
Fixed/Predefined-Time Synchronization of Complex-Valued Stochastic BAM Neural Networks with Stabilizing and Destabilizing Impulse
College of Mathematics and System Sciences, Xinjiang University, Urumqi 830046, China
*
Author to whom correspondence should be addressed.
Mathematics 2022, 10(22), 4384; https://doi.org/10.3390/math10224384
Submission received: 5 October 2022
/
Revised: 9 November 2022
/
Accepted: 14 November 2022
/
Published: 21 November 2022
(This article belongs to the Section Dynamical Systems)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This article is mainly concerned with the fixed-time and predefined-time synchronization problem for a type of complex-valued BAM neural networks with stochastic perturbations and impulse effect. First, some previous fixed-time stability results on nonlinear impulsive systems in which stabilizing and destabilizing impulses were separately analyzed are extended to a general case in which the stabilizing and destabilizing impulses can be handled simultaneously. Additionally, using the same logic, a new predefined-time stability lemma for stochastic nonlinear systems with a general impulsive effect is obtained by using the inequality technique. Then, based on these novel results, two novel controllers are implemented to derive some simple fixed/predefined-time synchronization criteria for the considered complex-valued impulsive BAM neural networks with stochastic perturbations using the non-separation method. Finally, two numerical examples are given to demonstrate the feasibility of the obtained results.
Keywords:
stochastic perturbation; impulse effect; complex-valued BAM neural network; fixed-time synchronization; predefined-time synchronizationMSC:
34A37; 34D06; 34D201. Introduction
The BAM neural network was initially introduced in 1987 [1], and consists of two layers of neurons, each of which is linked to all the neurons in the other layer, while the neurons in the same layer do not have any connection to each other. Due to the powerful associative memory and information association ability of BAM neural network, it has been widely studied by scholars in recent years [2,3,4], who have applied them to many key areas, such as pattern recognition, secure communication, and automatic control engineering [5,6,7,8], etc. For example, Ref. [3] investigated decentralized event-triggered stability analysis of neutral-type BAM neural networks with Markovian jump parameters and mixed time varying delays. Ref. [5] investigated the fixed-time (FXT) synchronization of complex-valued memristive BAM neural networks with leakage delays and its application to image encryption and decryption problem. Ref. [6] concerned the asymptotic anti-synchronization issue of memristive BAM neural networks, and then applied their results to a network security communication study. In Ref. [7], the authors investigated the finite-time (FNT) projection synchronization problem of memristive BAM neural networks together with application to image encryption.
The recent decades witnessed the wide investigation of various types of synchronization issue of neural networks with or without stochastic fluctuations including asymptotic synchronization, exponential synchronization, general decay synchronization, FNT synchronization, FXT synchronization, and predefined-time (PDT) synchronization. Among them, FNT synchronization has attracted a great concern because it can achieve the synchronization aim in a FNT and has good robustness and anti-interference properties [9,10,11]. However, the settling time (ST, which can be seen as the minimum upper bound of system state to reach zero) of FNT synchronization is extensively relevant to the initial values of system, and thus it is unable to exert its superiority when the initial values of a system are unknown or can not be obtained, which undoubtedly limits the specific application of the FNT control techniques. In order to cope with this difficult issue, Polyakov [12] introduced FXT stability concept, in which its ST does not depend on the initial values of the system but only relevant on the system parameters and the controller gains. On this basis, a great number of scholars have studied FXT synchronization of various types of nonlinear systems [13,14,15,16,17].
It is worth noting that, however, the FXT synchronization also has some limitations, such as its ST still being dependent on the system parameters, and it can therefore not be specified in advance. However, in some special engineering applications, such as DC Microgrid [18], secure communication [19], etc., it is required that the system states achieve the synchronization aim within a pre-defined time. Thus, another type of synchronization, PDT synchronization, has been introduced and well studied in the past few years [17]. The one advantage of PDT synchronization is that its ST can be an arbitrary number and can be scheduled in advance.
In addition, with the continuous development of neural network theory, it has been found that real-valued neural networks have some limitations when solving many practical application problems, for example XOR [20], reaction-convection-diffusion systems [21,22], etc. Thus, as a extension of real-valued neural network, the complex-valued neural network has been adopted and investigated in depth since they have a more complex structure and richer properties, which can solve the above problems more easily and effectively. Currently, two methods have been introduced and used to analyze the dynamical behaviors of complex-valued neural network: one is the separation method, in which the real part and imaginary part of network are divided into two real-valued systems and then the dynamics of the these systems are studied separately [23,24,25]. The separation method is feasible, but there are some disadvantages, such as, after separation, the dimensionality of the system becomes two-fold and there is a need to design controllers for the real and imaginary parts of the system separately, which greatly increases the computational effort and control cost. The other is the non-separated approach, i.e., discussing the dynamical behavior of the original complex-valued neural network directly on the complex domain [17,26]. Compared to the separation method, the non-separation method is much simpler, less computationally intensive, and easier to implement. Based on this, this paper uses a non-separated approach to discuss the synchronization of the considered complex-valued BAM neural network.
In addition, it is worth noting that in neural network systems, synaptic transmission can be seen as a noisy process of random fluctuation from the release of neurotransmitters and other probabilistic causes [27]. That is, there might exist stochastic disturbances in neural network systems. Currently, there are many excellent studies on the synchronization of neural networks with stochastic perturbations [28,29,30,31,32,33,34,35,36]. Such as, in Refs. [35,36], the FXT/PDT synchronization for a class of fuzzy neural networks with stochastic perturbations and the PDT synchronization of time-delayed BAM neural networks with stochastic fluctuations are discussed, respectively. However, in some actual situations, such as in the opening and closing of the operation buttons, the change of frequency or sudden noise may cause an unexpected change in the system state, i.e., the impulse effect [33,37,38,39]. Therefore, investigating the synchronization of impulsive neural networks with stochastic fluctuations is of great theoretical significance. So far, however, there are few results on the FXT/PDT synchronization of complex-valued neural networks with both of these two effects. Especially, there are very seldom works on the PDT synchronization of these kinds of networks due to the lack of available PDT stability results for impulsive systems, not to mention the PDT stability of nonlinear systems with both impulsive effects and stochastic perturbations.
Inspired by the above analysis, in this paper, we focused on the FXT/PDT synchronization issue of a class of complex-valued BAM neural networks with both impulsive effects and stochastic perturbations. The main contributions of our paper are mainly reflected in the following four aspects. (1) Some new unified FXT/PDT stability results for nonlinear impulsive systems with stabilizing and destabilizing impulses are introduced via employing the inequality technique. (2) Some simple FXT/PDT synchronization criteria for complex-valued BAM neural networks with stochastic perturbations and general impulse effects are derived via designing novel controllers. (3) The ST estimation obtained in the current study is more accurate compared to some early published works [15,40,41]. (4) Unlike the traditional separation method [5,25], this paper uses a non-separation method to deal with the FXT/PDT synchronization of considered complex-valued BAM neural networks, which is more simple analytically and can effectively reduce the computational and control burden.
Notation 1.
In this article, the set of natural numbers is denoted by N, the set of all real numbers is denoted by R, stands to the set of non-negative numbers, is the set consisting of all dimensional real vectors. C is the set of complex numbers. denotes the dimensional complex vector-valued space. For any , is the conjugate of λ. and represent separately the real and imaginary parts of λ. . denotes a complete filtered probability space, in which the filtration satisfies the usual condition that contains all P-null sets in . denotes the mathematical expectation corresponding to the probability measure P. The sign function of λ is . denotes the Euclidean norm, that is , .
2. System Description and Preliminary Knowledge
Consider the following complex-valued BAM neural network with stochastic perturbations
where , , , positive integers n and m denote the number of neurons from the neural domains and , respectively. and stand for the state variables of the ith neuron of neural domain and the jth neuron of neural domain , respectively. and represent the self-inhibition rate of the ith neuron in the neural domain and the jth neuron in the neural domain , respectively. and are the synaptic connection weights. and denote the activation functions. and stand for the external inputs. and denote the noise intensity function. denotes a Brown motion given on the probability space . and are positive constants. For all , , , , denote the impulse jumps at the impulse moments . The impulse sequence satisfies and . The initial conditions of system (1) are and .
The response system of the above drive system is described as follows:
where and denote the state variables of the response system. and are the controllers that will be designed in the next section. The initial values of system (2) are and .
The following are our assumptions about complex-valued activation functions and stochastic noise intensity functions.
Assumption A1.
The complex-valued activation functions and satisfy the Lipschitz condition, that is for (), there are scalers and such that
where and .
Assumption A2.
For any complex-valued constant z, there exist positive constants and such that and satisfy
Definition 1
([42]). If there exists a positive integer and a constant , such that
where is the number of impulses of impulse sequence in time interval , then the impulse sequence is said to have an average impulse interval .
Consider the following complex-valued stochastic nonlinear system
where is the state vector of the system. and are the continuous function given in advance and satisfy , . denotes the Brown motion. is a continuous function. For all , denotes the impulse jump at the impulse moment , and , . The impulsive sequence satisfies and .
Definition 2
([43]). Let be the set of all non-negative functions on its partial derivative for t is continuous and second-order partial derivatives for ψ and exist, then for each , its operator is defined as
Definition 3
([44]). The zero solution of system (4) is called to be FXT stable in probability, if solution which corresponds to initial condition satisfies
- (1)
- For any initial condition , there exists a ST function such that .
- (2)
- Stability in probability: for every pair of and , there exists a such that , whenever .
- (3)
- The mathematical expectation of is bounded by a constant such that
Definition 4
Lemma 1
Lemma 2
Lemma 3
(i) , for any ,
(ii)
where , and λ are positive scalers, and are constants, then the origin for system (4) is FXT stable in probability, and the ST is estimated by
where , , .
Proof.
Remark 1.
In fact, in a recent study [41], the authors investigated the FXT stable issue of deterministic nonlinear system with impulsive effects by using the well-known comparison principle of impulsive differential inequality and some analysis methods. However, due to the limitation of the applied analysis method in Ref. [41], it discusses the impulses separately as stabilizing and destabilizing impulsives, which was done in Theorems 1 and 2 in Ref. [41]. In Lemma 3, however, we have combined the results of these two Theorems by introducing a novel term , which reduces the mathematical expression of ST. In addition, Lemma 3 consider the stochastic perturbations besides impulsive effects. From this aspect, the FXT stable result concluded by Lemma 3 is more general and has a better applicability.
Lemma 4.
If there exists Lyapunov function such that:
(i) , for any , .
(ii)
where , is an arbitrary number given in advance. , , , positive constants μ, , δ and γ are given in Lemma 3, then the zero solution of the system (4) is PDT stable in probability.
Proof.
It follows from Lemma 3 that the zero solution of the system (4) under conditions (i) and (ii) are FXT stable in probability and its ST satisfies
where . According to the inequality , we have
The proof is achieved. □
Remark 2.
In some circumstance where the initial conditions of the system are not accessible, the PDT synchronization has better application prospects than FXT synchronization due to its ST being independent of the initial values and system parameters. Presently, some novel results have been introduced on PDT synchronization of nonlinear systems without the impulsive effect [19,46]. However, research results on PDT synchronization of nonlinear systems with impulses are still very few due to the inconvenience caused by impulsive gains, in particularly, there are almost no studies on PDT synchronization of nonlinear systems with both impulses and stochastic perturbations. Here, we derived the PDT stability criteria for these kinds of systems by applying the novel inequality technique.
3. Main Results
3.1. Fixed Time Synchronization
In this subsection, the FXT stable given in Lemma 4 will be applied to discuss FXT synchronization of complex-valued impulsive BAM neural networks with stochastic perturbations. To make the systems (1) and (2) achieve FXT synchronization, we only need to prove that the error system (3) is stable in FXT. To do this, the following control protocol is developed
where , , , , , are positive real numbers, and . Before giving the main theorem, for convenience, we also denote
Theorem 1.
Proof.
Constructing the Lyapunov function as
where
Calculating the along the trajectory of the system (3), yields
From Lemma 1 and Assumption 1, we can get
In view of Assumption 2, we have
According to Lemma 2, one has
By combining above inequalities, we obtain
Similarly, for it is not difficult to get
Therefore, finally we have
When ,
Thus, in view of Equations (15) and (16), we obtain from Lemma 3 that the error system (3) can achieve FXT stable in probability with ST , so that systems (1) and (2) achieve FXT synchronization in probability, and its ST obtained as
The proof is finished. □
In Theorem 1 we consider the FXT synchronization of complex-valued BAM neural networks with both impulsive and stochastic effects. Since there is no stochastic perturbations in original drive-response systems, they become
At this time, by denoting
then we have a following result from the Theorem 1.
Corollary 1.
Suppose that Assumption 1 and the inequality is satisfied, then, under the controller (7), the system (17) and (18) will achieve FXT stabilization with a ST
where , and are defined above.
Corollary 2.
Remark 3.
During the synchronization analysis of complex-valued NNs, there are some works that divided the original complex-valued networks into real and imaginary networks and then investigated their synchronization performance separately [19,21,24,47]. Undoubtedly, this will double the dimension of the system and increase the control burden. In this article, we investigated the FXT synchronization of the considered stochastic complex-valued stochastic NNs with general impulses using the non-separation method. Compared to the separation method used in Refs. [19,21,24,47], it makes the theocratical analysis much easier and helps to simplify the control process.
3.2. Predefined Time Synchronization
In this subsection, we will investigate the PDT synchronization of drive-response networks (1) and (2) by designing a new controller given as follows
where , , is PDT given in advance, , , . , , , are positive scalars, and .
Theorem 2.
Proof.
Define the Lyapunov function as
where
Calculating for along the trajectory of the system (3), we get
In view of Lemma 1 and Assumption 1, we obtain
In addition by Assumption 2, we have
According to Lemma 2, one has
Similarly, for , it is not difficult to get
Therefore, we have
When
Corollary 3.
Corollary 4.
Remark 4.
Currently there are many works on the PDT synchronization of various types of chaotic systems with or without stochastic perturbations such as [19,26,35]. However, due to the lack of available PDT stability results for nonlinear impulsive systems, there are few works on the PDT synchronization of chaotic nonlinear systems with impulsive effects, not to mention those with both impulsive effects and stochastic perturbations. In this paper, for the first time, we have considered the PDT synchronization of complex-valued stochastic BAM neural networks with a general type of impulsive effects, where the impulsive gains can be stabilizing or destabilizing. Since, compared to FXT synchronization, the ST of in PDT synchronization can be given in advance on the basis of application requirement and it has nothing to do with the initial vales and intrinsic system parameters, the PDT synchronization studied in Section 3.2 has a broader application background.
4. Numerical Examples and Simulations
Now we verify the FXT and PDT synchronization criteria obtained in the above section by giving two relevant numerical examples.
Example 1.
For , consider the following complex-valued impulse BAM neural network with stochastic perturbations:
its related parameters are chosen as , , , .
By setting the impulsive moments as for and impulsive gains and , then the MATLAB simulations of system (31) with initial conditions , and are shown in Figure 1, which indicates that system (31) has a chaotic attractor.
Now, we introduce the response system of system (31) as follows
where the corresponding parameter is the same as in system (31).
By simple computation we can obtain that , , . Thus, the Assumptions 1 and 2 are satisfied. To simplify the demonstration, we first reselect the impulsive moments as for , and then choose the control parameters as , , , , , , we can calculate that and . This means that all the criteria of Theorem 1 hold true. Therefore, from Theorem 1, drive-response impulsive neural networks (31) and (32) will achieve FXT time synchronization with ST . The time evolution of FXT synchronization errors between systems (31) and (32) are given in Figure 2, where the initial values of system (32) are arbitrarily taken in [−5, 5].
Next we consider the PDT synchronization of systems (31) and (32) under controller (21). By choosing , the condition in Theorem 2 is satisfied, where . Therefore, according to Theorem 2, the drive-response systems (31) and (32) are PDT synchronized in a PDT that is less than and . The time evolution of the PDT synchronization error between the systems (31) and (32) under the PDT controller is shown in Figure 3.
Example 2.
For , consider the following complex-valued impulse BAM neural network with stochastic perturbations:
where , and is a real-valued Brown motion. The other parameters of (33) are chosen as . Figure 4 shows the MATLAB simulations of system (33) with initial values , and , , which indicates that system (33) has a chaotic attractors.
The corresponding slave system is described as
where are defined in system (33). It is not difficult to check that Assumptions 1 and 2 are satisfied with for . In addition, by simple computation, we get , . Choosing and , then the conditions in Theorem 1 are satisfied. Therefore, according to Theorem 1, the master-slave systems (33) and (34) are FXT synchronized within . Figure 5 shows the time changes of the solutions of errors dynamics between (33) and (34) under the controller (7), where the initial values of system (34) are randomly selected in [−8, 8].
Next we consider the PDT synchronization of systems (33) and (34) under controller (21). By choosing , the condition in Theorem 2 is satisfied, where . Therefore, according to Theorem 2, the drive-response systems (31) and (32) are PDT synchronized in a PDT that is less than and . The time evolution of the PDT synchronization error between the systems (33) and (34) under the PDT controller is shown in Figure 6.
5. Conclusions
In this article, we considered the FXT and PDT synchronization issue of a class of complex-valued neural networks with stochastic perturbations and impulsive effects. First, some FXT and PDT stability results are introduced for general complex-valued stochastic nonlinear systems with impulsive effects. Then, based on these developed results, we have derived some novel FXT and PDT synchronization criteria for the considered complex-variable neural networks by designing novel controllers and employing some analysis methods. The introduced controllers are simple and they do not include a linear feedback term , which is used by most of the recent published works on FXT and PDT synchronization studies, Thereby, the control burden is relaxed to some extent. In addition, the feasibility of the theocratical results are demonstrated by giving one numerical example and its numerical simulations. It is worth to mention that the devolved theoretical results of the paper will provide some insights to investigate the more complex types of neural networks with impulsive effects such as Clifford-valued neural networks and quaternion-valued neural networks, etc.
Author Contributions
J.Y., writing, methodology, and visualization. A.A., visualization, review, editing and funding acquisition. H.S., review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Outstanding Youth Program of Xinjiang, China (Grant no. 2022D01E10).
Conflicts of Interest
The authors declare that they have no any competing interests regarding the publication of this article.
References
- Kosko, B. Adaptive bidirectional associative memories. Appl. Opt. 1987, 26, 4947–4960. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.S.; Vadivel, R.; Kwon, O.M. Decentralized event-triggered stability analysis of neutral-type BAM neural networks with Markovian jump parameters and mixed time varying delays. Int. J. Control Autom. Syst. 2018, 16, 983–993. [Google Scholar] [CrossRef]
- Dong, T.; Xiang, W.; Huang, T. Pattern formation in a reaction-diffusion BAM neural network with time delay: (k1, k2) mode Hopf-zero bifurcation case. IEEE Trans. Neural Netw. Learn. Syst. 2021, 3, 15–28. [Google Scholar] [CrossRef]
- Ali, M.S.; Saravanakumar, R.; Cao, J. New passivity criteria for memristor-based neutral-type stochastic BAM neural networks with mixed time-varying delays. Neurocomputing 2016, 171, 1533–1547. [Google Scholar]
- Guo, Y.; Luo, Y.; Wang, W. Fixed-time synchronization of complex-valued memristive BAM neural network and applications in image encryption and decryption. Int. J. Control Autom. Syst. 2020, 18, 462–476. [Google Scholar] [CrossRef]
- Yuan, M.; Wang, W.; Luo, X. Asymptotic anti-synchronization of memristor-based BAM neural networks with probabilistic mixed time-varying delays and its application. Mod. Phys. Lett. Condens. Matter Phys. Stat. Phys. Appl. Phys. 2018, 32, 1850278. [Google Scholar] [CrossRef]
- Wang, W.; Wang, X.; Luo, X. Finite-time projective synchronization of memristor-based BAM neural networks and applications in image encryption. IEEE Access 2018, 6, 56457–56476. [Google Scholar] [CrossRef]
- Nejadgholi, I.; Seyyedsalehi, S.A.; Chattier, S. A chaotic feature extracting BAM and its application in implementing memory search. Neural Process. Lett. 2012, 36, 69–99. [Google Scholar] [CrossRef]
- Abdurahman, A.; Jiang, H.; Teng, Z. Finite-time synchronization for memristor-based neural networks with time-varying delays. Neural Netw. 2015, 69, 20–28. [Google Scholar] [CrossRef]
- Liu, X.; Cao, J.; Yu, W. Nonsmooth finite-time synchronization of switched coupled neural networks. IEEE Trans. Cybern. 2015, 46, 2360–2371. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of homogeneous systems. In Proceedings of the 1997 American Control Conference, Albuquerque, NM, USA, 6 June 1997; IEEE: Piscataway, NJ, USA, 1997; Volume 4, pp. 2513–2514. [Google Scholar]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of Linear Control Systems. IEEE Trans. Autom. Control 2011, 57, 2106–2110. [Google Scholar] [CrossRef]
- Liu, X.; Chen, T. Fixed-time cluster synchronization for complex networks via pinning control. arXiv 2015, arXiv:1509.03350. [Google Scholar]
- Wan, Y.; Cao, J.; Wen, G. Robust fixed-time synchronization of delayed Cohen-Grossberg neural networks. Neural Netw. 2016, 73, 86–94. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Lam, J.; Ho, D.W.C. Fixed-time synchronization of complex networks with impulsive effects via nonchattering control. IEEE Trans. Autom. Control 2017, 62, 5511–5521. [Google Scholar] [CrossRef]
- Jia, H.; Luo, D.; Wang, J.; Shen, H. Fixed-time synchronization for inertial CohenC-Grossberg delayed neural networks: An event-triggered approach. Knowl.-Based Syst. 2022, 250, 109104. [Google Scholar] [CrossRef]
- Pang, M.; Zhang, Z.; Wang, X.; Wang, Z.; Lin, C. Fixed/Preassigned-time synchronization of high-dimension-valued fuzzy neural networks with time-varying delays via nonseparation approach. Knowl.-Based Syst. 2022, 255, 109774. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.W.; Xiao, J.W. Predefined-time secondary control for DC microgrid. IEEE Trans. Ind. Electron. 2021, 69, 13504–13513. [Google Scholar] [CrossRef]
- Li, Q.; Liu, S. Predefined-time vector-polynomial-based synchronization among a group of chaotic systems and its application in secure information transmission. AIMS Math. 2021, 6, 11005–11028. [Google Scholar] [CrossRef]
- Nitta, T. Solving the XOR problem and the detection of symmetry using a single complex-valued neuron. Neural Netw. 2003, 16, 1101–1105. [Google Scholar] [CrossRef]
- Gibbon, J.D.; Mcguinness, M.J. The real and complex Lorenz equations in rotating fluids and lasers. Physical D 1982, 5, 108–122. [Google Scholar] [CrossRef]
- Bolognani, S.; Smyshlyaev, A.; Krstic, M. Adaptive output feedback control for complex-valued reaction-advection-diffusion systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 961–966. [Google Scholar]
- Sun, K.; Zhu, S.; Wei, Y. Finite-time synchronization of memristor-based complex-valued neural networks with time delays. Phys. Lett. A 2019, 383, 2255–2263. [Google Scholar] [CrossRef]
- Ding, X.; Cao, J.; Alsaedi, A. Robust fixed-time synchronization for uncertain complex-valued neural networks with discontinuous activation functions. Neural Netw. 2017, 90, 42–55. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Guo, R.; Liu, X.; Zhong, M.; Lin, C.; Chen, B. Fixed-time synchronization for complex-valued BAM neural networks with time delays. Asian J. Control 2019, 23, 298–314. [Google Scholar] [CrossRef]
- Feng, L.; Yu, J.; Hu, C. Nonseparation method-based finite/fixed-time synchronization of fully complex-valued discontinuous neural networks. IEEE Trans. Cybern. 2021, 51, 3212–3223. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Q.; Cao, J. Stability analysis of Markovian jump stochastic BAM neural networks with impulse control and mixed time delays. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 467–479. [Google Scholar] [PubMed]
- Shi, P.; Zhang, Y.; Agarwal, R.K. Stochastic finite-time state estimation for discrete time-delay neural networks with Markovian jumps. Neurocomputing 2015, 151, 168–174. [Google Scholar] [CrossRef]
- Xu, D.; Liu, Y.; Liu, M. Finite-time synchronization of multi-coupling stochastic fuzzy neural networks with mixed delays via feedback control. Fuzzy Sets Syst. 2021, 411, 85–104. [Google Scholar] [CrossRef]
- Yu, J.; Yu, S.; Li, J. Fixed-time stability theorem of stochastic nonlinear systems. Int. J. Control 2019, 92, 2194–2200. [Google Scholar] [CrossRef]
- Li, L.; Xu, R.; Gan, Q. A switching control for finite-time synchronization of memristor-based BAM neural networks with stochastic disturbances. Nonlin. Anal. Control 2020, 25, 958–979. [Google Scholar] [CrossRef]
- Ren, H.; Peng, Z.; Gu, Y. Fixed-time synchronization of stochastic memristor-based neural networks with adaptive control. Neural Netw. 2020, 130, 165–175. [Google Scholar] [CrossRef]
- Sun, G.; Zhang, Y. Exponential stability of impulsive discrete-time stochastic BAM neural networks with time-varying delay. Neurocomputing 2014, 131, 323–330. [Google Scholar] [CrossRef]
- Gu, H. Mean square exponential stability in high-order stochastic impulsive BAM neural networks with time-varying delays. Neurocomputing 2011, 74, 720–729. [Google Scholar] [CrossRef]
- Abudusaimaiti, M.; Abdurahman, A.; Jiang, H. Fixed/predefined-time synchronization of fuzzy neural networks with stochastic perturbations. Chaos Solitons Fractals 2022, 154, 111596. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, H.; Liu, A. Predefined-time Synchronization of Stochastic Memristor-based Bidirectional Associative Memory Neural Networks with Time-varying Delays. IEEE Trans. Cogn. Dev. Syst. 2021. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; She, K. Pinning impulsive synchronization of complex dynamical networks with various time-varying delay sizes. Nonlin. Anal. Syst. 2017, 26, 307–318. [Google Scholar] [CrossRef]
- Rajchakit, G.; Sriraman, R. Robust passivity and stability analysis of uncertain complex-valued impulsive neural networks with time-varying delays. Neural Process. Lett. 2021, 53, 581–606. [Google Scholar] [CrossRef]
- Hu, H.; Gao, B.; Xu, L. Finite-Time and Fixed-Time Attractiveness for Nonlinear Impulsive Systems. IEEE Trans. Autom. Control. 2021, 67, 5586–5593. [Google Scholar] [CrossRef]
- Li, H.; Li, C.; Huang, T. Fixed-time stability and stabilization of impulsive dynamical systems. J. Frankl. Inst. 2017, 354, 8626–8644. [Google Scholar] [CrossRef]
- Jamal, M.A.; Kumar, R.; Mukhopadhyay, S. Fixed-time stability of dynamical systems with impulsive effects. J. Frankl. Inst. 2022, 359, 3164–3182. [Google Scholar] [CrossRef]
- Lee, L.; Liu, Y.; Liang, J. Finite time stability of nonlinear impulsive systems and its applications in sampled-data systems. ISA Trans. 2015, 57, 172–178. [Google Scholar] [CrossRef]
- Oksendal, B. Stochastic Differential Equations: An Introduction with Applications; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Yin, J.; Khoo, S.; Man, Z. Finite-time stability and instability of stochastic nonlinear systems. Automatica 2011, 47, 2671–2677. [Google Scholar] [CrossRef]
- Hardy, G.H.; Littlewood, J.E.; Plya, G. Inequalities; Cambridge University Press: Cambridge, UK, 1952. [Google Scholar]
- Anguiano-Gijón, C.A.; Muñoz-Vázquez, A.J.; Sxaxnchez-Torres, J.D. On predefined-time synchronisation of chaotic systems. Chaos Solitons Fractals 2019, 122, 172–178. [Google Scholar] [CrossRef]
- Song, Q.; Yan, H.; Zhao, Z. Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects. Neural Netw. 2016, 79, 108–116. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
The chaotic attractor of the real and imaginary parts of system (31).
Figure 1.
The chaotic attractor of the real and imaginary parts of system (31).

Figure 2.
Evaluation of the real and imaginary parts of FXT synchronization errors and .
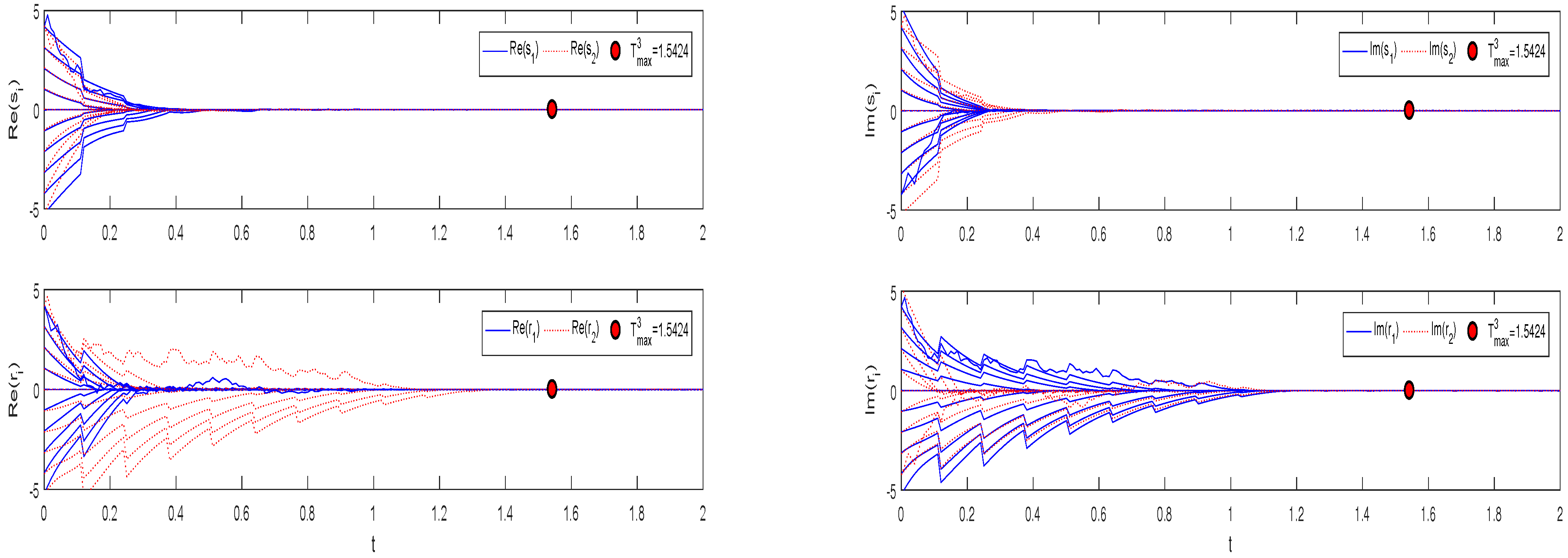
Figure 3.
Evaluation of the real and imaginary parts of PDT synchronization errors and .

Figure 4.
The chaotic attractor of the real and imaginary parts of system (33).
Figure 4.
The chaotic attractor of the real and imaginary parts of system (33).
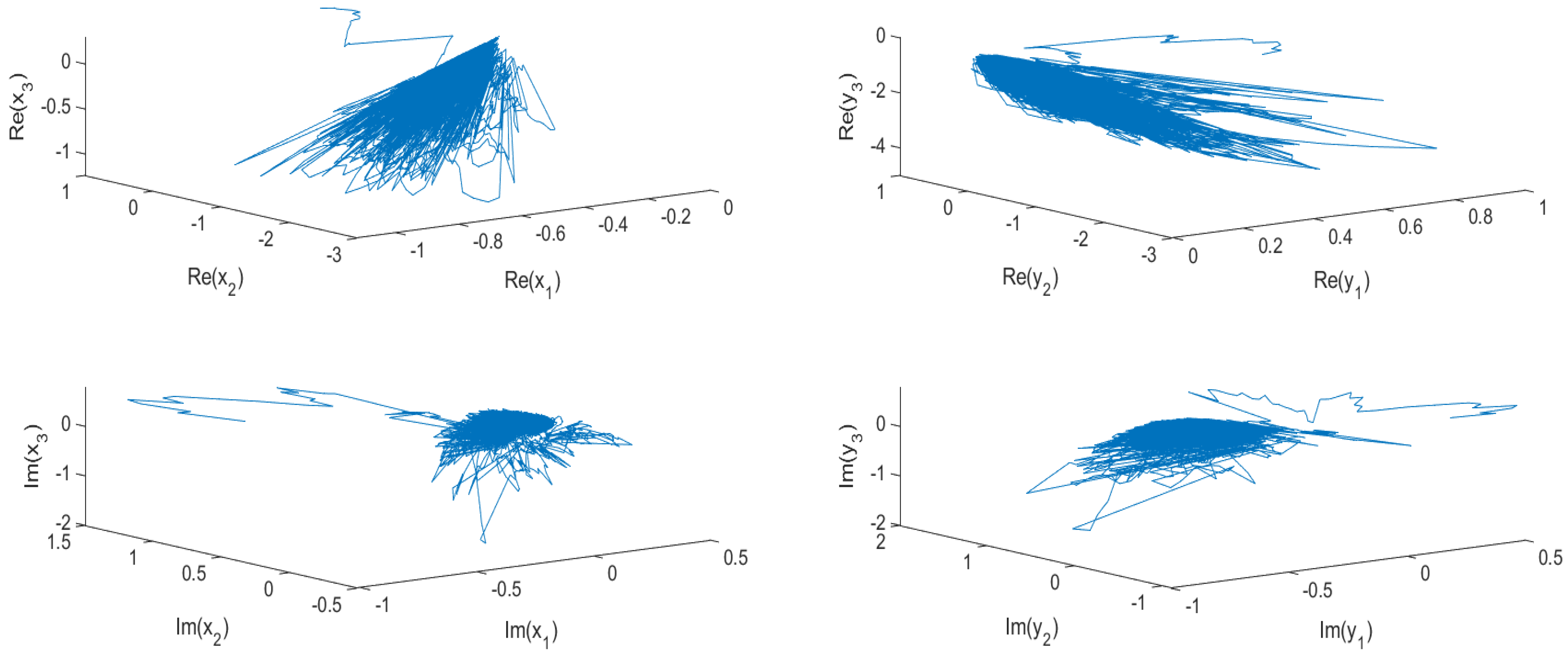
Figure 5.
Evaluation of the real and imaginary parts of FXT synchronization errors and .

Figure 6.
Evaluation of the real and imaginary parts of PDT synchronization errors and .

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
You, J.; Abdurahman, A.; Sadik, H. Fixed/Predefined-Time Synchronization of Complex-Valued Stochastic BAM Neural Networks with Stabilizing and Destabilizing Impulse. Mathematics 2022, 10, 4384. https://doi.org/10.3390/math10224384
AMA Style
You J, Abdurahman A, Sadik H. Fixed/Predefined-Time Synchronization of Complex-Valued Stochastic BAM Neural Networks with Stabilizing and Destabilizing Impulse. Mathematics. 2022; 10(22):4384. https://doi.org/10.3390/math10224384
Chicago/Turabian StyleYou, Jingjing, Abdujelil Abdurahman, and Hayrengul Sadik. 2022. "Fixed/Predefined-Time Synchronization of Complex-Valued Stochastic BAM Neural Networks with Stabilizing and Destabilizing Impulse" Mathematics 10, no. 22: 4384. https://doi.org/10.3390/math10224384
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.