
A Novel Adaptive PID Controller Design for a PEM Fuel Cell Using Stochastic Gradient Descent with Momentum Enhanced by Whale Optimizer



Abstract
:1. Introduction
1.1. Motivations
1.2. State of the Art
1.3. Contributions
2. PEM Fuel Cell Modeling
2.1. PEMFC Static Model
2.2. PEMFC Dynamic Model
3. Control Methodology
3.1. DC/DC Boost Converter
3.2. Adaptive PID Using SGD
3.3. Adaptive PID Using SGDM
3.4. Whale Optimization Algorithm
- Surrounding the prey;
- Bubble-net attacking method;
- Searching for prey.
3.4.1. Bubble-Net Attacking Method
3.4.2. Search for Prey
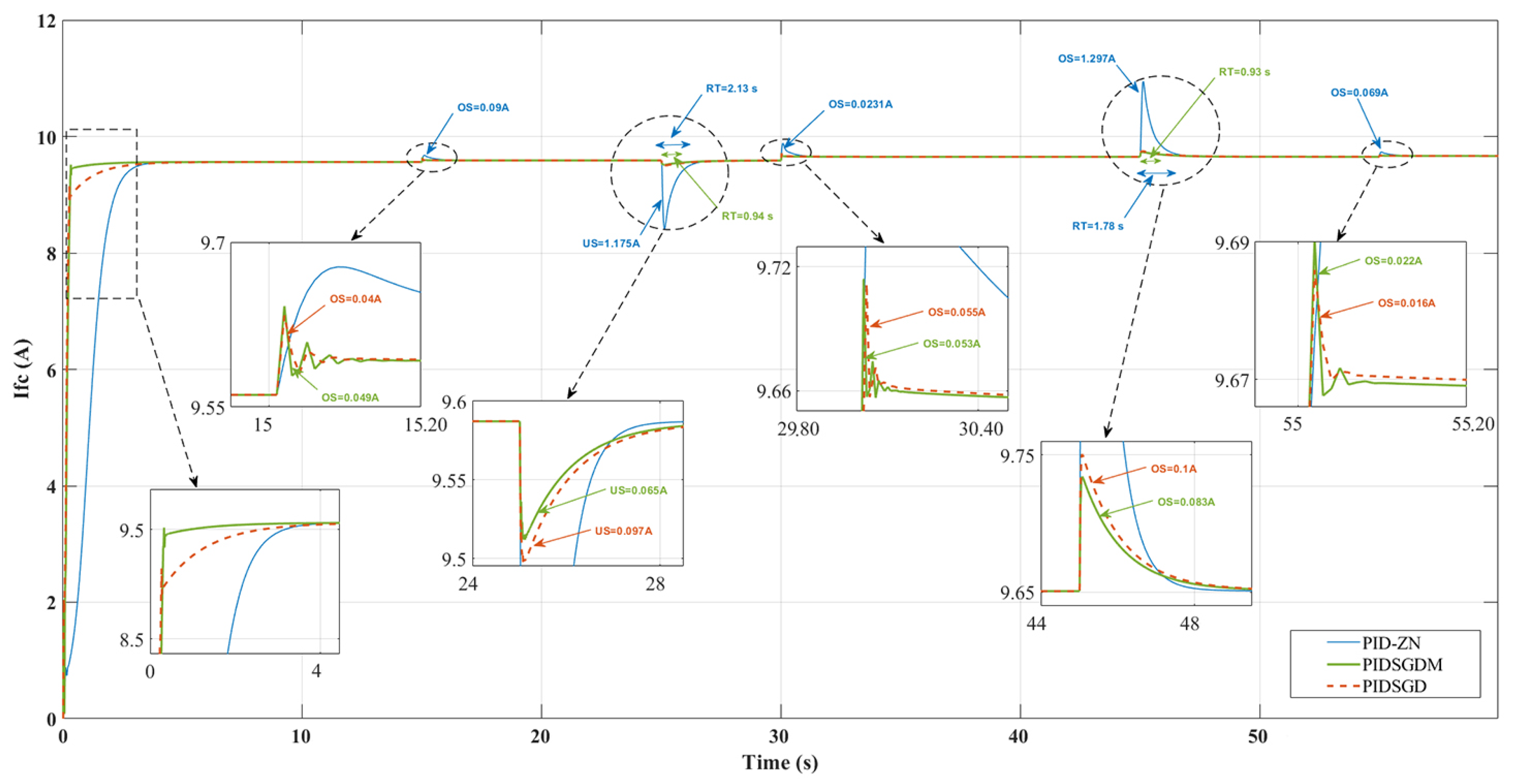
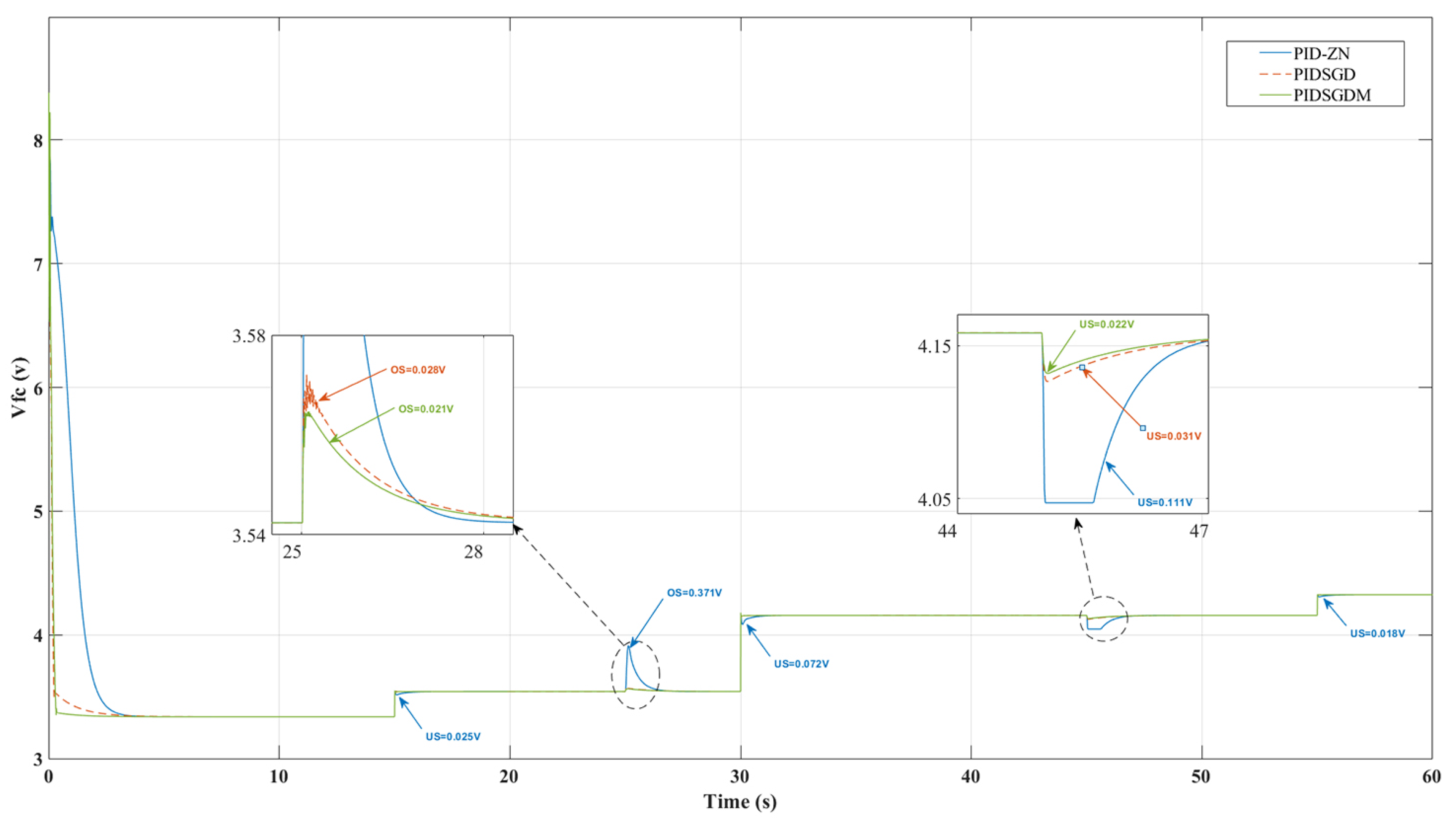
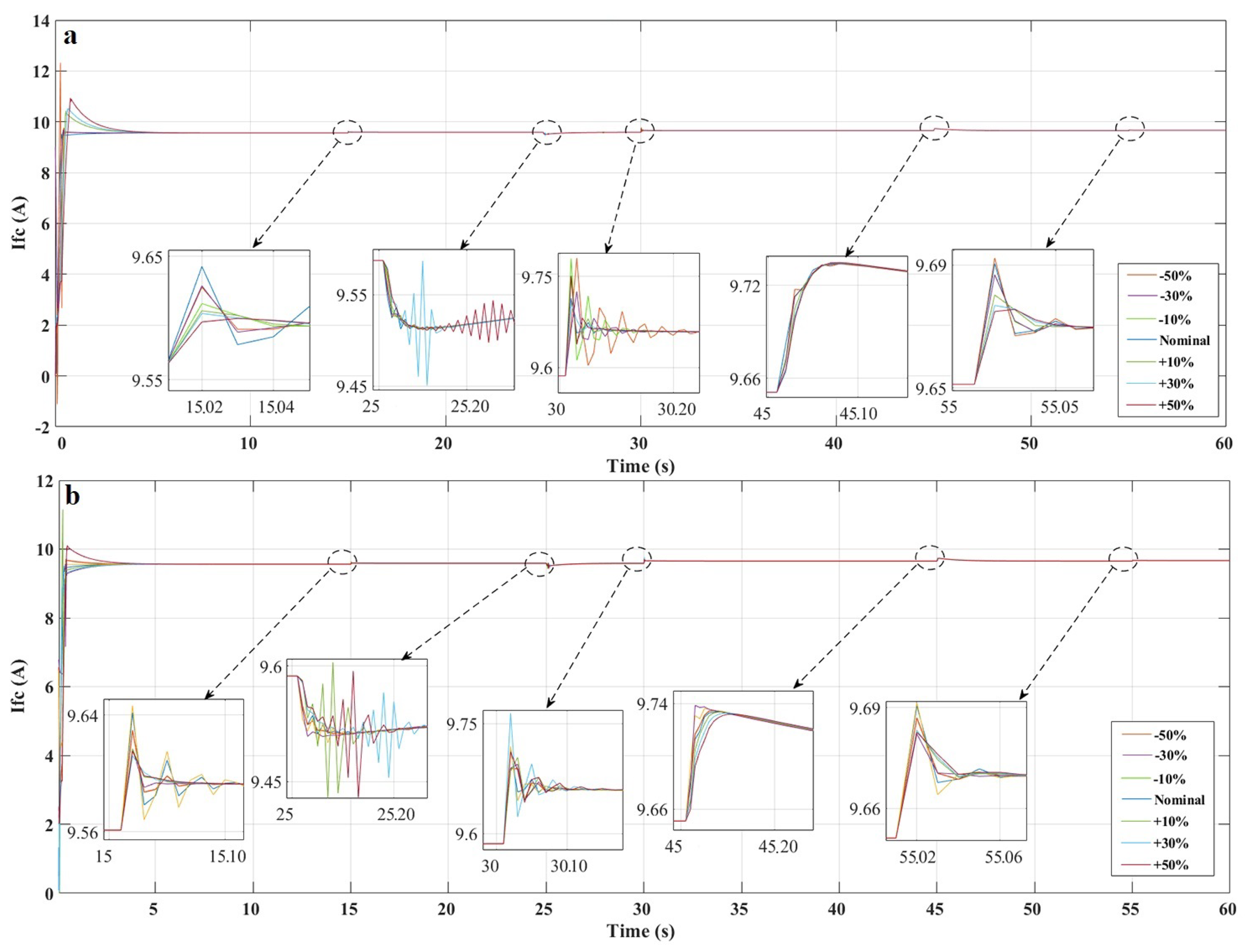
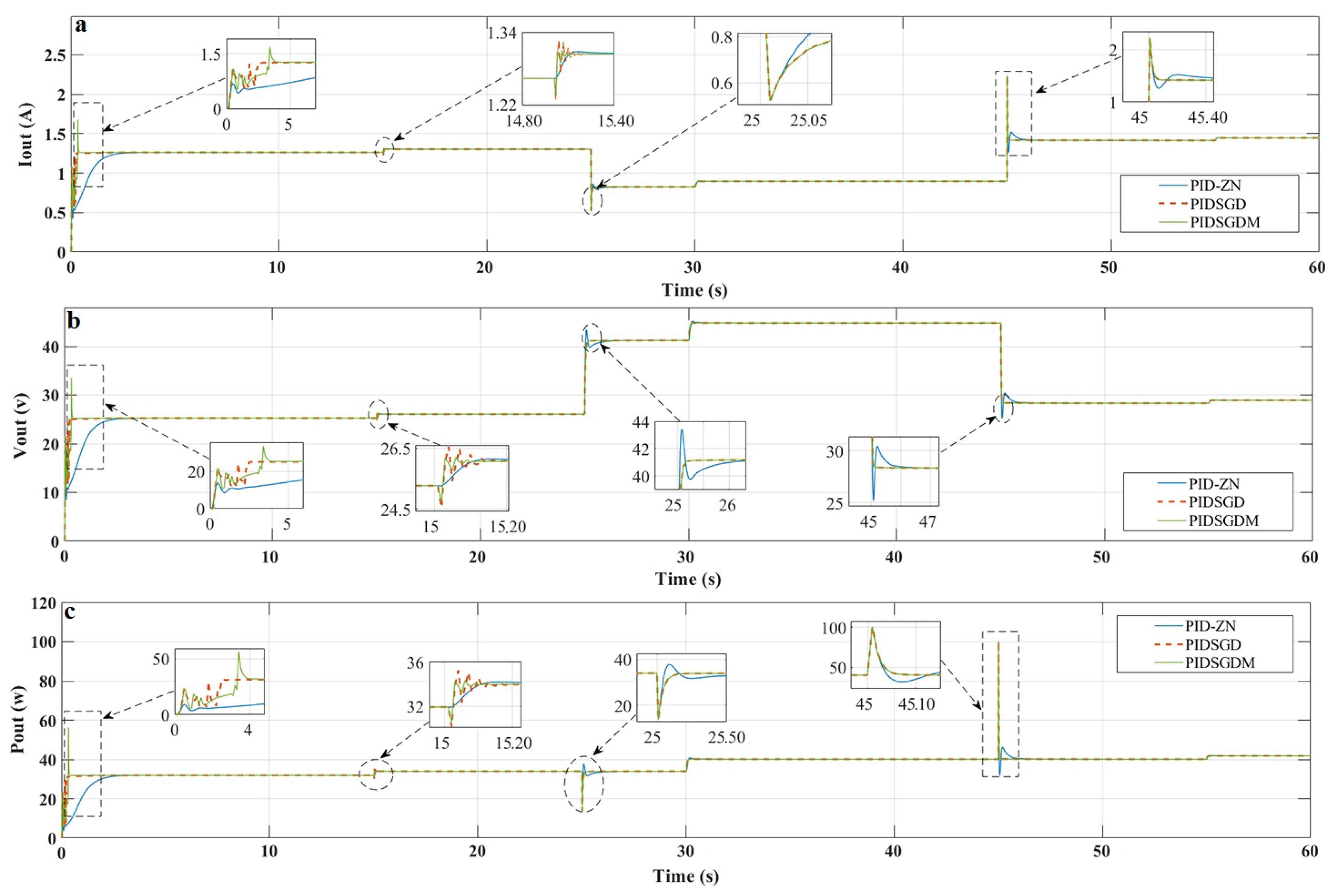
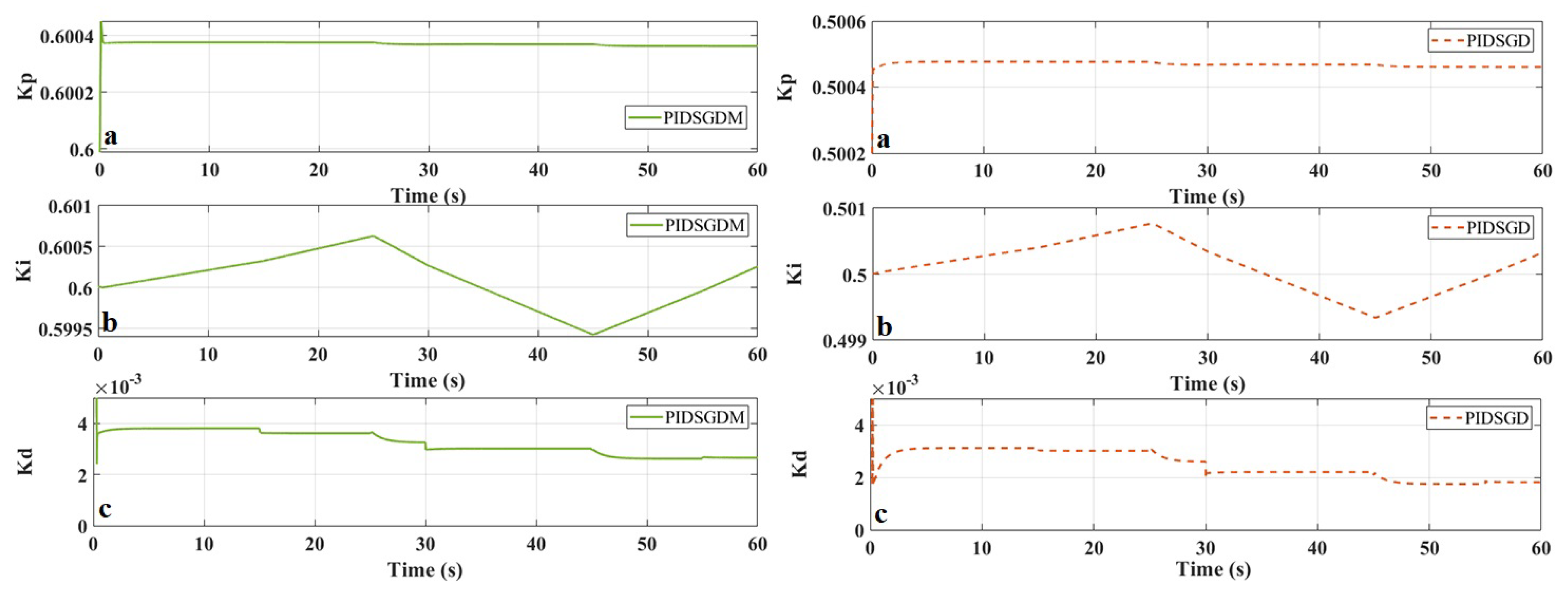
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SGD | Stochastic gradient descent |
| SGDM | Stochastic gradient descent with momentum |
| WOA | Whale optimization algorithm |
| ZN | Ziegler Nichols |
| PEMFCs | Proton exchange membrane fuel cells |
| SMC | Sliding mode control |
| PI | Proportional–integral |
| MPC | Model predictive control |
| FOPID | Fractional-order proportional-integral-derivative |
| MPPT | Maximum power point technique |
| PSO | Particle swarm optimization |
| PID | Proportional integral derivative |
| P&O | Perturb and observe |
| PWM | Pulse-width modulation |
| FL | Fuzzy logic |
| GWO | Grey wolf optimizer |
| EGWO | Extended grey wolf optimizer |
References
- Anderson, T.R.; Hawkins, E.; Jones, P.D. CO2, the greenhouse effect and global warming: From the pioneering work of Arrhenius and Callendar to today’s Earth System Models. Endeavour 2016, 40, 178–187. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kåberger, T. Progress of renewable electricity replacing fossil fuels. Glob. Energy Interconnect. 2018, 1, 48–52. [Google Scholar]
- Magoon, C.R., Jr. Creation and the Big Bang: How God Created Matter from Nothing; WestBow Press: Bloomington, IN, USA, 2018. [Google Scholar]
- Choudhury, D.C.; Kraft, D.W. Big Bang Nucleosynthesis and the Missing Hydrogen Mass in the Universe. Am. Inst. Phys. 2004, 698, 345–348. [Google Scholar]
- Williams, B.D.; Kurani, K.S. Commercializing light-duty plug-in/plug-out hydrogen-fuel-cell vehicles: “Mobile Electricity” technologies and opportunities. J. Power Sources 2007, 166, 549–566. [Google Scholar] [CrossRef] [Green Version]
- Verastegui, J.E.E.; Zamora Antuñano, M.A.; Resendiz, J.R.; García, R.; Kañetas, P.J.P.; Ordaz, D.L. Electrochemical Hydrogen Production Using Separated-Gas Cells for Soybean Oil Hydrogenation. Processes 2020, 8, 832. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Ramos-Hernanz, J.A.; Sbita, L. Real-time implementation of a super twisting algorithm for PEM fuel cell power system. Energies 2019, 12, 1594. [Google Scholar] [CrossRef] [Green Version]
- Delgado, S.; Lagarteira, T.; Mendes, A. Air Bleeding Strategies to Increase the Efficiency of Proton Exchange Membrane Fuel Cell Stationary Applications Fuelled with CO ppm-Levels. Available online: https://hdl.handle.net/10216/138585 (accessed on 23 July 2022).
- Mardle, P.; Ji, X.; Wu, J.; Guan, S.; Dong, H.; Du, S. Thin film electrodes from Pt nanorods supported on aligned N-CNTs for proton exchange membrane fuel cells. Appl. Catal. B Environ. 2020, 260, 118031. [Google Scholar] [CrossRef]
- García-Olivares, A.; Solé, J.; Samsó, R.; Ballabrera-Poy, J. Sustainable European transport system in a 100% renewable economy. Sustainability 2020, 12, 5091. [Google Scholar] [CrossRef]
- Gaboriault, M.; Notman, A. A high efficiency, noninverting, buck-boost DC-DC converter. In Proceedings of the Nineteenth Annual IEEE Applied Power Electronics Conference and Exposition 2004, APEC’04, Anaheim, CA, USA, 22–26 February 2004; Volume 3, pp. 1411–1415. [Google Scholar]
- Rodríguez-Abreo, O.; Rodríguez-Reséndiz, J.; Fuentes-Silva, C.; Hernández-Alvarado, R.; Falcón, M.D.P.T. Self-tuning neural network PID with dynamic response control. IEEE Access 2021, 9, 65206–65215. [Google Scholar] [CrossRef]
- Utkin, V.I.; Vadim, I. Sliding mode control. Var. Struct. Syst. Princ. Implement. 2004, 66, 1–8. [Google Scholar]
- García-Martínez, J.R.; Cruz-Miguel, E.E.; Carrillo-Serrano, R.V.; Mendoza-Mondragón, F.; Toledano-Ayala, M.; Rodríguez-Reséndiz, J. A PID-type fuzzy logic controller-based approach for motion control applications. Sensors 2020, 20, 5323. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Design of adaptive controller exploiting learning concepts applied to a BLDC-based drive system. Energies 2020, 13, 2512. [Google Scholar] [CrossRef]
- Villegas-Mier, C.G.; Rodriguez-Resendiz, J.; Álvarez-Alvarado, J.M.; Rodriguez-Resendiz, H.; Herrera-Navarro, A.M.; Rodríguez-Abreo, O. Artificial neural networks in MPPT algorithms for optimization of photovoltaic power systems: A review. Micromachines 2021, 12, 1260. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Farhat, M.; Sbita, L. Efficiency boosting for proton exchange membrane fuel cell power system using new MPPT method. In Proceedings of the 10th International Renewable Energy Congress (IREC), Sousse, Tunisia, 26–28 March 2019; Volume 3, pp. 1–4. [Google Scholar]
- Hu, P.; Cao, G.; Zhu, X.; Hu, M. Coolant circuit modeling and temperature fuzzy control of proton exchange membrane fuel cells. Int. J. Hydrogen Energy 2010, 35, 9110–9123. [Google Scholar] [CrossRef]
- Qi, Z.; Tang, J.; Pei, J.; Shan, L. Fractional controller design of a DC-DC converter for PEMFC. IEEE Access 2020, 8, 120134–120144. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Derbeli, M.; Barambones, O.; Cheknane, A. Design and implementation of high order sliding mode control for PEMFC power system. Energies 2020, 13, 4317. [Google Scholar] [CrossRef]
- Ahmadi, S.; Abdi, S.; Kakavand, M.A. Maximum power point tracking of a proton exchange membrane fuel cell system using PSO-PID controller. Int. J. Hydrogen Energy 2017, 42, 20430–20443. [Google Scholar] [CrossRef]
- Ahmed, N.A.; Al-Othman, A.; AlRashidi, M.R. Development of an efficient utility interactive combined wind/photovoltaic/fuel cell power system with MPPT and DC bus voltage regulation. Electr. Power Syst. Res. 2011, 81, 1096–1106. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Farhat, M.; Ramos-Hernanz, J.A.; Sbita, L. Robust high order sliding mode control for performance improvement of PEM fuel cell power systems. Int. J. Hydrogen Energy 2020, 45, 29222–29234. [Google Scholar] [CrossRef]
- Choe, S.; Lee, J.; Ahn, J.; Baek, S. Integrated modeling and control of a PEM fuel cell power system with a PWM DC/DC converter. J. Power Sources 2007, 164, 614–623. [Google Scholar] [CrossRef]
- Luta, D.N.; Raji, A.K. Fuzzy rule-based and particle swarm optimisation MPPT techniques for a fuel cell stack. Energies 2019, 12, 936. [Google Scholar] [CrossRef] [Green Version]
- Fan, L.; Liu, Y. Fuzzy logic based constant power control of a proton exchange membrane fuel cell. Methods 2012, 2, 2. [Google Scholar]
- Li, C.; Sun, Z.; Wang, Y.; Wu, X. Fuzzy sliding mode control of air supply flow of a PEM fuel cell system. Unifying Electr. Eng. Electron. Eng. 2014, 2, 933–942. [Google Scholar]
- Silaa, M.Y.; Barambones, O.; Derbeli, M.; Napole, C.; Bencherif, A. Fractional Order PID Design for a Proton Exchange Membrane Fuel Cell System Using an Extended Grey Wolf Optimizer. Processes 2022, 10, 450. [Google Scholar] [CrossRef]
- Derbeli, M.; Charaabi, A.; Barambones, O.; Napole, C. High-performance tracking for proton exchange membrane fuel cell system PEMFC using model predictive control. Mathematics 2021, 9, 1158. [Google Scholar] [CrossRef]
- Pushkarev, A.S.; Pushkareva, I.; Bessarabov, D.G. Supported Ir-Based Oxygen Evolution Catalysts for Polymer Electrolyte Membrane Water Electrolysis: A Minireview. Energy Fuels 2022, 36, 6613–6625. [Google Scholar] [CrossRef]
- Pourrahmani, H. Water management of the proton exchange membrane fuel cells: Optimizing the effect of microstructural properties on the gas diffusion layer liquid removal. Energy 2022, 256, 124712. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Silaa, M.Y.; Napole, C. Real-time implementation of a new MPPT control method for a DC-DC boost converter used in a PEM fuel cell power system. Actuators 2020, 9, 105. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Turky, R.A.; Alghuwainem, S.; Loo, K.; Elgendy, M. Optimal PEM Fuel Cell Model Using a Novel Circle Search Algorithm. Electronics 2022, 11, 1808. [Google Scholar] [CrossRef]
- Sharma, A.; Khan, R.A.; Sharma, A.; Kashyap, D.; Rajput, S. A Novel Opposition-Based Arithmetic Optimization Algorithm for Parameter Extraction of PEM Fuel Cell. Electronics 2021, 10, 2834. [Google Scholar] [CrossRef]
- Trinh, H.; Truong, H.; Ahn, K.K. Development of Fuzzy-Adaptive Control Based Energy Management Strategy for PEM Fuel Cell Hybrid Tramway System. Appl. Sci. 2022, 12, 3880. [Google Scholar] [CrossRef]
- Belhaj, F.Z.; El Fadil, H.; Idrissi, Z.E.; Koundi, M.; Gaouzi, K. Modeling, analysis and experimental validation of the fuel cell association with DC-DC power converters with robust and anti-windup PID controller design. Electronics 2020, 9, 1889. [Google Scholar] [CrossRef]
- Kularatna, N. Dynamics, models, and management of rechargeable batteries. In Energy Storage Devices for Electronic Systems, Rechargeable Batteries and Supercapacitors; Hillcrest: Hamilton, New Zealand, 2015; pp. 63–135. [Google Scholar]
- Outeiro, M.; Chibante, R.; Carvalho, A.; de Almeida, A.T. Dynamic modeling and simulation of an optimized proton exchange membrane fuel cell system. ASME Int. Mech. Eng. Congr. Expo. 2007, 43092, 171–178. [Google Scholar]
- Benchouia, N.; Hadjadj, A.; Derghal, A.; Khochemane, L.; Mahmah, B. Modeling and validation of fuel cell PEMFC. J. Renew. Energies 2013, 16, 365–377. [Google Scholar]
- Chakraborty, U.K. A new model for constant fuel utilization and constant fuel flow in fuel cells. Appl. Sci. 2019, 9, 1066. [Google Scholar] [CrossRef] [Green Version]
- Derbeli, M.; Farhat, M.; Barambones, O.; Sbita, L. Control of PEM fuel cell power system using sliding mode and super-twisting algorithms. Int. J. Hydrogen Energy 2017, 42, 8833–8844. [Google Scholar] [CrossRef]
- Tiwari, R.; Krishnamurthy, K.; Neelakandan, R.B.; Padmanaban, S.; Wheeler, P. Neural network based maximum power point tracking control with quadratic boost converter for PMSG—Wind energy conversion system. Electronics 2018, 7, 20. [Google Scholar] [CrossRef] [Green Version]
- Silaa, M.Y.; Derbeli, M.; Barambones, O.; Napole, C.; Cheknane, A.; Gonzalez De Durana, J.M. An efficient and robust current control for polymer electrolyte membrane fuel cell power system. Sustainability 2021, 13, 2360. [Google Scholar] [CrossRef]
- Prodic, A.; Maksimovic, D. Design of a digital PID regulator based on look-up tables for control of high-frequency DC-DC converters. In Proceedings of the 2002 IEEE Workshop on Computers in Power Electronics, Mayaguez, PR, USA, 3–4 June 2002; pp. 18–22. [Google Scholar]
- Shyla, S.; Bhatnagar, V.; Bali, V.; Bali, S. Optimization of Intrusion Detection Systems Determined by Ameliorated HNADAM-SGD Algorithm. Electronics 2022, 11, 507. [Google Scholar] [CrossRef]
- Yaqub, M.; Feng, J.; Zia, M.S.; Arshid, K.; Jia, K.; Rehman, Z.U.; Mehmood, A. State-of-the-art CNN optimizer for brain tumor segmentation in magnetic resonance images. Brain Sci. 2020, 10, 427. [Google Scholar] [CrossRef]
- Sutskever, I.; Martens, J.; Dahl, G.; Hinton, G. On the importance of initialization and momentum in deep learning. Int. Conf. Mach. Learn. 2013, 1139–1147. [Google Scholar]
- Sun, Y.; Liu, Y.; Zhou, H.; Hu, H. Plant diseases identification through a discount momentum optimizer in deep learning. Appl. Sci. 2021, 11, 9468. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Jegha, A.G.; Subathra, M.; Kumar, N.M.; Ghosh, A. Optimally tuned interleaved Luo converter for PV array fed BLDC motor driven centrifugal pumps using whale optimization algorithm—A resilient solution for powering agricultural loads. Electronics 2020, 9, 1445. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, G.; Jiao, S.; Wang, J. Bearing Fault Diagnosis Based on Stochastic Resonance and Improved Whale Optimization Algorithm. Electronics 2022, 11, 2185. [Google Scholar] [CrossRef]
- Gharehchopogh, F.S.; Gholizadeh, H. A comprehensive survey: Whale Optimization Algorithm and its applications. Swarm Evol. Comput. 2019, 48, 1–24. [Google Scholar] [CrossRef]
- Pereira, L.F.d.S.; Batista, E.; de Brito, M.A.; Godoy, R.B. A Robustness Analysis of a Fuzzy Fractional Order PID Controller Based on Genetic Algorithm for a DC-DC Boost Converter. Electronics 2022, 11, 1894. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Cogging torque reduction in brushless motors by a nonlinear control technique. Mathematics 2019, 12, 2224. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| A | 162 cm2 |
| l | 175 · cm |
| 23 | |
| V | |
| A·cm−1 | |
| 10 | |
| V | |
| V/K | |
| V/K | |
| V/K |
| Variable | Meaning |
|---|---|
| Hydrogen valve molar constant (kmol/atm·s) | |
| Oxygen valve molar constant (kmol/atm·s) | |
| Hydrogen time constant (s) | |
| Oxygen time constant (s) | |
| Molar flow rate of hydrogen (Kmol/s) | |
| Molar flow rate of oxygen (Kmol/s) | |
| Modeling constant (Kmol/s·A) | |
| R | Universal gas constant (1·atm/Kmol·K) |
| Volume of the anode (cm3) |
| Parameter | Value |
|---|---|
| Inductance (L) | H |
| Capacitor (C) | F |
| Max | 10 kHz |
| Max in voltage | 25 V |
| Max in current | 18 A |
| Max out voltage | 80 V |
| Max out current | 2 A |
| Algorithm | Range | |||
|---|---|---|---|---|
| WOA | Min | 0 | 0 | 0 |
| Max | 1 | 1 | 1 |
| Controller | |||||||
|---|---|---|---|---|---|---|---|
| PIDSGDM | - | - | - | ||||
| PIDSGD | - | - | - | - | |||
| PID-ZN | - | - | - | - |
| Work | Response Time (s) | Overshoot % | Undershoot % | Controller |
|---|---|---|---|---|
| Proposed | 93 | 94 | PIDSGDM and PID-ZN | |
| [20] | 46 | QC-HOSM and SMC | ||
| [43] | IFTSMC and PI | |||
| [23] | 34 | HOSMC-TA and SMC | ||
| [7] | 1 | 33 | 33 | STA and SMC |
| [29] | MPC and PI |
| Algorithm | Time | Calls | Time/Call | Self Time |
|---|---|---|---|---|
| PIDSGDM | 0.058–1.22% | 600127 | 0.057–2.19% | |
| PIDSGD | 0.051–1.07% | 570155 | 0.048–1.84% | |
| PID-ZN | 0.020–0.88% | 18005 | 0.0020–0.33% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silaa, M.Y.; Barambones, O.; Bencherif, A. A Novel Adaptive PID Controller Design for a PEM Fuel Cell Using Stochastic Gradient Descent with Momentum Enhanced by Whale Optimizer. Electronics 2022, 11, 2610. https://doi.org/10.3390/electronics11162610
Silaa MY, Barambones O, Bencherif A. A Novel Adaptive PID Controller Design for a PEM Fuel Cell Using Stochastic Gradient Descent with Momentum Enhanced by Whale Optimizer. Electronics. 2022; 11(16):2610. https://doi.org/10.3390/electronics11162610
Chicago/Turabian StyleSilaa, Mohammed Yousri, Oscar Barambones, and Aissa Bencherif. 2022. "A Novel Adaptive PID Controller Design for a PEM Fuel Cell Using Stochastic Gradient Descent with Momentum Enhanced by Whale Optimizer" Electronics 11, no. 16: 2610. https://doi.org/10.3390/electronics11162610