Deep Learning-Based Damage, Load and Support Identification for a Composite Pipeline by Extracting Modal Macro Strains from Dynamic Excitations




Abstract
:Featured Application
Abstract
1. Introduction
2. Modal Macro Strain (MMS)-Based Monitoring Strategy
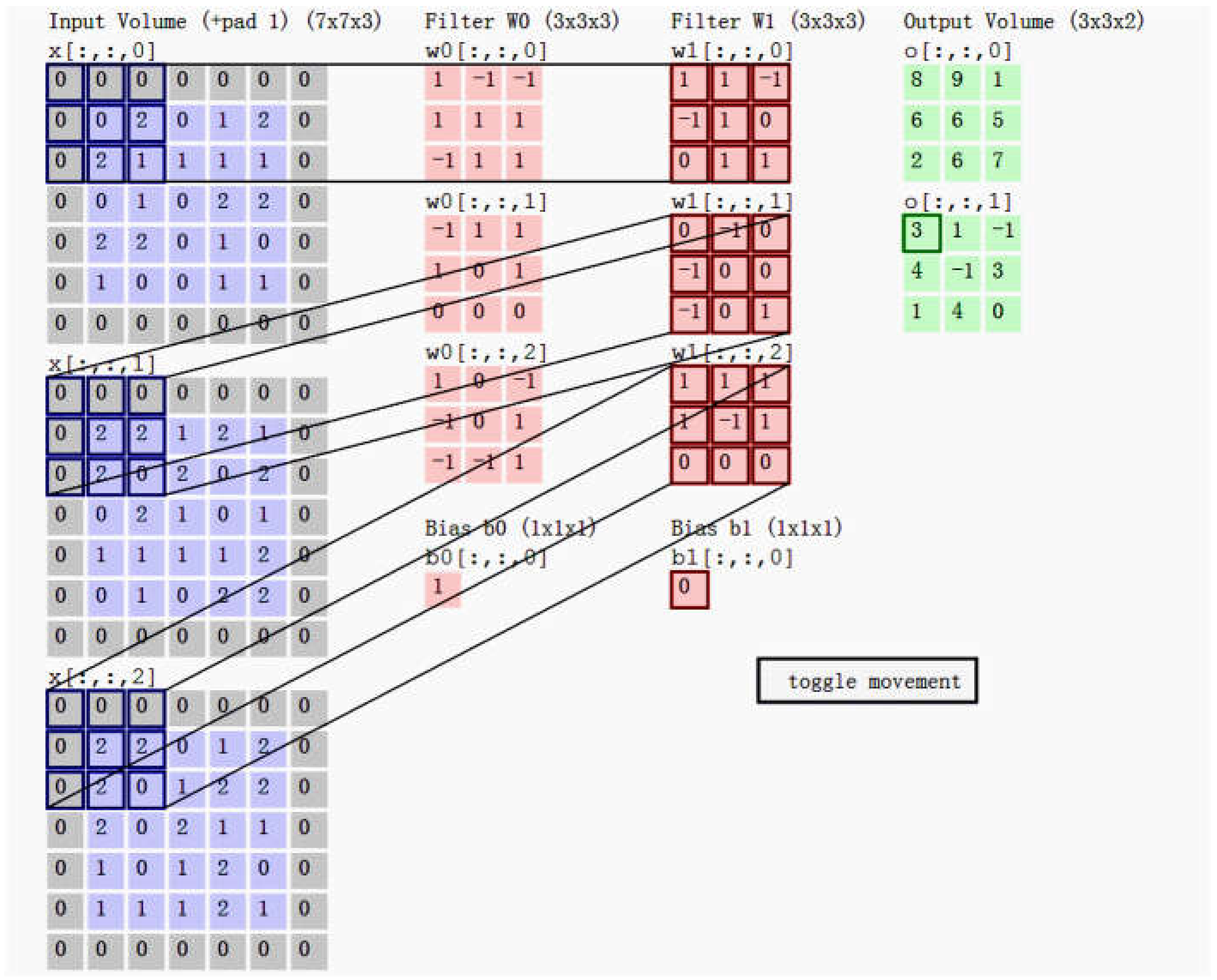
3. Convolutional Neural Networks (CNN)
3.1. Convolution Layers
3.2. Gradients in the Convolution Layers
3.3. Sub-Sampling Layers
3.4. Gradients in the Sub-Sampling Layers
3.5. Learning Combinations of Feature Maps
3.6. Enforcing Sparse Combinations
- (1)
- Depth: the number of neurons (filters), determining the depth,
- (2)
- Stride: the number of stride covering through the data,
- (3)
- Zero padding: Supplement a few zeros to make the window more from the initial location to the end of the dataset.
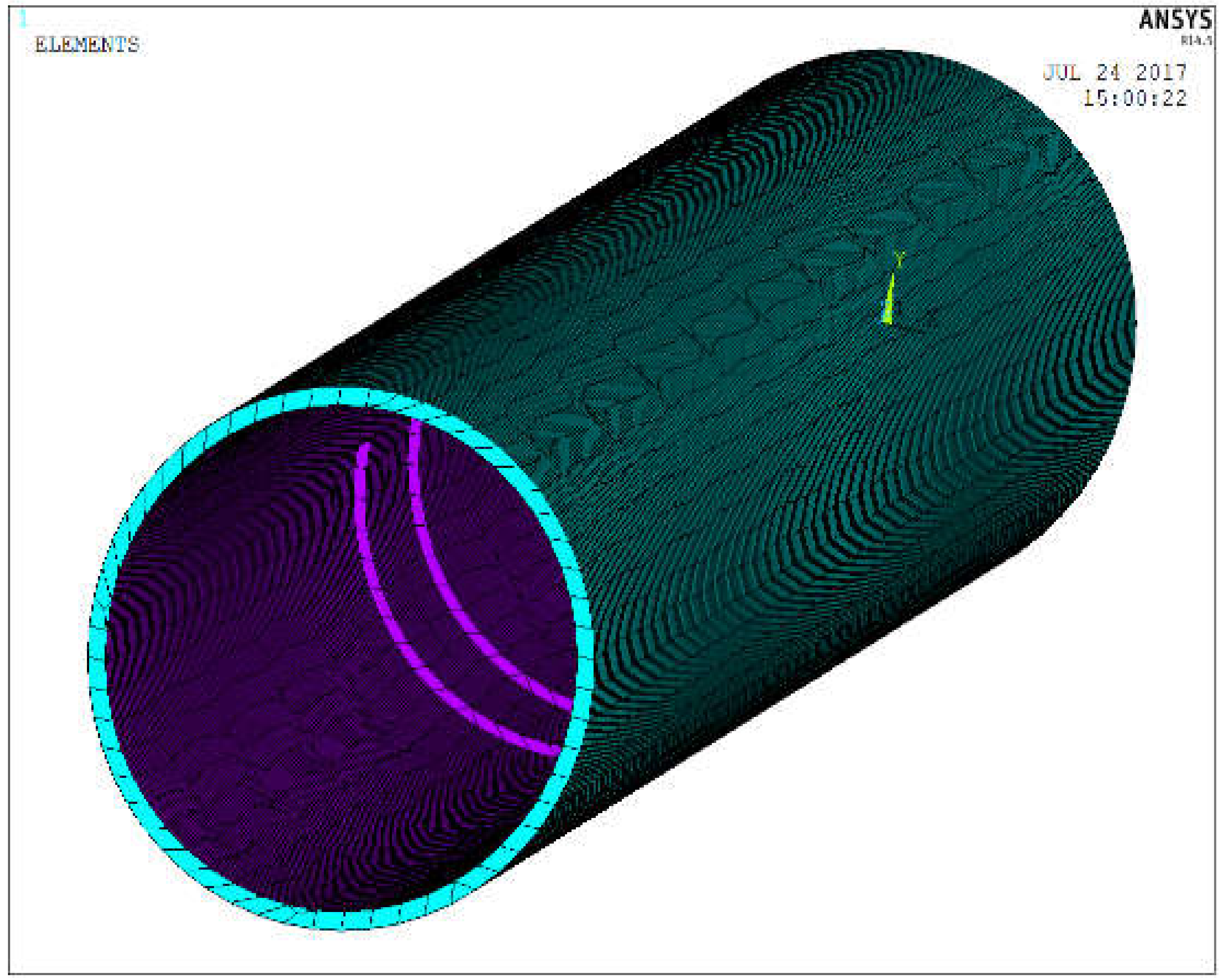
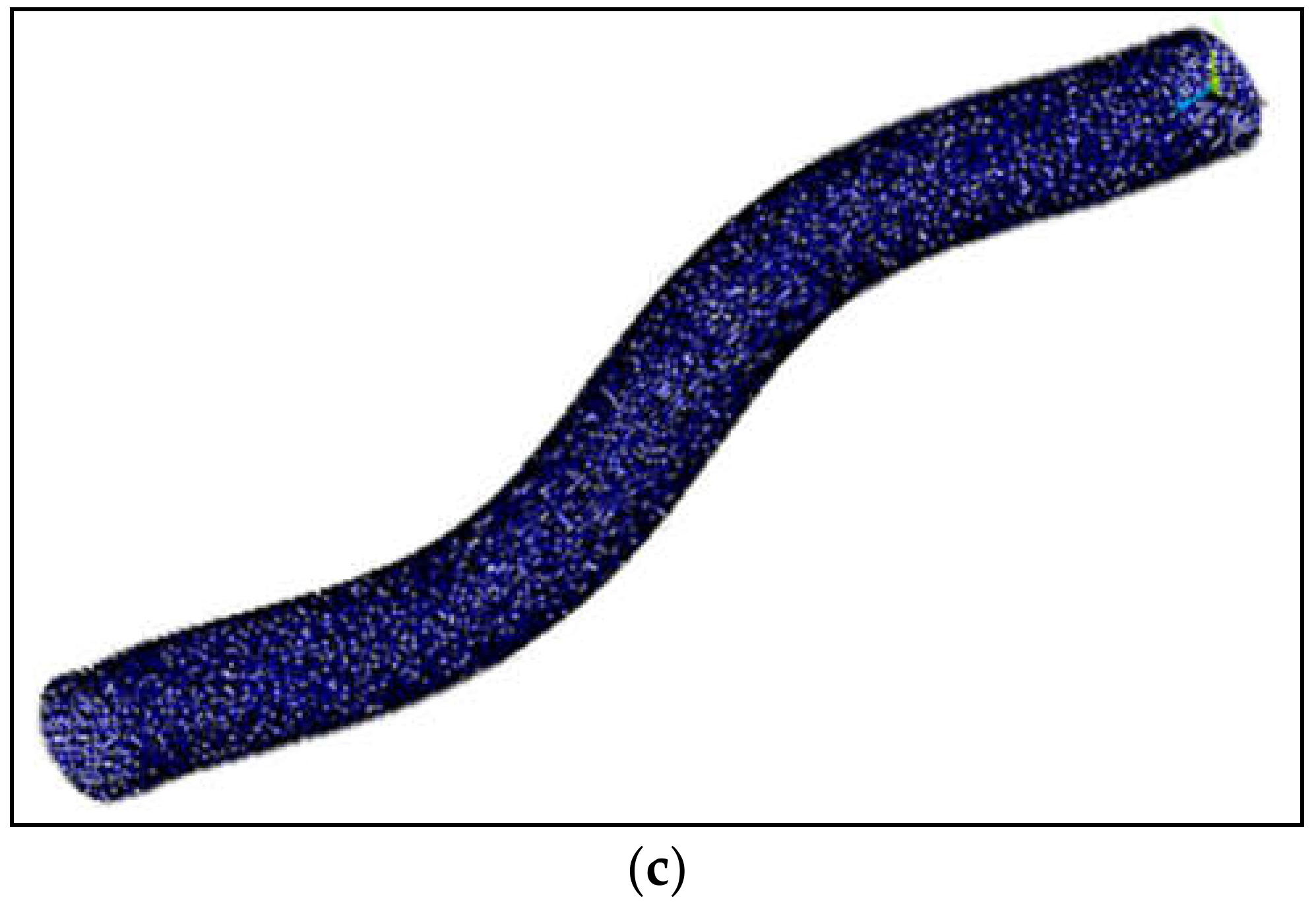
4. Pipeline System Modeling
- D1, D2: Same damage extent but different locations
- D3: Larger damage extent than D1 and D2 (D1 + D2)
4.1. Modal Analysis of the Pipeline
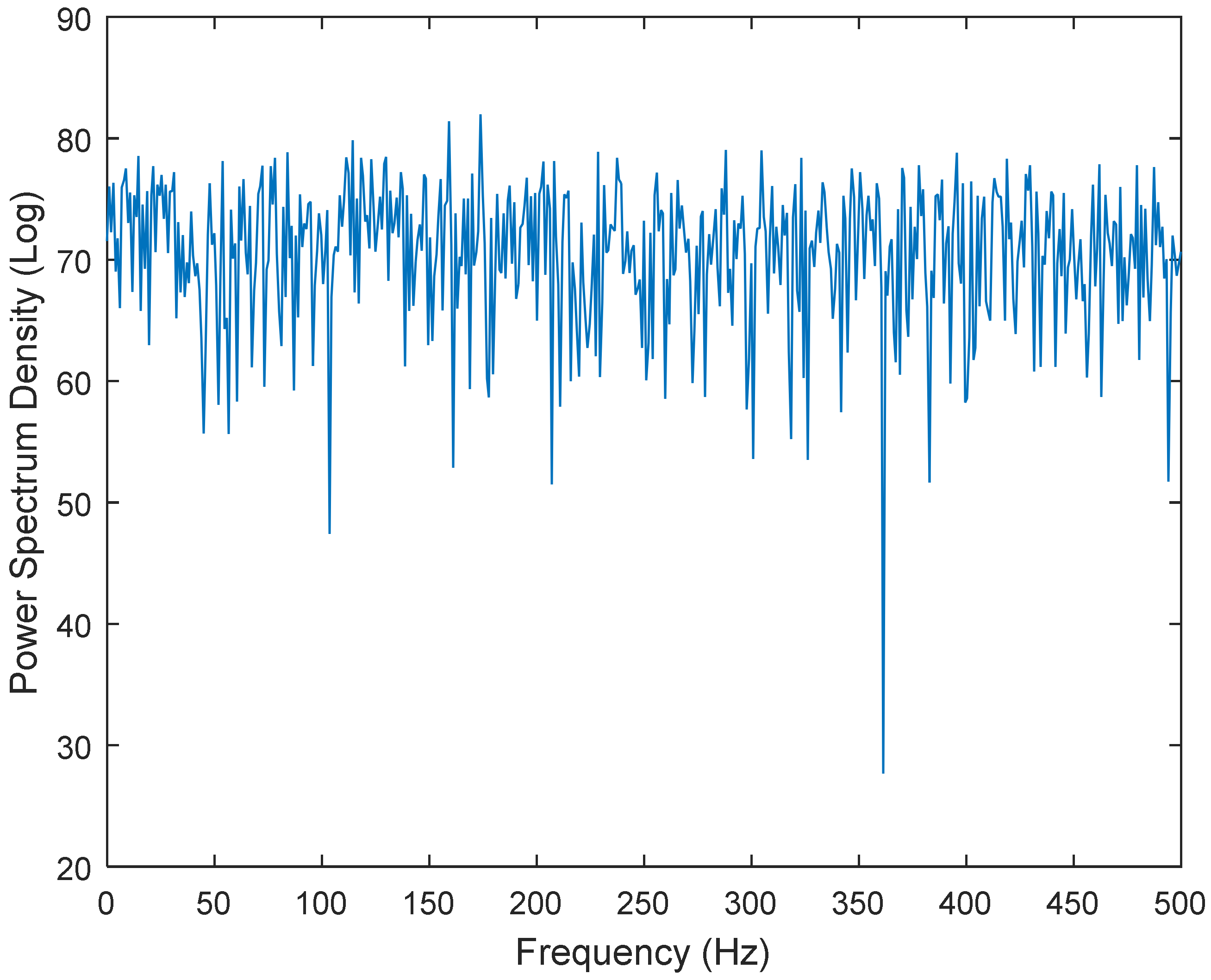
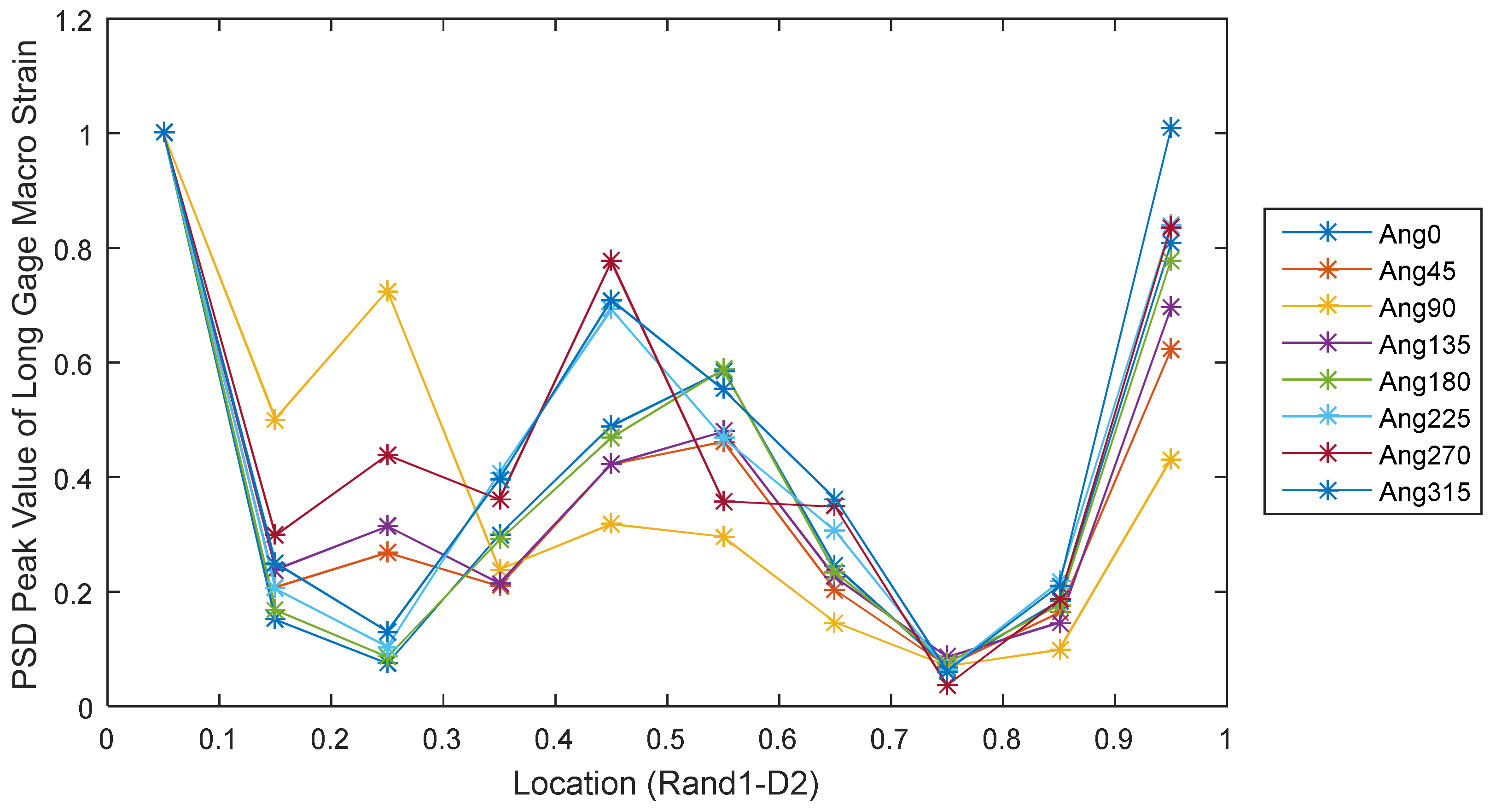
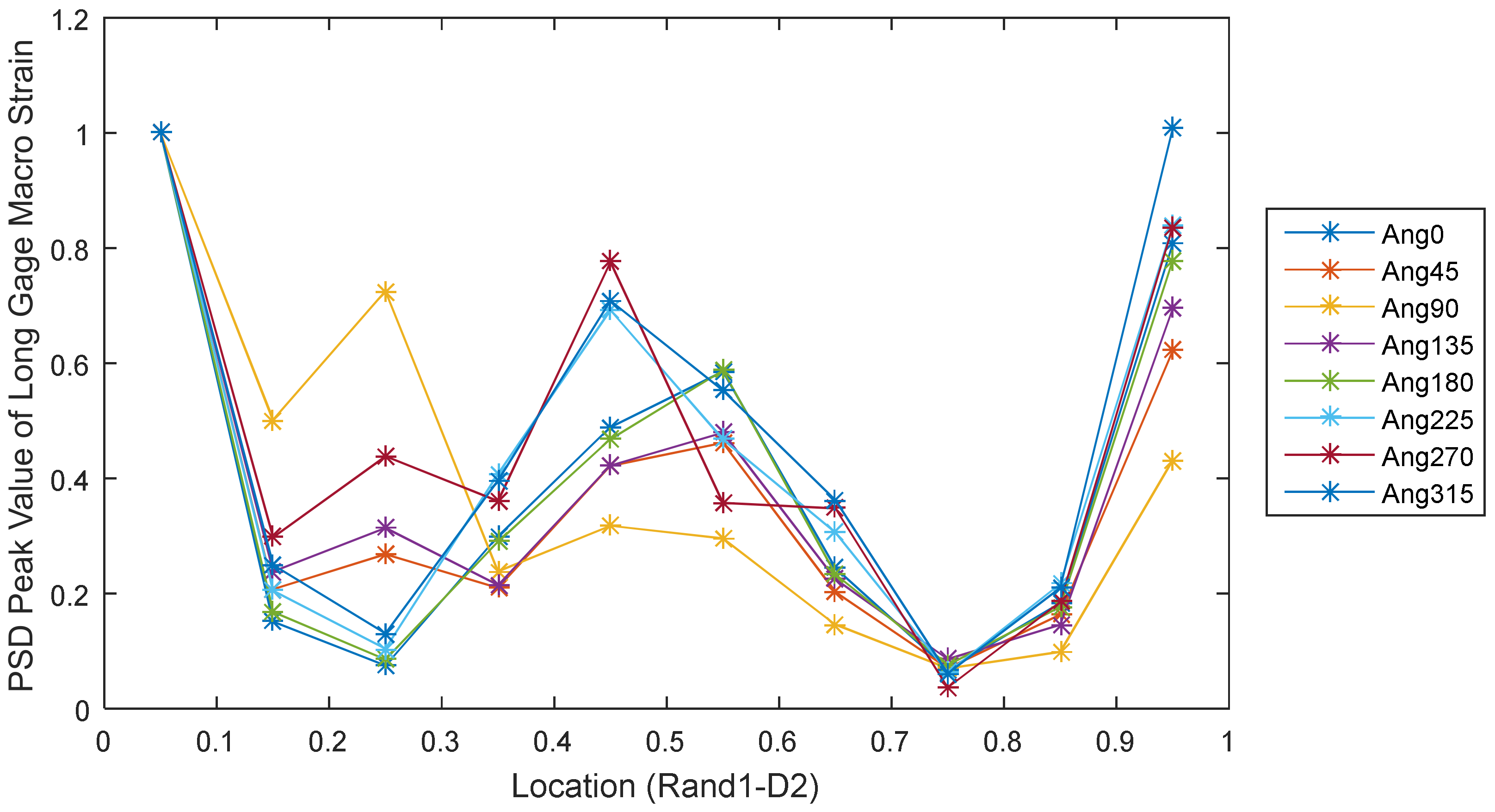
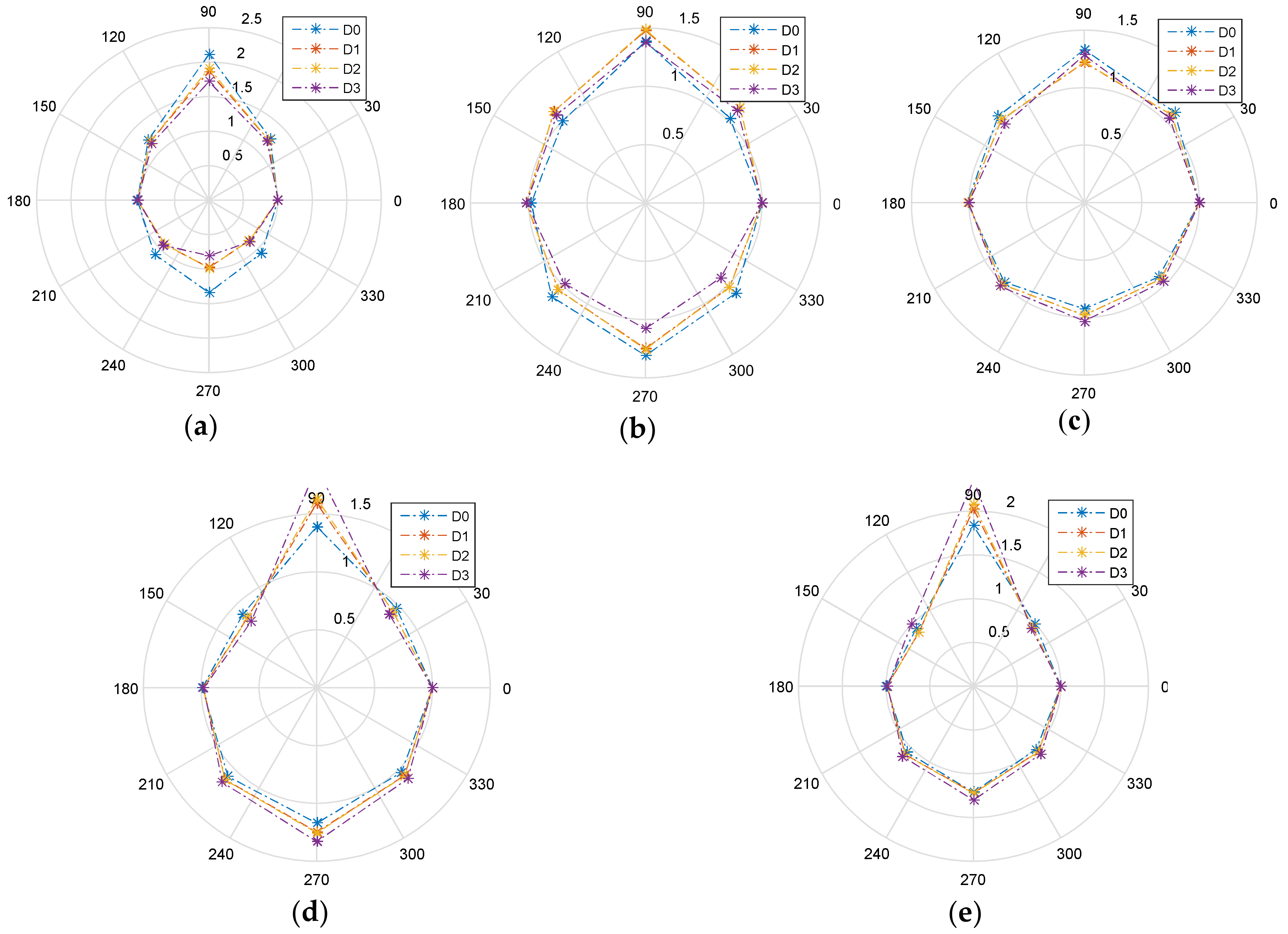
4.2. Identification Using Modal Macro Strain Method
Characteristics of MMS Plot of Cross Section at the Loading Point
4.3. Damage, Load and Support Identification Using CNN
- ▪
- Cnnsetup: Each feature map is the number of feature map multiplied by the size of patch map for convolution. By moving a kernel window in the feature map, each neuron of feature map is traversed. The kernel window is composed of elements with the size of kernelsize × kernelsize. Each element is an independent weight, so there are kernelsize × kernelsize weights that need to be learned. Due to weight sharing, for the same feature map layer, the kernel window with the size of kernelsize × kernelsize has the same weights, which means weights are only determined by the kernel window. For different feature maps, the kernel windows are different, which means the weights are different.
- ▪
- cnntrain: First reorder the sample, and randomly train and calculate the weights of network input and output. Then calculate the derivative of the error with respect to weights by the back propagation (BP) algorithm. Weight updating method will be used to update the network.
- ▪
- Cnnff: Use the neural network to predict the input vector. First reorder the samples and then randomly train them. Samples are input to the network and are mapped for prediction. For each feature map of the last layer, the size of the feature map after convolution is: (feature map width-conv kernel width + 1) × (feature map height-conv kernel height + 1).
- ▪
- cnnbp: The convolution layer is used for up-sampling and subsampling layer is used for down-sampling. The weights (size is onum × fvnum) between the last layer and the output neurons; where onum is the number of labels, and fvnum is the number of output neurons at the last layer.
- ▪
- Cnnapplygrads: The Cnnapplygrads is used for weight updating. The training dataset is 256 × 256 × 6000, testing dataset is 256 × 256 × 800, labeled training dataset is 7 × 6000, and the labeled testing dataset is 7 × 800. The construction of the conventional neural network is 6c–2s–12c–2s (c: convolution layer, s: sub sampling layer), learning efficiency Alpha = 1, Batchsize = 50, and Numepoch = 1.
- (1)
- True positive rate (TPR) = TP/(TP + FN),
- (2)
- True negative rate (TNR) = TN/(TN + FP),
- (3)
- False positive rate (FPR) = FP/(FP + TN),
- (4)
- False negative rate (FNR) = FN/(TP + FN).
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lynch, J.P.; Farrar, C.R.; Michaels, J.E. Structural health monitoring: Technological advances to practical implementations. Proc. IEEE 2016, 104, 1508–1512. [Google Scholar] [CrossRef]
- Ying, Z.; Mohammad, N.; Seyed, B.B.; Altabey, W.A. Mode shape based damage identification for a reinforced concrete beam using wavelet coefficient differences and multi-resolution analysis. J. Struct. Control Health Monit. 2017, 25, 1–41. [Google Scholar] [CrossRef]
- Ying, Z.; Mohammad, N.; Altabey, W.A. Damage detection for a beam under transient excitation via three different algorithms. J. Struct. Eng. Mech. 2017, 63, 803–817. [Google Scholar] [CrossRef]
- Kesavan, A.; John, S.; Herszberg, I. Strain-based structural health monitoring of complex composite structures. J. Struct. Health Monit. 2008, 7, 203–213. [Google Scholar] [CrossRef]
- Altabey, W.A. An exact solution for mechanical behavior of BFRP Nano-thin films embedded in NEMS. J. Adv. Nano Res. 2017, 5, 337–357. [Google Scholar] [CrossRef]
- Shen, S.; Wu, Z.; Yang, C.; Wan, C.; Tang, Y.; Wu, G. An improved conjugated beam method for deformation monitoring with a distributed sensitive fiber optic sensor. J. Struct. Health Monit. 2010, 9, 361–378. [Google Scholar] [CrossRef]
- Shen, S.; Wu, Z.; Lin, M. Distributed settlement and lateral displacement monitoring for shield tunnel based on an improved conjugated beam method. J. Adv. Struct. Eng. 2013, 16, 1411–1425. [Google Scholar] [CrossRef]
- Wu, B.; Wu, G.; Yang, C.; He, Y. Damage identification and bearing capacity evaluation of bridges based on distributed long-gauge strain envelope line under moving vehicle loads. J. Intell. Mater. Syst. Struct. 2016, 27, 2344–2358. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, H.; Yang, C. Development and performance evaluation of non-slippage optical fiber as Brillouin scattering-based distributed sensors. J. Struct. Health Monit. 2010, 9, 413–431. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Y.H.; Xiao, X.L.; Yan, H.; Shi, G.S.; Wang, Q.R. A fiber-sensor-based long-distance safety monitoring system for buried oil pipeline. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, Sanya, China, 6–8 April 2008; Volume 6, pp. 451–456. [Google Scholar] [CrossRef]
- Wu, H.; Sun, Z.; Qian, Y.; Zhang, T.; Rao, Y. A hydrostatic leak test for water pipeline by using distributed optical fiber vibration sensing system. In Proceedings of the Fifth Asia-Pacific Optical Sensors Conference, International Society for Optics and Photonics, Jeju, Korea, 1 July 2015; Volume 1, p. 9655 (965543). [Google Scholar]
- Ying, Z.; Mohammad, N.; Altabey, W.A.; Zhishen, W. Fatigue Damage Identification for Composite Pipeline Systems Using Electrical Capacitance Sensors. J. Smart Mater. Struct. 2018, 27, 085023. [Google Scholar] [CrossRef]
- Tang, Y.; Wu, Z.; Yang, C.; Wu, G.; Wan, C. A model-free damage identification method for flexural structures using dynamic measurements from distributed long-gauge macro-strain sensors. J. Intell. Mater. Syst. Struct. 2014, 25, 1614–1630. [Google Scholar] [CrossRef]
- Hong, W.; Wu, Z.; Yang, C.; Wan, C.; Wu, G. Investigation on the damage identification of bridges using distributed long-gauge dynamic macrostrain response under ambient excitation. J. Intell. Mater. Syst. Struct. 2012, 23, 85–103. [Google Scholar] [CrossRef]
- Hong, W.; Zhang, J.; Wu, G.; Wu, Z. Comprehensive comparison of macro-strain mode and displacement mode based on different sensing technologies. Mech. Syst. Signal Process. 2015, 50, 563–579. [Google Scholar] [CrossRef]
- Hong, W.; Wu, Z.; Yang, C.; Wu, G.; Zhang, Y. Finite element model updating of flexural structures based on modal parameters extracted from dynamic distributed macro-strain responses. J. Intell. Mater. Syst. Struct. 2015, 26, 201–218. [Google Scholar] [CrossRef]
- Zhang, J.; Hong, W.; Tang, Y.; Yang, C.; Wu, G.; Wu, Z. Structural health monitoring of a steel stringer bridge with area sensing. J. Struct. Infrastruct. Eng. 2014, 10, 1049–1058. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. J. Adv. Neural Inf. Process. Syst. 2012, 1097–1105. [Google Scholar] [CrossRef]
- Bouvrie, J. Notes on Convolutional Neural Networks; Center for Biological Learning, Department of Brain and Cognitive Sciences, Massachusetts Institute of Technology: Cambridge, MA, USA, 2006. [Google Scholar]
- Altabey, W.A. Free vibration of basalt fiber reinforced polymer (FRP) laminated variable thickness plates with intermediate elastic support using finite strip transition matrix (FSTM) method. J. Vibroeng. 2017, 19, 2873–2885. [Google Scholar] [CrossRef]
- Altabey, W.A. Prediction of natural frequency of basalt fiber reinforced polymer (FRP) laminated variable thickness plates with intermediate elastic support using artificial neural networks (ANNs) method. J. Vibroeng. 2017, 19, 3668–3678. [Google Scholar] [CrossRef]
- Altabey, W.A. High performance estimations of natural frequency of basalt FRP laminated plates with intermediate elastic support using response surfaces method. J. Vibroeng. 2018, 20, 1099–1107. [Google Scholar] [CrossRef] [Green Version]
- Al-Tabey, W.A. Vibration analysis of laminated composite variable thickness plate using finite strip transition matrix technique. In MATLAB Verifications MATLAB-Particular for Engineer; Kelly, B., Ed.; InTech: West Palm Beach, FL, USA, 2014; Volume 21, pp. 583–620. ISBN 980–953-307-1128-8. [Google Scholar]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Guo, J.; Xie, X.; Bie, R.; Sun, L. Structural health monitoring by using a sparse coding-based deep learning algorithm with wireless sensor networks. J. Pers. Ubiquitous Comput. 2014, 18, 1977–1987. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep learning-based crack damage detection using convolutional neural networks. J. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Pnevmatikos, N.G.; Blachowski, B.; Hatzigeorgiou, G.D.; Swiercz, A. Wavelet analysis based damage localization in steel frames with bolted connections. J. Smart Struct. Syst. 2016, 18, 1189–1202. [Google Scholar] [CrossRef]
- Mohammad, N.; Haifegn, W.; Altabey, W.A.; Ahmad, I.H.S. A Modified Wavelet Energy Rate Based Damage Identification Method for Steel Bridges. Int. J. Sci. Technol. Sci. Iran. 2018. [Google Scholar] [CrossRef]
- Pnevmatikos, N.G.; Hatzigeorgiou, G.D. Damage detection of framed structures subjected to earthquake excitation using discrete wavelet analysis. J. Bull. Earthq. Eng. 2017, 15, 227–248. [Google Scholar] [CrossRef]
- Kanarachos, S.; Christopoulos, S.R.; Chroneos, A.; Fitzpatrick, M.E. Detecting anomalies in time series data via a deep learning algorithm combining wavelets, neural networks and Hilbert transform. Expert Syst. Appl. 2017, 85, 292–304. [Google Scholar] [CrossRef]
- Chen, Z.; Deng, S.; Chen, X.; Li, C.; Sanchez, R.V.; Qin, H. Deep neural networks-based rolling bearing fault diagnosis. J. Microelectron. Reliab. 2017, 75, 327–333. [Google Scholar] [CrossRef]
- Jing, L.; Wang, T.; Zhao, M.; Wang, P. An adaptive multi-sensor data fusion method based on deep convolutional neural networks for fault diagnosis of planetary gearbox. J. Sens. 2017, 17, 414. [Google Scholar] [CrossRef]
- Cheng, H.T.; Koc, L.; Harmsen, J.; Shaked, T.; Chandra, T.; Aradhye, H.; Anderson, G.; Corrado, G.; Chai, W.; Ispir, M.; et al. Wide & deep learning for recommender systems. In Proceedings of the 1st Workshop on Deep Learning for Recommender Systems, Boston, MA, USA, 15 September 2016; ACM: New York, NY, USA; pp. 7–10. [Google Scholar]
- Cai, G. Big Data Analytics in Structural Health Monitoring. Doctoral Dissertation, Vanderbilt University, Nashville, TN, USA, 2017. [Google Scholar]
- Liang, Y.; Wu, D.; Liu, G.; Li, Y.; Gao, C.; Ma, Z.J.; Wu, W. Big data-enabled multiscale serviceability analysis for aging bridges. J. Digit. Commun. Netw. 2016, 2, 97–107. [Google Scholar] [CrossRef]
- Ying, Z.; Mohammad, N.; Altabey, W.A.; Naiwei, L. Reliability Evaluation of a Laminate Composite Plate Under Distributed Pressure Using a Hybrid Response Surface method. Int. J. Reliab. Qual. Saf. Eng. 2017, 24, 1750013. [Google Scholar] [CrossRef]
- Altabey, W.A.; Mohammad, N. Detection of fatigue crack in basalt FRP laminate composite pipe using electrical potential change method. J. Phys. Conf. Ser. 2017, 842, 012079. [Google Scholar] [CrossRef]
- Altabey, W.A. Delamination evaluation on basalt FRP composite pipe by electrical potential change. J. Adv. Aircr. Spacecr. Sci. 2017, 4, 515–528. [Google Scholar] [CrossRef]
- Altabey, W.A. EPC method for delamination assessment of basalt FRP pipe: Electrodes number effect. J. Struct. Monit. Maint. 2017, 4, 69–84. [Google Scholar] [CrossRef]
- Altabey, W.A.; Mohammad, N. Monitoring the water absorption in GFRE pipes via an electrical capacitance Sensors. J. Adv. Aircr. Spacecr. Sci. 2018, 5, 411–434. [Google Scholar] [CrossRef]
- Altabey, W.A.; Mohammad, N.; Wang, L. Using ANSYS for Finite Element Analysis: A Tutorial for Engineers, Volume I; Momentum Press: New York, NY, USA, 2018; ISBN 978-1-94708-321-9. [Google Scholar]
- Altabey, W.A.; Mohammad, N.; Wang, L. Using ANSYS for Finite Element Analysis: Dynamic, Probabilistic, Design and Heat, Transfer Analysis, Volume II; Momentum Press: New York, NY, USA, 2018; ISBN 978-1-94708-323-3. [Google Scholar]
- Al-Tabey, W.A. Finite Element Analysis in Mechanical Design Using ANSYS: Finite Element Analysis (FEA) Hand Book For Mechanical Engineers With ANSYS Tutorials; LAP Lambert Academic Publishing: Saarbrucken, Germany, 2012; ISBN 978-3-8454-0479-0. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element Type | EX (Pa) | EY (Pa) | EZ (Pa) | PRXY | PRYZ | PRXZ | GXY (Pa) | GYZ (Pa) | GXZ (Pa) |
|---|---|---|---|---|---|---|---|---|---|
| SHELL181 | 93.5 × 109 | 20× 109 | 20× 109 | 0.28 | 0.3 | 0.28 | 8.5× 109 | 2.35× 109 | 2.35× 109 |
| Frequency Order | D0 (Hz) | D1 (Hz) | D2 (Hz) | D3 (Hz) |
|---|---|---|---|---|
| 1st order (Lateral Bending) | 233.55 | 232.85 | 232.13 | 230.79 |
| 2nd order (Vertical Bending) | 315.62 | 312.67 | 312.64 | 310.11 |
| 3rd order (Torsion) | 824.38 | 822.90 | 822.48 | 820.85 |
| Label | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Case | Support 1 | Support 2 | Excitation | D0 | D1 | D2 | D3 |
| Location | 0–0.1 m | 0.9–1 m | 0.1–0.2 m/0.2–0.3 m | Other Cases | 0.4–0.5 m | 0.5–0.6 m | 0.4–0.5 m/0.5–0.6 m |
| Case | Str1 | Str2 | Str3 | Str4 | Str5 | Str6 | Str7 | Str8 | Str9 | Str10 |
|---|---|---|---|---|---|---|---|---|---|---|
| D0 | label1 | label3 | label3 | label4 | label4 | label4 | label4 | label4 | label4 | label2 |
| D1 | label1 | label3 | label3 | label4 | label5 | label4 | label4 | label4 | label4 | label2 |
| D2 | label1 | label3 | label3 | label4 | label4 | label6 | label4 | label4 | label4 | label2 |
| D3 | label1 | label3 | label3 | label4 | label7 | label7 | label4 | label4 | label4 | label2 |
| Label | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Number | 80 | 80 | 160 | 400 | 20 | 20 | 40 |
| TPR | 75 (93.75%) | 77 (96.25%) | 156 (97.5%) | 388 (97%) | 18 (90%) | 18 (90%) | 37 (92.5%) |
| TNR | 704 (97.78%) | 701 (97.36) | 623 (97.34%) | 379 (94.75%) | 766 (98.21%) | 764 (97.95%) | 748 (98.42%) |
| FPR | 16 (2.22%) | 19 (2.64%) | 17 (2.66%) | 21 (5.25%) | 14 (1.79%) | 16 (2.05%) | 12 (1.58%) |
| FNR | 5 (6.25%) | 3 (3.75%) | 4 (2.5%) | 12 (3%) | 2 (10%) | 2 (10%) | 3 (7.5%) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Noori, M.; Altabey, W.A.; Ghiasi, R.; Wu, Z. Deep Learning-Based Damage, Load and Support Identification for a Composite Pipeline by Extracting Modal Macro Strains from Dynamic Excitations. Appl. Sci. 2018, 8, 2564. https://doi.org/10.3390/app8122564
Zhao Y, Noori M, Altabey WA, Ghiasi R, Wu Z. Deep Learning-Based Damage, Load and Support Identification for a Composite Pipeline by Extracting Modal Macro Strains from Dynamic Excitations. Applied Sciences. 2018; 8(12):2564. https://doi.org/10.3390/app8122564
Chicago/Turabian StyleZhao, Ying, Mohammad Noori, Wael A. Altabey, Ramin Ghiasi, and Zhishen Wu. 2018. "Deep Learning-Based Damage, Load and Support Identification for a Composite Pipeline by Extracting Modal Macro Strains from Dynamic Excitations" Applied Sciences 8, no. 12: 2564. https://doi.org/10.3390/app8122564