
The Closed-Loop Control of the Half-Bridge-Based MMC Drive with Variable DC-Link Voltage

 , ,
, ,  ,
, 
Abstract
:1. Introduction
- A small-signal model is developed to fully analyze the dynamics of the MMC when the magnitude of the DC port voltage E is modified.
- A closed-loop control system is proposed for MMC-based drives. Using this scheme, the DC port voltage is modified considering the dynamics of the capacitor voltages and not only steady-state expressions.
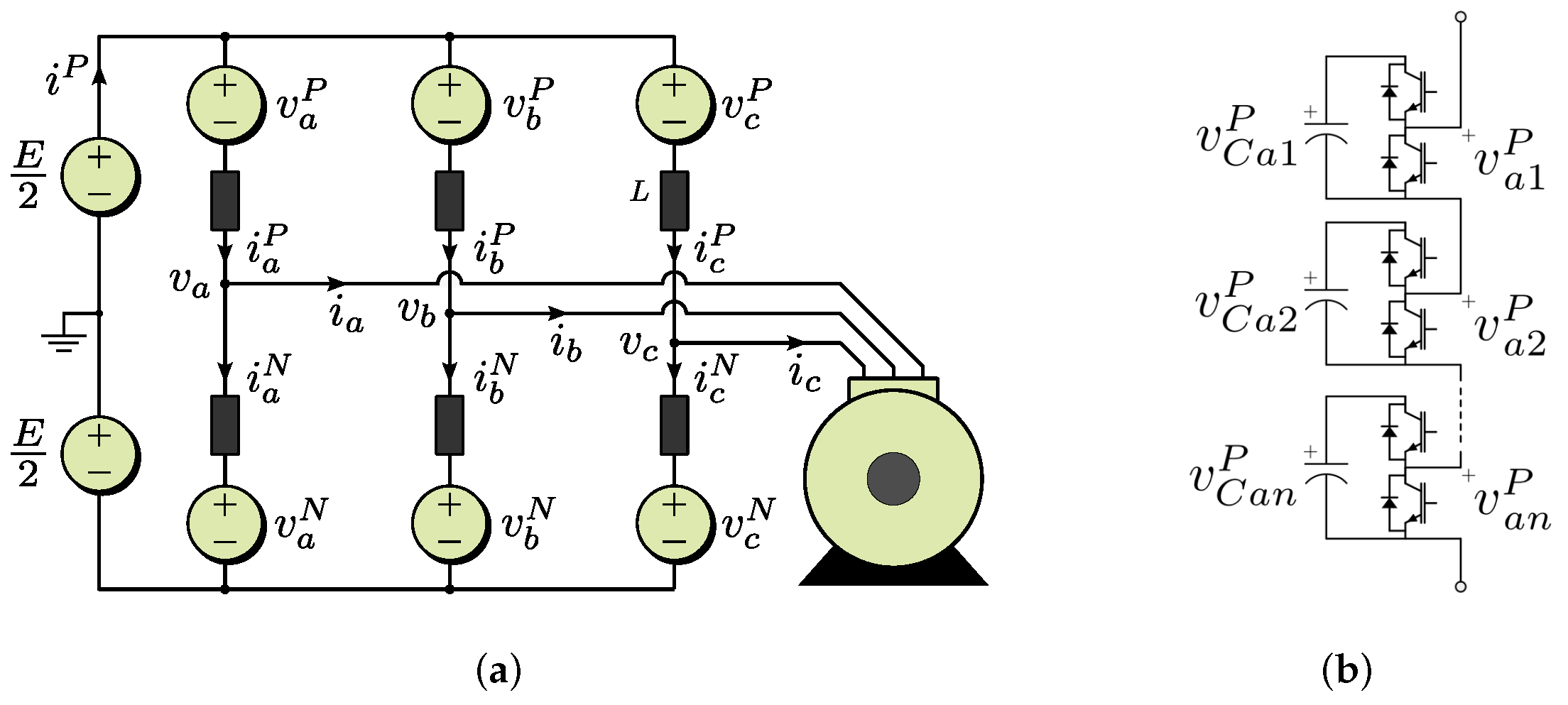
2. Conventional Modeling of the MMC
3. Proposed Modeling and Design Approach
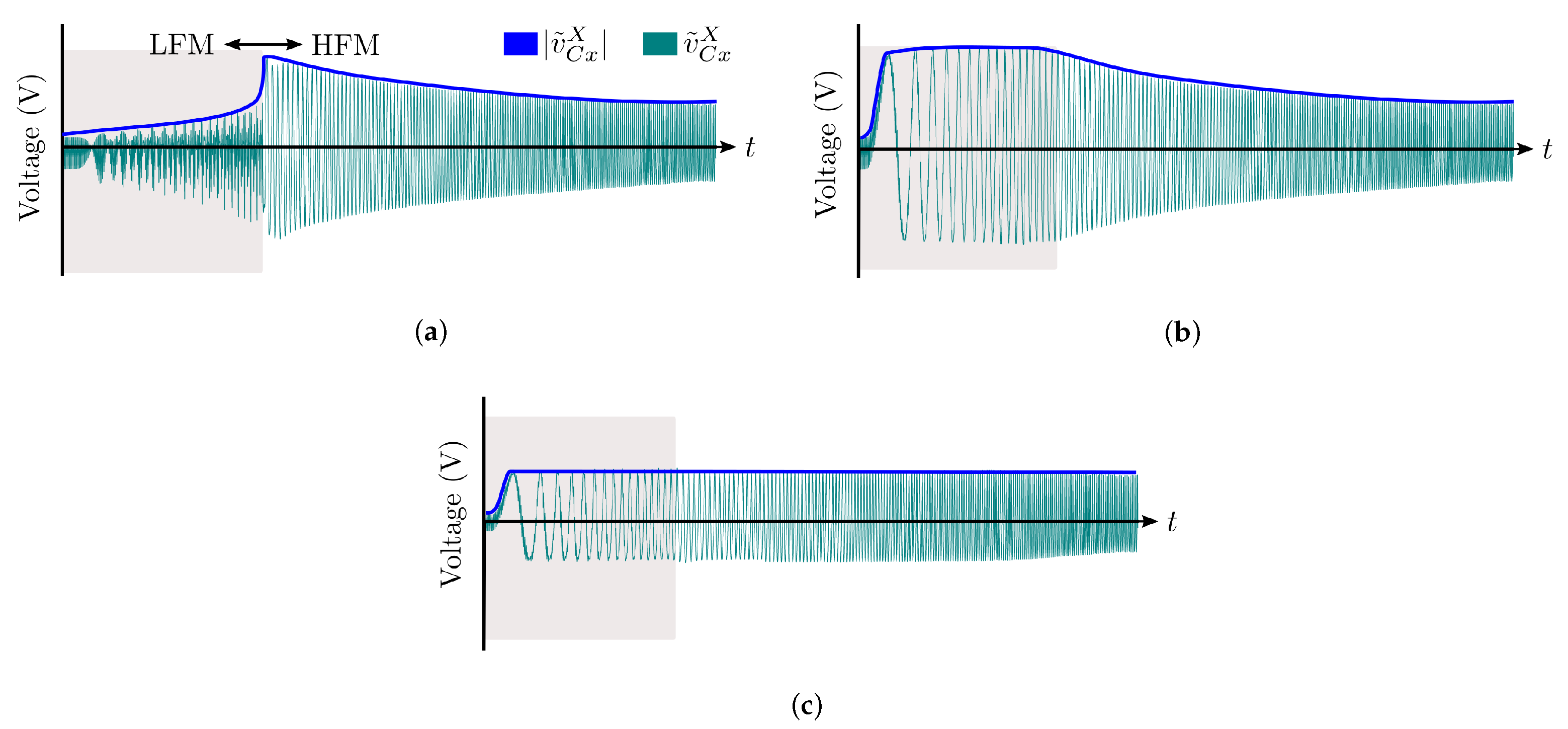
3.1. Influence of the DC Port Voltage on the MMC Behavior
3.2. Restrictions in the Variation of the DC Port Voltage
- 1.
- The MMC clusters have to synthesize positive voltages with a mean value of ; thus, very low values of E compromise the quality of the output voltage and then the broader controllability of the MMC.
- 2.
- As the input power must always be ensured, large values of the DC port current () could result if E is severely reduced, which could increase the conduction losses or cause the oversizing of the converter.
- 3.
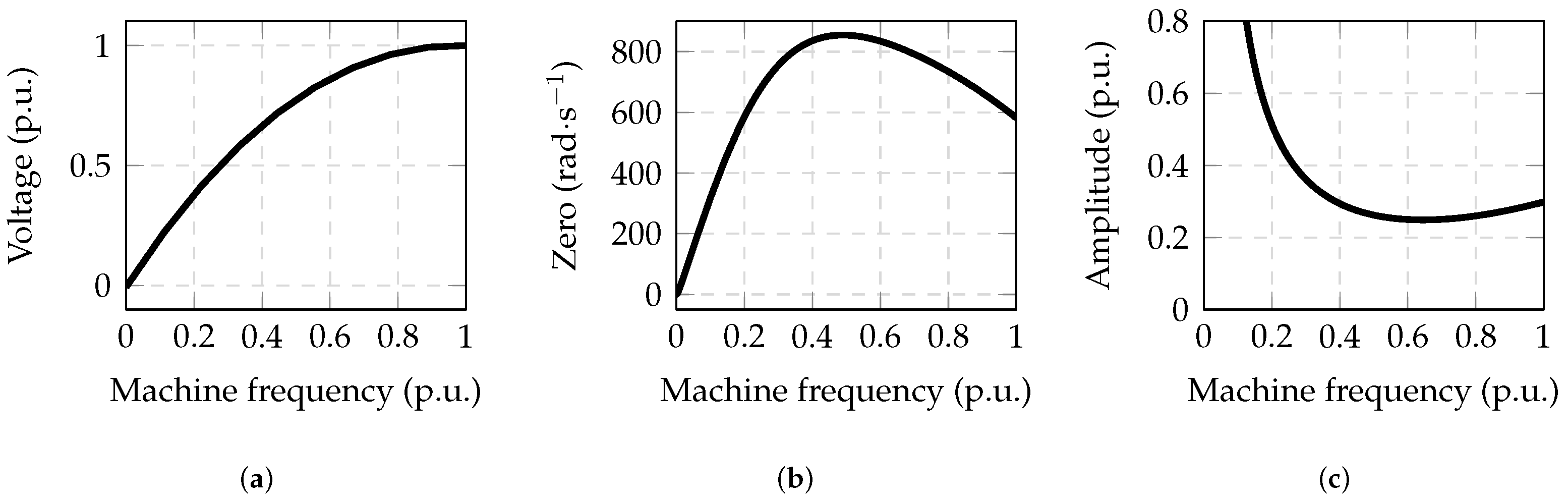
- Small changes in E produce large changes in when the converter operates at very low frequencies (see Figure 3c). Therefore, the sensibility of the control system could be compromised.
3.3. Design Procedure
- Given a machine and application, determine , , and as a function of .
- According to the maximum value of , design the number of cells (n), the mean value of the capacitor voltages (), and the nominal DC port voltage ().
- must be high enough to synthesize the output voltage required by the clusters.
- Define . Notice that remains constant if the product is also constant (see (30)), reflecting the trade-off between the cell capacitance and the voltage fluctuations in the capacitors.
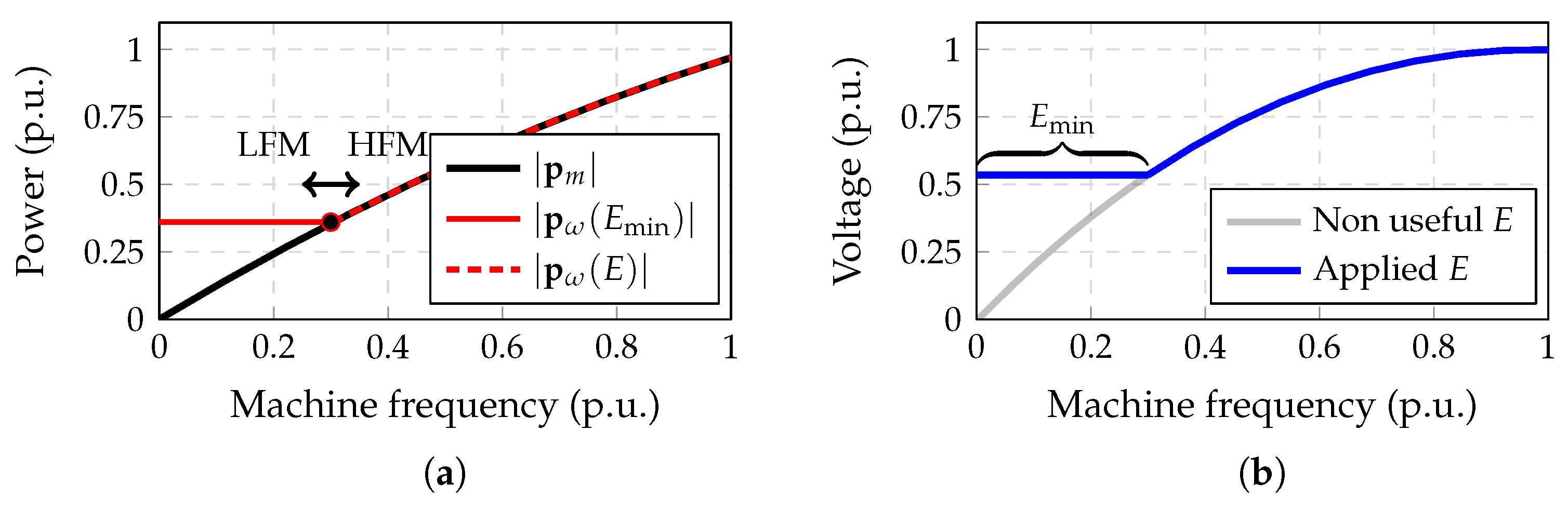
- Plot and and determinate the intersection point (see the solid red and black lines in Figure 4a, which is based on the system described in Table 1). This point is the nominal transition between the LFM and HFM, which could be modified by changing the product or the value of . Notice that after the transition point (see the dashed red line of Figure 4a).
- Solve for E. The blue line in Figure 4b shows the DC port voltage obtained in this example. Notice that the low limit E is (see the gray line).
- Compute the model (21) by using the information of the system variables and tune a proper controller to regulate . The value of E of the previous step can be stored in a look-up table and used for feed-forward purposes. Considering the low damping and the changes in the model parameters, algorithms for active damping or robust tuning rules can be applied, as presented in the next section.
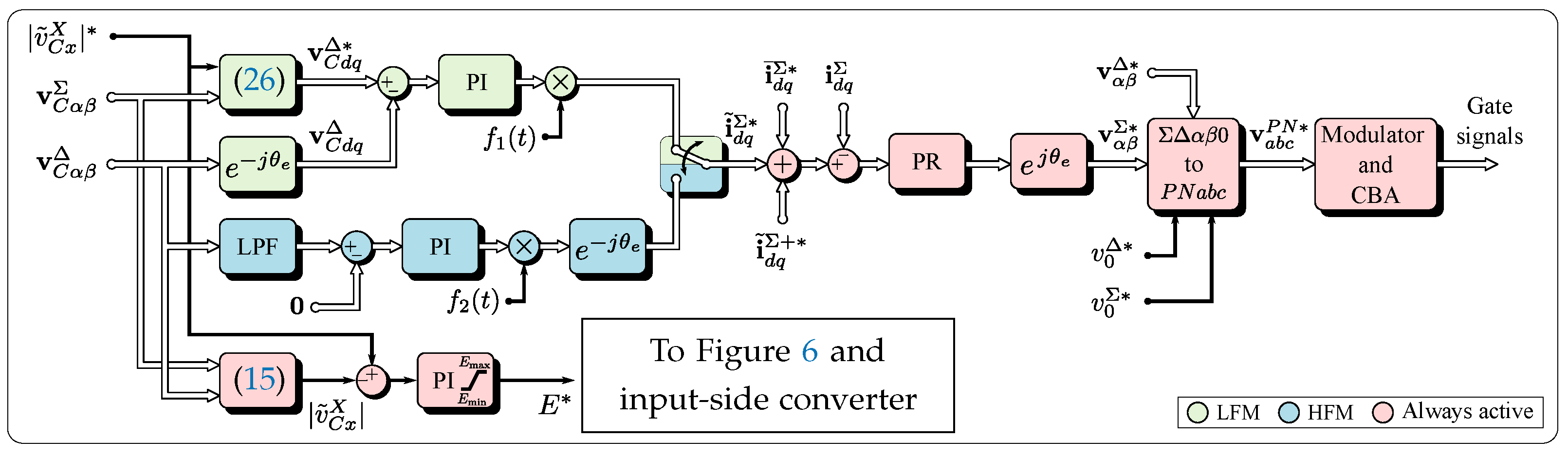
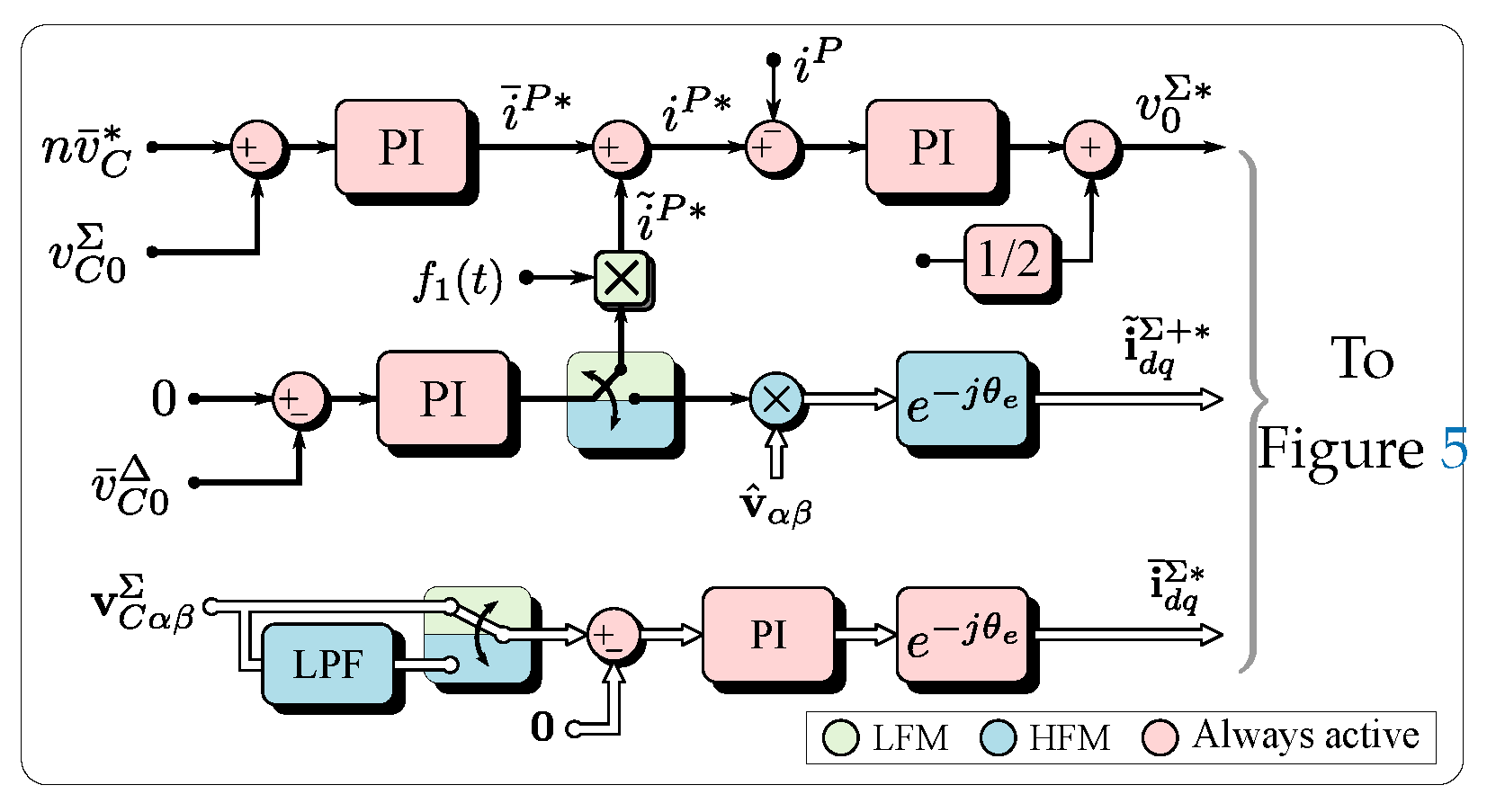
4. Proposed Control System
- 1.
- During LFM, the green blocks in Figure 5 use the margin-based method to keep them constant (i.e., by injecting circulating currents). In this mode, the PI controller that manipulates the DC port voltage is saturated to its minimum value .
- 2.
- When the system operates in HFM, this controller is not saturated and it modifies to ensure the desired value of the voltage fluctuation in the capacitors, considering the dynamic relation between them and the DC port voltage (see Section 3.1 and Equation (21)).
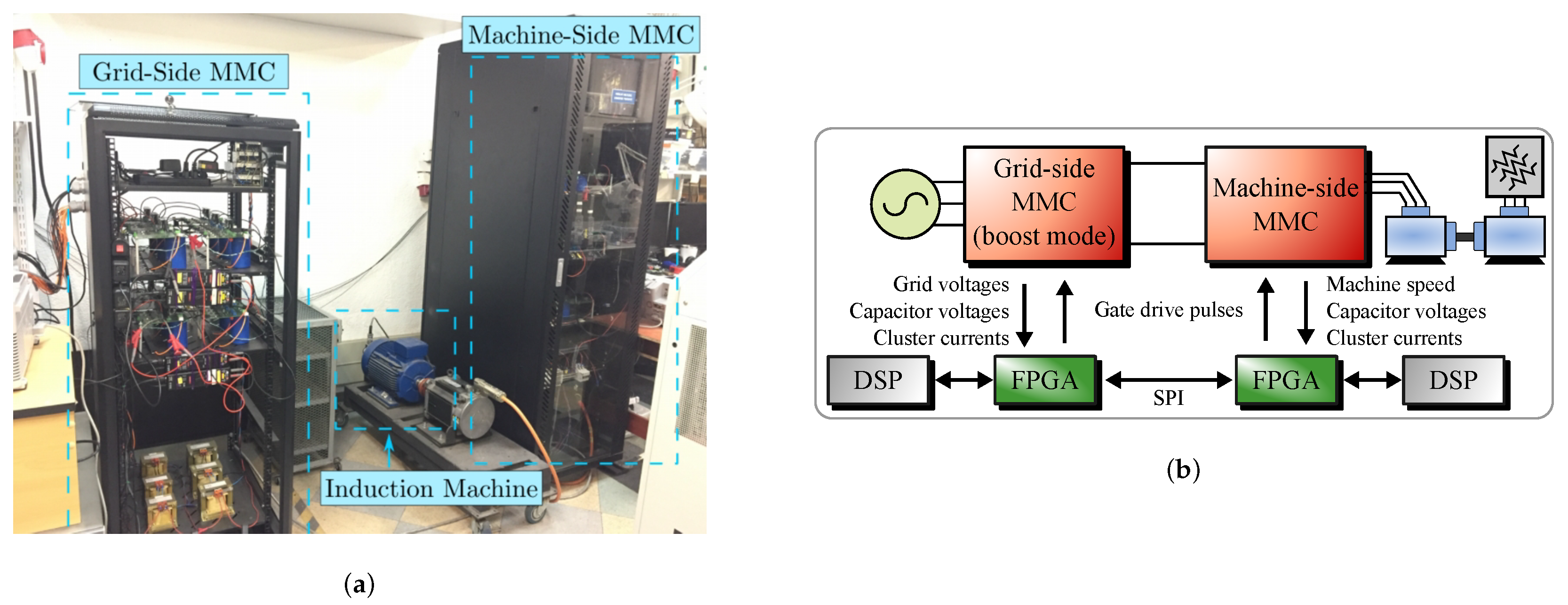
5. Experimental Results
5.1. Steady-State Comparison with a Conventional Method
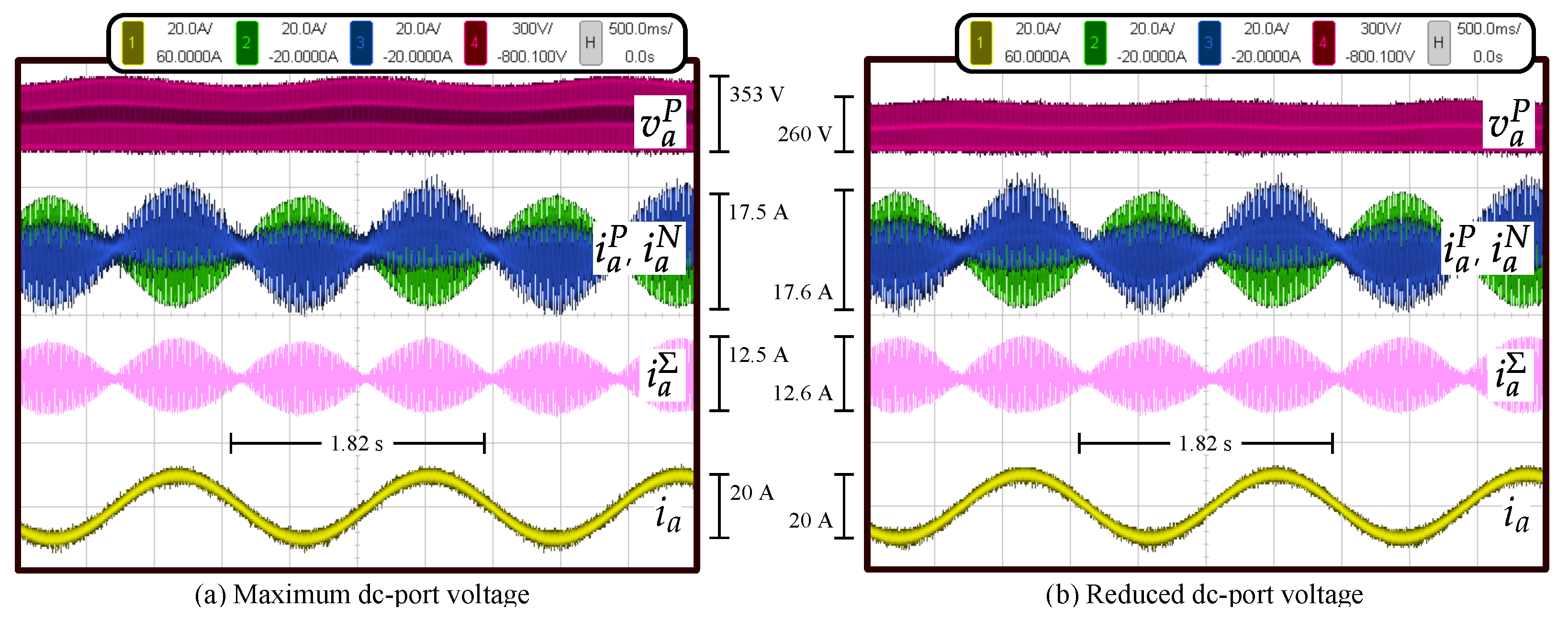
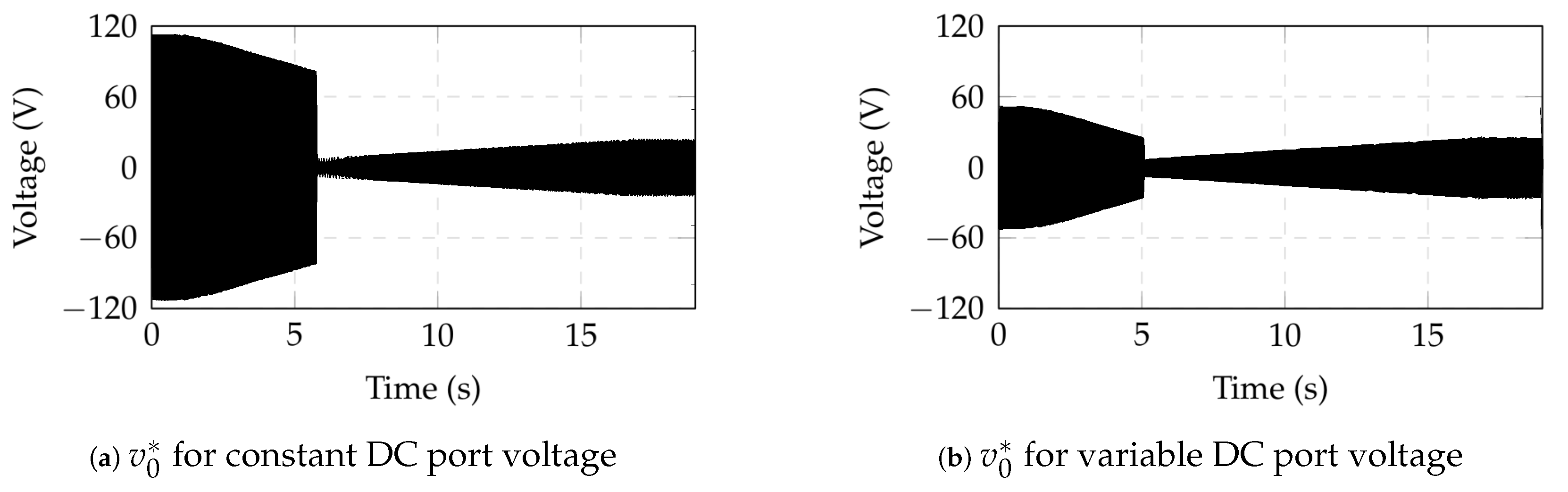
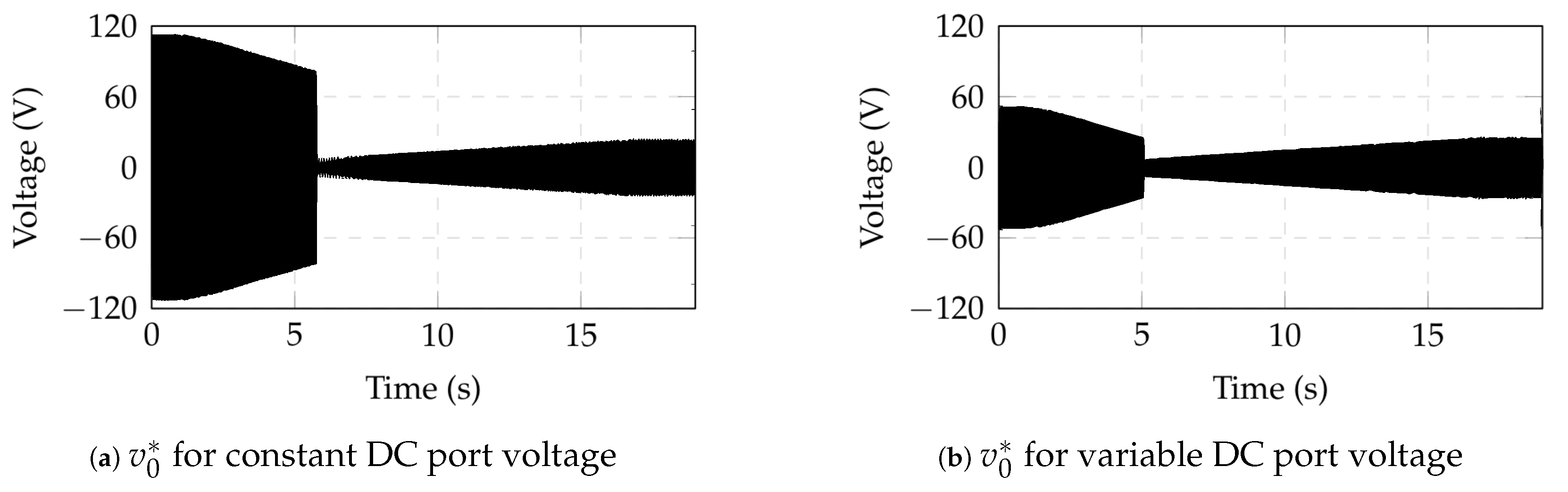
5.2. Experimental Comparison of the Dynamic Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Korn, A.J.; Winkelnkemper, M.; Steimer, P.; Kolar, J.W. Direct modular multi-level converter for gearless low-speed drives. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–7. [Google Scholar]
- Espinoza, M.; Cardenas, R.; Clare, J.; Soto, D.; Diaz, M.; Espina, E.; Hackl, C. An Integrated Converter and Machine Control System for MMC-Based High Power Drives. IEEE Trans. Ind. Electron. 2018, 66, 2343–2354. [Google Scholar] [CrossRef]
- Hagiwara, M.; Hasegawa, I.; Akagi, H. Start-Up and Low-Speed Operation of an Electric Motor Driven by a Modular Multilevel Cascade Inverter. IEEE Trans. Ind. Appl. 2014, 49, 1556–1565. [Google Scholar] [CrossRef]
- Korn, A.J.; Winkelnkemper, M.; Steimer, P. Low Output Frequency Operation of the Modular Multi-Level Converter. In Proceedings of the Energy Conversion Congress and Exposition (ECCE), Atlanta, GA, USA, 12–16 September 2010. [Google Scholar]
- Espinoza, M.; Cárdenas, R.; Díaz, M.; Clare, J.C. An Enhanced dq-Based Vector Control System for Modular Multilevel Converters Feeding Variable-Speed Drives. Ind. Electron. IEEE Trans. 2017, 64, 2620–2630. [Google Scholar] [CrossRef]
- Kolb, J.; Kammerer, F.; Gommeringer, M.; Braun, M. Cascaded Control System of the Modular Multilevel Converter for Feeding Variable-Speed Drives. Power Electron. IEEE Trans. 2015, 30, 349–357. [Google Scholar] [CrossRef]
- Okazaki, Y.; Kawamura, W.; Hagiwara, M.; Akagi, H.; Ishida, T.; Tsukakoshi, M.; Nakamura, R. Experimental Comparisons Between Modular Multilevel DSCC Inverters and TSBC Converters for Medium-Voltage Motor Drives. IEEE Trans. Power Electron. 2017, 32, 1805–1817. [Google Scholar] [CrossRef]
- Ilves, K.; Bessegato, L.; Norrga, S. Comparison of cascaded multilevel converter topologies for AC/AC conversion. In Proceedings of the Power Electronics Conference (IPEC-Hiroshima 2014—ECCE-ASIA), 2014 International, Hiroshima, Japan, 18–21 May 2014; pp. 1087–1094. [Google Scholar]
- Espinoza, M.; Espina, E.; Diaz, M.; Cárdenas, R. Control Strategies for Modular Multilevel Converters Driving Cage Machines. In Proceedings of the IEEE 3rd Southern Power Electronics Conference (SPEC), 2017, Puerto Varas, Chile, 4–7 December 2017; pp. 1–6. [Google Scholar]
- Li, B.; Zhou, S.; Xu, D.; Yang, R.; Xu, D.; Buccella, C.; Cecati, C. An Improved Circulating Current Injection Method for Modular Multilevel Converters in Variable-Speed Drives. Ind. Electron. IEEE Trans. 2016, 63, 7215–7225. [Google Scholar] [CrossRef]
- Guan, M.; Li, B.; Zhou, S.; Xu, Z.; Xu, D. Back-to-back hybrid modular multilevel converters for ac motor drive. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 1822–1827. [Google Scholar] [CrossRef]
- Sau, S.; Fernandes, B.G. Modular multilevel converter based variable speed drives with constant capacitor ripple voltage for wide speed range. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 2073–2078. [Google Scholar] [CrossRef]
- Espinoza, M.; Donoso, F.; Diaz, M.; Letelier, A.; Cardenas, R. Control and Operation of the MMC-Based Drive with Reduced Capacitor Voltage Fluctuations. In Proceedings of the Power Electronics, Machines and Drives (PEMD), 9th International Conference on, Liverpool, UK, 17–19 April 2018. [Google Scholar]
- Kumar, Y.S.; Poddar, G. Control of Medium-Voltage AC Motor Drive for Wide Speed Range Using Modular Multilevel Converter. IEEE Trans. Ind. Electron. 2017, 64, 2742–2749. [Google Scholar] [CrossRef]
- Kumar, Y.S.; Poddar, G. Medium-Voltage Vector Control Induction Motor Drive at Zero Frequency Using Modular Multilevel Converter. IEEE Trans. Ind. Electron. 2018, 65, 125–132. [Google Scholar] [CrossRef]
- Zhang, M.L.; Wu, B.; Xiao, Y.; Dewinter, F.A.; Sotudeh, R. A multilevel buck converter based rectifier with sinusoidal inputs and unity power factor for medium voltage (4160–7200 V) applications. IEEE Trans. Power Electron. 2002, 17, 853–863. [Google Scholar] [CrossRef]
- Abdelsalam, I.; Adam, G.P.; Holliday, D.; Williams, B.W. Single-stage ac-dc buck-boost converter for medium-voltage high-power applications. IET Renew. Power Gener. 2016, 10, 184–193. [Google Scholar] [CrossRef] [Green Version]
- Judge, P.D.; Chaffey, G.; Merlin, M.M.C.; Clemow, P.R.; Green, T.C. Dimensioning and Modulation Index Selection for the Hybrid Modular Multilevel Converter. IEEE Trans. Power Electron. 2018, 33, 3837–3851. [Google Scholar] [CrossRef] [Green Version]
- Donoso, F.; Cardenas, R.; Espinoza, M.; Clare, J.; Mora, A.; Watson, A. Experimental Validation of a Nested Control System to Balance the Cell Capacitor Voltages in Hybrid MMCs. IEEE Access 2021, 9, 21965–21985. [Google Scholar] [CrossRef]
- Busse, D.; Erdman, J.; Kerkman, R.J.; Schlegel, D.; Skibinski, G. System electrical parameters and their effects on bearing currents. IEEE Trans. Ind. Appl. 1997, 33, 577–584. [Google Scholar] [CrossRef]
- Du, S.; Wu, B.; Zargari, N.R. Common-Mode Voltage Elimination for Variable-Speed Motor Drive Based on Flying-Capacitor Modular Multilevel Converter. IEEE Trans. Power Electron. 2018, 33, 5621–5628. [Google Scholar] [CrossRef]
- Kolb, J.; Kammerer, F.; Braun, M. Dimensioning and design of a Modular Multilevel Converter for drive applications. In Proceedings of the Power Electronics and Motion Control Conference (EPE/PEMC), 2012 15th International, Novi Sad, Serbia, 4–6 September 2012; pp. LS1a–1.1–1–LS1a–1.1–8. [Google Scholar]
- Espinoza, M.; Rojas, J.D.; Vilanova, R.; Arrieta, O. Robustness/performance tradeoff for anisochronic plants with two degrees of freedom PID controllers. In Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, Australia, 21–23 September 2015; pp. 1230–1235. [Google Scholar]
- Espinoza, M.; Cárdenas, R.; Diaz, M.; Mora, A.; D, S. Modelling and Control of the Modular Multilevel Converter in Back to Back Configuration for High Power Induction Machine Drives. In Proceedings of the IECON 2016–42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 24–27. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Nominal DC port voltage | E | 300 | V |
| Cluster inductor | L | 2.5 | mH |
| Cell capacitor | C | 4700 | F |
| Cell DC voltage | 100 | V | |
| Cell count per cluster | n | 3 | – |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Espinoza, M.; Diaz, M.; Espina, E.; Mora, A.; Letelier, A.; Donoso, F.; Cárdenas, R. The Closed-Loop Control of the Half-Bridge-Based MMC Drive with Variable DC-Link Voltage. Electronics 2023, 12, 2791. https://doi.org/10.3390/electronics12132791
Espinoza M, Diaz M, Espina E, Mora A, Letelier A, Donoso F, Cárdenas R. The Closed-Loop Control of the Half-Bridge-Based MMC Drive with Variable DC-Link Voltage. Electronics. 2023; 12(13):2791. https://doi.org/10.3390/electronics12132791
Chicago/Turabian StyleEspinoza, Mauricio, Matias Diaz, Enrique Espina, Andrés Mora, Arturo Letelier, Felipe Donoso, and Roberto Cárdenas. 2023. "The Closed-Loop Control of the Half-Bridge-Based MMC Drive with Variable DC-Link Voltage" Electronics 12, no. 13: 2791. https://doi.org/10.3390/electronics12132791