
Improved Nonfragile Sampled-Data Event-Triggered Control for the Exponential Synchronization of Delayed Complex Dynamical Networks

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
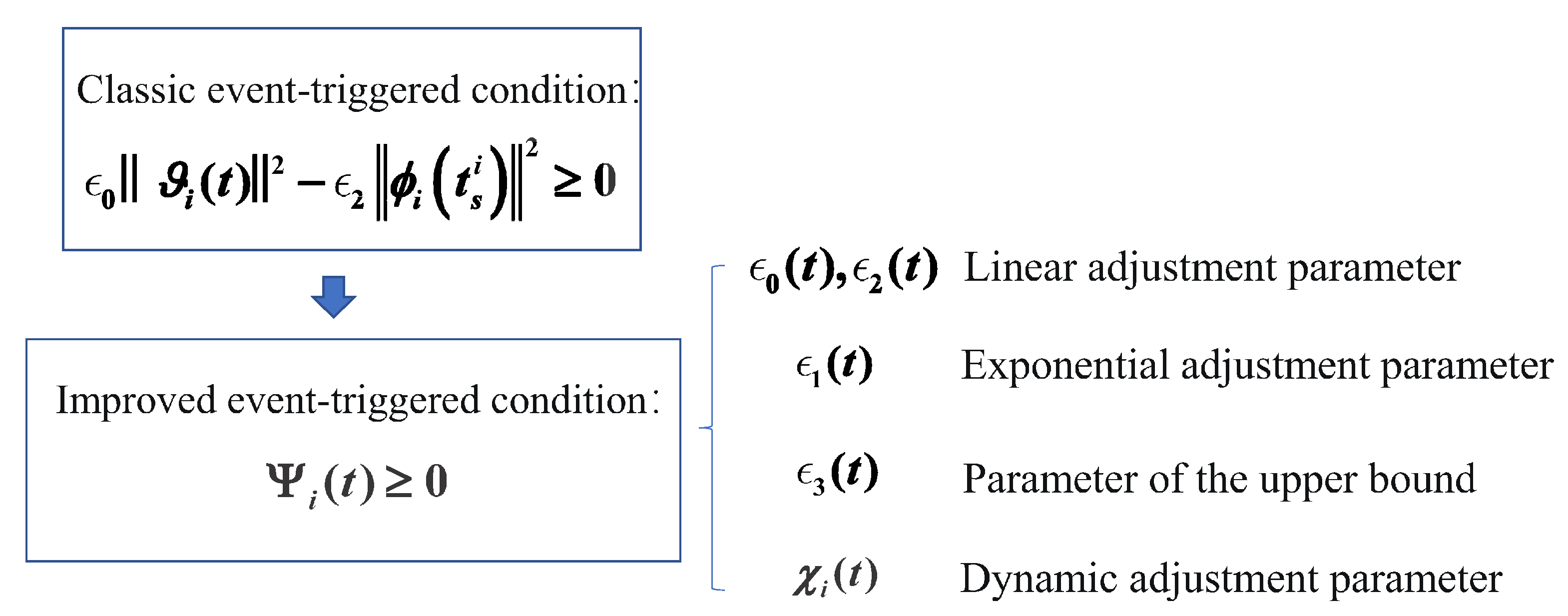
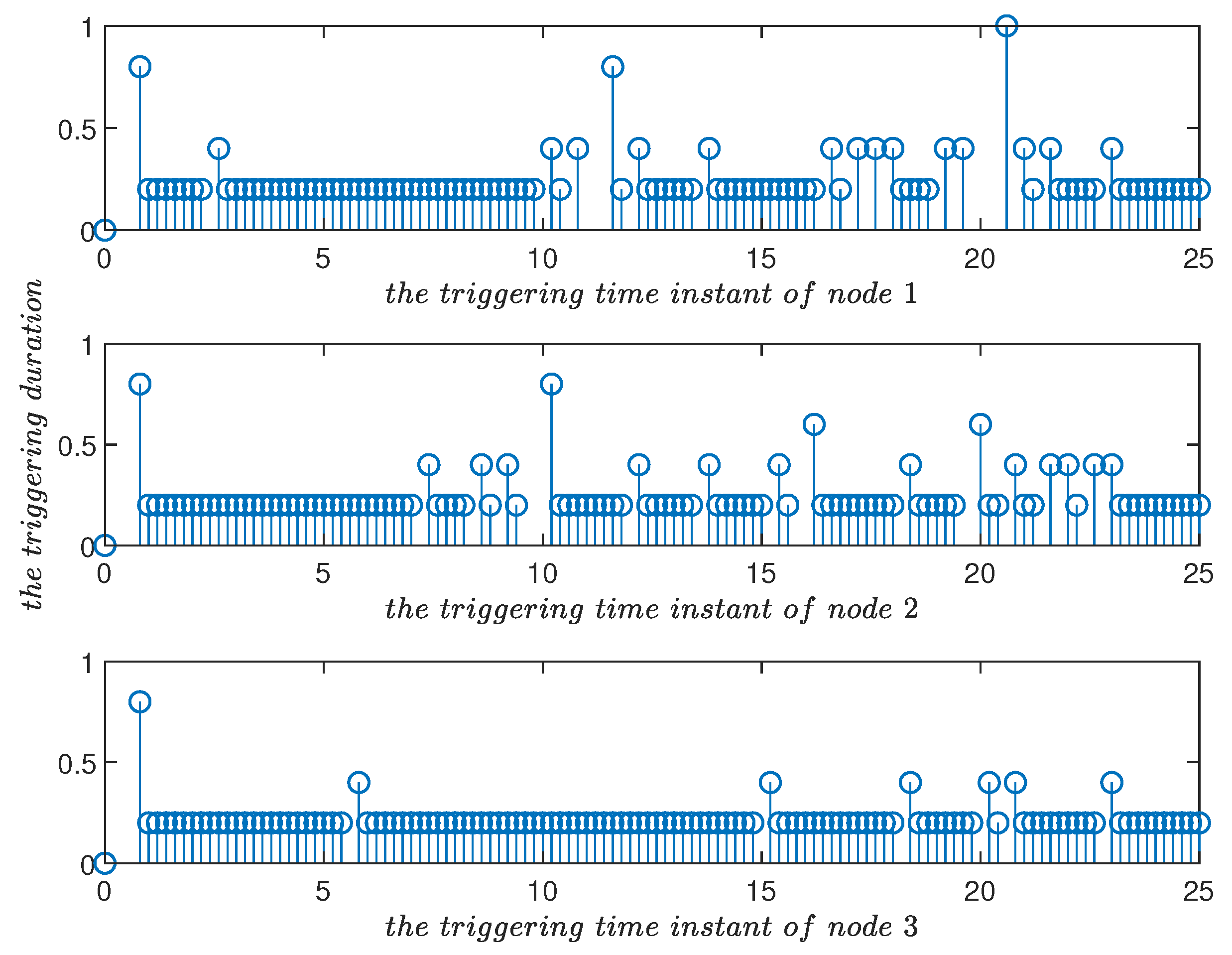
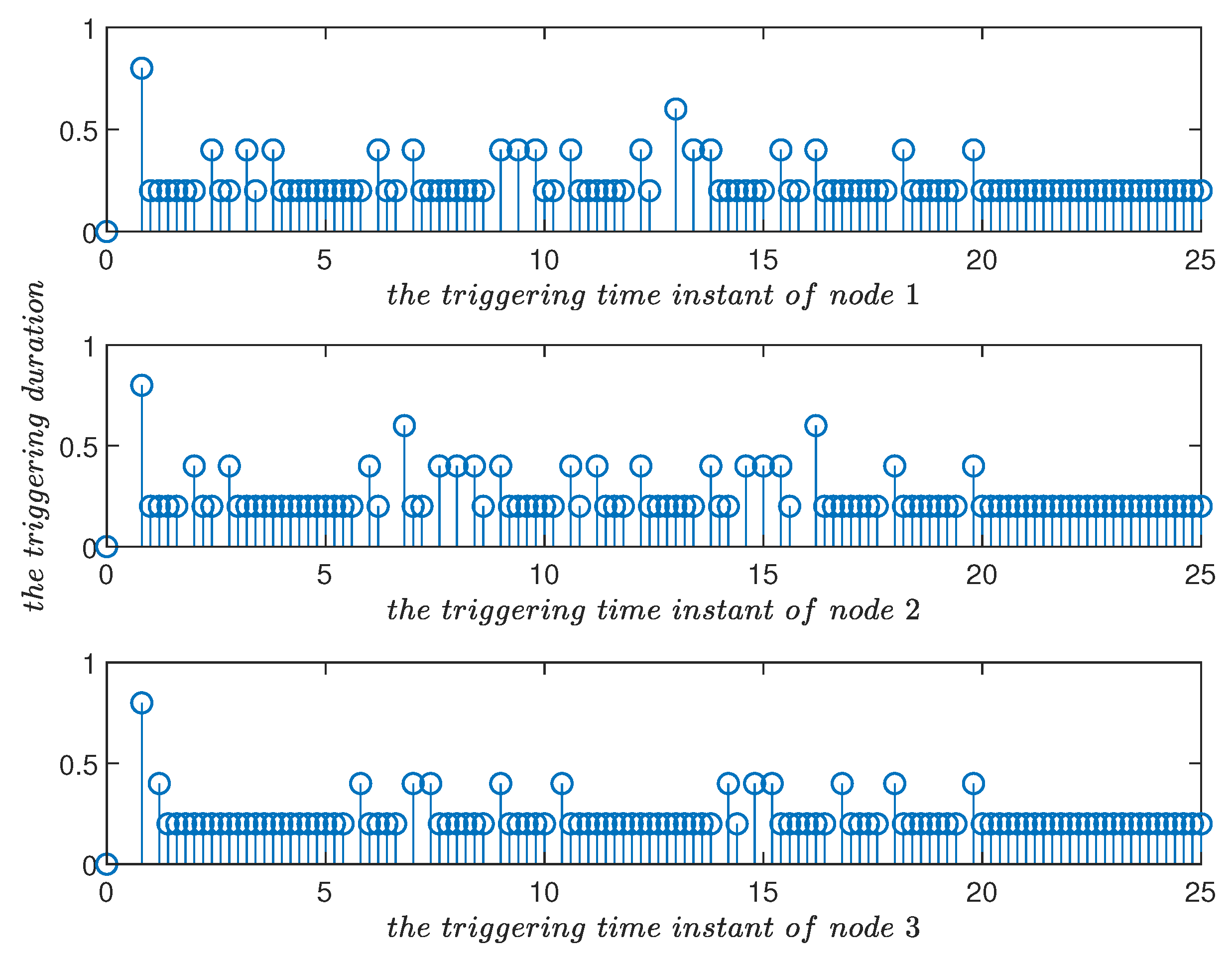
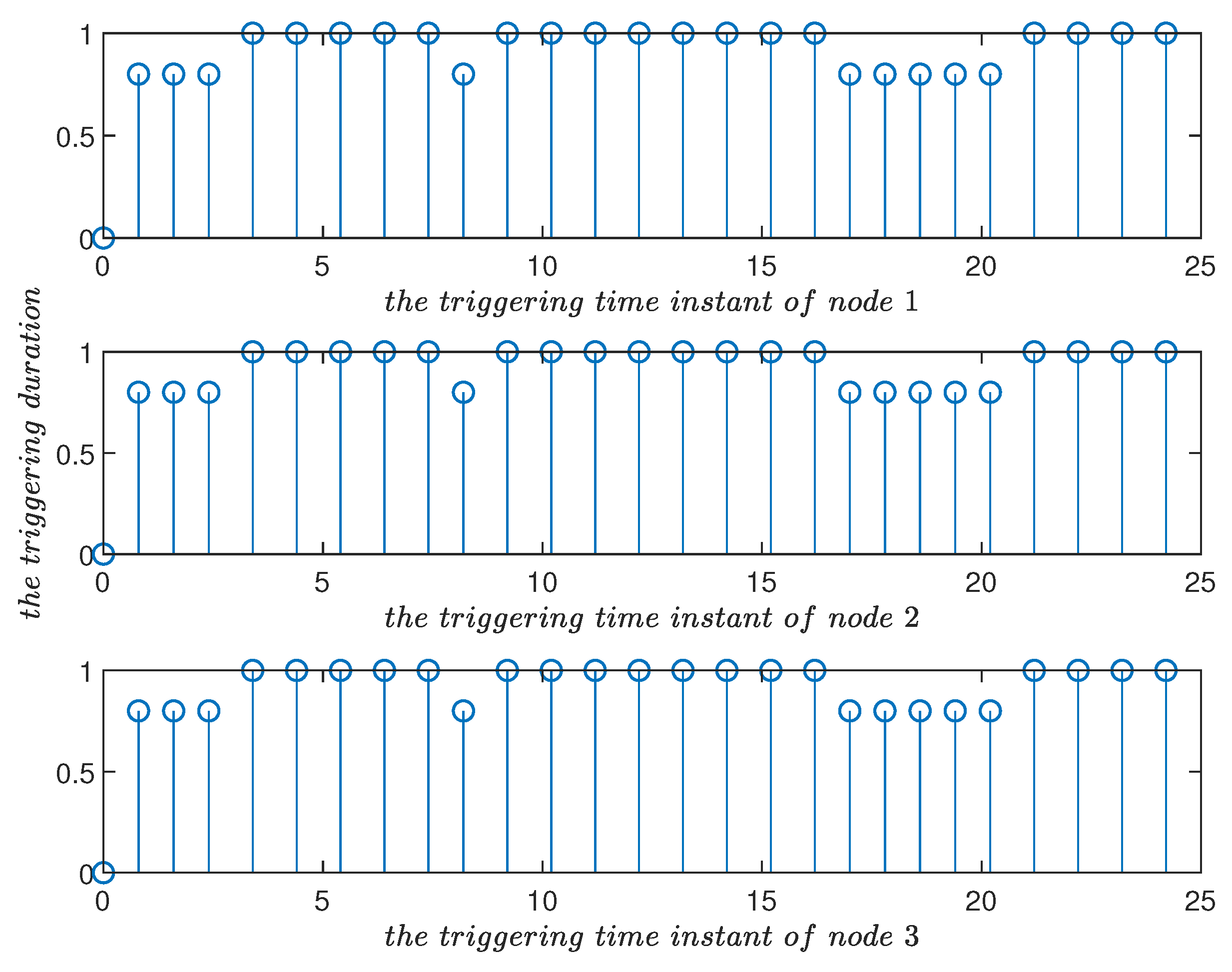
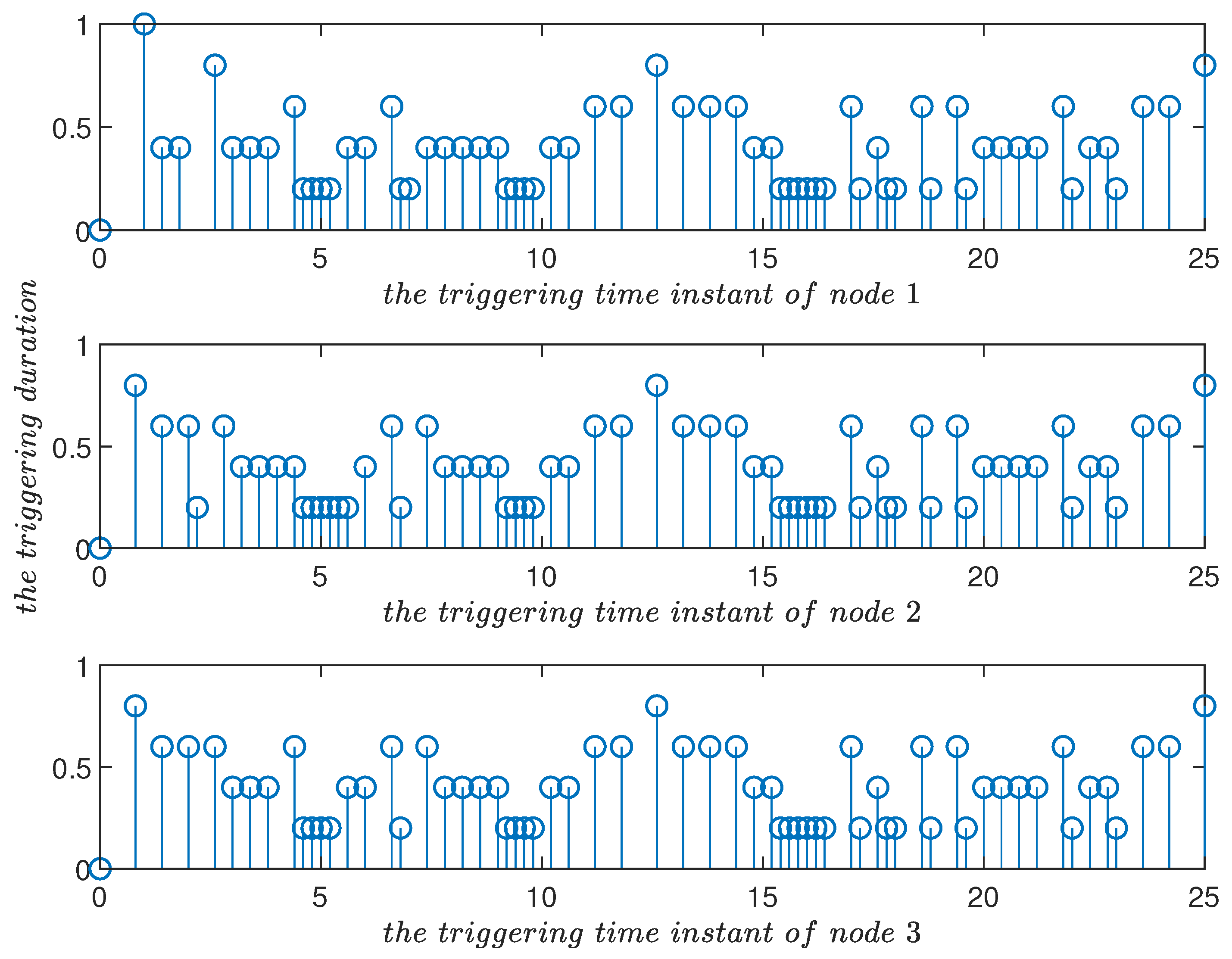
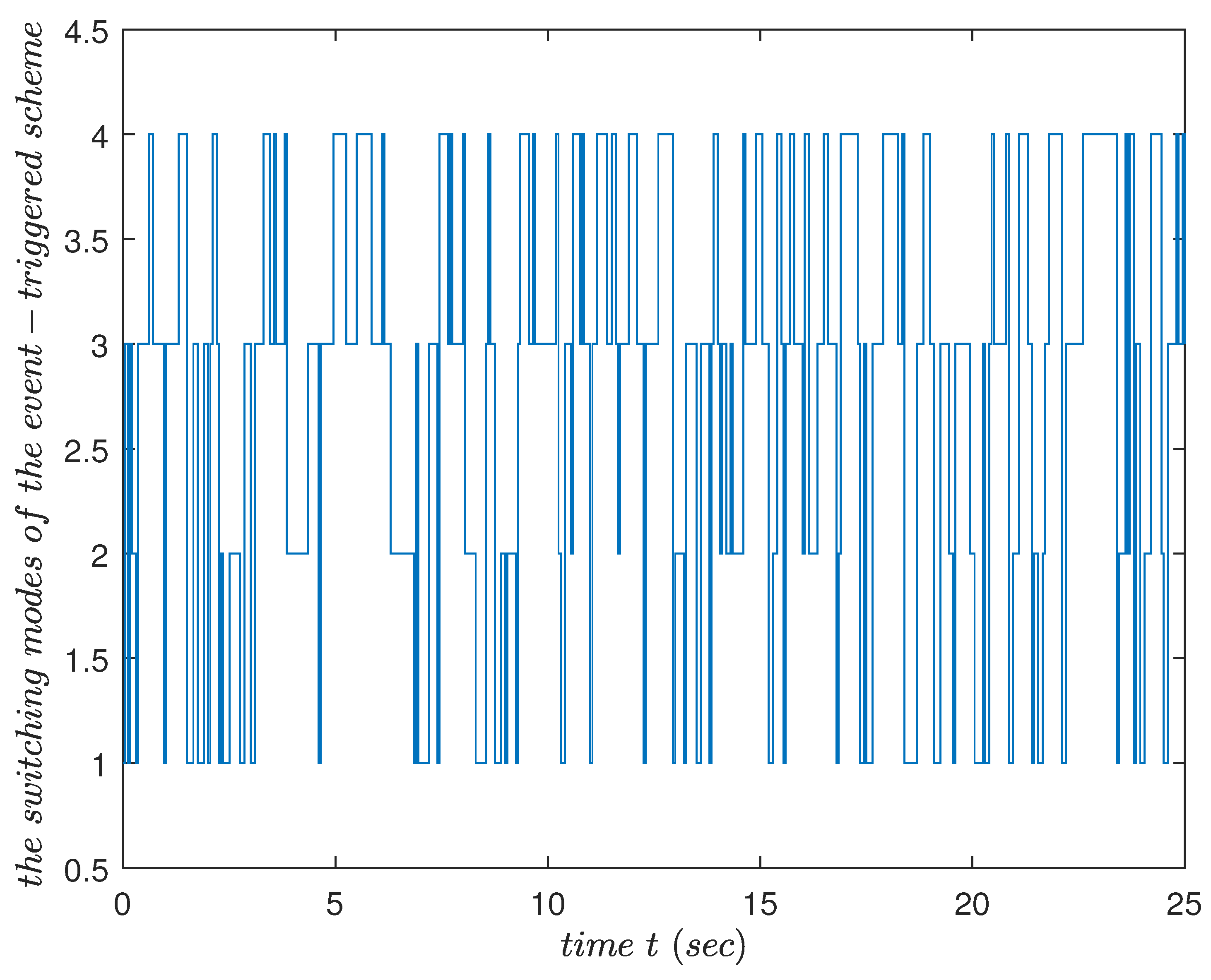
- The piecewise function was applied to the triggering condition in Remark 1, which can realize the flexibility of time according to the actual demand of different time periods. For the randomness of different triggering scenarios, Markov switching is applied to allow for the triggering condition to better adapt to possible scenarios, which is described in detail in Remark 1. The dynamic adjustment of the triggering is also realized in the event-triggered scheme described in Remark 3. Their results are given in the examples.
- The triggering time instants of different nodes were sequenced into the control time series. This rearrangement was well-handled and facilitated performance analysis of the system. Under the designed event-triggered control scheme, the nonfragile exponential synchronization criteria of complex networks are obtained.
2. Preliminaries
3. Main Results
4. Simulation Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Boccaletti, S.; Latora, V.; Moreno, Y.; Chavez, M.; Hwang, D.U. Complex networks: Structure and dynamics. Phys. Rep. 2006, 424, 175–308. [Google Scholar] [CrossRef]
- Battiston, F.; Amico, E.; Barrat, A.; Bianconi, G.; Arruda, G.F.D.; Franceschiello, B.; Iacopini, I.; Kéfi, S.; Latora, V.; Moreno, Y.; et al. The physics of higher-order interactions in complex systems. Nat. Phys. 2021, 17, 1093–1098. [Google Scholar] [CrossRef]
- Pecora, L.; Carroll, T. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef] [PubMed]
- Sakthivel, R.; Kwon, O.M.; Park, M.J.; Choi, S.G.; Sakthivel, R. Robust asynchronous filtering for discrete-time T¨CS fuzzy complex dynamical networks against deception attacks. IEEE Trans. Fuzzy Syst. 2021, 30, 3257–3269. [Google Scholar] [CrossRef]
- Fujisaka, H.; Xamada, T. Stability theory of synchronized motion in coupled-oscillator systems. Prog. Theor. Phys. 1983, 69, 32–47. [Google Scholar] [CrossRef]
- Zamart, C.; Botmart, T.; Weera, W.; Charoensin, S. New delay-dependent conditions for finite-time extended dissipativity based non-fragile feedback control for neural networks with mixed interval time-varying delays. Math. Comput. Simul. 2022, 201, 684–713. [Google Scholar] [CrossRef]
- Liu, B.; Sun, Z.; Luo, Y.; Zhong, Y. Uniform synchronization for chaotic dynamical systems via event-triggered impulsive control. Phys. A Stat. Mech. Appl. 2019, 531, 121725. [Google Scholar] [CrossRef]
- Tan, X.; Cao, J.; Rutkowski, L. Distributed dynamic self-triggered control for uncertain complex networks with Markov switching topologies and random time-varying delay. IEEE Trans. Netw. Sci. Eng. 2019, 7, 1111–1120. [Google Scholar] [CrossRef]
- Nan, L.; Zhang, Y.; Hu, J.; Nie, Z. Synchronization for general complex dynamical networks with sampled-data. Neurocomputing 2011, 74, 805–811. [Google Scholar]
- Liu, Y.; Guo, B.Z.; Ju, H.P.; Lee, S.M. Nonfragile exponential synchronization of delayed complex dynamical networks with memory sampled-data control. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 118–128. [Google Scholar] [CrossRef]
- Wu, Z.G.; Xu, Y.; Pan, Y.J.; Shi, P.; Wang, Q. Event-triggered pinning control for consensus of multiagent systems with quantized information. IEEE Trans. Syst. Man Cybernet. Syst. 2018, 48, 1929–1938. [Google Scholar] [CrossRef]
- Ding, L.; Han, Q.-L.; Ge, X.; Zhang, X.-M. An overview of recent advances in event-triggered consensus of multiagent systems. IEEE Trans. Cybernet. 2017, 48, 1110–1123. [Google Scholar] [CrossRef] [PubMed]
- Ding, S.; Wang, Z. Event-triggered synchronization of discrete-time neural networks: A switching approach. Neural Netw. 2020, 125, 31–40. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Li, Y.; Li, W. Almost surely exponential synchronization of complex dynamical networks under aperiodically intermittent discrete observations noise. IEEE Trans. Cybernet. 2022, 52, 2663–2674. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Chen, X.; Feng, J.; Man, K.K.; Austin, F. Mean-square exponential synchronization of Markovian switching stochastic complex networks with time-varying delays by pinning control. Abst. Appl. Anal. 2012, 6, 298095. [Google Scholar] [CrossRef]
- Yang, Y.; Cao, J. Exponential synchronization of the complex dynamical networks with a coupling delay and impulsive effects. Nonlinear Anal. Real World Appl. 2010, 11, 1650–1659. [Google Scholar] [CrossRef]
- Wu, Z.; Shi, P.; Su, H.; Chu, J. Sampled-data exponential synchronization of complex dynamical networks with time-varying coupling delay. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1177–1187. [Google Scholar]
- Hongsri, A.; Botmart, T.; Weera, W.; Junsawang, P. New delay-dependent synchronization criteria of complex dynamical networks With time-varying coupling delay based on sampled-data control via new integral inequality. IEEE Access 2021, 9, 64958–64971. [Google Scholar] [CrossRef]
- Wang, X.; Lemmon, M.D. Event-triggered broadcasting across distributed networked control systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3139–3144. [Google Scholar]
- Zhang, X.M.; Han, Q.L.; Zhang, B.L. An overview and deep investigation on sampled-data-based event-triggered control and filtering for networked systems. IEEE Trans. Indust. Informat. 2017, 13, 4–16. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Frazzoli, E.; Johansson, K.H. Distributed event-triggered control for multi-agent systems. IEEE Trans. Automat. Control 2011, 57, 1291–1297. [Google Scholar] [CrossRef]
- Dong, Y.; Tian, E.; Han, Q.L. A delay system method to design of event-triggered control of networked control systems. In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 1668–1673. [Google Scholar]
- Michael, H.; Feng, L.; George, M.; Stefan, R. Analysis of Zeno behaviors in hybrid systems. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 2379–2384. [Google Scholar]
- Borgers, D.P.; Heemels, W. Event-separation properties of event-triggered control systems. IEEE Trans. Automat. Control 2014, 59, 2644–2656. [Google Scholar] [CrossRef]
- Liu, X.; Su, X.; Shi, P.; Shen, C.; Peng, Y. Event-triggered sliding mode control of nonlinear dynamic systems. Automatica 2020, 112, 108738. [Google Scholar] [CrossRef]
- Zhu, Q. Stabilization of stochastic nonlinear delay systems with exogenous disturbances and the event-triggered feedback control. IEEE Trans. Automat. Control 2019, 64, 3764–3771. [Google Scholar] [CrossRef]
- Deng, C.; Che, W.-W.; Wu, Z.-G. dynamic periodic event-triggered approach to consensus of heterogeneous linear multiagent systems with time-varying communication delays. IEEE Trans. Cybernet. 2020, 51, 1812–1821. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Park, J.H.; Zhao, X.; Karimi, H.R.; Cao, J. Quantized nonstationary filtering of networked Markov switching rsnss: A multiple hierarchical structure strategy. IEEE Trans. Automat. Control 2019, 65, 4816–4823. [Google Scholar] [CrossRef]
- Cheng, J.; Park, J.H.; Cao, J.; Qi, W. Hidden Markov model-based nonfragile state estimation of switched neural network with probabilistic quantized outputs. IEEE Trans. Cybernet. 2019, 50, 1900–1909. [Google Scholar] [CrossRef]
- Wu, Z.; Park, J.; Su, H.; Song, B.; Chu, J. Exponential synchronization for complex dynamical networks with sampled-data. J. Frankl. Inst. 2012, 349, 2735–2749. [Google Scholar] [CrossRef]
- Kwon, O.M.; Park, M.J.; Park, J.H.; Lee, S.M.; Cha, E.J. Improved results on stability of linear systems with time-varying delays via wirtinger-based integral inequality. J. Frankl. Inst. 2014, 351, 5386–5398. [Google Scholar] [CrossRef]
- Liu, K.; Fridman, E. Wirtinger¡¯s inequality and Lyapunov-based sampled-data stabilization. Automatica 2012, 48, 102–108. [Google Scholar] [CrossRef]
- Park, P.; Ko, J.W.; Jeong, C. Reciprocally convex approach to stability of systems with time-varying delays. Automatica 2011, 47, 235–238. [Google Scholar] [CrossRef]
- Makkiyappan, M.; Sakthivel, N.; Cao, J. Stochastic sampled-data control for synchronization of complex dynamical networks with control packet loss and additive time-varying delays. Neural Netw. 2015, 66, 46–63. [Google Scholar] [CrossRef] [PubMed]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Cao, J.; Shi, K.; Tang, Y.; Zhong, S.; Alsaadi, F.E. Improved Nonfragile Sampled-Data Event-Triggered Control for the Exponential Synchronization of Delayed Complex Dynamical Networks. Mathematics 2022, 10, 3504. https://doi.org/10.3390/math10193504
Zhao C, Cao J, Shi K, Tang Y, Zhong S, Alsaadi FE. Improved Nonfragile Sampled-Data Event-Triggered Control for the Exponential Synchronization of Delayed Complex Dynamical Networks. Mathematics. 2022; 10(19):3504. https://doi.org/10.3390/math10193504
Chicago/Turabian StyleZhao, Can, Jinde Cao, Kaibo Shi, Yiqian Tang, Shouming Zhong, and Fawaz E. Alsaadi. 2022. "Improved Nonfragile Sampled-Data Event-Triggered Control for the Exponential Synchronization of Delayed Complex Dynamical Networks" Mathematics 10, no. 19: 3504. https://doi.org/10.3390/math10193504