
A Three-Phase Resonant Boost Inverter Fed Brushless DC Motor Drive for Electric Vehicles

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
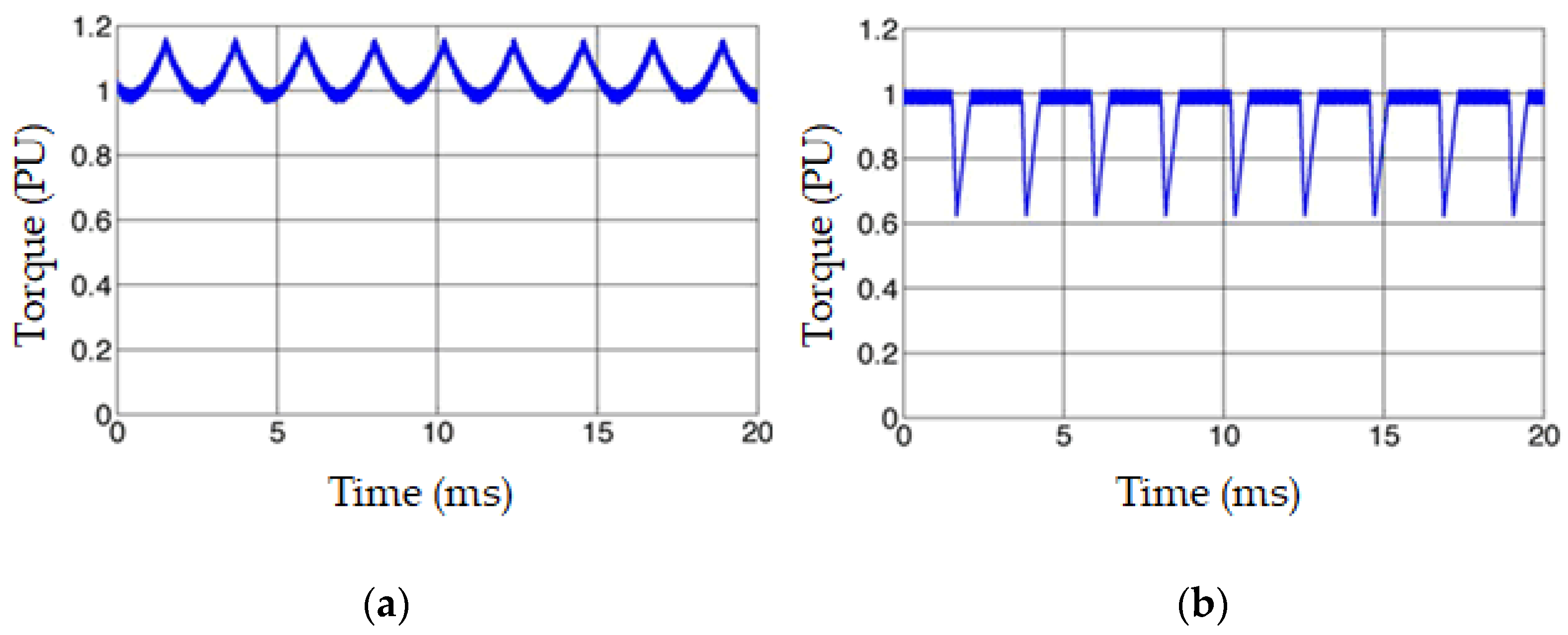
- A new three-phase resonant impulse inverter (TPRBI) is proposed to drive a PMBLDC at high torque, but with low ripples due to the sinusoidal current injected into the PMBLDC motor;
- The proposed inverter has an inherent voltage increase characteristic that leads to an increase in its efficiency by eliminating the extra boost power conversion stage, which is usually used by a voltage source inverter (VSI) feeding a PMBLDC;
- The maximum torque per ampere is higher in the proposed TPRBI-fed PMBLDC motor than the conventional VSI-fed PMBLDC motor drive.
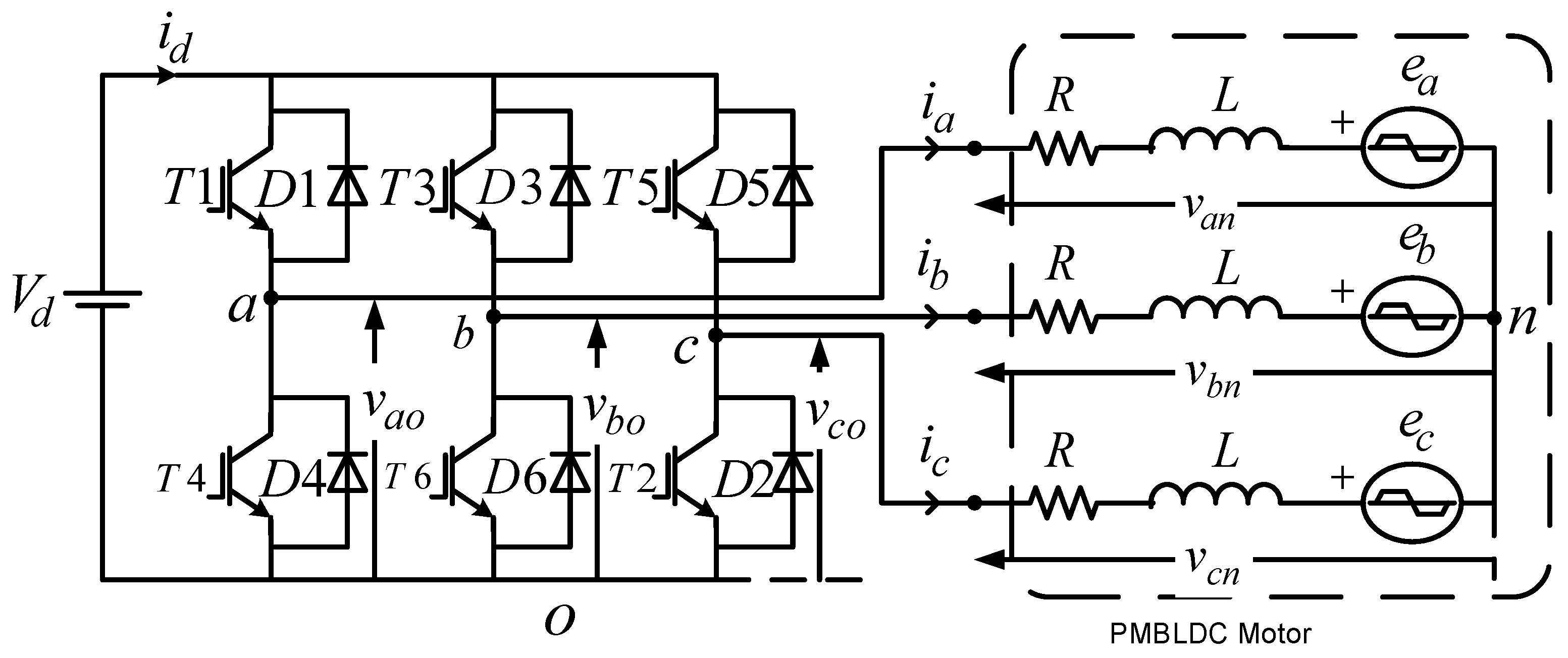
2. Three-Phase Resonant Boost Inverter: Circuit and Operation
3. PMBLDC Operation: Square vs. Sinusoidal Current Injection
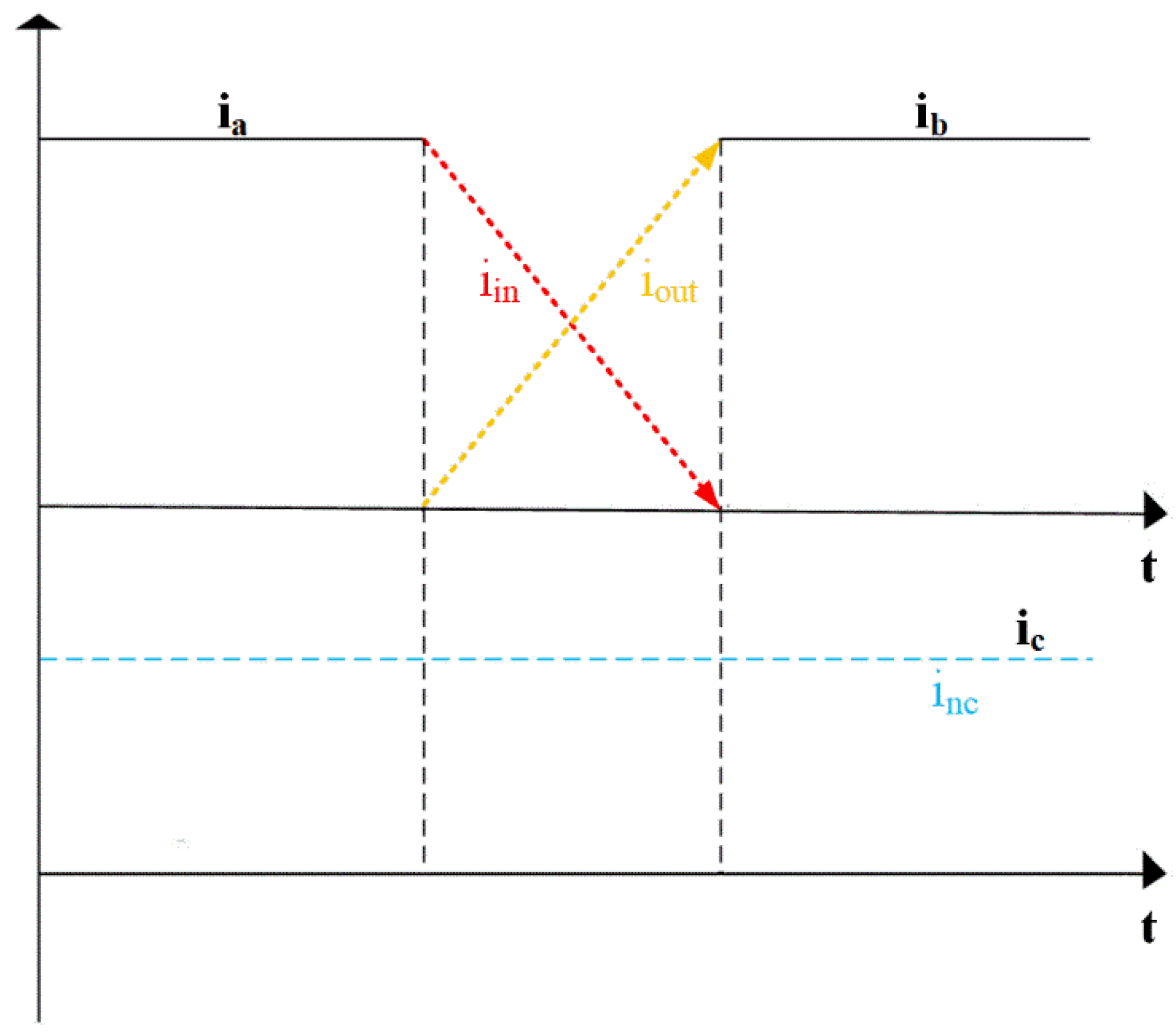
3.1. Square-Wave Current Injection (Conventional Vsi)
3.2. Sinusoidal Current Injection (Tprbi)
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ritchie, H.; Roser, M. Emissions by Sector—Our World in Data. Available online: https://ourworldindata.org/emissions-by-sector# (accessed on 2 June 2021).
- Shiue, Y.C.; Chen, P.J.; Lee, C.F.; Yu, C.C.; Chen, C.W. Foresight scenario analysis of motor system of electric vehicle. World Electr. Veh. J. 2012, 5, 975–981. [Google Scholar] [CrossRef] [Green Version]
- Phatiphat, P.; Sikkabu, S.; Poonnoy, N.; Mungporn, P.; Yodwong, B.; Kumam, P.; Bizon, N.; Nahid-Mobarakeh, B.; Pierfederici, P. Nonlinear Differential Flatness-Based Speed/Torque Control with State-Observers of Permanent Magnet Synchronous Motor Drives. IEEE Trans. Ind. Electron. 2018, 54, 2874–2884. [Google Scholar] [CrossRef]
- Keshri, R.K.; Tripathi, P.R. Torque estimator for a permanent magnet brushless DC motor drive. In International Transportation Electrification Conference (ITEC); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Tuan, V.T.; Phattanasak, M.; Kreuawan, S. Integrated Charger-Inverter for High-Performance Electric Motorcycles. World Electr. Veh. J. 2021, 12, 19. [Google Scholar] [CrossRef]
- Zhao, X.; Tang, J. Modeling and optimal shift control of a planetary two-speed transmission. World Electr. Veh. J. 2019, 10, 53. [Google Scholar] [CrossRef] [Green Version]
- Bizon, N. Energy efficiency for the multiport power converters architectures of series and parallel hybrid power source type used in plug-in/V2G fuel cell vehicles. Appl. Energy 2013, 102, 726–734. [Google Scholar] [CrossRef]
- Bizon, N. Energy Efficiency of Multiport Power Converters used in Plug-In/V2G Fuel Cell Vehicles. Appl. Energy 2012, 96, 431–443. [Google Scholar] [CrossRef]
- Bertoluzzo, M.; Buja, G.; Keshri, R.K.; Menis, R. Sinusoidal Versus Square-Wave Current Supply of PM Brushless DC Drives: A Convenience Analysis. IEEE Trans. Ind. Electron. 2015, 62, 7339–7349. [Google Scholar] [CrossRef]
- Buja, G.; Bertoluzzo, M.; Keshri, R.K. Torque Ripple-Free Operation of PM BLDC Drives With Petal-Wave Current Supply. IEEE Trans. Ind. Electron. 2015, 62, 4034–4043. [Google Scholar] [CrossRef]
- Texas Instruments Battery Management Deep Dive on-Demand Technical Training. Available online: https://training.ti.com/introduction-battery-management (accessed on 1 June 2021).
- Tripathi, P.R.; Thakura, P.; Keshri, R.K.; Ghosh, S.; Guerrero, J.M. 25 Years of Single-Stage Buck-Boost Inverters: Development and Challenges. IEEE Ind. Electron. Mag. 2021. [Google Scholar] [CrossRef]
- Caceres, R.O.; Barbi, I. A boost DC-AC converter: Analysis, design, and experimentation. IEEE Trans. Power Electron. 1999, 14, 134–141. [Google Scholar] [CrossRef]
- Fang, Z.P. Z-source inverter. IEEE Trans. Ind. Appl. 2003, 39, 504–510. [Google Scholar] [CrossRef]
- Ellabban, O.; Abu-Rub, H. Z-Source Inverter: Topology Improvements Review. IEEE Ind. Electron. Mag. 2016, 10, 6–24. [Google Scholar] [CrossRef]
- Siwakoti, Y.P.; Peng, F.Z.; Blaabjerg, F.; Loh, P.C.; Town, G.E. Impedance-Source Networks for Electric Power Conversion Part I: A Topological Review. IEEE Trans. Power Electron. 2015, 30, 699–716. [Google Scholar] [CrossRef]
- Mande, D.; Trovão, J.P.; Ta, M.C. Comprehensive review on main topologies of impedance source inverter used in electric vehicle applications. World Electr. Veh. J. 2020, 11, 37. [Google Scholar] [CrossRef]
- Siwakoti, Y.P.; Peng, F.Z.; Blaabjerg, F.; Loh, P.C.; Town, G.E.; Yang, S. Impedance-Source Networks for Electric Power Conversion Part II: Review of Control and Modulation Techniques. IEEE Trans. Power Electron. 2015, 30, 1887–1906. [Google Scholar] [CrossRef]
- Vijeh, M.; Rezanejad, M.; Samadaei, E.; Bertilsson, K. A General Review of Multilevel Inverters Based on Main Submodules: Structural Point of View. IEEE Trans. Power Electron. 2019, 34, 9479–9502. [Google Scholar] [CrossRef]
- Sahoo, M.; Keerthipati, S. A Three-Level LC-Switching-Based Voltage Boost NPC Inverter. IEEE Trans. Ind. Electron. 2017, 64, 2876–2883. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, B.; Qiu, D. A High Boost Active Switched Quasi-Z-Source Inverter With Low Input Current Ripple. IEEE Trans. Ind. Inform. 2019, 15, 5341–5354. [Google Scholar] [CrossRef]
- Tran, T.-T.; Nguyen, M.-K.; Duong, T.-D.; Choi, J.-H.; Lim, Y.-C.; Zare, F. A Switched-Capacitor-Voltage-Doubler Based Boost Inverter for Common-Mode Voltage Reduction. IEEE Access 2019, 7, 98618–98629. [Google Scholar] [CrossRef]
- Nguyen, M.-K.; Lim, Y.-C.; Kim, Y.-G. TZ-Source Inverters. IEEE Trans. Ind. Electron. 2013, 60, 5686–5695. [Google Scholar] [CrossRef]
- Lee, S.S.; Lim, C.S.; Siwakoti, Y.P.; Lee, K.-B. Hybrid 7-Level Boost Active-Neutral-Point- Clamped (H-7L-BANPC) Inverter. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2044–2048. [Google Scholar] [CrossRef]
- Guo, X. A Novel CH5 Inverter for Single-Phase Transformerless Photovoltaic System Applications. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 1197–1201. [Google Scholar] [CrossRef]
- Siddique, M.D.; Mekhilef, S.; Shah, N.M.; Ali, J.S.M.; Blaabjerg, F. A New Switched Capacitor 7L Inverter With Triple Voltage Gain and Low Voltage Stress. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1294–1298. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
| Parameter | Notation | Value |
|---|---|---|
| Terminal voltage | Vt | 48 Volts |
| Rated current | ip | 50 Amps |
| Resistance per phase | Rph | 50 mΩ |
| Inductance per phase | Lph | 75 µH |
| Motor constant | Kv | 0.32 V s/rad |
| Number of poles | Np | 8 |
| Parameter | VSI | TPRBI |
|---|---|---|
| DC-link Voltage | Should be ≥48 Volts (buck operation) | Wide range operation from 12 to 48 Volts (Boost operation) |
| Semiconductor Switching | Hard Switching | Soft Switching |
| Switching Loss | High | Zero (ZCS) |
| Peak Inverse Voltage (PIV) | Higher than DC-link Voltage | Equal to DC-link voltage |
| Total Blocking Voltage (TBV) ** | 6 | 1.5 |
| Efficiency | Low | High |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tripathi, P.R.; Laxmi, V.; Keshri, R.K.; Jha, A.V.; Appasani, B.; Bizon, N.; Thounthong, P. A Three-Phase Resonant Boost Inverter Fed Brushless DC Motor Drive for Electric Vehicles. Electronics 2021, 10, 1799. https://doi.org/10.3390/electronics10151799
Tripathi PR, Laxmi V, Keshri RK, Jha AV, Appasani B, Bizon N, Thounthong P. A Three-Phase Resonant Boost Inverter Fed Brushless DC Motor Drive for Electric Vehicles. Electronics. 2021; 10(15):1799. https://doi.org/10.3390/electronics10151799
Chicago/Turabian StyleTripathi, Prabhat Ranjan, Vijaya Laxmi, Ritesh Kumar Keshri, Amitkumar Vidyakant Jha, Bhargav Appasani, Nicu Bizon, and Phatiphat Thounthong. 2021. "A Three-Phase Resonant Boost Inverter Fed Brushless DC Motor Drive for Electric Vehicles" Electronics 10, no. 15: 1799. https://doi.org/10.3390/electronics10151799