The following section is focused on the sub-systems of the complete ROV platform.
4.1. ROV Shape and Design
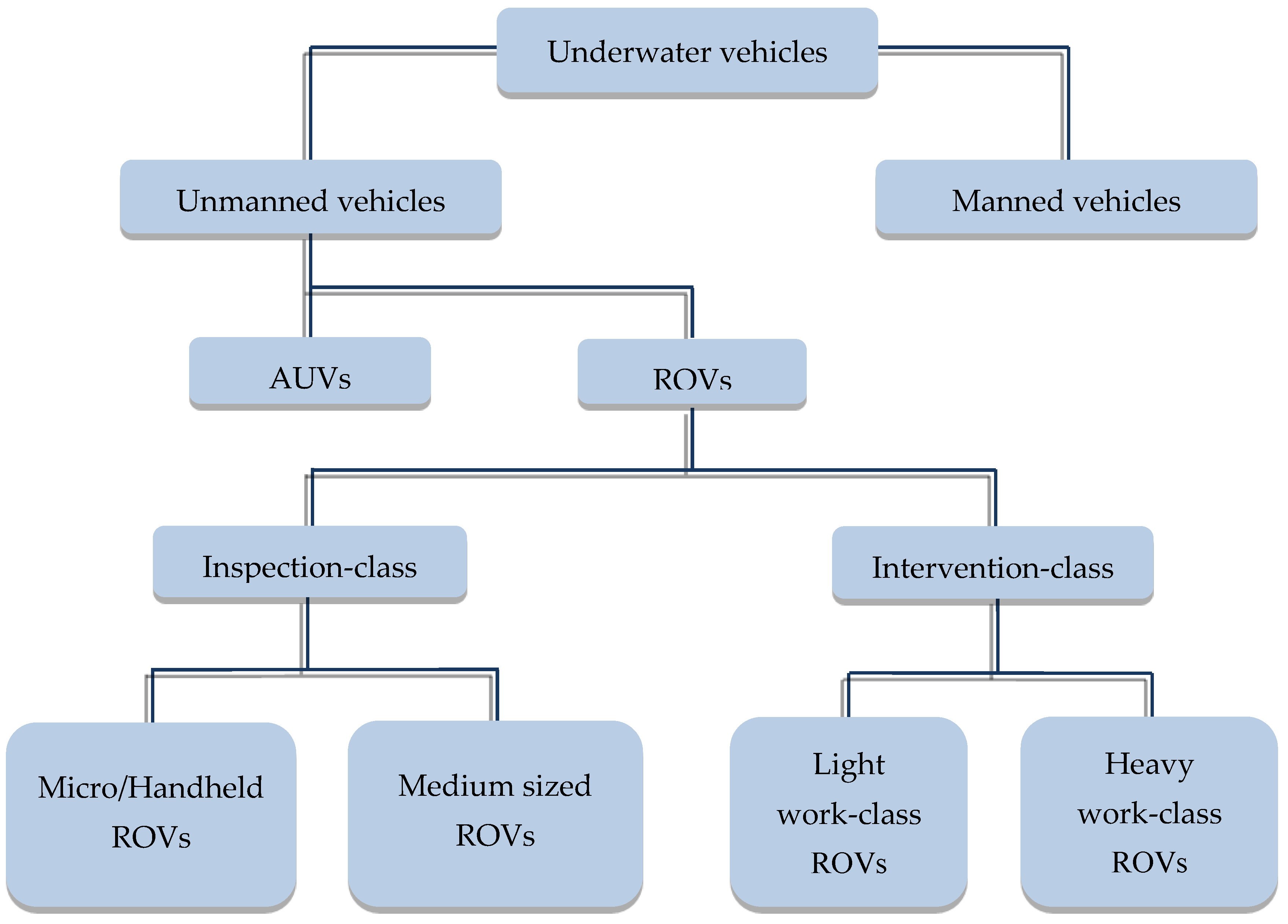
Inspection-class ROV shapes are varied and individual, with the most common design being the open frame type, which is widely used in the medium sized range. Other shapes, particularly in the micro range, can be varied and focused on the hydrodynamics of the vehicle.
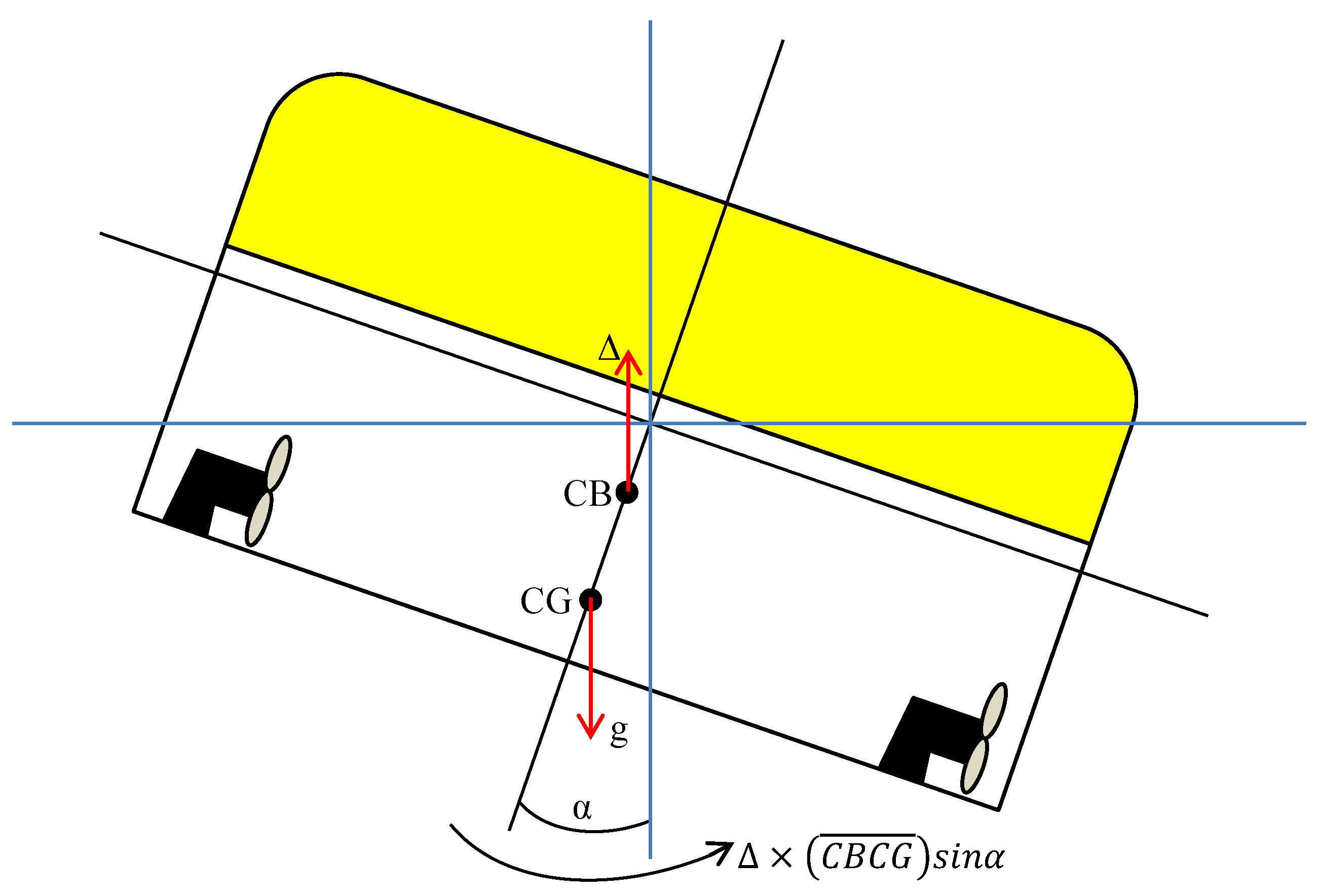
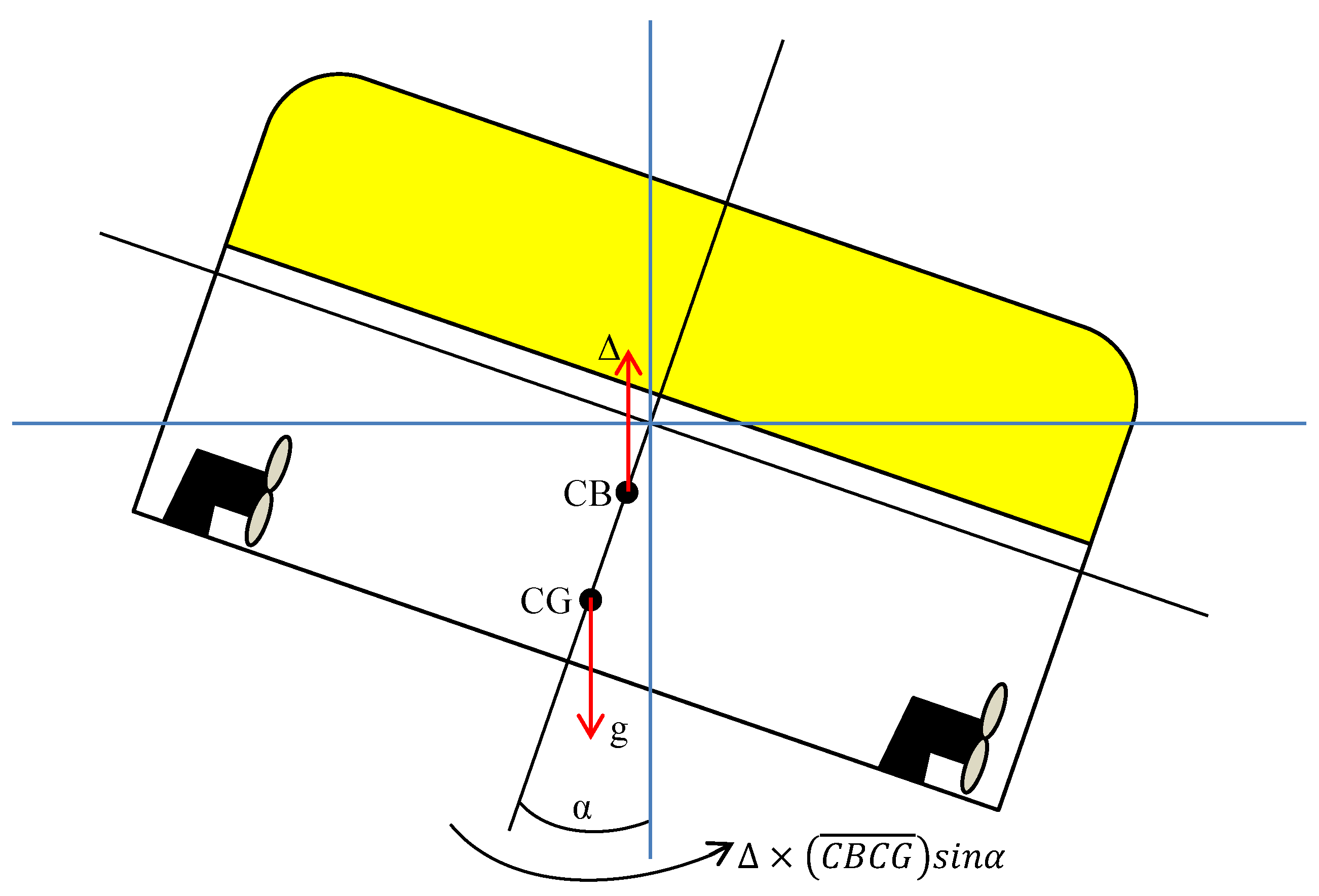
The open frame design utilised by the majority of medium size ROVs aids the stability of the vehicle which is related to the distance between the centre of gravity and the centre of buoyancy, otherwise known as the metacentric height [
11]. The centre of gravity (CG) of an object is the apparent point at which all of the weight is centred. The centre of buoyancy (CB) relates back to Archimedes’ principle. It is the point at which all the buoyant forces are centred. If the displaced water from the object could keep its shape, then the CG of this displaced water is equal to the CB of the object. The location and values of the CG and CB is related to the shape, weight and volume of the object.
In general, the CB should be located above the CG; otherwise the object will rotate to try to right itself. According to Wang and Lu [
12], when an ROV is subjected to changing water flow or changes in thruster forces it can incline along the
x or
y axis. A righting moment initiated by gravity, g and buoyancy force, Δ restores the vehicle to its upright state as shown in
Figure 2.
Ocean Modules [
13] represent a new trend in the inspection-class ROV industry by developing an ROV with the CB and CG located at the same point in the vehicle. This design has no restoring forces meaning that it has no inherent stability, allowing for 360° freedom of movement and various operating modes.
The shape of the vehicle is dependent on its buoyancy, frame, function and payload.
4.1.1. Buoyancy
To achieve buoyancy in an ROV, buoyancy blocks or modules, which are constructed of material that have density lower than water, are utilised. The buoyancy material must also be able to withstand the pressure applied when operating at depth.
Rigid polyurethane foam is a low cost material that is extensively used for ROVs with low operational depths, i.e., inspection-class ROVs. Rigid polyurethane foam is the term used to describe the category under which two different types of polymers fall: polyisocyanurate (PIR) and polyurethane (PUR). These two polymers are distinctly different.
For ROVs with the lowest operational depths, PUR is the preferred option as it is inexpensive and can be modified with ease. One constraint is depth rating; according to Trelleborg [
14], they only have a depth rating of up to 250 msw (metres of sea water), with a protective, polyurethane elastomer skin. PUR is used primarily in floats for pipelines, pontoons, cables and hoses where they are required to be positioned on the surface of the water.
PIRs are produced using a chemical reaction and mixing isocyanate, catalysts, blowing agent and surfactants, modified with polyurethane. The resulting mixture is poured as a liquid between metal faces. The liquid expands to form solid cellular foam that bonds to metal faces to form a continuous panel [
15]. It can then be cut and adjusted such that it meets the specifications of a particular ROV project. As it has a high percentage of closed cells and it is highly cross-linked, PIR offers dimensional integrity over a range of thermal values and pressure values. This is extremely important if an ROV is to “fly” at larger depths [
16]. However, a primary disadvantage is its high thermal insulation values which must be accounted for in the design of the ROV.
Another type of polymer that is used for shallow-water applications is polyvinyl chloride (PVC) foam. Oceaneering, the world’s largest ROV manufacturer, uses a type of PVC foam in some of its ROVs. The foam used is called Divinycell HCP by DIAB [
17]. The foam is generally coated with high strength skins. These skins offer the foam stiffness and strength while the foam maintains the buoyancy characteristic. The material can be easily machined but careful consideration must be taken to ensure that machining does not cause high temperatures, which can cause plastic deformation. The maximum depth rating of PVC foam is 700 msw.
Co-polymer foam is capable of operating at up to 600 msw due to its rigid, cross-linked, close cell structure. However, careful consideration must be taken in terms of density levels and depth ratings of the material. At lower densities the material may be suitable for short term applications, but if it is left under hydrostatic pressure for long periods, the material will deform, reduce volume and, ultimately, decrease buoyancy. Griffiths et al. observed reductions in buoyancy of the AUV Autosub-1a at depths of 504 m [
18]. This reduction in buoyancy was related to the compression of the co-polymer when subjected to pressure and low temperatures. To minimise this creep, the co-polymer foams must be de-rated from their maximum capability. For example, if a co-polymer foam is to have a design life of 25 years, the de-rated value may be as little as 50% of its maximum depth rating. A polyurethane elastomer coating can also be applied to the surface for extra mechanical protection [
14]. In more recent years Sakagami et al. [
19] developed a human-sized ROV using a co-polymer in the dynamic buoyancy system, which uses a gearing system to rotate the buoyancy blocks for pitch control of the vehicle and manipulator arms.
For deep-water missions more advanced products are employed. After using gasoline-filled chambers for the Trieste mission, where Don Walsh and Jacques Piccard descended to the Challenger Deep in 1960 [
20], syntactic foam became the new norm for deep water operations. Syntactic foam is a composite material which is made by inserting large quantities of hollow, glass, microspheres into an epoxy resin to create a single material. The term “composite” is sometimes used to describe this type of foam due to its use of different materials. However, the blocks are formed using dedicated mould tooling and machinery and are often used in multi-build ROV contracts as costs can be high for individual designs [
21].
Because of its low density and ability to withstand high pressures without altering its composition, syntactic foam is typically selected for deep and ultra-deep water applications [
22,
23]. Technology has improved immensely; initial depth ratings of 1800 m were achievable in 1964 [
24] compared to depth ratings in excess of 10,000 m, created by BTMI in recent times [
25]. Additionally, the vast majority of syntactic foams are rated to 6000 m which represents about 95% of Earth’s ocean depths [
26].
A recent study conducted by Poveda et al. [
27] found that, after long periods subjected to water immersion, the glass microspheres in syntactic foam can degrade, reducing the strength by about 30%. This effect occurs when water ingress penetrates to the interface between the glass microspheres and the epoxy resin and then de-alkalisation takes place, allowing water to ingress into the glass microspheres. For longer term deployments alkali-free microspheres are available.
Another advancement in buoyancy is ceramic sphere technology, offering extremely large compressive strength and material weighs about half that of stainless steel. The spheres are manufactured by pouring the aluminium oxide mixture into spherical moulds and then passing the sphere through a number of drying and firing stages. They are manufactured so that wall thickness is kept to a minimum and uniform throughout the sphere, negating any weak spots.
Woods Hole Oceanographic Institution developed a deep-sea exploration vehicle Nereus, which successfully dived to Challenger Deep in 2007. This vehicle utilised 1472 spheres with an OD of 91 mm, producing a net buoyancy of 417 kg [
28]. These spheres were developed by Deepsea Power & Light [
29].
In a 2016 study Jiang et al. [
30] noted that they could produce ceramic spheres for 1% of the previous reported product price and that these spheres could replace the use of plastic and glass microspheres.
All of the above technologies mentioned are fixed buoyancy. There is also an option for dynamic buoyancy systems for ROVs and underwater vehicles, sometimes known as active ballast. In a 2013 report Yu et al. [
31] proposed the use of active ballast on a handheld ROV which can be deployed from an AUV. This active ballast is used for recovery of heavy items. In 2015, Wood et al. [
32] developed an automated buoyancy control system for an underwater crawler. This type of buoyancy is preferred in a vehicle that, inherently, needs to sink in order to operate and then float for recovery. In an ROV, active buoyancy may allow for more efficient use of thrusters and preserve power, which was the motivation for Love et al. [
33] to implement the system into the Tethra submersible.
As the inspection-class ROVs are generally used at maximum depths of 300 m the future will see the continued use of PUR materials for low operational depths as it is inexpensive. For slightly deeper applications PIR, PVC or co-polymer material is available. However, if the vehicle is to be docked permanently underwater or spends extended periods underwater, low density co-polymer foam may not be suitable due to the possibility of deformation, thus reducing buoyancy.
4.1.2. Frame
The frame of an ROV is used to mount equipment and provide support and protection during operations. The majority of ROV manufacturers use open frames for stability and ease of addition of auxiliary equipment and these frames offer unobstructed water flows to the thrusters.
Some ROV manufacturers have used novel methods by integrating essential equipment for the ROV to act as (part of the frame. For their Pro 4 ROV, VideoRay use the pressure housing bottle, used to house the control and power equipment for the ROV, as the structural frame. The three thrusters, two lights and skids and the buoyancy block are all attached directly to this pressure housing [
34].
Other manufacturers produce their ROVs in one integrated module, meaning that there is no real distinction between the frame, the buoyancy, the pressure housing and the propulsion system. An example of such a system is the AC-ROV 100 that is manufactured by AC-CESS [
9]. Often, a disadvantage of this type of frame is the drag it creates due to its block structure. In all directions there is little flow through the frame and the block structure increases form drag as the fluid passing over it separates rapidly causing a turbulent flow regime.
The type of material used for the frame is an important decision to make for the design engineer. The material must be capable of withstanding harsh conditions whilst also providing enough structural strength so that it can support the equipment of the ROV.
Typically, 6061-T6 aluminium or 316 stainless steel is employed on large, heavy vehicles such as the “ABISMO” ROV, developed by JAMSTEC [
35], but it is also utilised on smaller inspection-class vehicles; Aras et al. [
36] developed a vehicle weighing just 18 kg, with a full aluminium frame and Mariscope [
37], the German ROV manufacturer, develop their FO II ROV frame completely in stainless steel and aluminium, which allows for a lifetime warranty to be provided with the ROV.
Using metal for the frame of an inspection-class ROV may not be ideal due to increased weight and degradation after long periods of contact with seawater. For this reason, polymers have become increasingly popular for frame material. Acrylonitrile butadiene styrene (ABS), high density polyethylene (HDPE) and polypropylene (PP) are common among ROV manufacturers. In 2015 Pranesh et al. [
38] carried out finite element analysis on a polypropylene material to investigate if the material could be utilised for an ROV. Results were positive but the team also adapted their design to accommodate L-brackets at weak locations. This approach may be undertaken in other ROV design situations. Manufacturers of common inspection class ROVs have been integrating polymer materials into their vehicles, the varieties of which can be seen in
Table 2.
An advancement in polymer material is the carbon fibre reinforced plastic (CFRP) which has a higher specific stiffness, strength and material damping than conventional polymers. Recently this material has been utilised in a project carried out by a team in the Korea Institute of Ocean Science & Technology where they constructed a frame for a seabed robot. This frame successfully supported the weight of the overall vehicle, which was 500 kg [
39]. The use of CFRP in the ROV industry is expected to grow in years to come.
Since the majority of inspection-class vehicles are man-portable, their weight in air is generally below 70 kg. This weight can be supported with polymer materials. The future will see the continued and expanded use of polymer materials because of the benefits of low weight, no degradation in water and low cost.
4.1.3. Hydrodynamics
For work-class ROVs, little emphasis is put on hydrodynamics. This is because they are not designed for speed through water. They are work horses designed to use their high power to carry out heavy duty work. When the ROV size is reduced and the vehicle has to operate in more energetic environments the need for hydrodynamic analysis in design increases.
Medium class inspection ROVs are of a general box-like shape, with a buoyancy block on top and the thrusters and equipment slung beneath on the vehicle frame. This arrangement provides for good stability providing vertical separation of the centre of gravity and the centre of buoyancy [
11]. Additionally, in acoustic imaging surveys, stability is important so that the data recovered has minimised noise due to fluctuations in the vehicle pitch and roll movements. One oddity in this category is the Ocean Modules’ V8 M500 ROV [
13], which is designed in a way that the centre of gravity is coincides with the centre of the vehicle, allowing for rapid reaction to disturbance in any direction but reliant on active control systems rather than static stability. Forces due to tether drag, swell and current are automatically compensated for in the control system.
Over the years, developments have been made to decrease the drag experienced by inspection-class ROVs, most evident in the handheld inspection class category [
40,
41,
42]. As the smaller ROVs are generally used as “flying cameras” stability is not the main design constraint so more novel shapes can be employed. One such novel shape is the eyeball ROV that was developed by Rust and Asada [
43]. This ROV allowed for movement in any direction using an internal gimbal and eccentric mass mechanism.
In recent years more research has been conducted on the movements of marine mammals and fish. Researchers are looking to imitate the movements of fish for more efficient use of power and for observing fish in their natural environment without frightening them. According to Yu and Wang [
44], the propulsion system for some fish is up to 90% efficient, while a conventional screw propeller has an efficiency of 40%–50%.
Most biomimetic fish robots can imitate a type of fish in a specific swimming mode—either cruising or manoeuvring. For advanced control, the robot should have options of switching between swimming modes. At the University of Canterbury, New Zealand, a research team designed a fish robot that could alternate between the two swimming modes by changing the behaviour of the pectoral fins during operation [
45]. Akanyeti et al. [
46] describes a rainbow trout inspired robot where they mimicked the fish’s lateral line flow sensing organ through use of MEMS strain gauges. The svenning (flow sensing for fish) was then translated into the required actuation for the fish to swim.
Salumäe et al. [
47] have developed an AUV that is inspired by the movements of turtles which can be used for shipwreck penetration and assisting archaeologists. In 2016 the U.S. Navy have sanctioned a significant grant to the Florida Atlantic University to develop an underwater robot that mimics a knifefish [
48].
Sepios [
49] is a cuttlefish inspired ROV with actuation through use of four fins. These fins allow for movement in and around seagrass and other marine vegetation without the risk of entanglement of vegetation in thrusters.
In situations where the current may be too strong for swimming robots, crawling or walking robots may be utilised. Kim and Jun [
50] describe the development of a crab-like ROV. This walking ROV would allow for visual inspection at high current sites. At the School of Marine Science and Technology in Newcastle University, UK they developed a multi-legged skid that could be retro-fitted to an ROV for tidal current pipeline inspection [
51].
Computational fluid dynamics (CFD) software is now commonly employed during the design process of such ROVs. Nguyen et al. [
52] explained how they utilised CFD to verify the coefficients used in design calculations and Long et al. [
53] employed CFD for validity measurement of a grey-box based parameter estimation approach to controlling an ROV.
As commercial products are focused on ROV capabilities and increasing applications the near future will continue see ROVs being produced with more emphasis on hydrodynamic analysis during the design process. With the growth in the marine renewable energy industry inspection-class ROV vehicles will be expected to operate in more extreme environments, meaning that, among other design criteria, ROV drag must reduce. Also, for the near future biomimetic robots, will not see any traction in the commercial side of the industry. Although novel, a lot more research needs to be carried out in order for the systems to have a chance of commercialisation. As of now their capabilities are too minimal. They will continue to be developed but for the coming years that development will be in the research field only.
4.4. Thrust
Inspection-class ROVs are almost exclusively propelled by thrusters. Thrusters are essential and allow for the ROV to manoeuver through the water column, station keep, travel to desired locations and control the ROV in dynamic environments, such as operating in strong currents or in the splash zone.
Depending on the type of ROV system, the thrusters used can be driven either electrically or hydraulically. In inspection-class ROVs electric DC thrusters are used extensively and here are a number of different DC motors used:
Brushed DC motors are generally cheap and easy to control. They require periodic maintenance and have a lower speed range because of mechanical limitations on the brushes [
115]. ROV manufacturers have used them in the recent past, with Deep Ocean Engineering integrating them into their version III Phantom ROV [
116], but advances in other DC motor technologies have made their usage quite rare nowadays. They are not the ideal motor to be used for thrusters as the enclosure needs to be opened to change brushes, thrust output is quite low and there is a high risk of water ingress at the output shaft seal. Nonetheless, brushed DC motor thrusters are still available for purchase today as they offer a low cost alternative.
Permanent magnet brushless DC motors do not require brushes as commutation is achieved through electronic controllers. According to Ishak et al. [
117], they are the preferred option over the brushed DC motor when used in extreme conditions. They offer a higher speed range, less maintenance requirement, higher efficiency and better thermal characteristics. However, they do require an electronic speed controller (ESC) for control and are often higher cost. Additionally brushless DC motors generally need gearing to ensure efficiency.
Magnetically coupled DC motors are also known as outrunner DC motors. They operate on the same principle as brushless DC motors; the only difference being the rotor rotates outside the stator and torque is transmitted using magnetic forces, therefore no mechanical connection is required. This arrangement is perfect for marine thrusters as it allows the internal stator and electronic components to be easily sealed from water. The rotor can then slip over the housing and is locked magnetically with the propeller mounted on the rotor. As the magnetic fields in the stator rotate so too does the rotor/propeller. Thruster manufacturer Tecnadyne produces a number of magnetically coupled thrusters and Blue Robotics have recently entered the market producing a low cost, lower thrust version.
Another version of the magnetically coupled thrusters is the rim driven thrusters. They have been in development since the 1940s [
118,
119]. The design incorporates the stator magnets mounted on the external rim of the thruster. Inside, the rotor magnets are connected to the propeller. According to Cao et al., these motors offer many advantages over conventional shaft driven motors:
The design also allows for the motor to be cooled, as the motor parts that are susceptible to heating have short thermal paths to the cooling water. Recently, rim driven thrusters have been developed by the University of Southampton [
118,
121] which TSL Technology Ltd. have a licence to produce commercially [
122]. They produce thrusters of various sizes, ranging from 50 mm to 700 mm. Enitech are another manufacturer who produce rim driven thrusters [
123]. Dunbabin et al. [
124] developed flat rim driven thrusters to reduce the horizontal drag of their Starbug AUV. The thrusters are only 16 mm and by using them they have reduced the frontal area of the vehicle by 16%. Although there are benefits to using this technology ROV manufacturers have been reluctant to switch over to them.
Holt and White [
125] proposed a design of two rim driven thrusters operating in a counter rotational fashion, eliminating the roll torque produced by a single thruster and Qiu et al. [
126] expanded on this idea by prosing a novel single thruster, with the rotor and armature rotating in different directions. This may be a useful solution in single thruster driven vehicles, like AUVs.
Future trends will see the use of magnetically driven (shaft and rim) continue to increase due to their superior benefits over the traditional types of thrusters.
Thruster Configurations/Architectures
The level of control of motion of an ROV is dependent on the thruster configuration used within the vehicle. Factors influencing the type of configuration include size, available power, required thrust, degrees of freedom (DOF) required, payload, etc. DOF describes every combination of a vehicle’s movement. The movements are described as rotations and displacements about the Cartesian axes
x,
y and
z. ROVs can have varying DOFs, depending on the orientation and number of thrusters on board.
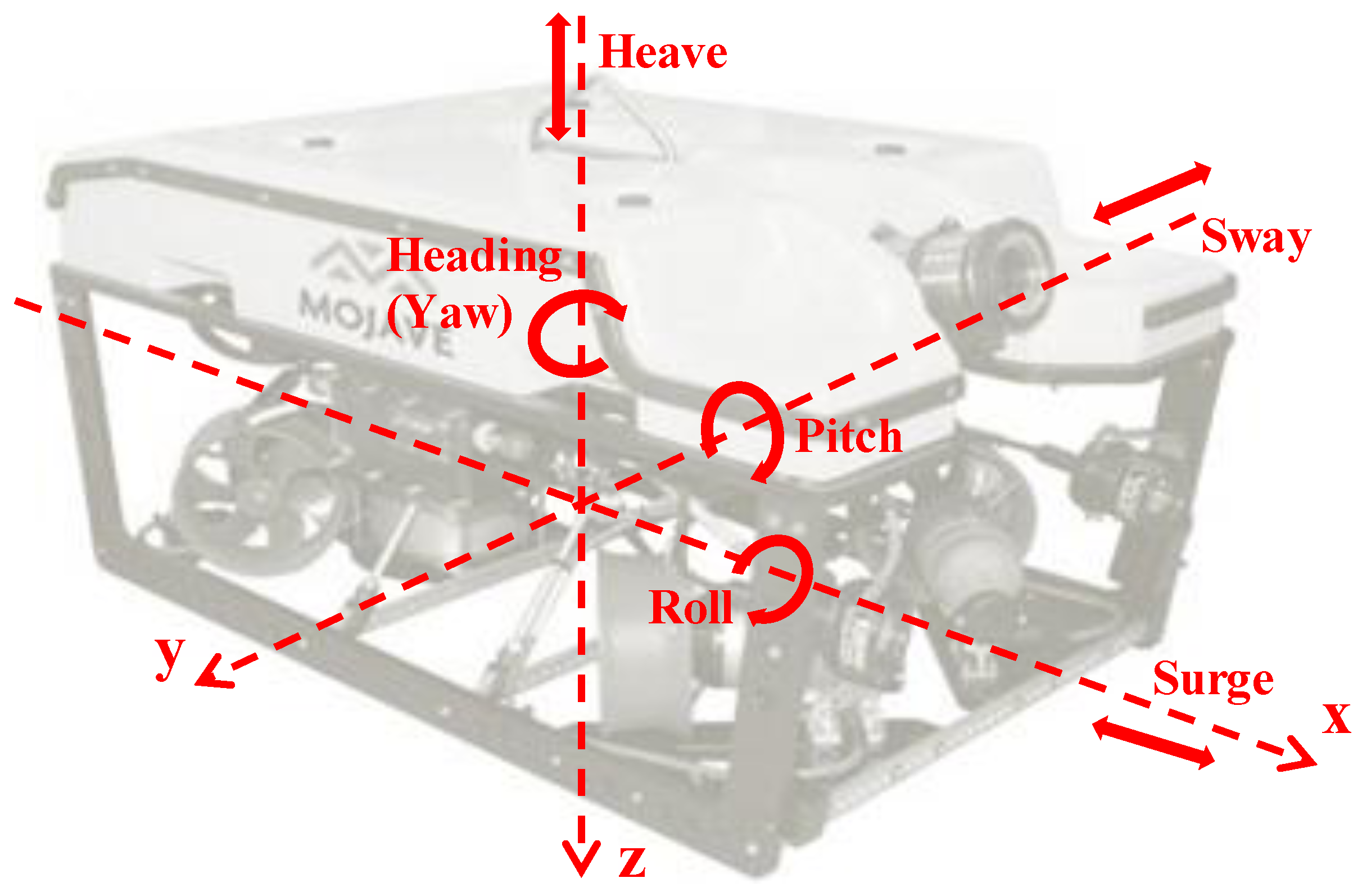
Figure 3 illustrates an ROV with the maximum number of degrees of freedom possible.
As can be seen in
Figure 3, the ROV has six DOFs, meaning it is capable of movements in every possible orientation:
Heave—movement along the vertical plane
Surge—longitudinal travel along horizontal plane
Sway—lateral movement along horizontal plane
Heading—rotation about the vertical axis (z)
Pitch—rotation about the lateral axis (y)
Roll—rotation about the longitudinal axis (x)
Generally, ROVs have at least three thrusters, one vertical and two horizontal. This allows for heave, surge and heading control. The low number of thrusters limits power draw and thus umbilical rating and diameter. The VideoRay Pro 4 [
34] and the Subsea Tech Sentinel 3.0 [
128] employ this configuration of thrusters.
However, Deep Trekker offer an ROV with two thrusters that can be controlled for heave, surge and heading [
129]. It makes use of their patented pitching system which is, essentially, a dynamic internal ballast. As the ballast rotates, the ROV can rotate to pitch up or down, allowing for heave control. The ROV is neutrally buoyant so it makes the ROV power usage quite efficient as there is no need for the constant use of vertical thrusters to keep the ROV at a desired water depth.
For extra control four thrusters can be used. The thruster configuration is generally one vertical thruster giving heave authority, one lateral thruster giving sway authority and two horizontal thrusters for surge and heading control. The Teledyne SeaBotix LBV150-4 [
130] and the ECA H300 [
131] ROVs employ this control architecture.
To enable six DOF at least six thrusters must be utilised. Generally, two horizontal thrusters for surge and heading and one for sway combined with three vertical controlling roll, pitch and heave. However this thruster configuration is not often used as it has limitations in surge and heading control.
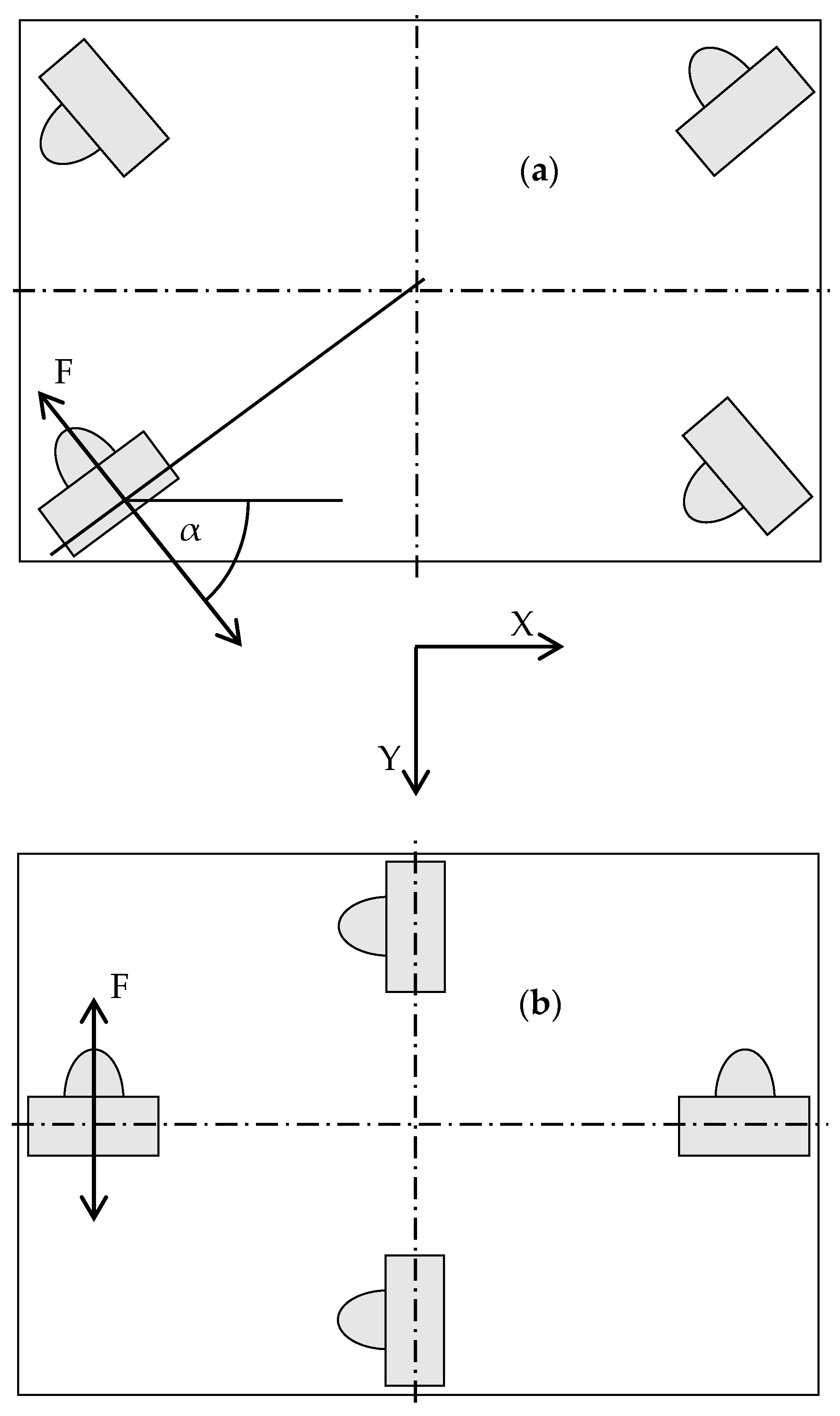
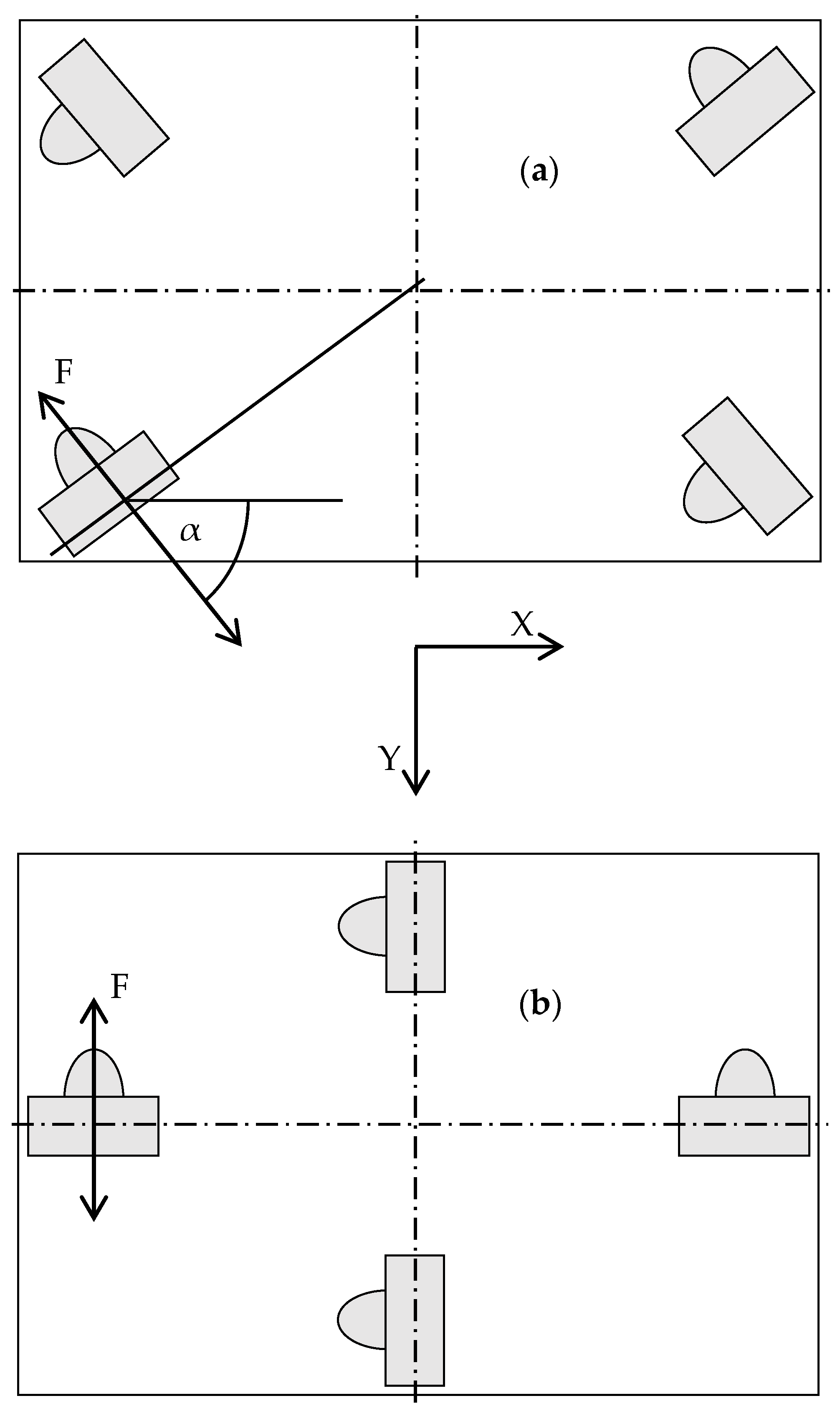
To allow for more accurate surge, sway and heading control, four thrusters, orientated in a vectored configuration can be utilised. This is one of the most popular methods of actuating an ROV today due to increases in control in all horizontal directions. The vectored thruster configuration as shown in
Figure 4a shows a marked improvement over the non-vectored configuration (
Figure 4b) in terms of surge and sway thrust capability.
The overall thrust in the vectored orientation is shown to be
Tx = 4
Fcosα,
Ty = 4
Fsinα, where
F is force, and the two forward, two lateral orientation’s thrust can be calculated as
Tx =
Ty = 2
F. If the vectored thrusters were orientated at 45° the thrust would be
Tx =
Ty =
, which shows the greater thrust capabilities [
132]. This vectored orientation also gives a higher level of fault tolerance [
133]. In a paper by Omerdic et al. [
134], they describe fault tolerant control of an ROV with the vectored orientation.
For the vertically orientated thrusters, either one, two, three or four thrusters can be utilised; one providing control over heave; two providing control over heave and roll; three allowing control over heave, roll and pitch; four allowing improved control over the three DOF with fault accommodation possibilities [
134]. The vertical thrusters can be orientated either directly vertical or at an angle of 45° or less from the vertical. This allows for further control of movement in the roll or pitch rotations, depending on the orientation of the thrusters as they come closer to an orientation tangential to the centre of rotation. This method of orientation is called vertrans and is utilised by Seamor Marine in their Steelhead and Chinook ROVs [
135]. Four vertical thrusters can also be employed if the vehicle is to be used for recovery of items/persons from a water column, allowing for extra thrust for a heavy payload.
Ocean Modules, along with designing their ROVs to be neutrally buoyant, use eight thrusters for complete control over the V8 M500 and V8 Sii models [
13].
The number of thrusters and configuration used is totally dependent on the application, level of control required and biasing of control in a particular plane. Some ROVs may need the majority of control in the surge, sway and heading and very little control of the heave of the vehicle whereas other ROVs may need high control of the heave due to lifting and recovery applications.
4.5. Navigation and Positioning Sensors
As ROVs are controlled remotely it is important to understand their location in the water column. GPS signals do not travel through water so other systems are utilised and, depending on accuracy requirements, multiple sensors may be employed in parallel. Practically every ROV has a basic suite of sensors for heading and depth information. A fluxgate compass sensor is used for vehicle heading and often three axis fluxgate sensors are used, which measure the magnetic field in three dimensions. This array is known as a magnetometer and they must be calibrated in each axis so that the magnetic field produced by the ROV is subtracted from Earth’s magnetic field. Dynamic interferences created by rotating thrusters will cause unwanted noise and generally output rates in commercially available compasses are low, with Bandala et al. [
136] reporting outputs of a few Hz and Dukan et al. [
137] observing a delay of 1 or 2 s. This delay would be too large for real time control applications but they offer a cheap heading solution for less sophisticated ROVs.
Pressure sensors are used for depth feedback. The pressure sensing element may be made from a strain gauge or piezoelectric material which, upon being subjected to pressure, will generate an electric charge, vary resistance or alter the frequency of oscillation from sensor output. For low cost auto control functions on inspection ROVs the options are generally auto-heading and auto depth. The auto-depth function was utilised in an ROV, developed by Aras et al. [
138], which utilised the feedback from a pressure sensor in a low cost system. Dubaibabu et al. [
139] describe a fibre optic sensor that can be used for pressure and temperature underwater. The sensor was mounted on an ROV for testing and accuracy of between 1 and 3 cm was achieved. If higher tolerances are required, pressure sensors are available that can measure depth change from as little as 1 cm. In high accuracy sensors like this, drift can be an issue so Sasagawa and Zumberge [
140] have developed a self-calibrating pressure recorder to reduce drift in a system used for recording crustal deformation on the seafloor.
An altimeter, also known as a single beam echo sounder, can be used for detecting an ROV’s distance from the seafloor using acoustic pulses. This sensor is useful if an ROV operates in an environment with little bathymetry detail. They are standard equipment in ROVs that have moderate positioning or control capabilities. Aras et al. describe a novel approach where they use a low cost fish tracker as an altimeter for an ROV, with accuracy readings of 90% [
141]. Optical altimeters, using laser triangulation mapping, have been used for a number of vision based navigation, motion control and real-time mosaicking applications [
142,
143]. These applications offer very accurate positioning feedback but are only available at near-seafloor altitudes and in locations of low turbidity.
As tasks become more demanding tighter navigation tolerances are required, which demands more sophisticated technology. Use of dead reckoning sensors can assist in meeting this demand. From a known position they can offer robust and high frequency navigation feedback but will accumulate errors over time [
144].
The most common form of dead reckoning used in subsea environments is the inertial navigation system (INS) based on micro-electro-mechanical sensor (MEMS) technology. The operating sensor inside an INS is an inertial measurement unit (IMU), which is typically made up of three accelerometers and three gyros. This sensor measures acceleration and rotational velocity. The INS is the complete package of IMU, controller and electronics combined. However, this type of technology can be highly prone to drift. According to De Agostino et al. [
145], who carried out a comparative study on different MEMS-based IMUs, the largest drift errors are related to inertial sensor imperfections of the gyro and accelerometer. Bikonis et al. [
146] integrated surface GPS positioning with an IMU, using an external Kalman filter, which produced more accurate positioning and Ko et al. [
147] propose a system using a combination of depth measurement and MEMS-based IMU to enhance the accuracy attitude estimation.
Further positional accuracy can be obtained by using advanced ring laser (RLG) or fibre optic gyros (FOG). Both technologies are extremely accurate and, when integrated into an INS, offer lower INS drift because they are not affected by distortions to the Earth’s magnetic field, typical around man-made structures [
148] and in areas with ferro-magnetic signatures in rock. RLGs have been commonly used in AUV applications, including the Jinbei, developed by JAMSTEC [
149] and the Theseus [
150]. They offer extremely low drift errors of better than 0.01°/h and mean time between failures (MTBF) in excess of 60,000 h [
151]. To prevent a phenomenon known as injection locking where, under slow rotations the gyroscopes will not accurately measure rotation rates, the mirrors in the RLG are mechanically dithered [
152]. This is a drawback of the RLG technology because it produces an audible tone, which can interfere with other acoustic sensors in the vehicle.
With recent advances in FOG technology they are becoming widely used in both AUV and ROV applications. Toal et al. [
153] integrated a FOG INS into a full navigation sensor suite of an ROV to allow for full auto pilot control and Marsh et al. [
154] integrated a FOG into an ROV used for HD image mosaicking at hydrothermal vents. According to Sahu et al. [
151], FOG offers the following advantages over RLG:
No moving parts
Higher resolution
Less power consumption
Acoustically silent
However, they do state that FOG technology suffers from greater drift. INS drift was also evident in experimental tests undertaken by Pranish and Taylor [
152], who compared a Kearfott T-24 RLG and an iXBlue PHINS III FOG that were mounted on AUVs. The experimental results can be seen in
Table 7.
From
Table 7 it can be noted that the experimental results exceeded the manufacturers’ specifications, with the FOG displaying lower accuracy but higher precision of positioning or less drift.
The implementation of RLG and FOGs in ROVs has been largely conducted in work-class vehicles. This is because of the physical size of the sensors. In recent years, the size of the technology is reducing, particularly with the FOGs, with weights in air available below 10 kg [
155,
156]. This reduction in size and weight is increasing the availability of more accurate navigation solutions for smaller vehicles. A comparison table of the various dead reckoning INS technologies was produced in a study by Andreas Løberg Carlsen [
157] which is shown in
Table 8.
From
Table 8 it is clear that the RLG and FOG technologies offer superior accuracy and precision over the MEMS technologies. However, in a recent study, Li et al. have argued that, due to continuous improvement, smaller size and lower costs, MEMS technology will gradually replace FOGs in high end applications [
158]. Furthermore, a team at NTNU are currently developing a north-seeking strapdown MEMS-based gyrocompass which will increase accuracy further [
159].
External sensors provide absolute positioning of the vehicle in its surroundings but at a low frequency. They are normally integrated into the high frequency responses of the dead reckoning INS sensors with a system name of aided INS. The vast majority of external navigation sensors are acoustic based.
A Doppler Velocity Log (DVL) utilises the Doppler Effect to track the vehicle’s velocity with respect to water flow or the seafloor. For bottom tracking the DVL must be within the DVL’s maximum altitude range from the sea floor, which can be up to 300 m [
160]. Teledyne RDI produces DVLs with multi-piston or phased array transducers. The phased array transducer offers many advantages over the piston transducers including smaller size, larger altitude range and reduced drag on the system due to the transducer’s single flat surface. This small DVL was successfully integrated to a hand-held inspection-class ROV for recent navigation field tests [
161]. A similar small form DVL was integrated onto another hand-held inspection-class ROV for an exercise to discover and characterise unexploded ordnance (UXO). The team discovered that, due to the proximity of the DVL to the thrusters, noise issues resulted in poor navigation readings [
162]. DVLs are generally integrated into INS systems for more refined positioning using Kalman filter equations. Henthorn et al. reported that they achieved accuracies of 0.05% dt with a DVL integrated to RLG INS on an AUV [
163]. More recently Troni and Whitcomb [
164] derived more accurate results when they carried out experiments which integrated a DVL with a low cost MEMS INS and a high end FOG INS on an ROV. Results indicated that the joint integration of sensors produced accuracy of 0.043% dt for the FOG and 0.448% dt for the MEMS system. Nortek [
165] have recently released a range of DVLs that improve accuracy when utilised in an INS Kalman filter by including a figure of merit output along with the standard outputs of velocity, time stamp and distance to bottom of each transducer. Algorithms are used to estimate the standard velocity error and can provide warnings for individual beams instead of entire velocity solution thus, through the Kalman filter, errors in data can be significantly reduced.
As DVLs use the Doppler Effect it is necessary to know the speed of sound propagating through the water for accurate measurements. Speed of sound in water is affected by the depth, salinity and temperature, which will change throughout the course of a mission, changing the accuracy of DVL readings. An alternative to a DVL is a Correlation Velocity Log (CVL) which uses a single downward looking wide beam and transmits two or more pulses at a calculated transmit separation in time. As the beam is down looking and the pulses follow the same path through the water they both see the same speed of sound profile and there is no error from sound speed mismatch. To calculate velocity the CVL uses the spatial cross correlation coefficient between two identical pulses whose transmit times are close together. The CVL is measuring the displacement between the two adjacent pulses as seen by two or more receive elements. If the spacing between the receive elements is known, then the distance travelled between the two pulses is known and can therefore calculate the velocity. They can also be used as an altimeter [
166].
Another form of absolute position navigation is using various transceivers of known position underwater. When a transponder, located on the ROV, is within range acoustic communication takes place and, through triangulation algorithms, the location of the ROV is calculated. There are a number of transducer configurations but, because of the compact size of the equipment and ease of setup, the ultrashort baseline (USBL) navigation system is the most suitable for the inspection-class ROVs. Dukan et al. [
137] installed dynamic positioning (DP) control in a medium size inspection-class ROV using a DVL and USBL integrated into the system’s basic MEMS INS and found that the slow update frequency of the position measurements from the acoustic positioning system resulted in difficulties with the control of the ROV. Zieliński and Zhou [
167] conduct a review of USBLs from the leading manufacturers which may be of interest to the reader. They also propose the use of an inverted USBL for navigation of a ROV tethered to seafloor node. An omni-directional transceiver is mounted on the ROV and the transponder is mounted on the node. When the acoustic signal is received at the node it sends data signals down the umbilical to the ROV for control. Watanabe [
168] also describes an inverted USBL that will reduce latency by allowing the vehicle control system direct access to the navigational data from the hydrophones on-board.
There are multiple active sonar systems available for underwater mapping and search and rescue of ROV geo referenced navigation. Side scan sonars are primarily used for searching an area. They have two arrays that emit sonar pulses and receive reflections of the emitted pulses and they measure an intensity v time series for the reflections but cannot discriminate arrival angle of the received. This means that they can produce high resolution images for search but no depth information. Alternatively, multibeam sonar produce acoustic “images” of the bathymetry by pulsing multiple acoustic beams in a wide swath under the vehicle. They can be used with an accurate INS to produce large survey maps. They can also be used as an external sensor in an aided INS to reference geophysical objects around the ROV. Carreno et al. [
169] carried out an extensive review on terrain based navigation (TBN) or terrain aided navigation (TAN) for AUVs and UUVs. They state that the multibeam sonar is the most utilised sensor in these applications, where the measured terrain profiles are correlated to the stored map to find the robot pose and update the control filter used in the vehicle. According to Carlstrom and Nygren [
170], if a multibeam is used in a pre-defined area the vehicle’s position estimate can be accurate to within a few metres. A team at the Norwegian Defence Research Establishment carried out sea trials using TAN on an AUV with a multibeam and DVL. After 7 h of operation the team found that the navigation system was only 4 m out from a USBL system that was attached to a AUV and a research vessel that followed its movements [
171]. These solutions can also be used in ROVs. An issue with this method is the reliance on having a prior map database of the location where the mission is being carried out.
Some applications make use of two sonars. Williams et al. [
172] describe a vehicle using one sonar for altitude and proximity to obstacles and another dual frequency sonar for imaging and mapping its surroundings. Feature based navigation or simultaneous localisation and mapping (SLAM) is becoming more widespread in underwater vehicles using imaging sonars as systems become more accurate and computational power is increasing [
173,
174]. In recent years the cost and size of multibeam sonars have dramatically reduced, with the Tritech Gemini and Teledyne BlueView being two examples of small forward looking multibeam sonars (FLS). This allows for integration into the hand-held inspection class ROVs. Hiranandani et al. [
175] integrated a small scanning sonar system on a portable ROV to be used for SLAM navigation in ancient underground cisterns in Malta. Feature based navigation offers benefits in that it does not suffer from drift and can be used in aided INS systems for corrections. Kinnaman and Gilliam [
176] describe a new INS system specifically for small ROVs that can be integrated with multibeam or scanning sonars to be used for SLAM navigation. However, these systems generally require post processing and real-time SLAM for navigation and control subsea which is not yet resolved in a robust manner.
Myint et al. [
177] describe an ROV with visual-based control using two cameras, which is used for sea docking applications.
SeeByte [
178] provide software solutions for ROV control systems by integrating inputs from multiple navigation sensors, providing improved user interfaces and allowing semi-automation of the vehicle, thus reducing the level of complexity for piloting. Stewart et al. [
179] have also produced a solution that aids pilot navigation and intervention by creating real-time augmented reality on the pilot interface and haptic technologies for force feedback controllers.
Traditionally, inspection-class ROVs have been equipped with a basic navigational sensor suite. As the size, weight and cost of accurate sensors are reducing, the future will see their increasing use throughout the inspection ROV sector, allowing these once basic vehicles to become more sophisticated and capable machines.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}