73.5 uW Indoor-Outdoor Light Harvesting System with Global Maximum Power Point Tracking

 , and
, and
Abstract
:1. Introduction
2. System Design
3. Input Matching and Time-Based Input-Power Sensing
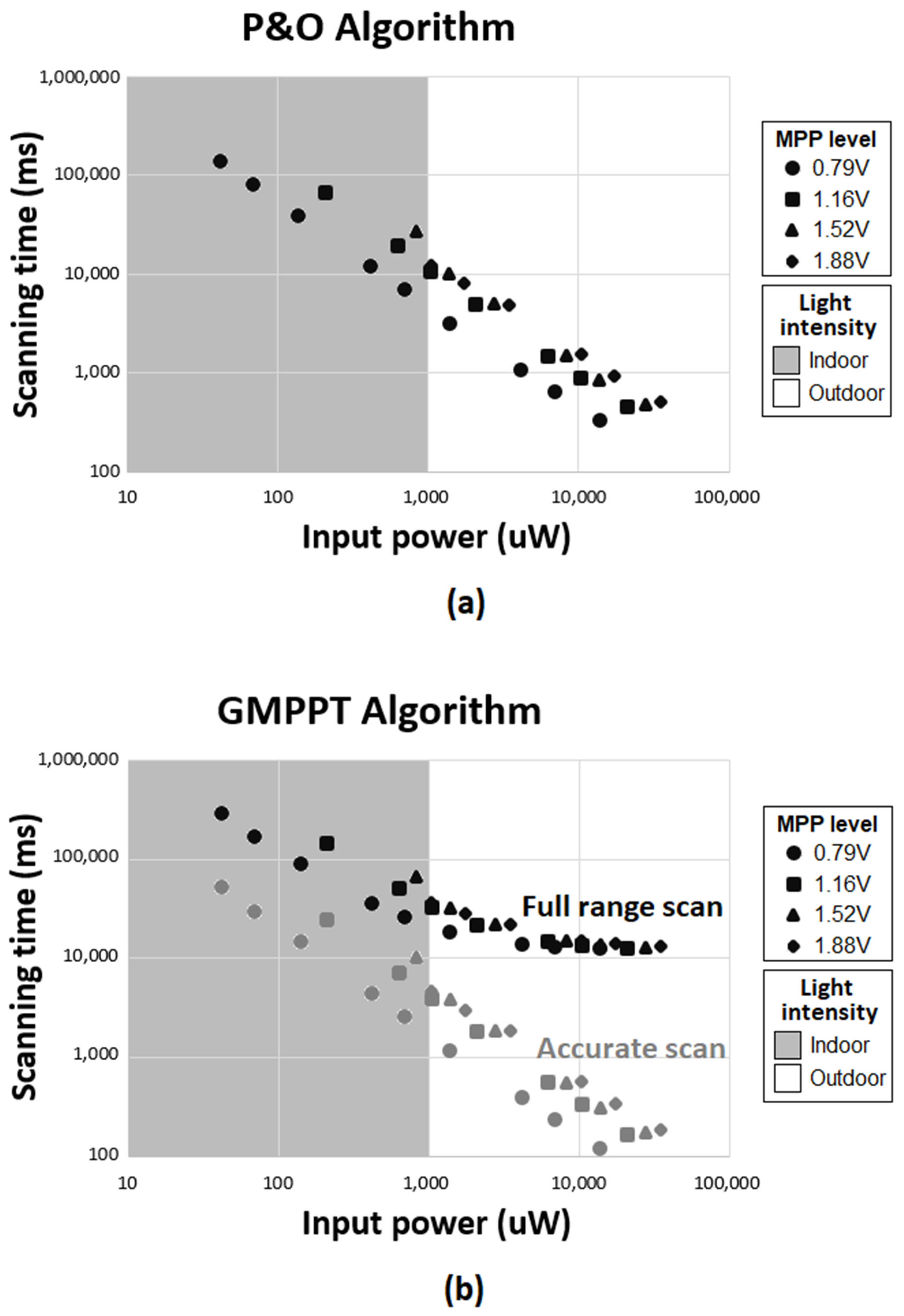
4. Global Maximum Power Point Tracking
5. Prototype Application
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nasiri, A.; Zabalawi, S.A.; Mandic, G. Indoor Power Harvesting Using Photovoltaic Cells for Low-Power Applications. IEEE Trans. Ind. Electron. 2009, 56, 4502–4509. [Google Scholar] [CrossRef]
- George, A.M.; Kulkarni, S.Y. Performance of Power Converters for Ultra Low Power Systems: A Review. In Proceedings of the 2018 Second International Conference on Advances in Electronics, Computers and Communications (ICAECC), Bangalore, India, 9–10 February 2018; pp. 1–5. [Google Scholar]
- Vullers, R.J.; Van Schaijk, R.R.; Visser, H.J.; Penders, J.; Van Hoof, C. Energy Harvesting for Autonomous Wireless Sensor Networks. IEEE Solid-State Circuits Mag. 2010, 2, 29–38. [Google Scholar] [CrossRef]
- Liu, X.; Sanchez-Sinencio, E. A Highly Efficient Ultralow Photovoltaic Power Harvesting System with MPPT for Internet of Things Smart Nodes. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2015, 23, 3065–3075. [Google Scholar] [CrossRef]
- Yue, X.; Kauer, M.; Bellanger, M.; Beard, O.; Brownlow, M.; Gibson, D.; Clark, C.; MacGregor, C.; Song, S. Development of an Indoor Photovoltaic Energy Harvesting Module for Autonomous Sensors in Building Air Quality Applications. IEEE Internet Things J. 2017, 4, 2092–2103. [Google Scholar] [CrossRef]
- Estrada-López, J.J.; Abuellil, A.; Zeng, Z.; Sánchez-Sinencio, E. Multiple Input Energy Harvesting Systems for Autonomous IoT End-Nodes. J. Low Power Electron. Appl. 2018, 8, 6. [Google Scholar] [CrossRef] [Green Version]
- Huang, Q.; Lu, C.; Shaurette, M. Feasibility study of indoor light energy harvesting for intelligent building environment management. In Proceedings of the International High Performance Buildings Conference, West Lafayette, IN, USA, 12–15 July 2010. [Google Scholar]
- Lu, C.; Park, S.P.; Raghunathan, V.; Roy, K. Efficient power conversion for ultra low voltage micro scale energy transducers. In Proceedings of the 2010 Design, Automation & Test in Europe Conference & Exhibition (DATE 2010), Dresden, Germany, 8–12 March 2010; pp. 1602–1607. [Google Scholar]
- Long, Y.-S.; Hsu, S.-T.; Wu, T.-C. Energy harvesting characteristics of emerging PV for indoor and outdoor. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 796–801. [Google Scholar]
- Bol, D.; Boufouss, E.H.; Flandre, D.; De Vos, J. A 0.48 mm2 5 μW–10 mW indoor/outdoor PV energy-harvesting management unit in a 65 nm SoC based on a single bidirectional multi-gain/multi-mode switched-cap converter with supercap storage. In Proceedings of the ESSCIRC Conference 2015—41st European Solid-State Circuits Conference (ESSCIRC), Graz, Austria, 14–18 September 2015; pp. 241–244. [Google Scholar]
- Chen, Y.-C.; Pan, C.-P.; Lin, C.-L.; Hwang, C.-H.; Chen, H. Photovoltaic energy harvesting in indoor environments. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 1–5. [Google Scholar]
- Tsai, T.-H.; Chen, K. A 3.4 mW photovoltaic energy-harvesting charger with integrated maximum power point tracking and battery management. In Proceedings of the 2013 IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 17–21 February 2013; pp. 72–73. [Google Scholar]
- Abdelmoaty, A.A.; Al-Shyoukh, M.; Hsu, Y.-C.; Fayed, A.A. A MPPT Circuit with 25 μW Power Consumption and 99.7% Tracking Efficiency for PV Systems. IEEE Trans. Circuits Syst. I: Regul. Pap. 2016, 64, 272–282. [Google Scholar] [CrossRef]
- Liu, X.; Sanchez-Sinencio, E. An 86% Efficiency 12 µW Self-Sustaining PV Energy Harvesting System with Hysteresis Regulation and Time-Domain MPPT for IOT Smart Nodes. IEEE J. Solid-State Circ. 2015, 50, 1424–1437. [Google Scholar] [CrossRef]
- NDash, S.S.; Padmanaban, S.; Morati, P.K. Maximum Power Point Tracking Implementation by Dspace Control-ler Integrated Through Z-Source Inverter Using Particle Swarm Optimization Technique for Photovoltaic Applications. Appl. Sci. 2018, 8, 145. [Google Scholar]
- Danandeh, M.; Mousavi, S.M. Comparative and comprehensive review of maximum power point tracking methods for PV cells. Renew. Sustain. Energy Rev. 2018, 82, 2743–2767. [Google Scholar] [CrossRef]
- Weng, X.; He, F.; Zhao, Z.; Lu, T.; Yuan, L. Comparison of several MPPT methods for PV arrays under partially shaded conditions. In Proceedings of the International Conference on Renewable Power Generation (RPG 2015), Beijing, China, 17–18 October 2015; Institution of Engineering and Technology (IET): Beijing, China, 2015; p. 6. [Google Scholar]
- Patel, H.; Agarwal, V. Maximum Power Point Tracking Scheme for PV Systems Operating Under Partially Shaded Conditions. IEEE Trans. Ind. Electron. 2008, 55, 1689–1698. [Google Scholar] [CrossRef]
- Oubbati, B.K.; Boutoubat, M.; Belkheiri, M.; Rabhi, A. Global maximum power point tracking of a PV system MPPT control under partial shading. In Proceedings of the 2018 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Algiers, Algeria, 28–31 October 2018; pp. 1–6. [Google Scholar]
- Gosumbonggot, J.; Nguyen, D.-D.; Fujita, G. Partial Shading and Global Maximum Power Point Detections Enhancing MPPT for Photovoltaic Systems Operated in Shading Condition. In Proceedings of the 2018 53rd International Universities Power Engineering Conference (UPEC), Glasgow, UK, 4–7 September 2018; pp. 1–6. [Google Scholar]
- Uprety, S.; Lee, H. 23.6 A 43 V 400 mW-to-21 W global-search-based photovoltaic energy harvester with 350 μs transient time, 99.9% MPPT efficiency, and 94% power efficiency. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 9–13 February 2014; pp. 404–405. [Google Scholar]
- Kapić, A.; Zečević, Ž.; Krstajić, B. An efficient MPPT algorithm for PV modules under partial shading and sudden change in irradiance. In Proceedings of the 2018 23rd International Scientific-Professional Conference on Information Technology (IT), Zabljak, Montenegro, 19–24 February 2018; pp. 1–4. [Google Scholar]
- Gosumbonggot, J.; Fujita, G. Partial Shading Detection and Global Maximum Power Point Tracking Algorithm for Photo-voltaic with the Variation of Irradiation and Temperature. Energies 2019, 12, 202. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Park, S.P.; Raghunathan, V.; Roy, K. Low-Overhead Maximum Power Point Tracking for Micro-Scale Solar Energy Harvesting Systems. In Proceedings of the 2012 25th International Conference on VLSI Design, Hyderabad, India, 7–11 January 2012; pp. 215–220. [Google Scholar]
- Lopez-Lapena, O.; Penella, M.T.; Gasulla, M. A Closed-Loop Maximum Power Point Tracker for Subwatt Photovoltaic Panels. IEEE Trans. Ind. Electron. 2011, 59, 1588–1596. [Google Scholar] [CrossRef]
- Rawy, K.; Kalathiparambil, F.; Maurath, D.; Kim, T.T.-H. A Self-Adaptive Time-Based MPPT With 96.2% Tracking Efficiency and a Wide Tracking Range of 10 μ A to 1 mA for IoT Applications. IEEE Trans. Circ. Syst. I Regul. Pap. 2017, 64, 2334–2345. [Google Scholar] [CrossRef]
- Available online: https://www.ti.com/product/MSP430FR5969 (accessed on 13 February 2021).
- Available online: https://www.uni-trend.com/html/product/Environmental/Environmental_Tester/Mini/UT383.html (accessed on 13 February 2021).
- Available online: https://www.powerfilmsolar.com/products/development-kits/ (accessed on 13 February 2021).
- Available online: https://www.analog.com/en/products/adxl362.html (accessed on 13 February 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input configuration | Vsource (V) | 1 | 1 | 2 | 2 | 3 | 3 |
| Rsource (Ω) | 10,000 | 1800 | 10,000 | 1800 | 10,000 | 1800 | |
| Vmpp (V) | 0.5 | 0.5 | 1 | 1 | 1.5 | 1.5 | |
| Max input power (uW) | 25 | 139 | 100 | 556 | 225 | 1250 | |
| P&O algorithm | Scanning time (s) | 60 | 15 | 65 | 15 | 70 | 15 |
| Detected Vmpp (V) | 0.65 | 0.65 | 0.88 | 0.93 | 1.39 | 1.39 | |
| Input power (uW) | 22.63 | 126.88 | 98.56 | 552.60 | 223.79 | 1243.28 | |
| Tracking accuracy (%) | 69.20 | 70.60 | 88.00 | 92.70 | 92.67 | 92.67 | |
| Tracking efficiency (%) | 90.51 | 91.36 | 98.56 | 99.47 | 99.46 | 99.46 | |
| GMPPT algorithm | Scanning time (s) 1 | 240 | 80 | 215 | 52 | 190 | 38 |
| Detected Vmpp (V) | 0.54 | 0.54 | 0.99 | 0.98 | 1.52 | 1.44 | |
| Input power (uW) | 24.82 | 138.13 | 99.99 | 555.41 | 224.96 | 1248.00 | |
| Tracking accuracy (%) | 91.60 | 92.60 | 98.90 | 98.40 | 98.67 | 96.00 | |
| Tracking efficiency (%) | 99.29 | 99.45 | 99.99 | 99.97 | 99.98 | 99.84 |
| Light Intensity | Pbatt (uW) | |
|---|---|---|
| No light | 0 LUX | −73.5 3 |
| Low indoor 1 | 50 LUX | −55 3 |
| Home 1 | 270 LUX | 17 |
| Office 1 | 870 LUX | 271 |
| Rainy 2 | 14,000 LUX | 7447 |
| Cloudy 2 | 47,000 LUX | 29,411 |
| Sunny 2 | 120,000 LUX | 71,537 |
| Ref No. | Technology | MPPT Method | MPPT Efficiency (%) | Power Throughput | Power Consumption |
|---|---|---|---|---|---|
| [26] | 65 nm CMOS | P&O | 96.2 | 6–600 uW | 5.1 uW |
| [14] | 0.18 um CMOS | P&O | 86 | 0–21 uW | 12 uW |
| [4] | 0.18 um CMOS | P&O | 89 | 0–29 uW | 20 uW |
| [13] | 0.18 um BiCMOS | P&O | 96–99.7 | 700 mW | 25 uW |
| [12] | TSMC 0.35 um | P&O | 89 | 500 mW | 3.4 mW |
| [25] | Discrete | P&O | 99.4 | 1–100 mW | 3.4 mW |
| [24] 1 | IBM 45 nm | Global | 99.8 | 140–440 uW | 180 uW |
| [21] | 0.35 um HVCMOS | Global | 99.9 | 0.4–21.1 W | 10.65 mW |
| [18] | Discrete | Global | 99.6 | 1.5 KW | N/A 2 |
| [20] | Discrete | Global | 99.9 | 5–500 W | N/A 2 |
| This work | Discrete | Global | 99.75 | 10 uW–300 mW | 73.5 uW |
| Light Intensity | Charging Time | ||||||
|---|---|---|---|---|---|---|---|
| No Light | 2 min/day | 4 min/day | 15 min/day | 6 h/day | 20 h/day | ||
| Home 1 | 270 LUX | 5.4 | 5.4 | 5.4 | 5.5 | 7.0 | Inf 3 |
| Office 1 | 870 LUX | 5.4 | 5.4 | 5.5 | 5.6 | Inf 3 | Inf 3 |
| Rainy 2 | 14,000 LUX | 5.4 | 6.1 | 6.9 | Inf 3 | Inf 3 | Inf 3 |
| Cloudy 2 | 47,000 LUX | 5.4 | 8.3 | Inf 3 | Inf 3 | Inf 3 | Inf 3 |
| Sunny 2 | 120,000 LUX | 5.4 | Inf 3 | Inf 3 | Inf 3 | Inf 3 | Inf 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kozalakis, K.; Sofianidis, I.; Konstantakos, V.; Siozios, K.; Siskos, S. 73.5 uW Indoor-Outdoor Light Harvesting System with Global Maximum Power Point Tracking. J. Low Power Electron. Appl. 2021, 11, 10. https://doi.org/10.3390/jlpea11010010
Kozalakis K, Sofianidis I, Konstantakos V, Siozios K, Siskos S. 73.5 uW Indoor-Outdoor Light Harvesting System with Global Maximum Power Point Tracking. Journal of Low Power Electronics and Applications. 2021; 11(1):10. https://doi.org/10.3390/jlpea11010010
Chicago/Turabian StyleKozalakis, Konstantinos, Ioannis Sofianidis, Vasileios Konstantakos, Kostas Siozios, and Stylianos Siskos. 2021. "73.5 uW Indoor-Outdoor Light Harvesting System with Global Maximum Power Point Tracking" Journal of Low Power Electronics and Applications 11, no. 1: 10. https://doi.org/10.3390/jlpea11010010