

Applications of the TL-Based Fault Diagnostic System for the Capacitor in Hybrid Aircraft
 , , , , ,
, , , , ,  and
and
Abstract
:1. Introduction
2. Capacitor Fault Detection System Using Transfer Learning—Data Development
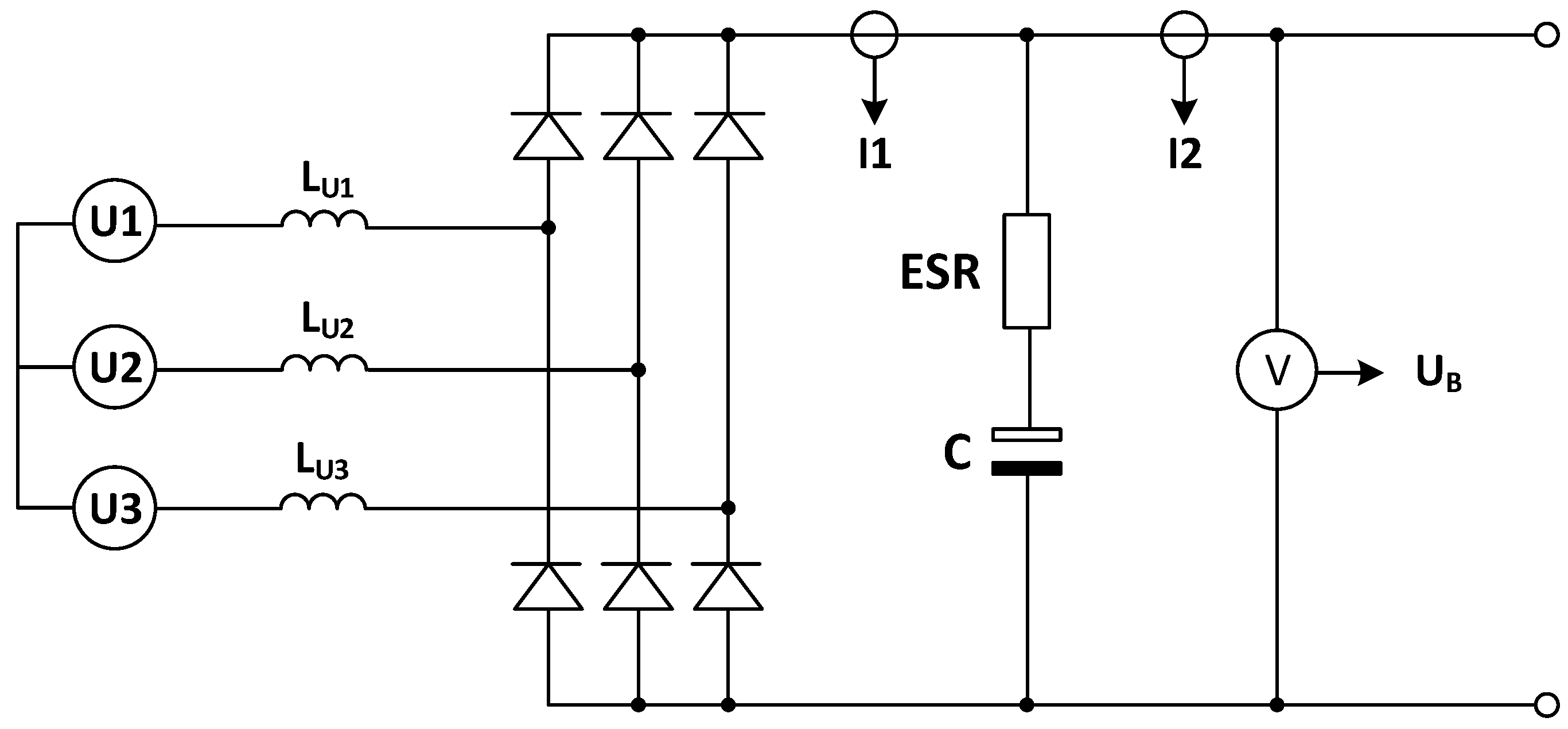
2.1. Physical and Simulink-Designed Model of the Experimental Bench
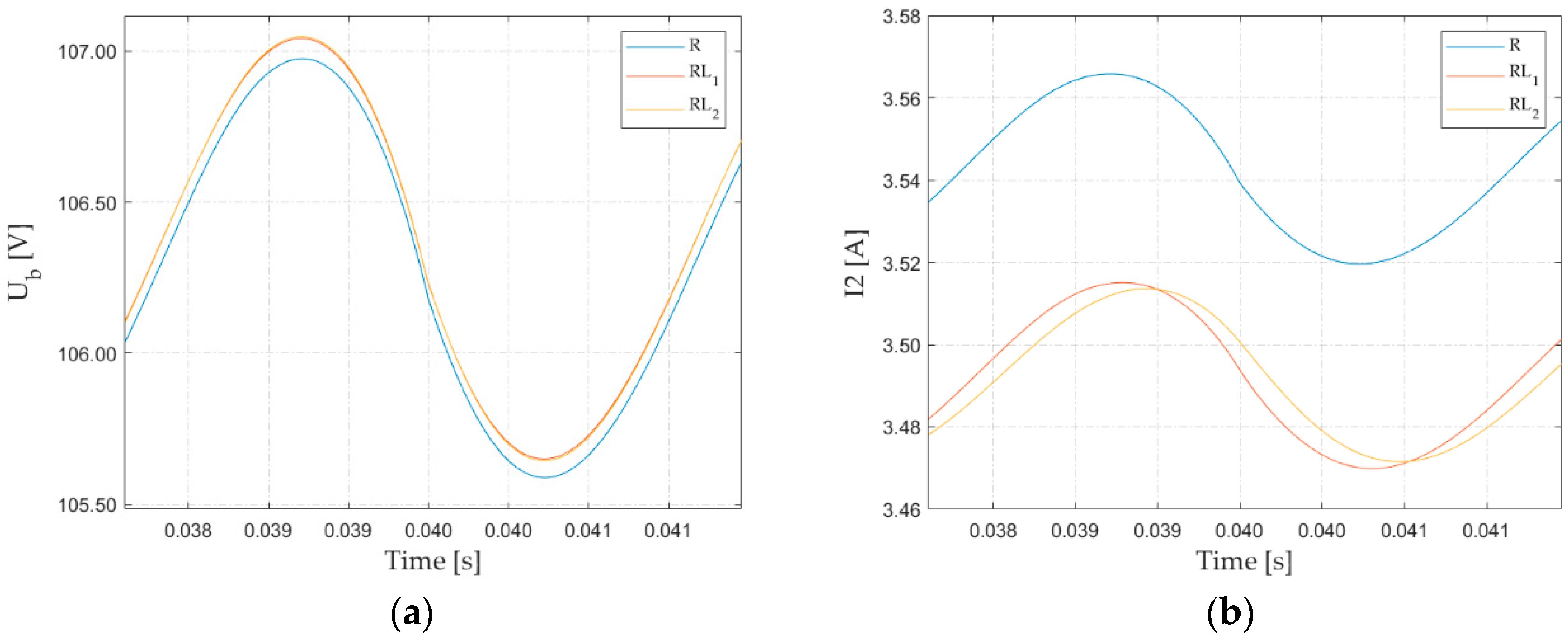
- R (R = 30.45 Ω);
- RL1 (R = 30.45 Ω, L = 2.5 mH);
- RL2 (R = 30.45 Ω, L = 7.5 mH).
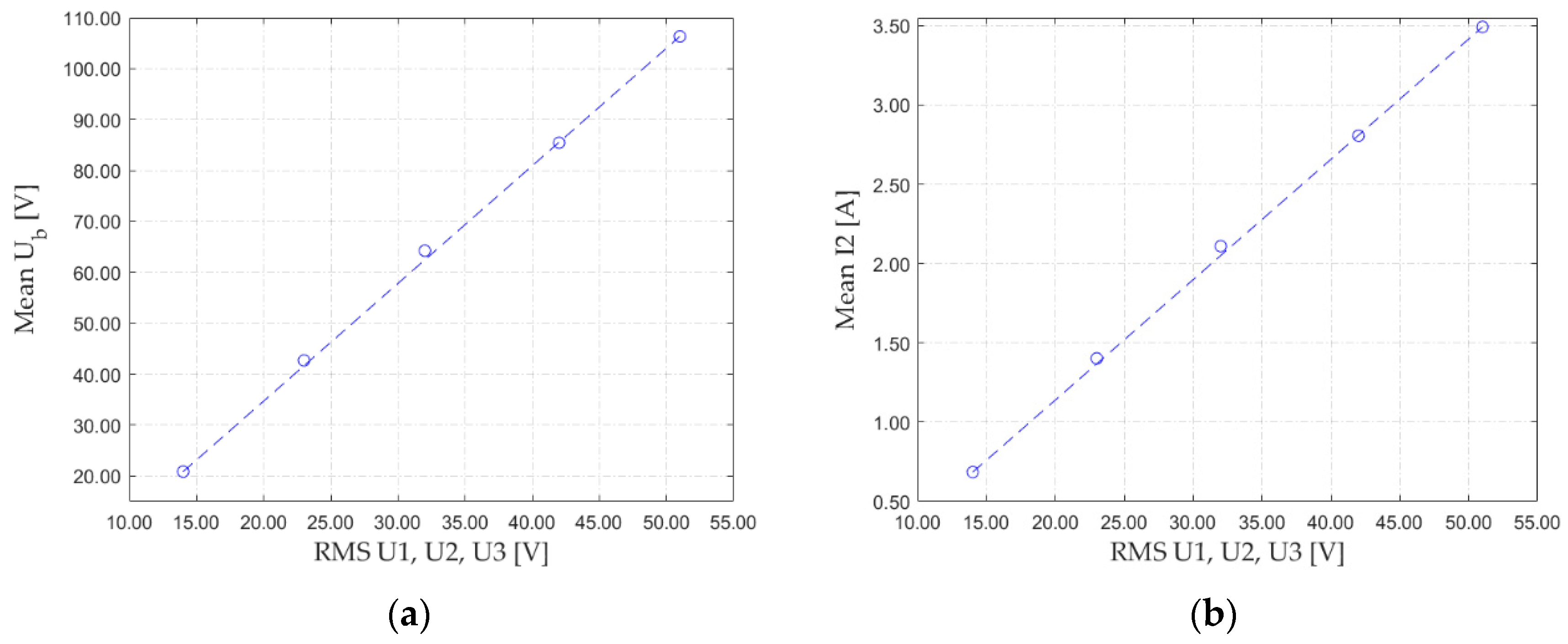
- U1 = U2 = U3 = 14 V;
- U1 = U2 = U3 = 23 V;
- U1 = U2 = U3 = 32 V;
- U1 = U2 = U3 = 42 V;
- U1 = U2 = U3 = 51 V.
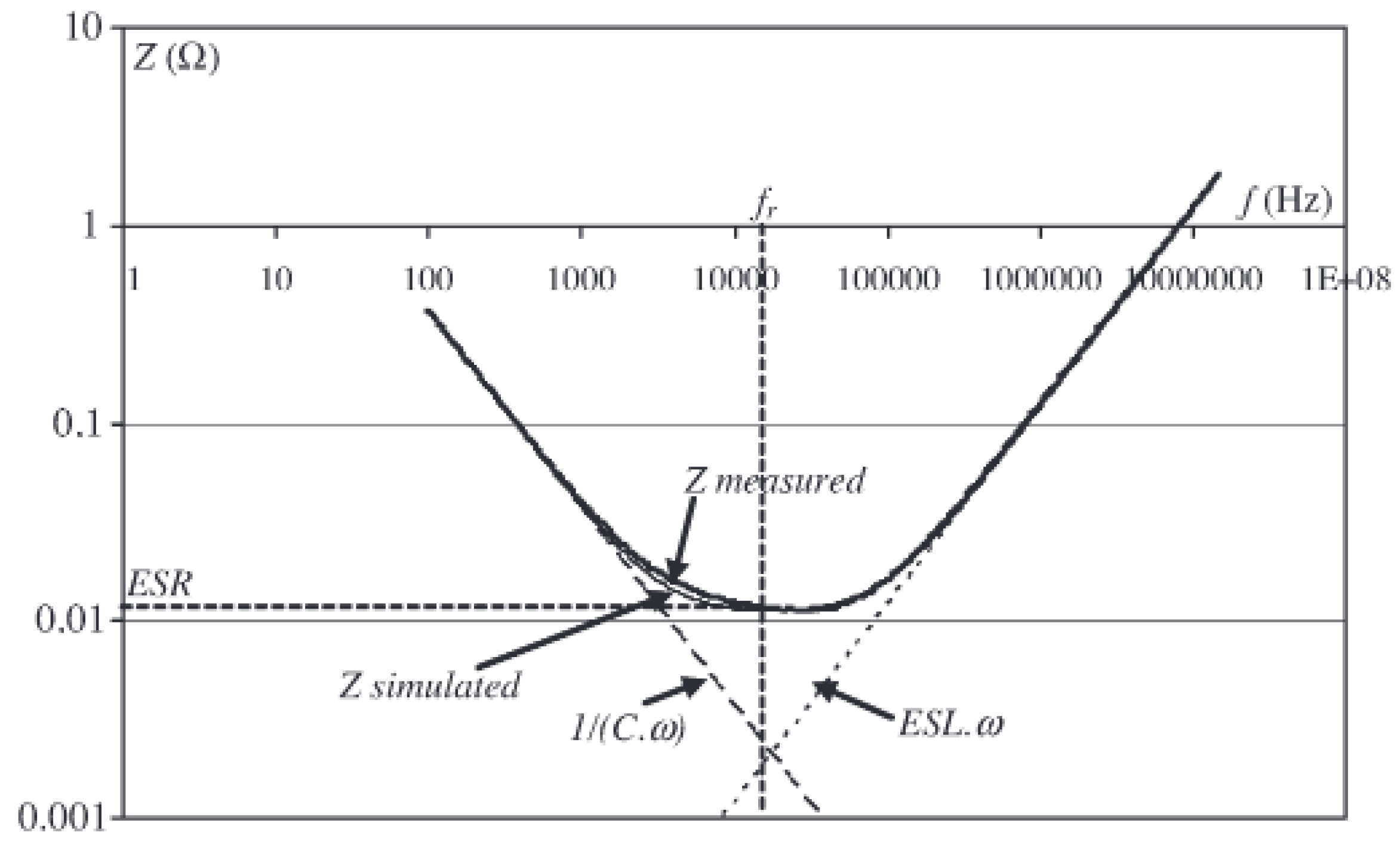
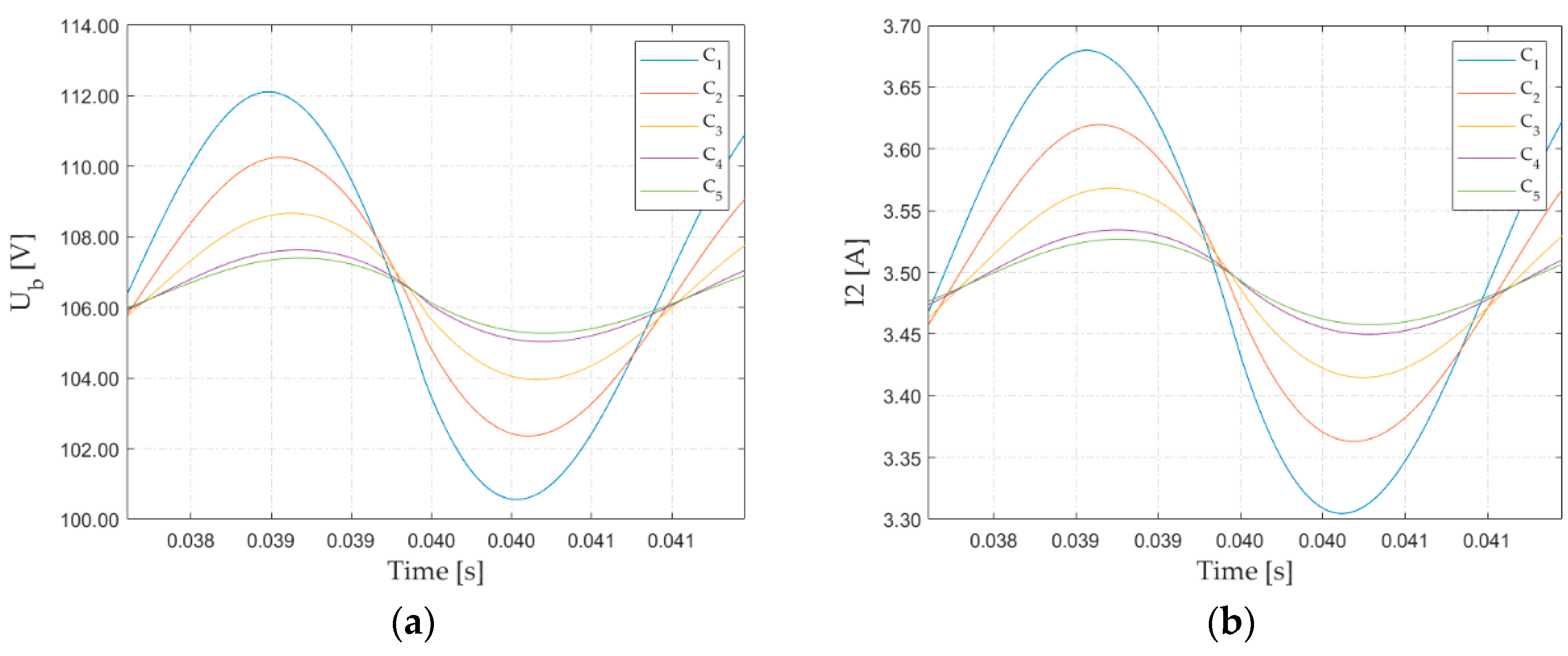
- C1 = 103.3 μF;
- C2 = 137.4 μF;
- C3 = 207.3 μF;
- C4 = 346.2 μF;
- C5 = 414.3 μF.
2.2. Validation of the Simulink-Designed Model
3. Convolutional Neural Network-Based Diagnostic System Using Transfer Learning
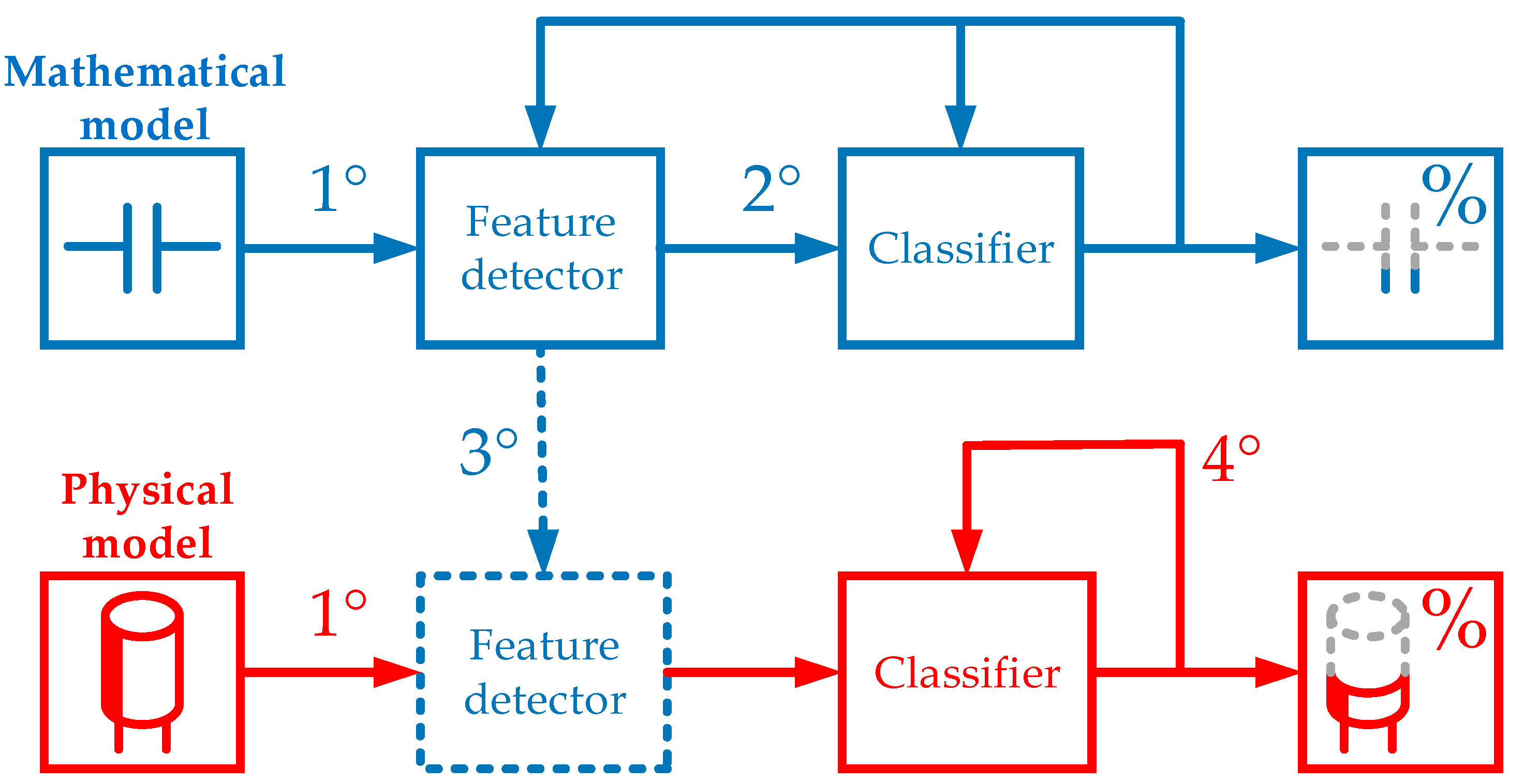
3.1. Idea of Transfer Learning
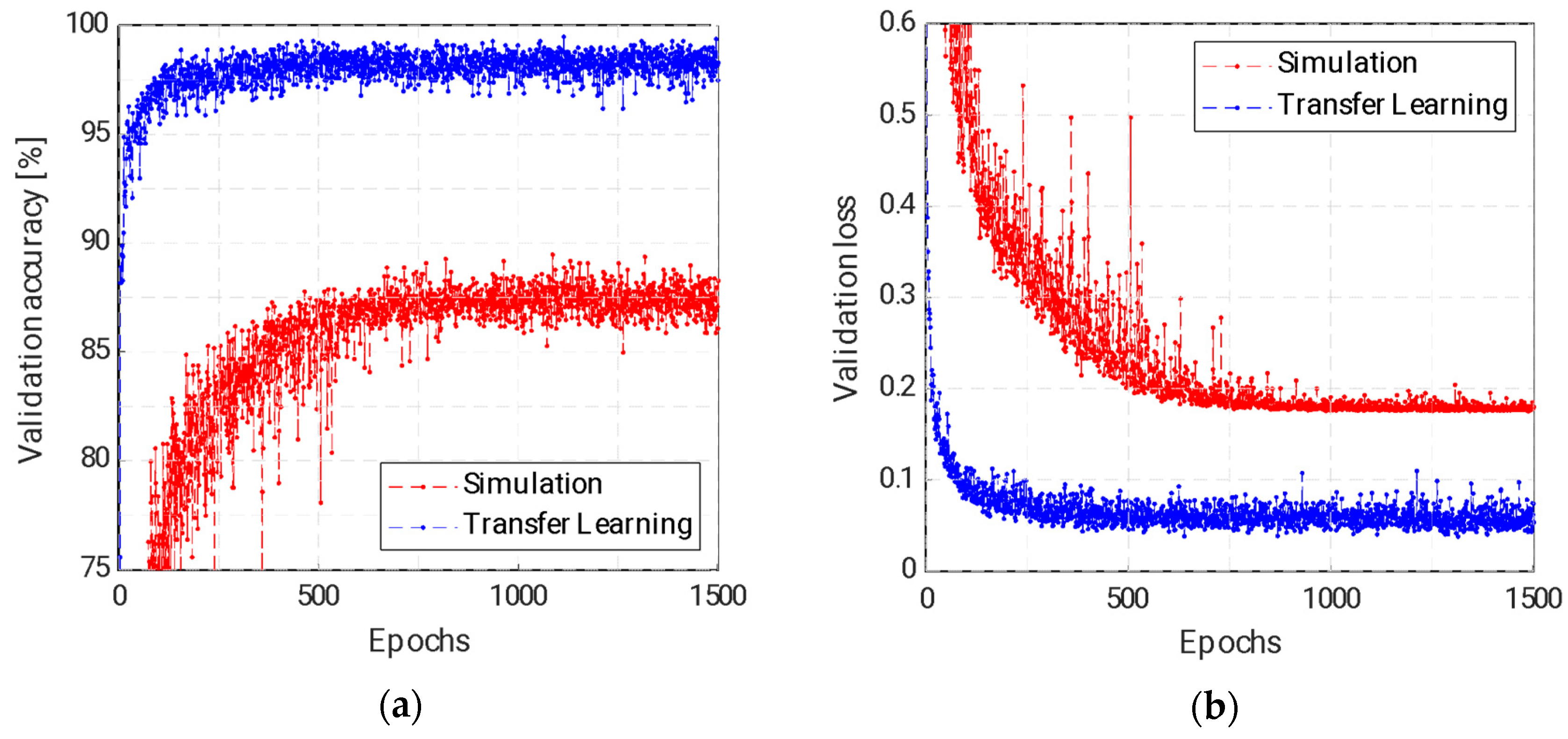
3.2. Convolutional Network Training Process According to Transfer Learning
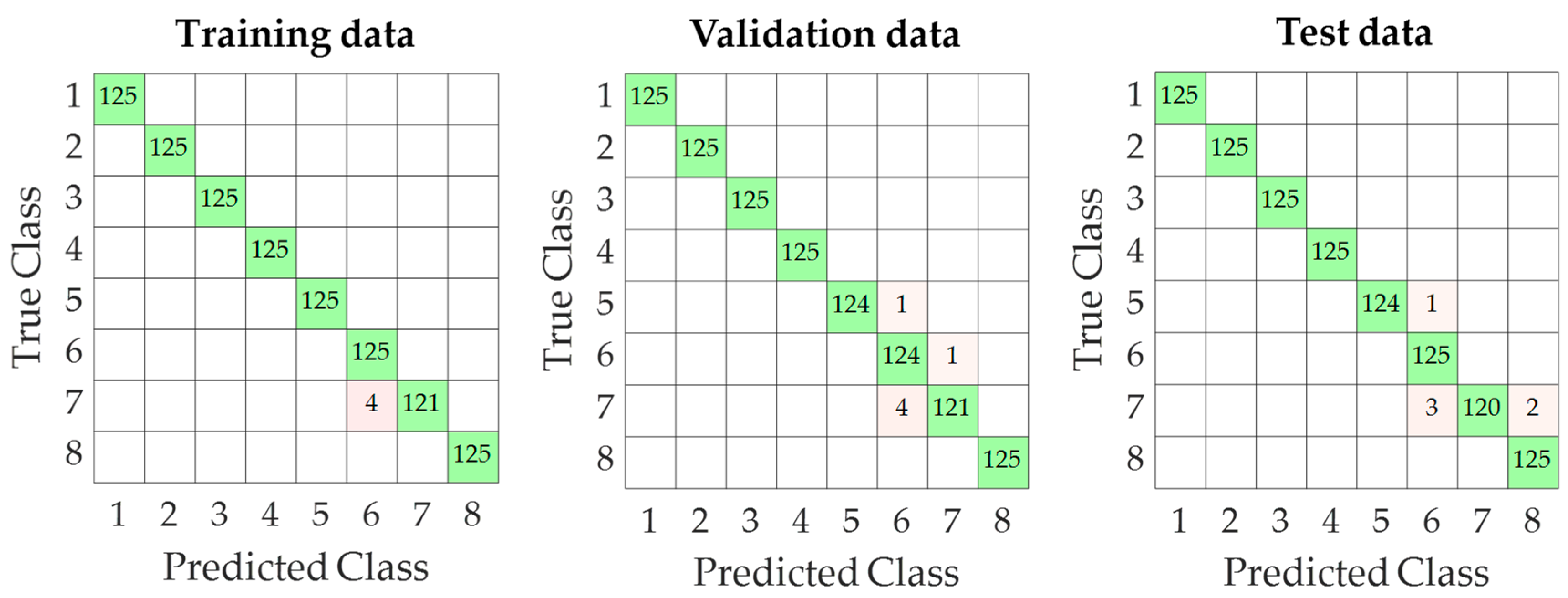
4. Experimental Verification of the Proposed Diagnostic Method
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Clean Hydrogen Joint Undertaking. Strategic Research and Innovation Agenda 2021–2027; Clean Hydrogen Partnership: Brussels, Belgium, 2021. [Google Scholar]
- Undertaking, Clean Hydrogen Joint. 1st Call for Proposals: List and Description of Topics. In Annex to CAJU-GB-2022-03-16 Amended Work Programme and Budget 2022–2023; Clean Aviation Joint Undertaking: Brussels, Belgium, 2022. [Google Scholar]
- HECATE—Hybrid Electric Regional Aircraft Distribution Technologies. Available online: https://hecate-project.eu/ (accessed on 20 December 2023).
- Wolfgang, E. Examples for failures in power electronics systems. In Proceedings of the ECPE Tutorial on Reliability of Power Electronic Systems, Nuremberg, Germany, 19–20 April 2007. [Google Scholar]
- Yang, S.; Bryant, A.; Mawby, P.; Xiang, D.; Ran, L.; Tavner, P. An industry-based survey of reliability in power electronic converters. IEEE Trans. Ind. Appl. 2011, 47, 1441–1451. [Google Scholar] [CrossRef]
- Wang, H.; Blaabjerg, F. Reliability of capacitors for DC-link applications in power electronic converters—An overview. IEEE Trans. Ind. Appl. 2014, 50, 3569–3578. [Google Scholar] [CrossRef]
- Wechsler, A.; Mecrow, B.C.; Atkinson, D.J.; Bennett, J.W.; Benarous, M. Condition monitoring of DC-link capacitors in aerospace drives. IEEE Trans. Ind. Appl. 2012, 48, 1866–1874. [Google Scholar] [CrossRef]
- Hannonen, J.; Honkanen, J.; Strom, J.-P.; Karkkainen, T.; Raisanen, S.; Silventoinen, P. Capacitor aging detection in a DC–DC converter output stage. IEEE Trans. Ind. Appl. 2016, 52, 3224–3233. [Google Scholar] [CrossRef]
- Yu, Y.; Zhou, T.; Zhu, M.; Xu, D. Fault diagnosis and life prediction of dc-link aluminum electrolytic capacitors used in three-phase ac/dc/ac converters. In Proceedings of the IEEE Second International Conference on Instrumentation, Measurement, Computer, Communication and Control, Harbin, China, 8–10 December 2012; pp. 825–830. [Google Scholar] [CrossRef]
- Gao, J.; Huang, D.; Lu, J. Online output capacitor monitor for buck dc-dc converter. In Proceedings of the IEEE Prognostics and System Health Management Conference (PHM-Chongqing), Chongqing, China, 26–28 October 2018; pp. 802–806. [Google Scholar] [CrossRef]
- Abdennadher, K.; Venet, P.; Rojat, G.; Retif, J.-M.; Rosset, C. A real-time predictive-maintenance system of aluminum electrolytic capacitors used in uninterrupted power supplies. IEEE Trans. Ind. Appl. 2010, 46, 1644–1652. [Google Scholar] [CrossRef]
- Buiatti, G.M.; Martín-Ramos, J.A.; Garcia, C.H.R.; Amaral, A.M.R.; Cardoso, A.J.M. An online and noninvasive technique for the condition monitoring of capacitors in boost converters. IEEE Trans. Instrum. Meas. 2009, 59, 2134–2143. [Google Scholar] [CrossRef]
- Laadjal, K.; Sahraoui, M.; Cardoso, A.J.M. On-line fault diagnosis of DC-link electrolytic capacitors in boost converters using the STFT technique. IEEE Trans. Power Electron. 2020, 36, 6303–6312. [Google Scholar] [CrossRef]
- Aeloiza, E.; Kim, J.H.; Enjeti, P.; Ruminot, P. A real time method to estimate electrolytic capacitor condition in PWM adjustable speed drives and uninterruptible power supplies. In Proceedings of the IEEE 36th Power Electronics Specialists Conference, Dresden, Germany, 16 June 2005; pp. 2867–2872. [Google Scholar] [CrossRef]
- Pu, X.S.; Nguyen, T.H.; Lee, D.-C.; Lee, K.-B.; Kim, J.-M. Fault diagnosis of DC-link capacitors in three-phase AC/DC PWM converters by online estimation of equivalent series resistance. IEEE Trans. Ind. Electron. 2012, 60, 4118–4127. [Google Scholar] [CrossRef]
- Andrade, J.M. Electrolytic Capacitor Degradation Monitoring Using an On-Line Parameter Estimation Scheme involving Sliding Mode Differentiators and a Kalman Filter. In Proceedings of the IEEE 21st European Conference on Power Electronics and Applications (EPE’19 ECCE Europe), Genova, Italy, 3–5 September 2019; p. P-1. [Google Scholar] [CrossRef]
- Zhang, W.; He, Y.; Wang, X.; Chen, J. A Comprehensive Method for Online Switch Fault Diagnosis and Capacitor Condition Monitoring of Three-level T-type Inverters. IEEE Trans. Power Electron. 2023, 38, 10183–10195. [Google Scholar] [CrossRef]
- Meng, T.; Zhang, P. An on-line dc-link capacitance estimation method for motor drive system based on intermittent active control strategy. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 5118–5123. [Google Scholar] [CrossRef]
- Bartlett, E.B.; Uhrig, R.E. Nuclear Power Plant Status Diagnostics Using an Artificial Neural Network. Nucl. Technol. 1992, 97, 272–281. [Google Scholar] [CrossRef]
- Witczak, M. Advances in Model-Based Fault Diagnosis with Evolutionary Algorithms and Neural Networks. Int. Appl. Math. Comput. Sci. 2006, 16, 85–99. [Google Scholar]
- Kobayashi, T.; Simon, D.L. Hybrid Neural-Network Genetic-Algorithm Technique for Aircraft Engine Performance Diagnostics. J. Propuls. Power 2005, 21, 751–758. [Google Scholar] [CrossRef]
- Kowalski, C.T. Diagnostyka Układów Napędowych z Silnikiem Indukcyjnym z Zastosowaniem Metod Sztucznej Inteligencji; Oficyna Wydawnicza Politechniki Wrocławskiej: Wrocław, Poland, 2013. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Fernandes, F.E.; Yen, G.G. Automatic Searching and Pruning of Deep Neural Networks for Medical Imaging Diagnostic. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 5664–5674. [Google Scholar] [CrossRef]
- Yang, H.; Wang, P.; An, Y.; Shi, C.; Sun, X.; Zhang, X.; Wie, T.; Ma, Y. Remaining useful life prediction based on denoising technique and deep neural network for lithium-ion capacitors. eTransportation 2020, 5, 100078. [Google Scholar] [CrossRef]
- Kozma, R.; Ilin, R.; Siegelman, H.T. Evolution of Abstraction Across Layers in Deep Learning Neural Networks. Procedia Comput. Sci. 2018, 144, 203–213. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-Time Motor Fault Detection by 1-D Convolutional Neural Networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Chattopadhay, P.; Saha, N.; Delpha, C.; Sil, J. Deep Learning in Fault Diagnosis of Induction Motor Drives. In Proceedings of the Prognostics and System Health Management Conference, Chongqing, China, 26–28 October 2018. [Google Scholar] [CrossRef]
- Afrasiabi, S.; Afrasiabi, M. Real-Time Bearing Fault Diagnosis of Induction Motors with Accelerated Deep Learning Approach. In Proceedings of the 10th International Power Electronics, Drive Systems and Technologies Conference (PEDSTC), Shiraz University, Shiraz, Iran, 12–14 February 2019. [Google Scholar] [CrossRef]
- Skowron, M. Development of a universal diagnostic system for stator winding faults of induction motor and PMSM based on TL. In Proceedings of the IEEE 14th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Chania, Greece, 28–31 August 2023. [Google Scholar] [CrossRef]
- Skowron, M.; Kowalski, C.T. Permanent Magnet Synchronous Motor Fault Detection System Based on TL Method. In Proceedings of the 48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022. [Google Scholar] [CrossRef]
- Shao, S.; McAleer, S.; Yan, R.; Baldi, P. Highly accurate machine fault diagnosis using deep transfer learning. IEEE Trans. Ind. Inform. 2018, 15, 2446–2455. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Li, X.; Gao, L. A new transfer learning based on VGG-19 network for fault diagnosis. In Proceedings of the IEEE 23rd International Conference on Computer Supported Cooperative Work in Design (CSCWD), Porto, Portugal, 6–8 May 2019. [Google Scholar] [CrossRef]
- Jigyasu, R.; Shrivastava, V.; Singh, S.; Bhadoria, V. Transfer learning based bearing and rotor fault diagnosis of induction motor. In Proceedings of the 2nd International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, 28–29 April 2022. [Google Scholar] [CrossRef]
- MATLAB/Simulink Simscape Electrical Documentation. Available online: https://www.mathworks.com/help/sps/ (accessed on 18 April 2024).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parmeter | Signal | ||
|---|---|---|---|
| I2 [A] | UB [V] | ||
| RMS | Measurements | 3.8022 | 116.0127 |
| Simulations | 3.7854 | 115.2754 | |
| Error [%] | 0.4424 | 0.6356 | |
| Max | Measurements | 3.9665 | 121.0847 |
| Simulations | 3.9658 | 120.9746 | |
| Error [%] | 0.2435 | 0.0909 | |
| Min | Measurements | 3.6467 | 111.2482 |
| Simulations | 3.6162 | 109.5845 | |
| Error [%] | 0.8341 | 1.4955 | |
| Ripple | Measurements | 0.3198 | 9.8365 |
| Simulations | 0.3406 | 11.3901 | |
| Error [%] | 6.4898 | 15.7944 | |
| Convolutional Neural Network Structure | Number of Learnable | ||
|---|---|---|---|
| Classic Training | Transfer Learning | ||
| Feature detector | Convolutional layer: 30 filters, 3 × 3 | 380 | 0 |
| Normalisation Layer | 40 | 0 | |
| Pooling Layer: max, 3 × 3, stride 2 × 2 | 0 | 0 | |
| Convolutional layer: 40 filters, 3 × 3 | 7240 | 0 | |
| Normalisation Layer | 80 | 0 | |
| Pooling Layer: max, 3 × 3, stride 2 × 2 | 0 | 0 | |
| Convolutional layer: 60 filters, 3 × 3 | 21,660 | 0 | |
| Normalisation Layer | 120 | 0 | |
| Pooling Layer: max, 3 × 3, stride 2 × 2 | 0 | 0 | |
| Classifier | Fully Connected Layer: 60 neurones | 14,460 | 14,460 |
| Fully Connected Layer: 8 neurones | 488 | 488 | |
| Total | 44,468 | 14,948 | |
| Class | Percentage of Nominal Capacitance (λ) |
|---|---|
| 1 | 100.00% |
| 2 | 90.40% |
| 3 | 84.87% |
| 4 | 67.40% |
| 5 | 56.32% |
| 6 | 33.72% |
| 7 | 22.35% |
| 8 | 16.80% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skowron, M.; Oliszewski, S.; Dybkowski, M.; Jarosz, J.J.; Pawlak, M.; Weisse, S.; Valire, J.; Wyłomańska, A.; Zimroz, R.; Szabat, K. Applications of the TL-Based Fault Diagnostic System for the Capacitor in Hybrid Aircraft. Electronics 2024, 13, 1638. https://doi.org/10.3390/electronics13091638
Skowron M, Oliszewski S, Dybkowski M, Jarosz JJ, Pawlak M, Weisse S, Valire J, Wyłomańska A, Zimroz R, Szabat K. Applications of the TL-Based Fault Diagnostic System for the Capacitor in Hybrid Aircraft. Electronics. 2024; 13(9):1638. https://doi.org/10.3390/electronics13091638
Chicago/Turabian StyleSkowron, Maciej, Stanisław Oliszewski, Mateusz Dybkowski, Jeremi Jan Jarosz, Marcin Pawlak, Sebastien Weisse, Jerome Valire, Agnieszka Wyłomańska, Radosław Zimroz, and Krzysztof Szabat. 2024. "Applications of the TL-Based Fault Diagnostic System for the Capacitor in Hybrid Aircraft" Electronics 13, no. 9: 1638. https://doi.org/10.3390/electronics13091638