1. Introduction
Distributed generation (DG) plants are now common in the electricity network, and are mainly related to the increasing exploitation of renewable energy sources (RES). DGs play an important role in pollution reduction, power loss reduction and power quality improvements, which are more important in large scale networks. On the other hand, using DG units can be challenging in some issues such as: reverse power flow, voltage deviation and voltage fluctuation. When many DG units supply a certain load separately adjacent to each other, in fact they form a microgrid (MG) that can solve many challenges in the power network [
1].
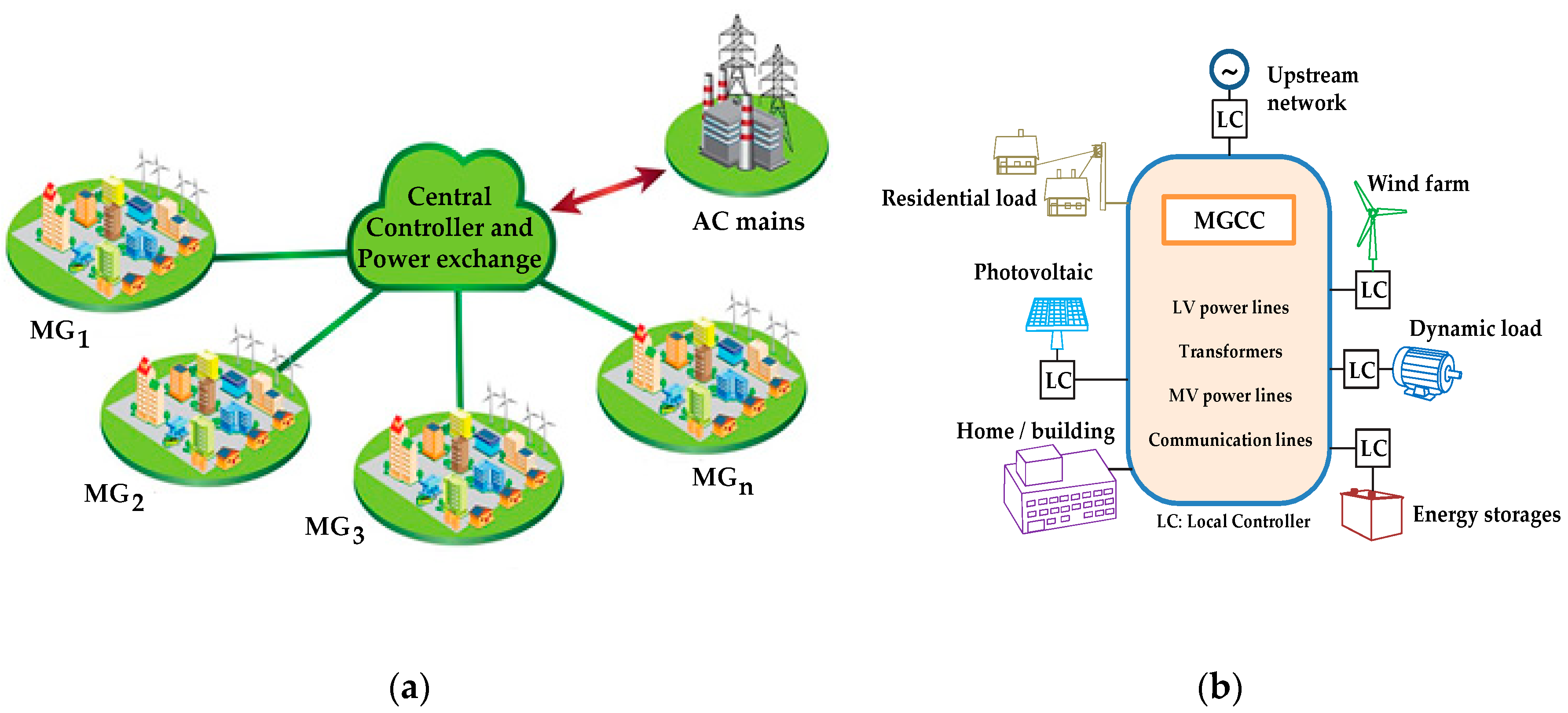
Figure 1 shows a typical MG architecture adjacent to an AC system, local controllers (LCs) and MG central controller (MGCC). Photovoltaic and energy storage systems (ESS) connect to the AC system by a DC–DC–AC converter. Additionally, wind turbines connect to AC bus bars by an AC–DC–AC converter. In islanding operation mode, in addition to controlling voltage and frequency, RESs are responsible for supplying local loads. The AC bus bar, which is connected to the upstream network in the connected to network mode, is very important and is known as the point of common coupling (PCC) bus. This bus controls power flow and load distribution between MG and the upstream network [
2].
MG stability is a critical issue, requiring an appropriate control scheme to face real time power requirements in the presence of constant load changes of varying natures. In this sense, the DG’s capability to provide active and reactive powers is mandatory to limit MG voltage and frequency deviation. Droop controller is one of the well-known controllers in this field which has been used in recent years [
3]. Additionally, a novel control method, named virtual synchronous generator (VSG) which functions in accordance with fluctuation equations, is proposed to control network steady state and transient state [
4]. Due to the fact that the inertia of DG units has a great impact on the droop controller, VSG output active and reactive powers dynamically distributes among DG units in a way that its virtual inertia and other DGs are retained. Thus, the implementing of an improved droop method for power distribution is still one of the popular algorithms in MG islanding operation among researchers. However, this method faces serious challenges in reactive power distribution. An improved droop method is proposed in [
5] to improve dynamic stability in active and reactive power distribution. Additionally, an adaptive distributed droop method is presented in [
6] to match the dynamic performance of power system characteristics with the network state, considering its static state. Furthermore, to distribute power under complex loading conditions, a strategy based on a regulation algorithm is proposed in [
7]. Additionally, to control inverters, the power management is proposed hierarchically in [
8]. Although power distribution is performed and MG dynamic response is studied, its economic evaluation has not been executed yet. In [
9], the voltage stability in case of a big disturbance has been studied, and a droop-based Q-f and P-V control method that can operate under uncertain feeder impedance condition has been proposed. An important economic problem observed in hierarchical controllers is that active power measurement criterion should be based on generator costs, and not a linear or proportional relationship based on generator size.
A cost-based non-linear algorithm is offered in [
10] and a control plan based on droop and prioritized cost is evaluated in [
11]. However, the ability of instantaneous reactive power distribution optimization is visible in neither of the mentioned references. When all DGs operate in the same frequency and steady state, active power can be regulated according to the droop control method. However, under non-linear load and unequal feeder impedance, reactive power is still deprived of proper distribution and power harmonics emerge in it [
12]. Under this condition and even a more critical condition, poorly active power distribution could result in reactive power flow among DGs. This will lead into instability of the network [
13]. So far, to distribute reactive power, many droop-based methods have been presented that are based on three main categories: the improved primary droop control method [
14], improved virtual impedance method [
15] and improved hierarchical control methods [
16].
There are many studies that have concentrated on the power sharing issue, however, some of the limitations and restrictions are still remained. For example, in the active power sharing method using droop control and its derivatives some drawbacks are observed such as: (1) it is not appropriate for total costs minimizations, (2) it is not suitable for multiple DGs utilization, (3) it is not suitable for complex feeder impedance, and (4) the proportional active power sharing could not be achieved [
17]. When networked-based approaches or the decoupling method between the P-V and Q-f curves are chosen to obtain the active power sharing, several disadvantages are come into watch such as: (1) it is not suitable for complex MG, (2) the total cost of generation could not be considered, and (3) the proportional active power sharing is not achieved [
18,
19]. Considering the nonlinear cost-based droop method, it also has two shortcomings as: (1) it is not suitable for complex feeder impedance, and (2) it is not applicable for complicated MG structures [
20].
The difficulties of reactive power sharing using optimized secondary control could be expressed as: (1) the proportional reactive power sharing is difficult to achieve, (2) the communication delays still exist in the low-bandwidth communication (LBC), and (3) the control equations need to be further optimized in the MG with complex loads [
21]. The programing algorithms for reactive power sharing are useful, but some complications are still observed, such as the complexity of implementation, data drop problems and time delay considerations [
22]. The multi-agent method has recently been introduced in MG control and operation. Using this approach for reactive power sharing has many advantages, however, there might be some weaknesses such as: (1) designing an applicable protocol in agents is difficult, (2) the active and reactive power sharing are poor when data drop exists in the preset algorithm, and (3) the communication delay is in LBC lines may cause some interferences [
23].
The abovementioned highlights the main research gaps of the accurate power sharing issue.
Table 1 and
Table 2 represent a comparison between advantages and disadvantages of power distribution control methods for active and reactive sharing, respectively.
In [
24] the impact of distributed generation in the distribution networks is considering voltage profile improvement and energy losses minimization is investigated, but the optimal power sharing is not achieved. In [
25] the islanding effect on distribution networks and end user loads in presented. Since the load sharing in islanding is analyzed, but there are no effects of feeder impedance. The authors in [
26] proposed a method for grid monitoring considering energy storage system control, however, the reactive power sharing accuracy is not sufficient in details. For a fuzzy logic hysteresis control of a single phase inverter, the authors in [
27] represent an approach to show the effectiveness of control scheme, and finally, in [
28], there is a comprehensive review for grid control methods, which are performed in parallel.
This paper is organized as follows:
Section 2 presents the fundamentals of DG control in micro grid type networks.
Section 3 describes microgrid basic mathematical modeling. A modified sliding mode control (MSMC) based on nonlinearity uncertainties is proposed in
Section 4.
Section 5 investigate the simulations results and
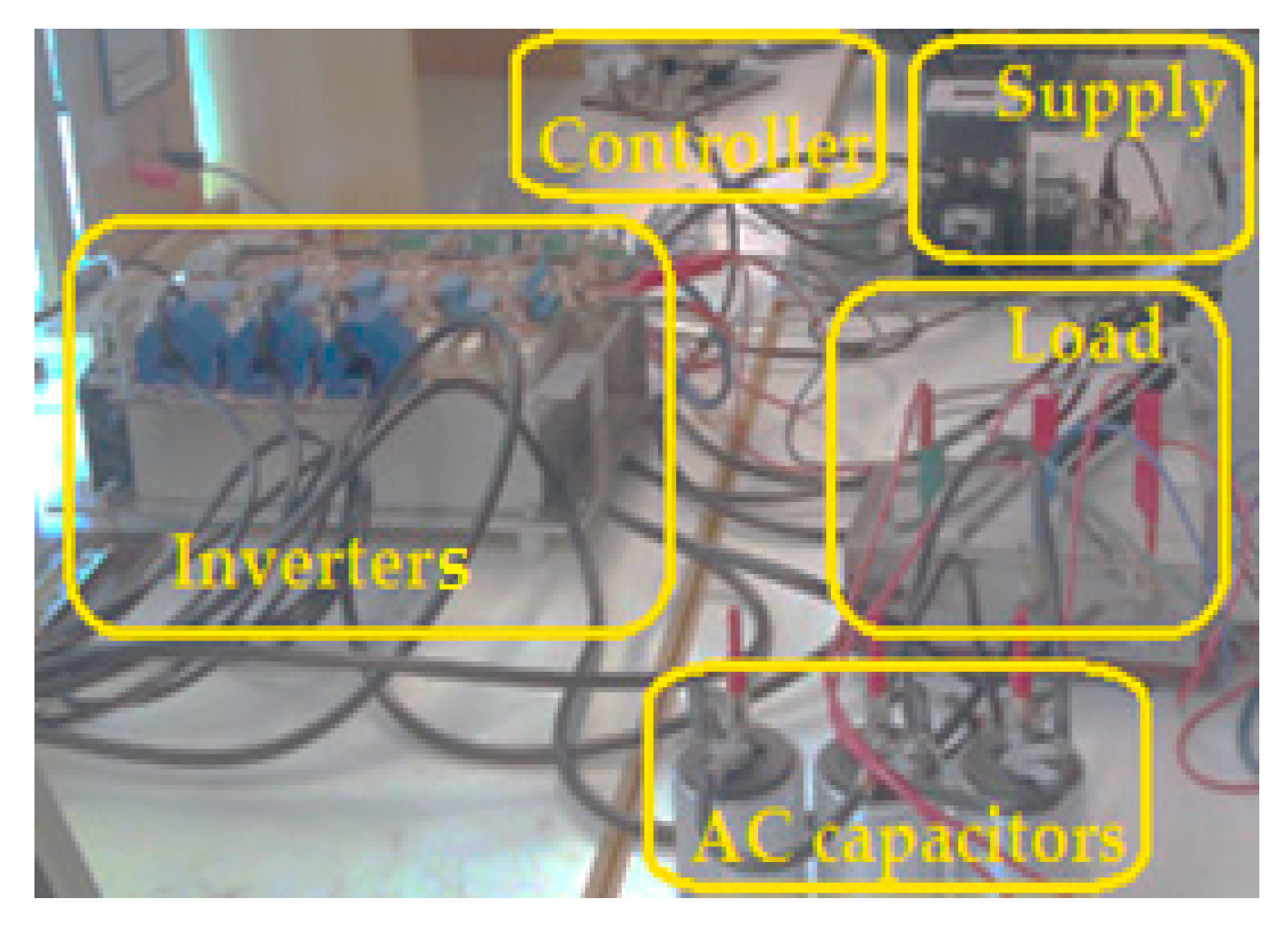
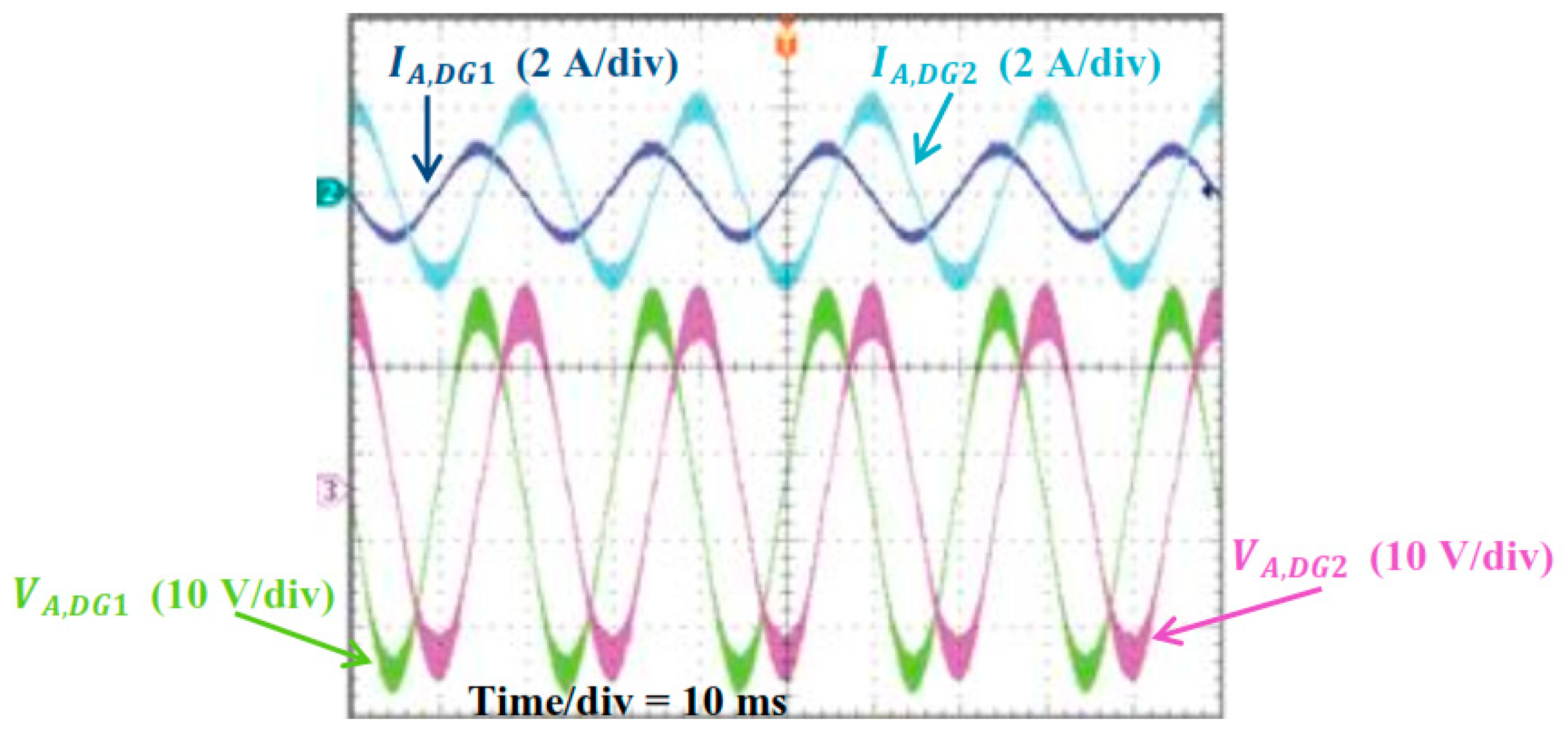
Section 6 discuss the experimental output. Finally, the conclusion is presented in
Section 7.
The main contributions in this paper are:
A modified enhanced SMC method to get better convergence in sliding surface. This method is easy to implement for laboratory tests rather than the multi-agent systems, programming algorithms and network-based approaches.
The Lyapunov function combined with the optimal Riccati ensure the proposed MSMC scheme is stable. This results in being sure for guaranteeing the stability of control approach in applicable prototype implementation, because some of abovementioned methods do not have capability to check the system stability. In addition, the constant coefficients used to design the Lyapunov function are few.
Equal reactive and active power sharing are achievable with multiple DGs units with minimum deviation, since several methods named in
Table 1 and
Table 2 are not compatible with complex MG and multiple DGs.
2. DG Control Fundamentals
The control scheme for two islanded MGs is represented in
Figure 2 to show the blocks placements and control loops. In general, there are three control layers that exist to guarantee the MG stability and safe operation:
The upper layer (loop 1) controls the voltage and frequency with satisfying precise power balance between loads and the DGs;
The second layer (loop 2) mitigates the voltage and frequency attenuations, results in reference current vector to make the pulse width modulation (PWM) pulses;
The third layer usually controls the power exchange with the upstream network in safe operation mode considering the economic power market law.
Figure 3 shows the classic control scheme for the two parallel-DGs in an islanded MG. The MG frequency
fMG and measured voltage
VMG are compared to the reference signals, respectively to be regulated and attenuation limitation through a proportional-integral-derivative (PID) or proportional-resonance (PR) controller. The regulated signals are transferred to the primary and inner control loop considering a communication lines. The reactive power sharing will be ineffective if the conventional secondary control is applied. These parallel DGs are connected to a common distribution bus with different feeder reactances X
1 ≠ X
2, as shown in
Figure 3, results in unsuccessful voltage maintain [
29].
The characteristics of conventional secondary control scheme is shown in
Figure 3b. The red and green dashed line is the secondary control curve for DG
1 and DG
2, respectively, while the blue solid line is the conventional droop control curve. In
Figure 3b.1, the points A(Q1,E1) and C(Q2,E2) represent the output voltage of DG
1. The injected reactive power Q1 and Q2 result in E1 for DG1 and E2 for DG2, respectively. The points B(Q1′,E*) and D(Q2′,E*) signify the output reactive power of DG1 and DG2 when the voltage is kept constant at the nominal value E* in the conventional secondary control. Conversely, the reactive power deviation between DG1 and DG2 increases as this non-equality Q1′ < Q1 < Q2 < Q2′. Nevertheless, as revealed in
Figure 3b.2, once the reactive power is controlled as Q1 = Q2 = Q” in the conventional secondary control, the points B’(Q”,E1”) and D’ (Q”,E2”) will show the output voltages of DG1 and DG2, respectively. However, the voltages of DGs cannot be renovated at the nominal values, so that and the voltage difference is larger than the amount compared to the primary control (E2 < E2“ < E1 < E1“). Therefore, the conventional method may not adjust the output voltages of DGs precisely at equality condition of reactive power [
29,
30].
3. State Space Power Grid Equations
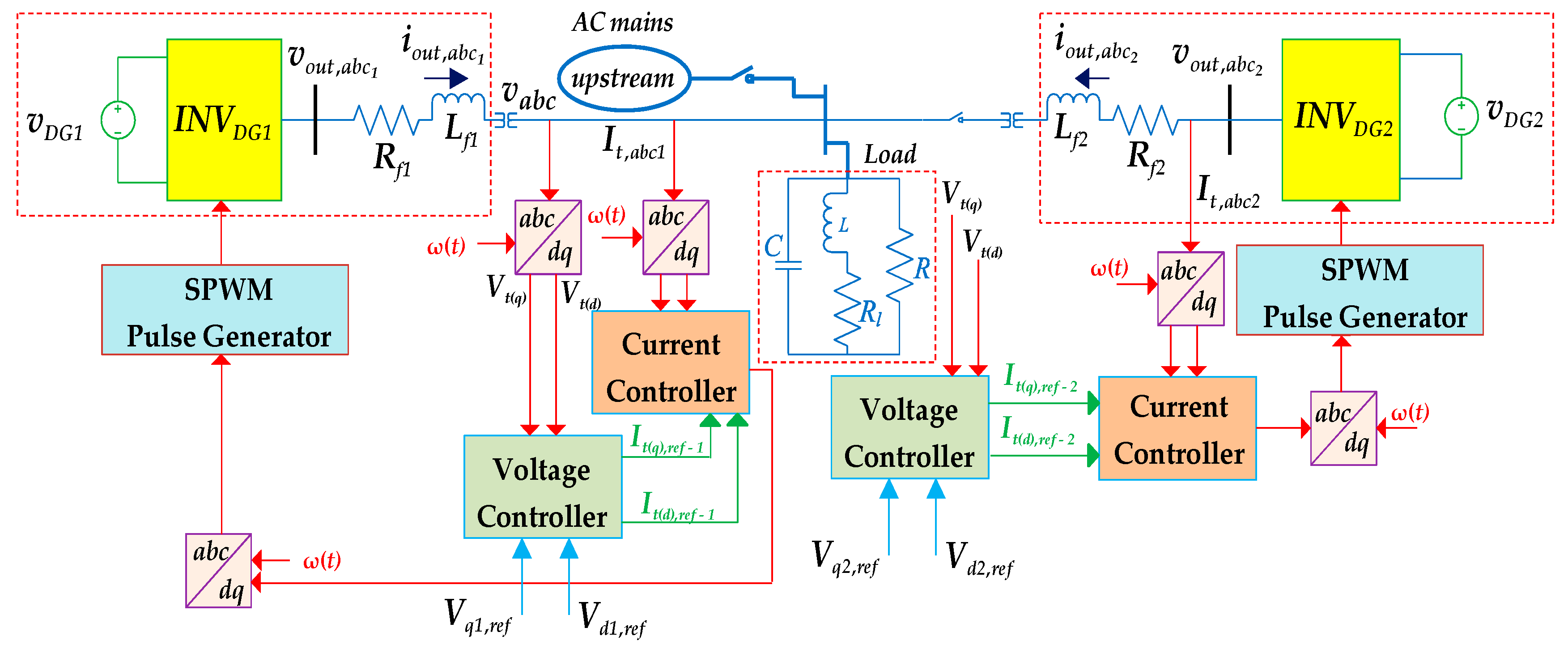
A control structure for power sharing relying on two parallel DG units is illustrated in
Figure 4.
For the purpose of studies, the renewable source-based DG plant representation is simplified, as shown below.
The basic equations for the MG system physical description are:
where
DG unit output three-phase current,
is the voltage at the point of common coupling,
is the inductive load current and
is the three-phase voltage at inverter output. By applying Clark and Park transformations all variables of each phase mentioned above are translated to a
dq rotating frame as follows:
where
and
are uncertainties related to the inverter. If the state space
and input variable
are included in state space equations, therefore, we have:
where
and
are nonlinear functions of state vector and
is an indefinite function representing the uncertainties and dynamic attenuations. Assuming that
, then it can be found that:
Assume that
where
and
are positive constants. If
then the system formulated in (3) will change to:
That the objective function (
) can minimize the system costs.
where
and
are nonlinear functions of state vector
, which are semi-definite positive and definite positive, respectively. To compensate the uncertainties, the control law is chosen as:
where
and
are the models of optimized nominal system and uncertainties considering parameter variations and distributions. For the linear systems such as power grid equations around set point, the state-space equations are written as:
The feedback controller using the state-dependent Riccati equation is chosen as follows [
31]:
where
represents a symmetrical definite positive matrix, which is unique at each set point obtained by solving as:
4. Modified Sliding Mode Control
Considering
is a sliding surface which is a function of
G(X) and
T(t), then the formulation principles are expressed as:
where
represents an un-unique matrix, which has to satisfy the non-singularity of
. According to (10), it is obvious that the initial state
is equal to zero. Consequently, the system is initiated from zero initial condition. Applying first derivative led to:
To satisfy
, the control input is obtained as (13).
In order to guarantee the system stability, choosing a Lyapunov function has to meet the negative first derivate criterion. Then, it follows that:
where
is a positive constant. To apply the system limitation and to avoid chattering phenomenon, the saturation functions (
) is used instead of
function. System stability evaluation is obtained:
Using some simplifications lead to:
Applying further simplification, results in:
where
is the first order norm of sliding surface. If
, it is guaranteed that the first derivate of the Lyapunov function is negative (
.
5. Simulation Results
The verification of the proposed technique comprises two simulation scenarios being carried out in MATLAB. The conventional droop controller is compared to the new MSMC strategy regarding active power and reactive power sharing response as well as the system frequency stability. For the sake of clarity, the MG is simulated with four DG power plants having each one a rated apparent power of 8 kVA as shown in
Table 3.
Figure 5 shows the simulations results using the conventional controller. Initially, the four DG units are delivering a combined active power of 10.8 kW in equal parts though for reactive support a significant imbalance can be seen in
Figure 5b. That is to say, the conventional approach cannot handle well the sharing of the reactive power among the four DG units. As it reaches the time instant
t = 1.2 s the load active power needs increase by 70%. As observed the active power output is still equally provided and noted that reactive power sharing reacts in the same proportional way. Restoration of voltage and frequency to previous values before the increment of load impedance followed by a decrease of 60 in relation to the original steady state is not possible as clearly seen in
Figure 5c,d. In the following scenario the proposed controller is subject to similar working conditions. The controller under study is configured accordingly to the parameters shown in
Table 4.
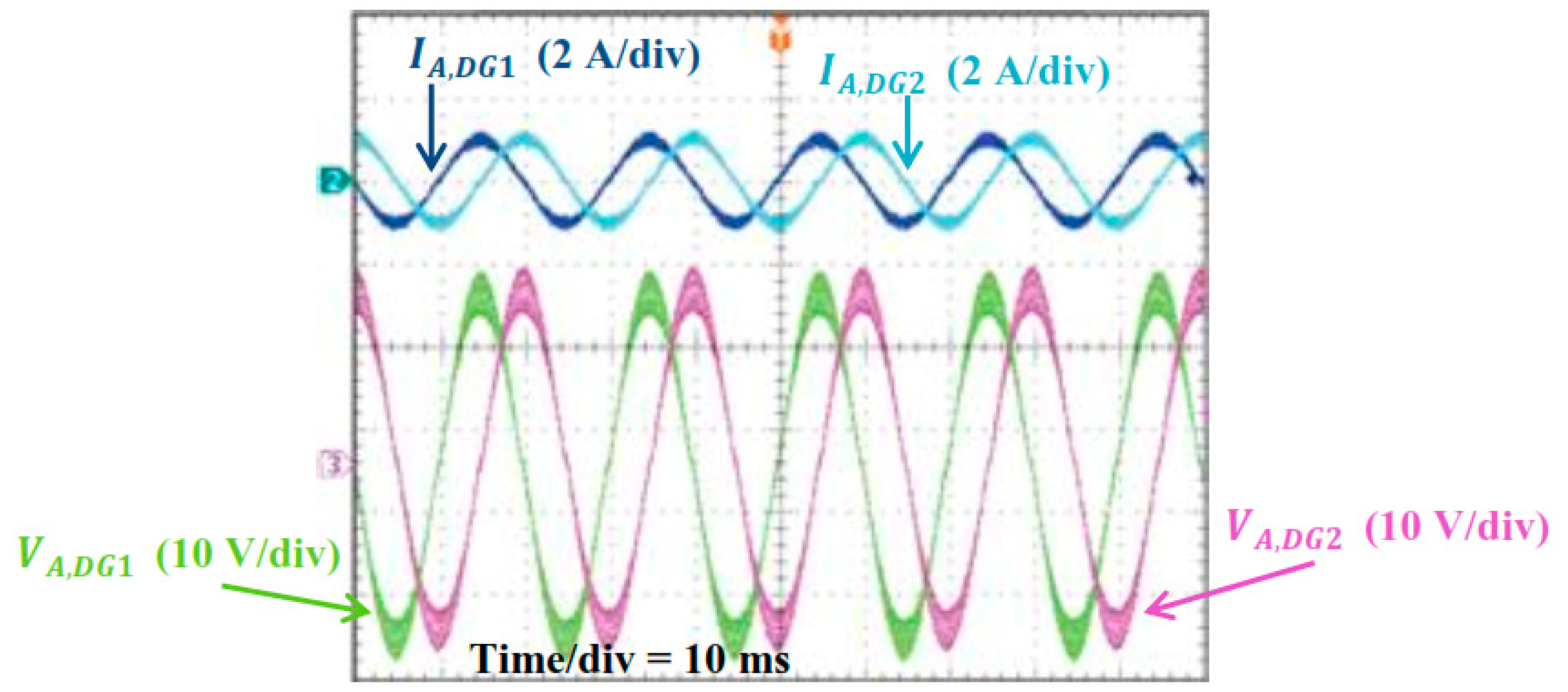
Figure 6a,b reveal that in steady state operation, both electrical quantities are generated by showing the proportionality criterion is effectively applied. As for power reactive sharing capability, the non-conventional controller is able to distribute equally the reactive energy output, ensuring DGs output voltage are equal. At
the DG plant number 4 is shut down and remains disconnected until the end of the simulation. With loss of one DG unit the remaining DG plants update their response providing almost balanced active power. There is a small mismatch from the DG3 compared to the other two DGs, which are performing equally in terms of power delivery as observed in
Figure 6a.
At loss of one DG unit the system frequency deviation is almost no noticeable since the difference is residual in
Figure 6c. On the other hand, reactive power sharing requirement in
Figure 6b seems to be satisfied in the presence of the DG loss event.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}