3.2.1. State Tracking
To estimate the collision risk, it is necessary to obtain the state estimation of the AUV and dynamic obstacles through state tracking. Currently, almost all state tracking algorithms rely on models for the state estimation, and a good model is worth a large amount of data [
19]. However, a significant challenge in target state tracking is the mismatch between the actual motion states of targets and the tracking motion models. Widely used models include the constant velocity (CV) model, the constant acceleration (CA) model, and the Singer model [
20]. Ref. [
21] proposed an adaptive Gauss model based on the Singer model and conducted theoretical analysis and simulations, demonstrating its excellent tracking performance for underwater targets with different motion patterns. However, this model still faces challenges: due to the constraints of the underwater environment, most underwater targets exhibit weak maneuvering states, with small values for the velocity, acceleration, and acceleration variance. When the targets’ motion state changes significantly, the small acceleration variance causes the model to fail to promptly match the targets’ motion. To achieve an accurate state estimation, fuzzy reasoning methods and the interacting multiple model (IMM) algorithms are introduced to design an improved model.
- 1.
Adaptive Gauss model;
The equations for the target’s motion state and observation are as follows:
where
is the state vector,
is the observation vector,
and
are the state and observation transition matrices,
is the observation matrix, and
and
are the state and observation noise covariance matrices, respectively.
The adaptive Gauss model [
21] characterizes target maneuvering as follows:
where
represents the targets’ maneuvering acceleration;
denotes the mean acceleration;
denotes zero-mean colored acceleration noise with exponential decay;
denotes the target maneuvering frequency;
denotes input white noise with variance
; and
is the acceleration variance.
The model assumes that the acceleration
follows a Gaussian distribution with a probability density function given by:
The mean of the target’s maneuvering acceleration
is taken as the optimal estimate of the state variable
. The variance of the Gaussian distribution is
where
represents the derivative of the optimal estimate of the target acceleration
, and
is the adaptive coefficient for the acceleration variance, which takes a constant value.
Equations (11)–(13) together form the adaptive Gauss model.
- 2.
Improved Gauss model;
The acceleration variance in the adaptive Gaussian model Equation (13) is solely dependent on the rate of acceleration change. Considering the motion characteristics of underwater targets, a singular acceleration change may not distinctly capture the targets’ maneuvering variations. In addition, in this model, the maneuvering frequency and the adaptive coefficient b for the acceleration variance are fixed parameters that lack adaptability. The enhancement of the adaptive Gaussian model is as follows:
The construction of a tracking system using the discrete KF algorithm based on the adaptive Gaussian model is detailed in the
Appendix A. The discretized expression for Equation (13) is shown in Equation (14):
Incorporating the influence of the target position and velocity on acceleration changes, the discrete acceleration variance formula is redefined as:
where
represents the variance fuzzy adaptive coefficient and
represents the tracking step size.
Using a fuzzy reasoning system [
2] to obtain
, set the fuzzy {VS, S, M, B, VB} to represent very small, small, medium, large, and very large, respectively. Taking the current acceleration from the state prediction and the innovation from the KF (the difference between the actual measurement and the predicted state estimate [
22]) as inputs, we employ the membership functions illustrated in
Figure 5 to fuzzily obtain both inputs. The output variable is denoted as
. For computational convenience, the fuzzy input values for acceleration are normalized, restricting their range to within
.
Based on the characteristics of underwater target motion, the following fundamental rules can be derived: When the acceleration is very small and the innovation is small, the acceleration change is small, leading to a decrease
; when the acceleration is very small and the innovation is small, the acceleration change is significant, leading to an increase
. Based on these considerations, a fuzzy rule table is designed, as shown in
Table 2, in which
represents the innovation. By employing the Mandani method for fuzzy inference and the weighted average method for defuzzification, the value of
can be obtained.
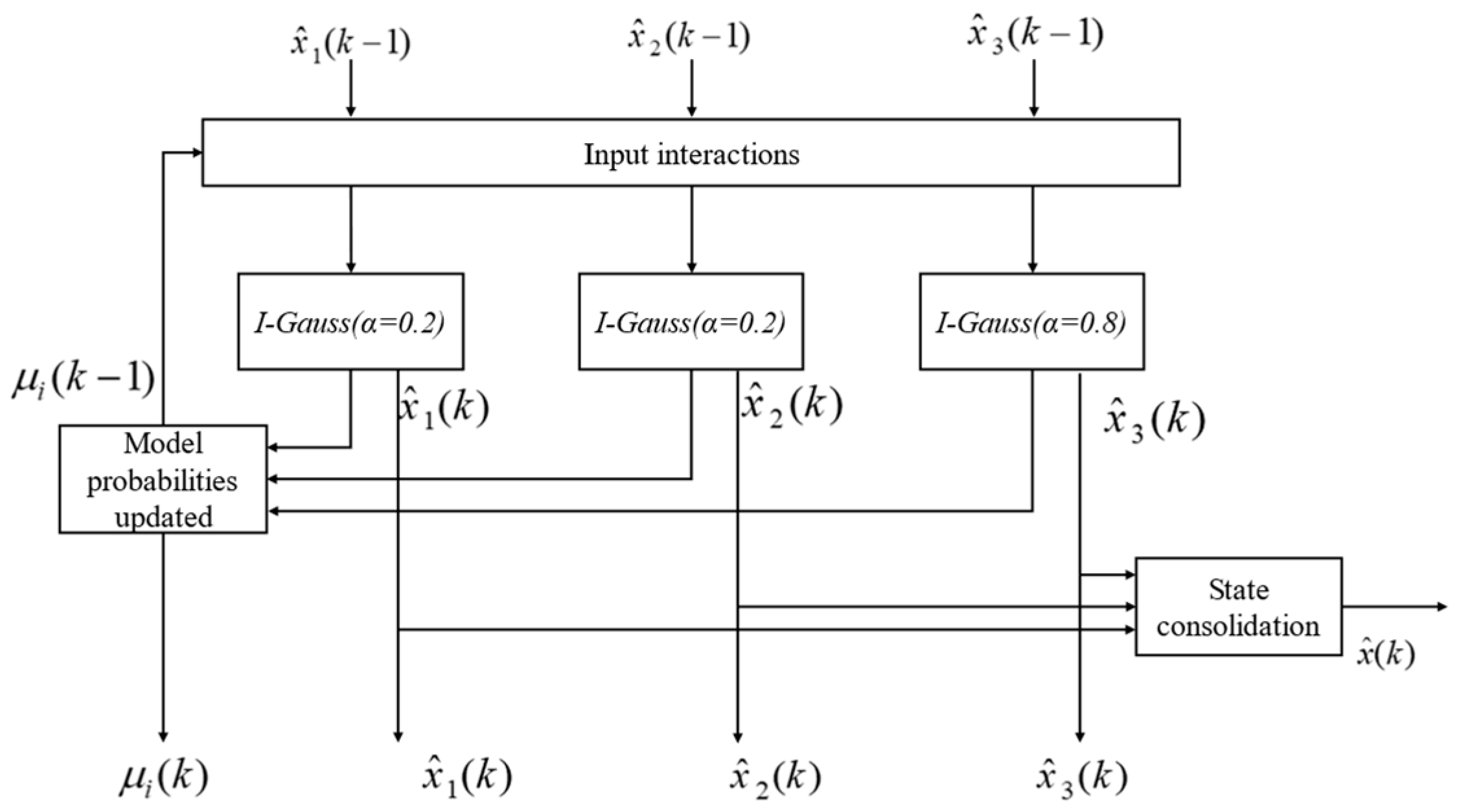
The fundamental idea of the interacting multiple model (IMM) is to match different motion models to the various motion patterns of maneuvering targets. To achieve the adaptive maneuvering frequency, three aforementioned improved models with different
are selected as three distinct models applied to the IMM algorithm. The switching of different
values is based on the maneuvering changes of the target. The specific process is illustrated in
Figure 6. For detailed symbols and derivation formulae, please refer to [
23].
To obtain accurate predictions of dynamic obstacle states for collision risk detection, a state-tracking system is established based on the I-Gauss model using the KF algorithm. The detailed process for establishing this system can be found in
Appendix A.
3.2.2. SCD Model
To achieve an accurate obstacle avoidance for dynamic obstacles, it is essential to assess their potential collision risk based on their current motion states. This enables early avoidance measures. Therefore, an SCD model is proposed, as illustrated in
Figure 7.
The blue dashed line represents the predicted trajectory of the dynamic obstacle, and the green dashed line represents the predicted trajectory of the AUV. Initially, the motion of the dynamic obstacle and the AUV are regarded as the I-Gauss model, and the motion state in the next step is predicted using the established KF prediction system. By varying the time step, the future trajectories of the AUV and the dynamic obstacles for the next
N time steps can be obtained through Equation (16):
where
denotes the position at the current moment,
represents the position at the next moment, and
is the state transition matrix of the motion model.
Subsequently, with the predicted position of the obstacles as the center, a dynamic obstacle collision risk zone is established, which is depicted as the shaded area in
Figure 7. Its radius is calculated as Equation (17):
where
is the radius of the collision risk zone,
represents the state covariance matrix of the prediction system based on Kalman filtering, and
denotes the trace of the matrix.
Finally, if the predicted trajectory of the AUV falls into the obstacle’s collision risk zone between
, it is considered to have a collision risk. Establishing an outer circle around the corresponding collision risk zones in the current instance and the previous instance is denoted as the detection zone; the center of the detection zone is located as follows:
Calculate the distance
from the center of the detection zone to the corresponding AUV trajectory. The formula for the improved repulsive force acting on the AUV is as Equation (19):
where
is the repulsion coefficient, and the method for its setting is introduced in
Section 3.3. Unlike traditional methods, where the repulsion force points directly from the obstacle to the robot, in Equation (19), the direction of the repulsion force is perpendicular to the corresponding AUV trajectory’s radial direction.
The collision risk detection method of the SCD model is as shown in Algorithm 1.
| Algorithm 1 The State-Tracking Collision Detection |
Input: Observation position of moving obstacles, AUV position, and predicted number of steps N.
Step 1: Input the observed position of the moving obstacle at the previous moment and the actual position of the AUV, and the Kalman filter prediction system based on the improved Gaussian model (in Appendix A) is used to predict the dynamic obstacle and AUV position at the next N moments. |
| at each moment according to Equation (17). |
| , calculate the distance from the center of the corresponding detection zone Equation (18) to the corresponding AUV trajectory. |
| Step 4: Calculate the repulsion using the improved Formula (19), and the direction is perpendicular to the radial direction of the corresponding AUV trajectory. |

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}