A Fuzzy State-of-Charge Estimation Algorithm Combining Ampere-Hour and an Extended Kalman Filter for Li-Ion Batteries Based on Multi-Model Global Identification


Abstract
:Featured Application
Abstract
1. Introduction
1.1. Literature Review
1.2. Main Contributions
- (1)
- By comparing and analyzing nine models and five commonly used parameter identification algorithms, the most suitable ECM and parameter identification algorithm are decided.
- (2)
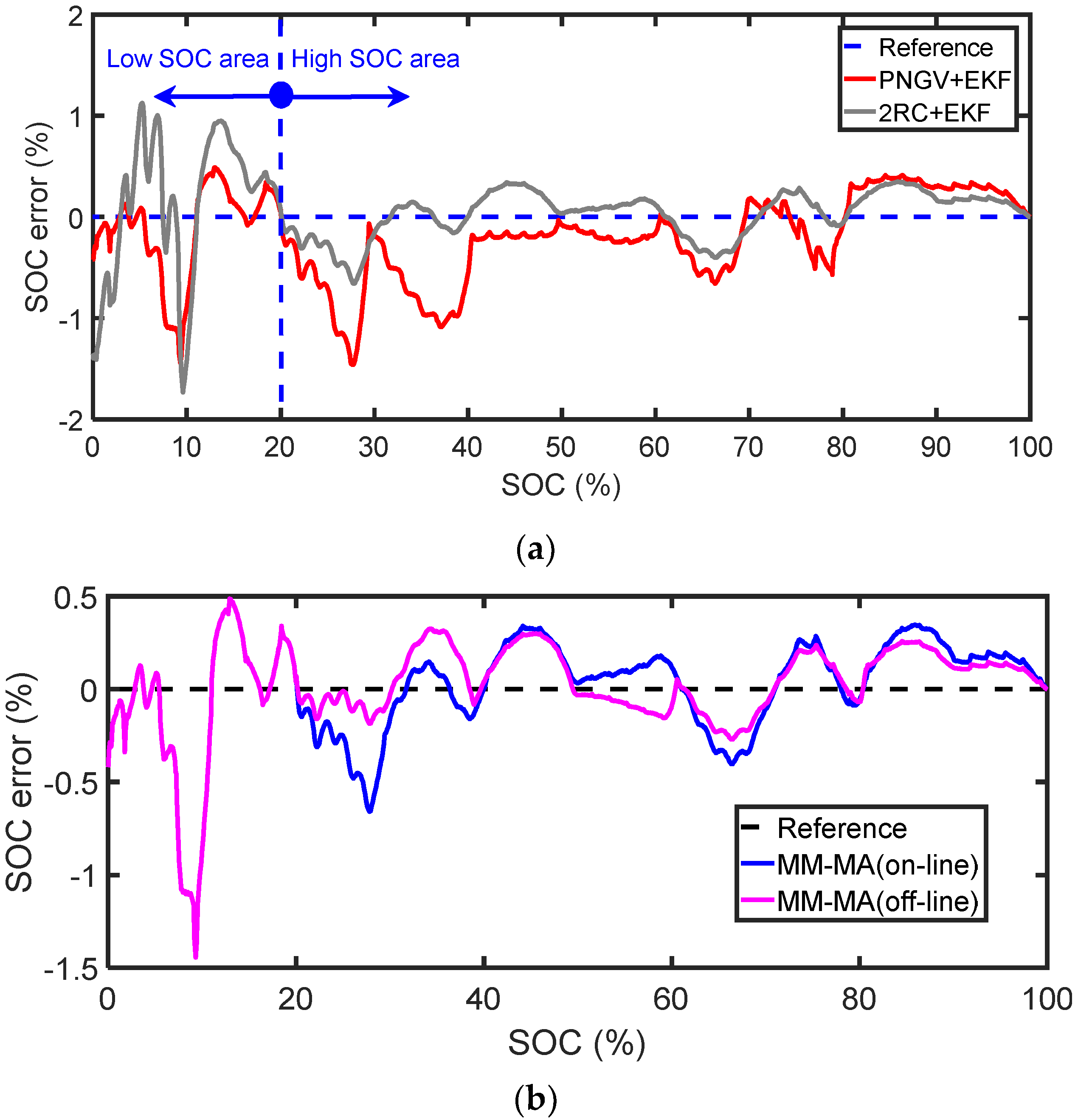
- The whole SOC area is divided into the high SOC area and low SOC area. Different ECMs and parameter identification algorithms are adopted considering SOC distribution. Based on this, a multi-model and multi-algorithm method is developed to fit the battery model. Experimental results show that the proposed composite model has higher model accuracy compared with a single model.
- (3)
- According to the error characteristics of EKF and AH, a fuzzy fusion SOC estimation algorithm, combining AH and EKF in the whole SOC area, is proposed, and the accuracy and robustness of the proposed algorithm are verified by six cases.
1.3. Organization of the Paper
2. Experiments
3. Model and Parameter Identification
3.1. Equivalent Circuit Models
3.2. Optimization Variables and the Objective Function for ECMs
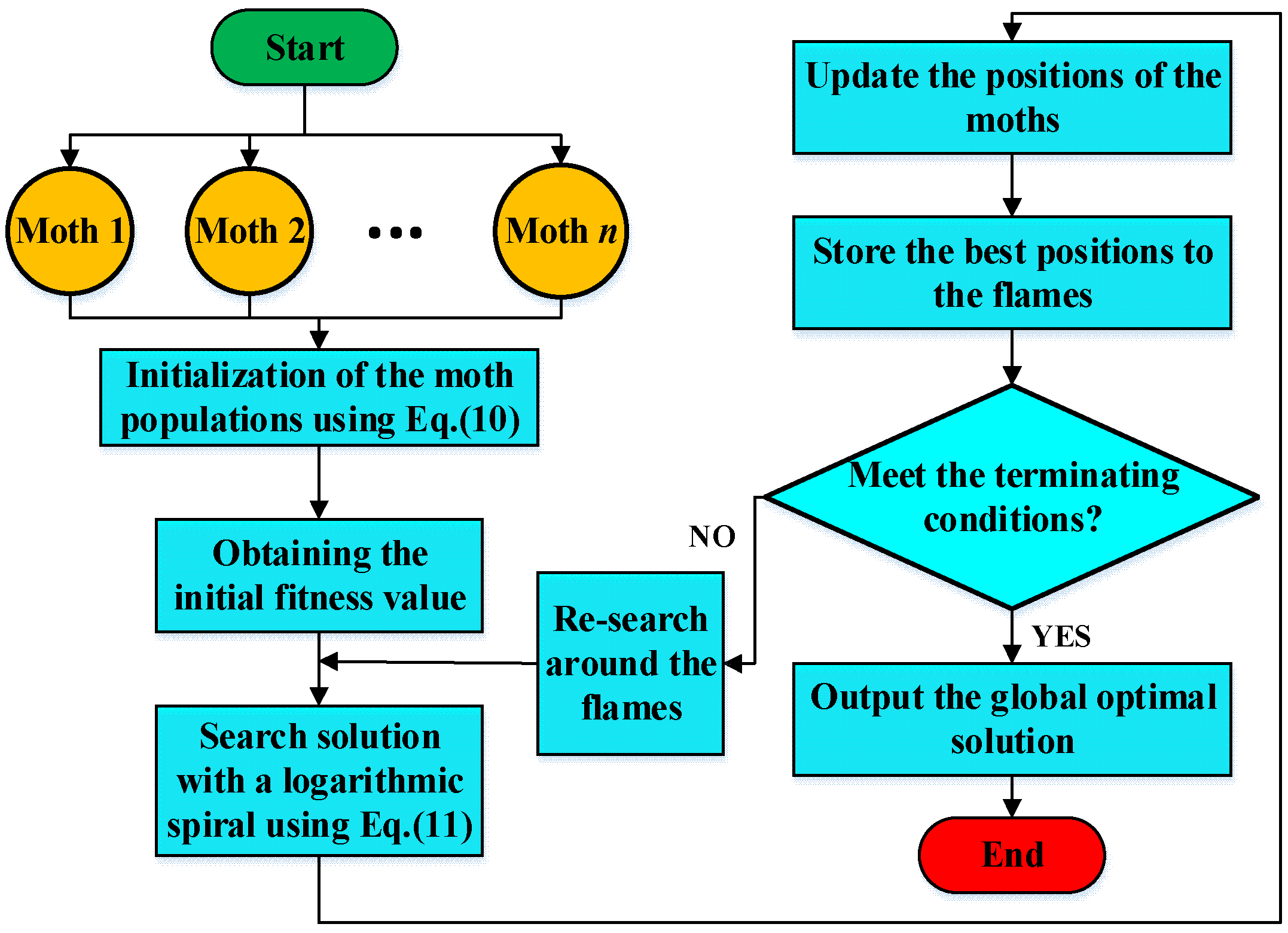
3.3. Moth-Flame Optimization Algorithm
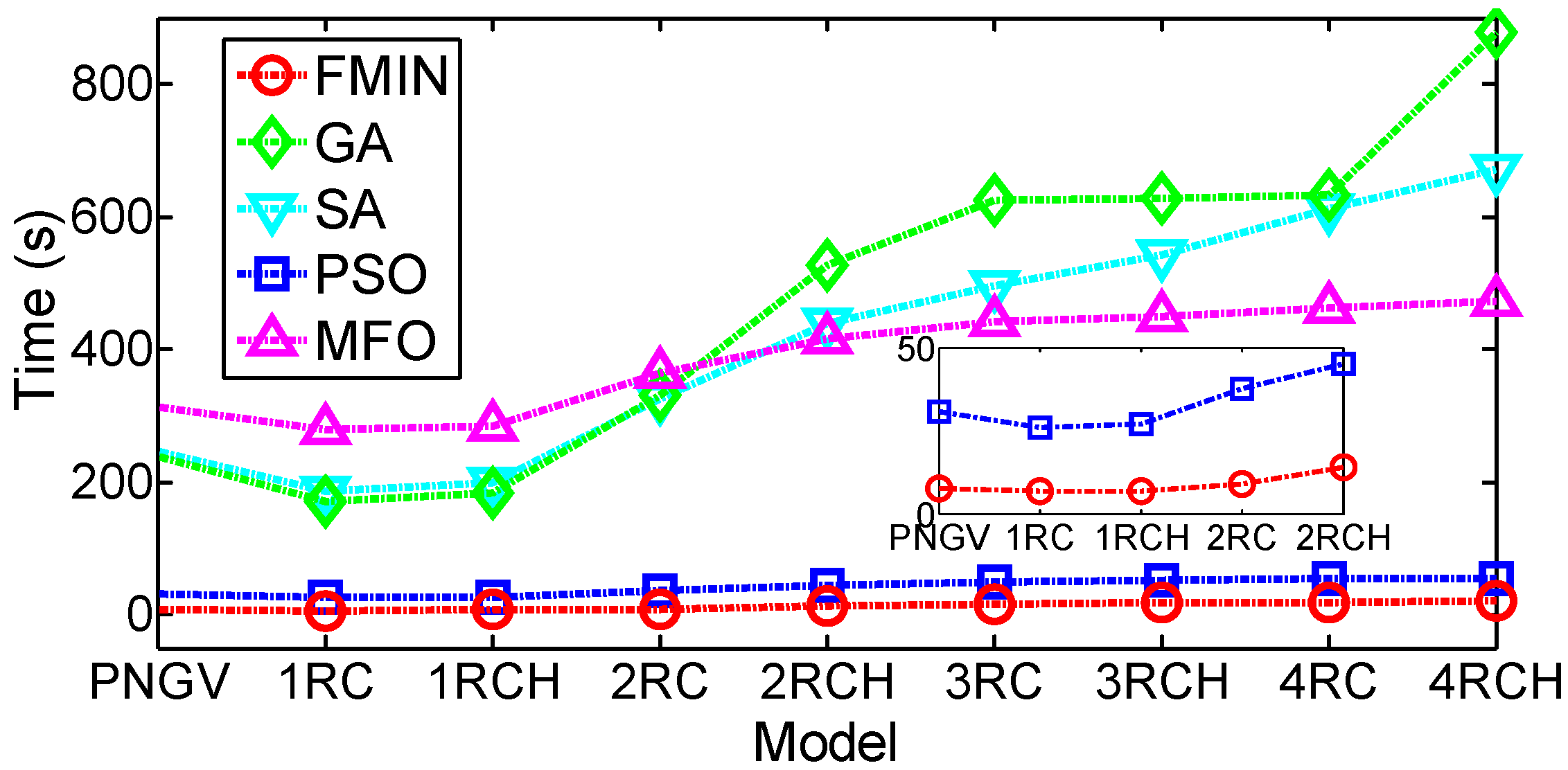
3.4. Comparative Study of Optimization Methods
3.5. Multi-Model and Multi-Algorithm Combination
4. SOC Estimation Method
4.1. EKF Method
| Algorithm 1. Summary of the extended Kalman filter (EKF) method for SOC estimation. |
| The nonlinear state-space model: where the first equation is the state equation, the second one is the output equation. is a state transition function and is a measurement function; and are independent zero-mean white Gaussian stochastic processes with covariance matrices and respectively. |
| Step 1. Initialization. For , set . |
| Step 2. Computation. For compute:
|
4.2. Ampere-Hour Counting Method
4.3. Fuzzy Fusion Algorithm
- When is relatively small and is negative, very large should be chosen to ensure that is more credible in the fuzzy fusion algorithm.
- When is relatively large and is positive, very small should be chosen to ensure that is more credible in the fuzzy fusion algorithm.
- When is relatively large and is negative, small should be chosen.
- When is relatively small and is positive, medium should be chosen to improve the stability of the control system.
5. Results and Discussion
5.1. Estimation Results Based on EKF
5.2. Case Studies for the Fuzzy Fusion Algorithm
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Ouyang, M.G.; Liu, G.M.; Lu, L.G.; Li, J.Q.; Han, X.B. Enhancing the estimation accuracy in low state-of-charge area: A novel onboard battery model through surface state of charge determination. J. Power Sources 2014, 270, 221–237. [Google Scholar] [CrossRef]
- Patil, M.S.; Panchal, S.; Kim, N.; Lee, M.-Y. Cooling performance characteristics of 20 ah lithium-ion pouch cell with cold plates along both surfaces. Energies 2018, 11, 2550. [Google Scholar] [CrossRef]
- Panchal, S.; Mcgrory, J.; Kong, J.; Fraser, R.; Fowler, M.; Dincer, I.; Agelin-Chaab, M. Cycling degradation testing and analysis of a lifepo4 battery at actual conditions. Int. J. Energy Res. 2017, 41, 2565–2575. [Google Scholar] [CrossRef]
- Zou, C.F.; Hu, X.S.; Wei, Z.B.; Wik, T.; Egardt, B. Electrochemical estimation and control for lithium-ion battery health-aware fast charging. IEEE Trans. Ind. Electron. 2018, 65, 6635–6645. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.J.; Zhou, L.; Gao, W.K. Electrical behavior of overdischarge-induced internal short circuit in lithium-ion cells. Electrochim. Acta 2018, 278, 245–254. [Google Scholar] [CrossRef]
- Tang, X.P.; Wang, Y.J.; Chen, Z.H. A method for state-of-charge estimation of lifepo4 batteries based on a dual-circuit state observer. J. Power Sources 2015, 296, 23–29. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.Y.; Yu, Q.Q.; He, H.W.; Sun, F.C. Critical review on the battery state of charge estimation methods for electric vehicles. IEEE Access 2018, 6, 1832–1843. [Google Scholar] [CrossRef]
- Li, Z.; Huang, J.; Liaw, B.Y.; Zhang, J.B. On state-of-charge determination for lithium-ion batteries. J. Power Sources 2017, 348, 281–301. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Ouyang, M.G.; Han, X.B.; Lu, L.G.; Li, J.Q. Investigating the error sources of the online state of charge estimation methods for lithium-ion batteries in electric vehicles. J. Power Sources 2018, 377, 161–188. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.Z.; He, H.W.; Zhou, X.; Pecht, M.G. A double-scale, particle-filtering, energy state prediction algorithm for lithium-ion batteries. IEEE Trans. Ind. Electron. 2018, 65, 1526–1538. [Google Scholar] [CrossRef]
- Wang, Y.J.; Zhang, C.B.; Chen, Z.H.; Xie, J.; Zhang, X. A novel active equalization method for lithium-ion batteries in electric vehicles. Appl. Energy 2015, 145, 36–42. [Google Scholar] [CrossRef]
- Lu, L.G.; Han, X.B.; Li, J.Q.; Hua, J.F.; Ouyang, M.G. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Barillas, J.K.; Li, J.H.; Gunther, C.; Danzer, M.A. A comparative study and validation of state estimation algorithms for Li-ion batteries in battery management systems. Appl. Energy 2015, 155, 455–462. [Google Scholar] [CrossRef]
- Li, Y.W.; Wang, C.; Gong, J.F. A wavelet transform-adaptive unscented kalman filter approach for state of charge estimation of LiFePo4 battery. Int. J. Energy Res. 2018, 42, 587–600. [Google Scholar] [CrossRef]
- Yang, F.F.; Xing, Y.J.; Wang, D.; Tsui, K.L. A comparative study of three model-based algorithms for estimating state-of-charge of lithium-ion batteries under a new combined dynamic loading profile. Appl. Energy 2016, 164, 387–399. [Google Scholar] [CrossRef]
- Hu, X.S.; Li, S.B.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Liu, X.T.; He, Y.; Zheng, X.X.; Zhang, J.F.; Zeng, G.J. A new state-of-charge estimation method for electric vehicle lithium-ion batteries based on multiple input parameter fitting model. Int. J. Energy Res. 2017, 41, 1265–1276. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.Q.; Wang, J.; Zhao, P.J.; Kang, J.Q.; Yan, F.; Du, C.Q. Correlation between the model accuracy and model-based SOC estimation. Electrochim. Acta 2017, 228, 146–159. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.J.; Sun, T. A comparative study of different equivalent circuit models for estimating state-of-charge of lithium-ion batteries. Electrochim. Acta 2018, 259, 566–577. [Google Scholar] [CrossRef]
- Mesbahi, T.; Khenfri, F.; Rizoug, N.; Chaaban, K.; Bartholomeus, P.; Le Moigne, P. Dynamical modeling of Li-ion batteries for electric vehicle applications based on hybrid Particle Swarm-Nelder-Mead (PSO-NM) optimization algorithm. Electr. Power Syst. Res. 2016, 131, 195–204. [Google Scholar] [CrossRef]
- Dai, H.F.; Xu, T.J.; Zhu, L.T.; Wei, X.Z.; Sun, Z.C. Adaptive model parameter identification for large capacity Li-ion batteries on separated time scales. Appl. Energy 2016, 184, 119–131. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl. Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Holland, J.H. Building blocks, cohort genetic algorithms, and hyperplane-defined functions. Evol. Comput. 2000, 8, 373–391. [Google Scholar] [CrossRef] [PubMed]
- Ferreira, K.M.; de Queiroz, T.A. Two effective simulated annealing algorithms for the location-routing problem. Appl. Soft Comput. 2018, 70, 389–422. [Google Scholar] [CrossRef]
- Bratton, D.; Kennedy, J. Defining a standard for particle swarm optimization. In Proceedings of the 2007 IEEE Swarm Intelligence Symposium, Honolulu, HI, USA, 1–5 April 2007; p. 120. [Google Scholar]
- Wei, J.; Dong, G.; Chen, Z.; Kang, Y. System state estimation and optimal energy control framework for multicell lithium-ion battery system. Appl. Energy 2017, 187, 37–49. [Google Scholar] [CrossRef]
- Li, Y.W.; Wang, C.; Gong, J.F. A combination kalman filter approach for State of Charge estimation of lithium-ion battery considering model uncertainty. Energy 2016, 109, 933–946. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.G.; Lu, L.G.; Li, J.Q.; Feng, X.N. The co-estimation of state of charge, state of health, and state of function for lithium-ion batteries in electric vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Wang, Y.J.; Zhang, C.B.; Chen, Z.H. On-line battery state-of-charge estimation based on an integrated estimator. Appl. Energy 2017, 185, 2026–2032. [Google Scholar] [CrossRef]
- Fotouhi, A.; Auger, D.J.; Propp, K.; Longo, S. Lithium-sulfur battery state-of-charge observability analysis and estimation. IEEE Trans. Power Electron. 2018, 33, 5847–5859. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nominal Capacity (Ah) | Nominal Voltage (V) | Lower Cut-Off Voltage (V) | Upper Cut-Off Voltage (V) | Maximum Charge Current (A) |
|---|---|---|---|---|
| 32.5 | 3.75 | 2.5 | 4.15 | 65 |
| Models | Equations |
|---|---|
| nRC | |
| nRCH | |
| PNGV |
| Method Type | Algorithm Name | Inspiration | Year of Proposal |
|---|---|---|---|
| Nonlinear programming | Find minimum of constrained nonlinear (FMIN) | N/A | 1951 |
| Evolution-based | Genetic Algorithm (GA) [20,24] | Biological evolution | 1992 |
| Physics-based | Simulated annealing algorithm (SA) [25] | Solid annealing | 1983 |
| Swarm-based | Particle Swarm optimization (PSO) [26] | Bird flock | 1995 |
| Nature-inspired | Moth-flame optimization (MFO) [23] | Moth | 2015 |
| VS | S | M | L | VL | ||
|---|---|---|---|---|---|---|
| N | VL | L | M | S | VS | |
| Z | L | M | S | VS | VS | |
| P | M | S | S | VS | VS | |
| Case Name | Describe | Parameters Setting |
|---|---|---|
| Case A | The influence of initial SOC error () on fuzzy algorithm | , , , , |
| Case B | The influence of model error () on fuzzy algorithm | , , , , ; |
| Case C | The influence of voltage measurement error () on fuzzy algorithm | , , , , |
| Case D | The influence of current measurement error () on fuzzy algorithm | , , , , |
| Case E | The influence of the SOH on fuzzy algorithm. | , , , , |
| Case F | The influence of SOC–OCV curve error () on fuzzy algorithm. | , , , |
| SOC Estimation Algorithm | Time (s) |
|---|---|
| AH | 0.0479 |
| EKF | 65.8570 |
| Fuzzy fusion | 65.8793 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, X.; Qiao, D.; Zheng, Y.; Zhou, L. A Fuzzy State-of-Charge Estimation Algorithm Combining Ampere-Hour and an Extended Kalman Filter for Li-Ion Batteries Based on Multi-Model Global Identification. Appl. Sci. 2018, 8, 2028. https://doi.org/10.3390/app8112028
Lai X, Qiao D, Zheng Y, Zhou L. A Fuzzy State-of-Charge Estimation Algorithm Combining Ampere-Hour and an Extended Kalman Filter for Li-Ion Batteries Based on Multi-Model Global Identification. Applied Sciences. 2018; 8(11):2028. https://doi.org/10.3390/app8112028
Chicago/Turabian StyleLai, Xin, Dongdong Qiao, Yuejiu Zheng, and Long Zhou. 2018. "A Fuzzy State-of-Charge Estimation Algorithm Combining Ampere-Hour and an Extended Kalman Filter for Li-Ion Batteries Based on Multi-Model Global Identification" Applied Sciences 8, no. 11: 2028. https://doi.org/10.3390/app8112028