Optimal Route Searching with Multiple Dynamical Constraints—A Geometric Algebra Approach

 , ,
, ,
Abstract
:1. Introduction
2. Preliminary and Basic Ideas
2.1. Definition of the DMCOP with Type II Dynamics
2.2. Basic Ideas
3. Network Model Representation with GA
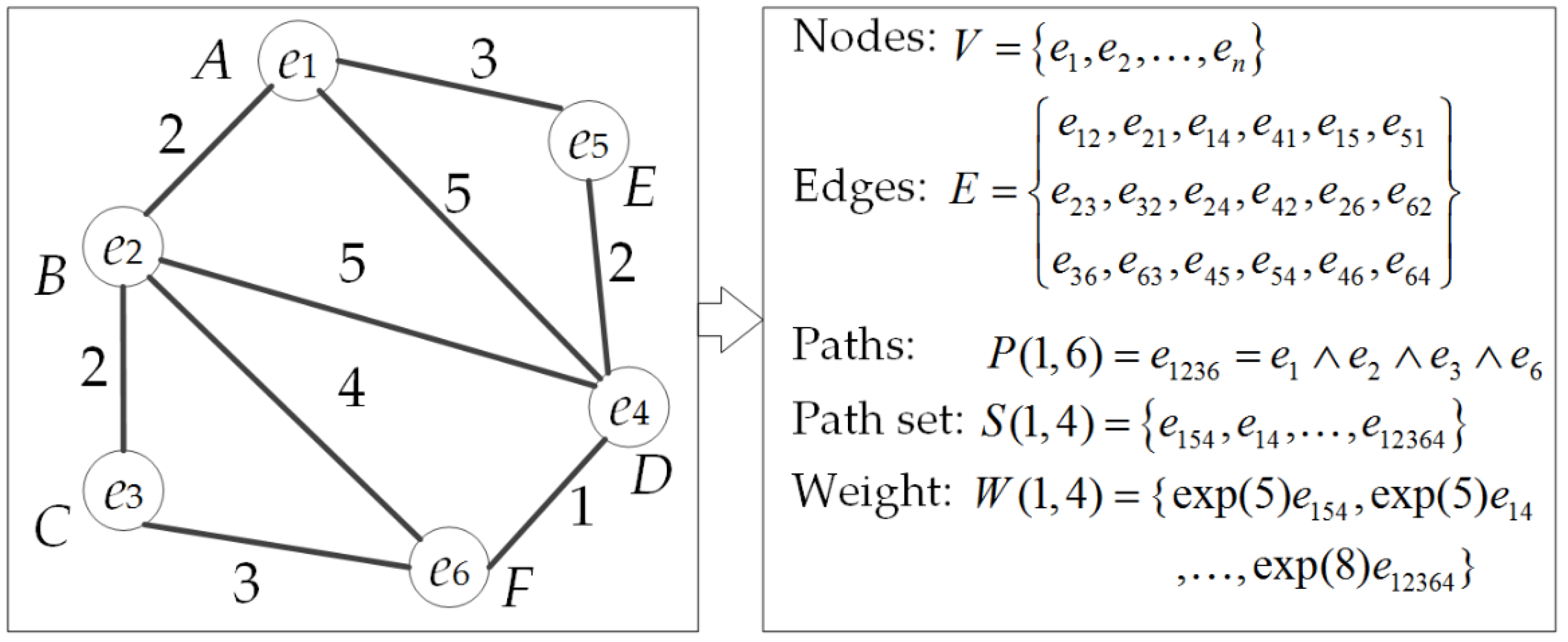
3.1. Basic Network Element Expression with GA
3.2. Dynamic Route Generation with GA
4. GA Expression and Processing of Multiple Constraints
4.1. GA Expression of Multiple Constraints
4.2. Dynamic Filtering of the Path by Constraints
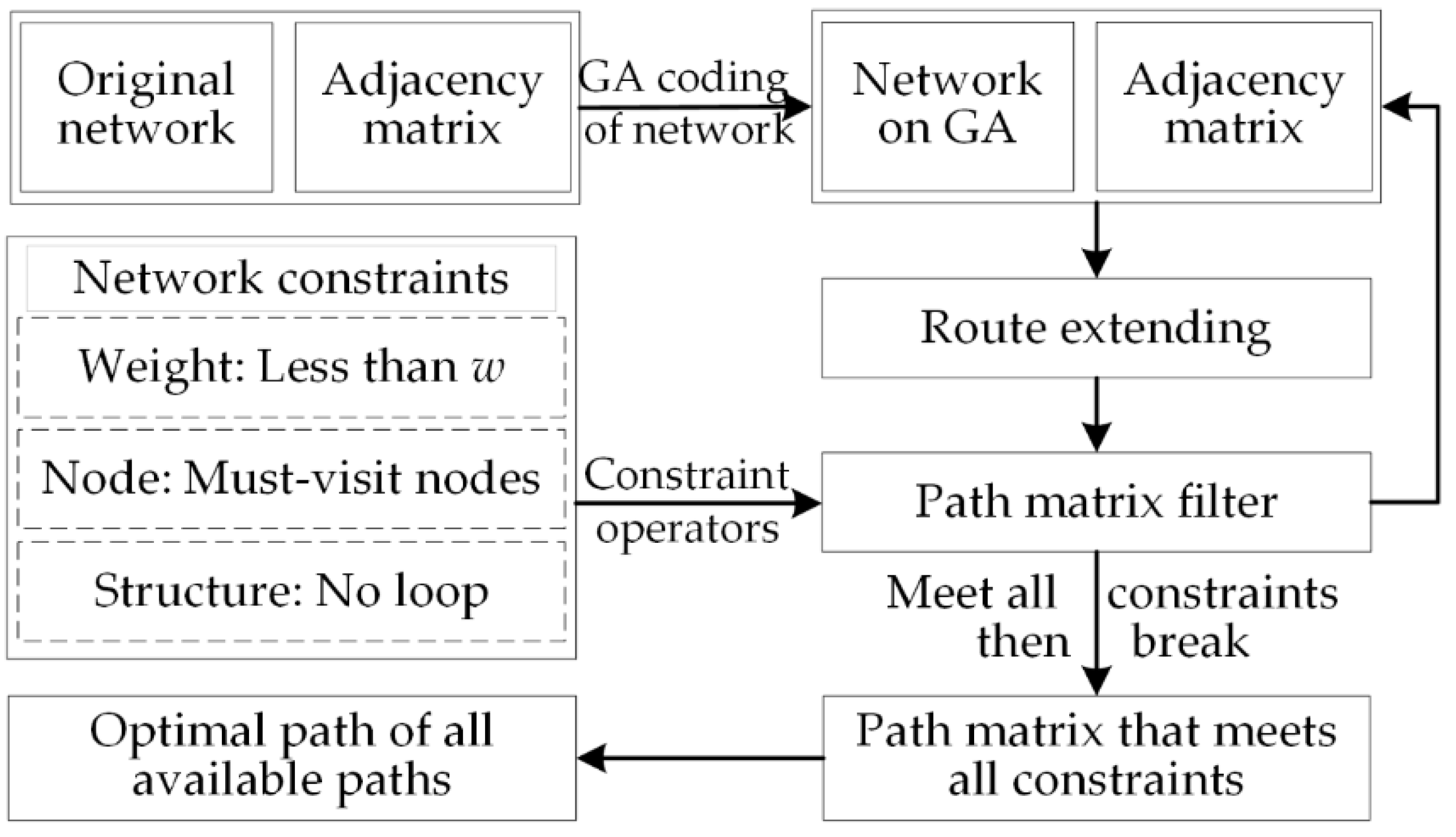
4.3. Greedy Multiconstraint Route-Searching Algorithm
- (1)
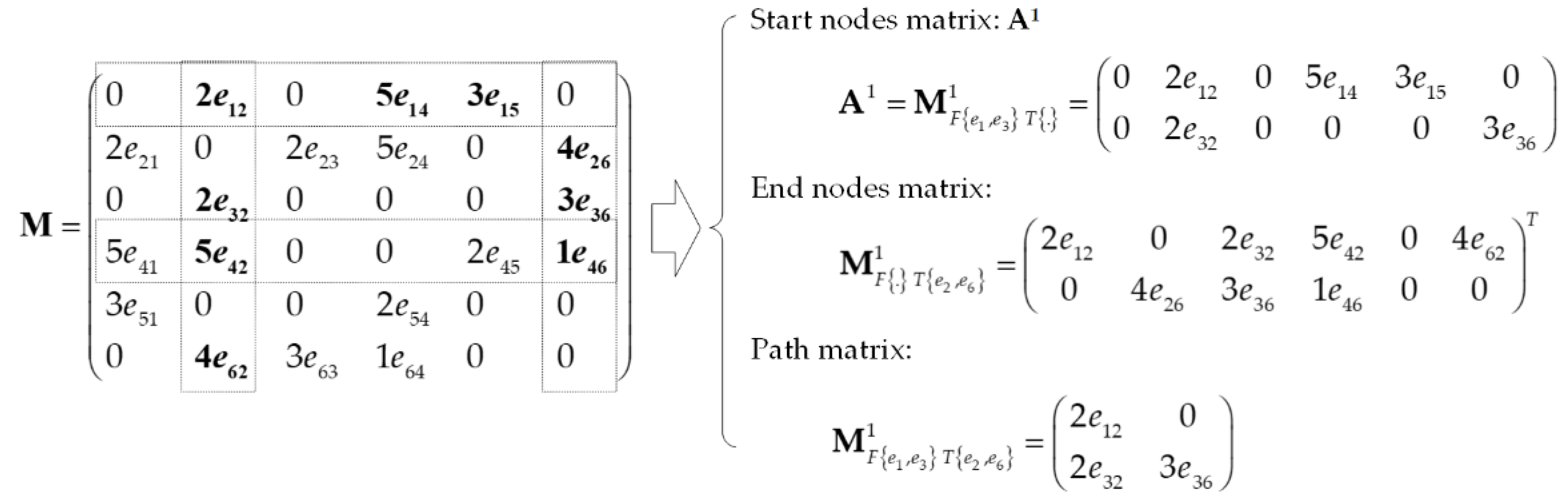
- Construct the adjacent matrix and the computing matrix (start node matrix) via the network data and the start nodes. We selected a subset of elements in the matrix to form the simplified path matrix , which was adopted to store the path that connects the end nodes.
- (2)
- For the given start node and end node , the simplified start node matrix is . Extend the first route by using the formula , which extends the route from time frame to . The final computing matrix can be updated according to the above Formula (15), as the computing matrix has the same start node as , and then the path matrix can be generated according to the end node matrix and defined as .
- (3)
- Apply constraints with the constraining operators and filter the path matrix.
- (4)
- Extend the computing matrix by using the formula and Formula (15).
- (5)
- Repeat the third and fourth steps until all paths that meet the constraints are found.
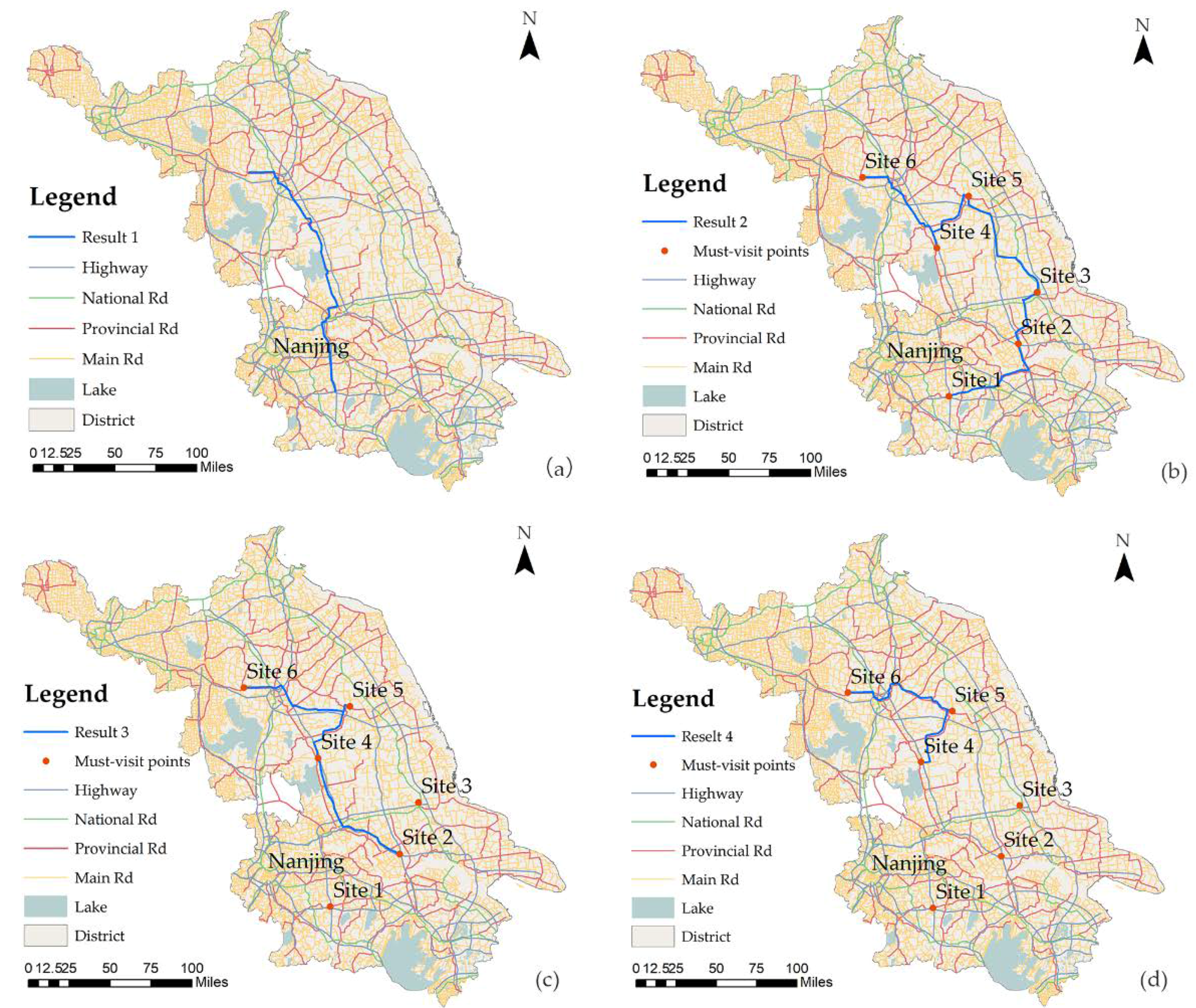
5. Case Study: Application in Dynamic Tourism Planning
6. Comparisons with other Methods
6.1. Support for the Various Constraints
6.2. Efficiency Comparison
7. Discussion
7.1. Potential Application of this Template-Based Approach
7.2. Directions for Future Improvements
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| meaning | meaning of subscript and superscript | |
| G | Network | None |
| V | Nodes | None |
| E | Edges | None |
| P(s, t) | Path from node s to node t | s, t: certain nodes |
| Wm | Main cost weight | m: the first letter of “main” |
| Wc | Constraints set | c: the first letter of “Constraint” |
| Wnc | Node constraints | n: the first letter of “Node” |
| Wwc | Weight constraints | w: the first letter of “Weight” |
| Wtc | Topological constraints | t: the first letter of “Topological” |
| Tc | Time frame | c: the first letter of “Constraint” |
| ti | Inserting time frames of constraints | i: the numerical order, in italics |
| e1, e2, …, en | Basis vector | n: numerical order |
| S(s, t) | Path set from node s to node t | s, t: certain nodes |
| Multiplicative weights | w: the first letter of “Weight”, in italics, * indicates multiplicative weights, i, j: certain nodes | |
| Additive weight | w: the first letter of “Weight”, in italics, + indicates additive weights i, j: certain nodes | |
| Path matrix with the strrt node s and end node t | s, t: certain nodes | |
| Ai | The computing matrix | i: power based on oriented join product |
| gmax | The maximum acceptable threshold | max: the first three letters of “Maximum” |
| gthreshold | The weight threshold | none |
| Outer product | none | |
| Oriented join product | none | |
| CNode() | Node-inclusion constrain operator | Node: node, in italics |
| CNum() | Number constrain operator | Num: number, in italics |
| CLStr() | Linear structure constrain operator | LStr: linear structure, in italics |
| Meet operator | none | |
| Join | none | |
| Norm operator | none | |
| grade() | Dimension calculating operator | none |
| NodeFilterOp() | Node filter operator | none |
| NumericalFilterOp() | Numerical constraints filter operator | none |
| TopologicalFilterOp() | Topological constraints filter operator | none |
References
- Zhang, X.; Chang, G.L. A dynamic evacuation model for pedestrian–vehicle mixed-flow networks. Transp. Res. Part C Emerg. Technol. 2014, 40, 75–92. [Google Scholar] [CrossRef]
- Inada, Y.; Izumi, S.; Koga, M.; Matsubara, S. Development of Planning Support System for Welfare Urban Design—Optimal Route Finding for Wheelchair Users ☆. Procedia Environ. Sci. 2014, 22, 61–69. [Google Scholar] [CrossRef]
- Papinski, D.; Scott, D.M. A GIS-based toolkit for route choice analysis. J. Transp. Geogr. 2011, 19, 434–442. [Google Scholar] [CrossRef]
- Liao, F.; Arentze, T.A.; Timmermans, H.J.P. Constructing personalized transportation networks in multi-state supernetworks: A heuristic approach. Int. J. Geogr. Inf. Sci. 2011, 25, 1885–1903. [Google Scholar] [CrossRef]
- Nepal, K.P.; Park, D. Solving the Median Shortest Path Problem in the Planning and Design of Urban Transportation Networks Using a Vector Labeling Algorithm. Transp. Plan. Technol. 2005, 28, 113–133. [Google Scholar] [CrossRef]
- Bast, H.; Funke, S.; Sanders, P.; Schultes, D. Fast Routing in Road Networks with Transit Nodes. Science 2007, 316, 566. [Google Scholar] [CrossRef] [PubMed]
- Curtin, K.M. Network Analysis in Geographic Information Science: Review, Assessment, and Projections. Cartogr. Geogr. Inf. Sci. 2007, 34, 103–111. [Google Scholar] [CrossRef]
- Van Der Zijpp, N.J.; Catalano, S.F. Path enumeration by finding the constrained K-shortest paths. Transp. Res. Part B Methodol. 2005, 39, 545–563. [Google Scholar] [CrossRef]
- Xie, C.; Waller, S.T. Parametric search and problem decomposition for approximating Pareto-optimal paths. Transp. Res. Part B Methodol. 2012, 46, 1043–1067. [Google Scholar] [CrossRef]
- Mooney, P.; Winstanley, A. An evolutionary algorithm for multicriteria path optimization problems. Int. J. Geogr. Inf. Sci. 2006, 20, 401–423. [Google Scholar] [CrossRef]
- Zeng, W.; Church, R.L. Finding shortest paths on real road networks: The case for A*. Int. J. Geogr. Inf. Sci. 2009, 23, 531–543. [Google Scholar] [CrossRef]
- Liu, P.; Liao, F.; Huang, H.J.; Timmermans, H. Dynamic Activity-Travel Assignment in Multi-State Supernetworks☆. Transportmetrica 2015, 12, 572–590. [Google Scholar] [CrossRef]
- Carlyle, W.M.; Royset, J.O.; Kevin Wood, R. Lagrangian relaxation and enumeration for solving constrained shortest-path problems. Networks 2010, 52, 256–270. [Google Scholar] [CrossRef]
- Di, X.; Liu, H.X. Boundedly rational route choice behavior: A review of models and methodologies. Transp. Res. Part B Methodol. 2016, 85, 142–179. [Google Scholar] [CrossRef]
- Chang, G.; Caneday, L. Web-based GIS in tourism information search: Perceptions, tasks, and trip attributes. Tour. Manag. 2011, 32, 1435–1437. [Google Scholar] [CrossRef]
- Coutinho-Rodrigues, J.; Tralhão, L.; Alçada-Almeida, L. Solving a location-routing problem with a multiobjective approach: The design of urban evacuation plans. J. Transp. Geogr. 2012, 22, 206–218. [Google Scholar] [CrossRef]
- Chen, B.Y.; Lam, W.H.K.; Sumalee, A.; Li, Z. Reliable shortest path finding in stochastic networks with spatial correlated link travel times. Int. J. Geogr. Inf. Sci. 2012, 26, 365–386. [Google Scholar] [CrossRef]
- Vanhove, S.; Fack, V. Route planning with turn restrictions: A computational experiment. Oper. Res. Lett. 2012, 40, 342–348. [Google Scholar] [CrossRef]
- Milakis, D.; Athanasopoulos, K. What about people in cycle network planning? Applying participative multicriteria GIS analysis in the case of the Athens metropolitan cycle network ☆. J. Transp. Geogr. 2014, 35, 120–129. [Google Scholar] [CrossRef]
- Skov-Petersen, H.; Zachariasen, M.; Kefaloukos, P.K. Have a nice trip: An algorithm for identifying excess routes under satisfaction constraints. Int. J. Geogr. Inf. Sci. 2010, 24, 1745–1758. [Google Scholar] [CrossRef]
- Qi, X.; Liu, L.; Liu, S. An Algorithm for Dynamic Optimal Path Selection with Constraint. J. Comput. Inf. Syst. 2008, 5, 25–30. [Google Scholar] [CrossRef]
- Schott, R.; Staples, G.S. Operator Calculus on Graphs: Theory and Applications in Computer Science; World Scientific: Singapore, 2012; ISBN 9781848168763. [Google Scholar]
- Yuan, L.; Yu, Z.; Luo, W.; Zhang, J.; Hu, Y. Clifford algebra method for network expression, computation, and algorithm construction. Math. Methods Appl. Sci. 2014, 37, 1428–1435. [Google Scholar] [CrossRef]
- Yu, Z.; Li, D.; Zhu, S.; Luo, W.; Hu, Y.; Yuan, L. Multisource multisink optimal evacuation routing with dynamic network changes: A geometric algebra approach. Math. Methods Appl. Sci. 2017. [Google Scholar] [CrossRef]
- Yu, Z.; Wang, J.; Luo, W.; Hu, Y.; Yuan, L.; Lü, G. A dynamic evacuation simulation framework based on geometric algebra. Comput. Environ. Urban Syst. 2016, 59, 208–219. [Google Scholar] [CrossRef]
- Chen, P.; Nie, Y. Bicriterion shortest path problem with a general nonadditive cost ☆. Transp. Res. Part B Methodol. 2013, 57, 419–435. [Google Scholar] [CrossRef]
- Pouly, M.; Kohlas, J. Generic Inference: A Unifying Theory for Automated Reasoning; Wiley Publishing: Hoboken, NJ, USA, 2011; ISBN 9780470527016. [Google Scholar]
- Schott, R.; Staples, G.S. Dynamic Geometric Graph Processes: Adjacency Operator Approach. Adv. Appl. Clifford Algebras 2010, 20, 893–921. [Google Scholar] [CrossRef]
- Staples, G.S. A new adjacency matrix for finite graphs. Adv. Appl. Clifford Algebras 2008, 18, 979–991. [Google Scholar] [CrossRef]
- Yuan, L.; Yu, Z.; Chen, S.; Luo, W.; Wang, Y.; Lü, G. CAUSTA: Clifford algebra-based unified spatio-temporal analysis. Trans. GIS 2010, 14, 59–83. [Google Scholar] [CrossRef]
- Garroppo, R.G.; Giordano, S.; Tavanti, L. A survey on multi-constrained optimal path computation: Exact and approximate algorithms. Comput. Netw. 2010, 54, 3081–3107. [Google Scholar] [CrossRef]
- Liu, L.; Mu, H.; Yang, X.; He, R.; Li, Y. An oriented spanning tree based genetic algorithm for multi-criteria shortest path problems. Appl. Soft Comput. J. 2012, 12, 506–515. [Google Scholar] [CrossRef]
- Yu, Z.; Yuan, L.; Luo, W.; Feng, L.; Lv, G. Spatio-Temporal Constrained Human Trajectory Generation from the PIR Motion Detector Sensor Network Data: A Geometric Algebra Approach. Sensors 2016, 16, 43. [Google Scholar] [CrossRef] [PubMed]
- Agdeppa, R.P.; Yamashita, N.; Fukushima, M. The traffic equilibrium problem with nonadditive costs and its monotone mixed complementarity problem formulation. Transp. Res. Part B Methodol. 2007, 41, 862–874. [Google Scholar] [CrossRef]
- Schott, R.; Staples, G.S. Nilpotent adjacency matrices, random graphs and quantum random variables. J. Phys. A Math. Theor. 2008, 41, 155205. [Google Scholar] [CrossRef]
- Slimane, J.B.; René, S.; Song, Y.; Staples, G.S.; Tsiontsiou, E. Operator Calculus Algorithms for Multi-Constrained Paths; Southern Illinois University: Edwardsville, IL, USA, 2015; ISSN 1814-04. [Google Scholar]
- Mohri, M. Semiring Frameworks and Algorithms for Shortest-Distance Problems. J. Autom. Lang. Comb. 2013, 7, 321–350. [Google Scholar] [CrossRef]
- Nash, E.; Cope, A.; James, P.; Parker, D. Cycle Network Planning: Towards a Holistic Approach Using Temporal Topology. Transp. Plan. Technol. 2005, 28, 251–271. [Google Scholar] [CrossRef]
- Lozano, L.; Medaglia, A.L. On an Exact Method for the Constrained Shortest Path Problem; Elsevier Science Ltd.: New York, NY, USA, 2013. [Google Scholar]
- Yang, B.; Luan, X.; Zhang, Y. A Pattern-Based Approach for Matching Nodes in Heterogeneous Urban Road Networks. Trans. GIS 2015, 18, 718–739. [Google Scholar] [CrossRef]
- Li, Q.; Chen, B.Y.; Wang, Y.; Lam, W.H.K. A Hybrid Link-Node Approach for Finding Shortest Paths in Road Networks with Turn Restrictions. Trans. GIS 2015, 19, 3059–3068. [Google Scholar] [CrossRef]
- Tong, L.; Zhou, X.; Miller, H.J. Transportation network design for maximizing space–time accessibility. Transp. Res. Part B Methodol. 2015, 81, 555–576. [Google Scholar] [CrossRef]
- Zheng, N.; Geroliminis, N. Modeling and optimization of multimodal urban networks with limited parking and dynamic pricing. Transp. Res. Part B Methodol. 2016, 83, 36–58. [Google Scholar] [CrossRef]
- Arbex, R.O.; Cunha, C.B. Da Efficient transit network design and frequencies setting multi-objective optimization by alternating objective genetic algorithm. Transp. Res. Part B Methodol. 2015, 81, 355–376. [Google Scholar] [CrossRef]
- Hildenbrand, D. Foundations of Geometric Algebra Computing. AIP Conf. Proc. 2012, 1479, 27–30. [Google Scholar] [CrossRef]
- Jafari, E.; Pandey, V.; Boyles, S.D. A decomposition approach to the static traffic assignment problem. Transp. Res. Part B Methodol. 2017, 105, 270–296. [Google Scholar] [CrossRef]
- Sanders, P.; Schultes, D. Highway Hierarchies Hasten Exact Shortest Path Queries; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steps | Demands | Constraints |
|---|---|---|
| Step 1 | Site 1 to Site 6 | The shortest path from Site 1 to Site 6 |
| Step 2 | Site 1 to Site 6; pass Site 2, Site 3, Site 4, and Site 5 | The shortest path from Site 1 to Site 6 with the node constraint of Site 2, Site 3, Site 4, and Site 5 |
| Step 3 | Site 2 to Site 6; pass Site 4 and Site 5 | The shortest path from Site 2 to Site 6 with the node constraint of Site 4 and Site 5 |
| Step 4 | Site 4 to Site 6; pass Site 5; cannot use the highway road | The shortest path from Site 4 to Site 6 with the node constraint of Site 5, and with the attribute-related constraint that cannot use highway road |
| Constraints ID | Constraints Type | Examples |
|---|---|---|
| 1 | Node-inclusion constraints | Node ID 1106 must be included in the final route |
| 2 | Additive numerical constraints | The length of the path should be less than 200 km |
| 3 | Additive numerical constraints | The velocity of the path should be greater than 60 km/h |
| 4 | Multiplicative numerical constraints | The tourism cost (distance∙time) should be less than 300 km∙hour |
| 5 | Route structure–related constraints | The tourism route should be circular |
| 6 | Route structure–related constraints | The tourism route should not be circular |
| 7 | Route attribute-related constraints | The route must use the highway |
| Algorithms | |||||
|---|---|---|---|---|---|
| Constraints | LRT | Yen’s K-Path Algorithm | Modified Staples’s K-Cycle Algorithm | Lozano‘s Exact Method | Our Algorithm |
| Node-inclusion | + | - | + | - | ++ |
| Additive numerical | ++ | ++ | ++ | ++ | ++ |
| Multiplicative numerical | - | - | ++ | ++ | ++ |
| Multiple weight | - | - | ++ | ++ | ++ |
| Route structure–related | - | - | + | - | ++ |
| Route attribute-related | + | - | - | - | + |
| Algorithm | LRT | Yen’s K-Path Algorithm | Lozano‘s Exact Method | Our Algorithm |
|---|---|---|---|---|
| With Constraints ID 1 | / | / | / | 114.5 |
| With Constraints ID 2 | 17.6 | 23.6 | 12.1 | 34.5 |
| With Constraints ID 3 | 15.7 | 21.8 | 11.6 | 33.2 |
| With Both Constraints ID 3 and 4 | / | / | 25.2 | 36.7 |
| With Constraints ID 5 | / | / | / | 299.7 |
| With Constraints ID 6 | / | / | / | 214.7 |
| With Constraints ID 7 | / | / | / | 32.1 |
| With Constraints ID 1–5 + 7 | / | / | / | 298.9 |
| With Constraints ID 1–4 + 6, 7 | / | / | / | 278.7 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Yu, Z.; Luo, W.; Hu, Y.; Che, X.; Yuan, L. Optimal Route Searching with Multiple Dynamical Constraints—A Geometric Algebra Approach. ISPRS Int. J. Geo-Inf. 2018, 7, 172. https://doi.org/10.3390/ijgi7050172
Li D, Yu Z, Luo W, Hu Y, Che X, Yuan L. Optimal Route Searching with Multiple Dynamical Constraints—A Geometric Algebra Approach. ISPRS International Journal of Geo-Information. 2018; 7(5):172. https://doi.org/10.3390/ijgi7050172
Chicago/Turabian StyleLi, Dongshuang, Zhaoyuan Yu, Wen Luo, Yong Hu, Xiaoyu Che, and Linwang Yuan. 2018. "Optimal Route Searching with Multiple Dynamical Constraints—A Geometric Algebra Approach" ISPRS International Journal of Geo-Information 7, no. 5: 172. https://doi.org/10.3390/ijgi7050172