
A Sparse Voxel Octree-Based Framework for Computing Solar Radiation Using 3D City Models


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. Methods
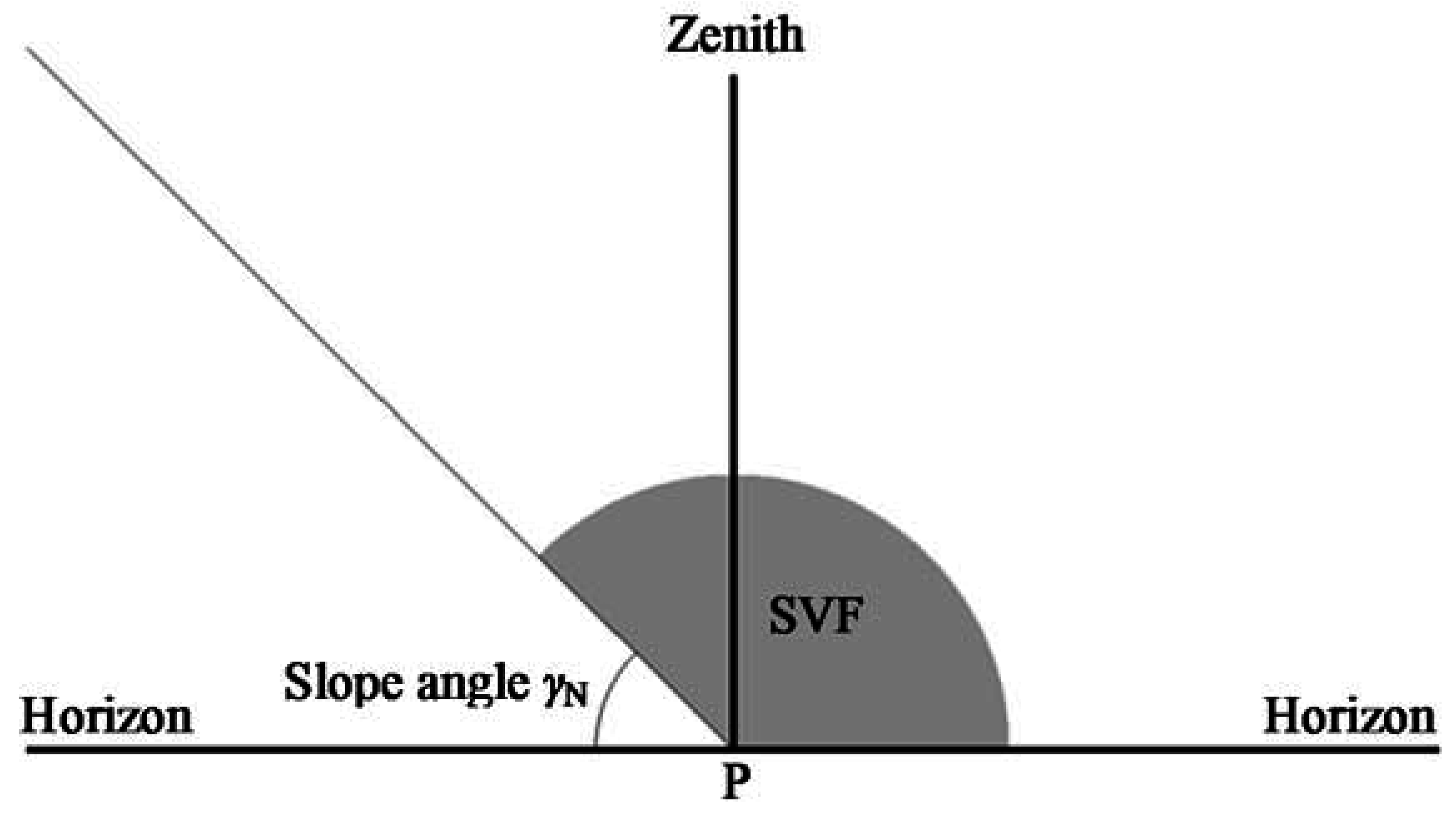
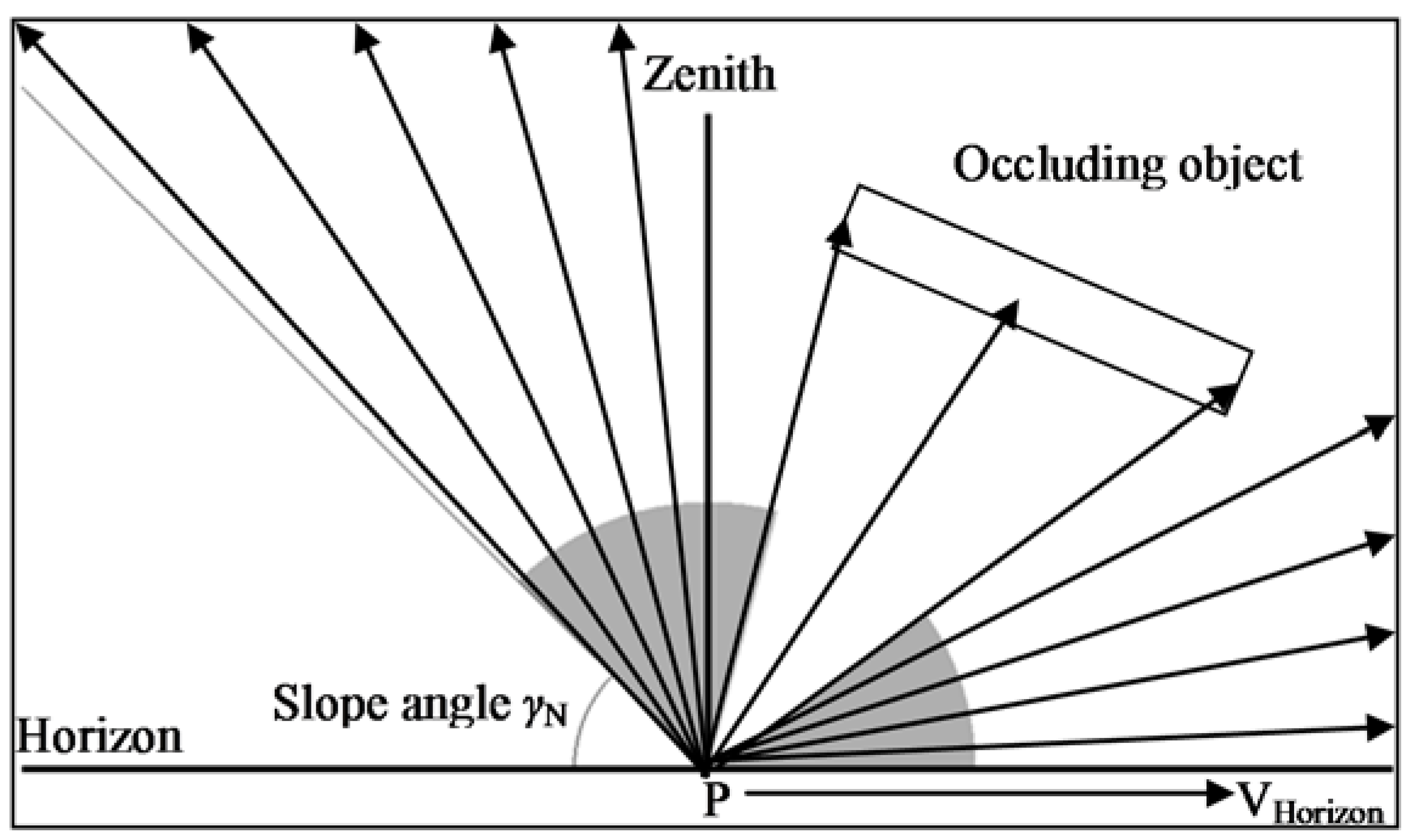
3.1. The r.sun Solar Radiation Model and Its Extension
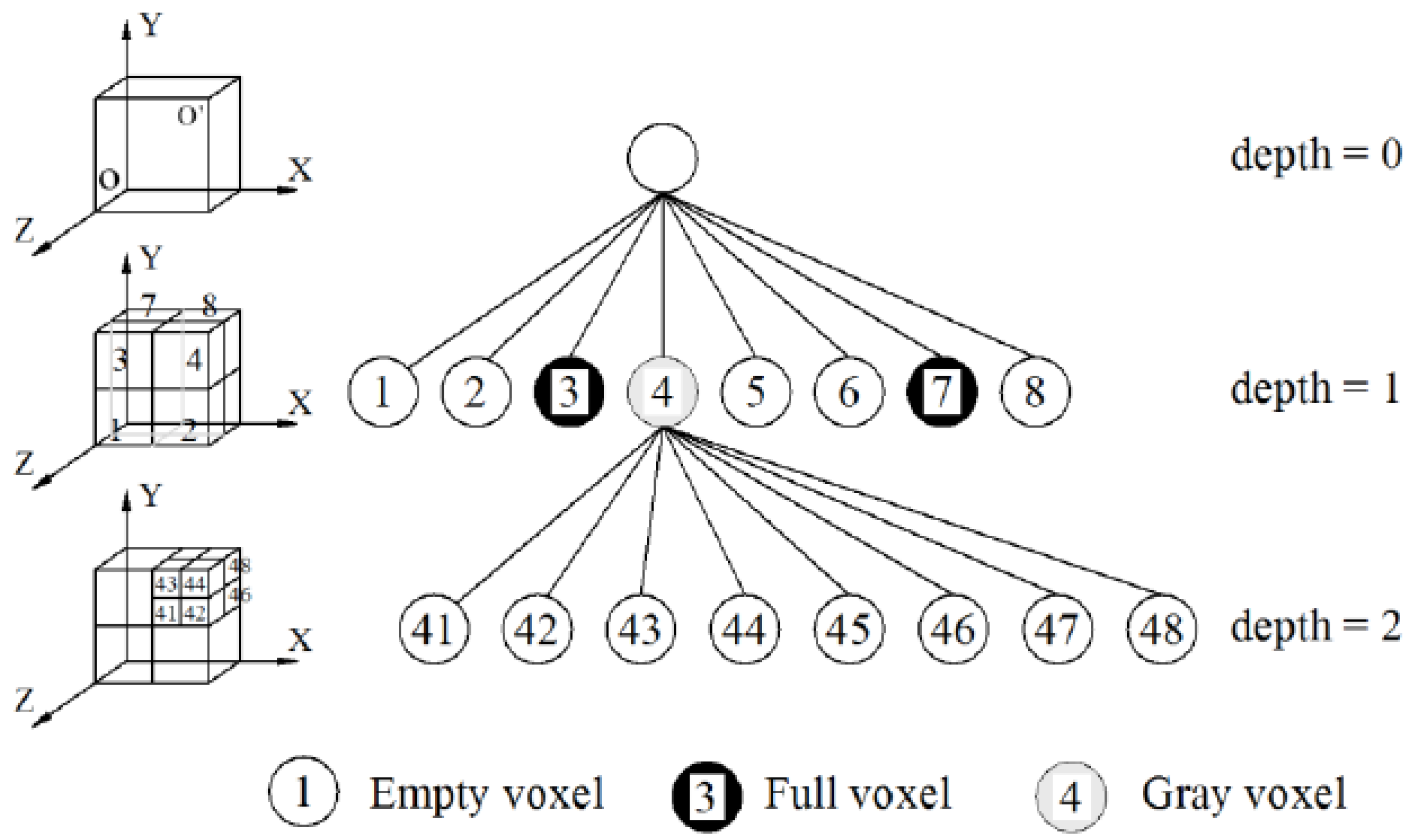
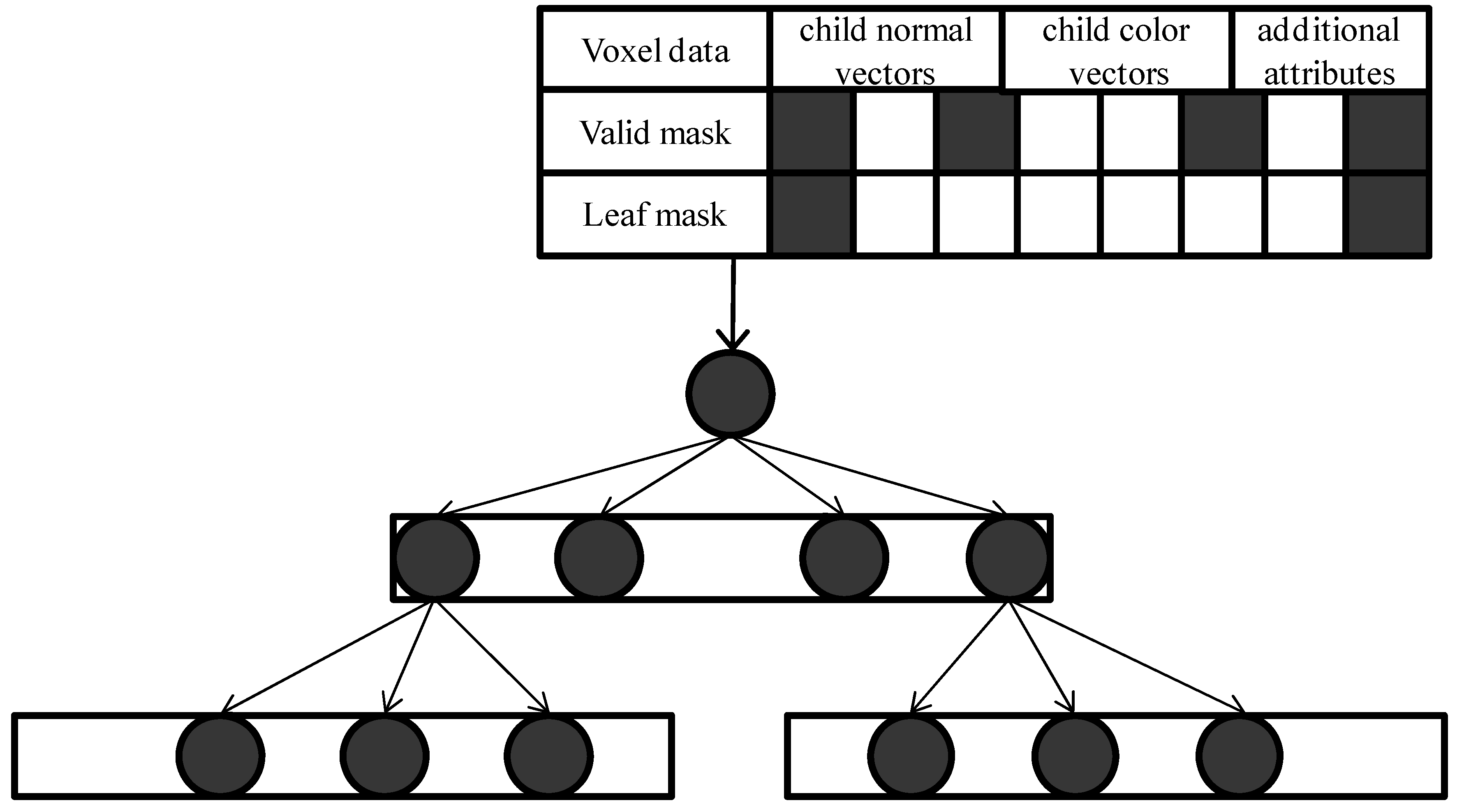
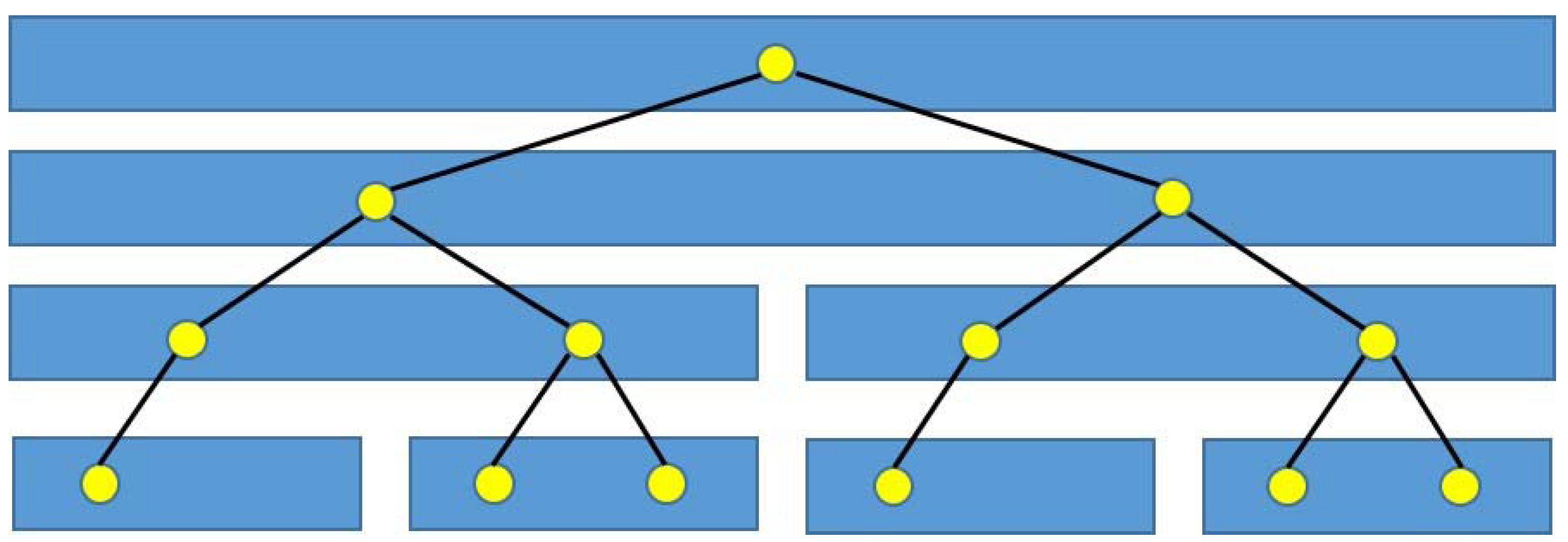
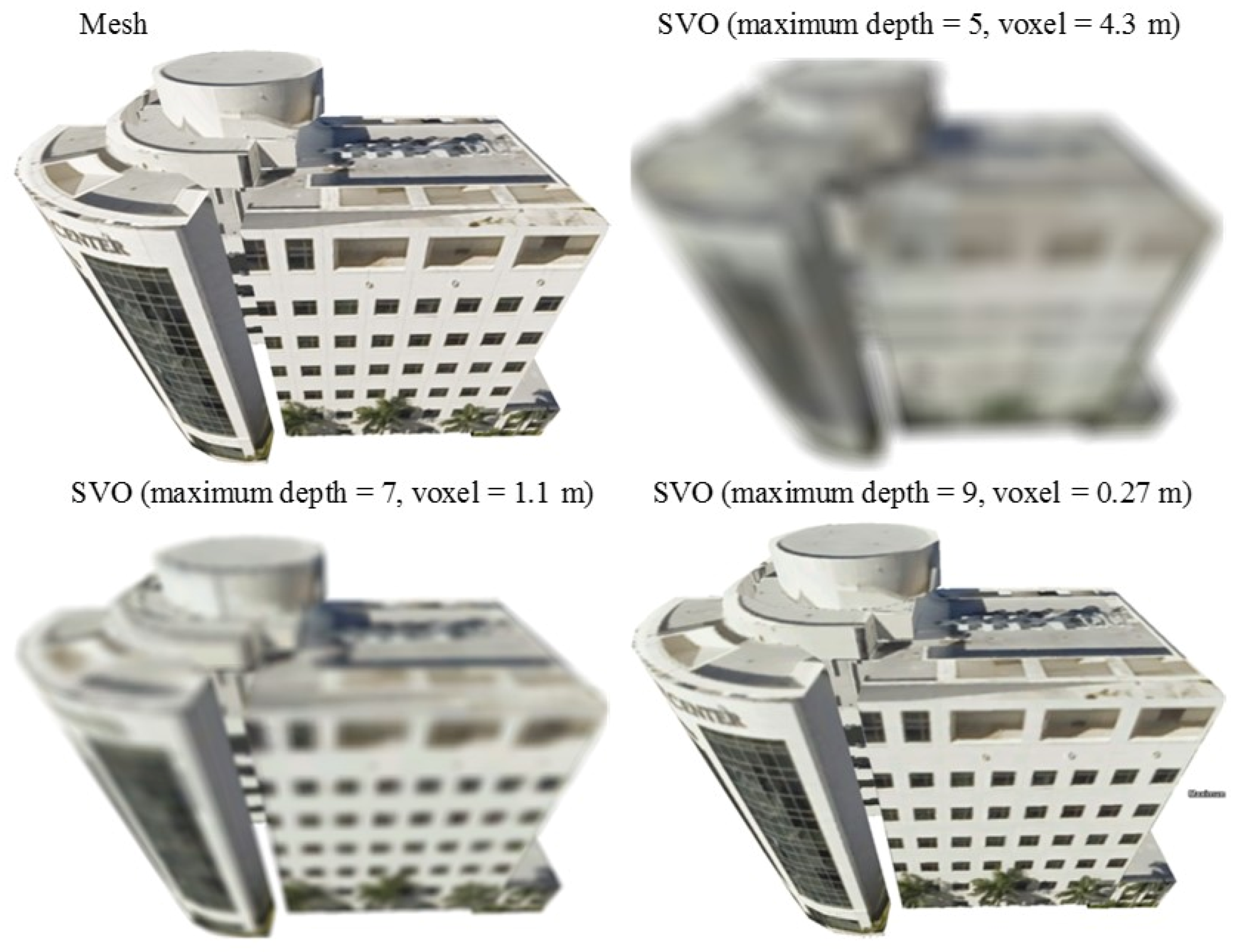
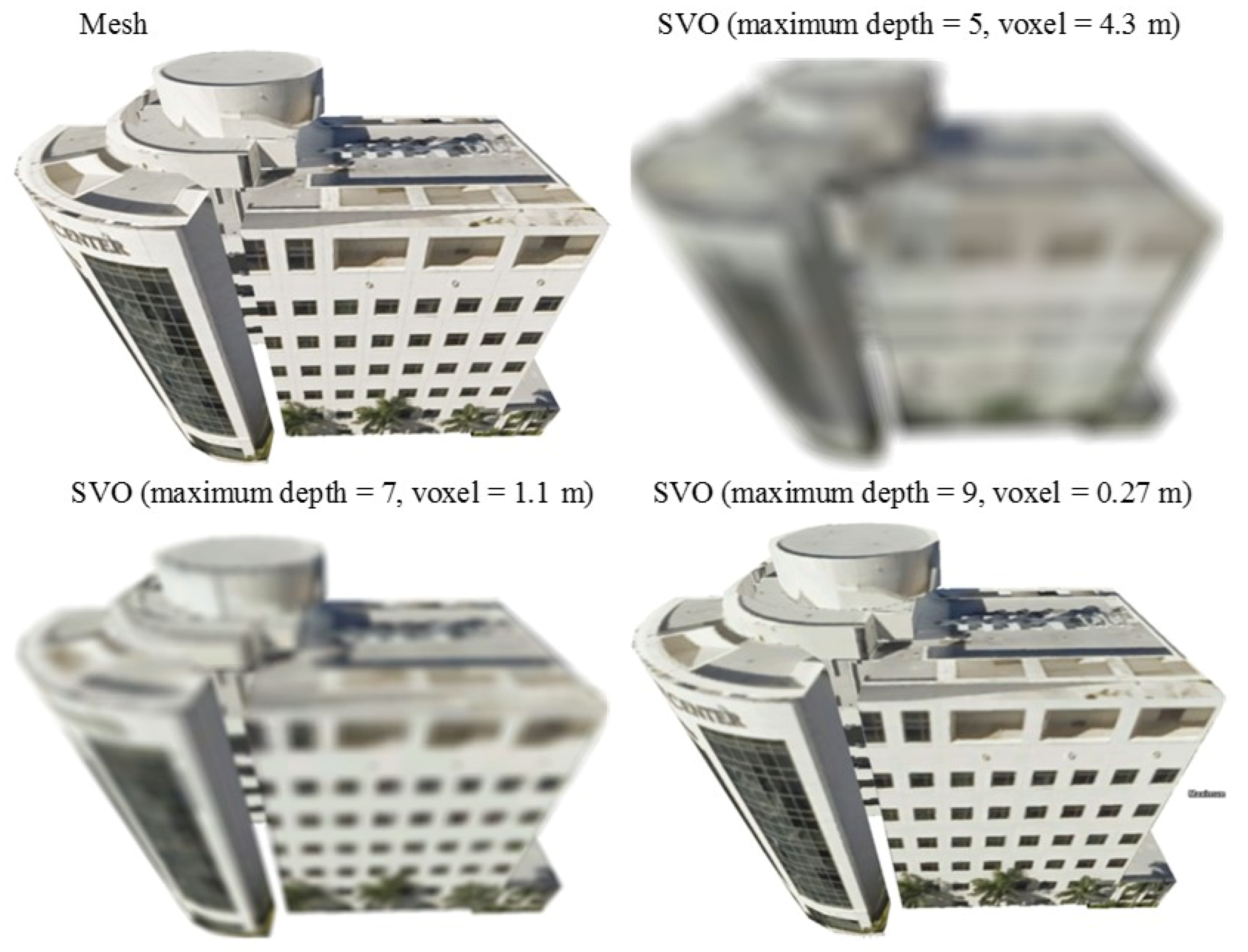
3.2. SVO Data Representation
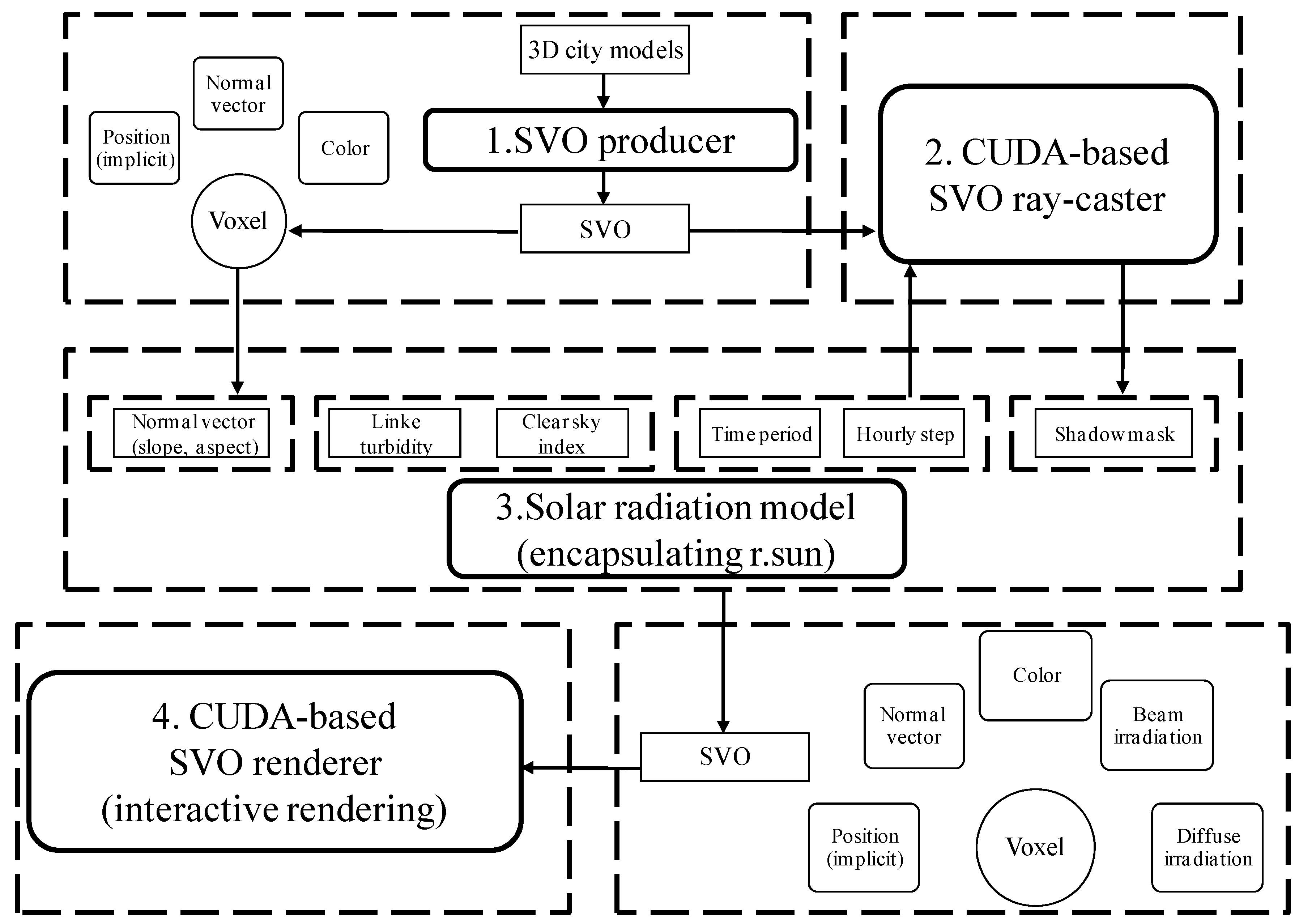
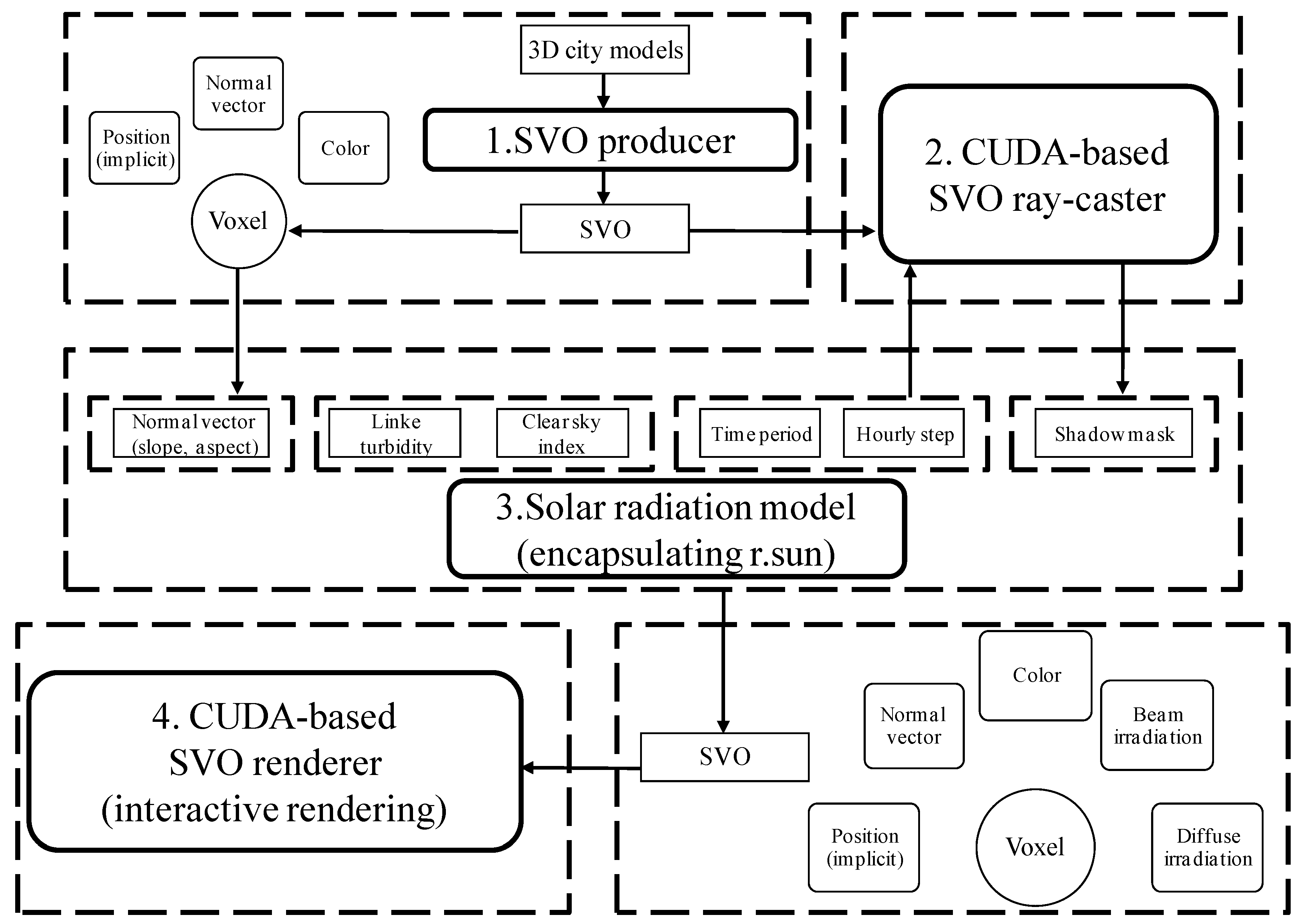
3.3. Implementation
4. Analyses and Discussion
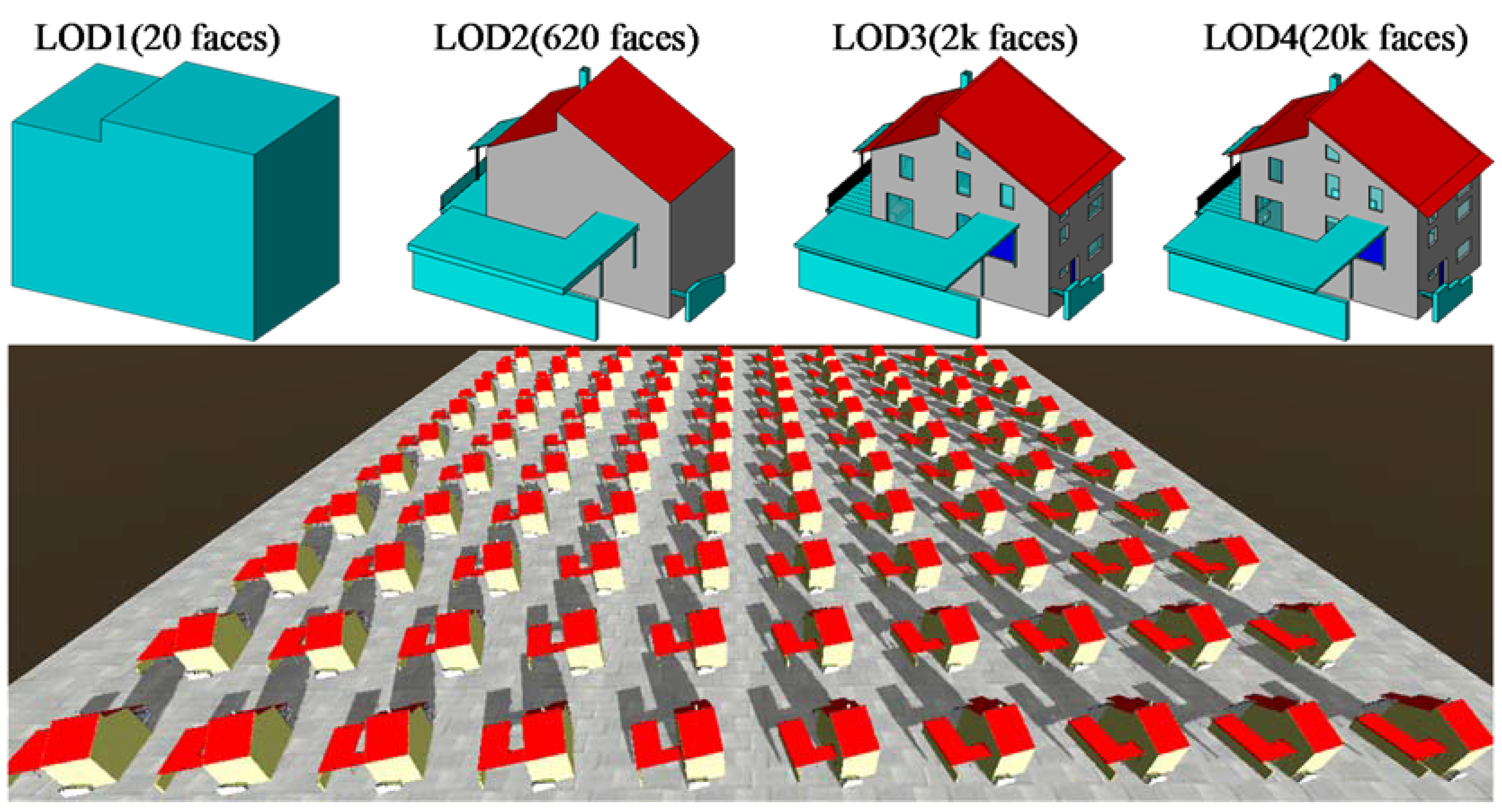
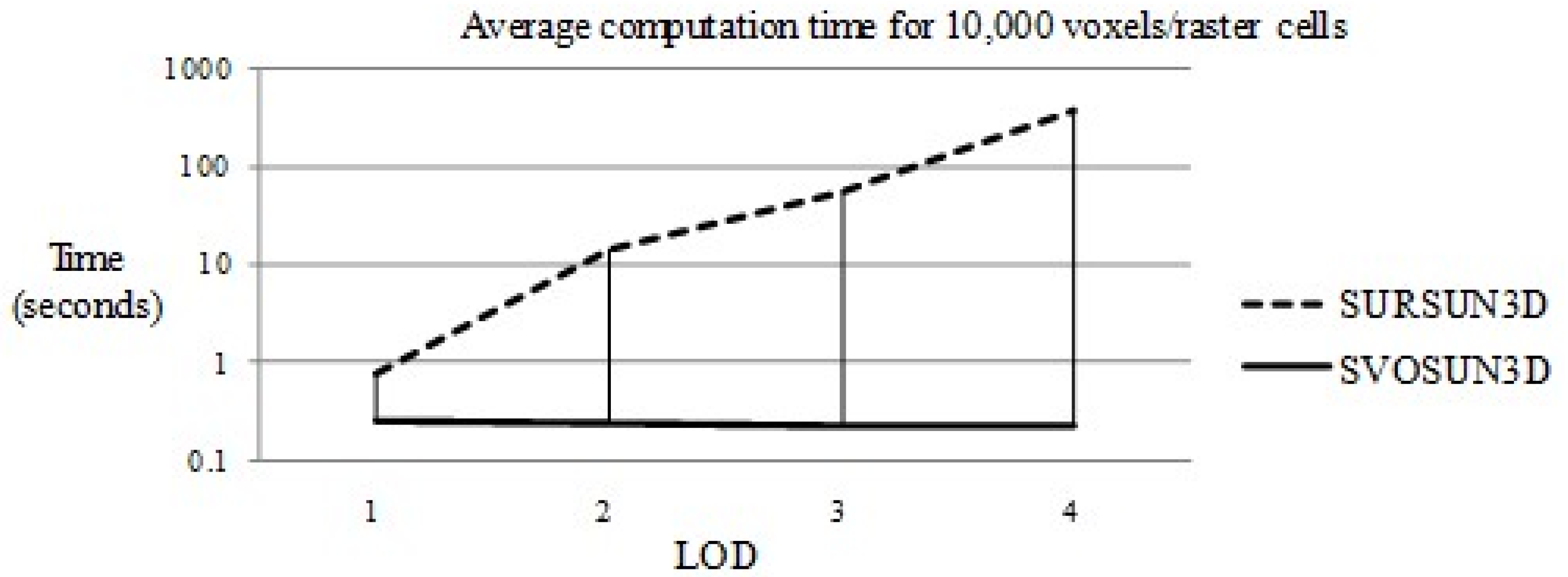
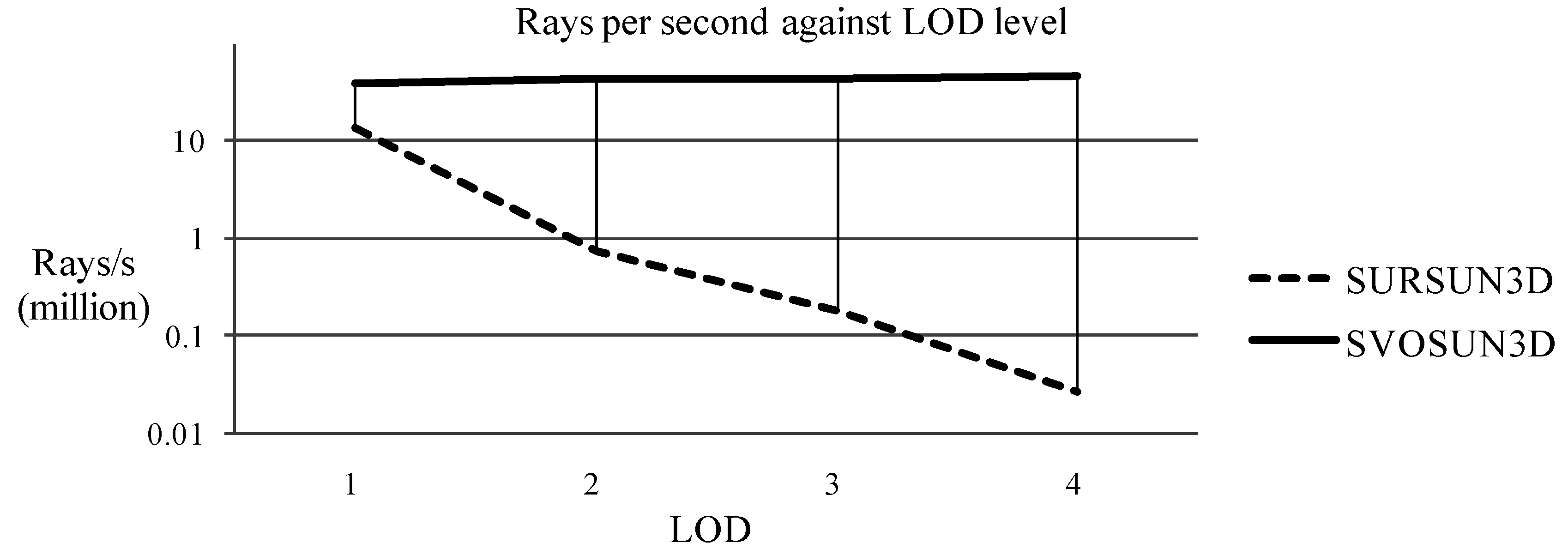
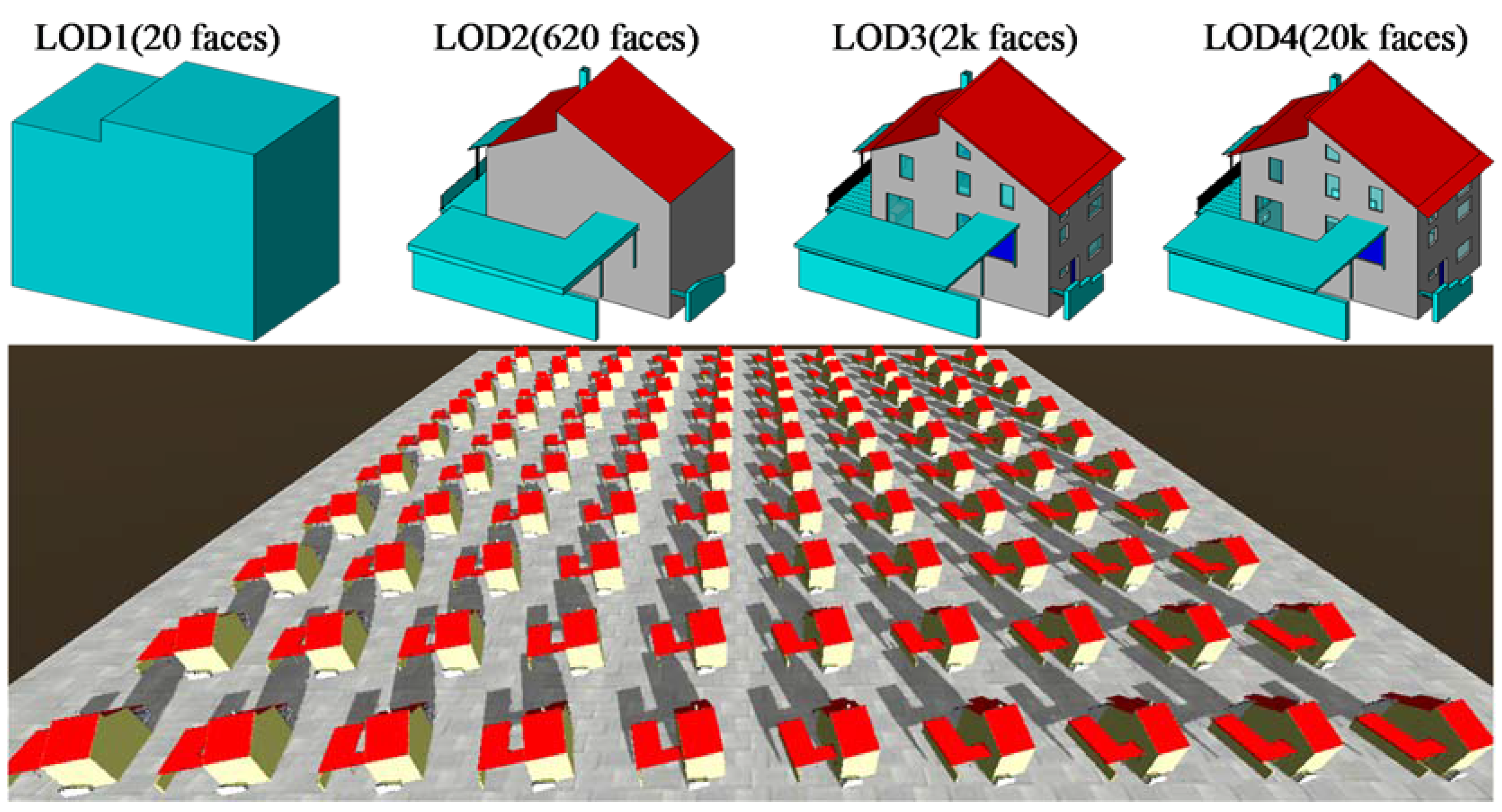
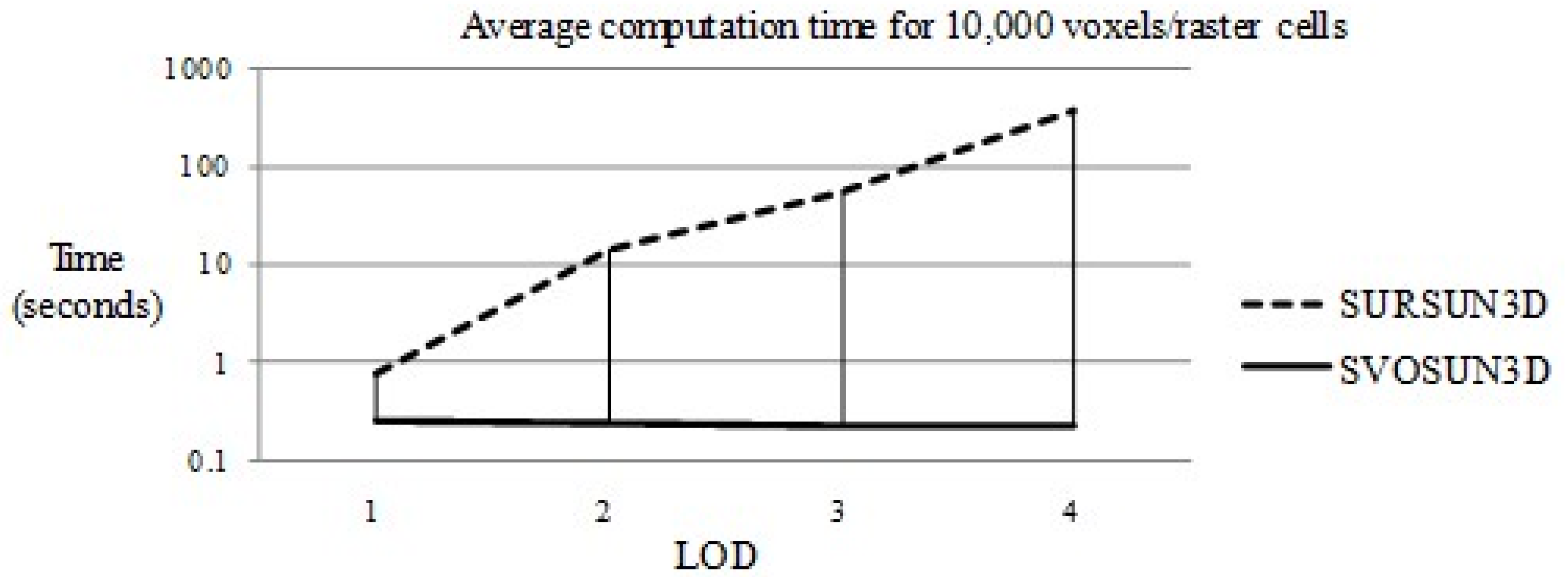
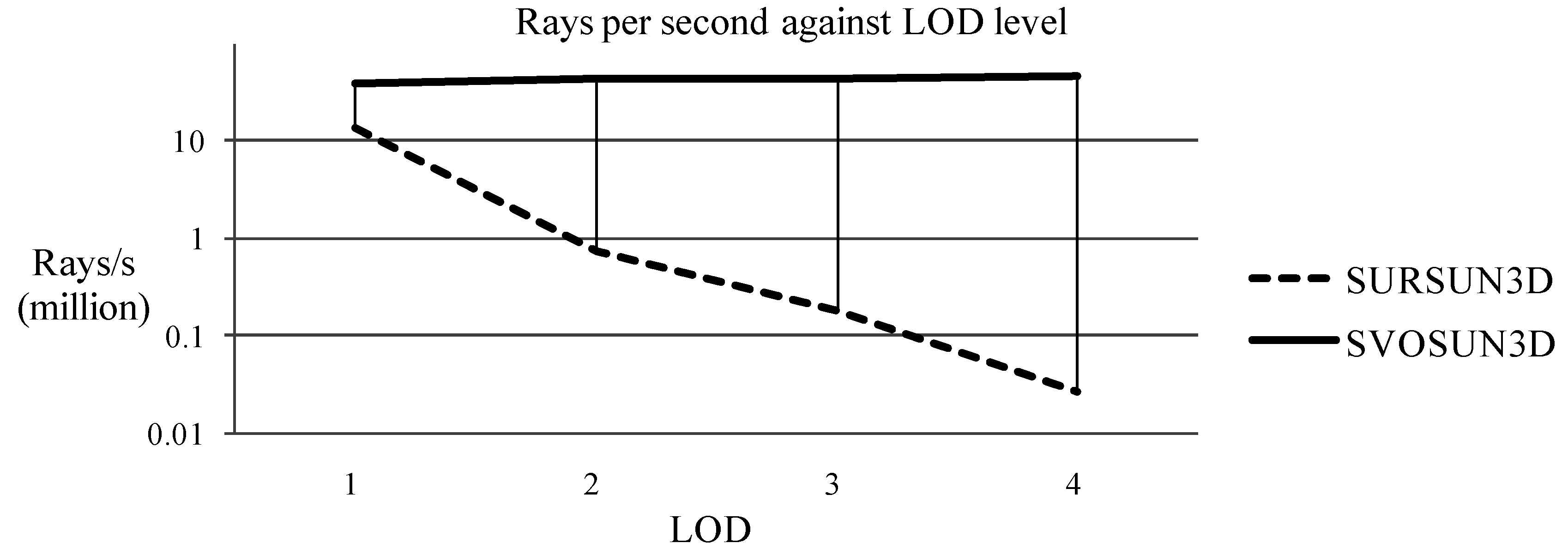
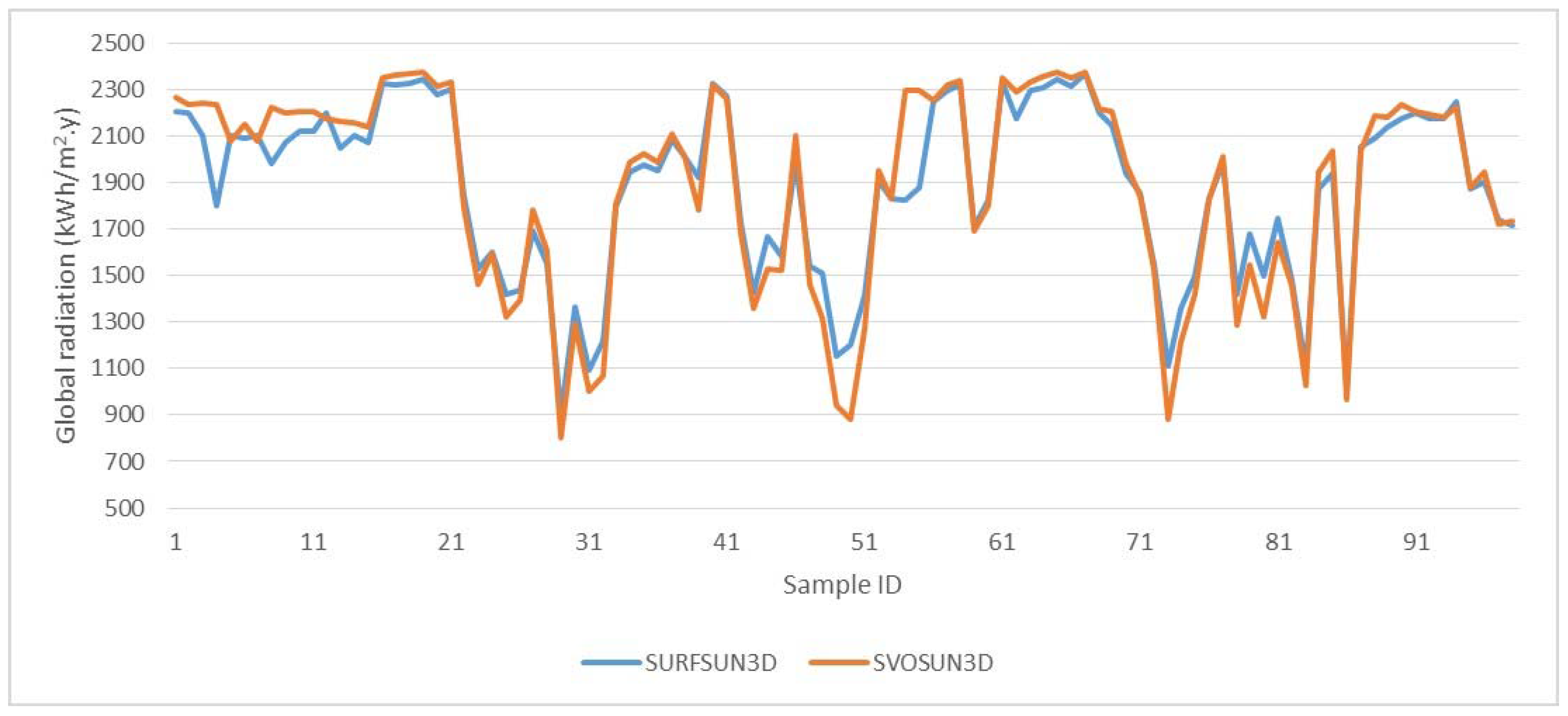
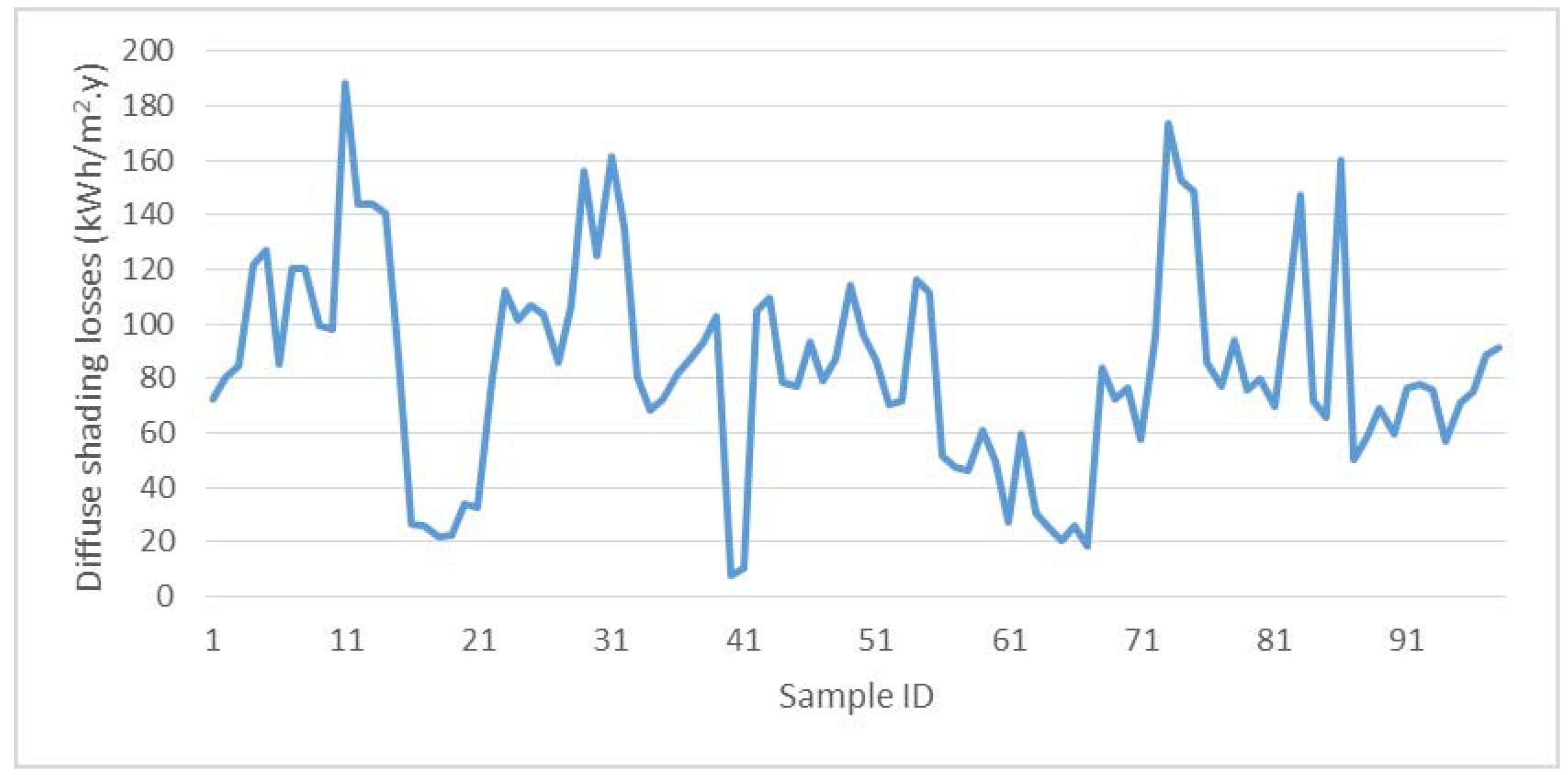
4.1. Scalability to Geometric Complexity and Comparisons
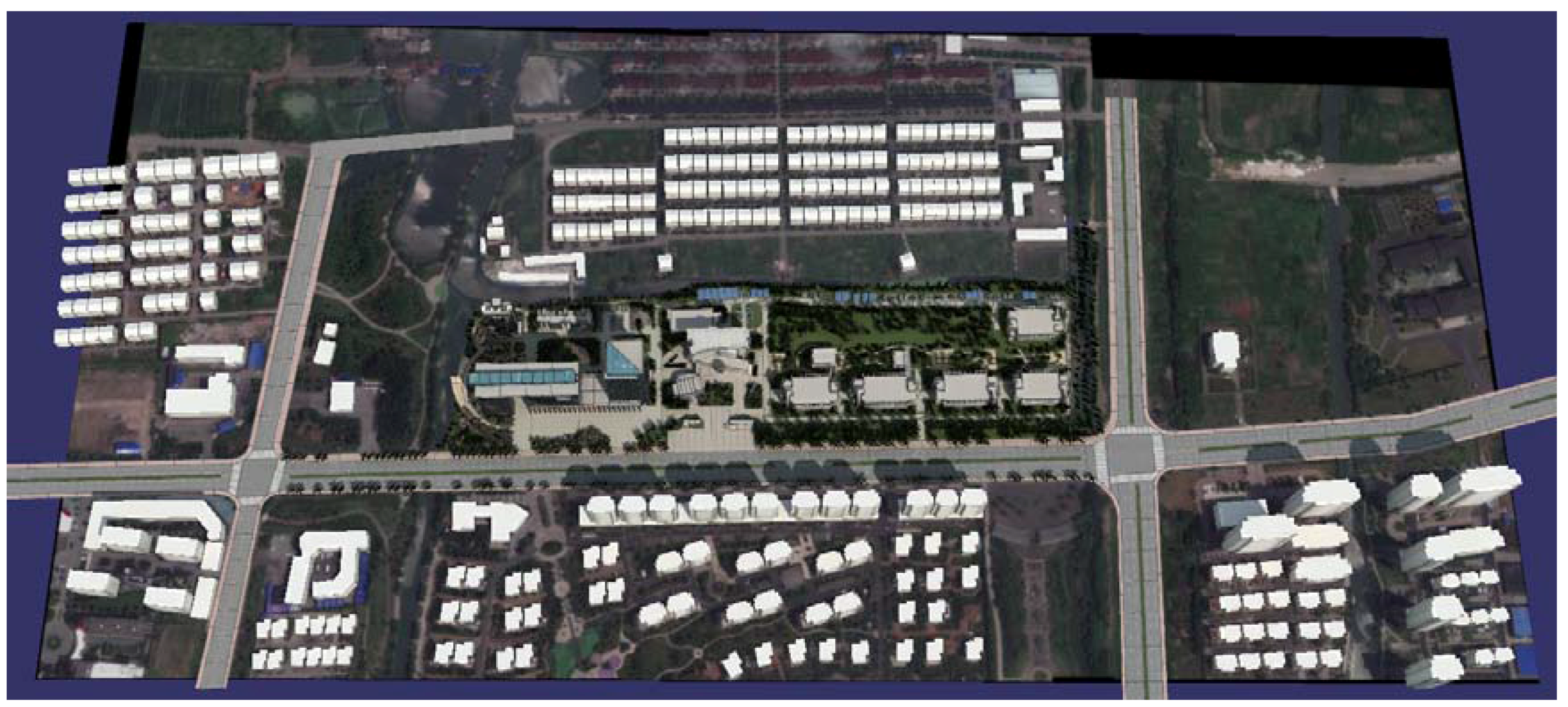
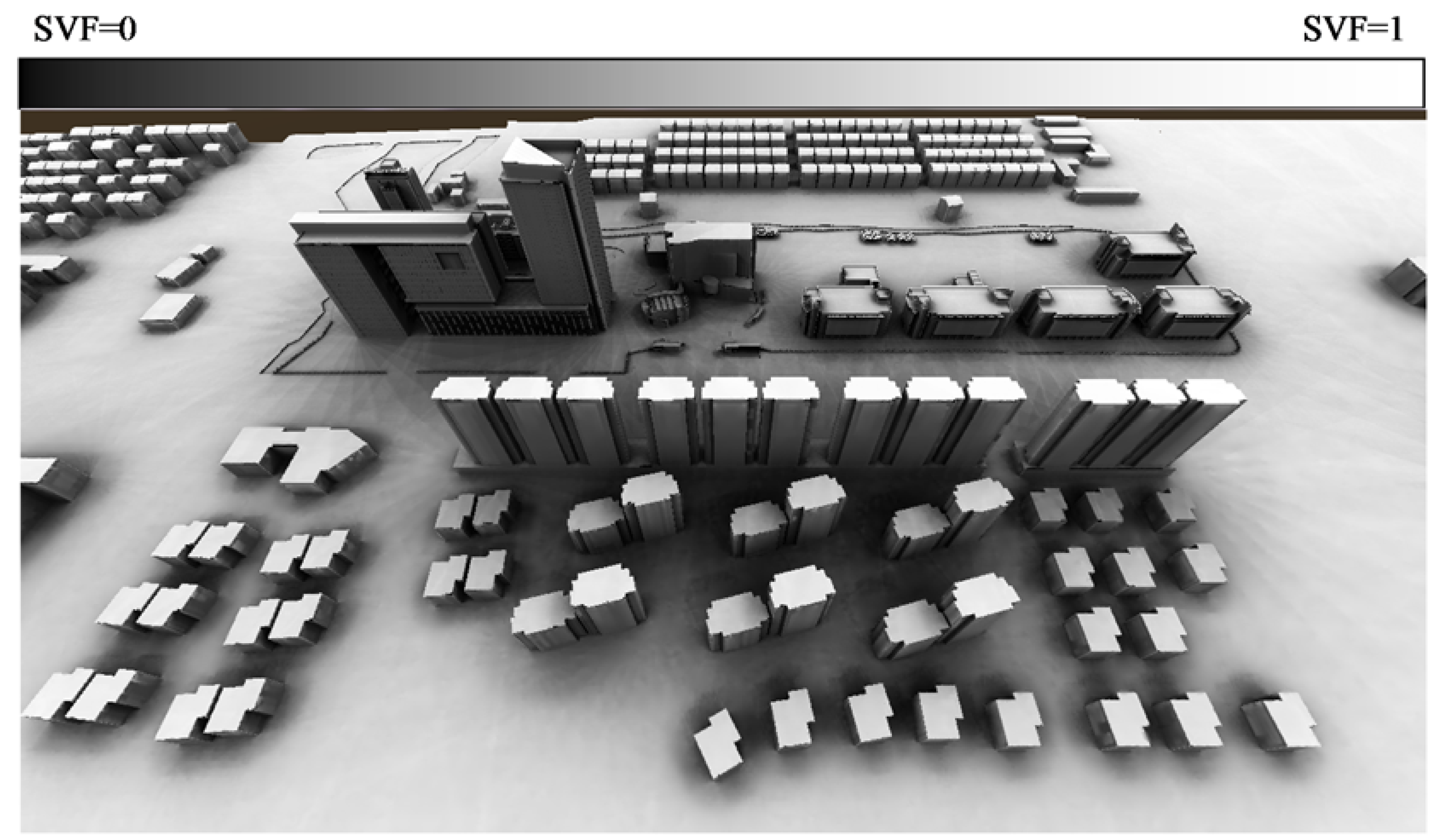
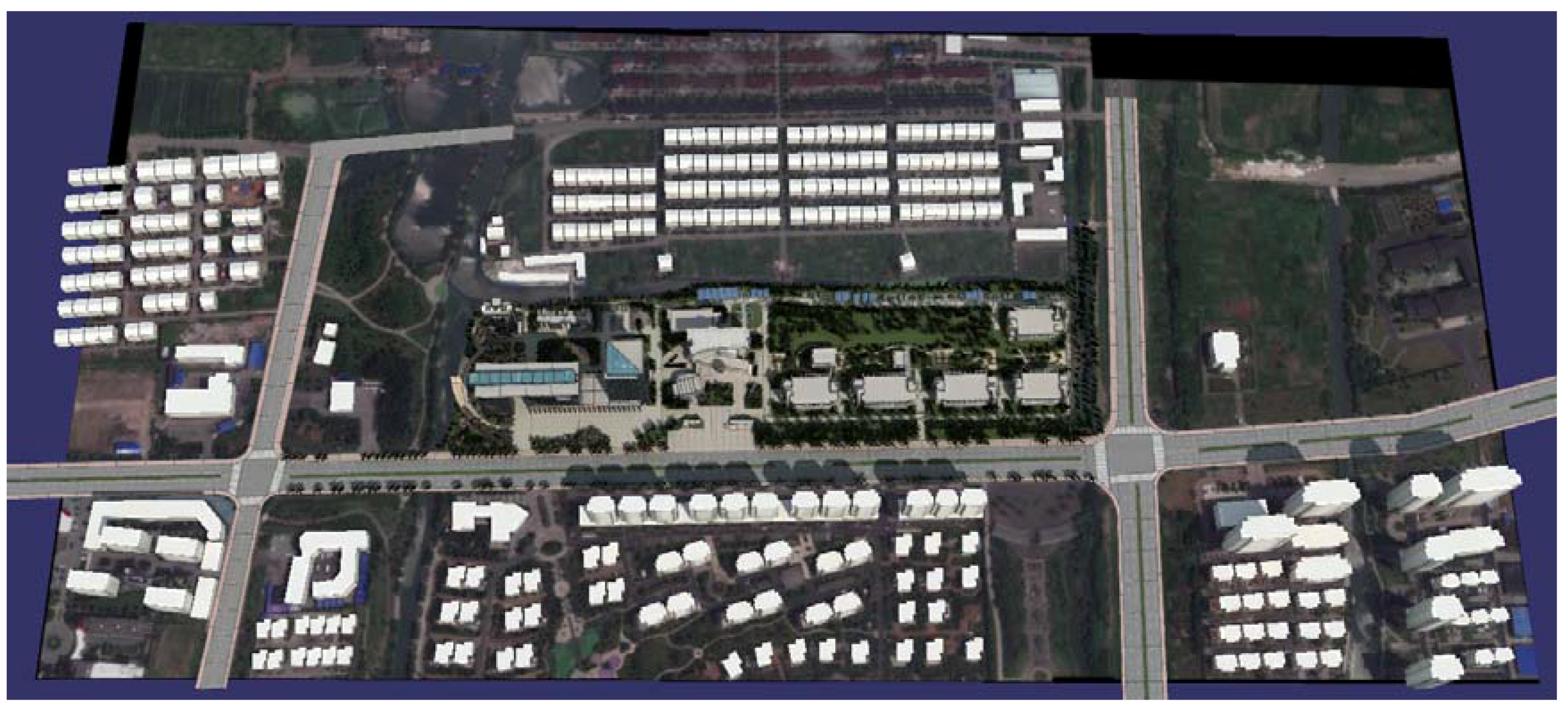
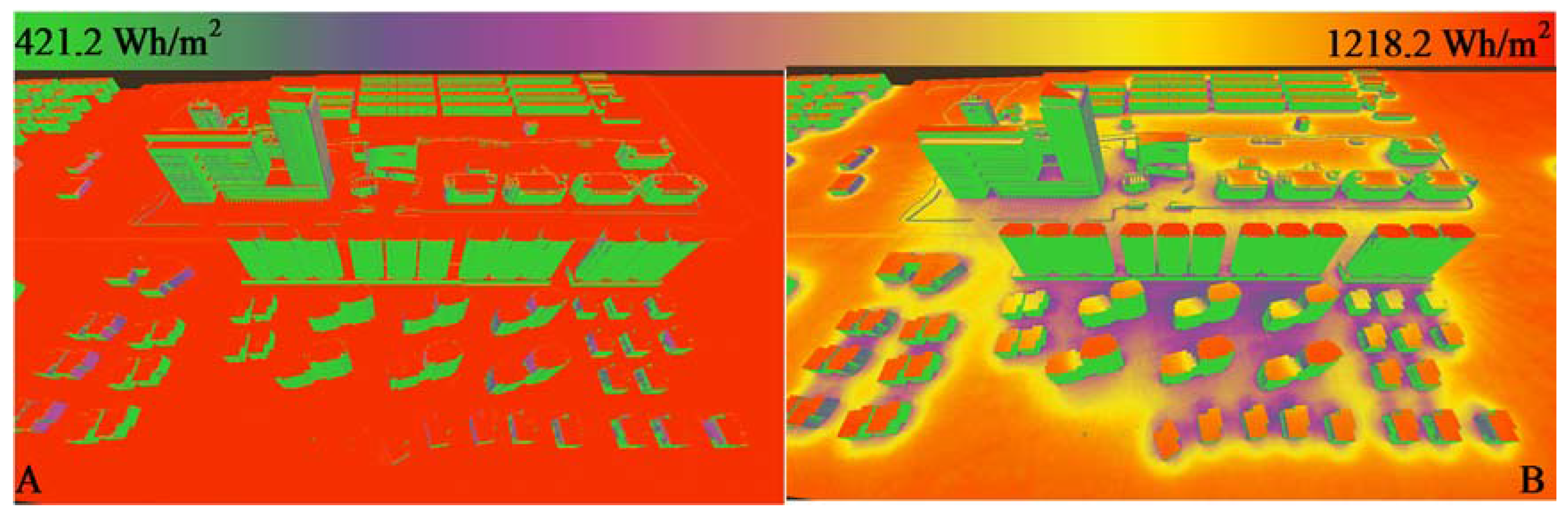
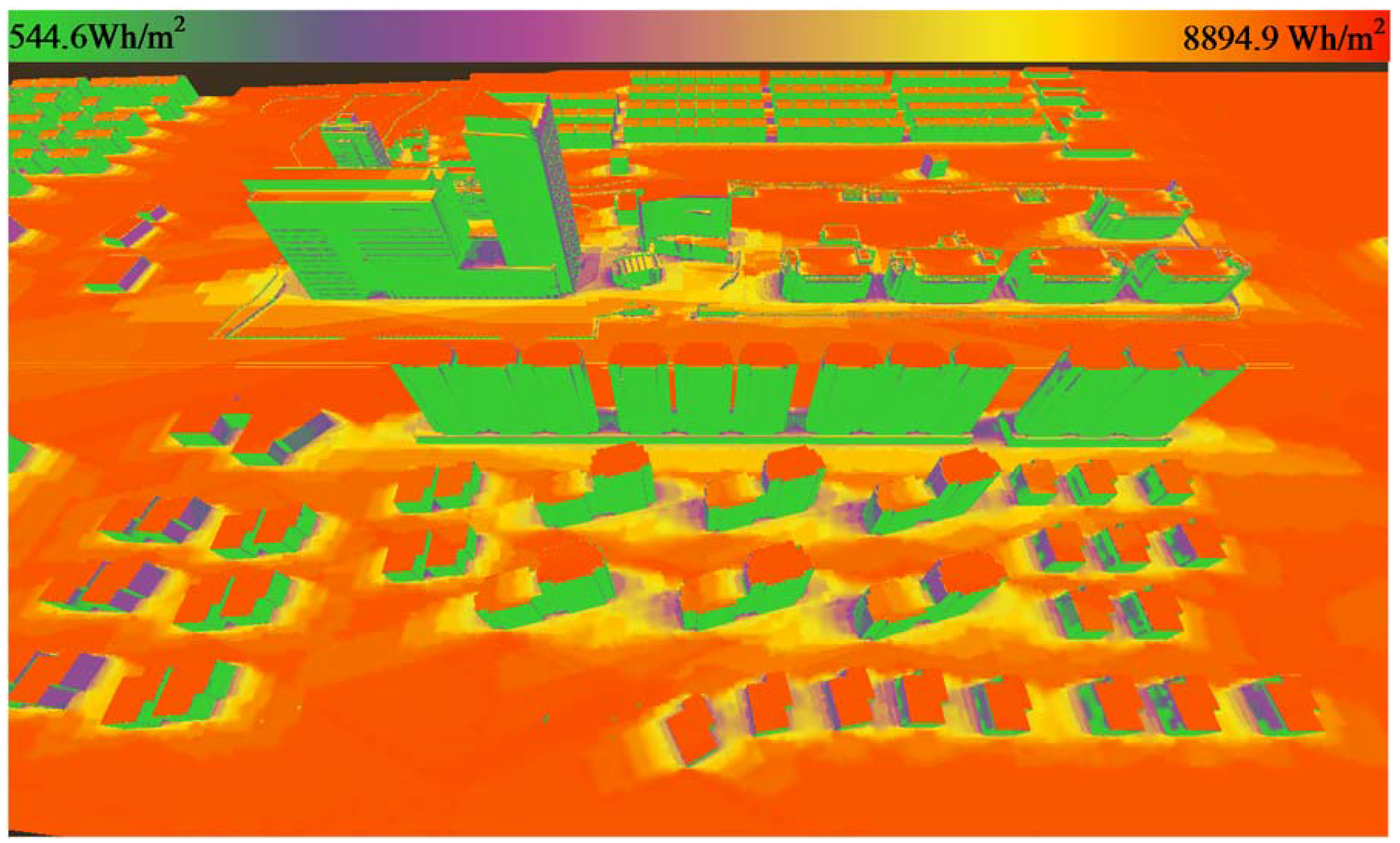
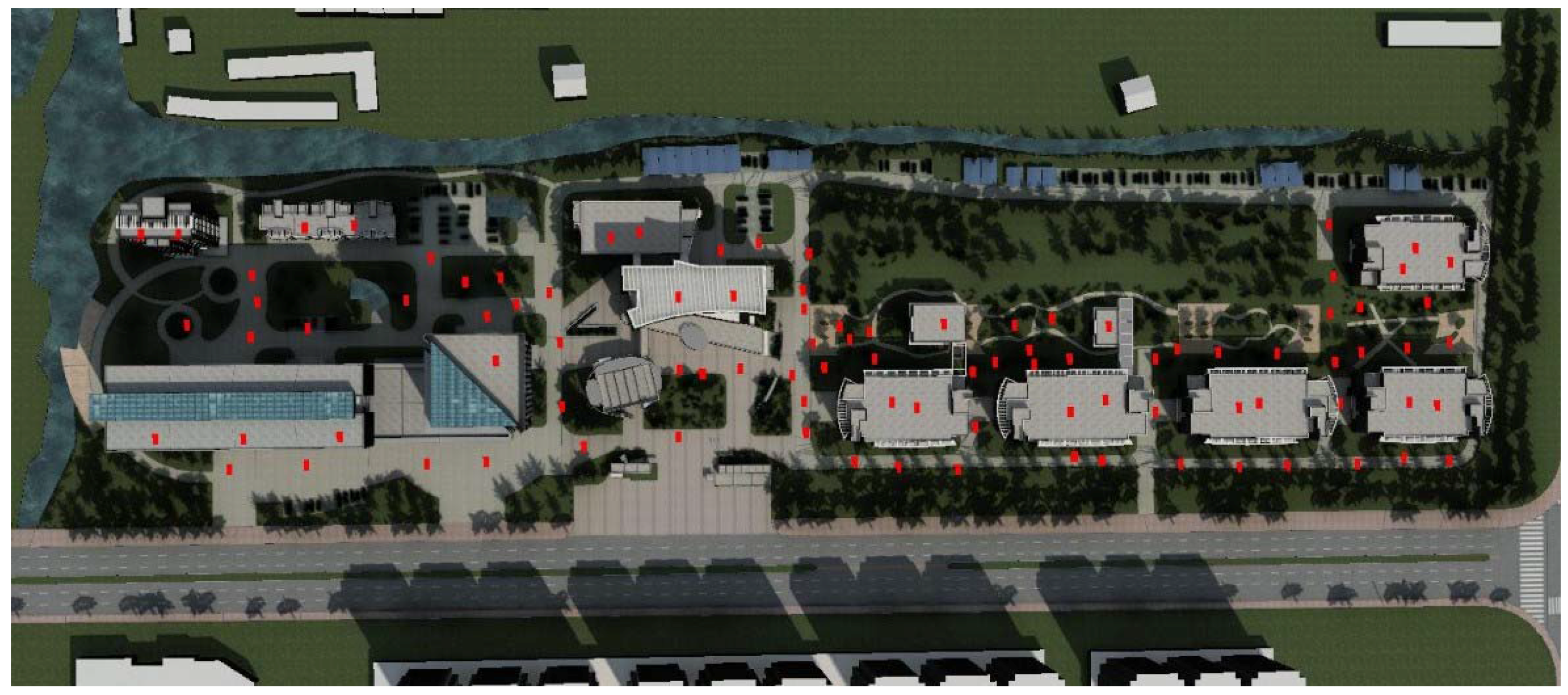
4.2. Potential Application to Urban Planning
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fong, K.F.; Lee, C.K. Towards net zero energy design for low-rise residential buildings in subtropical Hong Kong. Appl. Energy 2012, 93, 686–694. [Google Scholar] [CrossRef]
- Hachem, C.; Athienitis, A.; Fazio, P. Energy performance enhancement in multistory residential buildings. Appl. Energy 2014, 116, 9–19. [Google Scholar] [CrossRef]
- Fu, P.; Rich, P. The Solar Analyst 1.0 User Manual; Helios Environmental Modeling Institute: Lawrence, KS, USA, 2000. [Google Scholar]
- Hofierka, J.; Suri, M.; Šúri, M. The solar radiation model for Open source GIS: Implementation and applications. In Proceedings of the Open Source GIS-GRASS Users Conference, Trento, Italy, 11–13 September 2002; pp. 11–13. [Google Scholar]
- Kryza, M.; Szymanowski, M.; Migała, K.; Pietras, M. Spatial information on total solar radiation: Application and evaluation of the r.sun model for the Wedel Jarlsberg Land, Svalbard. Pol. Polar Res. 2010, 31, 17–32. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Pearce, J.M. Estimating potential photovoltaic yield with r.sun and the open source geographical resources analysis support system. Sol. Energy 2010, 84, 831–843. [Google Scholar] [CrossRef]
- Agugiaro, G.; Remondino, F.; Stevanato, G.; De Filippi, R.; Furlanello, C. Estimation of solar radiation on building roofs in mountainous areas. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 155–160. [Google Scholar] [CrossRef]
- Brito, M.C.; Gomes, N.; Santos, T.; Tenedório, J.A. Photovoltaic potential in a Lisbon suburb using LiDAR data. Sol. Energy 2012, 86, 283–288. [Google Scholar] [CrossRef]
- Lukač, N.; Žalik, B. GPU-based roofs’ solar potential estimation using LiDAR data. Comput. Geosci. 2013, 52, 34–41. [Google Scholar] [CrossRef]
- Redweik, P.; Catita, C.; Brito, M.C. 3D local scale solar radiation model based on urban LIDAR data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 265–270. [Google Scholar] [CrossRef]
- Carneiro, C.M. Extraction of Urban Environmental Quality Indicators using LIDAR-Based Digital Surface Models. Ph.D. Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, June 2011. [Google Scholar]
- Erdélyi, R.; Wang, Y.; Guo, W.; Hanna, E.; Colantuono, G. Three-dimensional SOlar RAdiation Model (SORAM) and its application to 3-D urban planning. Sol. Energy 2014, 101, 63–73. [Google Scholar] [CrossRef]
- Perez, R.; Ineichen, P.; Seals, R.; Michalsky, J.; Stewart, R. Modeling daylight availability and irradiance components from direct and global irradiance. Sol. Energy 1990, 44, 271–289. [Google Scholar] [CrossRef]
- Tooke, T.R.; Coops, N.C.; Christen, A. A point obstruction stacking (POSt) approach to wall irradiance modeling across urban environments. Build. Environ. 2013, 60, 234–242. [Google Scholar] [CrossRef]
- Liang, J.; Gong, J.; Li, W.; Ibrahim, A.N. A visualization-oriented 3D method for efficient computation of urban solar radiation based on 3D-2D surface mapping. Int. J. Geogr. Inf. Sci. 2014, 28, 780–798. [Google Scholar] [CrossRef]
- Hofierka, J.; Zlocha, M. A new 3-D solar radiation model for 3-D city models. Trans. GIS 2012, 16, 681–690. [Google Scholar] [CrossRef]
- Laine, S.; Karras, T. Efficient sparse voxel octrees. IEEE Trans. Vis. Comput. Graph. 2011, 17, 1048–1059. [Google Scholar] [CrossRef] [PubMed]
- Benson, D.; Davis, J. Octree textures. ACM Trans. Graph. 2002, 21, 785–790. [Google Scholar] [CrossRef]
- Liu, M.; Bárdossy, A.; Li, J.; Jiang, Y. GIS-based modelling of topography-induced solar radiation variability in complex terrain for data sparse region. Int. J. Geogr. Inf. Sci. 2012, 26, 1281–1308. [Google Scholar] [CrossRef]
- Rigollier, C.; Bauer, O.; Wald, L. On the clear sky model of the ESRA—European Solar Radiation Atlas—With respect to the heliosat method. Sol. Energy 2000, 68, 33–48. [Google Scholar] [CrossRef]
- Kumar, L.; Skidmore, A.K.; Knowles, E. Modelling topographic variation in solar radiation in a GIS environment. Int. J. Geogr. Inf. Sci. 1997, 11, 475–497. [Google Scholar] [CrossRef]
- Truong-Hong, L.; Laefer, D.F. Octree-based, automatic building facade generation from LiDAR data. CAD Comput. Aided Des. 2014, 53, 46–61. [Google Scholar] [CrossRef]
- Holub, P.; Šrom, M.; Pulec, M.; Matela, J.; Jirman, M. GPU-accelerated DXT and JPEG compression schemes for low-latency network transmissions of HD, 2K, and 4K video. Future Gener. Comput. Syst. 2013, 29, 1991–2006. [Google Scholar] [CrossRef]
- Pätzold, M.; Kolb, A. Grid-free out-of-core voxelization to sparse voxel octrees on GPU. In Proceedings of the 7th Conference on High-Performance Graphics (HPG’ 15), Los Angeles, CA, USA, 7–9 August 2015. [Google Scholar]
- Baert, J.; Lagae, A.; Dutré, P. Out-of-core construction of sparse voxel octrees. Comput. Graph. Forum 2014, 33, 220–227. [Google Scholar] [CrossRef]




© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Gong, J. A Sparse Voxel Octree-Based Framework for Computing Solar Radiation Using 3D City Models. ISPRS Int. J. Geo-Inf. 2017, 6, 106. https://doi.org/10.3390/ijgi6040106
Liang J, Gong J. A Sparse Voxel Octree-Based Framework for Computing Solar Radiation Using 3D City Models. ISPRS International Journal of Geo-Information. 2017; 6(4):106. https://doi.org/10.3390/ijgi6040106
Chicago/Turabian StyleLiang, Jianming, and Jianhua Gong. 2017. "A Sparse Voxel Octree-Based Framework for Computing Solar Radiation Using 3D City Models" ISPRS International Journal of Geo-Information 6, no. 4: 106. https://doi.org/10.3390/ijgi6040106