Simulation and Experimental Evaluation of a Flexible Time Triggered Ethernet Architecture Applied in Satellite Nano/Micro Launchers

 ,
,  ,
, 
Abstract
:1. Introduction
- use of Common-Off-The-Shelf (COTS) Ethernet technology as much as possible with the addition of the minimum number of functional components for the support of real-time traffic;
- use of traditional Ethernet switches, full duplex transmission and simple network topology in order to reduce the number of both nodes and ports;
- implementation of a real-time layer bypassing the Transmission Control Protocol/User Datagram Protocol/Internet Protocol (TCP/UDP/IP) stack to avoid potential delays introduced by this protocols;
- definition of a layer for the scheduling of messages so as to guarantee the Quality of Service (QoS) requested by the Guide, Navigation and Control and telemetry applications.
- to define a low cost FTTE-based architecture for the communication system of a NMLV; we describe in detail all of the aspects as functionalities, message and frame structures;
- we extend the solution proposed in [13] to the case of networks equipped with Ethernet switches and we define an ad-hoc message scheduling algorithm that allows for the parallel delivery of messages with different sources and destinations;
- to compare the proposed solution with the TTEthernet one in terms of effectiveness in using the network bandwidth;
- to provide an experimental investigation of the proposed solution by means of the realization of an experimental test-bed equipped with Ethernet switches and market boards in which the proposed protocols are implemented.
2. Related Work
3. Nano/Micro Launcher Communication System
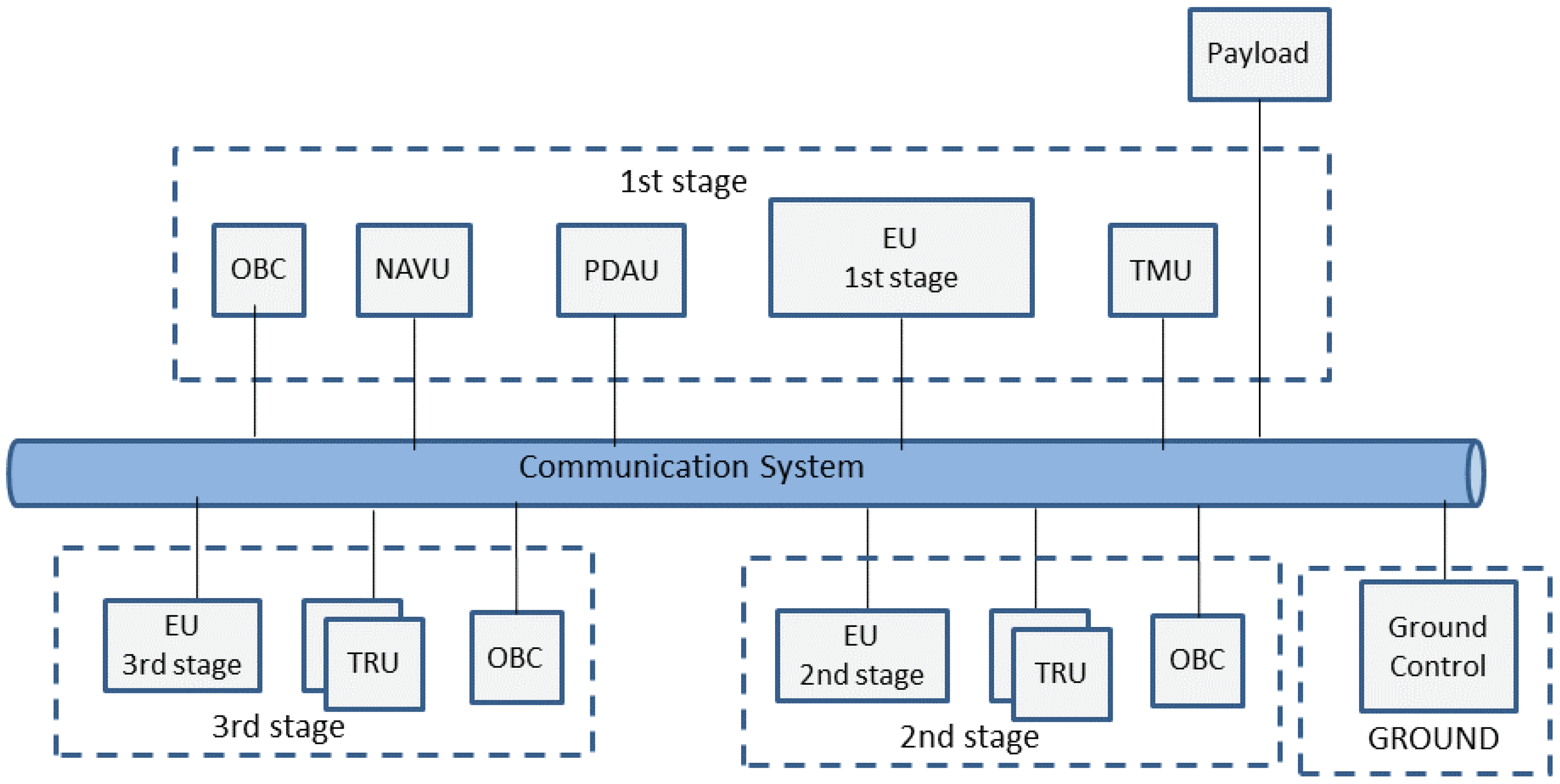
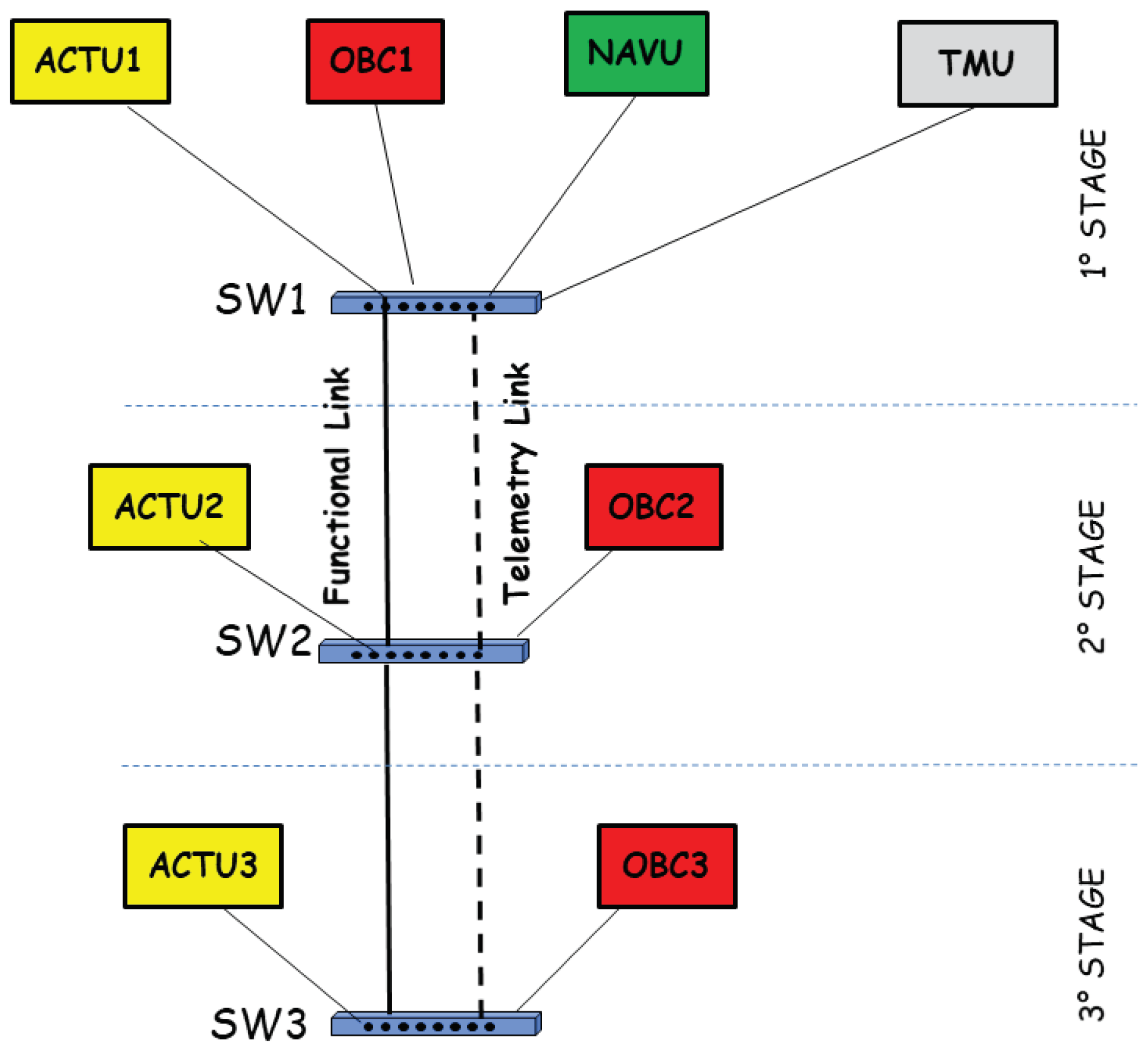
- The Guidance, Navigation and Control (GNC) Subsystem, which groups sensors, actuators and data handling needed to perform a mission; it also includes the battery power sources;
- The Telemetry Subsystem (TMS), which groups sensors, data handling and Radio Frequency (RF) telemetry transmission chain.
- Navigation Unit (NAVU) with its flight software;
- On Board Computer (OBC) with its flight software that will perform the GNC functions needed during the flight and the management of other functions of the launcher on the basis of a “mission timeline”;
- Power Distribution and Actuation Unit (PDAU) that performs several actuations and operations needed by flight management (main engine firings, stage separations, etc.);
- Thrust Vector Control (TVC) subsystems, one for each stage, comprised of one Electronic control Unit (EU) and one mechanical actuator;
- Telemetry Master Unit (TMU) that receives telemetry messages from all of the terminals and send them to the ground station;
- Ground Control (GC) that follows the preliminary and the first phases of the mission;
- Telemetry Remote Units (TRUs) collect the sensor data from each stage and send the acquired information to the TMU; currently in the 1553B bus of VEGA [3], these units are connected to another communications system different from the one transporting GNC messages.
- GNC messages: they are needed for the guide, navigation and control operations;
- telemetry messages: they are sent to Ground using the TMU equipment; the TMU will manage two types of data: (i) CVI (Control Visuel Immediate) transmitted to Ground, immediately visible on screen by mission control and used by Mission Control to decide the launch vehicle destruction in case of anomalies; (ii) CVD (Control Visuel Differe) transmitted to ground as soon as possible and stored on Ground for post-processing purposes.
- sporadic messages: they belong to the sporadic sequences that are a set of predefined messages separated by predefined time intervals; a sequence is executed once, or more than once along the mission, to perform sporadic functional orders (e.g., stage separation, engine ignition, etc.).
4. Flexible Time Triggered Ethernet Architecture for Nano/Micro Launcher Networks
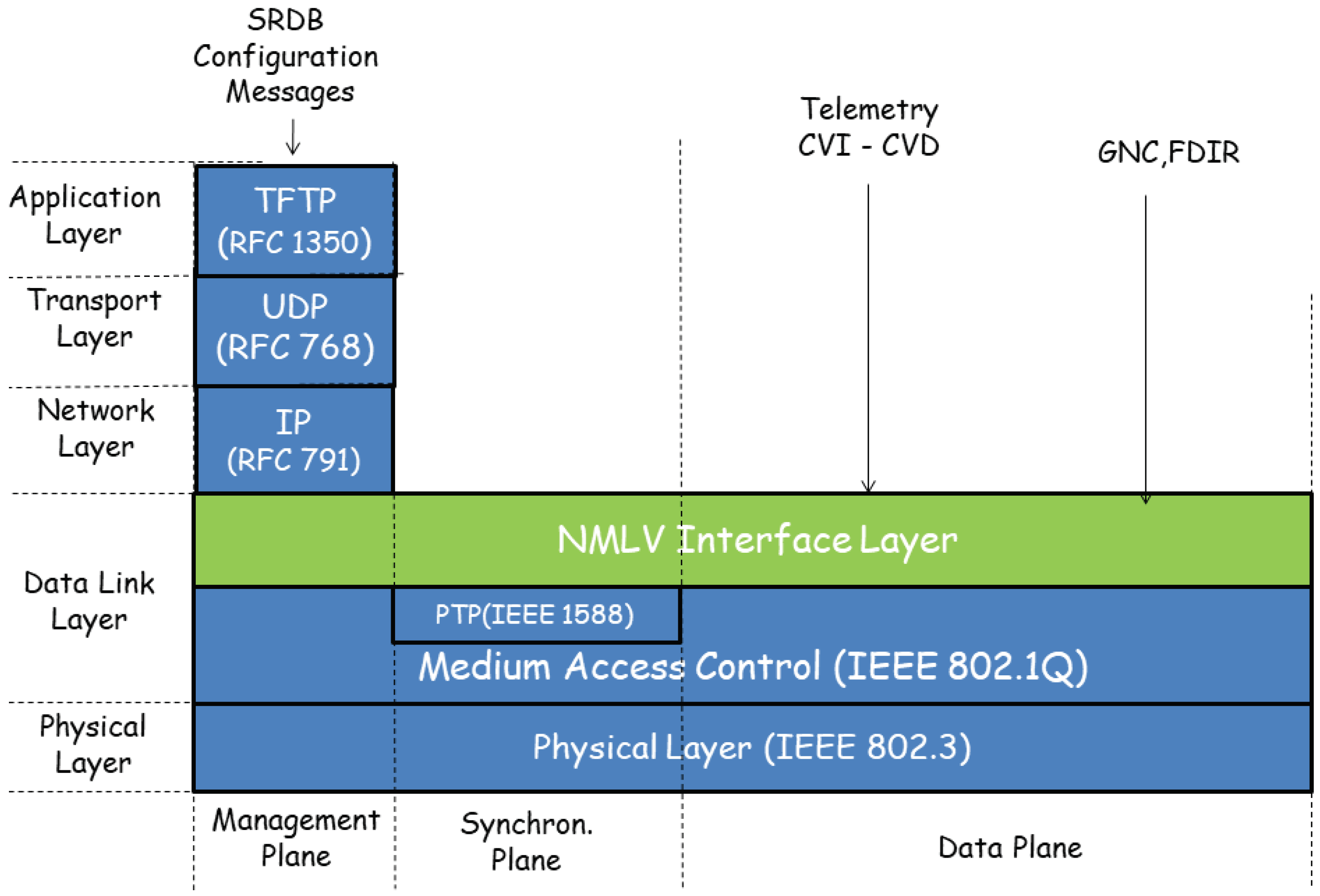
- the data plane that delivers data messages and manages the message sending/receiving on redundant channels;
- the synchronization plane that performs the synchronizations of local clocks of the end systems;
- the management plane that configures the network, by updating/changing the System Requirement Database (SRDB) of a master node that stores the time instants in which the messages are scheduled to be sent.
4.1. Data Link Layer
4.1.1. IEEE 802.1Q Layer
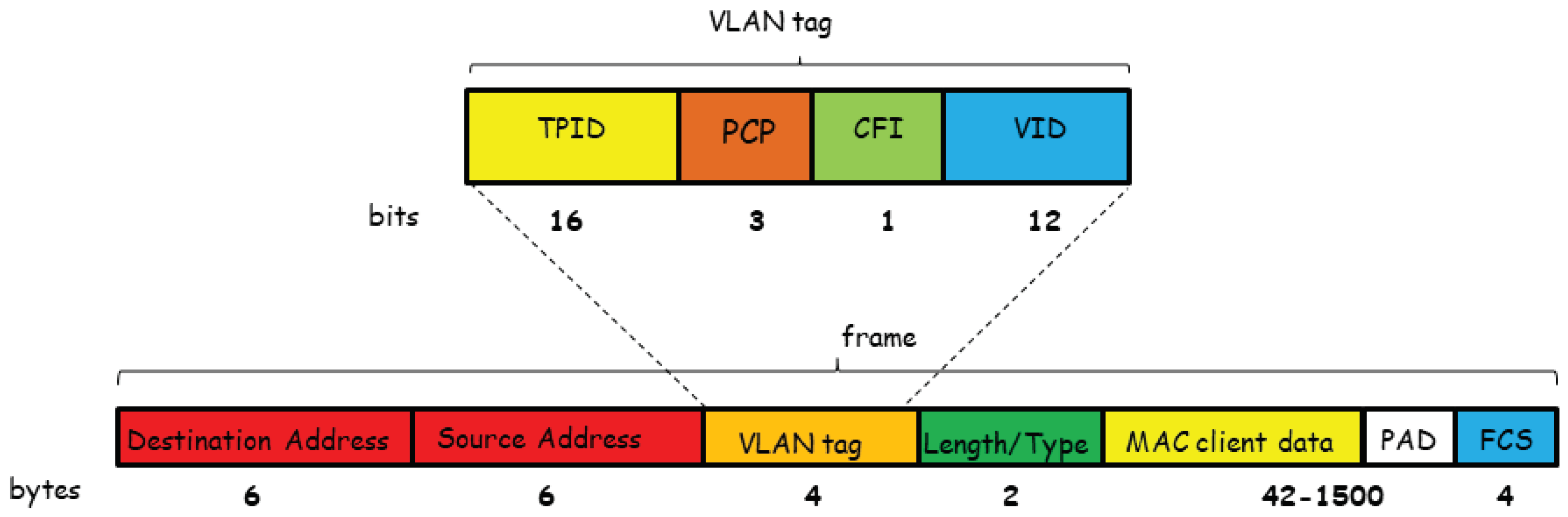
- Tag Protocol Identifier (TPID) is a 16-bit field set to a value of 0x8100 in order to identify the frame as an IEEE 802.1Q-tagged frame;
- Priority Code Point (PCP) is a 3-bit field which refers to the IEEE 802.1p class of service priority. This field indicates the frame priority level which can be used to support different QoS, in terms of delivery delay;
- Canonical Format Indicator (CFI) is a 1-bit field that indicates if the MAC address is in non canonical (1) or canonical (0) format;
- VLAN Identifier (VID) is a 12-bit field that uniquely identifies the VLAN to which the frame belongs.
4.1.2. NMLV Interface Layer
- we remove the polling requests mechanism of the asynchronous window in the NMLV; we assume that all of the real-time traffic is periodic and a priori scheduled so as to emulate the circuit behavior of the traditional communication system for launch vehicles as 1553B bus [2];
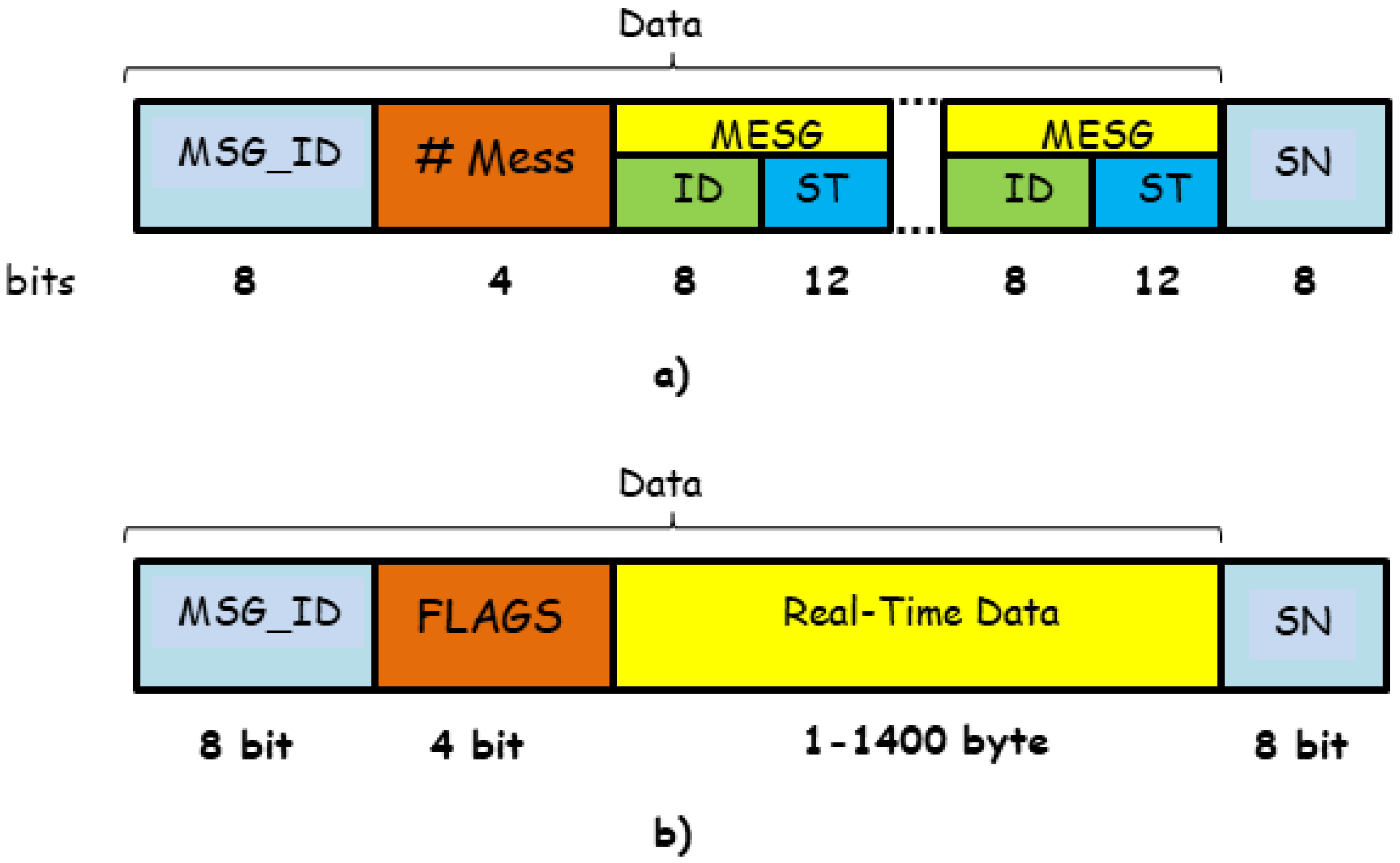
- the NMLV layer supports the spatial redundancy [12] and end systems has to send the message on two output interfaces and to number the messages so that the receiving End System (ES) is able to recognize two copies of a same message; for this reason, a Sequence Number (SN) field is inserted in the NMLV Protocol Data Unit (PDU);
- the NMLV layer defines the scheduling instants for the messages so as to exploit the filtering operation of the switches and allowing for the parallel sending of messages that have no common links on their path connecting the source and destination ESs; that leads to an increase in the bandwidth use.
4.1.3. Scheduling Functionality
4.2. Network Operation Mode
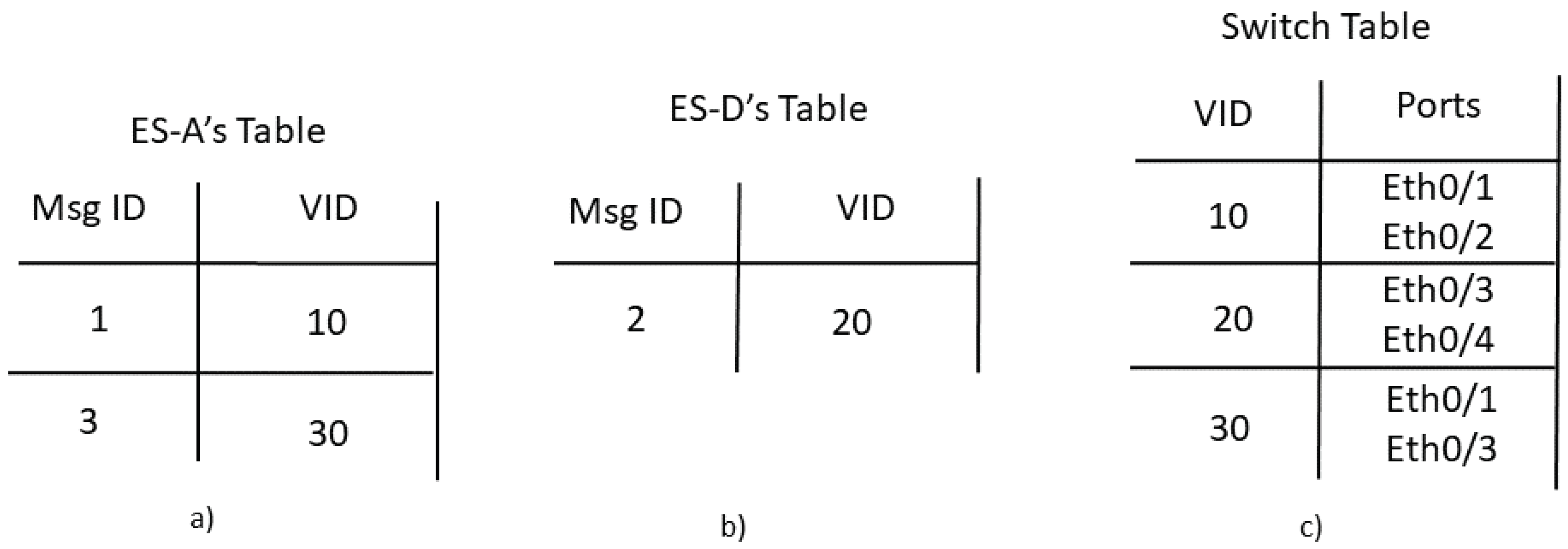
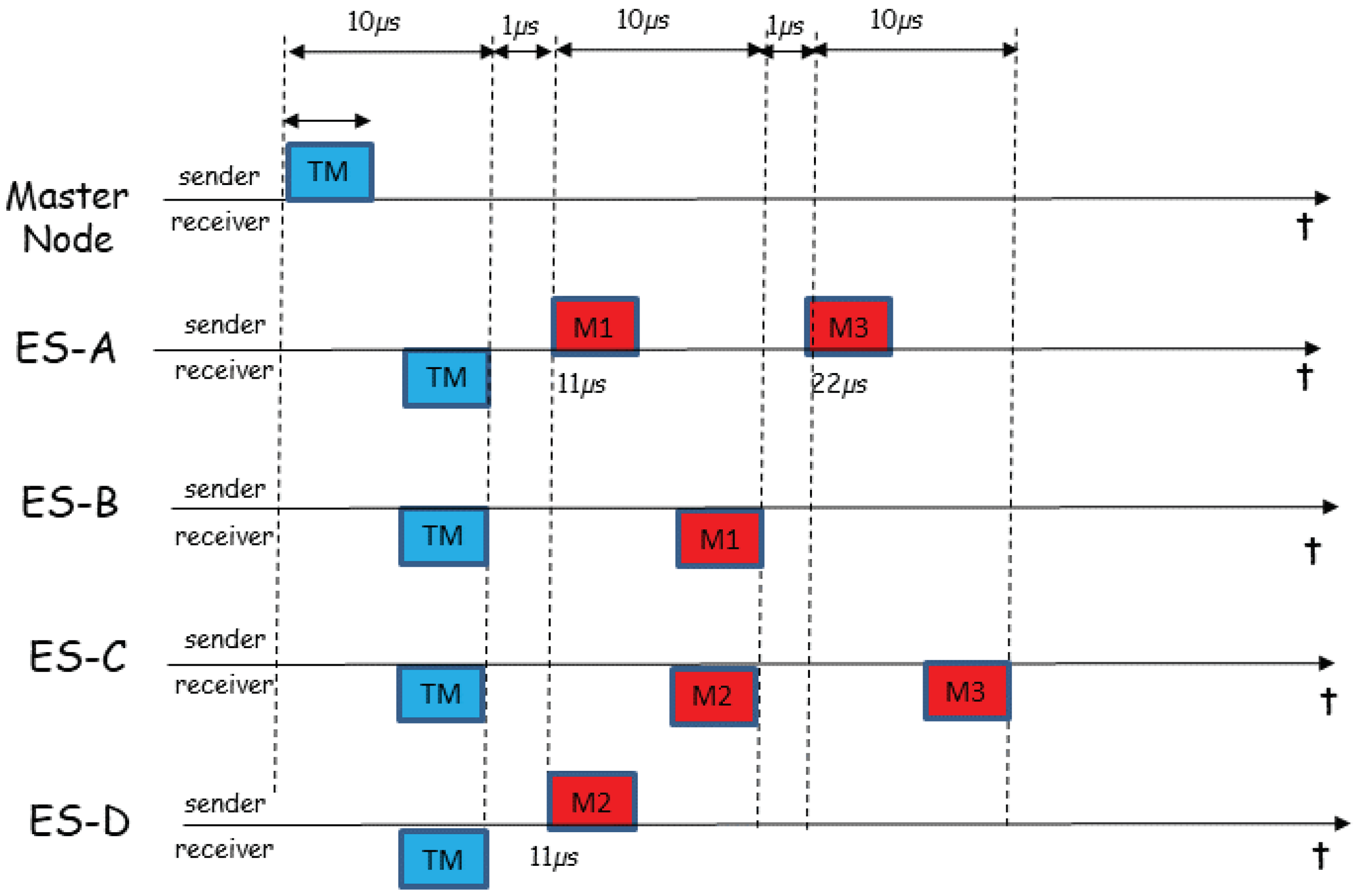
- The master ES applies the NMLV scheduling algorithm and determines the sending instants of the messages M1, M2 and M3; the application of the algorithm may lead to the scenario reported in Figure 7 where the message scheduling instants that avoid contention on the network links may be μs, μs and μs;
- The master ES sends the TM, enveloped in an 802.1Q frame, to all ESs in the network; the TM is shown in Figure 8; it provides information on the sending time of the three messages M1, M2 and M3;
- The ES-A sends in the instants μs and μs the messages M1 and M3 respectively, while the ES-B sends in the instant μs the message M2; the messages M1, M2 and M2 are carried in 802.1Q frames with VID equal to 10, 20 and 30 respectively.
5. Heuristic for Message Scheduling
- : EC duration time;
- P: number of message types, each one characterized by a certain periodicity;
- : period of the i-th type messages expressed in terms of number of ECs; we assume that the values are ordered in increasing order ;
- Q: Multiple Common Minimum of the values ;
- : set of messages of period and with offset i; that is to say that the messages of the set have to be sent in the ECs ;
- : network path in which the message m has to be routed; is composed by a set of network links;
- : ES emitting the message m.
- : transmission end instant of the last message sent by the ES S; this variable is updated every time in which the heuristic decides for the scheduling of a message emitted by the ES S;
- : set of messages that have already been scheduled and use the network link L;
- : higher time instant in which the message r has been completely received by the destination ESs.
| Algorithm 1Heuristic for Message Scheduling |
|
6. Numerical Results
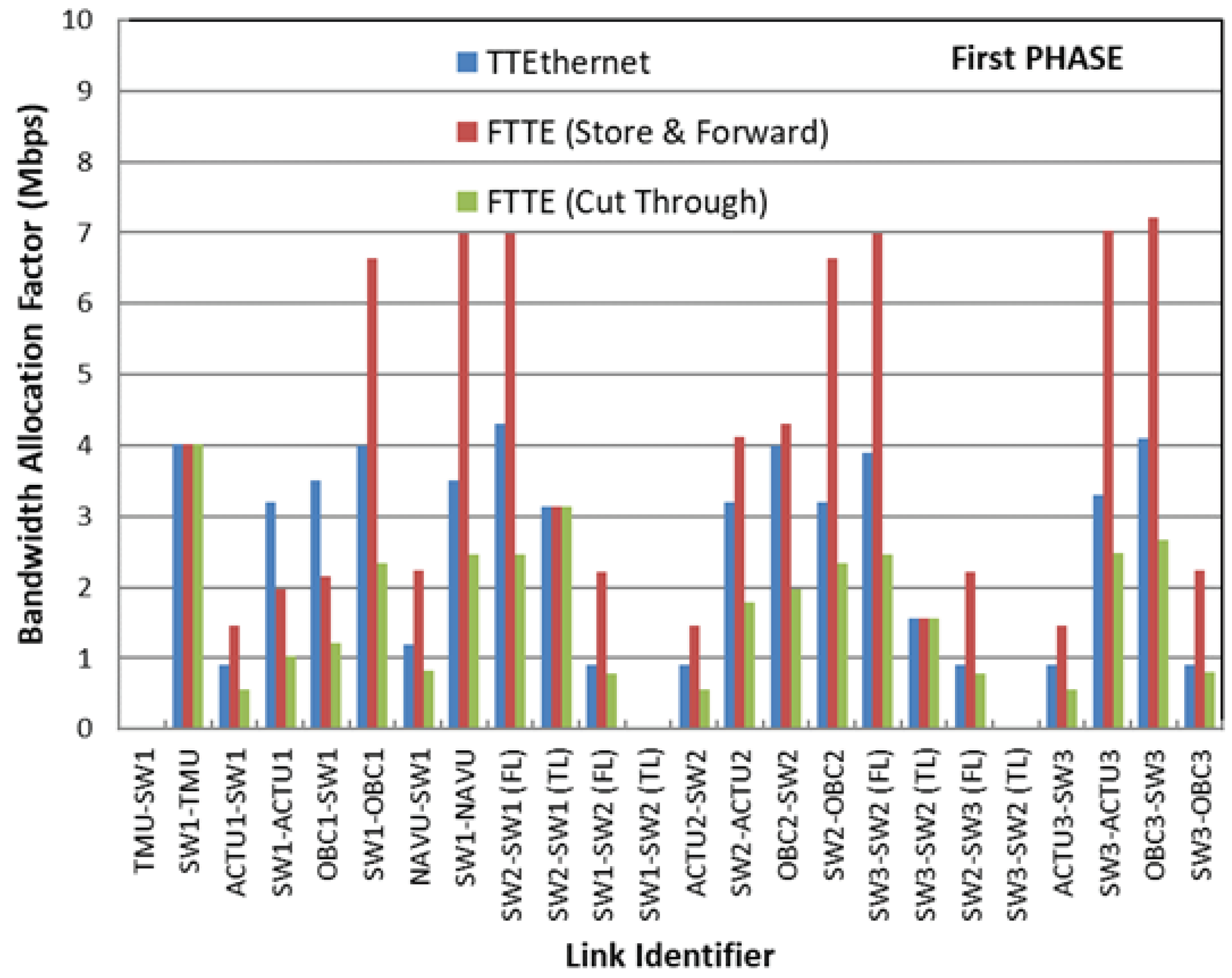
- a FTTE-based solution with the use of store and forward traditional Ethernet switches and when the scheduling heuristic of Section 5 is applied;
- a FTTE-based solution with the use of cut-through Ethernet switches and when the scheduling heuristic of Section 5 is applied; the cut-through solution allows for the minimization of the switch forward delay because the frame can be forwarded not just when the frame header is read;
- a TTEthernet-based solution [12] with the application of a scheduling heuristic similar to the one illustrated in Section 5 by taking into account that the TTEthernet switch allows the introduction of offset times [12] to solve the bandwidth contentions in the network links; obviously this solution is bandwidth effectiveness but its disadvantage is the higher cost considering that a TTEthernet switch can cost up to 40 times the cost of a traditional Ethernet switch.
7. Experimental Test-Bed
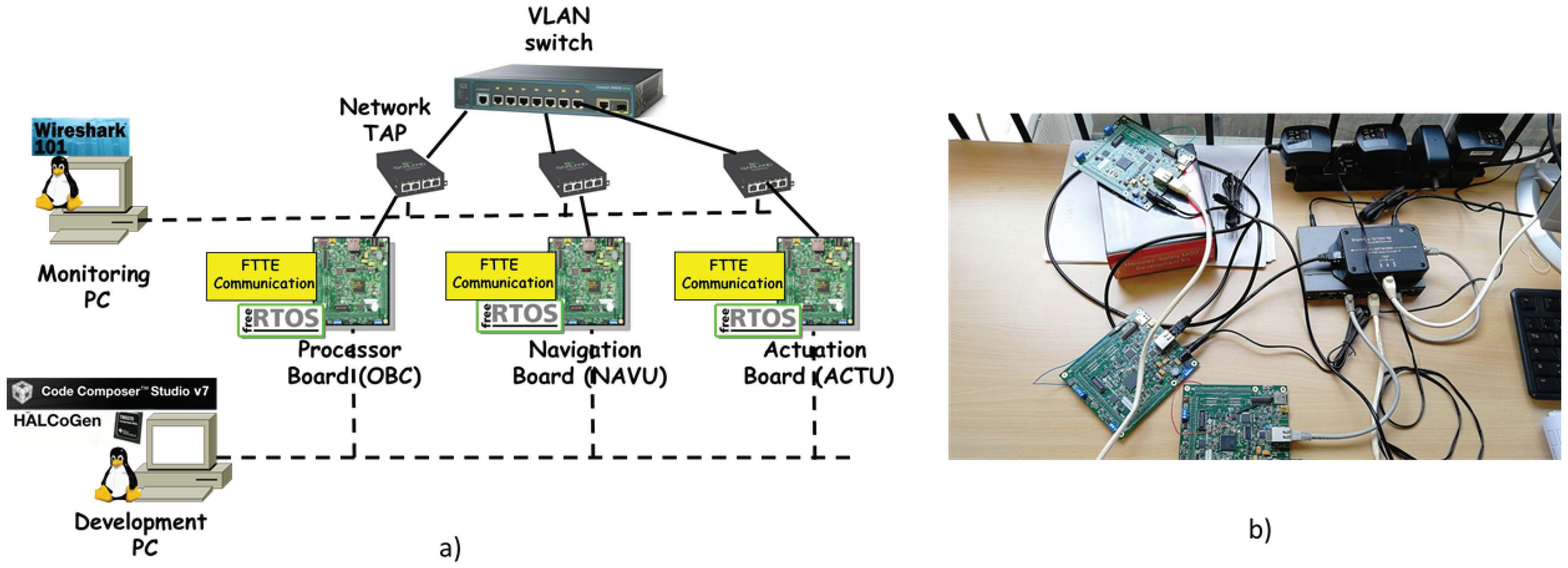
7.1. Demonstrator Hardware/Software
- Three Hercules TMS570 MCU Development Kits. They emulate an OBC, a NAVU and an ACTU respectively; the development board includes an on-board XDS100v2 JTAG emulator, access to connectivity peripherals and access to all other peripheral pins; the kits also include a DC power supply, cables, software environment, demo software and code examples;
- Ethernet Switch. It is based on COTS technology and implements VLAN;
- Network Monitoring PC. It is a PC connected to the same Ethernet network as the units under test by means of network tap and in order to spy on the traffic using Wireshark. The test support software will be mainly composed by GNC and telemetry traffic generator and software for the and frame delivery time and loss measurement in order to verify the correctness of the network operation mode. Some test configurations will be defined in Section 7.2;
- Development PC. It is a PC containing the Software Development Environment (SDE); it is used to code, build, run and debug software on the target platforms.
- FreeRTOS Operating System [23]. The Operating System shall be FreeRTOS executed on the top of Hercules board. FreeRTOS is a real-time operating system kernel for embedded devices that has been ported to about 35 microcontrollers. FreeRTOS kernel itself consists of only three C files. To make the code readable, easy to port, and maintainable, it is written mostly in C, but there are a few assembly functions included. FreeRTOS provides methods for multiple threads or tasks, mutexes, semaphores and software timers. A tick-less mode is provided for low power applications. Thread priorities are supported.
- HALCoGen [24]. It is an application that represents the Hardware Abstraction Layer Code Generator of the Hercules board. HALCoGen provides a graphical user interface that allows the user configuring peripherals, interrupts, clocks, and other microcontroller parameters. Once the device is configured, the user can generate peripheral initialization and driver code, which can be imported into Code Composer Studio. It is important to underline that HALCoGen includes support for FreeRTOS. Indeed, the configuration generated with Halcogen allows completely setting the Hercules board, also taking on the role that is usually played by the Firmware.
- Code Composer Studio [25]. It is an integrated development environment (IDE) that supports development of applications on Texas Instruments microcontrollers and embedded processors. It is based on Eclipse and comprises a suite of tools used to develop and debug embedded applications. It includes an optimizing C/C++ compiler, source code editor, project build environment, debugger, profiler, and many other features. Code Composer Studio communicates with the board for programming and debug using USB XDS100v2 JTAG.
7.2. Tests Description and Results
- NMLV_TM is the Time Triggered Message that coordinates the messages transmission so as to avoid any bandwidth contention; its length depends on the number of messages transmitted in the EC in which NMLV_TM is sent;
- ACTU_C_EV is the message sent from the OBC to the ACTU to switch on/off the Electro-Valves (EV); we assume that the Real_Time field length (Figure 4) of the message equals 8 bit with possibility to switch on/off up to eight EVs;
- ACTU_C_TVC is the message sent from the OBC to the ACTU to pilot the Electro-Mechanical-Actuator (EMA) of the TVCs; we assume that the Real_Time field length (Figure 4) of the message equals 9 bytes: one flag byte and a couple of 4 bytes, each one reporting a float that express in mm the displacement of an EMA;
- NAVU_R_data is the message sent from the NAVU to the OBC to provide the estimation of altitude, position and velocity of the NMLV by the navigation function; we assume that the Real_Time field length (Figure 4) of the message equals 72 bytes.
- Test-A: the network tap of Figure 13 is inserted between the Processor Board and the Ethernet switch and the following messages are collected: NMLV_TM, ACTU_C_EV, ACTU_C_TVC (emitted by the OBC) and NAVU_R_data (received by the OBC);
- Test-B: the network tap of Figure 13 is inserted between the Navigation Board and the Ethernet switch and the following messages are collected: NMLV_TM (received by the NAVU) and NAVU_R_data (emitted by the NAVU);
- Test-C: the network tap of Figure 13 is inserted between the Actuation Board and the Ethernet switch and the following messages are collected: NMLV_TM, ACTU_C_EV, ACTU_C_TVC (emitted by the OBC).
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wekerle, T.; Filho, J.B.P.; da Costa, L.E.V.L.; Trabasso, L.G. Status and Trends of Smallsats and their Launch Vehicles: An Up-to-date Review. J. Aerosp. Technol. Manag. 2017, 3, 269–286. [Google Scholar] [CrossRef]
- Wu, K.; Jiang, J.; Hu, M. Intelligent fault-tolerant 1553B bus system based on adaptive learning. In Proceedings of the 2011 IEEE third International Conference on Communication Software and Networks (ICCSN), Xi’an, China, 27–29 May 2011; pp. 378–381. [Google Scholar]
- Accettura, A.; Balduccini, M.; Carducci, F.; De Lillis, A.; D’Aversa, E. VEGA: The History of an European Success. In Proceedings of the 2012 IEEE First AESS European Conference on Satellite Telecommunications (ESTEL), Rome, Italy, 2–5 October 2012. [Google Scholar]
- Sandic, M.; Teslic, N.; Velikic, Y. Bandwidth utilization in deterministic networks. In Proceedings of the 2016 Zooming Innovation in Consumer Electronics International Conference (ZINC), Novi Sad, Serbia, 1–2 July 2016. [Google Scholar]
- Nguyen, N.T.; Leu, M.C.; Liu, X.F. RTEthernet: Real-time communication for manufacturing cyberphysical systems. Trans. Emerg. Telecommun. Technol. 2018, 29, e3433. [Google Scholar] [CrossRef]
- IEEE802.3-2005, IEEE Standard for Ethernet. 2005. Available online: https://standards.ieee.org/about/get/802/802.3.html (accessed on 10 July 2018).
- Decotignie, J.D. The many faces of Industrial Ethernet. IEEE Ind. Electron. Maga. 2009, 3, 8–19. [Google Scholar] [CrossRef]
- ARINC 644 Part 7, Aircraft Data Network Part 7 Avionics Full Duplex Switched Ethernet (AFDX) Network. 2007. Available online: http://standards.globalspec.com/std/204622/arinc-664-p7 (accessed on 10 July 2018).
- SAE AS6802, Time-Triggered Ethernet. 2011. Available online: http://standards.sae.org/as6802/ (accessed on 10 July 2018).
- Steiner, W.; Bauer, G.; Hall, B.; Paulitsch, B. Triggered Ethernet: TTEthernet; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Eramo, V.; Lavacca, F.G.; Listanti, M.; Caporossi, S. Performance Evaluation of TTEthernet-based Architectures for the VEGA Launcher. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018. [Google Scholar]
- Eramo, V.; Lavacca, F.G.; Listanti, M.; Caporossi, S. TTEthernet: A Networking Technology for the support of Real-Time Services in Launcher Networks. IEEE Aerosp. Electron. Syst. Mag. 2018. [Google Scholar] [CrossRef]
- Pedreiras, P.; Gai, P.; Almeida, L.; Almeida, G. FTT-Ethernet: A flexible real-time communication protocol that supports dynamic QoS management on Ethernet-based system. IEEE Trans. Ind. Inf. 2005, 1, 162–172. [Google Scholar] [CrossRef]
- Derasevic, S.; Barranco, M.; Proenza, J. Designing fault-diagnosis and reintegration to prevent node redundancy attrition in highly reliable control systems based on FTT-Ethernet. In Proceedings of the 2016 IEEE World Conference on Factory Communication Systems (WFCS), Aveiro, Portugal, 3–6 May 2016; pp. 1–14. [Google Scholar]
- Decotignie, J.D. Ethernet-Based Real-Time and Industrial Communications. Proc. IEEE 2005, 93, 1102–1117. [Google Scholar] [CrossRef] [Green Version]
- Haverty, M. MIL-STD 1553—A standard for data communications. Commun. Broadcast. 1986, 10, 29–33. [Google Scholar]
- IEEE Std 802.1AS-2011—IEEE Standard for Local and Metropolitan Area Networks—Timing and Synchronization for Time-Sensitive Applications in Bridged Local Area Networks. Available online: https://standards.ieee.org/findstds/standard/802.1AS-2011.html (accessed on 10 July 2018).
- Song, M.; Yang-Scharlotta, J.Y.; Ashtijou, M.; Mojarradi, M. Evaluation of Commercial-Off-The-Shelf (COTS) Electronics for Extreme Cold Environments. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018. [Google Scholar]
- IEEE8021.Q, IEEE Standard for Local and Metropolitan Area Networks Bridges and Bridged Networks. 2014. Available online: https://ieeexplore.ieee.org/browse/standards/get-program/page/series?id=68 (accessed on 10 July 2018).
- Suethanuwong, E.; Hirunmutrapom, S.I. Searching of Best-effort Messages in TTEthemet Switches during the Timely Blocking Intervals. In Proceedings of the 2016 IEEE RIVF International Conference on Computing and Communication Technologies, Research, Innovation, and Vision for the Future, Hanoi, Vietnam, 7–9 November 2016. [Google Scholar]
- Suethanuwong, E. Message Fragmentation of Event-Triggered Traffic in TTEthernet Systems Using the Timely Block Method. In Proceedings of the 2016 International Conference on Computational Techniques in Information and Communication Technologies (ICCTICT), New Delhi, India, 11–13 March 2016. [Google Scholar]
- Zhou, X.; He, F.; Wang, W. Using network calculus on worst-case latency analysis for TTEthernet in preemption transmission mode. In Proceedings of the 2016 10th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, Australia, 19–21 December 2016. [Google Scholar]
- FreeRTOS Kernel, Software. Available online: https://www.freertos.org/ (accessed on 10 July 2018).
- HALCoGen: Hardware Abstraction Layer Code Generator for Hercules MCUs. Available online: http://www.ti.com/tool/HALCOGEN (accessed on 10 July 2018).
- Code Composer Studio (CCS) Integrated Development Environment (IDE). Available online: http://www.ti.com/tool/CCSTUDIO (accessed on 10 July 2018).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Meaning |
|---|---|
| GNC | Guide, Navigation and Control |
| TMS | Telemetry Subsystem |
| NAVU | Navigation Unit |
| OBC | On Board Computer |
| PDAU | Power Distribution and Actuation Unit |
| TVC | Thrust Vector Control |
| EU | Electronic Control Unit |
| TMU | Telemetry Master Unit |
| GC | Ground Control |
| TRU | Telemetry Remote Unit |
| PL | Payload |
| Message | S | D | Length | Period | Offset | Message | S | D | Length | Period | Offset |
|---|---|---|---|---|---|---|---|---|---|---|---|
| M1 | OBC1 | All | 40 | 1 | 0 | M19 | OBC3 | TMU | 400 | 8 | 2 |
| ACTU1 | |||||||||||
| M2 | OBC1 | TMU | 40 | 1 | 0 | M20 | OBC3 | TMU | 400 | 8 | 6 |
| ACTU2 | |||||||||||
| M3 | OBC2 | TMU | 40 | 1 | 0 | M21 | NAVU | TMU | 128 | 8 | 2 |
| ACTU3 | |||||||||||
| M4 | OBC3 | TMU | 40 | 1 | 0 | M22 | ACTU1 | TMU | 128 | 8 | 4 |
| ACTU1 | |||||||||||
| M5 | OBC1 | TMU | 40 | 8 | 3 | M23 | ACTU2 | TMU | 128 | 8 | 4 |
| ACTU2 | |||||||||||
| M6 | OBC2 | TMU | 40 | 8 | 3 | M24 | ACTU3 | TMU | 128 | 8 | 4 |
| ACTU3 | ACTU1 | ||||||||||
| M7 | OBC3 | TMU | 40 | 8 | 3 | M25 | OBC1 | TMU | 40 | 1 | 0 |
| OBC1 | ACTU1 | ||||||||||
| M8 | OBC2 | TMU | 64 | 4 | 1 | M26 | OBC1 | TMU | 40 | 1 | 0 |
| OBC3 | |||||||||||
| OBC1 | ACTU1 | ||||||||||
| M9 | ACTU1 | TMU | 40 | 8 | 5 | M27 | OBC1 | TMU | 40 | 1 | 0 |
| OBC2 | ACTU2 | ||||||||||
| M10 | ACTU2 | TMU | 40 | 8 | 5 | M28 | OBC2 | TMU | 40 | 1 | 0 |
| OBC3 | ACTU2 | ||||||||||
| M11 | ACTU3 | TMU | 40 | 8 | 5 | M29 | OBC2 | TMU | 40 | 1 | 0 |
| ACTU1 | OBC1 | ||||||||||
| M12 | OBC1 | NAVU | 40 | 1 | 0 | M30 | OBC2 | OBC3 | 400 | 1 | 0 |
| TMU | TMU | ||||||||||
| ACTU2 | ACTU2 | ||||||||||
| M13 | OBC2 | NAVU | 40 | 1 | 0 | M31 | OBC2 | TMU | 40 | 1 | 0 |
| TMU | |||||||||||
| ACTU3 | ACTU3 | ||||||||||
| M14 | OBC3 | NAVU | 40 | 1 | 0 | M32 | OBC3 | TMU | 40 | 1 | 0 |
| TMU | |||||||||||
| ACTU3 | |||||||||||
| M15 | OBC1 | TMU | 400 | 8 | 0 | M33 | OBC3 | TMU | 40 | 1 | 0 |
| OBC1 | |||||||||||
| M16 | OBC1 | TMU | 400 | 8 | 4 | M34 | OBC3 | TMU | 400 | 1 | 0 |
| ACTU3 | |||||||||||
| M17 | OBC2 | TMU | 400 | 8 | 1 | M35 | OBC3 | TMU | 40 | 1 | 0 |
| M18 | OBC2 | TMU | 400 | 8 | 5 |
| Message Name | VLAN ID | MSG_ID | Source ES | Destination ES | Period (EC) | Offset (EC) | Scheduling Time (ms) |
|---|---|---|---|---|---|---|---|
| NMLV_TM | 10 | 1 | OBC | ACTB,NAVB | 1 | 0 | 0 |
| ACTU_C_EV | 50 | 2 | OBC | ACTU | 1 | 0 | 1 |
| ACTU_C_TVC | 50 | 5 | OBC | ACTU | 8 | 2 | 3 |
| NAVU_R_data | 170 | 8 | NAVU | OBC | 4 | 1 | 1 |
| Message | Test-A Mean (ms) | Test-A Standard Deviation (ms) | Test-B Mean (ms) | Test-B Standard Deviation (ms) | Test-C Mean (ms) | Test-C Standard Deviation (ms) |
|---|---|---|---|---|---|---|
| NMLV_TM | 4.9996 | 0.0337 | 4.9996 | 0.0262 | 4.9996 | 0.0227 |
| ACTU_C_EV | 4.9987 | 0.0644 | — | — | 4.9987 | 0.0537 |
| ACTU_C_TVC | 39.9903 | 0.1075 | — | — | 39.9918 | 0.4143 |
| NAVU_R_data | 19.9989 | 0.4747 | 19.9996 | 0.1558 | — | — |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eramo, V.; Lavacca, F.G.; Valente, F.; Pisculli, A.; Caporossi, S. Simulation and Experimental Evaluation of a Flexible Time Triggered Ethernet Architecture Applied in Satellite Nano/Micro Launchers. Aerospace 2018, 5, 84. https://doi.org/10.3390/aerospace5030084
Eramo V, Lavacca FG, Valente F, Pisculli A, Caporossi S. Simulation and Experimental Evaluation of a Flexible Time Triggered Ethernet Architecture Applied in Satellite Nano/Micro Launchers. Aerospace. 2018; 5(3):84. https://doi.org/10.3390/aerospace5030084
Chicago/Turabian StyleEramo, Vincenzo, Francesco G. Lavacca, Francesco Valente, Andrea Pisculli, and Stefano Caporossi. 2018. "Simulation and Experimental Evaluation of a Flexible Time Triggered Ethernet Architecture Applied in Satellite Nano/Micro Launchers" Aerospace 5, no. 3: 84. https://doi.org/10.3390/aerospace5030084