Figure 1.
A schematic of a non-uniform shaft with transverse cracks, the cross-section varies with the location of x, as shown in (a), the shaft is divided into n + 1 segments by n transverse cracks, as shown in (b).
Figure 1.
A schematic of a non-uniform shaft with transverse cracks, the cross-section varies with the location of x, as shown in (a), the shaft is divided into n + 1 segments by n transverse cracks, as shown in (b).
Figure 2.
Three typical crack modes, (a) is the opening mode (Mode I), (b) is the edge-sliding mode (Mode II) and (c) is the tearing mode (Mode III).
Figure 2.
Three typical crack modes, (a) is the opening mode (Mode I), (b) is the edge-sliding mode (Mode II) and (c) is the tearing mode (Mode III).
Figure 3.
A schematic of the transverse crack, (a) is the free body diagram and (b) is the section view of the crack.
Figure 3.
A schematic of the transverse crack, (a) is the free body diagram and (b) is the section view of the crack.
Figure 4.
The rig built up for the experiments.
Figure 4.
The rig built up for the experiments.
Figure 5.
The transverse crack in the non-uniform shaft.
Figure 5.
The transverse crack in the non-uniform shaft.
Figure 6.
Numerical propagation constants derived from three different modes, (a) is derived with Mode I, (b) is derived with Mode II and (c) is derived with Mode III.
Figure 6.
Numerical propagation constants derived from three different modes, (a) is derived with Mode I, (b) is derived with Mode II and (c) is derived with Mode III.
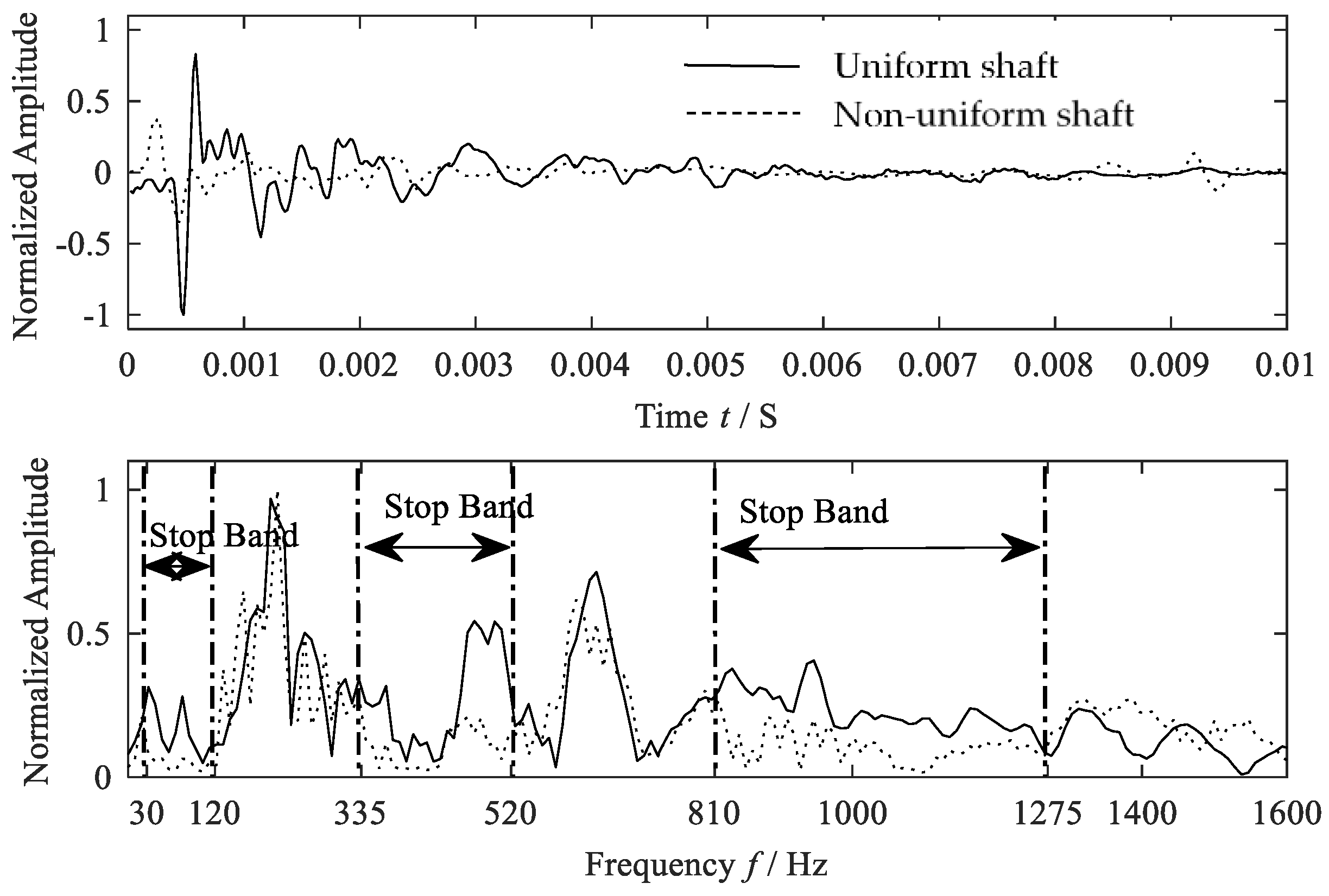
Figure 7.
Experimental Stop Bands derived by spectrum comparison.
Figure 7.
Experimental Stop Bands derived by spectrum comparison.
Figure 8.
Numerical propagation constants derived from different crack locations.
Figure 8.
Numerical propagation constants derived from different crack locations.
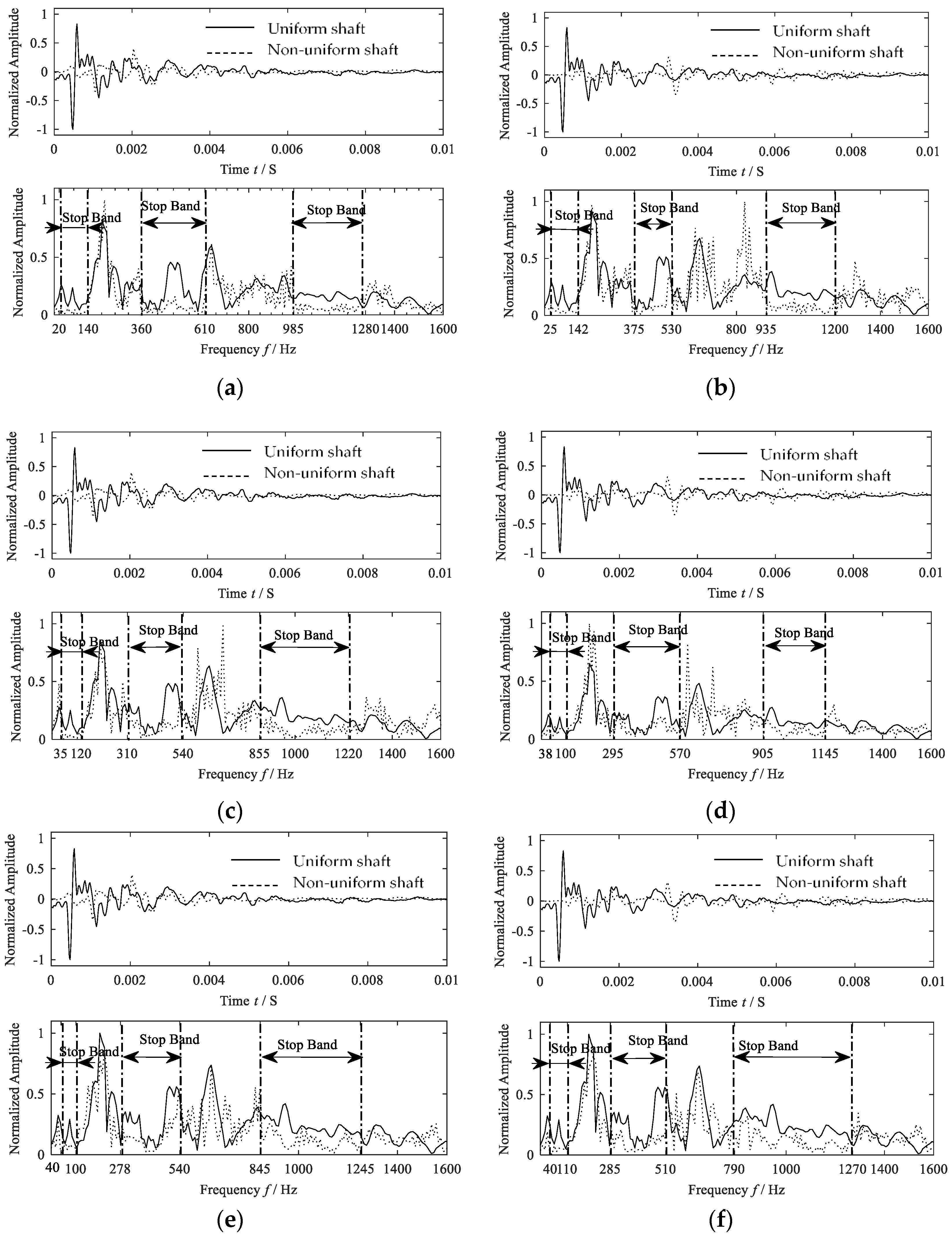
Figure 9.
Experimental Stop Bands derived at different crack locations, where (a) is for location 0.1L, (b) is for location 0.2L, (c) is for location 0.4L, (d) is for location 0.5L, (e) is for location 0.6L, (f) is location 0.7L, (g) is for location 0.8L and (h) is for location 0.9L.
Figure 9.
Experimental Stop Bands derived at different crack locations, where (a) is for location 0.1L, (b) is for location 0.2L, (c) is for location 0.4L, (d) is for location 0.5L, (e) is for location 0.6L, (f) is location 0.7L, (g) is for location 0.8L and (h) is for location 0.9L.
Figure 10.
Numerical propagation constants derived from different crack depths.
Figure 10.
Numerical propagation constants derived from different crack depths.
Figure 11.
Experimental stopbands derived from different crack depth, where (a) is for the case a/Rc = 0.1, (b) is for the case a/Rc = 0.2, (c) is for the case a/Rc = 0.3 and (d) is for the case a/Rc = 0.4.
Figure 11.
Experimental stopbands derived from different crack depth, where (a) is for the case a/Rc = 0.1, (b) is for the case a/Rc = 0.2, (c) is for the case a/Rc = 0.3 and (d) is for the case a/Rc = 0.4.
Figure 12.
Numerical propagation constants derived from different rotating speeds.
Figure 12.
Numerical propagation constants derived from different rotating speeds.
Figure 13.
Experimental propagation characteristics derived from different rotating speeds, where (a) is for 0 Hz, (b) is for 10 Hz, (c) is for 20 Hz, (d) is for 30 Hz and (e) is for 40 Hz.
Figure 13.
Experimental propagation characteristics derived from different rotating speeds, where (a) is for 0 Hz, (b) is for 10 Hz, (c) is for 20 Hz, (d) is for 30 Hz and (e) is for 40 Hz.
Table 1.
The numerical and experiment scheme.
Table 1.
The numerical and experiment scheme.
| | Location of the Crack (xc) | Depth of the Crack (a) | RPM (Hz) |
|---|
| Part 1 | 0.3L | 0.5Rc | 50 |
| Part 2 | 0.3L | 0.1Rc, 0.2Rc, 0.3Rc, 0.4Rc, 0.5Rc | 50 |
| Part 3 | 0.1L, 0.2L, 0.3L, 0.4L, 0.5L, 0.6L, 0.7L, 0.8L, 0.9L | 0.5Rc | 50 |
| Part 4 | 0.3L | 0.5Rc | 0, 10, 20, 30, 40, 50 |
Table 2.
Numerical stopbands derived from different crack modes.
Table 2.
Numerical stopbands derived from different crack modes.
| Crack Mode | Stopbands (Hz) |
|---|
| Mode I | [106, 138], [492, 546], [1100, 1261] |
| Mode II | [110, 141], [499, 564], [1157, 1261] |
| Mode III | [34, 124], [346, 516], [826, 1261] |
Table 3.
Numerical stopbands derived at different crack locations.
Table 3.
Numerical stopbands derived at different crack locations.
| Locations | Stopbands (Hz) |
|---|
| 0.1L | [26, 148], [352, 592], [976, 1284] |
| 0.2L | [30, 142], [384, 526], [926, 1194] |
| 0.3L | [34, 124], [346, 516], [826, 1261] |
| 0.4L | [36, 116], [316, 542], [848, 1220] |
| 0.5L | [38, 106], [288, 562], [896, 1140] |
| 0.6L | [40, 106], [278, 540], [842, 1226] |
| 0.7L | [40, 112], [282, 502], [790, 1262] |
| 0.8L | [42, 122], [290, 496], [798, 1188] |
| 0.9L | [44, 136], [294, 544], [830, 1210] |
Table 4.
Experimental stopbands derived from different crack locations.
Table 4.
Experimental stopbands derived from different crack locations.
| Locations | Stopbands (Hz) |
|---|
| 0.1L | [20, 140], [360, 610], [985, 1280] |
| 0.2L | [25, 142], [375, 530], [935, 1200] |
| 0.3L | [30, 120], [335, 520], [810, 1275] |
| 0.4L | [35, 120], [310, 540], [855, 1220] |
| 0.5L | [38, 100], [295, 570], [905, 1145] |
| 0.6L | [40, 100], [278, 540], [845, 1245] |
| 0.7L | [40, 110], [285, 510], [790, 1270] |
| 0.8L | [45, 120], [290, 500], [805, 1195] |
| 0.9L | [50, 130], [295, 550], [830, 1220] |
Table 5.
Numerical Stopbands derived at different crack depths.
Table 5.
Numerical Stopbands derived at different crack depths.
| Depth (a/Rc) | Stopbands (Hz) |
|---|
| 0.1 | [102, 134], [480, 534], [1060, 1261] |
| 0.2 | [80, 126], [412, 518], [918, 1261] |
| 0.3 | [58, 124], [372, 516], [860, 1261] |
| 0.4 | [42, 124], [354, 516], [838, 1261] |
| 0.5 | [34, 124], [346, 516], [828, 1261] |
Table 6.
Experimental stopbands derived at different crack depths.
Table 6.
Experimental stopbands derived at different crack depths.
| Depth (a/Rc) | Stopbands (Hz) |
|---|
| 0.1 | [455, 540], [1000, 1270] |
| 0.2 | [421, 522], [920, 1270] |
| 0.3 | [42, 143], [337, 528], [880, 1270] |
| 0.4 | [35, 130], [335, 525], [850, 1275] |
| 0.5 | [30, 120], [335, 520], [810, 1275] |
Table 7.
Numerical stopbands derived from different rotating speeds.
Table 7.
Numerical stopbands derived from different rotating speeds.
| RPM | Stopbands (Hz) |
|---|
| 0 Hz | [0, 71], [285, 455], [743, 1181] |
| 10 Hz | [0, 82], [297, 467], [758, 1196] |
| 20 Hz | [0, 91], [309, 479], [772, 1210] |
| 30 Hz | [8, 100], [322, 492], [787, 1225] |
| 40 Hz | [23, 113], [332, 502], [808, 1243] |
| 50 Hz | [33, 124], [346, 516], [826, 1261] |
Table 8.
Experimental stopbands derived from different rotating speeds.
Table 8.
Experimental stopbands derived from different rotating speeds.
| RPM | Stopbands (Hz) |
|---|
| 0 Hz | [0, 50], [270, 440], [735, 1175] |
| 10 Hz | [0, 75], [280, 450], [750, 1185] |
| 20 Hz | [0, 80], [305, 480], [760, 1210] |
| 30 Hz | [0, 95], [325, 500], [790, 1235] |
| 40 Hz | [18, 110], [330, 510], [805, 1250] |
| 50 Hz | [30, 120], [335, 520], [810, 1275] |


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}