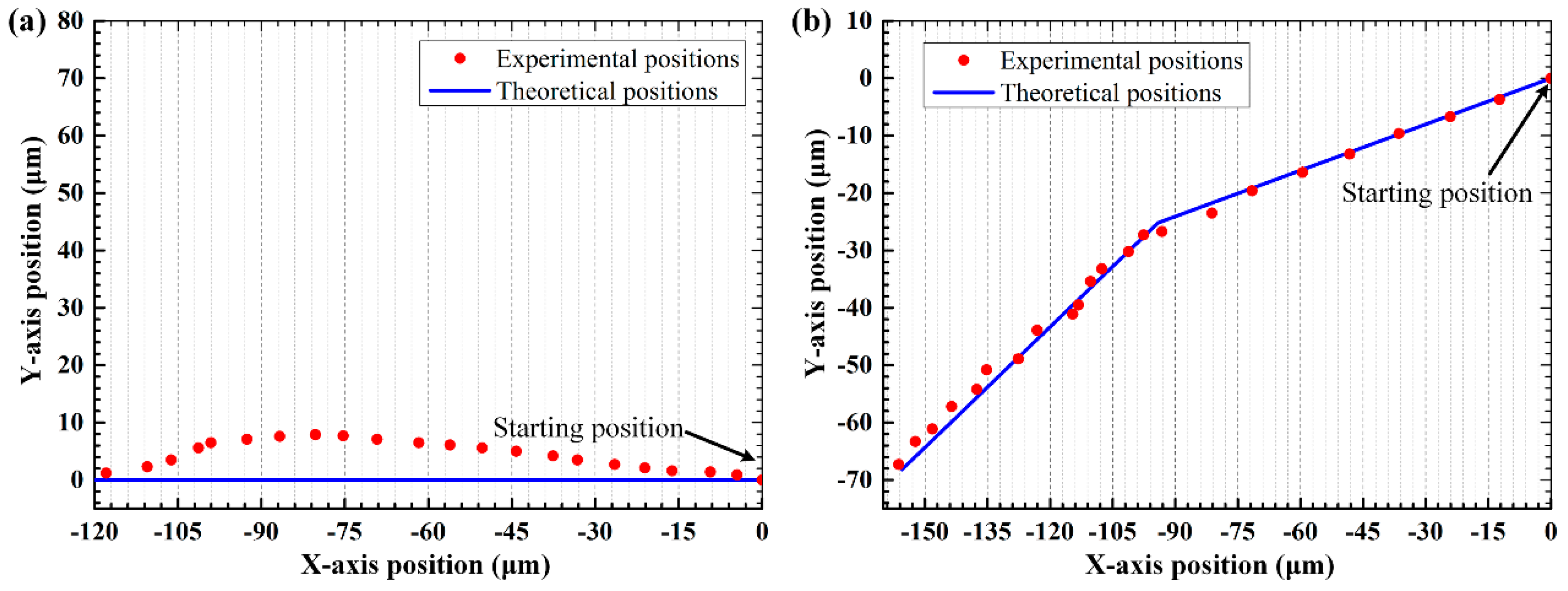
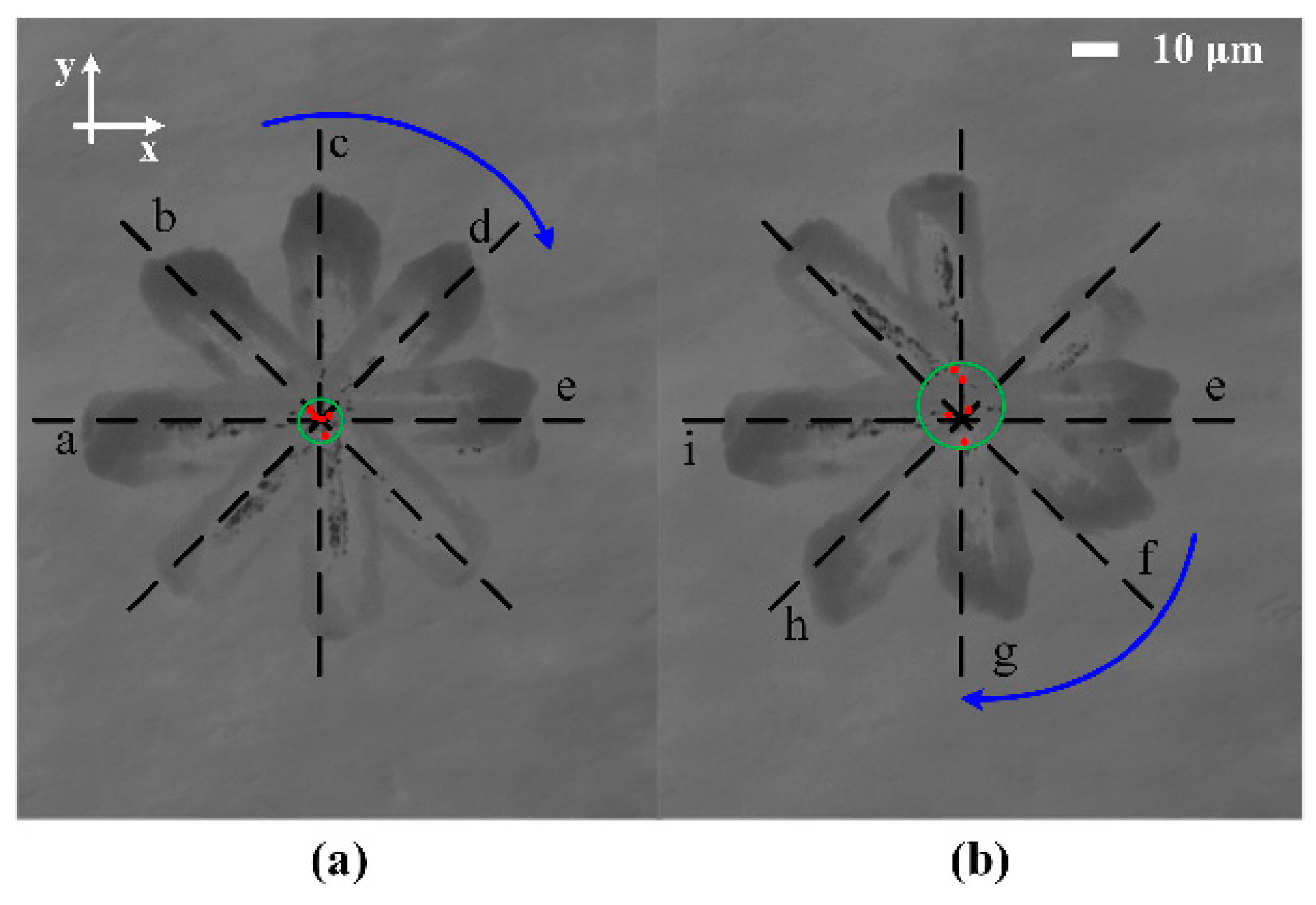
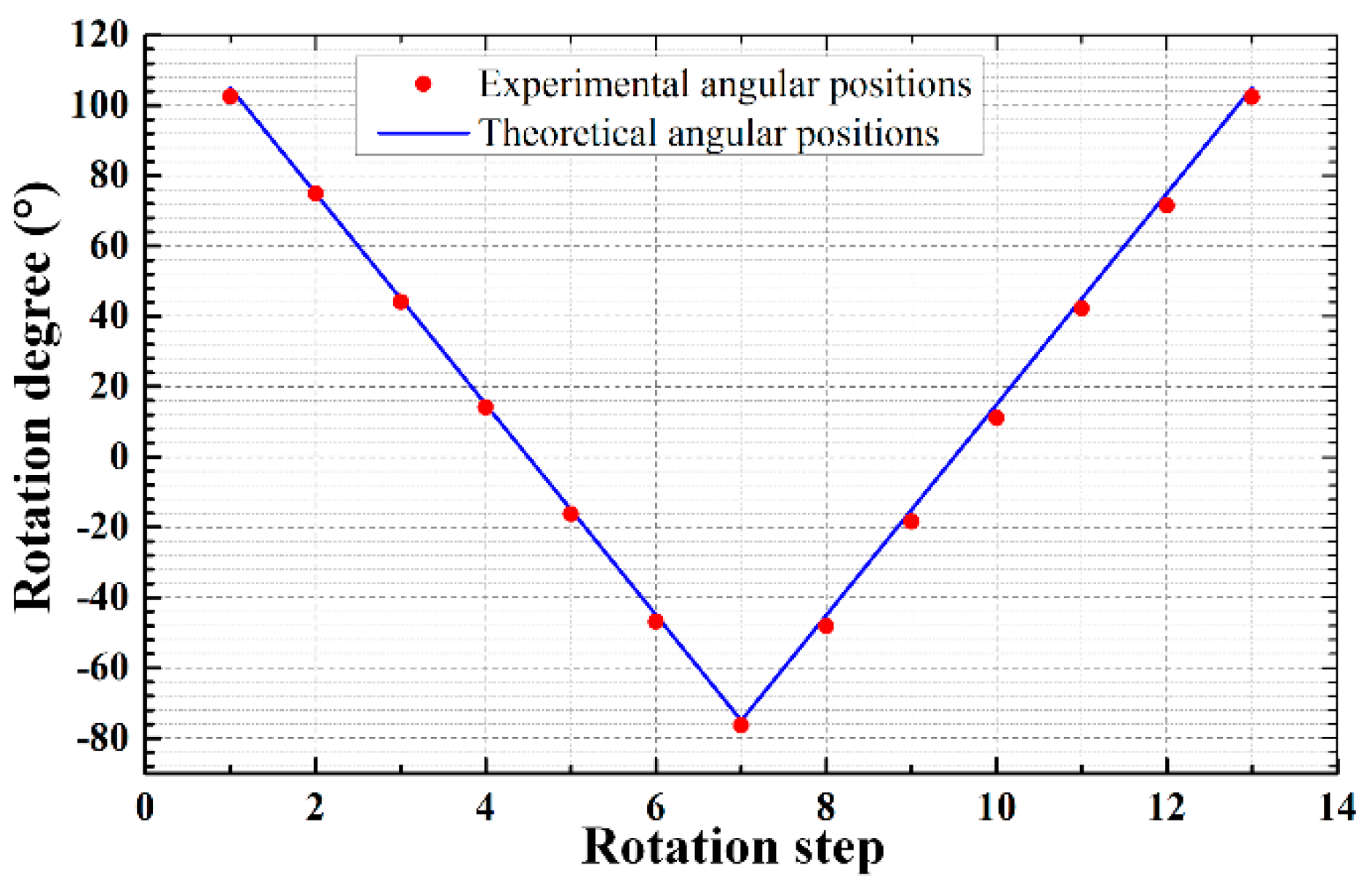
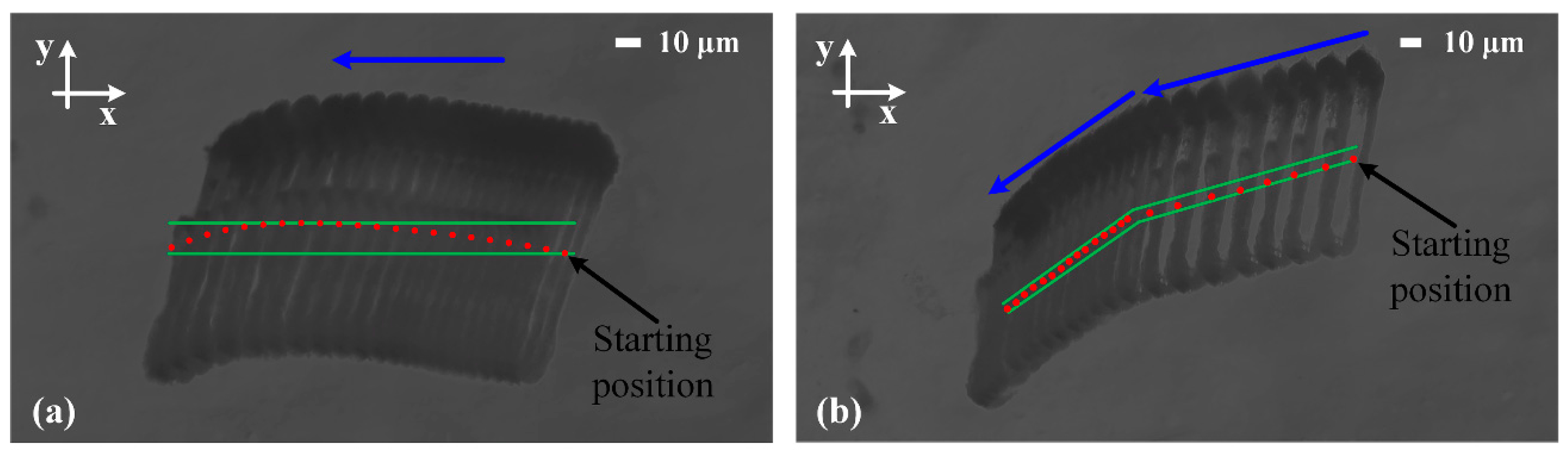
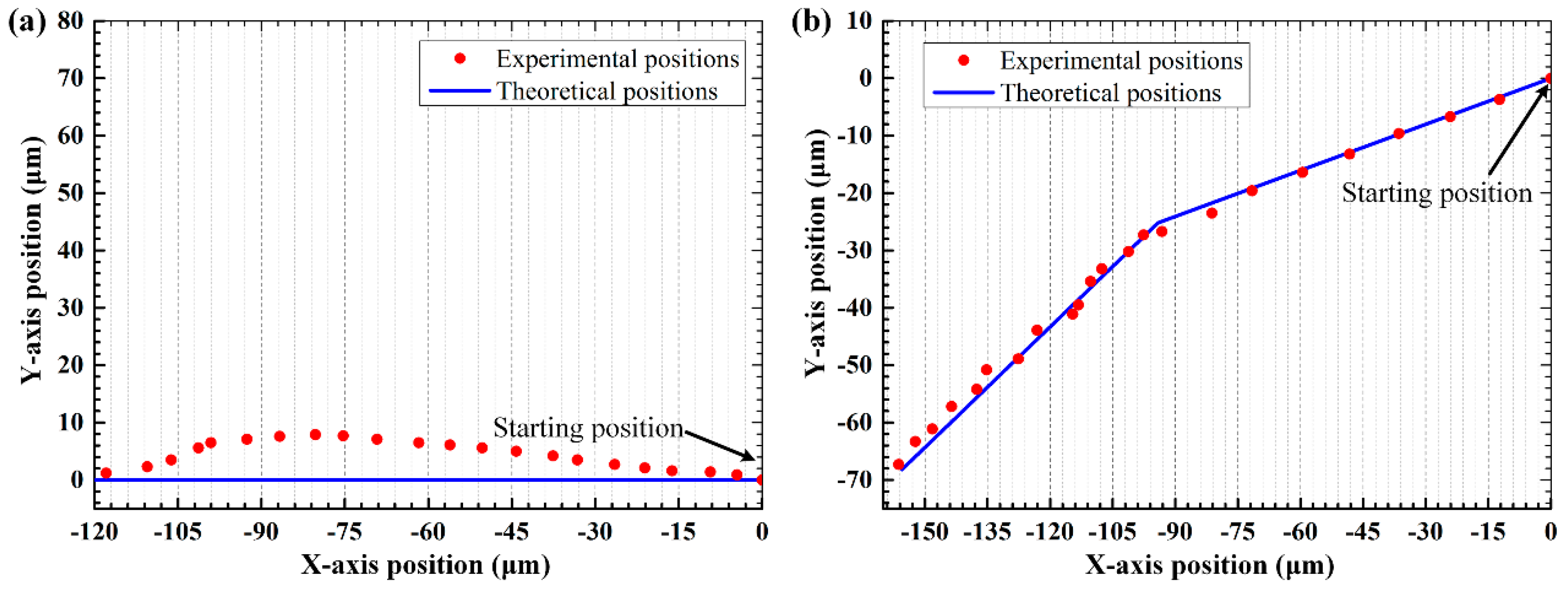
4.3. Particle Rotation and Transportation
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Habaza, M.; Kirschbaum, M.; Guernth-Marschner, C.; Dardikman, G.; Barnea, I.; Korenstein, R.; Duschl, C.; Shaked, N.T. Rapid 3D Refractive-Index Imaging of Live Cells in Suspension without Labeling Using Dielectrophoretic Cell Rotation. Adv. Sci. 2017, 4, 1600205. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, D.; Ozcelik, A.; Bojanala, N.; Nama, N.; Upadhyay, A.; Chen, Y.; Hanna-Rose, W.; Huang, T.J. Rotational manipulation of single cells and organisms using acoustic waves. Nat. Commun. 2016, 7, 11085. [Google Scholar] [CrossRef] [PubMed]
- Ozcelik, A.; Nama, N.; Huang, P.H.; Kaynak, M.; McReynolds, M.R.; Hanna-Rose, W.; Huang, T.J. Acoustofluidic Rotational Manipulation of Cells and Organisms Using Oscillating Solid Structures. Small 2016, 12, 5120–5125. [Google Scholar] [CrossRef] [PubMed]
- Elbez, R.; McNaughton, B.H.; Patel, L.; Pienta, K.J.; Kopelman, R. Nanoparticle induced cell magneto-rotation: Monitoring morphology, stress and drug sensitivity of a suspended single cancer cell. PLoS ONE 2011, 12, e28475. [Google Scholar] [CrossRef] [PubMed]
- Tanner, K.; Mori, H.; Mroue, R.; Bruni-Cardoso, A.; Bissell, M.J.; Tanner, K.; Mori, H.; Mroue, R.; Bruni-Cardoso, A.; Bissell, M.J. Coherent angular motion in the establishment of multicellular architecture of glandular tissues. Proc. Natl. Acad. Sci. USA 2012, 109, 1973–1978. [Google Scholar] [CrossRef] [PubMed]
- Mohanty, S.K.; Uppal, A.; Gupta, P.K. Self-rotation of red blood cells in optical tweezers: Prospects for high throughput malaria diagnosis. Biotechnol. Lett. 2004, 26, 971–974. [Google Scholar] [CrossRef] [PubMed]
- Yamahira, S.; Hatanaka, S.-I.; Kuwabara, M.; Asai, S. Orientation of Fibers in Liquid by Ultrasonic Standing Waves. Jpn. J. Appl. Phys. 2000, 39, 3683–3687. [Google Scholar] [CrossRef]
- Lee, P.; Lin, R.; Moon, J.; Lee, L.P. Microfluidic alignment of collagen fibers for in vitro cell culture. Biomed. Microdevices 2006, 8, 35–41. [Google Scholar] [CrossRef] [PubMed]
- Vandaele, V.; Lambert, P.; Delchambre, A. Non-contact handling in microassembly: Acoustical levitation. Precis. Eng. 2005, 29, 491–505. [Google Scholar] [CrossRef]
- Bogue, R. Assembly of 3D micro-components: A review of recent research. Assem. Autom. 2011, 31, 309–314. [Google Scholar] [CrossRef]
- Grier, D.G. A revolution in optical manipulation. Nature 2003, 424, 810–816. [Google Scholar] [CrossRef] [PubMed]
- Voldman, J. Electrical Forces for Microscale Cell Manipulation. Annu. Rev. Biomed. Eng. 2006, 8, 425–454. [Google Scholar] [CrossRef] [PubMed]
- Keshoju, K.; Xing, H.; Sun, L. Magnetic field driven nanowire rotation in suspension. Appl. Phys. Lett. 2007, 91, 123114. [Google Scholar] [CrossRef]
- King, L.V. On the Acoustic Radiation Pressure on Spheres. Proc. R. Soc. Lond. A 1934, 147, 212–240. [Google Scholar] [CrossRef]
- Rasmussen, M.B.; Oddershede, L.B.; Siegumfeldt, H. Optical tweezers cause physiological damage to Escherichia coli and Listeria bacteria. Appl. Environ. Microbiol. 2008, 74, 2441–2446. [Google Scholar] [CrossRef] [PubMed]
- Guo, F.; Mao, Z.; Chen, Y.; Xie, Z.; Li, P.; Ren, L.; Liu, J.; Yang, J.; Dao, M.; Suresh, S.; et al. Three-dimensional manipulation of single cells using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2016, 113, 1522–1527. [Google Scholar] [CrossRef] [PubMed]
- Jia, K.; Yang, K.; Fan, Z.; Ju, B.F. A contactless methodology of picking up micro-particles from rigid surfaces by acoustic radiation force. Rev. Sci. Instrum. 2012, 83, 014902. [Google Scholar] [CrossRef] [PubMed]
- Marzo, A.; Seah, S.A.; Drinkwater, B.W.; Sahoo, D.R.; Long, B.; Subramanian, S. Holographic acoustic elements for manipulation of levitated objects. Nat. Commun. 2015, 6, 8661. [Google Scholar] [CrossRef] [PubMed]
- Jia, K.; Yang, K.; Mei, D. Quantitative trap and long range transportation of micro-particles by using phase controllable acoustic wave. J. Appl. Phys. 2012, 112, 054908. [Google Scholar] [CrossRef]
- Li, P.; Mao, Z.; Peng, Z.; Zhou, L.; Chen, Y.; Huang, P.-H.; Truica, C.I.; Drabick, J.J.; El-Deiry, W.S.; Dao, M.; et al. Acoustic separation of circulating tumor cells. Acoustic separation of circulating tumor cells. Proc. Natl. Acad. Sci. USA 2015, 112, 4970–4975. [Google Scholar] [CrossRef] [PubMed]
- Guo, F.; Li, P.; French, J.B.; Mao, Z.; Zhao, H.; Li, S.; Nama, N.; Fick, J.R.; Benkovic, S.J.; Huang, T.J. Controlling cell-cell interactions using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2015, 112, 43–48. [Google Scholar] [CrossRef] [PubMed]
- Collino, R.R.; Ray, T.R.; Fleming, R.C.; Sasaki, C.H.; Haj-Hariri, H.B.; Matthew, R. Acoustic field controlled patterning and assembly of anisotropic particles. Extrem. Mech. Lett. 2015, 5, 37–46. [Google Scholar] [CrossRef]
- Riaud, A.; Baudoin, M.; Bou Matar, O.; Becerra, L.; Thomas, J.-L. Selective Manipulation of Microscopic Particles with Precursor Swirling Rayleigh Wavesb. Phys. Rev. Appl. 2017, 7, 024007. [Google Scholar] [CrossRef]
- Courtney, C.R.P.; Demore, C.E.M.; Wu, H.; Grinenko, A.; Wilcox, P.D.; Cochran, S.; Drinkwater, B.W. Independent trapping and manipulation of microparticles using dexterous acoustic tweezers. Appl. Phys. Lett. 2014, 104, 154103. [Google Scholar] [CrossRef] [Green Version]
- Yoon, C.; Kang, B.J.; Lee, C.; Kim, H.H.; Shung, K.K. Multi-particle trapping and manipulation by a high-frequency array transducer. Appl. Phys. Lett. 2014, 105, 214103. [Google Scholar] [CrossRef] [PubMed]
- Courtney, C.R.P.; Drinkwater, B.W.; Demore, C.E.M.; Cochran, S.; Grinenko, A.; Wilcox, P.D. Dexterous manipulation of microparticles using Bessel-function acoustic pressure fields. Appl. Phys. Lett. 2013, 102, 123508. [Google Scholar] [CrossRef] [Green Version]
- Volke-Sepúlveda, K.; Santillán, A.O.; Boullosa, R.R. Transfer of Angular Momentum to Matter from Acoustical Vortices in Free Space. Phys. Rev. Lett. 2008, 100, 024302. [Google Scholar] [CrossRef] [PubMed]
- Skeldon, K.D.; Wilson, C.; Edgar, M.; Padgett, M.J. An acoustic spanner and its associated rotational Doppler shift. New J. Phys. 2008, 10, 013018. [Google Scholar] [CrossRef]
- Zhang, L.; Marston, P.L. Angular momentum flux of nonparaxial acoustic vortex beams and torques on axisymmetric objects. Phys. Rev. E 2011, 84, 065601. [Google Scholar] [CrossRef] [PubMed]
- Anhauser, A.; Wunenburger, R.; Brasselet, E. Acoustic rotational manipulation using orbital angular momentum transfer. Phys. Rev. Lett. 2012, 109, 034301. [Google Scholar] [CrossRef] [PubMed]
- Gspan, S.; Meyer, A.; Bernet, S.; Ritsch-Marte, M. Optoacoustic generation of a helicoidal ultrasonic beam. J. Acoust. Soc. Am. 2004, 115, 1142–1146. [Google Scholar] [CrossRef]
- Hefner, B.T.; Marston, P.L. An acoustical helicoidal wave transducer with applications for the alignment of ultrasonic and underwater systems. J. Acoust. Soc. Am. 1999, 106, 3313–3316. [Google Scholar] [CrossRef]
- Nyborg, W.L. Acoustic Streaming near a Boundary. J. Acoust. Soc. Am. 1958, 30, 329–339. [Google Scholar] [CrossRef]
- Lamprecht, A.; Schwarz, T.; Wang, J.; Dual, J. Viscous torque on spherical micro particles in two orthogonal acoustic standing wave fields. J. Acoust. Soc. Am. 2015, 138, 23–32. [Google Scholar] [CrossRef] [PubMed]
- Lamprecht, A.; Schwarz, T.; Wang, J.; Dual, J. Investigations on the time-averaged viscous torque acting on rotating microparticles. In Proceedings of the 2013 International Congress on Ultrasonics, Singapore, 2–5 May 2013; pp. 147–152. [Google Scholar]
- Maidanik, G. Torques Due to Acoustical Radiation Pressure. J. Acoust. Soc. Am. 1958, 30, 620–623. [Google Scholar] [CrossRef]
- Zhang, L.; Marston, P.L. Acoustic radiation torque and the conservation of angular momentum (L). J. Acoust. Soc. Am. 2011, 4, 1679–1680. [Google Scholar] [CrossRef] [PubMed]
- Schwarz, T.; Hahn, P.; Petit-Pierre, G.; Dual, J. Rotation of fibers and other non-spherical particles by the acoustic radiation torque. Microfluid. Nanofluid. 2014, 18, 65–79. [Google Scholar] [CrossRef]
- Foresti, D.; Poulikakos, D. Acoustophoretic Contactless Elevation, Orbital Transport and Spinning of Matter in Air. Phys. Rev. Lett. 2014, 112, 024301. [Google Scholar] [CrossRef] [PubMed]
- Brodeur, P. Motion of fluid-suspended fibres in a standing wave field. Ultrasonics 1991, 29, 302–307. [Google Scholar] [CrossRef]
- Oberti, S.; Neild, A.; Dual, J. Manipulation of micrometer sized particles within a micromachined fluidic device to form two-dimensional patterns using ultrasound. J. Acoust. Soc. Am. 2007, 121, 778–785. [Google Scholar] [CrossRef] [PubMed]
- Neild, A.; Oberti, S.; Haake, A.; Dual, J. Finite element modeling of a microparticle manipulator. Ultrasonics 2006, 44, e455–e460. [Google Scholar] [CrossRef] [PubMed]
- Neild, A.; Oberti, S.; Dual, J. Design, modeling and characterization of microfluidic devices for ultrasonic manipulation. Sens. Actuators B Chem. 2007, 121, 452–461. [Google Scholar] [CrossRef]
- Schwarz, T.; Petit-Pierre, G.; Dual, J. Rotation of non-spherical micro-particles by amplitude modulation of superimposed orthogonal ultrasonic modes. J. Acoust. Soc. Am. 2013, 133, 1260–1268. [Google Scholar] [CrossRef] [PubMed]
- Grinenko, A.; Wilcox, P.D.; Courtney, C.R.; Drinkwater, B.W. Proof of principle study of ultrasonic particle manipulation by a circular array device. Proc. Math Phys. Eng. Sci. 2012, 468, 3571–3586. [Google Scholar] [CrossRef] [PubMed]
- Ward, D.B.; Abhayapala, T.D. Reproduction of a plane-wave sound field using an array of loudspeakers. IEEE Trans. Speech Audio. Process. 2001, 9, 697–707. [Google Scholar] [CrossRef]
- Wu, Y.J.; Abhayapala, T.D. Theory and Design of Soundfield Reproduction Using Continuous Loudspeaker Concept. IEEE Trans Audio Speech Lang. Process. 2009, 17, 107–116. [Google Scholar] [CrossRef]
- Fan, Z.; Mei, D.; Yang, K.; Chen, Z. Acoustic radiation torque on an irregularly shaped scatterer in an arbitrary sound field. J. Acoust. Soc. Am. 2008, 124, 2727–2732. [Google Scholar] [CrossRef] [PubMed]
- Jia, K.; Fan, Z.; Yang, K. 3 DOF noncontact clamping stage for micro-stereolithography on embedded material. Int. J. Appl. Electrom. 2016, 52, 183–190. [Google Scholar] [CrossRef]
- Doinikov, A.A. Acoustic radiation pressure on a rigid sphere in a viscous fluid. Proc. R. Soc. Loud. A 1994, 447, 447–466. [Google Scholar] [CrossRef]
- Danilov, S.D.; Mironov, M.A. Mean force on a small sphere in a sound field in a viscous fluid. J. Acoust. Soc. Am. 2000, 107, 143–153. [Google Scholar] [CrossRef] [PubMed]
- Settnes, M.; Bruus, H. Forces acting on a small particle in an acoustical field in a viscous fluid. Phys. Rev. E 2012, 85, 016327. [Google Scholar] [CrossRef] [PubMed]
- Jia, K.; Meng, J.; Yang, K.; Fan, Z.; Ju, B.-F. Building the isotropic acoustic potential well with strong constraint boundary to improve the stability of ultrasonic transportation. J. Appl. Phys. 2013, 113, 064903. [Google Scholar] [CrossRef]
- Williams, E.G. Fourier Acoustics: Sound Radiation and Nearfield Acoustical Holography; Academic Press: San Diego, CA, USA, 1999; pp. 239–251. ISBN 978-0-12-753960-7. [Google Scholar]
- Deng, S.; Jia, K.; Chen, J.; Mei, D.; Yang, K. Relative position control and coalescence of independent microparticles using ultrasonic waves. J. Appl. Phys. 2017, 121, 184503. [Google Scholar] [CrossRef]
- Bernassau, A.L.; Glynne-Jones, P.; Gesellchen, F.; Riehle, M.; Hill, M.; Cumming, D.R.S. Controlling acoustic streaming in an ultrasonic heptagonal tweezers with application to cell manipulation. Ultrasonics 2014, 54, 268–274. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Density (g/cm3) | Sound Speed (m/s) |
|---|---|---|
| Deionized water | 1.0 | 1480 |
| Strip-shaped silica particle | 2.33 | 5340 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, S.; Jia, K.; Wu, E.; Hu, X.; Fan, Z.; Yang, K. Controllable Micro-Particle Rotation and Transportation Using Sound Field Synthesis Technique. Appl. Sci. 2018, 8, 73. https://doi.org/10.3390/app8010073
Deng S, Jia K, Wu E, Hu X, Fan Z, Yang K. Controllable Micro-Particle Rotation and Transportation Using Sound Field Synthesis Technique. Applied Sciences. 2018; 8(1):73. https://doi.org/10.3390/app8010073
Chicago/Turabian StyleDeng, Shuang, Kun Jia, Eryong Wu, Xuxiao Hu, Zongwei Fan, and Keji Yang. 2018. "Controllable Micro-Particle Rotation and Transportation Using Sound Field Synthesis Technique" Applied Sciences 8, no. 1: 73. https://doi.org/10.3390/app8010073